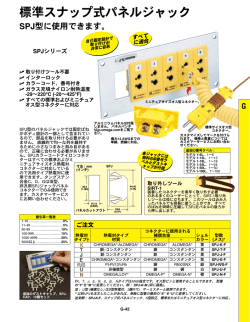
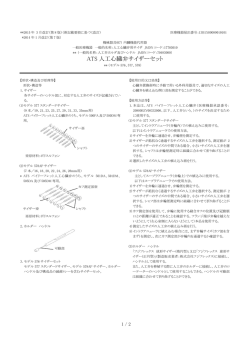
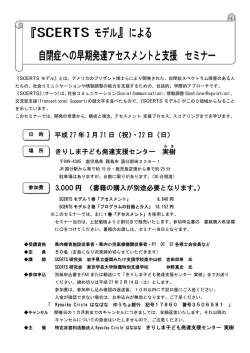
仮想ECU活用のためのユーザガイド策定 ~vECU-MBD WG活動事例紹介~ 仮想マイコン応用推進協議会 vECU-MBD WG 仮想HILS TF リ-ダー 日立オートモティブシステムズ㈱ 技術開発本部 宮崎 義弘 2014年1月24日 第14回カーエレクトロニクス研究会@福岡国際会議場 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 1 本日の発表内容 vECU-MBDワーキンググループの設立背景と活動概要 活動事例紹介:仮想ECU活用のためのユーザガイド策定 今後の活動計画 【略号】 ECU: Electronic Control Unit 電子制御ユニット vECU: Virtual ECU 仮想ECU MBD: Model Based Development モデルベース開発 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 2 vECU-MBDワーキンググループの 設立背景と活動概要 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 3 車載電装システム開発の置かれている状況 資料より引用 化 化 化 化 車の高機能化に向け電装制御システムは益々高度化・複雑化 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 4 MBD活用の進展 資料より引用 電装制御システム開発へのMBD適用が拡大中 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 5 MBDにおけるモデルとは? 資料より引用 仮想システムでのシミュレーションを可能とするもの All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 6 機能安全対応 JARI 自動車研究所 Webページより引用 2011年に自動車用機能安全規格ISO26262制定 → 検証カバレッジさらに向上 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 7 電子プラットフォーム化 アプリケーションソフトとプラットフォームソフト(基盤ソフト)が分離開発 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 8 今後のネットワークを介した複合システムテストの課題 実車テスト B-CAN HILS F-CAN 車一台分の大規模HILSテスト アプリソフト+プラットフォームソフト(基盤ソフト)+ネットワークのテストは 実ユニット完成後となり問題抽出の早期化が図れない All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 9 仮想マイコンと仮想ECU 仮想マイコン(マイコンモデル): Virtual Microcontroller 実装対象プロセッサのモデル。マイコン内蔵の周辺回路を含む。 OSなど基盤ソフトも含めて 製品と同一のオブジェクト コード(バイナリコード)をシ ミュレーション実行できる。 仮想ECU(バーチャルECU、ECUモデル): Virtual ECU 実装対象ECUのモデル。実装対象プロセッサのモデル(仮想マ イコン)を含む。 ECUモデル 制御対象モデル システム階層 入力モデル マイコンモデル 出力モデル エ ン ジ ン 回 転 数 ユニット階層 仮想ECU 実オブジェクトコード パーツ階層 A T ギ ア 仮想マイコン All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 10 仮想ECUの活用方法 現在のプロセス変化 目標プロセス 仕様書 + 実行可能な要求モデル 仕様書 要求側 供給側 要求側 部品 (ECU) 実行可能な部品モデル 仮想ECU 仕様書 + 実行可能な要求モデル 要求側 供給側 供給側 部品 (ECU) 最終確認時 部品 (ECU) 実行可能な部品モデルとしての活用 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 11 HILS と vHILS(Virtual HILS) 現在 HILS (Hardware-in-the-loop Simulator) ■構成: 実ECU+プラントモデル ■特長 -製品と同一のバイナリコードを動作検証 -実機ベースのソフトウェア検証 ■短所:場所制約、ターゲット環境切替工数、再 現性不確定、観測性制約、フォールト注入の制 約など HILS 車両モデル vHILS (Virtual HILS) ソフトウェア (バイナリコード) 01001010 01101011 11101010 01010111 ・・・・・・・・ HILS装置 目標 vHILS (Virtual HILS) ■構成: 仮想ECU+プラントモデル ■特長 -製品と同一のバイナリコードを動作検証 -実機ベースとほぼ等価なソフトウェア検証 -実機レス (実機不要、実機完成前でもテスト可) -場所制約、ターゲット環境切替工数、再現性 不確定、観測性制約、フォールト注入の 制約などの実機(HILS)の短所は解決 -クラウド活用による遠隔利用や並列実行可 プラントモデル コントローラモデル (仮想ECU) (車両モデル) ECU(実機) ソフトウェア (バイナリコード) マイコンモデル (仮想マイコン) Simulator All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG Co-sim 仮想ECU シミュレータ 第14回カーエレクトロニクス研究会 12 めざすべき目標イメージ 各設計プロセスの階層で仮想ECU活用 → V字開発プロセスの右側を短縮 要求設計 実車レス デバッグ&検証 システム要求モデル 短縮 実車検証 コード 要求側 仮想システム/仮想車一台分シミュレーション ECU要求モデル 仕様設計 量産 供給側 ECU内部要求モデル 単体実機レス デバッグ&検証 ソフトウエア詳細設計 単体実機 検証 コード 要求側 コード ソフトウエア要求モデル 短縮 仮想ECU/仮想HILS 供給側 コード 仮想マイコン 実装 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 13 モデル活用における障害 モデリング動作保証の壁 モデリング精度の壁 モデリングスキルの壁 ツール環境の壁 機密の壁 モデル カーメーカー・ECUメーカー・半導体メーカー・シミュレーションツール メーカーの領域を越えたモデル流通の仕組み構築が必要 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 14 国内協調活動のスタート グローバル競争で優位性を保つためにも 仮想マイコン活用への取組みを 自動車・ECU・半導体・開発ツールの 技術を縦断した活動が必要 仮想マイコン応用推進協議会/vECU-MBD WG vECU-MBD WG活動を2010年4月から 有志メンバーが集まり検討をスタート All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 15 vECU-MBDワーキンググループについて ● WGの目的 本WGは車のECUの開発と利活用の効率化を実現するための技術や開発 環境の構築に関する提案の作成を行うことを目的とする。 ● WGのメンバー WGは車の開発や利活用に関わる、自動車完成車メーカ、部品メーカー、半 導体メーカー、ツールメーカー、および、研究機関に所属する技術者や研究 者の有志により構成される。 【会員】 (株)本田技術研究所、マツダ(株)、日産自動車(株)、アイシン精機(株)、カルソニックカンセイ(株)、 (株)デンソー、 富士通テン(株)、(株)日立製作所、日立オートモティブシステムズ(株)、(株)日立アドバンストデジタル、日本 IBM(株)、オムロンオートモーティブエレクトロニクス(株)、ルネサスエレクトロニクス(株)、スパンション・イノベイツ (株)、(株)東芝、イータス(株)、日本シノプシス合同会社、ガイオ・テクノロジー(株)、 Australian Semiconductor Technology Company(株)、 TOOL(株)、(株)リンクポート、dSPACE Japan(株)、クオリアーク・テクノロジー・ソ リューションズ(株)、(一財)日本自動車研究所(JARI)、(株)半導体理工学研究センター(STARC)、(公財)九州先 端科学技術研究所(ISIT)(計26機関) 【順不同】(2013年12月) ● 活動歴 2010年4月~現在 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 16 活動のロードマップ ◆重要度、難易度を考慮し、3つのフェーズに分けた推進を計画し、2011年度からTF活動を開始 ◆フェーズ1(~2012年度): モデル流通のための啓蒙活動を推進(含む実証実験) フェーズ1 (2011年度~ 2012年度) フェーズ2 (2013年度~xx年度) 基礎技術構築 効率化のための環境構築 モデル流通TF 仮想HILS TF フェーズ3 (xx年度~yy年度) 大規模化、高可用性への対応 マイコンモデルTF モデル流通のための標準化と仕組み 業界標準化、モデル・ツール対応 —ユースケースのモデル開発 -フォールト注入 —開発プロセス、および、モデル運用 -複数ECU間インタフェースモデル ビジネスプロセスの定義 仮:クラウド対応、業界連携対応 -複数ECU連動 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 17 フェーズ1(~2012年度)の主な活動目的 • 仮想ECU*を主体とし、以下のユースケースに合ったモ デル活用の標準ガイドを作成することを活動目的に業 界啓蒙活動に役立てる • 機能安全対応と更なる効率アップ(設計段階と検証段 階での活用)を目指す – ソフト機能検証 – ソフトウエア性能評価 – 複数ECUの実機レス統合試験 – 故障注入・故障解析対応 *仮想ECUのコアとしては仮想マイコンを活用 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 18 これまでの主な活動成果 ◆主な活動成果 11年度 ・ユーザ事例集 <啓蒙> ・実証例題: JMAAB提供パワーウィンドウシステムを仮想マイコンと連携 12年度 ・ユーザ向け導入検討支援ガイド、用語集 <啓蒙&標準化> ・CAN I/F動作モデリング<標準化> ・実証例題: フォールト注入 ・周辺モデル付SILSの提案と試作評価 ◆情報発信 ・2012/5月: ISITカーエレ研究会 (成果発表) ・2012/11月: 一般公開HP ・2012/11月: ET2012xEDSF2012 パネルセッション ・2013/1月: 浅間テクノポリス地域センター向けセミナ ・2013/1月: カーエレクトロニクス高度人材育成セミナ ・2013/3月: 用語集 HP公開 ・2013/5月: ISITカーエレ研究会 (成果発表) ・2013/6月: ユーザ向け導入検討支援ガイド HP公開 ・2013/9月: IFAC-AAC2013 (成果発表) ・2013/9月: 一般公開HP(英語版) ・2013/12月: ユーザ向け導入検討支援ガイド英文版 HP公開 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG ◆公開成果物(例) 仮想ECU活用のための ユーザ向け 導入検討支援ガイド (1)目的 : 仮想ECUの導入・活用の検討において、 ユーザに役立つと思われる情報をガイドとして纏めた。 (2)目次 : ①仮想ECUシミュレータの導入・活用の狙い ②開発プロセス上の位置付け、③現状事例 ④時間精度について、⑤複数シミュレータの同期化 ⑥モデル間インタフェース、⑦ユーザインタフェース ⑧フォールト注入、⑨性能評価(CPU負荷率) ⑩周辺モデル設計における留意点 第14回カーエレクトロニクス研究会 19 実証例題(システム構築と実証) JMAAB提供パワーウィンドウシステムを仮想マイコンと連携 11年度 成果より 仮想マイコンツール: 以下の2種ツールで実証 • Synopsys社/CoMET-METeor • ガイオ・テクノロジー社/No.1システムシミュレータ All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 20 vECU-MBDワーキンググループホームページ ホームページURL http://www.vecu-mbd.org/ 英文版:http://www.vecu-mbd.org/en/ 活動内容や成果物は上記 URLから確認頂けます。 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 21 活動事例紹介: 仮想ECU活用のためのユーザガイド策定 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 22 ユーザガイドの概要 (1)名称: 仮想ECU活用のための ユーザ向け 導入検討支援ガイド User Support Guide to Consider Introduction of Virtual ECU (2)目的: 仮想ECUの導入・活用の検討において、ユーザに役立つと 思われる情報をガイドとして纏めた。 (3)目次: ①仮想ECUシミュレータの導入・活用の狙い ②開発プロセス上の位置付け ③現状事例 ④時間精度について ⑤複数シミュレータの同期化 ⑥モデル間インタフェース ⑦ユーザインタフェース ⑧フォールト注入 ⑨性能評価(CPU負荷率) ⑩周辺モデル設計における留意点 スライド表示形式で146ページ (Rev 1.0) (3)作成経緯: 2011年10月~2012年6月 ベースとなる現状事例などを調査および報告書作成 2012年7月~2013年2月 原稿作成および編集 2013年2月~2013年6月 レビューおよび改訂 (4)HP公開: 和文版: 2013年7月、 英文版: 2013年12月 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 23 用語の定義 業界の異なる関係者間で共通認識できるよう 用語の再定義または新たな定義を行った。 用語、略号 説明 ECU 電子制御ユニット MBD モデルベース開発手法。複雑化・高度化した現代の自動車制御システム開発に於て、MATLAB/Simulink等のツー ル活用によって、制御装置と制御対象の機能をモデル化し、それらを実行可能な仕様書として用いることで、製品 ライフサイクル全般に渡った品質向上と開発効率向上を目指した開発手法 MILS Model-in-the-loop simulation。モデルを用いたシミュレーション。Simulinkモデルなどで記述されたアプリケーション ソフトをシミュレーション実行できる。 SILS Software-in-the-loop simulation。ソースコードを用いたシミュレーション。C言語などで記述されたアプリケーション ソフトをシミュレーション実行できる。 仮想マイコンを利用したシミュレーション SPILS Simulated-processor-in-the-loop simulation。実装対象プロセッサのモデル(仮想マイコン)を用いたシミュレーショ ン。OSなど基盤ソフトも含めて製品と同一のオブジェクトコード(バイナリコード)をシミュレーション実行できる。 注1 PILS Processor-in-the-loop simulation。実装対象プロセッサ(マイコン)を用いたシミュレーション。 HILS Hardware-in-the-loop simulation。実装対象ECUを用いたシミュレーション。 仮想マイコン Virtual Microcontroller。実装対象プロセッサのモデル。マイコン内蔵の周辺回路を含む。OSなど基盤ソフトも含め て製品と同一のオブジェクトコード(バイナリコード)をシミュレーション実行できる。マイコンモデルとも呼ぶ。 仮想ECU 仮想HILS vHILS 注1 注1 Virtual ECU。実装対象ECUのモデル。実装対象プロセッサのモデル(仮想マイコン)を含む。OSなど基盤ソフトも 含めて製品と同一のオブジェクトコード(バイナリコード)をシミュレーション実行できる。バーチャルECU、vECU、 ECUモデルとも呼ぶ。 Virtual HILS。実装対象ECUのモデル(仮想ECU)を用いてHILSを仮想化したシミュレーション。 SPILSの応用例の1つである。HILSライクに利用できることが特徴である。バーチャルHILSとも呼ぶ。 注1: 別の用語も使われているが、本WGで審議の結果、この表に示すような用語を使用することにした。 注2: 上記用語および関連用語については、別資料「仮想ECUに関わる用語集」も編集し公開した。 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 24 用語の定義 SPILSと各シミュレーション形態の比較 シミュレー ション形態 制御ソフト (アプリソフト) 基盤ソフト マイコン スケジューラ、割り込み、 ドライバなど ECU (周辺回路含む) 制御対象(プラント) 車両、センサ、アク チュエータなど MILS モデル ツールの実行制御機能 で代行 なし なし モデル SILS ソースコード (実物を加工し Simullinkに変換) ツールの実行制御機能 で代行 なし なし モデル SPILS 実物(バイナリ) (オブジェクトコード) 実物(バイナリ) (オブジェクトコード) モデル モデル モデル 仮想マイコンを利用したシミュレーション PILS 実物(バイナリ) (オブジェクトコード) ツールの実行制御機能 で代行 実物 (ハードウェア) モデル モデル HILS 実物(バイナリ) (オブジェクトコード) 実物(バイナリ) (オブジェクトコード) 実物 (ハードウェア) 実物 (ハードウェア) モデル : ソフトウェア(モデル) All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG : 実物(ソフトウェア) : 実物(ハードウェア) 第14回カーエレクトロニクス研究会 25 仮想ECU応用モデルベース開発プロセス 実機の完成前に 、仮想ECUによる実機レスのシステムテストを行う場合の 開発プロセスを検討 オブジェクトコードと 車両テスト 各部品モデル(ハードウェアモデル)を 組込んで実機レスシステムテスト 自動車メーカー 要求分析 実機レス システムテスト システム設計 オブジェクト コード 部品モデル ドメイン毎に 担当範囲は変化 実機 要求分析 Validation 構成設計 サプライヤ システムテスト 結合検証 詳細設計 Validation 要求分析 要求分析 要求分析 テスト・検証 テスト・検証 テスト・検証 構成設計 構成設計 構成設計 単体検証 コーディング Validation Validation 詳細設計 詳細設計 詳細設計 モデリング モデリング モデリング 結合検証 結合検証 結合検証 単体検証 単体検証 単体検証 実装 実装 実装 ECUソフト ECUハード ・ センサ ・ アクチュエータ All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 26 仮想ECUの活用事例調査 ・自動車分野での現状の事例(ユースケース)を利用目的ごとに分類 ・6つの代表事例について、各社にて分担して自社事例を中心に調査 ・各事例ごとに利用目的、予想効果、必要要件などを整理 No. 事例(ユースケース)名称 調査担当 開発プロセス上の利用箇 所 主な利用目的 事例1 仮想車一台分シミュレーショ ン 本田技術研究所 複数ECUの統合試験 検証期間短縮 事例2 バーチャルHILS (vHILS) 日立 ソフト機能検証 検証期間短縮 事例3 CPU負荷計測 カルソニックカンセ イ ソフト性能評価 検証期間短縮 事例4 故障注入・故障解析 デンソー 故障注入・故障解析 検証カバレッジ向上 事例5 vECUによる網羅的検証 富士通テン ソフト機能検証 検証カバレッジ向上 事例6 ソフトウェア機能検証 アイシン精機 ソフト機能検証 検証カバレッジ向上 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 27 時間精度に関するトレードオフ 仮想ECUにおいては、時間精度について、要求と実現性とのトレードオフを考慮必要 要求: 時間精度 仮想ECUにおいて、プロセッサ演算処理時間(プロセッサクロックサイクル数)が実ECU と同一であれば、プロセッサの正確な挙動確認や性能評価ができる 実現性: 開発工数、開発費用、実行時間 仮想ECUにおいて、プロセッサ演算処理時間(プロセッサクロックサイクル数)を実ECU と同一にするには、プロセッサ内の高度な高速化処理方式を詳細に実装する必要があ る。開発工数・費用や納期の問題が発生する。またシミュレーション実行時間も遅くなる。 開発工数 開発費用 納期 時間精度 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 実行時間 時間精度 第14回カーエレクトロニクス研究会 28 時間精度の要求分析 各々の現状事例(ユースケース)において、時間精度について要求分析 →以下の課題が判明し、対応策策定 →ユーザガイドに反映 ①プロセッサ演算処理時間の時間精度に関するトレードオフを配慮すべきである。 しかし、プロセッサ命令実行の時間精度の完全性を追求する場合のシミュレータ 側の技術的困難性を、ユーザに理解いただけていないケースが散見される。 ⇒時間精度のトレードオフをユーザに理解いただくための説明資料の作成・提供 ②プロセッサ演算処理時間の時間精度は、ユースケースにより、高精度モデル (低速)と高速モデル(低精度)を使い分けることが必要。時間精度の分類につい て、車載制御システムのユーザにとっての共通的な定義が従来なかった。そのた め、ユーザとツールベンダとの間で認識合わせが困難という課題があった。 ⇒自動車制御分野向けのユースケースを念頭に、時間精度の分類定義、評価手 法策定 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 29 時間精度の分類定義(ATAL) シミュレーション時間精度の定義 ATAL (Automotive Timing Accuracy Level) シミュレータの実行時間の精度を分類するためのレベル 車載制御システムのシミュレーション用途の視点で分類 以下の3レベルを定義 (ATAL-1~3) 主な用途 レベル 定義および説明 備考:トレードオフ ソフト 機能検証 ソフト 性能評価 ATAL-3 誤差5%以内。バス調停やパイプライン制御をモデ ル化することでプロセッサクロックサイクル数をあ る程度厳密に模擬。 ○ ○ ATAL-2 誤差15%以内。各命令毎、アクセス先毎、平均実行 サイクル数設定等によりプロセッサクロックサイク ル数をラフに推定して模擬。 ○ ○ ATAL-1 誤差最大値保証せず。全命令一律に1プロセッサ クロックサイクル等で模擬。時間指定されたタイマ 割込みやイベント発生のタイミングは保証するが、 プロセッサ命令実行時間精度は保証しない。 ○ × All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 時間 精度 開発工数 開発費用 実行時間 高 大 長 低 小 短 第14回カーエレクトロニクス研究会 30 時間精度の分類定義(ATAL) 【補足】 TLM(SystemC TLM-2.0)で規定されるシミュレーション時間精度の分類定義との関連 TLM(SystemC TLM-2.0)で規定される シミュレーション時間精度の分類定義 車載制御用途での時間精度の分類定義 レベル 定義および説明 レベル 定義および説明 ATAL-3 誤差5%以内。バス調停やパイプライン 制御をモデル化することでプロセッサク ロックサイクル数をある程度厳密に模 擬。 AT Approximately-timed 別名、cycle-accurate マイコン内部アーキテクチャの性能調査 に十分な精度 ATAL-2 誤差15%以内。各命令毎、アクセス先毎 、平均実行サイクル数設定等によりプ ロセッサクロックサイクル数をラフに推 定して模擬。 LT ATAL-1 誤差最大値保証せず。全命令一律に1 プロセッサクロックサイクル等で模擬。 時間指定されたタイマ割込みやイベント 発生のタイミングは保証するが、プロセ ッサ命令実行時間精度は保証しない。 Loosely-timed O/S起動とマルチコアシステム実行の ための十分なタイミング精度 各トランザクションは開始と終了の2つ のタイミング・ポイントを持つ ・ATとATAL-3とは、同等の精度 ・LTは、ATAL-2とATAL-1との間の精度 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 31 プラントモデルとコントローラモデルの同期化 ◆プラントモデルとコントローラモデルの協調シミュレーションの構成 ECU1台の場合における、プラントモデルとコントローラモデルの協調シミュレーションの構成と同期化 Simulink 仮想ECUシミュレータ プラントモデル Simulink プラントモデル コントローラモデル(ECUモデル) マイコンモデル サンプ リング サンプ リング ポート ポート サンプ リング サンプ リング サンプ リング サンプ リング ポート ポート サンプ リング サンプ リング サンプ リング サンプ リング ADC サンプ リング サンプ リング タイマ タイマ サンプ リング サンプ リング 連成するツール間のデータの受け渡しで、適切なサンプリング時間を指定要 連成するツール間のデータの受け渡しで、固定したサンプリング時間を使用 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 32 プラントモデルとコントローラモデルの同期化 ◆同期化周期とシミュレーション実行速度 (トレードオフ) ECUモデルとプラントモデルの同期化周期についても、以下を考慮要 ・同期化周期: 短いほど、タイミング精度は上がるが、シミュレーション実行速度は下がる 長いほど、タイミング精度は下がるが、シミュレーション実行速度は上がる ・当該インタフェースごとに、必要とされるタイミング精度を検討し、適切な同期化周期 を定めることが望ましい。 ・協調シミュレーション同期マスタスケジューラは、その周期設定機能およびチューニ ング機能を持つことが望ましい。 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 33 プラントモデルとコントローラモデルの同期化 ◆同期化周期とシミュレーション実行速度 (トレードオフ) 評価事例 同期化周期を変えて、シミュレーション実行時間を比較 この試行事例の場合の評価結果 ・同期化周期を10μ sに短くするとシミュレーション実行速度が低下する ・どうしても10μ sが必要なインタフェースを除いて、他のインタフェースは100μ s以上の同期化周 期とすることが望ましい 同期化周期とシミュレーション実行速度の評価例 備考: (1)MILSは、ECUモデル、プラントモデル共 に、1ノードのプロセッサコアで実行した場合 を示す。 SPILSは、2ノードのプロセッサコアを用いて、 1台でECUモデルを、もう1台でプラントモデ ルを実行した場合を示す。 (2)この評価事例は、あくまでも1つの試行 事例であり、モデルの規模や構成、利用する シミュレータ環境やPCの環境によって、評価 結果は相違する。 3 シ ミ ュ レ ー2 シ ョ ン 実 行 時1 間 比 0 N/A MILS 10ms 1ms 100us 10us ←同期化周期 SPILS All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 34 今後の活動計画 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 35 活動のロードマップ ◆2013年度~: モデル流通TFは当初の目標をほぼ達成したので終了 ⇒ 仮想HILS TFを開始 フェーズ1 (2011年度~ 2012年度) フェーズ2 (2013年度~xx年度) 基礎技術構築 効率化のための環境構築 モデル流通TF 仮想HILS TF フェーズ3 (xx年度~yy年度) 大規模化、高可用性への対応 マイコンモデルTF モデル流通のための標準化と仕組み 業界標準化、モデル・ツール対応 —ユースケースのモデル開発 -フォールト注入 —開発プロセス、および、モデル運用 -複数ECU間インタフェースモデル ビジネスプロセスの定義 仮:クラウド対応、業界連携対応 -複数ECU連動 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 36 活動体制 フェーズ1(~2012年度) vECU-MBD WG 代表: ISIT 村上(九州大学) 事務局: ISIT/STARC 開催頻度: 3か月/回 モデル流通 TF リーダー: 本田技術研究所 嶋田 サブリーダー: 日立オートモティブシステムズ 宮崎 事務局: ISIT 開催頻度: 1か月/回 フェーズ2(2013年度~) vECU-MBD WG 代表: ISIT 村上(九州大学) 事務局: ISIT/STARC 開催頻度: 3か月/回 仮想HILS TF リーダー: 日立オートモティブシステムズ 宮崎 サブリーダー: デンソー 阿部 事務局: ISIT 開催頻度: 1か月/回 マイコンモデルTF マイコンモデルTF リーダー: 富士通セミコンダクタ 吉野 サブリーダー: 日本IBM 小松 ルネサスエレクトロニクス 岡崎 事務局: STARC 開催頻度: 1か月/回 リーダー: スパンション・イノベイツ 吉野 サブリーダー: 日本IBM 小松 ルネサスエレクトロニクス 岡崎 事務局: STARC 開催頻度: 1か月/回 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 37 仮想HILS TFの目的 ◆背景 ~12年度: 啓蒙活動が主 13年度~: 業界標準化、モデル・ツール対応に活動の軸足を移動 ◆目的 (1)「仮想車一台分シミュレーション」の実現容易化のための標準化と実証 自動車メーカでのユースケース: 仮想車一台分シミュレーション 複数ECU間インタフェースモデルの標準化 →複数ベンダのECUの組み合わせを容易化 12年度から検討してきたCANバスモデルを活用 (2)「仮想フォールト注入テスト」の実現容易化のための標準化および実証 マイコンモデルおよび周辺モデルへのフォールト注入テストの実証 フォールト注入の要求仕様標準化(注1) 注1:仮想フォールト注入テストの場合、従来の実機ベースでは限定されていたフォールトモードやタイミング、周囲条件 などが自在に作れるため、テストカバレッジをどこまで考慮するかという課題がある。その課題解決のために、 フォールト注入の要求仕様標準化に取り組む。 ◆主な活動テーマ (1)複数ECU間インタフェースモデル および 複数ECU連動 (2)フォールト注入 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 38 複数ECU連動: 仮想車一台分シミュレーションの実現 従来方式 Full Vehicle HILS コントローラは実機 新方式 Full Vehicle Off-Line simulation コントローラも含め全て仮想化 HILS B-CAN F-CAN Actual Object Code Actual Object Code Actual Object Code Actual Object Code Vehicle I/F Virtual MCU I/F Virtual MCU I/F Virtual MCU B-CAN F-CAN All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG I/F Virtual MCU Operation Pattern Environment 第14回カーエレクトロニクス研究会 39 フォールト注入:これまでの活動成果と今後の計画 実証例題(仮想マイコン連携パワーウィンドウシステム)上でフォールト注入 今後の計画 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 12年度 成果 第14回カーエレクトロニクス研究会 40 まとめ ◆vECU-MBDワーキンググループ ・仮想ECU活用の目的 → V字開発プロセスの右側を短縮 ・自動車完成車メーカ、部品メーカー、半導体メーカー、ツール メーカー、および、研究機関の技術を縦断した国内協調活動 ⇒仮想ECUの活用拡大を図る ◆活動事例紹介:仮想ECU活用のためのユーザガイド策定 ・現状事例、時間精度、複数シミュレータの同期化、ほか ・和文版、英文版ともにHP公開 ◆今後の活動計画 ・複数ECU連動 ・フォールト注入 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 41 ご清聴ありがとうございました。 All Rights Reserved by 仮想マイコン応用推進協議会/vECU-MBD WG 第14回カーエレクトロニクス研究会 42
© Copyright 2026 Paperzz