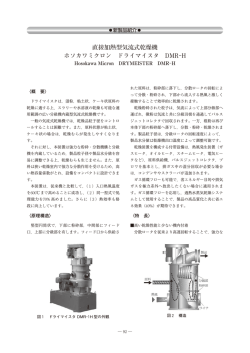
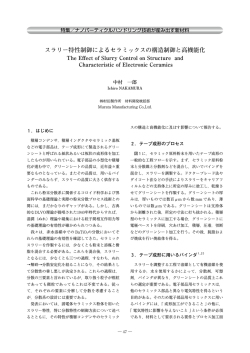
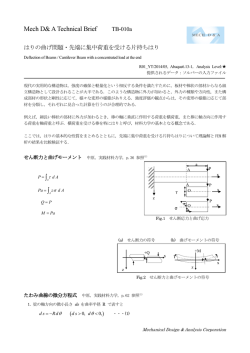
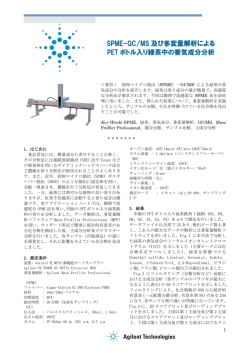
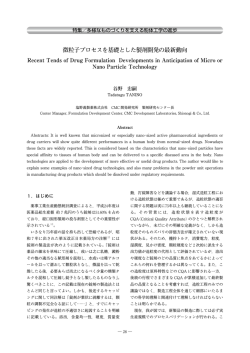
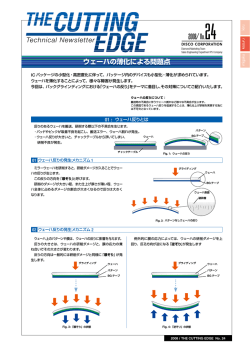
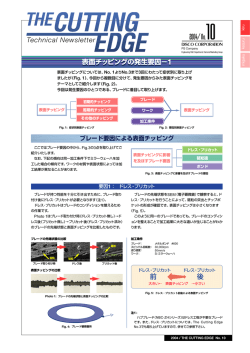
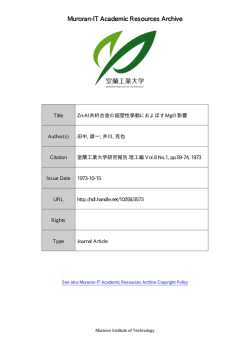
不完全微分を用いた単相 PWM インバータの インピーダンス電圧補償と電圧振動抑制制御 正員 中田 篤史* 非会員 藤永 真希** 上級会員 鳥井 昭宏*** 終身会員 明照*** 植田 An Impedance Voltage Compensation and Voltage Vibration Suppression Control by Using Inexact Differential in a Single-phase PWM Inverter Atsushi Nakata*, Member, Maki Fujinaga**, Non-Member, Akihiro Torii***, Senior Member , Akiteru Ueda***, Life Member キーワード:単相 PWM インバータ,不完全微分 Keywords:single-phase PWM inverter, inexact differential 1. 相差は-0.21[deg]であり,ほぼ指令値通りの出力が得られ, まえがき 共振周波数でのゲインを-5.89[dB]とすることが可能である。 近年,エンジン発電機,車載用 100V 電源として高周波ス イッチングの単相 PWM インバータが広く用いられるよう になってきており,様々な負荷が接続されることが予想さ れる。インバータには線形である抵抗負荷,遅れ負荷や進 み負荷だけでなく,非線形負荷であるコンデンサインプッ ト型整流器が接続される場合がある(1) (2)が,そのときのフィ ルタ L によるインピーダンス電圧の補償は検討されていな (a) Inverter main circuits. い。また,LC フィルタの共振点での電圧振動が問題となっ ている(3)。本論文では単相 PWM インバータにコンデンサイ ンプット型整流器を接続した場合のインピーダンス電圧補 償及び出力電圧からコンデンサ電流を推定した電圧振動抑 制制御を提案する。また,補償しきれない部分をフィード バック制御し,これらのシミュレーション結果を報告する。 2. (b) Block diagram of main circuits and feedforward control. Fig.1. Configuration of main circuit and feedforward control. 回路構成と制御定数の設計 Table 1. Parameters. Fig.1(a)に主回路構成,Fig.1(b)に主回路とフィードフォワ ード部のブロック線図を示す。非線形な負荷電流 Io が流れ ると,フィルタ Lf には電流の微分に相当する VL 電圧が発生 し,出力電圧 Vo がひずむ原因となる。また,LC フィルタの 共振周波数で出力電圧 Vo に振動成分が生じることが良く知 ................. (1) られており,ダンピング抵抗を Cf と直列に挿入したり,Cf に流れる電流をセンサで取り込んで振動抑制制御が行われ ただし (3) ている 。本論文では Iinv 電流と出力電圧 Vo をセンサで取り 込み,Fig.1(b)に示すように不完全微分を用いて VL*と Ic*を 推定し,インピーダンス電圧補償と電圧振動抑制制御を行 う。 Fig.1(b)のブロック線図の伝達関数を(1)式に示す。また, 回路定数および制御定数を Table.1 に示す。Fig.1(b)における KC を 0 から 20 まで変化させたときの LC 共振周波数 Fig.2. Damping gain at 1549Hz. (1549Hz)でのゲインを Fig.2 に示す。共振周波数でのゲイン をほぼ半減(-6dB 程度)とするため,KC を 11.5 としてボード 線図を描くと Fig.3 となる。60Hz のゲインは-0.146[dB],位 * 静岡理工科大学 〒437-8555 袋井市豊沢 2200-2 ** ASTI 株式会社 〒432-8056 浜松市南区米津町 2804 番地 *** 愛知工業大学 〒470-0392 豊田市八草町八千草 1247 Fig.3. Bode diagram of Eq.(1). 次にフィードバック制御定数について検討を行う。フィ 4. まとめ ードフォワード制御では不完全微分を用いたため,誤差が 単相 PWM インバータにコンデンサインプット型整流器 生じる。これらを補償するため,フィードバック制御を用 を接続した場合のデッドタイム電圧,インピーダンス電圧 いてひずみ電圧補償を行う。Fig.4 にフィードバック制御の 補償をフィードフォワード制御で行い,不完全微分を用い ブロック線図を示す。一般的にインバータの出力電圧ひず た電圧振動抑制制御を用い,補償しきれない部分をフィー み率の測定は 40 次までであるので, 制御対象の周波数範囲, ドバック制御した結果を示した。また,フィードフォワー つまり,開ループ伝達関数 0[dB]での周波数を 2.4kHz とす ド制御とフィードバック制御の設計法を示し,設計手順を る。2.4kHz の位相余裕を調整するために D 制御を,ゲイン 述べた。設計した結果をシミュレーションで検討した結果, を調整するために P 制御を用いている。また,出力電圧 Vo 出力電圧から推定した電圧振動抑制制御が効果的であるこ に含まれるリプル成分を減じて D 制御を可能とするために とを明らかにした。インピーダンス電圧補償とデッドタイ 時定数が T である 1 次遅れを用いている。1 次遅れの時定数 ム電圧補償をフィードフォワード制御することで,4.31%の は 2.4kHz の 1/20 のカットオフ周波数 120Hz(T=1.32[ms])と し た 。 位 相 余 裕 は 2.4kHz で +40[deg] と す る た め に , THD まで低減することを示した。また,補償しきれないひ ずみをフィードバック制御と組み合わせることで,THD を TD=86.5[µs]とした。またゲイン P は 2.4kHz で 0[dB]とする 0.72%まで抑制できることを示した。 ために,P=37 とした。この時の開ループ伝達関数のボード 線図を Fig.5 に示す。 Fig.4. Block diagram of feedback control. Fig.6. Block diagram for gate signals. Table 2. Simulation parameters. Fig.5. Bode diagram of open-loop transfer function. 3. シミュレーション インバータ出力電圧を 100Vrms とするために,指令値 Vref* は振幅 141.4,周波数 60Hz の正弦波とする。Fig.6 にシミュ レーションのブロック線図を示し, シミュレーション定数 は Table.1,2 の値を用いた。主回路及び負荷は Fig.1(a)を用い Fig.7. Output voltage and current waveforms る。Fig.6 にゲート信号作成のためのブロック線図を示す。 in the case of feedforward control. これはフィードバックとフィードフォワードを含む全体の 制御回路を示しており,実際の回路ではデッドタイム電圧 が生じるため,電流極性に応じたパルスを加えてデッドタ イム電圧補償を行っている(4)。デッドタイム電圧補償ではリ プル電流による誤動作を防止するために,時定数 19.9µs の 1 次遅れでフィルタリングした後,±3A 相当のデッドバン ドを設けた。 Fig.8. Output voltage and current waveforms Fig.7 にフィードフォワード制御のみの電圧電流波形 in the case of feedforward and feedback control. (P=0),Fig.8 にフィードフォワード制御とフィードバック制 文 御を組み合わせた場合のシミュレーション波形を示す。フ (1) ィードフォワード制御のみではひずみ率 THD(40 次以下で 算出)が 4.31%と大きいが,フィードバック制御を組み合わ (2) せた場合は THD が 0.72%とほぼ正弦波の出力電圧とするこ とができた。 (3) (4) 献 石川,河村: 「DSP による実時間出力波形合成形三相 PWM インバー タ」,電気学会論文誌 D,Vol.110,No.6,pp.627-636(1990-6) 坂根,劉,邢,黄,平地:「新しいデッドビート制御のミニ UPS イ ンバータへの適用」,GS ユアサテクニカルレポート,Vol.3,No.1, pp.48-53(2006-7) 田中,和田,赤木: 「直列形アクティブフィルタの出力電圧振動とそ の抑制」,電気学会論文誌 D,Vol.117, No.6,pp.680-687 (1997-6) 中田,鳥井,植田: 「単相 PWM インバータのデッドタイム電圧補償」, 電気学会産業応用部門大会,1-72,(2013-8)
© Copyright 2026 Paperzz