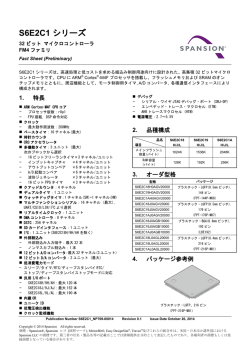
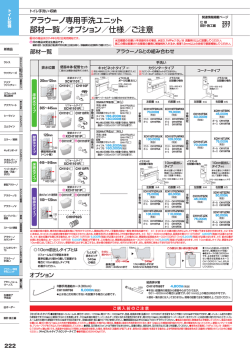
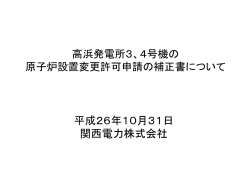
自動ステージ X軸リニアボールガイド:KXT04015/KXT06015 KXT04015-L KXT04015-R KXT06015-L ※写真はカバー位置Lの場合のイメージです。 穴位置・形状が実際の製品とは異なる場合があります。 40 32 3.5 32 40 φ12 4-Mφ3深4 32 65.5 59.5 65.5 59.5 φ12 40 32 40 32 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) 9.5 16 32 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) 5 30 30 5 7 14 14 7 32 32 XY 4 4 XY 20 24 X 24 20 X 4-Mφ3深4 自動直動 自動直動 3.5 16 9.5 KXT04015-L CADデータ 3D・2D CAD DATA 外形寸法図 Z Z 水平面Z 水平面Z XYZ XYZ KXT06015-L KXT06015-R ゴニオ ゴニオ 回転 回転 オプションコード KXT 04015-LC □ 勝手違い リニア ボール ※片端バラは反ステージ側です。 ケーブル詳細は、 P.1-199∼をご確認ください。 R 3 ケイベックス ユニット 4-Mφ4深4 50 9.5 20.5 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 20 24 30 30 50 50 60 φ12 20.5 7 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 50 4 F G H J 無記号 L 標準価格との 仕様 ケーブル型式 差額 ロボットケーブル2m D214-2-2R +¥8,000 ロボットケーブル2m片端バラ D214-2-2RK +¥8,000 ロボットケーブル4m D214-2-4R +¥11,000 ロボットケーブル4m片端バラ D214-2-4RK +¥11,000 ケーブル無し (標準) − − 14 コード 60 50 制御機器 14 3 ケーブルオプション L位置 65.5 59.5 65.5 59.5 φ12 ケーブル P.1-199∼ 電気仕様はP.1-019∼ 2 センサカバー位置 □40mm □60mm 04 06 3 4 1 ステージ面サイズ 2 60 50 4-Mφ4深4 60 50 1 50 制御機器 3 9.5 セレクトコード 24 20 7 型式 ユニット リニア ボール ケイベックス CAVE-X CAVE-X リニアボール 3 リニアボール 数量 1∼6 日目発送 目 目発 クロス ローラ メカ仕様 スライド ガイド 型式 (左右勝手違い) 移動量 ステージ面サイズ 送りねじ (ボールねじ) ガイド 主材質ー表面処理 自重 分解能 (パルス) MAXスピード 一方向位置決め精度 繰返し位置決め精度 耐荷重 モーメント剛性 ロストモーション 真直度 平行度 ピッチング/ヨーイング リミットセンサ 原点センサ 付属ねじ (六角穴付ボルト) 1台 価 2∼6台 格 7台∼ □40 □50 精度仕様 □60 □70 □80 □100 センサ □120 その他 1 017 SPEC KXT04015-LC KXT04015-RC KXT06015-LC KXT06015-RC クロス ローラ 15mm 40×40mm φ6リード1 リニアボールガイド スチールー無電解ニッケルメッキ処理 0.38kg ピッチ0.38/ヨー0.35/ロール0.21[″/N・cm] 30″以内/25″以内 M3ー8 4本 ¥69,000 ¥57,800 ¥56,000 2μm (Full) /1μm (Half) 10mm/sec 10μm以内 ±1μm以内 10kgf【98N】 2.5μm以内 10μm以内 20μm以内 有 有 60×60mm スライド ガイド 0.60kg □40 □50 □60 □70 ピッチ0.1/ヨー0.08/ロール0.05[″/N・cm] □80 □100 35″以内/30″以内 M4ー8 4本 ¥81,000 ¥67,800 ¥66,000 □120 その他 1 018 自動ステージ 電気仕様:KXT04015/KXT06015 電気仕様 KXTシリーズ推奨原点復帰方法 X KXT06015 5相ステッピングモータ 0.75A/相 オリエンタルモーター㈱ C005C-90215P 0.72゜ HR10A-10R-12PC (71) (ヒロセ電機㈱) HR10A-10P-12S (73) (ヒロセ電機㈱) 有 有 フォトマイクロセンサ EE-SX4134 (オムロン㈱) DC5∼24V ±10% 合計60mA以下 NPNオープンコレクタ出力 DC5∼24V 8mA以下 残留電圧0.3V以下 (負荷電流2mA時) 検出 (遮光) 時:出力トランジスタOFF(非導通) 出力論理 Z 水平面Z 当社の自動ステージは、 型式によってセンサの仕様が異なります。 そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 KXT04015 制御出力 XY 【タイプ3】CCW方向に検出を行い、ORG信号の XYZ CCWLS ゴニオ 9 3 8 F速度 L速度 SD 11 制御機器 7 4 12 5 6 モータリード モータリード モータリード モータリード モータリード CWLS出力 CCWLS出力 オープン 電源入力 (+) ORG出力 電源入力 (−) オープン 青 赤 橙 緑 黒 LD MOTOR リニア ボール CWLS Vin CCWリミット CWリミット 原点端面 開始位置3 SD L速度 F速度 L速度 SD L速度 JOG JOG 開始位置3 ※ JD ※ 水平面Z LD 開始位置4 JD CCWLS JOG 【タイプ9】タイプ3実行後、TIMING信号のCCW側 未検出(入光状態) CCWリミット 検出(遮光状態) 未検出(入光状態) 原点センサ(ORG1) 検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) CCW (モータ側) リニアボール 単位 [mm] 原点 ストローク 反 端面 中心 端面 タイプ4実行後、 TIMING信号のCW側 【タイプ10】 エッジの検出行程を行います。 ■ ドライバ P.1-197∼ DC24V系入力 型式 分割数 AC100V系入力 CRD5107P(¥23,000) 1∼1/250 (16段階) SD5107P3-A22(¥12,800) Full/Half 型式 分割数 RKD507-A(¥39,800) 1∼1/250 (16段階) CCW方向 入力電源 AC100-240V メカリミット CWリミット 原点端面 ストローク中心 反端面 CCWリミット メカリミット 原点復帰 7 6.2 0 1.5 3 9.2 10 ストローク中心 8.5 7.7 1.5 0 1.5 7.7 8.5 DC24V リニア ボール ケイベックス CAVE-X ■ コントローラ P.1-189∼ 座標基準 ※原点復帰はDS102/DS112シリーズのコントローラを用いて原点復帰タイプ4を行った場合。 ※座標は設計上の値です。実際には±0.5mm程度の寸法誤差が生じることがあります。 P.1-193∼ 適応ステッピングモータコントローラ CCW メカ リミット リミット CW方向 ユニット 適応ドライバ メカストッパ メカ CW リミット リミット ゴニオ 制御機器 JD GND 未検出(入光状態) 検出(遮光状態) 未検出(入光状態) 検出(遮光状態) 未検出(入光状態) 検出(遮光状態) CAVE-X XYZ ※実線は急停止設定時、 点線は減速停止設定時 の場合を表します。 回転 F速度 L速度 SD L速度 JOG Z JD F速度 L速度 F速度 L速度 SD L速度 XY SD L速度 開始位置1 F速度 L速度 SD L速度 開始位置4 Vout (反モータ側)CW ケイベックス スライド ガイド ※ ORG レギュレータ メカストッパ 原点センサ(ORG1) KXT 開始位置2 原点復帰シーケンス CCWリミット クロス ローラ 開始位置2 JOG エッジの検出行程を行います。 ストローク中心 反端面 開始位置1 X F速度 L速度 ※実線は急停止設定時、 点線は減速停止設定時 の場合を表します。 JD センサ基板 タイミングチャート CWリミット L速度 SD L速度 CWLS a点 <原点検出行程> ORG F速度 L速度 JOG ※ 1 2 3 4 5 6 7 8 9 10 11 12 回転 ユニット CCWLS CWLS a点 JD 10 2 エッジ (a点) の検出行程を行います。 <原点検出行程> ORG 結線図 1 【タイプ4】CW方向に検出を行い、ORG信号のCW側 CCW側エッジ (a点) の検出行程を行います。 ※1 モータ単体性能の詳細は P.1-205∼ ※2 型式は駿河精機独自の管理型式 ピン配列 自動直動 自動直動 ステージ型式 タイプ メーカ モータ (※1) 型式 (※2) ステップ角 型式 コネクタ 受側型式 リミットセンサ 原点センサ 型式 電源電圧 センサ 消費電流 リニアボール 汎用入出力ポート なし あり なし あり ドライバタイプ(分割数) ノーマル(Full/Half) マイクロステップ(1∼1/250[16段階]) DS102NR (¥130,000) DS102MS (¥155,000) DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) DS112NR (¥125,000) DS112MS (¥150,000) DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) クロス ローラ DS112/102 スライド ガイド 注意:タイミングチャート図はセンサのタイミングを示すもので、 出力信号論理を示すものではありません。 出力信号論理に関しましては、 電気仕様̶センサ̶出力論理に記載されている出力トランジスタのON/OFF表示をご参照ください。 □40 □40 □50 □50 □60 □60 □70 □70 □80 □80 □100 □100 □120 □120 その他 その他 1 019 1 020 自動ステージ 水平面Z軸ステージ:KHE04006/KHE06008 CAD DATA 外形寸法図 CADデータ 3D・2D 1 KHE04006 KHE04006 KHE06008 14.5 38.5 49 48 40 32 自動直動 自動直動 32 40 4-M3深6 12 65.8 6 ※写真はイメージです。穴位置・形状が 実際の製品とは異なる場合があります。 X 19 12 11 XY 49 60±3 X Z 3-3.5キリ通シφ6ザグリ (M3用ボルト穴) 水平面Z 32 4 XY Z 32 水平面Z XYZ XYZ KHE06008 ゴニオ ゴニオ 4-M4深6 回転 2 移動量 006 008 6mm 8mm 仕様 ロボットケーブル2m ロボットケーブル片端バラ2m ロボットケーブル4m ロボットケーブル片端バラ4m ケーブル無し (標準) 27 10 84.3 ケーブル型式 標準価格との差額(1軸分) D214-2-2R +¥8,000 D214-2-2RK +¥8,000 D214-2-4R +¥11,000 D214-2-4RK +¥11,000 − − ※オプション仕 様を選 択された場 合の価 格は標準 価格に差額を加算してください。 電 気仕 様 P.1-023∼ 8 リニア ボール 50 60 3 ケーブルオプション コード F G H J 無記号 制御機器 49 □40mm □60mm 04 06 ケーブル P.1-199∼ 電気仕様はP.1-023∼ 3 6 1 ステージ面サイズ 2 60±4 1 ユニット 51 KHE 04006-C□ 制御機器 回転 オプションコード 15 ユニット セレクトコード 66 60 50 型式 4-4.5キリ (M4用ボルト穴) ケイベックス 50 5 50 リニア ボール ケイベックス CAVE-X CAVE-X リニアボール リニアボール クロス ローラ 3 クロス ローラ 数量 1∼2 1∼6 日目発送 目 目発 スライド ガイド メカ仕様 型式 移動量 ステージ面サイズ 送りねじ (ボールねじ) ガイド 主材質ー表面処理 自重 分解能 (パルス) MAXスピード 位置決め精度 繰返し位置決め精度 耐荷重 ロストモーション 平行度 リミットセンサ 原点センサ 付属ねじ (六角穴付ボルト) 1台 価 格 2∼6台 7台∼ □40 □50 □60 精度仕様 □70 □80 □100 0.5kg 3kgf【29N】 その他 1 021 リニアボールガイド スチール−無電解ニッケルメッキ処理 2μm (Full) /1μm (Half) 10mm/sec − ±5μm以内 KHE06008-C 8mm 60×60mm φ8リード1 スライド ガイド □40 □50 0.92kg □60 □70 □80 4kgf【39N】 □100 5μm以内 80μm以内 有 有 センサ □120 SPEC KHE04006-C 6mm 40×40mm φ6リード1 M3ー16 3本 ¥111,000 ¥92,500 ¥90,000 □120 M4ー14 4本 ¥141,000 ¥117,500 ¥114,000 その他 1 022 自動ステージ 電気仕様:KHE04006/KHE06008 電気仕様 KHEシリーズ推奨原点復帰方法 X XY KHE04006 リミット出力論理 原点出力論理 Z 水平面Z 当社の自動ステージは、 型式によってセンサの仕様が異なります。 そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 KHE06008 5相ステッピングモータ 0.75A/相 オリエンタルモーター㈱ PK523HPB-C17 0.72゜ HR10A-10R-12PC (71) (ヒロセ電機㈱) HR10A-10P-12S (73) (ヒロセ電機㈱) 有 有 フォトマイクロセンサ EE-SX4134 (オムロン㈱) DC5∼24V ±10% 合計60mA以下 NPNオープンコレクタ出力 DC5∼24V 8mA以下 残留電圧0.3V以下(負荷電流2mA時) 検出 (遮光) 時:出力トランジスタOFF(非導通) 検出 (入光) 時:出力トランジスタON(導通) 制御出力 【タイプ3】CCW方向に検出を行い、ORG信号の CCWLS F速度 L速度 SD ユニット 10 3 8 7 4 12 5 6 開始位置2 開始位置2 ※ モータリード モータリード モータリード モータリード モータリード CWLS出力 CCWLS出力 オープン 電源入力 (+) ORG出力 電源入力 (−) オープン 青 赤 橙 緑 黒 MOTOR SD JOG ※ 開始位置3 レギュレータ F速度 L速度 SD L速度 F速度 L速度 SD L速度 JOG JOG JOG CAVE-X 未検出(入光状態) 検出(遮光状態) 原点センサ(ORG1) 検出(入光状態) 未検出(遮光状態) リニアボール CWリミット 【タイプ9】タイプ3実行後、TIMING信号のCCW側 ORG エッジの検出行程を行います。 KHE06008 □60 ゴニオ 回転 開始位置4 JD ユニット 制御機器 【タイプ10】タイプ4実行後、TIMING信号のCW側 エッジの検出行程を行います。 CCWLS 原点復帰シーケンス メカストッパ 未検出(入光状態) CCWリミット 検出(遮光状態) 検出(入光状態) 原点センサ(ORG1) 未検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) 未検出(入光状態) 検出(遮光状態) CCW (上昇側) (下降側) CW メカ メカ CW 原点 ストローク 反 CCW リミット リミット 端面 中心 端面 リミット リミット 単位 [mm] □50 XYZ JOG GND CCWリミット CWリミット □40 JD Vout メカストッパ ストローク中心 原点端面 KHE04006 ※実線は急停止設定時、 点線は減速停止設定時 の場合を表します。 P.1-193∼ ■ ドライバ P.1-197∼ 反端面 スライド ガイド 水平面Z LD JD DC24V系入力 クロス ローラ 開始位置3 ※ Z ※ 適応ドライバ CCWリミット ケイベックス JD F速度 L速度 SD L速度 F速度 L速度 SD L速度 CWLS Vin XY L速度 F速度 L速度 F速度 開始位置4 センサ基板 タイミングチャート リニア ボール 開始位置1 JOG ※実線は急停止設定時、 点線は減速停止設定時 の場合を表します。 JD 1 2 3 4 5 6 7 8 9 10 11 12 制御機器 11 開始位置1 X SD L速度 JD 結線図 9 L速度 SD L速度 CWLS a点 <原点検出行程> ORG F速度 L速度 L速度 ピン配列 2 CCWLS CWLS a点 XYZ 1 エッジ (a点) の検出行程を行います。 <原点検出行程> ORG ※1 モータ単体性能の詳細は P.1-025 ※2 型式は駿河精機独自の管理型式 回転 【タイプ4】CW方向に検出を行い、ORG信号のCW側 CCW側エッジ (a点) の検出行程を行います。 LD ゴニオ 自動直動 自動直動 ステージ型式 タイプ メーカ モータ (※1) 型式 (※2) ステップ角 型式 コネクタ 受側型式 リミットセンサ 原点センサ 型式 電源電圧 センサ 消費電流 型式 分割数 AC100V系入力 CRD5107P(¥23,000) 1∼1/250 (16段階) CCW方向 型式 分割数 RKD507-A(¥39,800) 1∼1/250 (16段階) 適応ステッピングモータコントローラ 入力電源 DC24V リニア ボール ケイベックス CAVE-X ■ コントローラ P.1-189∼ AC100-240V CW方向 SD5107P3-A22(¥12,800) Full/Half リニアボール 汎用入出力ポート なし あり なし あり ドライバタイプ(分割数) マイクロステップ(1∼1/250[16段階]) ノーマル(Full/Half) DS102NR (¥130,000) DS102MS (¥155,000) DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) DS112NR (¥125,000) DS112MS (¥150,000) DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) クロス ローラ DS112/102 座標基準 メカリミット CWリミット 原点 ストローク中心 反端面 CCWリミット メカリミット 原点復帰 3 2.2 0 1 2 4.2 5 ストローク中心 4 3.2 1 0 1 3.2 4 原点復帰 4 3.2 0 1 2 5.2 6 ストローク中心 □50 5 4.2 1 0 1 4.2 5 □60 スライド ガイド □40 ※原点復帰はDS102/DS112シリーズコントローラを用いて原点復帰タイプ4を行った場合。 ※座標は設計上の値です。実際には±0.5mm程度の寸法誤差が生じることがあります。 □70 □80 □70 □80 注意:タイミングチャート図はセンサのタイミングを示すもので、 出力信号論理を示すものではありません。 出力信号論理に関しましては、 電気仕様̶センサ̶出力論理に記載されている出力トランジスタのON/OFF表示を参照ください。 □100 □100 □120 □120 その他 その他 1 023 1 024 自動ステージ 回転ステージ:KRE04360/KRE06360 CADデータ 3D・2D 外形寸法図 KRE04360 KRE04360 KRE06360 40 16 49.5 φ12 55 ※写真はイメージです。穴位置・形状が 実際の製品とは異なる場合があります。 16 16 3-3.5キリ、 φ6 ザグリ (M3用ボルト穴) 55.5 16 自動回転 自動回転 5 X XY 3 XY 透過穴φ8 4-Mφ3深6 Z X Z φ39 水平面Z XYZ XYZ ゴニオ 14.5 20 30 28.5 水平面Z ゴニオ 回転 回転 型式 ユニット セレクトコード オプションコード ユニット KRE04360-C□ 制御機器 1 ケーブル P.1-199∼ 電気仕様はP.1-027∼ 2 KRE06360 制御機器 60 φ39mm φ60mm 04 06 2 ケーブルオプション コード F G H J 無記号 仕様 ロボットケーブル2m ロボットケーブル片端バラ2m ロボットケーブル4m ロボットケーブル片端バラ4m ケーブル無し (標準) 3-φ4.5 キリ (M4用ボルト穴) ケーブル型式 標準価格との差額(1軸分) D214-2-2R +¥8,000 D214-2-2RK +¥8,000 D214-2-4R +¥11,000 D214-2-4RK +¥11,000 − − 25 74 ※オプション仕様を選択された場合の価格は標準価格 に差額を加算してください。 電気仕様 P.1-027∼ ボール ねじ φ12 25 ボール ねじ 25 25 1 ステージ面サイズ 45.5 39.5 ウォーム ギヤ 透過穴φ16 4-Mφ4深6 3 ウォーム ギヤ φ60 3 数量 1∼2 1∼6 メカ仕様 φ39 φ40 φ59 精度仕様 φ60 φ75 φ100 0.36kg 0.007999° (Full) 40° /sec センサ φ180 φ39mm ウォームギヤ (減速比1/90) その他 1 025 M3ー25 3本 ¥99,000 ¥82,800 ¥80,000 KRE06360-C 360° 深溝玉軸受け アルミ−黒アルマイト処理 0.1° 以内 ±0.05° 以内 3kgf【29.4N】 0.1° 以内 50μm以内 ― 有 φ60mm ウォームギヤ (減速比1/120) 14.5 移動量 ステージ面サイズ 移動機構 (減速比) ガイド 主材質―表面処理 自重 分解能 (パルス) MAXスピード 位置決め精度 繰返し位置決め精度 耐荷重 ロストモーション 平行度 リミットセンサ 原点センサ 付属ねじ (六角穴付ボルト) 1台 価 2∼6台 格 7台∼ SPEC KRE04360-C ダイレクト ドライブ 6 型式 30 ダイレクト ドライブ 28.5 日目発送 目 目発 φ39 φ40 0.50kg 0.006° (Full) 30° /sec φ59 φ60 φ75 φ100 φ180 M4ー12 3本 ¥105,000 ¥87,800 ¥85,000 その他 1 026 自動ステージ 電気仕様:KRE04360/KRE06360 電気仕様 KREシリーズ推奨原点復帰方法 X KRE04360 KRE06360 5相ステッピングモータ 0.75A/相 オリエンタルモーター㈱ C005C-90215P 0.72゜ HR10A-10R-12PC (71) (ヒロセ電機㈱) HR10A-10P-12S (73) (ヒロセ電機㈱) 有 フォトマイクロセンサ EE-SX4134(オムロン㈱) DC5∼24V ±10% 35mA以下 NPNオープンコレクタ出力 DC5∼24V 8mA以下 残留電圧0.3V以下(負荷電流2mA時) 検出 (遮光) 時:出力トランジスタOFF(非導通) 制御出力 XY 出力論理 当社の自動ステージは、型式によってセンサの仕様が異なります。 そのため、 推奨以外の原点復帰方法では正しく動作しない場合があります。 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 【タイプ3】CCW方向に検出を行い、ORG信号の ※ 回転 ユニット 2 9 3 8 制御機器 11 7 4 12 5 6 モータリード モータリード モータリード モータリード モータリード オープン オープン オープン 電源入力 (+) ORG出力 電源入力 (−) オープン 原点検出目盛位置 [° ] KRE06360 ウォーム ギヤ ( 0 原点端面:遮光板のCCW側エッジ) ( 6 反端面:遮光板のCW側エッジ) ( 0 原点端面:遮光板のCCW側エッジ) ( 4 反端面:遮光板のCW側エッジ) ※原点復帰はDS102/DS112シリーズコントローラを用いて原点復帰タイプ4を行った場合。 ※座標は設計上の値です。実際には±0.5° 程度の寸法誤差が生じることがあります。 ダイレクト ドライブ 開始位置3 SD L速度 開始位置1 SD JOG F速度 L速度 SD L速度 F速度 L速度 SD L速度 JOG JOG L速度 XY 開始位置3 ※ ※ Z LD ※実線は急停止設定時、 点線は減速停止設定時 の場合を表します。 JD F速度 L速度 SD L速度 JOG X JD F速度 L速度 F速度 L速度 SD L速度 センサ基板 回転 JD ユニット JOG 【タイプ9】タイプ3実行後、TIMING信号のCCW側 Vin XYZ ゴニオ JD エッジの検出行程を行います。 レギュレータ 水平面Z 開始位置4 ORG 【タイプ10】タイプ4実行後、TIMING信号のCW側 制御機器 エッジの検出行程を行います。 原点復帰シーケンス Vout P.1-193∼ GND 適応ドライバ ■ ドライバ P.1-197∼ DC24V系入力 型式 分割数 単位 [° ] KRE04360 ※ 開始位置4 MOTOR ※DS102/DS112コントローラを使用する場合、 センサ論理を以下のように設定してください。 ・リミットセンサ論理:A (N.O.) ・原点センサ論理: ( B N.C.) タイミングチャート ボール ねじ 青 赤 橙 緑 黒 開始位置2 F速度 L速度 ※実線は急停止設定時、 点線は減速停止設定時 の場合を表します。 JD 1 2 3 4 5 6 7 8 9 10 11 12 開始位置2 JOG 結線図 10 開始位置1 L速度 SD L速度 CWLS a点 <原点検出行程> ORG F速度 L速度 JD XYZ 1 CCWLS L速度 SD LD ピン配列 a点 F速度 水平面Z ゴニオ エッジ (a点) の検出行程を行います。 CWLS <原点検出行程> ORG ※1 モータ単体性能の詳細は P.1-205∼ ※2 型式は駿河精機独自の管理型式 Z 【タイプ4】CW方向に検出を行い、ORG信号のCW側 CCW側エッジ (a点) の検出行程を行います。 CCWLS 自動回転 自動回転 ステージ型式 タイプ メーカ モータ (※1) 型式 (※2) ステップ角 型式 コネクタ 受側型式 原点センサ 型式 電源電圧 センサ 消費電流 AC100V系入力 CRD5107P(¥23,000) 1∼1/250 (16段階) SD5107P3-A22(¥12,800) Full/Half 型式 分割数 RKD507-A(¥39,800) 1∼1/250 (16段階) 適応ステッピングモータコントローラ ボール ねじ ■ コントローラ P.1-189∼ 入力電源 AC100-240V DC24V 汎用入出力ポート なし あり なし あり ドライバタイプ(分割数) マイクロステップ(1∼1/250[16段階]) ノーマル(Full/Half) DS102NR (¥130,000) DS102MS (¥155,000) DS102NR-IO (¥140,000) DS102MS-IO (¥165,000) DS112NR (¥125,000) DS112MS (¥150,000) DS112NR-IO (¥135,000) DS112MS-IO (¥160,000) ウォーム ギヤ DS112/102 ダイレクト ドライブ φ39 φ39 φ40 φ40 φ59 φ59 φ60 φ60 φ75 φ75 φ100 φ100 φ180 φ180 その他 その他 1 027 1 028
© Copyright 2026 Paperzz