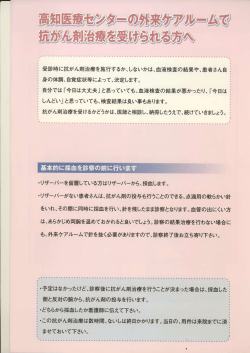
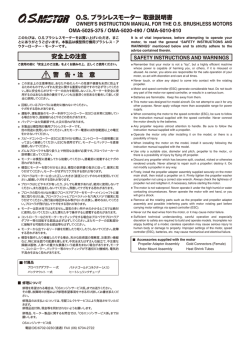
リニアモータアクチュエータ 最高速度:5m/s 加減速度:9G 定評あるRDM形のミニチュア形 RDM-mini TOKYO. JAPAN CATALOG No.323-2 Linear Motor Actuater リニアモータアクチュエータ の構造 スライダ マグネットロッド シールドフラットケーブル フォーサ リードヘッド ボールリテーナ入り ボールリテーナ入りLM ボールリテーナ入りLMガイド LMガイド ガイド SHW形 SHW の特長 1. 高速・高加減速 最高速度:5m/s、加減速度:9G RDM‐miniはコアレスリニアモータの採用、スライダの軽量化、および樹脂材料の採用によ り渦電流損の発生を抑える構造とし、最高速度5m/s 、加減速度9Gを実現。 6 3 4 速度[m/s] 速度[m/s] 5m/s 2 1.34m/s 1 0 0.2 0.3 0.4 RDM1104※ 速度線図(最高速度) ※無負荷時 1 9.1G 0.015s 0 0.1 2 0.5 0.6 時間[s] 0.2 0.25 0.3 0.35 RDM1104※ 速度線図(加減速度) ※無負荷時 0.4 時間[s] Linear Motor Actuater 2. 軽量・コンパクト 本体質量:900g∼ RDM‐miniは小形のリニアモータ、 リニアエンコーダおよびボールリテーナ入りLMガイド (SHW12)を使用。動力ケーブル、信号ケーブルにはシールドフラットケーブルを採用す ることによりケーブルの取り回しも含めた取付け占有面積が小さいリニアモータアクチュエー タです。 51 アルミカバー アルミテーブル 58 シールド フラットケーブル アルミベース 67 3. 低速度リップル ボ−ルリテ−ナ入りLMガイド SHW形 優れた等速性 RDM‐miniはコアレスリニアモータを使用しています。マグネットの周囲をコイルが取り巻 くロッド形状のため、電気的ギャップの変動が少なく、駆動時の推力変動が極めて少ないモー タです。 さらに、転がり抵抗の変動が少ないボールリテーナ入りLMガイドを使用することにより、低速 度リップルを実現しました。 10.5 10.4 10.3 速度[mm/s] 10.2 10.1 10 9.9 ±0.84% 9.8 9.7 [評価データ測定条件] レーザ測長器ML10【RENISHAW製】使用 コントローラ最小指令単位 :1μm 速度測定サンプリング周波数 :100Hz 駆動速度:10 mm/s,負荷質量:2.8 kg 9.6 9.5 5 15 25 35 45 RDM1108 速度リップル評価データ(参考) 55 時間[s] 2 呼び形番の構成 1. 本体 RDM1102−H−868L−A−JN−N−N−A−D03−E01−S02 1 2 3 4 RDM モータ形番 1 5 6 7 8 9 10 11 RDM1102(最大推力:19.8N ) RDM1104(最大推力:39.4N ) RDM1106(最大推力:50.4N ) RDM1108(最大推力:59.7N ) ※数字はリニアモータのサイズを表します。 上2桁:スラストロッドサイズ、下2桁:フォーササイズ 2 ユニットタイプ 3 ユニット全長 4 5 カバー A:アルミ押出しカバー付き E:特殊 リニアエンコーダ JN:光学式リニアエンコーダ E:特殊 センサ N:センサなし S:近接センサ【(株)山武製:APM‐ D3A1 3個付属】 E:特殊 取付け用部品 N:なし E:特殊 取付け姿勢 A:水平 B:壁掛け(リニアエンコーダ上側) C:逆さ (天吊り) D:壁掛け(リニアエンコーダ下側) E:特殊 動力ケーブル D03:ケーブル長さ 3m D05:ケーブル長さ 5m D10:ケーブル長さ 10m 8 9 10 エンコーダケーブル E01 ケーブル長さ 1m ※ケーブル長さは1mのみです。 シリアルケーブル 11 152L 254L 356L 459L 561L 664L 766L 868L ※単位はmm です。 6 7 モータ形番別に専用のシリアル変換モジュール(SCM )が 本体に付属してあります。他の形式との互換性はありません。 S02 S04 S09 ケーブル長さ 2m ケーブル長さ 4m ケーブル長さ 9m 注1)動力フラットケーブル、 エンコーダフラットケーブルは長さ1.2mのもの(コネクタ付き)がユニット側に付属してあります。 注2)動力ケーブル、 エンコーダケーブル、及びシリアルケーブルは固定配線用となっています。可動部配線用をご希望の場合は、 THKまでご相談ください。 3 Linear Motor Actuater 2. ドライバ 【㈱安川電機製】 SGDH−01BEY364−N 1 高速パルス入力基板 1 N:高速パルス入力基板無し H:高速パルス入力基板有り ※入出力信号コネクタはドライバに付属してあります。 高速パルス入力基板付きの場合は、高速パルス入力信号コネクタも付属してあります。 3. パソコン通信用オプション 通信用ソフト 【㈱安川電機製】 SigmaWin−Plus ※SGDHのみ対応 通信用ケーブル JZSP−CMS** 1 接続コネクタ種類 1 4. 単品ケーブル 動力ケーブル 01:2m D−SUB25ピン 02:2m D−SUB9ピン 03:2m ハーフピッチ14ピン ※メンテナンス用に「動力ケーブル」、 「エンコーダケーブル」、 「シリアルケーブル」を単品で ご購入いただく場合には以下の形番をご指定ください。本体ユニットをご購入された場合には 以下のケーブル単品の形式指定は必要ありません。 RMKHD−** 1 1 ケーブル長さ 03 3m 05 5m 10 10m ※固定配線用です。可動部配線用をご希望の場合は、THKまでご相談ください。 エンコーダケーブル ※ケーブル長さは1mのみです。 ※固定配線用です。可動部配線用をご希望の場合は、THKまでご相談ください。 RMKHE−01 シリアルケーブル JZSP−CLP20−** 1 1 2 2 ケーブル種類 ケーブル長さ 20:固定配線用 70:可動部配線用 02 2m 04 4m 09 9m 動力FFCケーブル RMKFD−01 ※ケーブル長さは1.2mです。(ケーブルのみ。コネクタ無し。) ※交換作業につきましては、専用の作業手順が必要となりますので、 THKまでご相談ください。 エンコーダFFCケーブル RMKFE−01 ※ケーブル長さは1.2mです。(ケーブルのみ。コネクタ無し。) ※交換作業につきましては、専用の作業手順が必要となりますので、 THKまでご相談ください。 4 システム構成 リニアモータアクチュエータRDM-mini形 エンコーダFFCケーブル (本体に付属) (RMKFE-01) ドライバ(高速パルス入力基板なし) ※高速パルス入力基板はオプション で付属可能 動力FFCケーブル(本体に付属) (RMKFD-01) 動力ケーブル (RMKHD-**) CN2へ パルス列コントロ−ラ シリアルケーブル (JZSP-CLP20-**) シリアル変換モジュール エンコーダケーブル (RMKHE-01) 5 主電源、制御電源(単相AC100V) Linear Motor Actuater 仕様 ● 基本仕様 仕様 項目 形番 RDM1102 RDM1104 RDM1106 RDM1108 最大推力(N) 19.8 39.4 50.4 59.7 連続定格推力(N) 2.7 4.7 6.0 8.0 JZDP-D008-138 JZDP-D008-137 5.0 最高速度(m/s) 最小分解能(μm) 0.078 繰り返し位置決め精度(μm) ±0.5 単相AC100V/100W ドライバ入力電源/容量 単相AC100V ドライバ制御電源 シリアル変換モジュール形式 JZDP-D008-140 JZDP-D008-139 KitL-121CAC リニアエンコーダ形式 ※1(Vrms/m/s) 逆起電力定数(相) 1.0 2.0 3.0 4.0 最大電流(Arms) 7.1 6.8 5.9 5.2 連続定格電流(Arms) 1.3 1.0 0.9 0.8 スライダ質量(kg) 0.23 0.32 0.42 0.52 注)基本仕様は、周囲環境温度20°C、電機子巻線平均温度が100°Cの値です。 ※1 公差±10% ● 推力・速度特性 RDM1104 □最大推力 ■連続定格推力 60 30 45 推力 (N) 推力 (N) RDM1102 40 19.8N 20 □最大推力 ■連続定格推力 39.4N 32.6N 30 13.1N 15 10 2.7N 4.7N 3.7N 1.0 2.0 3.0 速度 (m/s) RDM1106 4.0 3.6m/s 0 5.0 推力 (N) 60 1.0 3.0 2.0 速度 (m/s) RDM1108 □最大推力 ■連続定格推力 80 4.0 5.0 □最大推力 ■連続定格推力 100 80 50.4N 59.7N 44.9N 40 推力 (N) 0 56.6N (3m/s) 60 40 20 20 6.0N 0 1.0 10.1N 2.0 3.0 速度 (m/s) 4.0 5.0 0 37.5N 14.9N 8.0N 1.0 2.0 3.0 速度 (m/s) 4.0 5.0 注1)推力−速度特性は電機子巻線平均温 度が100°Cの値です。 注2)推力−速度特性はLMガイド(RDMmini標準グリース封入)の摺動抵抗を 考慮した値です。 6 ● 基本寸法および質量 RDM1102 58 51 45 67 E矢視 B A×N B 2×(N+1)-3. 4キリ通シφ6. 5ザグリ深サ3. 5 28 A LT 2 4- M3通シ PLラベル貼付け位置 LST 70 (リファレンスマーク検出位置) 11 28 20 8 10 E LU 5 51 11. 31 C 15 近接センサ付き スライダ長さ LT[mm] スライダ部 タップ穴数[個] ドグ取付け位置 C[mm] スライダ質量 [kg] 50 4 17.5 0.23 ユニット全長 LU[mm] ストローク LST[mm] ベース固定用 タップ穴ピッチ寸法 A[mm] 152 41 90 254 143 356 リファレンスマーク 検出位置 [mm] N [個] B [mm] 4 1 13 0.9 96 6 2 13 1.2 245 96 8 3 16 1.5 459 348 100 10 4 11.5 561 435 100 12 5 12.5 2.1 664 538 100 14 6 14 2.4 766 640 100 16 7 15 2.7 868 742 100 18 8 16 3.0 注)本体質量にはスライダ1個分の質量を含みます。 7 ベース固定用 取付け穴数 2×(N +1)[個] 70 本体質量 [kg] 1.8 Linear Motor Actuater RDM1104 58 51 45 67 E矢視 B A×N B 2×(N+1)-3. 4キリ通シφ6. 5ザグリ深サ3. 5 28 A 2 LT PLラベル貼付け位置 LST 96 (リファレンスマーク検出位置) 6-M3通シ 10 28 28 20 8 10 E LU 5 51 11. 31 C 15 近接センサ付き スライダ長さ LT[mm] スライダ部 タップ穴数[個] ドグ取付け位置 C[mm] スライダ質量 [kg] 76 6 30.5 0.32 ユニット全長 LU[mm] ストローク LST[mm] ベース固定用 タップ穴ピッチ寸法 A[mm] 254 132 96 356 234 459 ベース固定用 取付け穴数 2×(N +1)[個] リファレンスマーク 検出位置 [mm] N [個] B [mm] 6 2 13 1.3 96 8 3 16 1.6 337 100 10 4 11.5 1.9 561 439 100 12 5 12.5 664 542 100 14 6 14 2.5 766 644 100 16 7 15 2.8 868 746 100 18 8 16 3.1 96 本体質量 [kg] 2.2 注)本体質量にはスライダ1個分の質量を含みます。 8 ● 基本寸法および質量 RDM1106 58 51 45 67 E矢視 B A×N B 2×(N+1)-3. 4キリ通シφ6. 5ザグリ深サ3. 5 28 A 2 PLラベル貼付け位置 LST LT 121 (リファレンスマーク検出位置) 8-M3通シ 8. 5 28 28 28 20 8 10 E LU 5 51 11. 31 C 15 近接センサ付き スライダ長さ LT[mm] スライダ部 タップ穴数[個] ドグ取付け位置 C[mm] スライダ質量 [kg] 101 8 43 0.42 ユニット全長 LU[mm] ストローク LST[mm] ベース固定用 タップ穴ピッチ寸法 A[mm] 254 113 96 356 215 459 リファレンスマーク 検出位置 [mm] N [個] B [mm] 6 2 13 1.4 96 8 3 16 1.7 318 100 10 4 11.5 2.0 561 420 100 12 5 12.5 664 523 100 14 6 14 2.6 766 625 100 16 7 15 2.9 868 727 100 18 8 16 3.2 注)本体質量にはスライダ1個分の質量を含みます。 9 ベース固定用 取付け穴数 2×(N +1)[個] 121 本体質量 [kg] 2.3 Linear Motor Actuater RDM1108 58 51 45 67 E矢視 B A×N B 2×(N+1)-3.4キリ通シφ6.5ザグリ深サ3.5 28 A 2 LT PLラベル貼付け位置 LST 147(リファレンスマーク検出位置) 10-M3 通シ 7.5 28 28 28 28 20 8 10 E LU 11.5 C 15 31 51 近接センサ付き スライダ長さ LT[mm] スライダ部 タップ穴数[個] ドグ取付け位置 C[mm] スライダ質量 [kg] 127 10 56 0.52 ユニット全長 LU[mm] ストローク LST[mm] ベース固定用 タップ穴ピッチ寸法 A[mm] 356 189 96 459 292 561 ベース固定用 取付け穴数 2×(N +1)[個] リファレンスマーク 検出位置 [mm] N [個] B [mm] 8 3 16 1.8 100 10 4 11.5 2.1 394 100 12 5 12.5 664 497 100 14 6 14 2.7 766 599 100 16 7 15 3.0 868 701 100 18 8 16 3.3 本体質量 [kg] 2.4 147 注)本体質量にはスライダ1個分の質量を含みます。 10 選定方法 RDM-miniは以下の手順に従って選定してください。 ※ご使用条件をご提示いただければTHKにて推奨形番を選定させていただきます。詳しくはTHKまでお問い合わせください。 (1)必要最大推力の検討 ............ 最高速度駆動時において必要な最大推力が、 推力−速度特性 (F-V 曲線)上の最大推力の 90%以下であること。 (2)二乗平均推力の検討 ............ ご使用駆動条件における二乗平均推力が、1 サイクルの平均速度 における推力−速度特性(F-V 曲線)上の連続定格推力の 80%以 下であること。 ※RDM- miniは標準仕様がフラットケーブル仕様となっており、ここでの検討もフラットケーブル仕様を想定しています。お客さまにて 別途ケーブルベアを設置されるような場合には検討条件の搭載質量にケーブルベア及び挿入するケーブル質量も考慮の上、検討する必要 があります。 ●選定例 以下に RDM1104 タイプを使用し、質量 0.4kg を下記動作パターンで駆動させることが可能 であるかの検討を実施します。 選定形番 搭載質量 スライダ質量 動作速度 加速度 ストローク 摩擦係数 重力加速度 動作パターン :RDM1104-H-459L :m1=0.4kg :m2=0.32kg [各ユニットタイプのスライダ質量は基本寸法および質量(→P.7∼P.10)をご参照ください] 速度 :V=1.0m/s (m/s) ストローク:300mm 1.0 :α=10m/s2 :L=300mm :µ=0.003 時間 :g=9.807m/s2 (s) :図1 等速時間 t2=0.2 加速時間 t1=0.1 減速時間 t3=0.1 停止時間 t4=0.5 1サイクル時間 T=0.9 図1 動作パターン (1) 必要最大推力の検討 必要となる最大推力は次の3式により求められた各値の最大値となります。 :F =(m1+m2)×g×µ = (0.4+0.32)×9.807×0.003 = 0.02 N 加速時推力 :Fa = (m1 +m2) × α+F = (0.4+0.32) × 10+0.02 = 7.22 N 減速時推力 :Fd = (m1 +m2) × α-F = (0.4+0.32) × 10-0.02 = 7.18 N 上記の計算結果より 最大推力 :Fmax = Fa = 7.22 N RDM1104 負荷力 60 推力(N) 45 39.4N 38.03N 32.6 N 30 15 4.7N 3.7N 0 1.0 2.0 3.0 速度(m/s) 4.0 図2 推力–速度特性図 11 5.0 Linear Motor Actuater 一方、RDM1104の推力–速度特性図(図2)より モータの最大推力:Fpeak= (V=1.0m/s)の推力を読み取ると Fpeak= (V=1.0m/s)=38.03N 従ってモータの最大推力に対する必要最大推力比は 7.22 Fmax ×100=19% (< 90%) ×100= 38.03 Fpeak (2) 二乗平均推力の検討 (1)で計算した負荷力、加速時推力、減速時推力 および動作パターン内の各時間より二乗平均推力 を計算します。 二乗平均推力: Fa2 ×t1+F2×(t2+t4) +Fd2 × t3 T Frms = 加速時推力 Fa=7.22N 負荷力 F=0.02N = 7.222 ×0.1+0.022 ×(0.2+0.5)+7.182 ×0.1 0.9 減速時推力 Fd=7.18N 等速時間 t2=0.2s 加速時間 t1=0.1s 減速時間 t3=0.1s 停止時間 t4=0.5s 1サイクル時間 T=0.9s = 3.39 N 図3 推力と時間 また、動作パターンより平均速度:Vaverageを計算 すると Vaverage = L 300 = = 333.3mm / s =0.33m/ s . T 0.9 一方、RDM1104の推力–速度特性図(図4)より RDM1104 60 モータの連続定格推力:Fcont.(Vaverage = 0.33m / s)の 推力を読み取ると 従ってモータの連続定格推力に対する二乗平均推力比は 推力(N) Fcont. =4.64 N 45 39.4 N 32.6 N 30 15 4.7N 3.39 Frms ×100= 73%(<80%) ×100 = 4.64 Fcont. 4.64N 3.7N 0 1.0 2.0 3.0 4.0 5.0 速度(m/s) 0.33m/s 図4 推力–速度特性図 上記最大推力比および二乗平均推力比の検討結果より、動作可能と判断される。 12 ドライバ詳細仕様 高速パルス入力基板有無 RDM1106用 RDM1104用 RDM1102用 高速パルス入力基板無し SGDH-01BEY364-N 高速パルス入力基板付き [JUSP-LD001A] SGDH-01BEY364-H RDM1108用 ● 仕様1 ドライバ形式 最大適用モータ容量 定 格 基 本 仕 様 入 力 電 源 周 囲 条 件 2.4Arms 最大出力電流 主回路入力電源 7.2Arms 制御回路入力電源 単相 AC100∼115V(-15%∼+10%)50/60Hz 制御方式 フィードバック 使用温度/保存温度 ※2 [CN2] シリアルエンコーダ(インクリメンタル) 0°C∼+55°C※1/-20°C∼+85°C 90%RH以下(結露なきこと) 4.9m/s2/19.6m/s2 フィードフォワード補償 位置決め完了幅設定 指令パルス 入力パルス形態 (CN1) 入力パルス周波数 0.8kg 1.0kg 0∼450mm/s(設定分解能 1mm/s) 0∼100%(設定分解能 1%) 0∼250指令単位(設定分解能 1指令単位) 符号+パルス列、CCW+CWパルス列、90度位相差2相パルス(A相+B相)のうち、いずれか1種類を選択 5V差動ラインレシーバ入力、オープンコレクタ(+5Vまたは+12Vレベル) 最大500kppsただし、オープンコレクタの場合は最大200kpps 符号+パルス列、CCW+CWパルス列、90度位相差2相パルス (A相+B相)のうち、 いずれか1種類を選択 入力パルス種類 入 力 指令パルス 信 入力パルス形態 号 (CN8) − − 5V差動ラインレシーバ入力 入力パルス周波数 − 最大4Mpps(符号+パルス列、CCW+CWパルス列) 最大1Mpps(90度位相差2相パルス (A相+B相)) 制御信号 速度制御範囲 性 能 速度指令 入力 1:5000(速度制御範囲の下限は、定格負荷時停止しない条件) 0∼100%負荷時:±0.01%以下(定格速度にて) 定格電圧±10%にて:0%(定格速度にて) 温度変動率 25±25°Cにて:±0.1%以下(定格速度にて) 推力制御精度再現性 指令電圧 速度指令 入力 入力インピーダンス 回路時定数 指令電圧 推力指令 入力 入力インピーダンス 回路時定数 接点速度 入力 +12V(1kΩ抵抗内蔵)※3 電圧変動率 ソフトスタート時間設定 入 力 信 号 クリア信号(入力パルス形態は指令パルスと同一) 負荷変動率 周波数特性 13 単相全波整流 IGBT PWM制御 正弦波電流駆動方式 耐振動/耐衝撃 内蔵オープンコレクタ用電源 速 度 ・ 推 力 制 御 モ ー ド 単相 AC100∼115V(-15%∼+10%)50/60Hz 使用・保存湿度 入力パルス種類 位 置 制 御 モ ー ド SGDH-01BEY364-H 連続出力電流 概略質量 バイアス設定 性 能 SGDH-01BEY364-N 100W 移動方向選択 速度選択 400Hz(JL=JMにて) ±2% 0∼10s(加速・減速それぞれ設定可) DC±6V(DC±2V∼±10V:可変設定範囲)/定格速度にて(プラス指令で正方向) 許容入力電圧:±12V(max) 約14kΩ 約47μs DC±3V (DC±1V∼±10V:可変設定範囲) /定格推力にて(プラス指令で正方向推力指令) ±12V(max) 約14kΩ 約47μs P動作信号入力を使用 正方向/負方向電流制限信号を使用(第1∼3速度選択)両方OFFの時、停止または別の制御方式になる Linear Motor Actuater ● 仕様2 ドライバ形式 出力形態 位置信号出力 入 出 力 信 号 SGDH-01BEY364-N 分周比 信号の割付 シーケンス入力信号 変更が可能 SGDH-01BEY364-H A相、B相、C相:ラインドライバ出力 任意分周 サーボオン、P動作(または、制御モード切替、内部設定速度によるモータ運転の正/逆方向切 替、ゼロクランプ、指令パルス阻止)、正方向駆動禁止(P-OT)、逆方向駆動禁止(N-OT)、ア ラームリセット、正方向側電流制限/逆方向側電流制限(または、内部速度選択) 固定出力 サーボアラーム、アラームコード(3ビット出力) シーケンス出力信号 信号の割付 変更が可能 位置決め完了(速度一致)、モータ移動中、サーボレディ、電流制限中、速度制限中、ブレーキ ダイナミックブレーキ(DB)機能 主電源オフ、サーボアラーム、サーボオフ、オーバトラベル時にDB(ダイナミックブレーキ)動作 オーバートラベル(OT)防止機能 P-OT、N-OT動作時DB停止、減速停止またはフリーラン停止 回生処理機能 解放、警告、NEAR信号の中から、3種類の出力信号を選択可能 回生抵抗器は外置き 0.01<A/B<100 電子ギヤ 過電流、過電圧、不足電圧、過負荷、回生異常、主回路検出部異常、ヒートシンク過熱、オー 保護機能 バフロー、過速度、エンコーダ異常、暴走防止、CPU異常、パラメータ異常、他 LED表示機能 CHARGE、POWER 7seg-LED×5個(ディジタルオペレータ機能を内蔵) 速度、推力指令信号などの観測のためアナログモニタ用コネクタを内蔵 観測用アナログモニタ機能 [CN5] 内 蔵 機 能 速度:1V/1000min-1 推力:1V/(定格推力100%) 偏差パルス:0.05V/指令単位または0.05V/100指令単位 通信機能 接続機器 ディジタルオペレータ(JUSP-OP02A-2) 1:N通信 RS-422Aポート時、N=14局まで可能 軸アドレス設定 ユーザ定数によって設定 状態表示、ユーザ定数設定、モニタ表示、アラームトレースバック表示、JOG運転、 機能 アプリケーション モジュール対応 その他 オートチューニング操作、速度・推力指令信号などの描画機能 対応可能なアプリケーションモジュールには、以下の種類があります。 JUSP-NS100:MECHATROLINK I/Fユニット JUSP-NS300:DeviceNet I/Fユニット JUSP-NS500:PROFIBUS-DP I/Fユニット JUSP-NS600:INDEXER アプリケーションモジュール JUSP-LD001A:高速パルス入力 I/Fユニット 逆方向接続、原点サーチ、モータ自動判別機能、電源高調波抑制用DCリアクトル接続端子 ※1 この範囲内の周囲温度でサーボパックを取付けてください。ボックスに収納する場合も、 ボックス内の温度がこの値を超えないようにしてください。 ※2 出荷時設定では位置制御モードに選択してあります。 ※3 内蔵オープンコレクタ用電源は、 サーボパック内制御回路と電気的に絶縁してありません。 14 ● SGDH−01BEY364−N 外形寸法(mm) 100V 160 SGDH-01BEY364 8 55 (75) 130 ● SGDH−01BEY364−H 外形寸法(mm) 100V 160 SGDH-01BEY364 75 15 (75) 130 Linear Motor Actuater ● 接続図 SGDH−01BEY364−N SGDH−01BEY364−H※1 ※ 1 パルス入力は高速パルス入力基板の CN8 のコネクタに接続してください。 単相AC100∼115V (50/60Hz) +10% -15% 1MCCB ノイズフィルタ 電源OFF 電源ON 1MC アラーム処理 1MC 電磁接触器、リレーのコイルにはサージサプレッサを つけてください。 SUP ※4 1MC B1 L1 B2 V W SGDH-01BEY364 L1C L2C 1 D(4) CN2 2 必ず接地してください。 5 SG 6 速度指令 (±2V∼±10V/定格速度) 推力指令 (±1V∼±10V/定格推力) ※5 シリアルコンバータ CN1 ※3 V-REF T-REF 9 SG 10 A(1) モータ B(2) M C(3) U L2 リニアスケール(アナログ) シールド線の端末処理を 確実に行ってください。 LPF 37 ※3 A/D 38 LPF 39 ALO1 アラームコード出力 最大使用電圧 DC30V ALO2 最大出力電流 DC20mA ALO3 ※2 位置指令 PULS CW A相 PULS 7150Ω /PULS 8 SIGN CCW B相 SIGN 11 /SIGN 12 35 PBO CLR 15 36 /PBO /CLR 14 CLR +12V PL1 オープンコレクタ PL2 指令用電源 PL3 ※6 +24V +24V 1Ry 1Ryオンでサーボオン 2RyオンでP動作 P-LSオフで正転駆動禁止 N-LSオフで逆転駆動禁止 2Ry /PAO 19 PCO 20 /PCO 25 26 47 3.3KΩ /S-ON 40 /サーボON /P-CON 41 比例制御 (P動作) 27 PG分周出力 適用ラインレシーバ T・I製 SN75175形 または、MC3486相当品 /V-CMP+ 速度一致検出 (/COIN+) :速度一致検出でON /V-CMP- 位置決め完了 (/COIN-) :位置決め完了でON /TGON+ 28 TGON出力 /TGON- :設定値以上でON /S-RDY+ P-OT 42 正転駆動禁止 N-LS N-OT 43 逆転駆動禁止 29 アラーム リセット 30 サーボレディ出力 /S-RDY- :レディでON 正転側電流 制限ON 逆転側電流 制限ON 31 ALM+ 32 ALM- 3Ryオンでアラームリセット 7Ryオンで逆転側電流制限ON 18 PAO 34 P-LS 3Ry 6Ryオンで正転側電流制限ON 31KΩ 13 33 /ALM-RST 44 /P-CL 45 6Ry 7Ry /N-CL 46 コネクタシェル サーボアラーム出力 :アラームでOFF ホトカプラ出力 最大使用電圧DC30V 最大出力電流DC50mA FG シールド線はコネクタシェルにつなぎます ※2 はツイストペア線を示しています。 ※3 一次フィルタで、時定数47μsです。 ※4 本回路は感電のおそれがあるので、外部からの接触 防止のため保護分離しています。 ※5 SELV回路です。二重絶縁あるいは強化絶縁による 保護分離により、他の回路から分離してあります。 ※6 DC24V電源は、二重絶縁された機器を使用してく ださい。 16 ドライバ入出力信号機能説明 ●[CN1] 適用リセプタクル形式 ドライバ内使用コネクタ仕様 [CN1] ハンダ付けタイプ 10250-52A2JL相当品 ライトアングル50P 10150-3000VE ケース メーカ名 10350-52A0-008 住友スリーエム(株)製 注)CN1コネクタはドライバに付属してあります。 共通 入 力 信 号 速度 トルク 位置 指令 共通 出 力 信 号 速度 位置 予備 信号名 /S-ON /P-CON ピンNo. 40 41 P-OT N-OT /P-CL /N-CL 42 43 45 46 /ALM-RST +24VIN V-REF T-REF PULS /PULS SIGN /SIGN CLR /CLR PL1 PL2 PL3 ALM+ ALM/TGON+ /TGON/S-RDY+ /S-RDYPAO /PAO PBO /PBO PCO /PCO ALO1 ALO2 ALO3 FG /V-CMP+ /V-CMP/COIN+ /COIN- 44 47 5 (6) 9 (10) 7 8 11 12 15 14 3 13 18 31 32 27 28 29 30 33 (1) 34 35 36 19 20 37 38 39 (1) シェル 25 26 25 26 16,17,23 24,50 機能 サーボオン:インバータ部のゲートブロック解除により、モータが通電状態になります。 ※ユーザ定数の設定により、機能を選択します。 比例動作指令 オンで速度制御ループがP1 (比例・積分)制御からP(比例)制御に切り替わります。 移動方向指令 内部速度指令選択の場合: 移動方向を切り替えます。 制御モード切替え 制御モードの切り替え可能(位置⇔速度、位置⇔トルク、トルク⇔速度) ゼロクランプ指令 ゼロクランプ機能付き速度制御: オンで速度指令をゼロとみなします。 指令パルス阻止指令 指令パルス阻止機能付き位置制御: オンで指令パルスの入力を阻止します。 正転駆動禁止 オーバトラベル防止:機械の可動部が移動できる領域を越えたときに、 モータの駆動を停止します。 逆転駆動禁止 ※ユーザ定数の設定により、機能を選択します。 正転側電流制限オン オンで電流制限機能が有効。 逆転側電流制限オン 内部速度切り替え 内部速度指令選択の場合: 内部設定速度を切り替えます。 アラームリセット: サーボアラーム状態を解除します。 シーケンス信号用制御電源入力:+24V(電源はお客様準備です。)動作可能電圧範囲:+11V∼+25V 速度指令入力:±2V∼±10V/定格回転速度(入力ゲインはユーザ定数で変更可能) トルク指令入力:±1V∼±10V/定格トルク(入力ゲインはユーザ定数で変更可能) 指令パルス入力 入力モード ラインドライバ、オープンコレクタに対応 ・符号+パルス列 ・CCW/CWパルス ・2相パルス(90度位相) 偏差カウンタクリア:位置制御時に偏差カウンタをクリアします。 PULS、SIGN、およびCLR指令信号がオープンコレクタ出力信号の場合、+12Vプルアップ電源を供給し ます。(+12V電源はドライバ内蔵) サーボアラーム:異常検出により、オフします。 モータ動作中検出:モータが設定値以上の速度で動作中であることを検出します。検出速度はユーザ定 数で設定可能です。 サーボレディ:制御/主回路電源オンでサーボアラ−ムが発生していない場合にオンします。 A相信号 B相信号 C相信号 アラームコード出力:3ビットでアラームコードを出力します。 オープンコレクタ 最大定格 30V 20mA 入出力信号用ケーブルのシールド線をコネクタシェルに接続することで、 フレームグランド (アース) に接続されます。 速度一致(速度制御モードの場合に出力): モータ速度が設定範囲内で、速度指令値に一致したことを検出します。 位置決め完了(位置制御モードの場合に出力):偏差パルスが設定値以内に入った時にオンします。設定 値は偏差パルスのパルス数で、指令単位(電子ギヤで定義した入力パルスの単位)で設定します。 空き端子:空き端子は、中継などに使用しないでください。 注)( )内のピンNo.はシグナルグランドを示します。 17 2相パルス(A相、B相)変換エンコーダ出力信号 および原点パルス(C相)信号: RS422相当 Linear Motor Actuater ●[CN8] (高速指令パルス入力コネクタ) 適用リセプタクル形式 ドライバ内使用コネクタ仕様 [CN8] ハンダ付けタイプ 10226-52A2JL相当品 ライトアングル26P 10126-3000VE ケース メーカ名 10326-52A0-008 住友スリーエム(株)製 注)CN8コネクタは高速パルスボードに付属してあります。 信号名 PULS /PULS 入 SIGN 力 信 /SIGN 号 位置 ︵ 指令 CLR C /CLR N 8 SG(GND) ︶ SG(GND) ピンNo. 10 11 12 13 17 18 19 26 機能 指令パルス入力 入力モード RS422準拠ラインドライバ(TI製SN75174 相当品)に対応。 ・符号+パルス列 インターフェースは、ラインレシーバ(TI製SN75175相当品)仕様。 ・CCW/CWパルス ・2相パルス(90度位相) 偏差カウンタクリア: 位置制御時に偏差カウンタをクリアします。 パルス指令コントローラ側のパルス出力のSGとドライバSGは必ず接続して同レベルにしてください。 ● 接続例 上位装置 高速指令パルス入力インターフェース P 適用ラインドライバ TI製 75ALS194 相当品 PULS CN8-10 /PULS CN8-11 SIGN CN8-12 /SIGN CN8-13 CLR CN8-17 /CLR CN8-18 P P 入力ラインレシーバ SG CN8-19, 26 コネクタシェル TI製 SN75175 相当品 oV FG Pはツイストペア線を示します。 ● CN8端子配列 2 − 1 − − 3 − − − 4 − − 6 − − 5 8 10 12 − PULS SIGN − 指令符号 入力 − − 17 CLR クリア入力 19 SG GND − 7 − − 9 − − 11 /PULS 指令パルス 入力 − 指令パルス 入力 15 21 13 /SIGN 指令符号 入力 − 14 − − 16 − − 18 /CLR クリア入力 20 − − 22 − − 24 − − 26 SG GND − 23 − − 25 − − 注1)空き端子には,接続しないでください。 注2)ケーブルのシールド線はコネクタシェルに接続してください。 注3)ユニット側コネクタでFG(フレームグランド)に接続します。 18 シリアル変換モジュール詳細仕様 [JZDP−D008−***] 注)シリアル変換モジュールはユニット本体に付属してあります。 ● 特性・仕様 電源電圧 ※1 消費電流 120mA Typ. 350mA Max. 信号分解能 入力2相正弦波ピッチの1/256 最高応答周波数 電 気 的 特 性 出力信号※2 出力方式 シリアルデータ伝送(マンチェスタコードによるHDLCフォーマット) 62.5μs 出力回路 平衡型トランシーバ(SN75LBC176相当) 、内部終端抵抗120Ω 質量 ディファレンシャル入力差動振幅:0.4V∼1.2V 入力信号レベル:1.5V∼3.5V 250g 外形寸法 環 境 250kHz 位置データ、ポールセンサ情報、アラーム 通信周期 アナログ信号入力 (Cos,Sin,Ref) 機 械 的 特 性 +5.0V ±5% リップル含有率5%以下 90mm×60mm×23mm(本体部) 耐振動 98m/s2 max.(10∼2500Hz)3方向 耐衝撃 980m/s2(11ms)3方向 2回 動作温度範囲 0°C∼55°C 保存温度範囲 -20°C∼+80°C 湿度範囲 20%∼90%RH(結露なきこと) ※1 接続されるスケールの消費電流は含まれません。 ※2 出力信号は電源投入後100∼300ms後に送信可能となります。 ● 標準インターフェース 1. 上位コントローラ側 シリアルデータ出力 2. リニアスケール側 アナログ信号入力 1 9 5 6 1 8 9 15 第一電子工業㈱製 第一電子工業㈱製 17シリーズコネクタ 17シリーズコネクタ コネクタ : 17JE-13090-02 (D2C) コネクタ : 17JE-13150-02 (D8C) (ソケット) (ソケット) ピン№ 1 2 3 4 5 6 7 8 9 ケース 19 信 号 +5V S相出力 空き 空き 0V /S相出力 空き 空き 空き シールド ピン№ 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 ケース 3. リニアスケール側 ポールセンサ信号入力 信 号 /Cos入力 (V1-) /Sin入力 (V2-) Ref入力 (V0+) +5V 5Vs 空き 空き リミットスイッチ (Vq) Cos入力 (V1+) Sin入力 (V2+) /Ref入力 (V0-) 0V oVs 空き インナー シールド 1 6 5 9 第一電子工業㈱製 17シリーズコネクタ コネクタ : 17JE-13090 (D8C) ピン№ 1 2 3 4 5 6 7 8 9 ケース 信 号 +5V U相出力 V相出力 W相出力 0V 空き 空き 空き 空き シールド 注1)空きピンは使用しないでください。 注2)ケーブルを強く引っ張らないでください。 Linear Motor Actuater ● 外形寸法 (mm) 4-φ4 . 2 穴 NP 52 10 2-φ4 . 2 穴 60 2- #4 - 40 (UNCタップ) 1.5 65 3 72 300 82 23 90 4 - M5タップ深サ10 20 配線仕様 ● 動力ケーブル[RMKHD−**] (固定配線用) <ドライバ側> <フォーサ側> U V W FG 圧着端子 R1.25-4((株) ニチフ製) D-sub15芯メス カ バ ー:XM2S-1513(オムロン(株)製) メスプラグ:XM2D-1501(オムロン(株)製) 固 定 具 1:XM2Z-0003(オムロン(株)製) SCM側 D-sub9芯オス カバー :XM2S-0913(オムロン(株)製) オスプラグ:XM2A-0901(オムロン(株)製) ● エンコーダケーブル[RMKHE−01] (固定配線用) <SCM側> <エンコーダ側> D-sub15芯オス カ バ ー:XM2S-1513(オムロン(株)製) オスプラグ:XM2A-1501(オムロン(株)製) 21 リニア エンコーダ SCM 1m D-sub15芯オス オスプラグ:XM2A-1501(オムロン(株)製) カ バ ー :XM2S-1513(オムロン(株)製) 固 定 具 1:XM2Z-0003(オムロン(株)製) Linear Motor Actuater 配線仕様 ● シリアルケーブル[JZSP−CLP20−**] (固定配線用) <ドライバ側> <変換モジュール側> (φ6.8) L JZSP-CLP20-** プラグコネクタ:55100-0600 日本モレックス㈱製 ケーブル UL20276(AWG16×2C+AWG26×2P) 17シリーズコネクタ コネクタ:17JE-23090-02(D8C)(9ピン) 第一電子工業(株)製 ● シリアルケーブル[JZSP−CLP70−**] (可動部配線用) <ドライバ側> <変換モジュール側> (φ6.8) L JZSP-CLP70-** プラグコネクタ:55100-0600 日本モレックス㈱製 ケーブル UL20276(AWG22×2C+AWG24×2P) 17シリーズコネクタ コネクタ:17JE-23090-02(D8C)(9ピン) 第一電子工業(株)製 22 リニアモータアクチュエータ RDM-mini ご使用上の注意点 ●使用環境 アクチュエータとドライバは、使用環境が悪いと故障の原因となりますので、次のような場所で使用してください。 ・アクチュエータは周囲温度 0 ∼ 40℃の範囲内、周囲湿度 20 ∼ 80%RH の範囲内、凍結、及び結露が生じない場所 ・ドライバは周囲温度 0 ∼ 55℃の範囲内、周囲湿度 90%RH 以下、凍結、及び結露が生じない場所 ・腐食性ガスや可燃性ガスがない場所 ・鉄粉等の誘電性のある粉体、塵埃、オイルミスト、切削液、水分、塩分、及び有機溶剤が飛散しない場所 ・直射日光、輻射熱が当たらない場所 ・強電界、強磁界の発生しない場所 ・振動や衝撃が本体に伝わらない場所 ・点検や清掃のしやすい場所 ●安全上の注意 ・本製品を落下させたり、叩いたりしないでください。怪我や破損の原因になります。 ・本製品を分解しないでください。異物の侵入や精度劣化の原因となります。また、ドライバは感電の恐れがあります。 ・マグネットロッド(固定子)は強力なマグネットです。磁性体(特に金属類)を近づけないでください。マグネットの吸引力により、マグネットと金属片の間 に指などをはさまれる可能性があります。また、心臓ペースメーカを使用されている方は絶対に近づかないでください。 ・通電中はアクチュエータの動作部には触らないでください。また、製品の作動中または作動できる状態のときは、アクチュエータの作動範囲に立ち入ら ないでください。 ・アクチュエータ本体、ドライバおよび接続されている関連機器の設置、調整、点検、保守作業を行う際は、必ず全ての電源プラグをコンセントから抜き、 作業者以外が電源を投入復帰できないように、施錠、または安全プラグ等を用意してください。また、作業中の旨を明記した物を見易い位置に掲示し てください。 ・複数の人が作業を行う場合は、手順、合図、異常等の措置を予め確認し、別途、作業を監視する人をおいてください。 ・取扱説明書をよく読み、内容を十分理解し、安全のための注意事項は、必ず厳守してください。 ■取扱説明書 ・ 「リニアモータアクチュエータ RDM-mini 形 取扱説明書」は、THK テクニカルサポートサイトにログイン後、ダウンロードできます。 テクニカルサポートサイト https://tech.thk.com/ ●「LM ガイド」 「ボールリテーナ」「 」は THK 株式会社の登録商標です。 ●本カタログ記載の図・写真と実際の製品とでは異なる場合があります。 ●改良のため予告なしに外観、仕様等変更することがありますので、ご採用の時は事前にお問い合わせください。 ●カタログの制作には慎重を期しておりますが、誤字・脱字等により生じた損害については、責任を負いかねますのでご了承ください。 ●弊社製品・技術の輸出及び輸出の為の販売につきましては、外国為替及び外国貿易法、及びその他の法令の遵守を基本方針としております。 尚、弊社製品の単品での輸出については、予めご相談ください。 無断転載を禁ずる Global site : http:/ /www.thk.com/ 東日本第一営業統括部 東 京 支 店 TEL 03(5434)0341 上 野 支 店 TEL 03(5812)2071 川 越 支 店 TEL 049(224)7180 仙 台 支 店 TEL 022(232)7011 宇都宮支店 TEL 028(683)2225 長 岡 支 店 TEL 0258(37)1011 日 立 支 店 TEL 029(271)9311 FAX 03(5434)0345 FAX 03(3832)3051 FAX 049(225)3187 FAX 022(232)7015 FAX 028(663)4113 FAX 0258(37)0853 FAX 029(271)9313 東日本第二営業統括部 八王子支店 TEL 042(645)8101 厚 木 支 店 TEL 046(229)0808 静 岡 支 店 TEL 054(251)8261 浜 松 支 店 TEL 053(413)7871 沼 津 支 店 TEL 055(924)4001 甲 府 支 店 TEL 055(273)6827 諏 訪 支 店 TEL 0266(53)1144 上田営業所 TEL 0268(23)8506 FAX 042(646)0509 FAX 046(229)0809 FAX 054(251)8265 FAX 053(413)7874 FAX 055(923)4854 FAX 055(273)1159 FAX 0266(53)1146 FAX 0268(23)8507 中部営業統括部 名古屋支店 TEL 052(883)0851 豊 田 支 店 TEL 0566(82)3007 小 牧 支 店 TEL 0568(72)2031 金 沢 支 店 TEL 076(238)6158 三 重 支 店 TEL 059(379)3401 FAX 052(883)0855 FAX 0566(82)3870 FAX 0568(73)1894 FAX 076(238)0246 FAX 059(378)8329 西日本第一営業統括部 大 阪 支 店 TEL 06(6222)8211 FAX 06(6222)8212 京 滋 支 店 TEL 077(553)2431 FAX 077(553)2421 明 石 支 店 TEL 078(923)0621 FAX 078(923)6067 西日本第二営業統括部 福 岡 支 店 TEL 092(474)4471 広 島 支 店 TEL 082(286)0789 福 山 支 店 TEL 084(973)1501 松 山 支 店 TEL 089(972)7411 熊 本 支 店 TEL 096(370)1181 FAX 092(474)5429 FAX 082(286)0794 FAX 084(973)1502 FAX 089(972)7511 FAX 096(370)1182 海外営業統括部 TEL 03(5434)0351 FAX 03(5434)0353 【製品・技術に関するお問い合わせ先】 テクノセンター 営業技術統括部 〒144-0033 東京都大田区東糀谷4-9-16 TEL 03(5735)0225 FAX 03(5735)0273 ©THK CO., LTD. 20080404 J1 Printed in Japan
© Copyright 2026 Paperzz