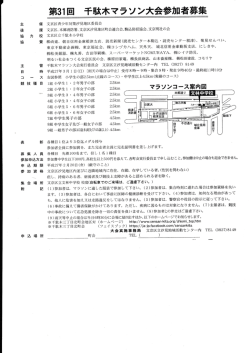
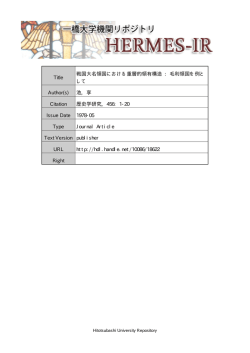
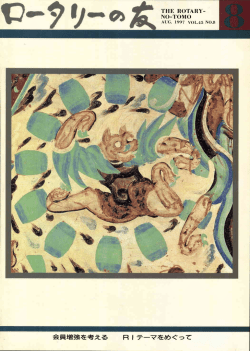
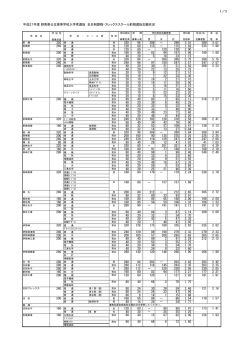
SURE: Shizuoka University REpository http://ir.lib.shizuoka.ac.jp/ Title Author(s) Citation Issue Date URL Version エクセルBASICとUSBインターフェースを用いたプログ ラムロボット教材 亀山, 寛; 宮崎, 克久; 野間, 翔太朗 静岡大学教育実践総合センター紀要. 12, p. 87-103 2006-03-31 http://dx.doi.org/10.14945/00002820 publisher Rights This document is downloaded at: 2015-01-31T23:10:58Z m12p.87∼ 103(2006) 静岡大学教育学部附属教育実践総合 セ ンター紀要 エ クセルBASICと USBイ ンター フェースを用 いた プログラムロボット教材 Progranllned Robot Materials Using Excel Basic and l」 SB Interface *2 *l・ 野間翔太朗 亀山 寛 ,宮 崎克久 Hiroshi KAMEYAMA,Katuhisa MIYAZAKI and Shoutarou NOMA 1 はじめに 技術 0家 庭 の時間数 の減少 した中で、技術 とものづ くりに独 自性 のある新 しい実践 が登場 し てい る中で、特筆すべ きは現在 中学校 で ロボッ トコンテス ト (以 下 ロボ コン)の 普及 が拡 が つ てい る点である。高専、大学や工業高校 において拡 がつた ロボ コンは、中学校 で1990年 代 に先 2)。 現在 では中学校 において、毎年全国規模 の 駆的な技術科教師 によって実践 が開始 された ロボ コンが開催 され、2005年 で 5回 を数 えてい る3)。 静岡県 において も技術科教師が ロボ コン 1ヽ 5)。 4)、 これ らロボ コンは技術教育 にお 現在 ではかな り普及 して い る 学習 を実践 し続 けてお り では づ 中学校 に広が りを見せて い るロ いては機械領域 の教材 と位置 けられ るものである。現在 ボ コンをプログラムで制御す るプログラムロボ コンヘ発展 させ ることが望 まれ る状況 になって い るとい えよう。 技術科教育 において、 ロボッ ト車 な どを コンピュー タプログラムで制御す る ことは、以前 の 「情報基礎」時代 か ら持続的 に行われてきた。著者 の 1人 も、かな り以前 にプログラム制御す る教材 をい くつか開発 した 7)。 それ らの中 にはプリンタイ ンター フェース と ViSual Basic 7)。 しか し、Visual Basic (VB)で ロボ ッ ト車 を使用 して プロ グラム制御 する教材 もあつた 6、 がほ とん どの中学校 のパ ソコン室 に備 えられていなか った ことな どの要因で、ViSual Basicで ロ ボ ッ ト車 をプ ロ グ ラム制御 す る教 育実践 は試 み られ る こ とはほ とん どなか った。 また Windows2000以 降 のOSで は、プ リンタイ ンター フェースをビッ ト単位 の制御 に用 い ること はOSの 仕様 上、困難 になってい る。 現在 では、 ロボッ トのプログラム制御 をうた つた教具が、 い くつかの会社 か ら市販 されてい る。それ らは初心者 向けを意識 しす ぎて、アイ コンの組 み合わせで プロ グラム を作成 した り (A、 B、 C社 製 8))、 現実 のプロ グラム言語 とはるか に乖離 した、対象 の ロボ ッ ト教材 を制御 す る ことのみを想定 して い る専用言語 を用 いて いた り (D社 製)し て い る。 ロボット教材 しか 制御 で きない ような特殊 な言語 を用 いて場合、や さしい とい う長所 は所有するものの、汎用性 と発展性 に欠けた、応用 ソフ トウェアの教育 に近 い ものになつて しまう。制御教育 は意図 して い るが、 プログラム教育 を軽視 した もの となつてい る。制御教育 に大 きな力点をおき、現実 の *1静 岡県函南町立函南中学校 *2静 岡大学教育学部学生 亀山 寛・ 宮崎克久・ 野間翔太朗 プログラム教育をほ とん ど考慮 しない場合 は、情報技術 の基本の教育 として あまり相応 しい と 言えない。 また研究指定校以外は現実の中学校 に導入できないよ うな非常 に高価である市販品 (E社 製)も ある。 これ らの市販品共通 していえることはロボッ トを制御す る教育 に大 きな力点をおき、 プログ ラム教育をあま り重視 してない点である。 と同時 に現在普及 しつつ ロボ コンをプログラムロボ コンまで発展 させ る考慮 は してない し、適用 もで きないこ とも共通 してい る。現状 では情報技 術 の基本を教育す ることを 目指す ようなプログラムロボ コンを中学校 に普及 で きる教材 は開発 で きて いない。 また、大 きなメーカが開発 した 「アイボ」 な どの本格的なロボ ットは、経済的 な観点か ら普通 の中学校で導入で きるわ けで はないので、本研究の分析や研究 の対象 としない。 以上の状況を考慮 して、本研究 はロボ コンをプログラムロボ コンまで発展 させ ることができ、 かつ情報技術 の基本 を教授で きるプログラムロボ コンを中学生用の教材 として開発することを 目的 としている。 数年前 よリコンピュー タ と周辺機器 とを接続するイ ンター フェースがRS232Cや セン トロニ クス、SCSIか らUSB(Universal Serial Bus)に 変わ り9)、 そ して周辺機器 とを接続す るイ ンター フェースの主流 とな りつつ ある。ホ ッ トプラグ、 プラグアン ドプレイ (PNP)と ハ ブ 接続 に対応 し、電力供給 も可能である。 マ ウス、キーボー ド、プリンタ、MO、 CD、 DVD、 ハー ドディスク、 ス キャナ、USBメ モ リ等の多 くの周辺機器のUSB化 が進んでいる。USB2.0 の仕様で転送 ス ピー ドもず いぶ ん速 い もの となっている。 このUSBを 利用 した教育用 の制御 教具の開発 も重要である。。 ホ ッ トプラグ、 プラグアン ドプレイの機能 は教具 の機能 を高 める ものである。前研究。 はUSBの デバ イス ドライバ の開発 を主 とした ものであったが、今回は USBイ ンター フェース と接続 した ロボッ ト教材 の開発 に焦点を合わせ る。 情報教育 は小学校、中学校、高等学校、大学 で進展 してい る。 しか しなが ら中学校技術・ 家 庭科 にお ける 「情報 とコンピ■― 夕」 の中で、技術科色が濃 くて、独 自性 のある教材 がほ とん ど見受 けられない。 プログラムロボ コン教材 は 「情報 とコンピュー タ」 にお ける技術教育 の独 自性 が強 い教材である。本研究 はほ とん どすべての中学校 の コンピュー タ実習室で も備 えてあ るエ クセルのBASIC(VBA:Visual Basic For ApplicatiOn、 以後VBAと 呼ぶ)と USBイ ン ター フェース を用 いて、現在中学校 に普及 しつつ あるロボ コンに用 い られるロボッ ト車 をプロ グラム制御 できる教材 システムを開発す るこ とを意図 した ものである。今回の研究ではプログ ラムロボ コンの教具 と教材開発 に重点 をおいて行 い、授業実践は開始 してい るものの、その報 告 は簡単な紹介 に留める。 プログラムロボ コンの教具 と教材 には以下 に示すように多面的で、 かつ解決が必要な多 くの課題 を抱えてお り、 これ らの課題 解決だけで十分な検討が必要 な こと も、本研究をプログラムロボ コンの教具 と教材開発 に重点においた理 由である。プログラムロ ボ コンの授業を成立 させ るためには、一定の経験、技能、 ノウハ ウが必要 であ り、本論文では これ らのノウハ ウを積極的 に記載 し、 プログラムロボ コンの授業遂行 に必要な情報を提供する こ とをも意図 した。 また本研究で得 られた情報や結果 をWebペ ー ジ0に 示 した。Webペ ージを作成する ことに よって、テキス トだけで説明する ことが困難な情報を動画などで視覚的 に示す ことが出来 るか らである。今後 は情報教育 の研究や教材開発 に大 い にWebペ ージ を利用すべ きであるが、本 研究 は内容の一部分 としてWebペ ージの作成 も含んでお り、Webペ ージ を積極的に援用 した ところに本研究 の特徴がある。 ' エ クセルBASICと USBイ ンター フェース を用 いたプログラム ロボッ ト教材 2 プログラムロボ ッ トの八― ドウェアとソフ トウェア この章ではプログラムロボ コンを実現す るためのハ ー ドウェア とソフ トウェアに関 して論述 し、そ してVBAを 用 いたプロ グラ ミング教育 の利点 を考 える。 2-1 プログラムロボ ッ トの八― ドウェア プログラムロボッ トのハー ドウェア として次 の ものが挙げられ る。 ・ ロボッ ト製作 に使用 され るキッ ト ・ USB用 マイクロコン トロー ラCY7C63001を 用 いたUSBイ ンター フェース ロボ コンの中学校 へ の普及 に伴 つて、中学生が製作す るに適 した ロボッ トの製作 キットが数 社 (例 えばB、 F社 )か ら販売 され るよ うにな り、 ロボ コン学習 の環 境 は整 って きた。そ して キッ トを構成す る部品の性能 も向上 して い る。筆者 の 1人 が 10年 以上前の 「情報基礎」時代、 MS¨ DOS上 で動作す るプログラム駆動 ロボ ッ トを開発 した時 6)に は、ギヤ ー ボックスの性能 の悪 さに起 因す る走行性 の悪 さに大 いに悩 まされた。当時 のギヤーボックスはその中に、径 の 大 きい鉄製 の歯車 と径 の小 さい真鍮製 の (ウ ォーム型)歯 車 を組み合わせて用 いて いた (F社 製)。 鉄製 の歯車 は薄 いため、歯車 のかみ合わせ に問題 があった。真鍮製 の歯車 の箇所 は摩耗 しやす く、歯車 の山が簡単 に削れて しまい、それがプログラムに大 きく影響 し、 そ して使 い込 み と共 にプログラムを変更す る必要があつた。 さらに使 い込 んで ゆ くと歯車が空回 りをし、そ の役割 を全 く果 たさな くなって しまい、ギヤーボックス全体 を交換 した。当時の部品の性能で は、中学生が製作で きる直流 モー タ駆動 の ロボッ ト車 では、満足 なプログラムロボ コンを成立 させ ることが難 しかつた。 、 ス (F社 製)は プラスチ ック製 の歯車 が それ に対 して、現在の製作 キッ ト中のギヤ ー ボ 'ク い つ と か さが十分であ ギヤー比を変更で き、機能がかな り向上 用 られてお り、材料強度 厚 り、 し、そして価格 も高価でない。 このため直流 モー タ駆動 の ロボッ ト車 に対 して、プログラムに よる走行の再現性が向上 した。構成部品 の性能 の向上 によって、中学生が製作で きるロボット 車でプログラムロボ コンを成立 させ る物的な条件 が整 つてきたことを指摘 したい。 USBイ ンター フェースはパ ソ コン とロボッ ト車 の接続 が容易 であ り、 ロボ ッ ト車 の教材 と しての利便性 を向上 させて い る。OSは Window 2000や Windows XPで も使用で きる。 また 出力 は 8ビ ッ ト、入力 は 4ビ ッ ト使用で きる。 2-2 プログラム ロボ ツ トのソフ トウェア プログラムロボッ トのソフ トウェアとして次の ものが挙 げられ る。 ・ USBイ ンター フェース をVBAで 利用 できるよ うにす るvbausbio.dl114) ・ エ クセルに付属 してい るVBA vbausbio.dllは 米国のサイプ レス社製USB用 マイ クロコン トロー ラCY7C63001に 対応 した ものであ る。サイ プレス社製 のUSB用 マイ クロコン トロー ラ としては低規格 (USBl。 0)、 低 価格 であるが、教材 の機能実現 には十分な性能 を持 つてい る。 著者 の 1人 が数年前 にCY7C63001に 対応 したデバ イ ス ドライバ とそれ に対応 したVB用 の DLLフ ァイル を開発 し、VBを 用 いて ロボ ッ トとやLED点 滅 が制御 で きること示 した 実際 の問題 として、教具 の使用 と普及 に当 たっては、独 自のVender IDを 取得す る必要がある。 101。 亀山 寛 。宮崎克久・野間翔太朗 しか し経済的な理 由な どで、 い まだVender IDを 取得 して いない事情 と、CY7C63001の 仕入 れに関 して、例 えば 「最低発注数2,800個 、単価200円 、合計56万 円、納期 5ヶ 月」 のよ うな条 インストー/1/「 発 私 vbOし gbb dlを OSIの フォルタにコピこします。 イ場壺ヨ塾基 ス く た ン ー イ ト の う ま ゆ き ま し 。 ル 果.PTr朋 よ 結 こZ7]11婦『 【 二 よ ま 」 三 塩り す 。PY"NNT¥sfr扁 : │ :性 J瞥 図 1 インス トールプログラムProlnstall.exeの 実行画面 件 を受 け入れ な い と商社 か ら購 入で きな い な どの理 由か ら、今 回 は独 自開発路線 を採用せ ず に、 デバ イ ス ドライバ を埋 め込 んだ市販 品 を採用 した。 最初 に使用 す るパ ソ コ ン 内 にvbausbio.dllを System32も し くはSystem(WindOws 98や Windows Meの 場合 )に コ ピー す る必 要 が あ る。実 際 に技術 科教 師 と接 して、 この コ ピー作 業 が 技術 科教 師 に とってか な り負担 に な る こ とが わか ったので 、 これ を 自動 的 に行 うソ フ ト Prolnstall.exeを 作成 し、Webペ ー ジ とテ キ ス トの付録 に掲載 した (図 1参 照 )。 作成 に使用 した言 語 はVBで あ る。 また、エ クセル に付属 して い るVBAの 利用 法 を作成 したテ キス トか ら転載 して図 2に 示 した。 (3)エ クセ ル上 でVBAを 起動 す る。 錮 「 ツール」 図2 → 「マ ク ロ」 → 「Visual Basic Editor」 回 エ クセルVBAの 起動方法 (作 成 したテキ ス トでの記述 ) エ クセル で プ ロ グラム を作成 して ゆ く際 に、 エ クセルのセ キ ュ リテ ィ レベ ル を変更 す る必要 が あ る場合 が あ る。 この変更 は最初 の 1回 で よ く、変更方法 はテキス トの付録 に示 した。 2-3 VBAを 用 いた プログ ラミング教育 の利点 本研究 で は中学校 の 「情報 とコ ンピュー タ」 の教材 で あ るプ ロ グラ ミン グ ロ ボ コンにおいて、 エ クセルBASICと USBイ ンター フェースを用 いた プログラムロボッ ト教材 敢 えてプログラ ミング言語 としてVBAを 用 いたが、VBAを 用 いたプログラミング教育の利点 として次の点があげられ る。 1)オ ブジ ェク ト指向ス タイル をもつ言語であ り、現代 のオブジェク ト指向言語 を教育す る 側面 をもつ。 プログラムの第 1段 階 として、既存 の クラス (ツ ールボ ックス)を 利用 して、 ベージ内の設計 を行 い (オ ブジ ェク ト化)、 第 2段 階 として、ペー ジ設計 の後 に制御 コー ド を書 き入れて、 プログラミングを行 うや りかたである。 2)BASICを 基本 として い るので、技術科教 師が 「情報基礎」時代、MS‐ DOS上 のBASIC でプログラム教育を行 つていた経験 と知識 を生かせ る。 3)エ クセルに付随 してい るので、ほ とん どすべての中学校 で利用 できる。 4)自 宅でパ ソコンとイ ンターネ ッ トに接続で きる環境 をもつ生徒 が増加 してい るが、VBA を用 いた場合、生徒 の 自宅での学習が可能 となるし、 プログラムロボ コンの授業終了 した後、 生徒 が 自宅 にロボッ ト車 を持ち帰 って も、VBAを 用 いて動 かす ことが可能 である。 5)「 情報 とコンピュー タ」必修項 目での技術教育 の観点か らの情報技術教育が可能 となる。 すなわち、必修分野 でVBAを 用 いたハ イパー テキス ト作成 を学習 し②、選択分野 でVBAを 11)こ とである。 用 いたプログラムロボ コンを学習す る展 開 を行 う 「 「 6)高 校 での普通教科 情報」 の教育 に生かせ る。教科 情報」 でプログラミングを扱 うこと になって い るが、すべ ての コンピュー タ実習室で使用で きるプロ グラミング言語 として、 VBAが 考 えられてお り、教科書 の記述 力WBAに 依拠 して記述 されてい るケース もある0。 7)VBAで のプログラムロボ コン学習では、1ペ ージ内に複数 の リンクされたオブジ ェク ト をもつページか ら構成 され る複数 ページの作成 を行 うことになる。 この複数ペ ー ジ作成 はそ れ 自身、ハ イパーテキス トを作成 して い ることになる。 8)VBAで 作成 された複数ページば一 つのエ クセル ファイルにまとめてあるので、保存、 コ ピー な どの フアイル管理 が容易 である。一方VBを 用 いた場合、複数 ページ (フ ォーム)を 作成す ると複数 のフアイルに分散す るために、初心者 には トラブル要因 になる場合があるが、 この点、VBAの フアイル管理がはるかに容易 である。 3 ロボコンからプログラムロボ コンヘ 最初 に記述 した ように、中学校 に もロボ コンが普及 しつつ ある1 5)。 ロボ コン用 に作成 した ロボ ットをプログラムロボ コンに利用す る教材 を開発す ることが本研究 の 目的の一つである。 ロボ コン用 に作成 した ロボッ トをプログラムロボ コンに利用す るための留意点 を 4点 示す。 プ ログラムロボ コンの場合、迷路 を通 り抜 ける ことが重要な課題 となる。迷路 を通 り抜 けるアル ゴ リズ ム として、左手 1方 向 (あ るいは右手 1方 向)の 走行 を採用する。そのために壁 はい走 行 が必要 である。 留意点 1)ロ ボ ッ ト車 は後輪駆動型 で製作す る。 現在、筆者 らが調査 した範囲内において、中学生用のロボ コンのロボッ ト車製作模型 キッ ト は前輪駆動型 を採用 して い る (B社 とF社 )。 例 えばF社 の ロボッ ト車製作模型 キッ トの製作例 は図 3の ように前輪駆動型 となってい る。 ロボッ ト車製作模型 キッ トが前輪駆動型 であるのは、 ロボ ッ ト車 にス ピー ドが要求 され るが、ス ピー ド走行 には前輪駆動型が有利であることに よる 亀山 寛・ 宮崎克久・ 野間翔太朗 図 3 前輪駆動 ロボット車の製作例 (F社 ) ため と推定 され る。 前輪駆動型 の 3輪 車 は構造上、 プ ロ グラムで壁 はい走行 を持 続 しよ う とす る と、 数 回 の壁 は い走行 の後、車 の 向 きが壁 と直角 に 向 いて しまい、走行 がで きな くな る。 この ことは数種 の前 輪駆 動 の 3輪 ロ ボ ッ ト車 を作成 し、壁 はい走行 を試 みた実験 結果 で あ る。 その一 例 の 動画 を Webペ ー ジ に示 したり。本研 究 にお い て前 輪駆 動 の 3輪 ロ ボ ッ ト車 は、実 際上 の 問題 として プ ロ グラムに よる壁 はい走行 が 困難 で あ る こ とがわか った。現実 的な走行 において、 3輪 を構 成 す る玉 ボー ラが構造 上、 固定 した回転軸 とな らな いか らで あ る。壁 はい走行 がで きな い とプ ロ グラムに よる迷路走行 に困難 を来 た す。前輪駆動 の 3輪 ロ ボ ッ ト車 はプ ロ グラムロボ コンに 不適 で あ る。前 輪駆 動 の ロ ボ ッ ト車 キ ッ トを後輪駆 動 に変更 す るには取 り付 け部 品 の大部分 の 配置 を変更 す る こ とにな る。製作 した後 での変更 は全 面 的 に作 り直す こ とにな る。 ロ ボ コ ン時 の ロ ボ ッ ト製作 の最初 か ら後輪駆動型 に作成 す る こ とが、 プ ロ グラムロ ボ コ ンヘ の移行 へ の大 きな必要条 件 で あ る こ とが わか った。 留意点 2)ロ ボ ッ ト車 に制御基盤 を付加 す る。 ロ ボ コ ン用 時 に製作 した 車 に、 USB用 マ イ ク ロ コ ン トロー ラCY7C63001が 組 み込 まれ て い る制御基盤 (図 4)を 付加 すれ ば プ ロ グラム ロボ コンが 可能 とな る。図 4に 示 した基盤 の大 き さは49× 55面 で あ る。 4モ ー タ制御可能で あ るが、本研 究で は 3モ ー タを用 い、基盤 にはモ ー タ ドライ ブICの LB1630は 3個 取 り付 けて あ り、 あ と 1個 追加 で きるよ うに して あ る。 モ ー タ ドライ ブLB1630を 1個 追加 し、 4モ ー タ制 御 をす べ て使用 すれ ば、 か ら くり人形 ロ ボ ッ トや パ フォーマ ンス ロ ボ ッ トも可能で あ り、 これ らの ロボ ッ ト教材 の 開発 は今後 の課題 で あ る。入 力信号 は 4ビ ッ ト可能 で あ り、今 回 は 4個 のスイ ッチを接続 す る。 この制御基盤 の 回路 図 を図 5に 示 す。電源 は単 3電 池 4個 で 間 に合 うが 、長 時間使 用 す る場 は 合 外部電源 3か ら 5Vの 使用 が望 ま しい。 また現実 的 な問題 として、 USBケ ー ブルの長 さ と 太 さの 問題 が あ る。 ケ ー ブル の長 さは 3m程 が適 度 で あ った。 USBケ ー ブル の太 さは細 い ほ どよいが 、市販 されて い るケ ー ブル は太 す ぎたので、市販 の フラ ッ トケ ー ブル用 の細 い線 を裂 い た もの を付 け替 えて使用 した。 ケ ー ブル線 の数 は 4本 のみで あ り、実際 の半 田付 け作業 な ど エ クセルBASICと USBイ ンター フェース を用 いた プログラムロボ ッ ト教材 図4 CY7C63001が 組み込んだ制御基盤 (モ ータドライブLB1630は 3個 のみ) はそれほ ど難 しくない。なお この制御基盤 の回路図 とCY7C63001が 組 み込んだ制御基盤 のプ ロ トタイプは本研究で開発 した ものである。CY7C63001に はDIP型 とSC型 があるが、DIP型 を用 いた。SC型 にはハ ング接着 に難点があ り、中学生用 の教具 として制作上適 さない。 留意点 3)ロ ボッ ト車 にセ ンサー用 スイ ッチを 4個 付加す る。 単純な電気的 なON‐ OFFス イッチをセ ンサ ー用 として用 いた。 2個 は壁 との衝突検知 に用 い、1個 はゴール検出 に用 い る。残 りの 1個 は割 り込みで ロボッ ト車を止めるのに用 いて い る。 VBAに はタイマオブジェク トがな く、 プロ グラム的 にロボ ッ ト走行 を止める ことがで きない 場合 が生 じるか らである。壁 との衝突検 知 とゴール検出 はスイ ッチの取 り付 けの高 さの違 いで CY7C63001 P13 P12 Pll 図5 Pl 回路 図 93 亀山 寛・ 宮崎克久・ 野間翔太朗 行 う。本研究で作成 した ロボッ トでは、壁検出用 が32nlm、 ゴール検出用 が10mmで あった。 留意点 4)ロ ボ ッ ト車 に壁 はい用 の ロー ラを 2個 付加する。 壁 はい用 の ロー ラは車輪 の外側 に位置す るように、かつ競技所 の壁 の高 さ以 内に設置する。 また ロー ラが滑 らかに回転す るように取 り付 ける必要がある。使用 した ロー ラの直径 は1311mか ら1511mで あ り、 ロー ラを取 り付 けた高 さは35nlnで あった。 以上の留意点 を考慮 に入れて作成 した後輪駆動 の ロボ ッ ト車 を図 6に 示す。後輪駆動 の ロ ボ ッ ト車 が壁 はい走行す る動 画 の一例 をWebペ ージに示 した0。 この動画 には入カゲ ー トで 4個 のピンポ ン球 を拾 い、壁 はい走行 を行 い、角 (か ど)の 壁を検出 し、直角に曲がつて走行 する様子 と、 ゴール を検出 した後、運 んで きたバ スケッ ト内のピンポン球を ゴール内 に入れ る ロボ コン車 の映像が納め られて い る。一つの方向の壁 はい走行が可能ならば、複雑な迷路 も理 論上通 り抜 けるこ とが可能である。 ロボッ ト車 の長 さは台車 の部分 で18cm、 幅 は車輪 とロー ラ 部分 を入れて13.5cm(バ スケッ ト部分 は含 まない)、 高 さはアーム部分を入れて30cmで ある。 図 6 後輪駆動 ロボット車 4 プログラム ロボ コンの授業 テキス トとWebペ ー ジ作成 と授業展 開 4-1 プログ ラム ロボ コンの授業 テキス ト作成 作成 した ロ ボ ッ ト車 を用 い た プ ロ グ ラムロ ボ コ ンの授業 で用 い るためのテキス トを開発 した。 テ キ ス トをPDF化 し、Webペ ー ジ に示 した1つ 。 中学 生 がVBAを 用 い て、 制御 プ ロ グ ラム を作 成 して ゆ くこ とを考慮 して、 エ クセ ル フ ァイ ル 「生 徒用 車制御 。 xls」 (図 7)を 各 生 徒 に与 え て、生徒 が この フ ァイル を加工 す る こ とか らプ ロ グラムロボ コ ンの授業 を開始 す る。 この フア イ ル にはUSBイ ン ター フ ェー ス を利用 した制御 の た めの最初 の基本 的 プ ロ グ ラム が 組 み込 ん で あ る。 また、 2枚 の ユ ー ザ フ ォ ー ム (ペ ー ジ)が 挿 入 して あ る。「生 徒 用 車 制 御 .xls」 は Webペ ー ジか らダ ウ ン ロー ドで き る。開発 した テ キス トは エ クセ ル フ ァイ ル 「生 徒 用 車 制 xls」 御。 を使用 す る ことを前提 として作成 して あ る。 本 テキス トは次 の よ うな 目次 で構成 されて い る。 第 1章 エ クセルVBAで 私 の ロボ コンペー ジ作 り エ クセルBASICと USBイ ンター フェース を用 いたプログラムロボッ ト教材 嘩 1紺 グラム1耐″ ″ぶリ ハプロー 。 。■■ 年,■ F叫 壁JI │。 0「 1麟 ImO,中 ● t彙 序■ ‐ r“ ■ `釉 1-: ,IfF"L=1肇 31中 ‐ ‐ li 1 11 工,vP 鵬 ■ 躙 1 ,63.0 1 11 1:: │=憮 Ⅲ 11漱 :│ ●● I自 :: 図 7 生徒用車制御.xls 第 2章 第 3章 第 4章 簡単 な ロ ボ ッ ト制御 プ ロ グラム を作成 しよ う プ ロ グラムで ロボ ッ トを リモ コ ン操作 しよ う 第 5章 壁 は い走行 す るロボ ッ トの プ ロ グラム を作成 しよ う ロボ ッ トに 自動 で迷路 を通 り抜 け、 ゴ‐ル に ピンポ ン球 を入れ させ よ う 第 6章 情報技術 と現代社会や職業 付録 .イ ンス トー ル とエ クセルのセ キ ュ リテ ィ レベ ルの設定 全体 で は23ペ ー ジの分 量 で あ る。VBAに よるプ ロ グ ラム は通 常 は煩雑 な扱 い 方 が 多 く、簡 単 な もの とい えな い。 しか し、 ロ ボ ッ ト車 の プ ロ グラム制御 は生 徒 たちに とって大変興 味深 い 事 で あ り、 プ ロ グラムの結果 を ロ ボ ッ ト車 の動 きで知 る こ とがで き、 関 心 をひ きやす い。 これ らの制御 プ ロ グ ラム に対 す る興 味 と関 心 で 、VBAの か な り煩雑 な使用 方法 を習得 で き る と こ ろが あ る。 テ キ ス トの詳 しい 内容 はWebペ ー ジか ら知 る こ とがで きるので、 ここで は各章 の 簡単 な内容 と編集 の意 図 を示 す。 第 1章 「エ クセルVBAで 私 の ロ ボ コ ンペ ー ジ作 り」 はエ クセ ルVBAの 使用 方法 を学 ぶ こ と に限定 してお り、 ロボ ッ ト車 の制御 プ ロ グラム コー ドは扱 わな い。 エ クセルの立 ち上 げ画面 か ら、VBAの 画面 (Visual Basic Editor)を 開 くこ とで始 まる。 図 6で 示 されて い る生徒用 車 xlsの VBAの ユーザ フォー ム 1に 自分 の氏名 を入力 し、 プ ロ グ ラム ロボ コ ンヘ の 自分 の思 制御 。 い な どを書 き入れ る こ とが最初 の課題 で あ る。 ユーザ フォーム 2に 、 ラベ ル を貼 り付 け、 タイ トル を入 れ、 イ メ ー ジ に ロ ボ ッ ト車 の写 真 な どを貼 り付 け るな どを通 して、VBAで の ペ ー ジ 内 のオ ブジ ェク トの作成 法 とプ ロパ テ ィの使用 方法 を学 ぶ 。 これ らを通 じて、VBAの 扱 い方 を学 習 す る記述 とな って い る。 また、 ペ ー ジ 間 の リ ン ク方 法 としてshowと hideを も学 ぶ 。 VBAの 扱 い 方 が 初 めて の生 徒 を想 定 して い て、 第 1章 はVBAの 基 本 的 な扱 い 方 にか な りの ペ ー ジを割 いて記述 して あ る。 第 2章 「簡 単 な ロボ ッ ト制御 プ ロ グラム を作成 しよ う」 か らロ ボ ッ ト車 を制御 す るプ ロ グラ ム コー ドを学 ぶ 。最初 には コンピュ ニ タ に よるモー タ回転 を制御 す る し くみ を載 せ た。第 2章 亀山 寛・ 宮崎克久・ 野間翔太朗 の最初 の課題 は 「UserForm l(ユ ーザ フォー ム 1)「 前 へ」 ボタ ン と 「止め る」 ボタンに前 進 と止めるプログラム を作成 しよ う 」で ある。 ロボ ッ ト車 を 1秒 前進 → 1秒 止 まる→ 1秒 後 退 の プログラムの記述例 を リス ト1に 示す。 リス ト1 ロボッ ト車を 1秒 前進→ 1秒 止 まる→ 1秒 後退 のプログラム Out(10) ' 前へ Wait(1000) out(0) Wait(1000) out(5) Wait(1000) out(0) ' 1秒 持続 '止 ' 1秒 持続 ' 後ヘ ' 1秒 持続 ' 止 まる リス ト1か ら、 ロボッ ト車 の走行 を制御するプログラムはか な り簡単であることが伺 えるで あろ う。 「プログラムで ロボッ トを リモ コン操作 しよう」 に入 って、 この ところでは 第 3章 、 じめて生 徒 は 自分で新 しいユーザ フォー ムの作成方法 を学 ぶ。 これ は、VBAの 操作法 も制御 プロ グラ ム学習の深化 と共 に学ぶ ように配慮 した結果である。 リモ コン操作 はマ ウスに よる方法 とテ ン キー に よる方法が組み込 まれてい る。テ ンキー に よるリモ コン操作 はテキス トボ ックスの入力 操作 を利用 す ることによって行 ってい る。テ ンキー に よるリモ コン操作 によって、 リモ コン ボックス を用 いて手動制御す るの と同様 な操作がテンキー操作 で行えるこ とになる。 第 4章 「壁はい走行するロボ ッ トのプログラムを作成 しよ う」で入カセ ンサー を利用す るよ うになってい る。入カセ ンサー を用 いた、前進→壁 に衝突を検知→後退を続 けるプログラ ム例 を示す。 ン │ リス ト2 前進 →壁 に衝突を検知→後退を続 けるプログラム例 Fori=l To lo out(10) ' 前進 Wait (50) If inA=6 Then Out(5) Wait(1000) ' 衝突検知 ' 後退 ' 1秒 持続 End lf Nexti ' 止 まる but (0) ロボコン車の前の左右に取 り付けた 2個 のセンサーを利用すると細やかな動 きが制御できるよ うになる。すなわち、ロボット車の壁への衝突の位置状態が、1)右 センサーのみによる衝突 情報、 2)左 センサーのみによる衝突情報、 3)左 右同時の両方のセンサーによる衝突情報、 によっておのおの異なるので、三つの位置状態に対応 したプログラムを組むことによって、 ロ ボット車の走行を細かに制御できることになる。 第 5章 「ロボットに自動で迷路を通 り抜け、 ゴールにピンポン球を入れさせよう」では図 8 のような競技場で ピンポン球を拾い、壁 はい走行を行い、迷路を通 り抜け、 ゴールに到着 し、 エ クセルBASICと USBイ ンター フェース を用 いたプログラムロボ ッ ト教材 ゴールにピンポ ン球 を入れ る競技 を想定 して い る。競技場 の作成 で重要な点 は壁の高 さであ り、 今回 は競技場の壁の高 さは内側 で5011mに 設定 した。壁はい動作をうまく行 うには、バ スケッ ト を壁の高 さ以上に持 ち上げて走行す る必要があ り、 このこ とによ り壁 の高 さの上限が定 まる。 また ロー ラが壁 に接触す る必要 があ り、 この条件 か ら壁の高 さの下限が定 まる。 また、走行す るには競技場の底板 に化粧 カ ラー合板 お もて面、アクリル板や プラスチ ック板 の使用 は、 ロ ボッ ト車が滑 って空 回 りするので不適である。 レース場 の底板 には一定 の摩擦を生 じる粗 さが 必要である。 図 8か らわか るように迷路 には、取 り外 しが可能なように長方形 の木製 ブロ ック 図8 プログラムロボコン競技場 をクランプなどで固定 して作成 した。 図 8の 競技所 の大 きさは畳 1枚 分 (180× 90面 )の 広 さがあ り、 ロボッ ト自体 の大 きさを考 慮すると、図 8程 度 の迷路 しか設定で きない。図 8と 同様な競技場 をもう 1レ ーンを作成 し、 練習では別 々に使用 し、大会では 2レ ー ンを組み合わせて、一つのレー ン とし、 もっ と複雑な 迷路 を作成するこ とを構想 して い る。 プログラムロボ コンには競技 ルールが重要な役割を果たす。本テキス トに掲載 した例 を以下 に示す。 プログラムロボコンのルール例 バ スケッ トの変形や作 り直 しは行 って良い。 ただ し、作 り直 しを行った場合 は、競技後 もと のバ スケッ トにもどす こ と。 自分 の ロボッ トで競 技 に参加するこ と。 得点ルール 1)出 発点で ピンポン球 をバ スケ ッ トに入れ る。 ピンポ ン球 1個 につき、 この操作をプログラ ムで行 うと4点 、 リモ コンで行 うと2点 とす る。60秒 以内で 3回 まで試みるこ とが 出来 る。 ピンポ ン球 1個 もしくは 0個 の時 は手渡 しで 2個 受け取 ることができる。手渡 しを選んだ 場合 は 0点 とする。 リモ コン時 と手渡 し時 はバ スケッ トの高 さをリモ コンで調節する。 ま たピンポン玉の最大個数は 5個 まで とす る。 2回 日以降の試行 は 2点 ずつ の減点 とする。 最高得点20点 で最低得点 は 0点 。 2)壁 はい走行でチ ェ ック点を 1カ 所通 り抜 けた ら、 5点 追加する。 4カ 所チ ェ ック点が競技 場で設定 してあ り、合計20点 3)ゴ ール箇所 に到達 して、 ゴール を検出で きた ら5点 追加 4)ゴ ールにボール を規定 のゾーンAに 自動で入れ ることが出来 た ら、 ピンポ ン玉 1個 につ き 亀山 寛・ 宮崎克久・ 野間翔太朗 3点 とする。規定のゾーンBに 自動で入れた場合、 ピンポ ン玉 1個 につ き 5点 とする。 リ モ コンでゾーンAも しくはBに 入れた時 はピンポン玉 1個 につき 1点 とす る。最高得点25 点。以上合計70点 である。 5)時 間点を 3段 階設定 し、時間点 は最大30点 (時 間配分 は競技場 な どをみて決 め る)総 計 100点 競技ルール 1)競 技 は班単位 の団体で行 う。 2)予 選 は班単位で行 い、班 の得点順 に上位 2名 が決勝 のメンバー とする。同点の場合 はじや ん けんでメンバー を決定す る。予選 は班毎 に同じ時間帯 で行 うもの とする。 3)予 選 の得点 は班 の平均得点 (班 構成員の合計得点既 の構成人数)と す る。 4)決 勝 は改 めて競技 を行 い、決勝での班 の合計点数 と予選 の平均得点の総和で順位 を決める。 決勝 は同じ時間帯で行 うもの とする。 5)競 技 は競技班以外か ら 審判 2名 、計時 1名 、進行 1名 、記録 1名 を選出 して行 う。 第 6章 の 「情報技術 と現代社会や職業」 には技術教育 は情報技術 を含 めて、その教育的意義 は生活技術 に限定 され るものでな く、生産技術、現代技術、職業教育 (キ ャリヤ教育)に 寄与 すべ きとの観点で記述 した。情報技術 と職業 の記載 は次 のよ うである。 情報技術 と職業 皆 さんは技術や情報技術 を学んで きましたが、現代社会 においては、技術や情報技術 に関 わ る仕事や職業 は数多 くあ ります。テ レビや新聞などを通 じて、情報技術 に関連 した仕事や職業 に関す る情報 に接す る機会 も多 いで しょう。皆 さんも将来 この ような方面で職業 をもつ ことも あると思 い ます。 この方面 の職業 に皆 さんの力が発揮 され、 自己実現 をはか ることが実現 でき るとした らそれはすば らしいこ とです。情報技術 の分野 だ けでな く、 どのような分野 の仕事や 職業 において も、 コンピュー タを大 いに活用 して い ます。今後 もコンピュー タや ソフ トウェア と情報技術、 そしてそれ らに関連 した職業 に大 いに関心を抱 き続 け、種々の機会 で これ らの こ とを学 んで ゆ く必要があるで しよう。 付録 にはDllフ ァイルvbauSbio.dllの イ ンス トール方法 を示 した。 このイ ンス トール を自動 的 に行 うソフ トProlnstall.exeを 作成 し、Webペ ージか らもダウンロー ドできるようにしたB)。 エ クセルのセ キ ュ リティレベルの設定 も記載 した。 4-2 プログラム ロボコン用 のWebペ ージ作成 と公開 で 本研究 得 られた情報や結果 を次のア ドレスのWebペ ージに公開 した。 http:〃 pcb209e.edoshizuoka.acjp/Robo/PrORobocon5.htm 中学校 へ のプログラムロボ コンの普及 にはWebペ ージ化 が重要 と考 えたか らである。教師が プログラムロボ コンに関す る情報 と必要なェ クセル ファイル を、空間 と時間を超 えて簡単 に得 るこ とができる こ とはい うまで もない。特 に情報 とコンピュー タに関す る情報教育の内容 は教 育内容上、積極的 にWebペ ー ジを利用す る こ とは望 ましい ことで ある。 と同時 に本研究 の 内 容 は、文書 だけで説明することが困難 な情報 を含 んでお り、働 画で示す ことに よって初 めて説 明で きると考えたか らである。例 えば、前輪駆動 ロボッ ト3輪 車 の壁 はい走行 の困難な ことや、 エ クセルBASICと USBイ ンターフェースを用 いたプログラムロボット教材 後輪駆動 ロボ ッ ト3輪 車 の壁 はい走行 な どは、動画 によっては じめて理解で きる こ とな どであ る。 なお、本Webペ ージの 内容 は本論文 の内容 に深 く係 わ るものなので、イ ンターネ ッ トヘ の Webペ ー ジ の公 開 の時期 は本論文 の執筆 に合 わせて行 つた。本Webペ ー ジは次 の ようなメ ニ ュー をもってい る。 1)プ ログラムロボ コンの映像 (ロ ボッ トがプログラムで 自走 かつ玉入れの映像 ) 2)生 徒用テキス ト例 (中 学校技術・ 家庭科 「情報 とコンピュー タ」で使用 ) 3)USBフ ァイルなどのイ ンス トール情報 (ダ ウンロー ドファイル) 4)プ ログラムロボ コンプログラム例 5)ロ ボ コンか らプログラムロボ コンヘ (ロ ボ コン車を利用す るには) コ プログラムロボ ンの授業実践 を踏 まえて、将来的 にはさ らに充実する予定 である。 4-3 プログラムロボコンの授業展開の方法 プログラムロボ コンの授業 は 「技術 とものづ くり」 と 「情報 とコンピュー タ」 の両方 を含 ま せ る ことが可能なので、その授業展開 には種 々のケースが考 えられ る。 ロボ コン自体 が 「技術 とものづ くり」 に属す る教材なので、 プログラムロボ コンは 「情報 とコンピュー タ」 の教材 と して扱 うのが適当であろう。以下 に代表的な授業展開の方法 を示す。 1)プ ログラムロボ コンのみを選択技術 で展開す る。 ロボッ ト車本体 を用意する方法 と、生徒 が 自作するの方法 とに分 かれ る。 自作 の場合 は学習 内容が多 くなるので、時間的 にか な リハー ドになる。 ロボッ ト本体 を用意する場合 はプログラ ムロボ コンの プログラ ミングに十分時間 を費やす ことがで きる。 2)「 技術 とものづ くり」で ロボ ッ ト車 の製作 を行 い、 ロボ コンを行 う。そ して 「情報 とコン ピュー タ」で製作 した リモ コンロボッ トを改造 し、 プログラムロボ コンを行 う。 プログラムロボ コンを想定する場合、製作するロボッ トはある程度、構造 は複雑でな く、後 輪駆動 を選ぶ必要が ある。詳 しくは第 3章 の ロボ コンか らプログラムロボ コンヘ を参照。 3)「 情報 とコンピュー タ」必修 の時間でVBAを 用 いたブレゼ ンの作成、 プ レゼ ンのテーマ は 「情報 とコンピュ‐ 夕」 の範囲内 に限定す る。「情報 とコンピュー タ」 の選択の時間でVBAを 用 いたプロ グラムロボ コン学習 を展 開す る。VBAで 「情報 とコンピュー タ」必修 と選択両方 を行 う特色がある。必修での展開 は詳 しくは文献 12を 参照。 ロボ コンか らプログラムロボ コンヘ の授業展開す る場合、 ロボ コンの扱 いは通常行われてい るロボ コンより、 ロボ コン車 自体 に一定 の条件 を課せない とい けないので、通常展開され るよ うなロボ コンに比較 して、軽 い扱 い になる。 また ロボ コン とプログラムロボ コンは異学年 での とりあつかいになる場合 もある。 しか しなが ら、 どのような授業展開が望 ましいかは実際 に授業を実践 し、検討を加 え、吟味 して行 くことが必要であろ う。 4 プログラムロポ コンの授業実践 プログラムロボ コン授業実践 は静岡県函南町立函南中学校、静岡市立清水第二 中、静岡大学 4… 教育学部技術科で、現在進行 中である。 静岡大学教育学部技術科で は情報処理応用実習で学生22名 程 を対象 として行 った。 この科 目 亀山 寛・ 宮崎克久・ 野間翔太朗 の前半 は、VBを 用 いた発光 ダイオー ド点滅 シ ミュレー シ ョン、後半 をプロ グラムロボ コンの 授業 に充 てた。 ロボッ ト本体 は用意 し、VBAを 用 いた制御 プログラムの作成 の学習 を行 つた。 本研究 で作成 したテキス ト (第 5章 )を 使用 してい る。パ ソコン として学生が 自分 のノー トパ ソコンを教室に持参 した ものを使用 した。 プログラムロボ コンを卒業研究のテーマに してい る 学生が授業補助 に入って、効果的な役割を果た して い る。 2回 の授業 が終 えた段 階であ り、結 果 の報告を出すまでに至ってない。 3台 ほ どの ロボッ ト車本体 が機械的な衝撃 で壊 れ る トラブ ルが発生 してい るものの、受講学生 は一様 に熱心取 り組 んでお り、現在 までの ところ順調 に進 んで い るといえる。 静岡県函南町立函南中学校で行 っている、授業実践を簡単 に紹介す る。 3年 の選択技術で前 半 はロボ ッ ト車 の製作、後半 はプログラムロボ コンを行 っている。2005年 H月 9日 、「かかわ り合 い」 のテー マでの校 内研修 を行 つた。 グル ー プ毎 に模造紙 に走行 コース を考案 し、その コース を自動走行するようプログラムを組 む授業 を公開 した。生徒 は 自分 たちが考案 した走行 コース を自動走行す るように、熱心にプログラムを工夫 して いた。授業 としては途 中の過程で ある。 清水第二 中では、本年度、 3年 の 「情報 とコンピュー タ」 の必修 の授業 でVBAを 用 いたプ レゼ ンテーシ ョンの作成、選択 でVBAを 用 いて 「プロ グラムで制御す るロボッ トの学習」 に 取 り組 んだ。 これ らの実践 内容 は レポー ト化 されてい る。 が、 プログラムで制御す るロボッ トの学習の授業 は現在進行中である。 プログラムロボ コンのこれ らの授業 はいずれ も、現在進行中であるので、詳 しい報告 は本論 ではで きな く、 プログラムロボ コンの授業実践 とその分析 に関 しては課題 として残 された。 5 討論 最近 の情報技術 とソフ トウェアの進 歩 は、使用方法が より簡単 に、 よ り広範囲の情報 の処理 が可能 になってきてお り、複雑多岐 にわた る使用方法は易 しく扱 えるよ うに工夫されてい る。 その一方、そのハー ドウェアの実体や ソフ トウェアの しくみはますますブラックボックス化 し、 それ らの しくみは見えに くくなってい る。 この ような中で、情報教育 のあ り方 として、それ ら の使用方法を効率 よく教える とい うより、情報技術 の基本 と教 えてゆ く重要性 は増 してい る。 ソフ トウェアのブラックボックス化 が進行す る中で、ソフ トウェアの根本 とい えるべ き、現代 のプログラミング言語、生 きて使用 されてい る汎用言語 を体験す る重要性 は増 してい る。以上 の要請 に応 えるもの として、本研究 でVBAと USBを 用 いたプログラムロボ ッ ト教材 の開発 を 行 つた。VBAと USBを 用 いたプログラムロボッ ト教材 の特徴 として 1)現 代 のオ ブジェク ト指向言語教育を行 うことができる。 2)情 報技術 の基 本 の学習 にな る。汎用 プログラミング言語 に近 いVBAに よるプロ グラミン グは情報技術 の基本 とい える。 3)現 在 中学校 で普及 しつつ あるロボ コンをプログラム制御 ロボ コンに発展 させ ることがで き る。 4)VBAを 用 い るので、「情報 とコンピュー タ」 の必修分野 において、技術教育的展開② が容 易 になる。 5)現 在、高校 の普通教科 「情報」や さらに大学 の情報教育、 さらに就職後 の情報教育 と情報 エ クセルBASICと USBイ ンター フェース を用 いた プログラムロボ ッ ト教材 教育 の裾野 は大 き く広 が りつつあるが、VBAを 用 いた 「情報 とコンピュー タ」教育 はVB な どのプログラム教育 に生か され、将来 の発展性 が期待 で きる。 6)コ ンピュー タ と周辺機器 とを接続す るイ ンター フェー スの主流 となって きたUSBを 用 い てお り、 ロボ ッ ト制御 プロ グラム学習 に必要 な ときに何時 で もUSB接 続 で コンピュー タ と接続 を行 うことがで きるし、 この ような体験 を通 して、USB接 続 の長所 を学習で きる。 な どが挙げられ よう。 一 方本教材 の問題点 は、 ロボ ッ トとコンピュー タの間を接続す るのにUSBケ ー ブルが必要 な ことで あ る。 この欠点 の克服方 向 として、 1)無 線USB規 格 を用 い る、 2)USBで な く PICを 用 い る、の 2方 法が考 え られ る。無線USB規 格 は規格 自身が登場 したばか りで、教材 の 段階 までの開発 に数年 を待 つ必要がある。 ここではPICの 使用 について考察 を行 う。 現在 までにPICを 用 いたロボ ッ ト制御教材 の開発 は多 くなされて い る。PICを 用 いたロボッ トの最大 の長所 は コンピュー タとロボッ ト本体 が物理的に切 り離 して扱える点である (い わゆ る自律型 ロボッ ト)。 しか しなが ら、現実のPICを 用 いた ロボ ッ ト制御 の教材 は使用す るプロ グラミング言語 に大 きな問題 がある。PICの 場が 0、 C言 語 でプロ グラ ミングで きるケースが 多 いが、C言 語 は中学生には導入 が困難 である。アッセンブリ言語 も同様、普及 に困難 がつ き ま とう。 またBASICで PICの プロ グラミングも可能であるが、残念 なが らBASICと いって も、 MS‐ DOS時 代BASICに 近 く、VBや VBAに は載 らず、 この点 に中学 生の教育用 として、大 き ・ な弱点をもってい るといわぎるを得 ない。 PICを 用 いた ロボ ッ ト制御 に独 自の簡易制御言語 を開発す ることが多 く行われ、市販 されて い る。第 1章 に紹介 した ようにアイ コン言語 もしくは専用言語を用 い る場合である。アイ コン の組み合わせで ロボッ ト制御 を行 う行 き方 は、情報技術 の基本 と教えて ゆ く観点か ら、大 きな 疑間を持 たざるを得 ない。 コンピュー タに よる制御 を扱って い るが、 ソフ トウェアのブラック ボ ックス化 に抗す るよ り、迎合す る側面 が ある とい える。 また、 アイ コンの組み合わせで ロ ボ ット制御する授業 を情報教育 の研究 として行 うことに、情報技術教育 の積極性 を見 いだ しが たい。対象の ロボ ッ ト教材 を制御す ることしか使用できない専用言語を用 い る行 き方 も、現在 使用 されてい る汎用言語 の教育を敢 えて避 けてい る側面があるとい える。 中学生が対象 となるよ うなPICを 用 いた ロボ ッ ト制御 の教材開発 は多 くの人 々、会社 によっ て行われてきたが、現在市販 されてい るロボ ッ ト制御教材 に共通 して 1つ 欠けてい る点がある。 PICの 制御 プログラム を現在多 く用 い られて い るWindows上 の汎用 プロ グラミング言語 に組 み込んで、汎用 プログラミング言語 で制御 プログラムを組 む ようにする方式を採用 してない点 である。 この要因 として、情報技術 の基本 の教育 として、Windows上 の汎用 プログラ ミング 言語 に よる教育をほ とん ど重視 していないか、 もしくは情報技術 の基本 を教育す ることを重視 してないかのいずれであろ う。以上の理 由の他 に、独 自のプログラム方式 に よる付加価値 を付 け、収益増大を意図 したな どの市販上 の理 由も推定 され よ う。 PICを 用 いた自律型 ロボッ トの最大 の長所 は コンピュー タ とロボット本体 が物理的 に切 り離 して扱える点であるとしたが、教材 として考 えた場合、 ロボッ ト技術 の教材 とい う性格 が強 く な り、 コンピュー タ教育の性格が弱 くなることは否定 で きない。一方 ロボットとコンピュー タ の間 をUSBケ ー ブルで接続 した状態で プロ グラム開発 を行 う本研究 のプログラムロボッ トは、 汎用言語を用 いた情報教育 の性格 が強 く出せ るといえる。 A)と USBイ ン 以上 の よ うに考察 を踏 まえ る と、本研究 で 開発 したエ クセルBASIC(Ⅵ〕 亀山 寛 0宮 崎克久・ 野間翔太朗 ター フェース を用 いて、 ロボ ッ トをプログラム制御する教材 の開発 は非常 に価値 をもってい る といえる。 6 まとめ 本研究 でエ クセルBASIC(VBA)と USBイ ンター フェース を用 いて、 ロボ コン教具をプロ グラム制御す る教材 システムを開発 で きた。 プログラムロボ コン まで発展 させ ることができ、 かつ情報技術 の基本を教授で きる中学生用 の教材である。 ロボ コン用 に作成 したロボッ トをプ ロ グラムロボ コンに利用す るための留意点 1)ロ ボ ッ ト車 は後輪駆動型 で製作す る、 2)ロ ボッ ト車 に制御基盤を付加す る、 3)ロ ボッ ト車 にセンサー用 スイ ッチを 4個 付加する、 4) ロボッ ト車 に壁 はい用 の ロー ラを 2個 付加す るの 4点 を明 らかにした。「情報 とコンピュー タ」 で使用で きるプログラムロボ コンの授業テキス トを作成 した。 これはエ クセル ファイル 「生徒 xls」 の使用 を前提 とて記述 した。 また、 プログラムロボ コン用 のWebペ ージを作成 用車制御 。 し公 開 した。Webペ ー ジか らロボ ッ ト車 の壁 はい走行 な どの動画情報 な ども得 られ る。 プロ グラムロボ コン用 の授業展開の方法 も示 した。 以上の ことに よって、 ロボ コンか らプロ グラムロボ コンヘ の接続 した授業や、VBAを 用 い て 「情報 とコンピュー タ」 にお ける必修 と選択領域で統一 的 に技術教育的展開がで きる見通 し ができた。 プログラムロボ コン授業実践 は函南中学校、静岡大学教育学部技術科などで、現在 進行中であ り、授業実践 の報告 と分析 は課題 として残 された。なお、本研究 の遂行 の一部 に平 成 17年 度静岡大学教育学部活性支援経費 の支援 を受 けた。 参考文献 1)下 山大 :「 物作 りを通 してた くましく生 きる力 と、 自ら学び考 える創造性 を育む授業実践 一八戸三 中にお けるロボ コン トー ナメ ン トの歴史 と教育的効果 について一」 、 日本産業技 術教育学会誌、第39巻 第4号 、1997年 、pp.269‐ 272 2)鈴 木泰博 :「 技術科 にお けるロボ ットコンテス トの実践」、 日本産業技術教育学会誌、第40 巻第 1号 、 1998年 、pp.53-56 3)田 口浩継、山本利一 :「 第 4回 創造 ものづ くリフェア 「ロボッ トコンテス ト」 の実施報告」、 日本産業技術教育学会誌、第46巻 第 2号 、2004年 、pp.53‐ 58、 全国中学生創造ものブ くり 教育フェア :ロ ボットコンテス トは次のWebペ ージから知ることができる。 http:〃 aigika.nelp/fair/5/blog/archiVes/Cat robocon.htrnl 4)水 口大三 :「 私のロボコン授業・ 8年 間の記録」、技術教室、2000年 10月 号、pp.18‐ 25 5)堀 内祥行 :「「人」や 「もの」 とのかかわ りを深め、生活を工夫し創造する力を育てる授業 一高校、企業、地区中学校 との関わりを生かし、豊かな感性や想像力を育むロボットコン テス トの実践」 、静教組第54次 教育研究集会、2004年 、 この内容 は次のWebペ ージから知 ることカシできる。http://tarrliya.cottapan/rObOCOn/practice_0303/ 小澤慶晃 :「 競技用 ロボットの設計・製作 とロボットコンテス ト」 、静教組第54次 教育研究 集会、2004年 エ クセルBASICと USBイ ンター フェースを用 いたプログラムロボッ ト教材 6)亀 山寛 :「 プリンタイ ンター フェースを利用 した制御教具 の検討」、 日本産業技術教育学会 誌、第35巻 3号 、pp.185‐ 193、 1993年 7)亀 山寛、鷲野富哉 :「 ウィン ドウ環境 と情報基礎」、 日本産業技術教育学会誌、第41巻 第 2 号、pp.55-62、 1999年 8)教材開発 の会社名 は研究論文 である性格上、具体名を揚 げないこ ととし、代 わ りにAか ら E社 と呼ぶ こととす る。 9)例 えば 「USB拡 張店頭全 カタロ グ」、ASCII、 Vol.24、 2000年 2月 号、pp.159‐ 177に は300 種類前後 のUSB接 続 の製品が掲載 されてい る。 10)亀 山寛、戸塚雅彦 :「 USBイ ン ター フェース を備 えた制御教材 の開発」、 日本産業技術教 育学会誌、第45巻 第 3号 、pp.135-141、 2003年 H)http:〃 pcb209e.ed.shizuokaoac.ip/Robo/PrORobocon5.htm :「「情報 とコンピュー タ」教育 にお けるオブジェク ト再利用 プログラ ミ ング教育」、静岡大学教育学部附属教育実践 センター紀要第 H号 、pp.65-80、 2005年 13)岡 本敏雄、山際隆編集 :「 情報B」 、実教出版、2003年 12)亀 山寛、内山真路 14)http://homepage2.nifty.com/bake/USB001.htln WMV 15)http:〃 pcb209e.edoshizuoka.ac.jp/Robo/Robocon/前 輪駆動壁 はい。 16)http:〃pcb209e.ed.shizuoka.ac.jp/Robo/MO宙 e/MO宙 e5.htm 17)http:〃pcb209eoed.shizuoka.acjp/Robo/pText/VBAで ロボコン3.pdf 18)http://pcb209e.ed.shizuoka.acjp/Robo/1nSt/PRobolnst5。 htln 19)才 茂一幸 :「「人」や 「もの」 とのかかわ りを深め、生活を工夫 し創造する力を育てる授業 一 「情報 とコンピュータ」分野 におけるVisual Basic for Applicationを 利用 した技術教 、静教組第55次 教育研究集会、2005年 、なお本 レポー トは日教組第55次 教育研 育的展開」 究集会、2006年 、 2月 に発表 された。 20)後 閑哲也 :「 電子制御のためのPIC応 用ガイ ドブック」、技術評論社、2003年
© Copyright 2026 Paperzz