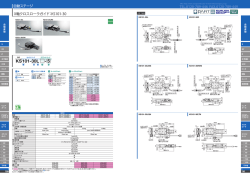
自動ステージ 自動ゴニオステージ ガイダンス テーブル面の中央垂線上に回転中心を持つ円弧駆動のステージ です。 ―用途 ・光ピックアップ調整・検査装置で微小角位置決めを繰返す用途 ・組立て、実装工程での、部品の姿勢補正用途 ・カメラレンズや携帯電話用液晶パネル等の張り合わせ用途など生 産・検査ラインで幅広くご使用いただけます。 選定POINT ボールネジタイプ KGB07/KAB07 サインモーションステージ 1-3003 微小角度を繰返し駆動させるのに最適なボールねじ駆動の高精度ゴニオステージ。 Original ウォームギヤタイプの摺動運動に対し、転がり運動のサインモーションステージは、繰返し駆動 を続けても磨耗しにくく、耐久性が向上します。 ステージサイズ 70×70mm KG/KA/KGW/KAW ウォームタイプ 1-3007 移動ガイドにクロスローラ、機構にウォームギヤを採用した高精度ゴニオステージ。 豊富なサイズ展開と、 ワークディスタンス (回転中心高さ) で、最適なステージをご選定いただけ ます。 ステージサイズ 40×40mm 50×50mm 60×60mm 70×70mm ■センサ改良 センサ電圧電源がDC5VのみだったKS501/KS521シリーズを廃止し、DC5V∼24V対応のKGW/KAWシリーズをラインナップ。 より使いやすく、選びやすくなりました。 ■回転中心高さ一覧表 ・各ステージサイズの回転中心高さを示しています。 ・青色の回転中心マークは、2軸構成が可能な高さです。 120 90 86 60 60 68 40 50 回転中心 125 122 100 96 75 70 50 30 0 単軸 2軸 単軸・ ・ ・ ・ 2 軸・ ・ ・ ・ + ステージ面サイズ 40×40 50×50 60×60 70×70 ボールネジタイプ − − − ○ ウォームタイプ ○ ○ ○ ○ 駿河精機OST事業部カスタマーサービス サインモーションゴニオステージ(ボールねじタイプ) ボールねじを使用した高精度ゴニオステージ。微小角度を繰返し駆動させる用途に最適です。 サインモーションゴニオステージの特長 ■高耐久仕様 微小角度で繰返し駆動を続けると、 ウォームギヤタイプでは磨耗によるバックラッシが懸念されて おりました。 移動機構をウォームギヤ【摺動】から ボールねじ 【転がり】にすることで、 「高耐久性」を実現します。 ■加減速性能の向上 ウォームギヤに比べて摩擦(摺動抵抗)が小さいため、 スムーズな立ち上がり・加速が可能です。 ■バックラッシ低減 機構要素に予圧部品を用いることで、 「バックラッシ ほぼゼロ」を実現します。 ■移動量、等速性について ボールねじの直線駆動をステージ内部のベアリングにより回転運動へ変換しております。 (直線運動を、回転運動に変換している為、ボールねじ移動距離とステージ移動角度は同一 になりません。) この為、 ストロークセンターとストロークエンドでは1パルスあたりの分解能が異なります。 等速でパルス信号を送っても回転速度は一定になりません。 P ■移動量計算方式 *ストロークセンターを基準にした計算式です。 ①移動角度=arcSin((入力パルス*X)/P)②入力パルス=P*Sin(移動角度)/X ■定義 P=支点間距離 (回転中心軸とベアリングとの距離) ■基本SPEC 定義 支点間距離 P ※ ボールねじリード モータ基本ステップ角 1パルスのボールねじ移動量 X 値 76 1 0.72 0.002 単位 mm mm 度 mm 型式 KGB07-W70 KGB07-W96 KGB07-W122 モータ基本ステップ角 0.72° 0.72° 0.72° 支点間距離P 76mm 102mm 128mm ※支点間距離はステージにより異なります。 正しくお使いいただくために ▽取付け方法 ▽ステージ上面・下面に取付ける対象物について 平面度の粗い対象物を取付けたり、平面度の粗い物に取付けますと、 ステージ面 を変形させ、精度に影響を及ぼす場合がございます。 ご注意ください。 【平面度の目安:10μm以内】 ▽ステージの取付け姿勢について 上面プレートをCWまたはCCW側にストロークさせ ると、2箇所ずつボルト穴がのぞきます(計4箇所)。 サインモーションステージはコントローラで駆動させ ると、 リミットセンサが感知 し、取付穴を確保できま せん。必ず手動にて取付穴を出し、付属ねじで固定 してください。 各製品のSPECは平面に設置したときを条件としております。 天地逆転取付けや、側面垂直または側面水平取付けなど平面設置以外でご使用 の場合は注意が必要です。 耐荷重や精度はその取付け姿勢により大きく変ってきます。 使用可否については、下記の製品別姿勢特性表を目安としてください。 使用条件に応じて最適な機構の製品、 ご使用方法をご案内いたしますのでお気軽 にご相談ください。 ▼製品別姿勢特性表 天地逆転使用 側面水平使用 側面垂直使用 クロスローラ【ボールねじ】 ○ ○ ○ クロスローラ【ウォームギヤ】 ○ ○ ○ 移動ガイド【送り方式】 天地逆転取付け ○ 荷重やモーメントに制限があるが、使用は可能 △ 荷重やモーメントに制限があり、一部の機構又は使い方により、性能を著しく損なう可能性あり × 使用不可 側面垂直取付け 回転中心振れ精度・回転中心高さについて 当社のクロスローラゴニオステージは、回転中心振れが非常に小さく、高精度です。 ▽回転中心振れ精度 回転中心(設計理論上で無く、実際の回転中心)高さに真円球を置き、フルストロークさせたときの真円球の振れ量(X.Y.Z) を、回転中心 振れ精度としています。 ▽回転中心高さ (ワークディスタンス) 回転中心高さは、 ステージ上面から真円球中心までの高さになります。 自動ステージ Original サインモーションゴニオステージ:KGB07/KAB07シリーズ ボールねじを使用した高精度ゴニオステージです。微小角度を、繰返し駆動させる用途に最適です。 勝手違い センサ論理オプション ■2軸の組合せ構成について 自 動 ゴ ニ オ 回転中心の異なる1軸ステージの組合せです。スペック表で隣に表記されているステージと組合せ回転中心を同一に構成してあります。 サインモーションシリーズはガイド・ボールねじ部にクリーングリス (AFF) を使用しています。 ■1軸 ■2軸 ■KGB07シリーズ ■KAB07シリーズ ケーブル別売 別売 X ケーブルは付属しません。 ケーブルオプションより お選びください。 XY Z ケーブル 1-6015∼ 水平面Z KGB07070AL 型 式 KAB07070AL オプションコード XYZ K G B 0 7 0 7 0□ □ - □ ゴニオ 回転 センサカバー位置仕様 コード L R ユニット 制御機器 軸 G A 1軸 2軸 回転中心高さ(W.D) 070 70mm 096 96mm 122 122mm ※KAB07はW.D70、96mmのみ 仕様 L位置 勝手違い センサー論理 Type CWLS ORG1 CCWLS ORG2 A NC NC NC B NO NO NO NO C NC NC NO 電気仕様 1-3005 グリース交換 11-019 ケーブルオプション 標準価格との差額 1軸分 2軸分 コード 仕 様 + ¥5,000 A 2m + ¥10,000 + ¥5,000 B 片端バラ 2m + ¥10,000 + ¥6,000 C 4m + ¥12,000 + ¥6,000 D 片端バラ 4m + ¥12,000 コネクタのみ(ケーブルなし) + ¥1,800 E + ¥3,600 ロボットケーブル2m + ¥8,000 F + ¥16,000 ロボットケーブル片端バラ2m + ¥8,000 G + ¥16,000 ロボットケーブル4m + ¥11,000 H + ¥22,000 ロボットケーブル片端バラ4m + ¥11,000 J + ¥22,000 無記号 なし + ¥0 + ¥0 ※片端バラは反ステージ側です。 ※オプション仕様を選択された場合の価格は標準価格に差額を 加算して下さい。 型式変更 ボール ねじ 従来品の型式を変更させて頂きました(仕様変更はありません)。 1軸 ・KGB07-W070A →KGB07070AL-A ・KGB07-W096A →KGB07096AL-A ・KGB07-W122A →KGB07122AL-A 2軸 ・KAB07-W070A →KAB07070AL-A ・KAB07-W096A →KAB07096AL-A (勝手違いも同様) 3 日目 発送 数量 1∼3 ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 S P E C 1軸 2軸 軸数 型式 KGB07070AL KAB07096AL KGB07122AL KAB07070AL KGB07096AL (勝手違い) KGB07070AR KAB07096AR KGB07122AR KAB07070AR KGB07096AR 移動量 上軸/下軸 ±5° ±4° /±3° ±3° ±5° /±4° ±4° ステージ面サイ ズ 70×70mm メ ボールネジ φ6 リード1 カ 移動機構 仕 ガイド クロスローラガイド 様 ステージ材質 アルミ−白アルマイト処理 自重 0.7kg 1.4kg 寸 ステージ高さ 26±0.2mm 52±0.4mm 法 70±0.2mm 96±0.2mm 122±0.2mm 70±0.4mm 96±0.4mm 公 回転中心高さ 差 回転中心振れ精度 0.01mm以内 ― 0.0015° Full時 上側 0.0011° 0.0015° 0.0011° 0.0009° 分解能(パルス) Full時 下側 0.0011° 0.0009° 23° /sec[15kHz] 上側 17° /sec[15kHz] 精 MAXスピード 23° /sec[15kHz] 17° /sec[15kHz] 13° /sec[15kHz] 17° /sec[15kHz] 下側 13° /sec[15kHz] 度 仕 繰返位置決め精度 ±0.003° 以内 様 耐荷重 5kgf【49N】 4kgf【39.2N】 モーメント剛性 ピッチ0.28/ヨー0.06/ロール0.06[″ /N・cm] ピッチ0.34/ヨー0.12/ロール0.34[″ /N・cm] 0.003° 以内 ロストモーション 有 セ リミットセンサ 有 ン 原点センサ サ 近接原点センサ 有 ¥165,000 ¥330,000 価格 ※MAXスピードは、 フルストロークの移動パルスに対して15kHz駆動時の理論速度となります。 駿河精機OST事業部カスタマーサービス CAD DATA 外形寸法図〔1軸〕 ■KGB07-Lシリーズ 149.5 70 60 40 30 10.5 4 自 動 ゴ ニ オ 17 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 69 63 4-M4深5 回転中心 8-M3深4 φ12 70 60 40 30 φ13 □60 ツマミ 回転中心 X 5 5 5 14 28 3 3 14 28 26 9 3 14 28 26 9 目盛0.5゜ バーニア0.05゜ 目盛1゜ バーニア0.1゜ 目盛1゜ バーニア0.1゜ 26 9 70 96 122 回転中心 KGB07070AL KGB07096AL KGB07122AL XY Z ■KGB07-Rシリーズ 水平面Z 149.5 70 60 40 30 10.5 XYZ 4 17 69 63 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) ゴニオ φ13 9 26 5 5 3 制御機器 目盛0.5゜ バーニア0.05゜ 目盛1゜ バーニア0.1゜ 5 KGB07070AR 28 2.5 14 96 122 ユニット 28 14 9 26 目盛1゜ バーニア0.1゜ 28 14 3 回転中心 8-M3深4 回転中心 9 26 4-M4深5 回転 回転中心 70 φ12 30 40 60 70 □60 ツマミ KGB07096AR KGB07122AR ボール ねじ 外形寸法図〔2軸〕 70 60 40 30 17 10.5 149.5 ■KAB07-Rシリーズ 69 63 70 60 40 30 10.5 ツマミ 156 8-M3深4 63 69 69 63 4-M4深5 φ12 ウォーム ギヤ φ13 φ12 4-M4深5 φ12 □ 40 回転中心 回転中心 回転中心 □ 50 70 96 70 回転中心 96 8-M3深4 φ12 30 40 60 70 70 60 40 30 φ13 ツマミ □ 60 KAB07070AL KAB07096AL □60 KAB07070AR 4 26 35 52 28 14 14 28 52 35 26 4 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 5 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 4 26 35 52 5 28 14 □60 5 14 28 52 35 26 4 □ 70 5 156 149.5 69 63 17 ■KAB07-Lシリーズ □ 80 □ 100 □ 120 KAB07096AR その他 自動ステージ 電気仕様・オプション KGB07/KAB07 電気仕様 型式 勝手違い 自 動 ゴ ニ オ モータ (※1) コネクタ KGB07070AL KGB07070AR KGB07096AL KGB07122AL KGB07096AR KGB07122AR 5相ステッピングモータ 0.75A/相 (オリエンタルモーター㈱) C005C-90215P(□28mm)駿河精機管理型式 0.72° HR10A-10J-12P(73) (ヒロセ電機㈱) HR10A-10P-12S(73) (ヒロセ電機㈱) 有 有 有 フォトマイクロセンサ:EE-SX398(オムロン㈱) 、EE-SX498(オムロン㈱) :リミット、原点センサ フォトマイクロセンサ:PM-F24(勝手違いPM-R24) (サンクス㈱) :スリット原点センサ DC5∼24V ±10% 100mA以下 EE-SX398、EE-SX498:NPNオープンコレクタ出力 DC5V∼24V 16mA以下 残留電圧0.4V以下 (負荷電流16mA時) PM-F24(勝手違いPM-R24) :NPNオープンコレクタ出力 DC30V以下 50mA以下 残留電圧0.4V以下 (負荷電流16mA時) 残留電圧0.7V以下 (負荷電流50mA時) EE-SX398:検出(遮光)時出力トランジスタON(導通) EE-SX498:検出(遮光)時出力トランジスタOFF(非導通) PM-F24(R24) :検出(入光)時出力トランジスタON(導通) タイプ 型式 ステップ角 型式 受側適合コネクタ リミットセンサ 原点センサ(ORG1) スリット原点センサ(ORG2) 型式 X センサ 電源電圧 消費電流 XY 制御出力 Z 水平面Z XYZ 出力論理 ※1 モータ単体性能の詳細は 1-6021 ゴニオ ピン配列 回転 1 ユニット 結線図 1 2 3 4 5 6 7 8 9 10 11 12 10 2 9 3 8 制御機器 11 7 4 12 5 6 モータリード モータリード モータリード モータリード モータリード CWLS出力 CCWLS出力 ORG2出力 電源入力(+) ORG1出力 電源入力(−) F.G 青 赤 橙 緑 黒 □70ゴニオセンサ論理 MOTOR レギュレータ 基板 CWLS/ CCWLS/ ORG1 (センサ基板) Type CWLS NC A EE-SX498 NO B EE-SX398 NC C EE-SX498 ORG1 NC EE-SX498 NO EE-SX398 NO EE-SX398 CCWLS ORG2 NC EE-SX498 NO NO PM-F24 EE-SX398 勝手違い PM-R24 NC EE-SX498 ※上段:センサ論理 下段:使用センサ ORG2 ※破線部は標準ケーブルを使用した場合、機能しません。 ボール ねじ 内蔵センサに関して ■KGBシリーズは下図のように センサを内蔵しています。 ■このステージに標準で付属するケーブル(D214-2-2E)を用いて、 当社のコントローラに接続した場合の結線図は以下のようになります。 コントローラ リミットセンサ(CCWLS) 標準ケーブル KGB自動ステージ 原点センサ(ORG1) リミットセンサ (CWLS) ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 スリット原点センサ (ORG2) コントローラ側端子機能 A C モータ E G J CWLS入力 L CCWLS入力 M NORG入力 N ORG入力 O センサ電源(DC5V(+)) P センサ電源(DC5V(−)) R 電磁ブレーキ電源(DC24V(+)) S 電磁ブレーキ電源(DC24V(−)) T U F.G A C E G J L M N O P R S T U 1 2 3 4 5 6 7 8 9 10 11 12 ステージ側端子機能 1 2 3 モータ 4 5 6 CWLS出力 7 CCWLS出力 8 ORG2出力 9 電源入力(+) 10 ORG1出力 11 電源入力(−) 12 F.G 自動ステージ側のCWLS(6番ピン)とCCWLS(7番ピン)は、通常どおりコントローラのCWLS(L番ピン)とCCWLS(M番ピン)につながり ますが、自動ステージ側のORG2出力(8番ピン)はDC5V(−)に接続され、ORG1出力(10番ピン)はORGと接続してしまいます。つまりこ の結線ではORG2のセンサは機能せず、 ORG1のセンサのみが原点信号としてコントローラに識別されます。結果として、 3個のセンサ(CWLS、 CCWLS、ORG) しか持たない自動ステージと同じ機能となり、原点復帰方法もスリット原点センサを用いない方法で行う必要があります。 ●スリット原点センサ(ORG2)対応ケーブルをご用意いたしました! ※詳細は 1-6015∼をご覧ください。 当シリーズは内部に4個のセンサを標準装備しております。スリット原点センサ(ORG2)を使い、4センサでご使用になる場合は、 『4センサ対 応ケーブル』が必要となります。また、推奨原点復帰方法もタイプが異なりますので、 ご注意ください。 ご注文の型式は「ケーブルコード:5(ケーブルなし)」を選び、4センサ対応ケーブル( 1-6015∼)をご指定ください。 駿河精機OST事業部カスタマーサービス タイミングチャート S S…原点のスリット (検出)間隔 未検出(遮光状態) スリット原点(ORG2) 検出(入光状態) 未検出(遮光状態) スリット原点(ORG2) 検出(入光状態) メカストッパ メカストッパ 未検出(入光状態) CCWリミット 検出(遮光状態) 原点センサ(ORG1)未検出(入光状態) 検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) 未検出(入光状態) CCWリミット 検出(遮光状態) 未検出(入光状態) 原点センサ(ORG1) 検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) (反モータ側)CW スリット原点センサ(ORG2) 反端面 原点端面 CCWリミット 自 動 ゴ ニ オ スリット遮光板 CWリミット 原点センサ(ORG1) CCW(モータ側) メカ CW 原点 リミット リミット 端面 反 CCW メカ 端面 リミット リミット X XY 単位[deg] CW方向 原点スリット(検出)間隔S CWリミット 座標基準 KGB07070A 0.8 5.3 原点復帰 KGB07096A 0.6 4.2 原点復帰 KGB07122A 0.5 3.2 原点復帰 ※原点復帰はDS102/112シリーズコントローラを用いて原点復帰タイプ4を行った場合 ※座標は設計上の値です。実際には±0.5[deg]程度の寸法誤差が生じることがあります。 CCW方向 反端面 2.1 1.5 1.3 原点 0 0 0 CCWリミット 5.3 4.2 3.2 Z 水平面Z XYZ ゴニオ 原点復帰方法 当社の自動ステージは、型式によってセンサの有無や結線方法が異なります。そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 回転 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 ユニット ■KGB07/KAB07推奨原点復帰方法 原点復帰シーケンス 1-6007∼ 制御機器 タイプ 3:CCW方向に検出を行い、 ORG信号のCCW側エッジの検出工程を行います。 タイプ 4:CW方向に検出を行い、 ORG信号のCW側エッジの検出工程を行います。 タイプ 9:タイプ3実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ10:タイプ4実行後、TIMING信号のCW側エッジの検出工程を行います。 ●スリット原点センサ(ORG2)対応ケーブルをご用意いたしました! ※この場合、原点復帰方法は以下からお選びください。 はじめにNORG信号のCW側エッジの検出工程を行い、次にORG信号のCCW側エッジの検出工程を行います。 タイプ1 CCW方向に検出を行い、 はじめにNORG信号のCCW側エッジの検出工程を行い、次にORG信号のCW側エッジの検出工程を行います。 タイプ2 CW方向に検出を行い、 タイプ7 タイプ1実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ8 タイプ2実行後、TIMING信号のCW側エッジの検出工程を行います。 ボール ねじ 適応ドライバ・ドライバパック ■ドライバ 1-6013∼ AC100V系入力 DC24V系入力 型式 CRD5107P(¥23,000) SD5107P2-A3(¥12,800) 型式 RKD507-A(¥39,800) 分割数 1∼1/250(16段階) Full/Half 分割数 1∼1/250(16段階) ■ドライバパック 入力電源 1-6011 ※薄型タイプDP112シリーズの接続は専用ケーブルとなります。 筐体タイプ DC24V ウォーム ギヤ ドライバタイプ Full/Half 1∼1/250(16段階) 標準 DP102 (¥48,000) DP102MS (¥78,000) 薄型 DP112 (¥50,000) DP112MS (¥80,000) DP102/112 □ 40 □ 50 適応ステッピングモータコントローラ ■ □ 60 コントローラ 1-6003 入力電源 AC100-240V DC24V □ 70 汎用入出力ポート ドライバタイプ Full/Half 1∼1/250(16段階) なし DS102NR (¥130,000) DS102MS (¥155,000) あり DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) なし DS112NR (¥125,000) DS112MS (¥150,000) あり DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) □ 80 □ 100 □ 120 その他 DS102/112 自動ステージ ゴニオステージ:KGW04040/KGW04060/KAW04040 勝手違い 移動ガイドにクロスローラ、機構にウォームギヤを採用した高精度ゴニオステージです。 ■2軸の組合せ構成について 自 動 ゴ ニ オ 回転中心の異なる1軸ステージの組合せです。スペック表で隣に表記されているステージと組合せ回転中心を同一に構成してあります。 ■1軸 ■2軸 ■KGW04シリーズ ■KAW04シリーズ 規 格 変 更 センサ DC5V∼24V対応 1-3009 ケーブル別売 別売 X XY ケーブルは付属しません。 ケーブルオプションより お選びください。 Z KGW04040 KAW04040 水平面Z 型 式 オプションコード 電気仕様 XYZ K G W0 4 0 4 0 -□ □ ゴニオ 回転 センサカバー位置仕様 コード L R ユニット 制御機器 軸 G A 1軸 2軸 ステージ面サイズ 04 □40mm ケーブル 1-6015∼ 仕 様 L位置 勝手違い 回転中心高さ(W.D) 040 40mm 060 60mm ※2軸[A]は040のみ 1-3009 ケーブルオプション 標準価格との差額 1軸分 2軸分 コード 仕 様 + ¥5,000 A 2m + ¥10,000 + ¥5,000 B 片端バラ 2m + ¥10,000 + ¥6,000 C 4m + ¥12,000 + ¥6,000 D 片端バラ 4m + ¥12,000 コネクタのみ(ケーブルなし) + ¥1,800 E + ¥3,600 ロボットケーブル2m + ¥8,000 F + ¥16,000 ロボットケーブル片端バラ2m + ¥8,000 G + ¥16,000 ロボットケーブル4m + ¥11,000 H + ¥22,000 ロボットケーブル片端バラ4m + ¥11,000 J + ¥22,000 無記号 なし + ¥0 + ¥0 ※片端バラは反ステージ側です。 ※オプション仕様を選択された場合の価格は標準価格に差額を 加算して下さい。 選択例 ご希望の仕様 価 格 3 軸数 1軸 ¥137,000 + 回転中心 センサカバー 高さ (W.D) 位置 60mm + L位置 ― +¥0 付属ケーブル + なし +¥0 △ ボール ねじ KGW04060 ¥137,000 日目 発送 数量 1∼3 ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 S P E C 軸数 型式 (勝手違い) 移動量 上軸/下軸 ステージ面サイ ズ メ カ 移動機構 仕 ガイド 様 ステージ材質 自重 寸 ステージ高さ 法 公 回転中心高さ 差 回転中心振れ精度 分解能/パルス 上側 精 MAXスピード 下側 度 繰返位置決め精度 仕 様 耐荷重 モーメント剛性 ロストモーション セ リミットセンサ ン 原点センサ サ 近接原点センサ 価格 1軸 2軸 KGW04040-L KGW04040-R ±8° 40±0.2mm KGW04060-L KGW04060-R ±6° 40×40mm ウォームギヤ(1/240) クロスローラガイド アルミ−黒アルマイト処理、真鍮黒染め 0.4kg 20±0.2mm 60±0.2mm 0.01mm以内 0.003° (Full) KAW04040-L KAW04040-R ±8° /±6° 0.8kg 40±0.4mm 40±0.4mm ― 15° /sec[5kHz] ±0.005° 以内 3kgf【29.4N】 ピッチ1.30/ヨー1.16/ロール0.27[″ /N・cm] 0.01° 以内 有 有 − ¥137,000 2.5kgf【24.5N】 ピッチ1.57/ヨー2.32/ロール1.57[″/N・cm] ¥274,000 駿河精機OST事業部カスタマーサービス CAD DATA 外形寸法図〔1軸〕 116.8 ■KGW04-Lシリーズ 9.8 3 φ12 自 動 ゴ ニ オ 20 φ12 40 32 32 13 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) 67 61 40 32 20 ツマミ φ4(H7)深4 裏ヨリφ4(H7)深3 4-M3深4 4-M2深4 回転中心 回転中心 60 目盛1° バーニア0.1° 4.5 9.5 32 28 14 20 28 14 20 5.5 8.5 X 3.5 2.5 40 目盛1° バーニア0.1° XY 32 KGW04040-L Z KGW04060-L 水平面Z ■KGW04-Rシリーズ 116.8 67 61 XYZ 9.8 40 32 20 ゴニオ 3 回転 32 32 40 20 φ12 φ12 13 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) ユニット ツマミ 4-M3深4 φ4(H7)深4 裏ヨリφ4(H7)深3 4-M2深4 制御機器 回転中心 回転中心 20 4.5 32 9.5 3.5 28 5.5 14 8.5 40 20 2.5 14 28 60 目盛1° バーニア0.1° 目盛1° バーニア0.1° 32 ボール ねじ KGW04060-R KGW04040-R 外形寸法図〔2軸〕 ■KAW04040-L ■KAW04040-R 116.8 116.8 9.8 67 61 67 61 40 32 20 9.8 φ4(H7)深4 裏ヨリφ4(H7)深3 ツマミ 4-M3深4 φ12 20 32 40 4-M3深4 4-M2深4 67 61 61 67 4-M2深4 ウォーム ギヤ 120 120 ツマミ φ12 40 32 20 φ12 φ12 13 13 φ4(H7)深4 裏ヨリφ4(H7)深3 40 32 20 □ 40 □ 50 □ 60 □ 70 回転中心 2.5 40 40 2.5 回転中心 □ 80 4-3.5キリφ6ザグリ (M3用ボルト穴) 20 28.5 40 □32 4.5 4-3.5キリφ6ザグリ (M3用ボルト穴) 3 9.5 □32 28 14 14 28 9.5 3 4.5 40 28.5 20 □ 100 □ 120 その他 自動ステージ 電気仕様:KGW04/KAW04 電気仕様 自 動 ゴ ニ オ 型式 勝手違い モータ (※1) コネクタ センサ X タイプ 型式 ステップ角 型式 受側適合コネクタ リミットセンサ 原点センサ 近接原点センサ 型式 電源電圧 消費電流 制御出力 XY Z 出力論理 ※1 モータ単体性能の詳細 1-6021 センサDC5V∼24V対応になりました 水平面Z XYZ ゴニオ このステージはDC5V∼24V対応センサを搭載しています 24V対応センサアンプ基板K-PCBA24は不要です 当社のコントローラを使わずに、 モーションコントロールボードやプログラマブルロジックコントローラ(PLC) を用いて従来製品を動作させようとした場合、直接制御 機器に接続できず、K-PCBA24が必要でした。 ご注意ください 回転 従来のKS501-40,-60とセンサアンプ基板(K-PCBA24) をご使用頂いているお客様で、 ステージをKGW04,06に置き換える場合は、 センサアンプ基板を 使用しないで配線して頂く必要があります。 センサアンプ基板を使用した既存のケーブルを活かすために、 センサアンプ基板の入出力コネクタ間をジャンパするハーネスもご用意しております。詳細は お問合せ下さい。 ユニット 制御機器 ピン配列 ボール ねじ KGW04040-L KGW04060-L KGW04040-R KGW04060-R 5相ステッピングモータ 0.75A/相(オリエンタルモーター㈱) C005C-90215P(□28mm)駿河精機管理型式 0.72° HR10A-10J-12P(73) (ヒロセ電機㈱) HR10A-10P-12S(73) (ヒロセ電機㈱) 有 有 − フォトマイクロセンサ EE-SX4134(オムロン㈱) DC5∼24V ±10% 合計60mA以下 NPNオープンコレクタ出力 DC5∼24V 8mA以下 残留電圧0.3V以下(負荷電流2mA時) 検出(遮光)時:出力トランジスタOFF(非導通) 結線図 1 10 2 9 3 8 11 7 4 12 5 6 1 2 3 4 5 6 7 8 9 10 11 12 モーターリード(青) モーターリード(赤) モーターリード(橙) モーターリード(緑) モーターリード(黒) CWLS出力 CCWLS出力 オープン 電源入力(+) ORG出力 電源入力(−) F.G. 青 赤 橙 緑 黒 MOTOR センサ基板 CWLS ORG1 レギュレータ基板 Vin Vout CCWLS GND タイミングチャート メカリミット 原点端面 反端面 メカリミット メカストッパ ウォーム ギヤ CCWリミット CCWリミット 未検出(入光状態) CWリミット 検出(遮光状態) 反端面 原点センサ 未検出(入光状態) 検出(遮光状態) CWリミット 未検出(入光状態) 検出(遮光状態) 原点端面(ストローク中心) □ 40 □ 50 CWリミット 単位[deg.] □ 60 □ 70 □ 80 □ 100 □ 120 その他 ストローク中心 CW方向 CCWリミット CCW方向 座標基準 CWリミット 原点端面 ストローク中心 反端面 CCWリミット KGW04040 原点復帰 8.5 0 2.5 8.5 KGW04060 原点復帰 6.5 0 2.1 6.5 ※原点復帰はDS102/DS112を用いて原点復帰タイプ4を行った場合 ※座標は設計上の値です。実際には±0.5deg.程度の寸法誤差が生じることがあります。 注意:タイミングチャート図はセンサのタイミングを示すもので、出力信号論理を示すものではありません。 出力信号論理に関しましては、電気仕様―センサ―出力論理に記載されている出力トランジスタのON/OFF表示を参照下さい。 なお、出力信号に関する論理(H/L)に関しましては、 お客様側でご用意される制御回路により異なりますのでご注意下さい。 駿河精機OST事業部カスタマーサービス 原点復帰方法 当社の自動ステージは、型式によってセンサの有無や結線方法が異なります。そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 自 動 ゴ ニ オ 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 ■KGW04/KAW04 推奨原点復帰方法 原点復帰シーケンス 1-6007∼ タイプ 3:CCW方向に検出を行い、 ORG信号のCCW側エッジの検出工程を行います。 タイプ 4:CW方向に検出を行い、 ORG信号のCW側エッジの検出工程を行います。 タイプ 9:タイプ3実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ10:タイプ4実行後、TIMING信号のCW側エッジの検出工程を行います。 X 適応ドライバ・ドライバパック ■ドライバ XY 1-6013∼ AC100V系入力 DC24V系入力 Z 型式 CRD5107P(¥23,000) SD5107P2-A3(¥12,800) 型式 RKD507-A(¥39,800) 分割数 1∼1/250(16段階) Full/Half 分割数 1∼1/250(16段階) ■ドライバパック 1-6011 ※薄型タイプDP112シリーズの接続は専用ケーブルとなります。 入力電源 DC24V XYZ ドライバタイプ 筐体タイプ Full/Half 1∼1/250(16段階) 標準 DP102 (¥48,000) DP102MS (¥78,000) 薄型 DP112 (¥50,000) DP112MS (¥80,000) ■接続例 DC24V 2軸 D214-1-□E D214-1-□R(ロボットケーブル) 【DP112の場合は専用ケーブル】 回転 16ピンシリーズ ステージ 制御機器 12ピンシリーズ D214-2-□E ステージ D214-2-□R(ロボットケーブル) 【DP112の場合は専用ケーブル】 DP102/112 ボール ねじ 適応ステッピングモータコントローラ ■ ゴニオ ユニット 電源 制御I/O 制御I/O PLC位置決めユニット、 モーションコントロール ボード etc. 水平面Z コントローラ 1-6003 入力電源 ドライバタイプ 汎用入出力ポート AC100-240V DC24V Full/Half 1∼1/250(16段階) なし DS102NR (¥130,000) DS102MS (¥155,000) あり DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) なし DS112NR (¥125,000) DS112MS (¥150,000) あり DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) ■接続例 ウォーム ギヤ パーソナル コンピュータ DS102/112 制御ソフトウェア 2-6006 DSCONTROL-WIN (注1) LINK (注1)USBハブを使用する事で、PC1台で最大4リンク ネットワーク (24軸) まで制御可能です。 I/O I/O DS102/112 制御I/O 汎用I/O DS100-USB-1.8 外部制御 機器 D214-2-□E D214-2-□R(ロボットケーブル) 12ピンシリーズ ステージ □ 40 □ 50 ケーブル 1-6015∼ 2軸 D100-R9-2 ケーブル1-6019 RS232C USB USB RS232C PLC (シーケンサ) □ 60 □ 70 □ 80 □ 100 □ 120 ハンディターミナル 1-6005 リンク機能により、最大3台のコントローラと連結(最大6軸制御) して使用することが可能です。 DT100 (ハンディターミナル) その他 自動ステージ ゴニオステージ:KG05/KA05シリーズ 勝手違い 移動ガイドにクロスローラ、機構にウォームギヤを採用した高精度ゴニオステージです。 自 動 ゴ ニ オ 回転中心振れ精度は、0.01mm以内と高性能です。 ■付属品:ケーブル2m(型式:D214-2-2E) 1-6015∼ ■2軸の組合せ構成について 回転中心の異なる1軸ステージの組合せです。スペック表で隣に表記されているステージと組合せ回転中心を同一に構成してあります。 ■1軸 ■2軸 ■KG05-Wシリーズ ■KA05-Wシリーズ ケーブル付属 付属 X 標準ケーブル(2m) (型式:D214-2-2E) 本体価格に含まれております。 XY Z ケーブル 1-6015∼ 水平面Z KG05-W050A 型 式 XYZ ユニット 電気仕様 オプションコード K G 0 5 - W 0 5 0 A□ - □ ゴニオ 回転 KA05-W068A 軸 G A 1軸 2軸 回転中心高さ(W.D) 050 50mm 068 68mm 086 86mm ※2軸(KA)は選択不可 制御機器 センサカバー位置仕様 コード 無記号 R 仕様 L位置 勝手違い 1-3013 付属ケーブル仕様 標準価格との差額 1軸分 2軸分 コード 仕 様 無記号 2m − − 1 + ¥0 片端バラ 2m + ¥0 2 + ¥2,000 4m + ¥4,000 3 + ¥2,000 片端バラ 4m + ¥4,000 コネクタのみ(ケーブルなし) 4 − ¥3,000 − ¥6,000 なし 5 − ¥5,000 − ¥10,000 ロボットケーブル2m 6 + ¥3,000 + ¥6,000 ロボットケーブル4m 7 + ¥8,000 + ¥16,000 ロボットケーブル片端バラ4m 8 + ¥8,000 + ¥16,000 ロボットケーブル片端バラ2m 9 + ¥3,000 + ¥6,000 ※片端バラは反ステージ側です。 ※1 オプション仕様を選択された場合の価格は標準価格に差額 を加算して下さい。追加価格は軸数必要です。 選択例 ご希望の仕様 価 格 3 軸数 2軸 ¥308,000 + 回転中心 センサカバー 高さ (W.D) 位置 86mm + 勝手違い ― +¥0 付属ケーブル + ケーブルなし −¥10,000 △ ボール ねじ KA05-W068AR-5 ¥298,000 日目 発送 数量 1∼3 ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 S P E C 1軸 2軸 軸数 型式 KG05-W068A KG05-W086A KA05-W050A KA05-W068A KG05-W050A (勝手違い) KG05-W068AR KG05-W086AR KA05-W050AR KA05-W068AR KG05-W050AR 移動量 上軸/下軸 ±8° ±6° ±10° /±8° ±8° /±6° ±10° ステージ面サイ ズ 50×50mm メ ウォームギヤ(1/231) ウォームギヤ(1/300) 上側 カ 仕 移動機構(減速比) 下側 ウォームギヤ(1/231) ウォームギヤ(1/300) ウォームギヤ(1/375) ウォームギヤ(1/300) ウォームギヤ(1/375) 様 ガイド クロスローラガイド ステージ材質 アルミ−白アルマイト処理、真鍮−ニッケルクロームメッキ 自重 0.75kg 1.5kg 寸 ステージ高さ 18±0.2mm 36±0.4mm 法 50±0.2mm 68±0.2mm 86±0.2mm 50±0.4mm 68±0.4mm 公 回転中心高さ 差 回転中心振れ精度 0.01mm以内 ― Full時 上側 0.00156° 0.0012° 分解能/パルス 0.00156° 0.0012° 0.00096° 0.0012° 0.00096° Full時 下側 6° /sec[5kHz] 上側 7.8° /sec[5kHz] 精 MAXスピード 7.8° /sec[5kHz] 6° /sec[5kHz] 4.8° /sec[5kHz] 下側 6° /sec[5kHz] 4.8° /sec[5kHz] 度 仕 繰返位置決め精度 ±0.005° 以内 様 耐荷重 2.3kgf【22.5N】 3kgf【29.4N】 モーメント剛性 ピッチ0.42/ヨー0.16/ロール0.23[″ /N・cm] ピッチ0.65/ヨー0.32/ロール0.65[″ /N・cm] ロストモーション 0.01° 以内 有 セ リミットセンサ 有 ン 原点センサ サ 近接原点センサ 有 価格 ¥154,000 ¥308,000 駿河精機OST事業部カスタマーサービス CAD DATA 外形寸法図〔1軸〕 ■KG05-Wシリーズ 156 9.5 96.5 84 自 動 ゴ ニ オ φ20 50 14 40 30 φ13 □40 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) φ4(H7)深4 3 裏ヨリφ4(H7)深2 50 40 30 ツマミ 8-M3深4 回転中心 回転中心 KG05-W050A 86 19 38 X 12 7 19 38 18 目盛1゚バーニア0.1゚ 18 目盛1゚バーニア0.1゚ 7.8 11.3 12 7 19 38 18 50 目盛1゚バーニア0.1゚ 68 回転中心 KG05-W068A KG05-W086A XY Z 水平面Z ■KG05-WRシリーズ 156 50 40 30 9.5 φ4(H7)深4 裏ヨリφ4(H7)深2 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) ゴニオ 回転 φ13 ツマミ XYZ 3 □40 30 40 50 φ20 14 96.5 84 8-M3深4 回転中心 ユニット 回転中心 86 7 38 19 18 12 12 7 38 19 制御機器 18 目盛1゚バーニア0.1゚ 50 目盛1゚バーニア0.1゚ KG05-W050AR KG05-W068AR KG05-W086AR ボール ねじ 外形寸法図〔2軸〕 ■KA05-WRシリーズ ■KA05-Wシリーズ 156 96.5 84 156 96.5 84 50 40 30 φ13 9.5 φ4(H7)深4 裏ヨリφ4(H7)深2 14 φ13 8-M3深4 84 96.5 8-M3深4 ウォーム ギヤ 160.5 φ13 ツマミ ツマミ 160.5 96.5 84 30 40 50 φ20 50 14 40 30 φ13 φ4(H7)深4 裏ヨリφ4(H7)深2 50 40 30 φ20 9.5 φ20 φ20 回転中心 回転中心 KA05-W050A KA05-W068A □40 KA05-W050AR 68 18 25.8 36 8.8 50 3 7 38 19 12 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) 3 7.8 38 19 18 25 36 8 8.8 4-3.5キリ、 φ6ザグリ (M3用ボルト穴) 11.3 □40 回転中心 19 38 7.8 3 11.3 25 18 19 38 36 25.8 18 7 3 12 36 8 50 68 □ 40 回転中心 □ 50 □ 60 □ 70 □ 80 KA05-W068AR □ 100 □ 120 その他 自動ステージ 電気仕様・オプション KG05/KA05 電気仕様 型式 勝手違い 自 動 ゴ ニ オ モータ (※1) コネクタ KG05-W050A KG05-W068A KG05-W086A KG05-W050AR KG05-W068AR KG05-W086AR 5相ステッピングモータ 0.75A/相 (オリエンタルモーター㈱) C9582-9015-1(□38mm)駿河精機管理型式 0.36° HR10A-10J-12P(73) (ヒロセ電機㈱) HR10A-10P-12S(73) (ヒロセ電機㈱) 有 有 有 フォトマイクロセンサ:EE-SX4134(オムロン㈱) :リミット、原点センサ(ORG1) フォトマイクロセンサ:PM-L24(サンクス㈱) :スリット原点センサ(ORG2) DC5∼24V ±10% 100mA以下 EE-SX4134:NPNオープンコレクタ出力 DC5V∼24V 8mA以下 残留電圧0.4V以下 (負荷電流8mA時) PM-L24:NPNオープンコレクタ出力 DC30V以下 50mA以下 残留電圧0.4V以下 (負荷電流16mA時) 残留電圧0.7V以下 (負荷電流50mA時) EE-SX4134:検出(遮光)時 出力トランジスタOFF(非導通) PM-L24:検出(入光)時 出力トランジスタON(導通) タイプ 型式 ステップ角 型式 受側適合コネクタ リミットセンサ 原点センサ (ORG1) スリット原点センサ(ORG2) 型式 X センサ 電源電圧 消費電流 XY 制御出力 Z 出力論理 水平面Z XYZ ※1 モータ単体性能の詳細 1-6021 ピン配列 結線図 ゴニオ 1 10 2 9 3 8 回転 ユニット 1 2 3 4 5 6 7 8 9 10 11 12 制御機器 11 7 4 12 5 6 モータリード モータリード モータリード モータリード モータリード CWLS出力 CCWLS出力 ORG2出力 電源入力(+) ORG1出力 電源入力(−) F.G □50ゴニオセンサ論理 青 赤 橙 緑 黒 Type CWLS ORG1 CCWLS ORG2 NC NC NO NC A EE-SX4134 EE-SX4134 EE-SX4134 PM-L24 MOTOR レギュレータ 基板 CWLS/ CCWLS/ ORG1 (センサ基板) ※上段:センサ論理 下段:使用センサ 注意:□50ゴニオステージのセンサ論理は上記のみとな ります ORG2 ※破線部は標準ケーブルを使用した場合、機能しません。 ボール ねじ 内蔵センサに関して ■KGシリーズは下図のように センサを内蔵しています。 ■このステージに標準で付属するケーブル(D214-2-2E)を用いて、 当社のコントローラに接続した場合の結線図は以下のようになります。 コントローラ リミットセンサ(CCWLS) 標準ケーブル KG自動ステージ 原点センサ(ORG1) リミットセンサ (CWLS) スリット原点センサ (ORG2) ウォーム ギヤ □ 40 □ 50 コントローラ側端子機能 A C モータ E G J CWLS入力 L CCWLS入力 M NORG入力 N ORG入力 O センサ電源(DC5V(+)) P センサ電源(DC5V(−)) R 電磁ブレーキ電源(DC24V(+)) S 電磁ブレーキ電源(DC24V(−)) T U F.G A C E G J L M N O P R S T U 1 2 3 4 5 6 7 8 9 10 11 12 ステージ側端子機能 1 2 3 モータ 4 5 6 CWLS出力 7 CCWLS出力 8 ORG2出力 9 電源入力(+) 10 ORG1出力 11 電源入力(−) 12 F.G □ 60 □ 70 □ 80 自動ステージ側のCWLS(6番ピン)とCCWLS(7番ピン)は、通常どおりコントローラのCWLS(L番ピン)とCCWLS(M番ピン)につながり ますが、自動ステージ側のORG2出力(8番ピン)はDC5V(−)に接続され、ORG1出力(10番ピン)はORGと接続してしまいます。つまりこ の結線ではORG2のセンサは機能せず、 ORG1のセンサのみが原点信号としてコントローラに識別されます。結果として、 3個のセンサ(CWLS、 CCWLS、ORG) しか持たない自動ステージと同じ機能となり、原点復帰方法もスリット原点センサを用いない方法で行う必要があります。 □ 100 □ 120 その他 ●スリット原点センサ(ORG2)対応ケーブルをご用意いたしました! ※詳細は 1-6015∼をご覧ください。 当シリーズは内部に4個のセンサを標準装備しております。スリット原点センサ(ORG2)を使い、4センサでご使用になる場合は、 『4センサ対 応ケーブル』が必要となります。また、推奨原点復帰方法もタイプが異なりますので、 ご注意ください。 ご注文の型式は「ケーブルコード:5(ケーブルなし)」を選び、4センサ対応ケーブル( 1-6015∼)をご指定ください。 駿河精機OST事業部カスタマーサービス タイミングチャート S S…原点のスリット (検出)間隔 未検出(遮光状態) スリット原点(ORG2) 検出(入光状態) 未検出(遮光状態) スリット原点(ORG2) 検出(入光状態) メカストッパ メカストッパ 未検出(入光状態) 検出(遮光状態) 原点センサ(ORG1)未検出(入光状態) 検出(遮光状態) 未検出(入光状態) C Wリミット 検出(遮光状態) 未検出(入光状態) CCWリミット 検出(遮光状態) 未検出(入光状態) 原点センサ(ORG1) 検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) C CWリミット (反モータ側)CW スリット原点センサ(ORG2) 反端面 自 動 ゴ ニ オ スリット遮光板 原点端面 CWリミット CCWリミット 原点センサ(ORG1) CCW(モータ側) メカ CW 原点 リミット リミット 端面 反 CCW メカ 端面 リミット リミット X 単位[deg] CW方向 原点スリット(検出)間隔S CWリミット 座標基準 10.3 KG05-W050A 1.6 原点復帰 8.3 KG05-W068A 1.2 原点復帰 6.3 KG05-W086A 1.0 原点復帰 ※原点復帰はDS102/112シリーズコントローラを用いて原点復帰タイプ4を行った場合 ※座標は設計上の値です。実際には±0.5[deg]程度の寸法誤差が生じることがあります。 原点 0 0 0 反端面 1.9 1.5 1.2 CCW方向 CCWリミット 10.3 8.3 6.3 XY Z 水平面Z XYZ ゴニオ 原点復帰方法 当社の自動ステージは、型式によってセンサの有無や結線方法が異なります。そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 回転 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 ユニット ■KG05/KA05 推奨原点復帰方法 原点復帰シーケンス 1-6007∼ 制御機器 タイプ 3:CCW方向に検出を行い、 ORG信号のCCW側エッジの検出工程を行います。 タイプ 4:CW方向に検出を行い、 ORG信号のCW側エッジの検出工程を行います。 タイプ 9:タイプ3実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ10:タイプ4実行後、TIMING信号のCW側エッジの検出工程を行います。 ●スリット原点センサ(ORG2)対応ケーブルをご用意いたしました! ※この場合、原点復帰方法は以下からお選びください。 はじめにNORG信号のCW側エッジの検出工程を行い、次にORG信号のCCW側エッジの検出工程を行います。 タイプ1 CCW方向に検出を行い、 はじめにNORG信号のCCW側エッジの検出工程を行い、次にORG信号のCW側エッジの検出工程を行います。 タイプ2 CW方向に検出を行い、 タイプ7 タイプ1実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ8 タイプ2実行後、TIMING信号のCW側エッジの検出工程を行います。 ボール ねじ 適応ドライバ・ドライバパック ■ドライバ 1-6013∼ AC100V系入力 DC24V系入力 型式 CRD5107P(¥23,000) SD5107P2-A3(¥12,800) 型式 RKD507-A(¥39,800) 分割数 1∼1/250(16段階) Full/Half 分割数 1∼1/250(16段階) ■ドライバパック 入力電源 1-6011 筐体タイプ DC24V ウォーム ギヤ ※薄型タイプDP112シリーズの接続は専用ケーブルとなります。 ドライバタイプ Full/Half 1∼1/250(16段階) 標準 DP102 (¥48,000) DP102MS (¥78,000) 薄型 DP112 (¥50,000) DP112MS (¥80,000) DP102/112 □ 40 □ 50 適応ステッピングモータコントローラ ■ □ 60 コントローラ 1-6003 入力電源 AC100-240V DC24V □ 70 汎用入出力ポート ドライバタイプ Full/Half 1∼1/250(16段階) なし DS102NR (¥130,000) DS102MS (¥155,000) あり DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) なし DS112NR (¥125,000) DS112MS (¥150,000) あり DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) □ 80 □ 100 □ 120 その他 DS102/112 自動ステージ ゴニオステージ:KGW06シリーズ(1軸) 勝手違い 移動ガイドにクロスローラ、機構にウォームギヤを採用した高精度ゴニオステージです。 ■1軸 自 動 ゴ ニ オ ■KGW06シリーズ 規 格 変 更 センサ DC5V∼24V対応 1-3019 ケーブル別売 別売 X ケーブルは付属しません。 ケーブルオプションより お選びください。 XY KGW06050 Z 水平面Z 型 式 ケーブル 1-6015∼ オプションコード 電気仕様 K G W 0 6 0 5 0 -□ □ XYZ ゴニオ センサカバー位置仕様 回転 コード L R ユニット ステージ面サイズ 06 □60mm 制御機器 仕 様 L位置 勝手違い 回転中心高さ(W.D) 050 50mm 075 75mm 100 100mm 125 125mm 1-3019 ケーブルオプション 標準価格との差額 1軸分 コード 仕 様 + ¥5,000 A 2m + ¥5,000 B 片端バラ 2m + ¥6,000 C 4m + ¥6,000 D 片端バラ 4m + ¥1,800 E コネクタのみ(ケーブルなし) + ¥8,000 F ロボットケーブル2m + ¥8,000 G ロボットケーブル片端バラ2m ロボットケーブル4m + ¥11,000 H ロボットケーブル片端バラ4m + ¥11,000 J 無記号 なし + ¥0 ※片端バラは反ステージ側です。 ※オプション仕様を選択された場合の価格は標準価格 に差額を加算して下さい。 選択例 ご希望の仕様 価 格 3 軸数 1軸 ¥153,000 + 回転中心 センサカバー 高さ (W.D) 位置 50mm + 勝手違い ― +¥0 付属ケーブル + ロボットケーブル4m +¥11,000 △ ボール ねじ KGW06050-RH ¥164,000 日目 発送 数量 1∼3 ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 S P E C 軸数 型式 (勝手違い) 移動量 メ ステージ面サイズ カ 移動機構(減速比) 仕 ガイド 様 ステージ材質 自重 寸 ステージ高さ 法 公 回転中心高さ 差 回転中心振れ精度 分解能/パルス 精 MAXスピード 度 繰返位置決め精度 仕 耐荷重 様 モーメント剛性 ロストモーション セ リミットセンサ ン 原点センサ サ 近接原点センサ 価格 1軸 KGW06050-L KGW06050-R ±10° ウォームギヤ(1/160) 50±0.2mm 0.0045° (Full) 22.5° /sec[5kHz] KGW06075-L KGW06075-R ±8° KGW06100-L KGW06100-R ±6° 60×60mm ウォームギヤ(1/225) ウォームギヤ(1/292) クロスローラガイド アルミ−黒アルマイト処理 0.5kg 25±0.2mm 75±0.2mm 100±0.2mm 0.01mm以内 0.0032° (Full) 0.0025° (Full) 16° /sec[5kHz] 12.5° /sec[5kHz] ±0.003° 以内 5kgf【49N】 ピッチ0.30/ヨー0.10/ロール0.11[″ /N・cm] 0.01° 以内 有 有 − ¥153,000 KGW06125-L KGW06125-R ±5° ウォームギヤ(1/360) 125±0.2mm 0.0020° (Full) 10° /sec[5kHz] 駿河精機OST事業部カスタマーサービス CAD DATA 外形寸法図〔1軸〕 ■KGW06-Lシリーズ 136.5 11.5 60 50 32 5 自 動 ゴ ニ オ 50 32 φ15 60 50 φ12 13 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 65 59 ツマミ φ4(H7)深5 裏ヨリφ4(H7)深3 4-M4深5 4-M3深5 回転中心 X 回転中心 3.5 4 50 Z 14 25 10.5 目盛1° バーニア0.1° 28 14 25 10 目盛1° バーニア0.1° 28 50 75 XY 水平面Z 50 KGW06050-L KGW06075-L XYZ 回転中心 回転中心 ゴニオ 100 125 回転 28 14 25 9.8 制御機器 50 4.2 50 3.6 ユニット 目盛0.5°バーニア0.05° 28 14 25 10.4 目盛0.5゜バーニア0.05゜ KGW06100-L KGW06125-L ■KGW06-Rシリーズ(勝手違い) 136.5 60 50 32 ボール ねじ 11.5 5 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 50 32 50 60 φ15 φ12 13 65 59 ツマミ φ4(H7)深5 裏ヨリφ4(H7)深3 4-M4深5 4-M3深5 回転中心 ウォーム ギヤ 50 75 回転中心 25 KGW06075-R 回転中心 回転中心 3.5 50 KGW06050-R 10.5 28 14 25 目盛1° バーニア0.1° 4 50 10 14 28 目盛1° バーニア0.1° □ 40 □ 50 □ 60 100 125 □ 70 目盛0.5゜バーニア0.05゜ □ 100 KGW06100-R 9.8 KGW06125-R 25 28 14 50 4.2 10.4 3.6 28 14 25 目盛0.5°バーニア0.05° 50 □ 80 □ 120 その他 自動ステージ ゴニオステージ:KAW06シリーズ(2軸) 勝手違い 移動ガイドにクロスローラ、機構にウォームギヤを採用した高精度ゴニオステージです。 ■2軸の組合せ構成について 自 動 ゴ ニ オ 回転中心の異なる1軸ステージの組合せです。スペック表で隣に表記されているステージと組合せ回転中心を同一に構成してあります。 ■2軸 規 格 変 更 ■KAW06シリーズ センサ DC5V∼24V対応 1-3019 ケーブル別売 X 別売 XY ケーブルは付属しません。 ケーブルオプションより お選びください。 Z KAW06075 ケーブル 1-6015∼ 水平面Z 型 式 XYZ オプションコード 電気仕様 K AW 0 6 0 5 0 -□ □ ゴニオ 回転 センサカバー位置仕様 コード L R ユニット 制御機器 ステージ面サイズ 06 □60mm 仕 様 L位置 勝手違い 回転中心高さ(W.D) 050 50mm 075 75mm 100 100mm 1-3019 ケーブルオプション 標準価格との差額 2軸分 コード 仕 様 + ¥10,000 A 2m + ¥10,000 B 片端バラ 2m + ¥12,000 C 4m + ¥12,000 D 片端バラ 4m + ¥3,600 E コネクタのみ(ケーブルなし) + ¥16,000 F ロボットケーブル2m + ¥16,000 G ロボットケーブル片端バラ2m ロボットケーブル4m + ¥22,000 H ロボットケーブル片端バラ4m + ¥22,000 J 無記号 なし + ¥0 ※片端バラは反ステージ側です。 ※オプション仕様を選択された場合の価格は標準価格 に差額を加算して下さい。 選択例 ご希望の仕様 価 格 3 軸数 2軸 ¥306,000 + 回転中心 センサカバー 高さ (W.D) 位置 100mm + 通常 ― +¥0 付属ケーブル + 片端バラ2m +¥10,000 △ ボール ねじ KAW06100 ¥316,000 日目 発送 数量 1∼3 ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 S P E C 軸数 型式 (勝手違い) 移動量 上軸/下軸 ステージ面サイズ メ 上側 カ 移動機構(減速比) 下側 仕 様 ガイド ステージ材質 自重 寸 ステージ高さ 法 公 回転中心高さ 差 回転中心振れ精度 Full時 上側 分解能/パルス Full時 下側 上側 精 MAXスピード 下側 度 仕 繰返位置決め精度 様 耐荷重 モーメント剛性 ロストモーション セ リミットセンサ ン 原点センサ サ 近接原点センサ 価格 2軸 KAW06050-L KAW06050-R ±10° /±8° ウォームギヤ(1/160) ウォームギヤ(1/225) 50±0.4mm 0.0045° 0.0032° 22.5° /sec[5kHz] 16° /sec[5kHz] KAW06075-L KAW06075-R ±8° /±6° 60×60mm ウォームギヤ(1/225) ウォームギヤ(1/292) クロスローラガイド アルミ−黒アルマイト処理 1.0kg 50±0.4mm 75±0.4mm ― 0.0032° 0.0025° 16° /sec[5kHz] 12.5° /sec[5kHz] ±0.005° 以内 4.5kgf【44.1N】 ピッチ0.41/ヨー0.2/ロール0.41[″ /N・cm] 0.01° 以内 有 有 − ¥306,000 KAW06100-L KAW06100-R ±6° /±5° ウォームギヤ(1/292) ウォームギヤ(1/360) 100±0.4mm 0.0025° 0.0020° 12.5° /sec[5kHz] 10° /sec[5kHz] 駿河精機OST事業部カスタマーサービス CAD DATA 外形寸法図〔2軸〕 ■KAW06-Lシリーズ 自 動 ゴ ニ オ 136.5 11.5 60 50 32 50 回転中心 3.5 14 28 65 59 4-M3深5 5 138 ツマミ 4-M4深5 50 35 25 10.5 φ12 60 50 32 φ15 13 φ4(H7)深5 裏ヨリφ4(H7)深3 65 59 □50 4-4.5キリφ8ザグリ (M4用ボルト穴) X KAW06050-L XY Z 水平面Z 回転中心 回転中心 75 100 XYZ 4-4.5キリφ8ザグリ (M4用ボルト穴) 14 28 50 35.4 25 9.8 回転 5 □50 4.2 14 28 5 3.6 50 35.5 25 10.4 ゴニオ KAW06075-L □50 4-4.5キリφ8ザグリ (M4用ボルト穴) KAW06100-L ユニット 制御機器 ■KAW06-Rシリーズ(勝手違い) ボール ねじ 136.5 11.5 φ4(H7)深5 裏ヨリφ4(H7)深3 □50 4-4.5キリφ8ザグリ (M4用ボルト穴) 3.5 59 4-M3深5 5 10.5 4-M4深5 28 14 ツマミ 25 50 φ15 32 50 60 φ12 13 回転中心 50 60 50 32 65 59 ウォーム ギヤ KAW06050-R 回転中心 □ 40 100 75 回転中心 □ 50 □ 60 KAW06075-R 25 35.4 50 28 14 □ 80 □ 100 □50 KAW06100-R 4.2 4-4.5キリφ8ザグリ (M4用ボルト穴) 5 9.8 □50 3.6 4-4.5キリφ8ザグリ (M4用ボルト穴) 5 10.4 28 14 25 35.5 50 □ 70 □ 120 その他 自動ステージ 電気仕様:KGW06/KAW06 電気仕様 自 動 ゴ ニ オ 型式 勝手違い モータ (※1) コネクタ センサ X 制御出力 出力論理 ゴニオ KGW06125-L KGW06125-R ※1 モータ単体性能の詳細 1-6021 センサDC5V∼24V対応になりました 水平面Z XYZ KGW06075-L KGW06100-L KGW06075-R KGW06100-R 5相ステッピングモータ 0.75A/相(オリエンタルモーター㈱) C005C-90215P(□28mm)駿河精機管理型式 0.72° HR10A-10J-12P(73) (ヒロセ電機㈱) HR10A-10P-12S(73) (ヒロセ電機㈱) 有 有 − フォトマイクロセンサ EE-SX4134(オムロン㈱) DC5∼24V ±10% 合計60mA以下 NPNオープンコレクタ出力 DC5∼24V 8mA以下 残留電圧0.3V以下(負荷電流2mA時) 検出(遮光)時:出力トランジスタOFF(非導通) タイプ 型式 ステップ角 型式 受側適合コネクタ リミットセンサ 原点センサ 近接原点センサ 型式 電源電圧 消費電流 XY Z KGW06050-L KGW06050-R このステージはDC5V∼24V対応センサを搭載しています 24V対応センサアンプ基板K-PCBA24は不要です 当社のコントローラを使わずに、 モーションコントロールボードやプログラマブルロジックコントローラ(PLC) を用いて従来製品を動作させようとした場合、直接制御 機器に接続できず、K-PCBA24が必要でした。 ご注意ください 回転 従来のKS501-40,-60とセンサアンプ基板(K-PCBA24) をご使用頂いているお客様で、 ステージをKGW04,06に置き換える場合は、 センサアンプ基板を 使用しないで配線して頂く必要があります。 センサアンプ基板を使用した既存のケーブルを活かすために、 センサアンプ基板の入出力コネクタ間をジャンパするハーネスもご用意しております。詳細は お問合せ下さい。 ユニット 制御機器 ピン配列 ボール ねじ 結線図 1 10 2 9 3 8 11 7 4 12 5 1 2 3 4 5 6 7 8 9 10 11 12 6 モーターリード(青) モーターリード(赤) モーターリード(橙) モーターリード(緑) モーターリード(黒) CWLS出力 CCWLS出力 オープン 電源入力(+) ORG出力 電源入力(−) F.G. 青 赤 橙 緑 黒 MOTOR センサ基板 CWLS ORG1 レギュレータ基板 Vin Vout CCWLS GND タイミングチャート メカリミット 原点端面 反端面 メカリミット メカストッパ CCWリミット CCWリミット 未検出(入光状態) CWリミット 検出(遮光状態) ウォーム ギヤ 反端面 原点センサ 未検出(入光状態) 検出(遮光状態) CWリミット 未検出(入光状態) 検出(遮光状態) 原点端面(ストローク中心) CWリミット □ 40 単位[deg.] □ 70 □ 80 □ 100 □ 120 その他 CCWリミット CCW方向 座標基準 CWリミット 原点端面 ストローク中心 KGW06050 原点復帰 10.5 0 2.5 10.5 KGW06075 原点復帰 8.3 0 1.8 8.3 KGW06100 原点復帰 6.3 0 1.4 6.3 KGW06125 原点復帰 5.2 0 1.1 5.2 □ 50 □ 60 ストローク中心 CW方向 反端面 CCWリミット ※原点復帰はDS102/DS112を用いて原点復帰タイプ4を行った場合 ※座標は設計上の値です。実際には±0.5deg.程度の寸法誤差が生じることがあります。 注意:タイミングチャート図はセンサのタイミングを示すもので、出力信号論理を示すものではありません。 出力信号論理に関しましては、電気仕様―センサ―出力論理に記載されている出力トランジスタのON/OFF表示を参照下さい。 なお、出力信号に関する論理(H/L)に関しましては、 お客様側でご用意される制御回路により異なりますのでご注意下さい。 駿河精機OST事業部カスタマーサービス 原点復帰方法 当社の自動ステージは、型式によってセンサの有無や結線方法が異なります。そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 自 動 ゴ ニ オ 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 ■KGW06/KAW06 推奨原点復帰方法 原点復帰シーケンス 1-6007∼ タイプ 3:CCW方向に検出を行い、 ORG信号のCCW側エッジの検出工程を行います。 タイプ 4:CW方向に検出を行い、 ORG信号のCW側エッジの検出工程を行います。 タイプ 9:タイプ3実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ10:タイプ4実行後、TIMING信号のCW側エッジの検出工程を行います。 X 適応ドライバ・ドライバパック ■ドライバ XY 1-6013∼ AC100V系入力 DC24V系入力 Z 型式 CRD5107P(¥23,000) SD5107P2-A3(¥12,800) 型式 RKD507-A(¥39,800) 分割数 1∼1/250(16段階) Full/Half 分割数 1∼1/250(16段階) ■ドライバパック 1-6011 ※薄型タイプDP112シリーズの接続は専用ケーブルとなります。 入力電源 DC24V XYZ ドライバタイプ 筐体タイプ Full/Half 1∼1/250(16段階) 標準 DP102 (¥48,000) DP102MS (¥78,000) 薄型 DP112 (¥50,000) DP112MS (¥80,000) ■接続例 DC24V 2軸 D214-1-□E D214-1-□R(ロボットケーブル) 【DP112の場合は専用ケーブル】 回転 16ピンシリーズ ステージ 制御機器 12ピンシリーズ D214-2-□E ステージ D214-2-□R(ロボットケーブル) 【DP112の場合は専用ケーブル】 DP102/112 ボール ねじ 適応ステッピングモータコントローラ ■ ゴニオ ユニット 電源 制御I/O 制御I/O PLC位置決めユニット、 モーションコントロール ボード etc. 水平面Z コントローラ 1-6003 入力電源 ドライバタイプ 汎用入出力ポート AC100-240V DC24V Full/Half 1∼1/250(16段階) なし DS102NR (¥130,000) DS102MS (¥155,000) あり DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) なし DS112NR (¥125,000) DS112MS (¥150,000) あり DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) ■接続例 ウォーム ギヤ パーソナル コンピュータ DS102/112 制御ソフトウェア 2-6006 DSCONTROL-WIN (注1) LINK (注1)USBハブを使用する事で、PC1台で最大4リンク ネットワーク (24軸) まで制御可能です。 I/O I/O DS102/112 制御I/O 汎用I/O DS100-USB-1.8 外部制御 機器 D214-2-□E D214-2-□R(ロボットケーブル) 12ピンシリーズ ステージ □ 40 □ 50 ケーブル 1-6015∼ 2軸 D100-R9-2 ケーブル1-6019 RS232C USB USB RS232C PLC (シーケンサ) □ 60 □ 70 □ 80 □ 100 □ 120 ハンディターミナル 1-6005 リンク機能により、最大3台のコントローラと連結(最大6軸制御) して使用することが可能です。 DT100 (ハンディターミナル) その他 自動ステージ ゴニオステージ:KG07/KA07シリーズ 勝手違い 移動ガイドにクロスローラ、機構にウォームギヤを採用した高精度ゴニオステージです。 自 動 ゴ ニ オ センサ論理オプション 70×70mmシリーズは、 センサ論理選定のオプションがついており、選択の幅を広げます。 ■付属品:ケーブル2m(型式:D214-2-2E) 1-6015 ■2軸の組合せ構成について 回転中心の異なる1軸ステージの組合せです。スペック表で隣に表記されているステージと組合せ回転中心を同一に構成してあります。 ■1軸 ■2軸 ■KG07-Wシリーズ ■KA07-Wシリーズ ケーブル付属 付属 X XY 標準ケーブル(2m) (型式:D214-2-2E) 本体価格に含まれております。 Z ケーブル 1-6015∼ 水平面Z KG07-W070A 型 式 XYZ KA07-W070A K G 0 7 - W 0 7 0□ □- □ ゴニオ 回転 センサカバー位置仕様 コード 無記号 R ユニット 制御機器 軸 G A 1軸 2軸 回転中心高さ(W.D) 070 70mm 096 96mm 122 122mm ※KA07はW.D70、96mmのみ 電気仕様 2-3023 オプションコード 仕様 通常 勝手違い センサー論理 Type CWLS ORG1 CCWLS ORG2 A NC NC NC B NO NO NO NO C NC NO NC 付属ケーブル仕様 標準価格との差額 1軸分 2軸分 コード 仕 様 無記号 2m − − 1 + ¥0 片端バラ 2m + ¥0 2 + ¥2,000 4m + ¥4,000 3 + ¥2,000 片端バラ 4m + ¥4,000 コネクタのみ(ケーブルなし) 4 − ¥3,000 − ¥6,000 なし 5 − ¥5,000 − ¥10,000 ロボットケーブル2m 6 + ¥3,000 + ¥6,000 ロボットケーブル4m 7 + ¥8,000 + ¥16,000 ロボットケーブル片端バラ4m 8 + ¥8,000 + ¥16,000 ロボットケーブル片端バラ2m 9 + ¥3,000 + ¥6,000 ※片端バラは反ステージ側です。 ※1 オプション仕様を選択された場合の価格は標準価格に差額 を加算して下さい。 選択例 ご希望の仕様 価 格 3 軸数 2軸 ¥296,000 + 回転中心 センサカバー センサ論理 高さ (W.D) 位置 96mm 勝手違い + + 全てNO ― +¥0 +¥0 付属ケーブル + コネクタのみ −¥6,000 △ ボール ねじ KA07-W096BR-4 ¥290,000 日目 発送 数量 1∼3 ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 S P E C 1軸 2軸 軸数 KG07-W096A KG07-W122A KA07-W070A KA07-W096A 型式 KG07-W070A (勝手違い) KG07-W096AR KG07-W122AR KA07-W070AR KA07-W096AR KG07-W070AR ±7° ±5° ±9° /±7° ±7° /±5° 移動量 上軸/下軸 ±9° ステージ面サイズ 70×70mm メ 上側 ウォームギヤ(1/235) ウォームギヤ(1/301) ウォームギヤ(1/235) ウォームギヤ(1/301) ウォームギヤ(1/375) カ 移動機構(減速比) ウォームギヤ(1/301) ウォームギヤ(1/375) 下側 仕 クロスローラガイド 様 ガイド ステージ材質 アルミ−白アルマイト処理 自重 1.0kg 2.0kg 寸 ステージ高さ 26±0.2mm 52±0.4mm 法 96±0.2mm 122±0.2mm 70±0.4mm 96±0.4mm 70±0.2mm 公 回転中心高さ 差 回転中心振れ精度 0.01mm以内 ― 0.00153° Full時 上側 0.0012° 0.00153° 0.0012° 0.00096° 分解能(パルス) 0.0012° 0.00096° Full時 下側 7.6° /sec[5kHz] 上側 6° /sec[5kHz] 精 MAXスピード 7.6° /sec[5kHz] 6° /sec[5kHz] 4.8° /sec[5kHz] 下側 6° /sec[5kHz] 4.8° /sec[5kHz] 度 仕 繰返位置決め精度 ±0.003° 以内 様 耐荷重 5kgf【49N】 4kgf【39.2N】 モーメント剛性 ピッチ0.17/ヨー0.06/ロール0.06[″ /N・cm] ピッチ0.23/ヨー0.12/ロール0.23[″ /N・cm] ロストモーション 0.006° 以内 有 セ リミットセンサ 有 ン 原点センサ サ 近接原点センサ 有 価格 ¥149,000 ¥296,000 駿河精機OST事業部カスタマーサービス CAD DATA 外形寸法図〔1軸〕 ■KG07-Wシリーズ 190 13.5 φ5(H7)深4 裏ヨリφ4(H7)深2 4 106.5 94 自 動 ゴ ニ オ φ20 70 60 40 30 φ17 □60 17 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 70 60 40 30 ツマミ 4-M4深5 8-M3深4 回転中心 回転中心 KG07-W096A 19 38 26 19 38 26 11.8 7.2 19 38 26 9 10 KG07-W070A X 目盛05゚バーニア0.05゚ 目盛1゚バーニア0.1゚ 目盛1゚バーニア0.1゚ 11.9 7.1 70 96 122 回転中心 XY KG07-W122A Z 水平面Z ■KG07-WRシリーズ 190 70 60 40 30 XYZ 13.5 φ5(H7)深4 裏ヨリφ4(H7)深2 4 ゴニオ 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 回転 □60 φ17 30 40 60 70 φ20 17 106.5 94 ツマミ ユニット 4-M4深5 8-M3深4 回転中心 制御機器 回転中心 122 96 38 19 KG07-W122AR 7.1 11.9 KG07-W096AR 7.2 11.8 KG07-W070AR 26 目盛05゚バーニア0.05゚ 26 目盛1゚バーニア0.1゚ 10 9 38 19 26 目盛1゚バーニア0.1゚ 38 19 70 回転中心 ボール ねじ 外形寸法図〔2軸〕 ■KA07-Wシリーズ ■KA07-WRシリーズ 190 13.5 190 106.5 94 106.5 94 70 60 40 30 φ17 13.5 φ5(H7)深4 裏ヨリφ5(H7)深2 8-M3深4 4-M4深5 φ17 30 40 60 70 φ20 ツマミ ツマミ φ20 ウォーム ギヤ 94 106.5 193.5 193.5 106.5 94 φ20 70 60 40 30 φ17 17 17 φ5(H7)深4 裏ヨリφ5(H7)深2 70 60 40 30 φ17 8-M3深4 4-M4深5 φ20 回転中心 □ 40 回転中心 □ 50 4.8 70 2 2 4.8 70 96 回転中心 96 回転中心 □ 60 KA07-W070A 26 37.8 52 7.1 11.9 60 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) KA07-W070AR 38 19 26 35 52 38 19 19 38 52 37.8 26 KA07-W096A 7.2 11.8 4-4.5キリ、 φ8ザグリ (M4用ボルト穴) 11.9 4 7.1 □60 38 19 11.8 4 7.2 52 35 26 □ 70 KA07-W096AR □ 80 □ 100 □ 120 その他 自動ステージ 電気仕様:KG07/KA07 電気仕様 型式 勝手違い 自 動 ゴ ニ オ X XY Z 水平面Z XYZ KG07-W070A KG07-W070AR KG07-W096A KG07-122A KG07-W096AR KG07-122AR 5相ステッピングモータ 0.75A/相 (オリエンタルモーター㈱) タイプ モータ (※1) C9582-9015-1(□38mm)駿河精機管理型式 型式 0.36° ステップ角 HR10A-10J-12P(73) (ヒロセ電機㈱) 型式 コネクタ 受側適合コネクタ HR10A-10P-12S(73) (ヒロセ電機㈱) リミットセンサ 有 原点センサ(ORG1) 有 スリット原点センサ(ORG2) 有 フォトマイクロセンサ:EE-SX398(オムロン㈱)、EE-SX498(オムロン㈱) :リミット、原点センサ(ORG1) 型式 フォトマイクロセンサ:PM-L24(サンクス㈱) :スリット原点センサ(ORG2) DC5∼24V ±10% 電源電圧 100mA以下 消費電流 センサ EE-SX398、EE-SX498:NPNオープンコレクタ出力 DC5V∼24V 16mA以下 残留電圧0.4V以下 (負荷電流16mA時) 制御出力 PM-L24:NPNオープンコレクタ出力 DC30V以下 50mA以下 残留電圧0.4V以下 (負荷電流16mA時) 残留電圧0.7V以下 (負荷電流50mA時) EE-SX398:検出(遮光) 時出力トランジスタON (導通) EE-SX498:検出(遮光) 時出力トランジスタOFF (非導通) 出力論理 PM-L24:検出(入光) 時出力トランジスタON (導通) ※1 モータ単体性能の詳細 1-6021 ゴニオ ピン配列 回転 1 10 2 9 3 8 ユニット 結線図 1 2 3 4 5 6 7 8 9 10 11 12 制御機器 11 7 4 12 5 6 モータリード モータリード モータリード モータリード モータリード CWLS出力 CCWLS出力 ORG2出力 電源入力(+) ORG1出力 電源入力(−) F.G 青 赤 橙 緑 黒 □70ゴニオセンサ論理 MOTOR レギュレータ 基板 CWLS/ CCWLS/ ORG1 (センサ基板) Type CWLS NC A EE-SX498 NO B EE-SX398 NC C EE-SX498 ORG1 NC EE-SX498 NO EE-SX398 NO EE-SX398 CCWLS ORG2 NC EE-SX498 NO NO EE-SX398 PM-L24 NC EE-SX498 ※上段:センサ論理 下段:使用センサ ORG2 ※破線部は標準ケーブルを使用した場合、機能しません。 ボール ねじ 内蔵センサに関して ■KGシリーズは下図のように センサを内蔵しています。 ■このステージに標準で付属するケーブル(D214-2-2E)を用いて、 当社のコントローラに接続した場合の結線図は以下のようになります。 コントローラ リミットセンサ(CCWLS) 標準ケーブル KG自動ステージ 原点センサ(ORG1) リミットセンサ(CWLS) ウォーム ギヤ □ 40 □ 50 □ 60 □ 70 □ 80 □ 100 □ 120 その他 スリット原点センサ (ORG2) コントローラ側端子機能 A C モータ E G J CWLS入力 L CCWLS入力 M NORG入力 N ORG入力 O センサ電源(DC5V(+)) P センサ電源(DC5V(−)) R 電磁ブレーキ電源(DC24V(+)) S 電磁ブレーキ電源(DC24V(−)) T U F.G A C E G J L M N O P R S T U 1 2 3 4 5 6 7 8 9 10 11 12 ステージ側端子機能 1 2 3 モータ 4 5 6 CWLS出力 7 CCWLS出力 8 ORG2出力 9 電源入力(+) 10 ORG1出力 11 電源入力(−) 12 F.G 自動ステージ側のCWLS(6番ピン)とCCWLS(7番ピン)は、通常どおりコントローラのCWLS(L番ピン)とCCWLS(M番ピン)につながり ますが、自動ステージ側のORG2出力(8番ピン)はDC5V(−)に接続され、ORG1出力(10番ピン)はORGと接続してしまいます。つまりこ の結線ではORG2のセンサは機能せず、 ORG1のセンサのみが原点信号としてコントローラに識別されます。結果として、 3個のセンサ(CWLS、 CCWLS、ORG) しか持たない自動ステージと同じ機能となり、原点復帰方法もスリット原点センサを用いない方法で行う必要があります。 ●スリット原点センサ(ORG2)対応ケーブルをご用意いたしました! ※詳細は 1-6015∼をご覧ください。 当シリーズは内部に4個のセンサを標準装備しております。スリット原点センサ(ORG2)を使い、4センサでご使用になる場合は、 『4センサ対 応ケーブル』が必要となります。また、推奨原点復帰方法もタイプが異なりますので、 ご注意ください。 ご注文の型式は「ケーブルコード:5(ケーブルなし)」を選び、4センサ対応ケーブル( 1-6015∼)をご指定ください。 駿河精機OST事業部カスタマーサービス タイミングチャート S S…原点のスリット (検出)間隔 未検出(遮光状態) スリット原点(ORG2) 検出(入光状態) 自 動 ゴ ニ オ 未検出(遮光状態) スリット原点(ORG2) 検出(入光状態) メカストッパ メカストッパ 未検出(入光状態) CCWリミット 検出(遮光状態) 原点センサ(ORG1)未検出(入光状態) 検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) 未検出(入光状態) CCWリミット 検出(遮光状態) 未検出(入光状態) 原点センサ(ORG1) 検出(遮光状態) 未検出(入光状態) CWリミット 検出(遮光状態) (反モータ側)CW スリット原点センサ(ORG2) 反端面 原点端面 CCWリミット スリット遮光板 CWリミット 原点センサ(ORG1) CCW(モータ側) メカ CW 原点 リミット リミット 端面 反 CCW メカ 端面 リミット リミット X XY 単位[deg] CW方向 CWリミット 原点スリット(検出)間隔S 座標基準 KG07-W070A 1.5 9.3 原点復帰 KG07-W096A 1.2 7.3 原点復帰 KG07-W122A 1.0 5.3 原点復帰 ※原点復帰は標準DS102/112シリーズコントローラを用いて原点復帰タイプ4を行った場合 ※座標は設計上の値です。実際には±0.5[deg]程度の寸法誤差が生じることがあります。 CCW方向 反端面 2.1 1.6 1.3 原点 0 0 0 CCWリミット 9.3 7.3 5.3 Z 水平面Z XYZ ゴニオ 原点復帰方法 当社の自動ステージは、型式によってセンサの有無や結線方法が異なります。そのため、推奨以外の原点復帰方法では正しく動作しない場合があります。 当社のコントローラと接続する場合は、推奨原点復帰方法に設定してご使用ください。 ■KG07/KA07 推奨原点復帰方法 回転 ユニット 原点復帰シーケンス 1-6007∼ 制御機器 タイプ 3:CCW方向に検出を行い、 ORG信号のCCW側エッジの検出工程を行います。 タイプ 4:CW方向に検出を行い、 ORG信号のCW側エッジの検出工程を行います。 タイプ 9:タイプ3実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ10:タイプ4実行後、TIMING信号のCW側エッジの検出工程を行います。 ●スリット原点センサ(ORG2)対応ケーブルをご用意いたしました! ※この場合、原点復帰方法は以下からお選びください。 はじめにNORG信号のCW側エッジの検出工程を行い、次にORG信号のCCW側エッジの検出工程を行います。 タイプ1 CCW方向に検出を行い、 はじめにNORG信号のCCW側エッジの検出工程を行い、次にORG信号のCW側エッジの検出工程を行います。 タイプ2 CW方向に検出を行い、 タイプ7 タイプ1実行後、TIMING信号のCCW側エッジの検出工程を行います。 タイプ8 タイプ2実行後、TIMING信号のCW側エッジの検出工程を行います。 ボール ねじ 適応ドライバ・ドライバパック ■ドライバ 1-6013∼ AC100V系入力 DC24V系入力 型式 CRD5107P(¥23,000) SD5107P2-A3(¥12,800) 型式 RKD507-A(¥39,800) 分割数 1∼1/250(16段階) Full/Half 分割数 1∼1/250(16段階) ■ドライバパック 入力電源 1-6011 ※薄型タイプDP112シリーズの接続は専用ケーブルとなります。 筐体タイプ DC24V ウォーム ギヤ ドライバタイプ Full/Half 1∼1/250(16段階) 標準 DP102 (¥48,000) DP102MS (¥78,000) 薄型 DP112 (¥50,000) DP112MS (¥80,000) DP102/112 □ 40 □ 50 適応ステッピングモータコントローラ ■ □ 60 コントローラ 1-6003 入力電源 AC100-240V DC24V □ 70 汎用入出力ポート ドライバタイプ Full/Half 1∼1/250(16段階) なし DS102NR (¥130,000) DS102MS (¥155,000) あり DS102NR-IO(¥140,000) DS102MS-IO(¥165,000) なし DS112NR (¥125,000) DS112MS (¥150,000) あり DS112NR-IO(¥135,000) DS112MS-IO(¥160,000) □ 80 □ 100 □ 120 その他 DS102/112
© Copyright 2026 Paperzz