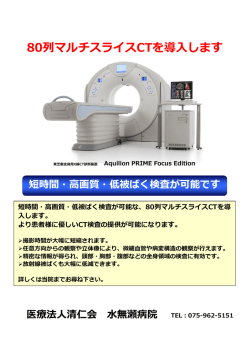
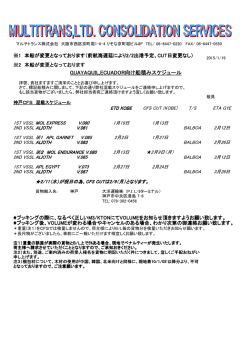
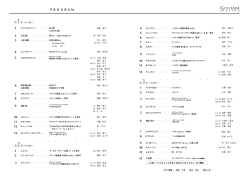
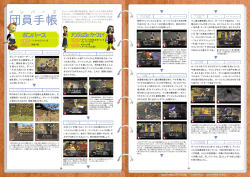
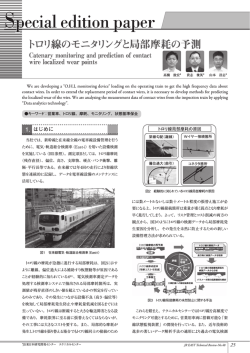
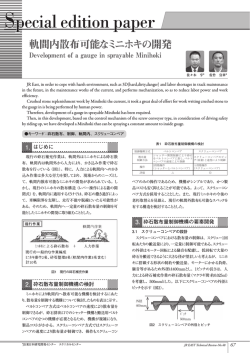
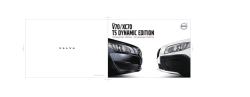
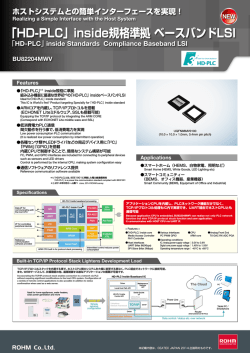
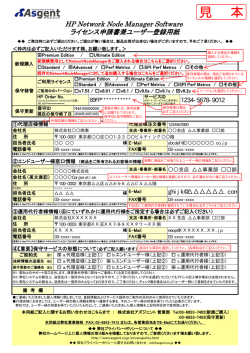
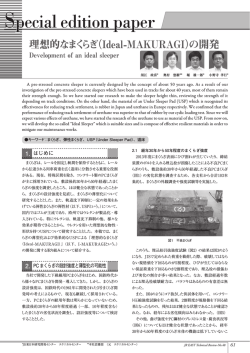
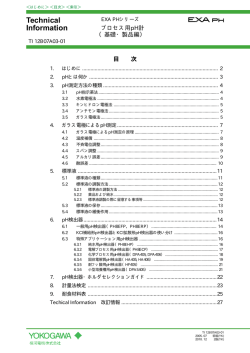
Technical Information ASTMAC 入門書(PLC 計装編) TI 34P02K11-03 TI 34P02K11-03 横河電機株式会社 2001.3 初版 2 本書の目的 本書は初めて ASTMAC でシステム構築する人のための入門書です。ただ読むだけではなく,簡単なシ ステムを実際に作成しながらシステム構築の基本的な考え方と操作方法を習得することを目的にして います。 PLC 計装編では R3 よりリリースされた計装パッケージについて具体的な構築方法等を紹介します。 PID 調節などループ制御を必要とする装置や設備に対して,容易にかつコストミニマムに PLC 計装シ ステムの構築を可能とする計装パッケージおよび計装 CPU モジュールについて紹介します。 全体に,あくまでも「システム構築の基本的な流れ,ツールの操作方法の習得」を目的にしているため, リファレンス的な要素は少なくなっていますが,各例題の前に,ASTMAC の用語や概念を簡単にまと めてみました。実習に取り掛かる前に,こちらをご一読される事をお勧めします。また,図版を多くし て,手順をシンプルに記述することを心がけたために,やや説明不足になっている面があり,それをコ ラムという形で補っています。基本的な用語の解説や操作のヒントなどですが,内容が「難しい」と感 じた場合は飛ばしても作業手順には影響しませんので,こちらは後日,ゆっくり読まれても大丈夫だと 思います。 なお,実習のシミュレートにあたり,体験版では実行できない項目があります点はご了承ください。 TI 34P02K11-03 1st Edition:2001.3.29-00 3 目次 1. ループ制御をプログラミングレスで実現 ................................................................ .............................................................................................. .............................................................. 4 2. ループ制御とシーケンス制御の融合 ................................................................ ................................................................................................ ..................................................................... ..................................... 8 3. 操作監視機能 ................................................................ ................................................................................................ ................................................................................................ ........................................................................ ........................................ 9 4. 構築手順 ................................................................ ................................................................................................ ................................................................................................ ............................................................................. ............................................. 10 4.1 実習の概要........................................................................................................................................ 10 4.2 制御ユニットビルダでの作業 ........................................................................................................... 11 4.2.1. 制御ブロックの登録.................................................................................................................. 11 4.2.2. ダウンロード............................................................................................................................. 15 4.2.3. リソースファイル作成 .............................................................................................................. 15 4.3 データサーバの登録 ......................................................................................................................... 16 4.4 グラフィック画面作成...................................................................................................................... 17 TI 34P02K11-03 1st Edition:2001.3.29-00 4 1. ループ制御をプログラミングレスで実現 PID 調節などループ制御を実現するのに,温調計やループコントローラなどパネル計器,ラック計器で 対応する方法がありますが,ループ制御機能にシーケンス制御機能を融合させる必要がある場合,別途 PLC と通信させなければならず煩雑なシステムとなってしまいます。 PLC 単体でループ制御も対応すると,シーケンス制御との融合は PLC 自身で完結できますが,すべて がラダープログラムによる手作りとなってしまうため設計・デバッグが大変なだけでなく,後々の増改 造においてもその度に既存プログラムを見直す必要がでてきます。 また,ラダープログラムは人によって作り方が異なるため担当者以外がプログラムを改造することは困 難です。 ループ制御とシーケンス制御を融合させる場合。。。 パネル計器+PLC PLC 単体で対応 ・ラダープログラム による手作り。 ・設計者によって 作り方異なる。 YS シリーズ 機器間の通信が必要。 ラダープログラムによる手作り。 設計・デバッグ・増改造のすべてが大変!! ASTMAC 計装パッケージは,従来 のパネル計器/ラック計器の機能 を持ったソフトウェア化された計 器「制御ブロック」によるループ 制御を可能にしています。 他のコントロール同様に,用意さ れた制御ブロックから必要なもの を選択し,各種パラメータを設定 するだけで使用できます。また定 義項目も標準化されているので, 設計担当者ではない人も容易にメ ンテナンスが行え,設計からデバ ッグ・保守・増改造に至るまで作 業効率が大幅に軽減します。 さらに,制御ブロックには,アラ TI 34P02K11-03 1st Edition:2001.3.29-00 5 ーム監視機能や積算機能なども標準装備されているので,これらの機能をラダープログラムにより作成 する必要はありません。 TI 34P02K11-03 1st Edition:2001.3.29-00 6 制御ブロックの分類・種類を表に示します。 大分類 連続制御 大種類(中分類) 名称 SPV3 SPV8 ○ ○ 入力指示 PVI 入力指示ブロック 調節制御 PID PID 調節ブロック ○ PID-HC 加熱冷却調節ブロック ○ PI–HLD サンプル PI 調節ブロック ○ ONOFF 2 位置オンオフ調節ブロック ○ ONOFF-G 3 位置オンオフ調節ブロック ○ CV04 CV04 調節ブロック ○ ○ CT04 CT04 調節ブロック ○ ○ CR04 CR04 調節ブロック ○ ○ CV04HC CV04 調節(加熱冷却専用)ブロック ○ ○ CT04HC CT04 調節(加熱冷却専用)ブロック ○ ○ CR04HC CR04 調節(加熱冷却専用)ブロック ○ ○ MLD-SW 出力切替スイッチ付手動操作ブロック ○ ○ MLD-PVI 指示値付手動操作ブロック ○ ○ 比率設定 RATIO 比率設定ブロック ○ ○ 信号選択 SS-HI 信号選択(最大値選択)ブロック ○ ○ SS-LO 信号選択(最小値選択)ブロック ○ ○ プログラム設定 PROG プログラム設定ブロック ○ ○ 定量設定 BSETU 定量設定ブロック ○ ○ 定数設定 DSET 定数設定ブロック ○ ○ DSET- C 文字型定数設定ブロック ○ ○ BDSET バッチデータ設定ブロック ○ ○ BDSET- L ロングワード型バッチデータ設定ブロック ○ ○ 変化率制限 VELLIM 変化率制限ブロック ○ ○ 数値演算 ADD 加算ブロック ○ ○ SUB 減算ブロック ○ ○ MUL 乗算ブロック ○ ○ DIV 除算ブロック ○ ○ 温調モジュール 手動操作 バッチデータ設定 演 算 形名 TI 34P02K11-03 1st Edition:2001.3.29-00 7 演算 通 信 アナログ演算 NL 折れ線関数ブロック ○ ○ TPC 温圧補正演算ブロック ○ ○ TC 温度補正演算ブロック ○ ○ PC 圧力補正演算ブロック ○ ○ DLAY むだ時間ブロック ○ ○ DLAY- C むだ時間補償ブロック ○ ○ LDLAG 進み遅れブロック ○ ○ SC スケール変換ブロック ○ ○ CMP 比較ブロック ○ ○ 汎用演算 CALC 算術演算ブロック ○ ○ 温調計 UT UT 調節ブロック ○ ○ UTHC UT 調節(加熱冷却専用)ブロック ○ ○ UPM UPM 電力モニタブロック ○ ○ UZ UZ 電力モニタブロック ○ ○ 電力モニタ シーケンス ラダー LADDER ラダーブロック ○ ○ 制御 スイッチ計器 SI-1 1 入力スイッチ計器ブロック ○ ○ SI-2 2 入力スイッチ計器ブロック ○ ○ SO-1 1 出力スイッチ計器ブロック ○ ○ SO-2 2 出力スイッチ計器ブロック ○ ○ SIO-11 1 入力 1 出力スイッチ計器ブロック ○ ○ SIO-12 1 入力 2 出力スイッチ計器ブロック ○ ○ SIO-21 2 入力 1 出力スイッチ計器ブロック ○ ○ SIO-22 2 入力 2 出力スイッチ計器ブロック ○ ○ SIO-12P 1 入力 2 パルス出力スイッチ計器ブロック ○ ○ SIO-22P 2 入力 2 パルス出力スイッチ計器ブロック ○ ○ TI 34P02K11-03 1st Edition:2001.3.29-00 8 2. ループ制御とシーケンス制御の融合 制御ブロックが動作する計装 CPU モジュールでは,ラダープログラム動作環境も用意されているの で,ループ制御とシーケンス制御の融合が可能となります。 TI 34P02K11-03 1st Edition:2001.3.29-00 9 3. 操作監視機能 ASTMAC は,ループ制御の各種パラメータの監視・設定するために計器図(フェースプレート)やチ ューニングパネル(制御ブロックのチューニングデータ設定用画面)を用意しています。これら画面を 一から手作りする必要はありません。 ASTMAC 計装パッケージ 一般監視ソフト FIC100 PV 117.4 SV 100.0 MV 60.3 MODE AUT PH 135.0 PL 80.0 ◆高精細グラフィック画面の任意の個所に 貼付け可能 ◆タグ名の指定で必要なデータが表示 LIC300 65.9 57.2 27.7 CAS 85.0 15.0 ◆監視・設定したいデータを一つずつ 登録しなければならない。 フェースプレート ◆登録した制御ブロックのチューニング データ設定画面も用意 チューニングパネル TI 34P02K11-03 1st Edition:2001.3.29-00 10 4. 構築手順 ここでは,制御ブロックの登録から,その定義情報をデータサーバへ反映させ,グラフィック画面に フェースプレートとして表示させるところまでの基本的な手順を紹介します。FA-M3 と計装 CPU モジ ュール(SPV3 または SPV8)がないと動作の確認はできませんが,使用するツールやダイアログの入力方 法などを実習してください。 4.1 実習の概要 データサーバと計装パッケージ,ラダープログラムとの関係を示します。 SV PID PV LIC100 IN AD08 3ch MV OUT DA04 2ch TI 34P02K11-03 1st Edition:2001.3.29-00 11 4.2 制御ユニットビルダでの作業 4.2.1. 制御ブロックの登録 ① 制御ユニットビルダの起動 登録には[制御ユニットビルダ]を用いますので,ランチャから起動してください。 ② ユニットの追加 制御機能の構築では,はじめにプロジェクトに制御ユニットを定義する必要があります。 制御ユニットビルダが起動したら,制御ユニットを追加します。 ②ダイアログが開くので, 図のとおりに入力します ①[ユニットの追 加]を選択します。 リストビュー上に[ユニット共通定義]が表示されますので,今度は[ユニット共通定義]をダブルク リックします。 UnitXX(XX は01~16) IP アドレスを入力します。 データサーバでのデータ収集におけるタイム アウト監視時間(単位:秒)とエラーリトライの 回数です。通常はデフォルトのままにしてお いてください。 TI 34P02K11-03 1st Edition:2001.3.29-00 12 ③ 計装 CPU モジュールの追加 制御ユニットに実装する計装 CPU モジュールの定義を行います。 ツリービュー上「Unit01」を選択した状態で,メニューの[プロジェクト(P)]−[CPU の追加(U)] を選択します。 1スロット目に計装 CPU モジュール“SPV8”を実装することを想定して「CPU 番号:1, CPU タ イプ:SPV8」 と指定します。 [OK ボタン]を押すと,リストビューには以下の定義用のファイルが作成されます。 [CPU 共通定義]の内容は,「制御ユニット電源投入時のスタート処理」と「演算ブロックの PT リ ソースへの出力」ですが, デフォルトとします。[ラダーブロック定義]は FA-M3 側ツールで作成したラダープログラムのファ イルを指定しますが,この実習では省略します。 TI 34P02K11-03 1st Edition:2001.3.29-00 13 ④ 入出力モジュールの定義 制御ユニットに実装するモジュールを定義します。リストビュー上「入出力モジュール定義」をダブル クリックしてください。 スロット番号 ダブルクリック ダブルクリックするとモジュール一覧が表示されますので,指定のモジュールを選択し,,[OK ボタ ン]を押します。 ここでは,Main(制御ユニット)の2スロット目に「アナログ入力モジュール/AD08」を,3スロッ ト目に「アナログ出力モジュール/DA04」を定義します。 ⑤ 制御ブロックの定義 リストビュー上の「制御ブロック定義」をダブルクリックします。[制御ブロック一覧]が表示されま す。 制御ブロック一覧 1行目をダブルクリックすると[制御ブロックタイプの選択]ダイアログが表示されます。 TI 34P02K11-03 1st Edition:2001.3.29-00 14 「PID 調節」を選択,OK ボタンを押し,詳細定義画面で以下の通り指定します。 タグ名:LIC100 コメント:タンクレベル スケール上限値:3 スケール下限値:0 小数点位置:1 工業単位:m 入力端子の結合は こ こをクリックします。 *数値入力時は入力モードを半角にしておくこと [入力(IN)端子」に I/O 信号との接続を定義します。現在登録している PID 調節ブロックの入力信 号に上記で定義した「2スロット目の3ch.」を結合します。入力端子の入力領域をクリックすると [結合ウイザード]がスタートするので,その指示に従って設定します。 I/O チャネルを選択します。 Main/02 AD08/03(3ch の意)/1~5VDC を順次選択します。 完了を押すと表示されます 同様に出力(OUT)端子にも「3スロット目の2ch.」を結合します。結合ウイザードで Main/03 DA04 /02(2ch.の意)を順次選択し,完了をクリックします。 以上で制御ブロックの登録は完了です。プロジェクトを保存しましょう。[名前を付けて保存]で,「レ ベルデモ」とします。 制御ユニットビルダはまだ終了しないでください。 TI 34P02K11-03 1st Edition:2001.3.29-00 15 ● ラダーブロック ● シーケンス制御用のラダーブロックおよびマクロは WideField で作成します。その後,計装 用 CPU に実行形式ファイルをダウンロードするときに制御ブロックと一緒にシーケンス制御 用のラダーブロックとマクロもダウンロードします。リストビューに表示されている「ラダー ブロック定義」は,ダウンロードさせるラダーブロックとマクロのファイル名を指定するダイ アログボックスです。 4.2.2. ダウンロード 実際にはここで,接続した計装 CPU モジュールに対してダウンロードを行いますが,実習では省略し ます。 4.2.3. リソースファイル作成 定義した制御ブロック情報をデータサーバへ反映させるためリソースファイルを作成します。 制御ユニットビルダのメニュー[ファイル(F)]−[PT リソースファイル出力(R)] を選択しま す。 レベルデモという名前で保存するとリソースファイルが作成されます。制御ユニットビルダを終了して ください。 TI 34P02K11-03 1st Edition:2001.3.29-00 16 4.3 データサーバの登録 オブジェクトビルダを起動します。4.4.3 で作成したリソースファイルを読み込みます。(インポート といいます) メニュー「ファイル(F)」−[定義情報インポート(I)] を選択します。 ファイルタイプとして「プロセスタグリソースファイル」を選択し,インポート情報欄のアクティブに なっている項目すべてにチェックがついていることを確認してください。[OK ボタン]を押すとイン ポートのダイアログが表示されるので,「レベルデモ.PTR」を選択します。 制御ブロックもオブジェクト コントロールのひとつなの で,ダブルクリックでプロパ ティが表示されます。 データサーバの登録はこれだけですので,[名前を付けて保存]で,「レベルデモ」とし,保存します。 TI 34P02K11-03 1st Edition:2001.3.29-00 17 4.4 グラフィック画面作成 ① コントロールを貼り付ける グラフィックビルダを起動します。 フェースプレートコントロール(FacePlateX2)を選択し画面の適当な位置に貼り付けます。 FacePlateX2 ② プロパティの設定 フェースプレートのプロパティ「全般」タブにおいて,計器(タグ)の種類を指定します。 PID にします。(デフォルト) チェックが付いている事を確認してください [OK ボタン]を押して,プロパティの設定を終了します。 TI 34P02K11-03 1st Edition:2001.3.29-00 18 ③ プロパティリンク FacePlateX2 コントロールは,プロパティリ ンク機能を使用して,データサーバのオブジェ クトとの間でデータの結合を行うことができ ます。 ここでは,個々のプロパティリンクを行わなく ても,必要なプロパティの接続が可能な「一括 リンク」機能で設定を行います。 プロパティリンクの手順は今までと同じです。 オブジェクトエクスプローラ ①LIC100 のプロパティを表示しま す。+をクリックします。 ②1つずつ,フェースプレート 上にドラッグします。 ③ 「 LIC100 」 の 「 AL1DataLink 」 を 「FacePlate」の「AL1DataLink」に, 「 LIC100 」 の 「 AL2AttrLinkStr 」 を 「FacePlate」の「AL2AttrLinkStr」に, それぞれリンクさせます。 以上で終了です。 TI 34P02K11-03 1st Edition:2001.3.29-00 19 ◆Technical Information 改版履歴 資料名称:ASTMAC 入門書(PLC 計装編) 資料番号:TI 34P02K11-03 `01 年 03 月/初版/R3.01 以降* 新規発行 * :Technical Information 記載内容と対応しているソフトウェアのリリース番号。対応する範囲は次の改訂版が発 行されるまで。 著作者 発行者 横河電機株式会社 システム事業部オープンシステム部 横河電機株式会社 〒180-8750 東京都武蔵野市中町 2-9-32 TI 34P02K11-03 1st Edition:2001.3.29-00
© Copyright 2026 Paperzz