“多機能エネルギーセンサによる
革新的省電力ソリューション技術の開発“
磁気抵抗効果型電力センシングデバイス
(電力センサ)
大阪市立大学大学院工学研究科
辻本浩章
平成25年度文部科学省大学発新産業創出
支援プログラム「START」
“多機能エネルギーセンサによる
革新的省電力ソリューション技術の開発“
スマートグリッド社会を支える通信ネットワーク対応の超
小型・シンプル構造の新しい集積化 薄膜電力センサによ
る緻密かつ革新的な省電力ソリューションをはかる。
2
電流センサ、電力センサ
電流センサ(電流を検出するセンサ)
カレントトランス(CT)、シャント抵抗 等
•単機能
• 電流
薄膜電力センサ(電力を検出するセンサ)
•多機能
•電力(直流から高周波、高調波電力)
•力率
•電流
3
磁気抵抗効果型電力センサの
特長
超小型
電力量アウトプット
交流・直流可
これまでセンシングできなか
った所でセンシングできる
通信分野
大電流・小電流可
高周波領域可
高調波電力可
電池充放電制御可
太陽電池他
漏電センサ可
発展途上国
の電力事情
モータ制御可
BBPセンサ 試作モデル
(3mm x 3mm)
力率センサ可
簡便配置
スマートメータ
温度補正不要
電力カラリング・センシング可
新しい送電システムの提案
代表的な競合技術であるカレント・トランス(CT)でも、演算回路ユニット等の付属装置と
の組合せによって、本センサと同等の計測・センシングできる が・・・・
4
薄膜電力センサとは
電流:I
交流成分
電流センサ
乗算
電圧:V
電圧センサ
電流:I
電圧:V
瞬時電力
直流成分
皮相電力
V×I
有効電力
V×I×cosθ
電力:P=V×I×cosθ
電力センサ
乗算
A/D
LPF
CPU
直流
電力:
P=V×I×cosθ
リアルタイム
周波数に関わらず一定(直流)
5
電力計測の比較
電流:I
電圧:V
電力
センサ
乗算
リアルタイム
コスト,サイズ
消費電力
電力:V×I×cosθ
直流
LPF
A/D
CPU
データ処理:周波数に関わらず一定
リアルタイム性
本電力センサ
電圧・電流センサを
用いた場合
電圧・電流センサを
用いた場合
本電力センサ
電力、周波数
周波数
6
磁気抵抗効果
磁気抵抗効果:
磁性体に電流を流し、そ
の電流に直行する方向か
ら磁界を印可した場合に
生じる磁性体の電気抵抗
が変化する現象
右図のV1は磁性膜の両端
(電気抵抗)の変化を示
している。通常、適切な
バイアス磁界を印可し、
線形性の良いところで使
用する。
磁界H
強磁性体
磁化M
電流 I
V1
V1
線形部分
磁界H
Hbias
バイアス磁界
異方性磁気抵抗効果
Anisotropic magneto resistance effect
7
バーバーポール型
電力センサチップ
電力センサ
電力センサ
電流
磁界
8
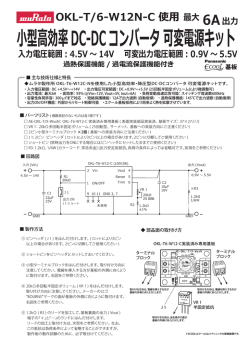
バーバーポール型
電力センサチップ
71.50x10
71.00
3
青
70.95
70.90
71.40
70.80
71.30
70.75
71.25
-200
-100
0
100
200
磁界[Oe]
Sensitivity
x = 5.90 ×10 −5 [% /( A / m)]
ΔR1 −ΔR2
∴ x=
×100 [% /( A / m)]
R1 × H
ΔR1-ΔR2[Ω](計算値)
700
600
赤ー青
500
400
-200
-100
0
100
200
磁界[Oe]
9
3
70.85
71.35
x10
抵抗値[Ω]
赤
71.45
Barber pole 磁性薄膜
Barber pole 磁性薄膜
磁化
磁
界
磁性膜
磁気抵抗効果
Cu
抵抗変化
抵抗変化
磁界
通常の磁性膜
Barber pole膜
10
Barber pole 磁気抵抗効果
Barber pole 磁気抵抗効果
B
A
θ = - 45°
磁気抵抗効果
M
I
I
M
M
I
H
θ=45°
M
M
H
H
A-B
H
H
A
B
11
交流電力測定
電力測定の原理
H
負荷での消費電力
H = α I1
P = Vin I 1
H = α I1
I1 =
電流
磁界
センサ
∆Rmr << R2
I2 ≈
Vin
R1
Vin
R2
∆Rmr = β H = αβ I1
∆Vmr = I 2 ∆Rmr
≈
Vin
⋅ αβ I1 = k ⋅ Vin I1
R2
13
基本波の電力計測
V = V1 sinωt
動作点
R
電流磁界
I1 =
V1
sin(ωt − θ )
R1
I2 =
V1
sinωt
R2
磁性膜の長手方向に直
流電圧が現れる.磁性
膜の長手方向の直流電
圧を計測すれば負荷で
の消費電力(力率を含
む)が測定できることが
分かる
Vmr = ( Rm0 + α β I1 ) I 2
Rm = Rm 0 + ∆ Rm = R m 0 + α β I1
V
V
= Rm0 + α β 1 sin(ωt − θ ) 1 sinωt
R1
R2
R V
V V 1
V V 1
= m0 1 sinωt − α β 1 1 cos(2ωt − θ ) + α β 1 1 cosθ
R2
R1 R2 2
R1 R2 2
V mr = R m I 2 = ( R m 0 + ∆ R m ) I 2
= AC compornent + DC compornent (k ∗ I1 V1 cosθ )
H = α I1
Hbias
∆ R m = β H = β (α I 1 )
= ( Rm 0 + α β I1 ) I 2
H
14
白熱電球の消費電力計測
電力センサ
出力
電力センサ
磁界
電流
50
0
100
磁界
電流
V
A
W
センサ
15
白熱電球の消費電力計測
電力センサ
出力
50
0
V
A
100
W
16
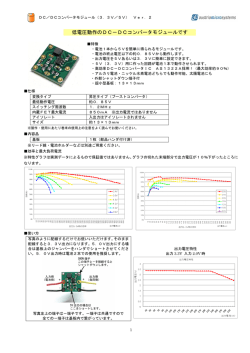
鉛バッテリの充放電計測
17
バッテリー充放電回路
18
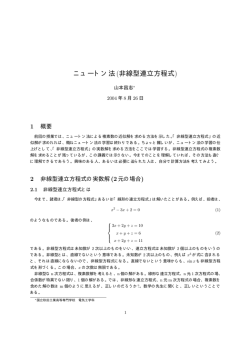
バッテリーからの放電
放電開始時の端子電圧-> 100%
バッテリーの端子電圧が11V:放電終了 -> 0%
電圧
Voltage,
電力
Power,
電力センサ
∆VPHE
1.0
0.8
0.6
Voltage:50%
Votage
■ 電圧
Power
▲ 電力
∆VPHE
● 電力センサ
0.4
0.2
Remain of power:7%
0.0
-0.2
0
10
20
30
Time [min]
40
50
19
鉛蓄電池の充放電サイクル1
1400
800
600
14
1.5
13
1.0
Vbat電圧[V]
電力量[Wh]
1000
ΔVPHE積分[V*min]
1200
-3
センサ出力積分[V*min]
2.0x10
■ 電力量
'ΔVPHE積分[V*min]'
▲ 電圧
'電力量[Wh]'
'電圧[V]'
● 電力センサ
12
400
0.5
200
0
11
0.0
0
50
100
150
200
250
300
時間[min]
20
鉛蓄電池の充放電サイクル2
'VPHE積分[%]'
■ 電力量
'電力量[%]'
▲ 電圧
'電圧[%]'
● 電力センサ
電圧
Power,Vbat,VPHE[%]
電力 電力センサ
120
100
80
60
40
20
0
0
50
100
150
200
250
300
時間[min]
21
高周波電力測定
30
高周波電力計測
磁気抵抗効果型薄膜電力センサでの計測
1MHz、 5V、0.5A、2.5W、力率を含む電力を
測定精度1.5%程度で実測した
低価格
電流センサを用いた電力計測を想定
計測精度 1.5% -> 電圧:0.5%、電流:0.5%、
力率:0.5%
電圧、電流のA/D変換精度:8ビット
サンプリング周波数:10~200MHz
高価
CPU:リアルタイム(10~200MHz)
31
高調波電力測定
32
N次高調波電力の計測
非常に新しい
負荷で消費されている電力に含まれるN次高調波での
消費電力を活線状態で計測できる。
∞
Vn
sin(n ω t − θ n )
R
n=1 1
I1 = ∑
I2 =
I2 =
Vm
sin m ω t
R2
Vm
sin mωt
R2
(m ≤ n)
Vm2
∆Vm = (k ∗
cosθ m )
R1
V=
∞
∑V sin nωt
n =1
n
負荷を流れる電流により発生する磁界により隣接する磁性膜、半導体膜の電気抵抗を変化させ、電源に含まれる
高調波からバンドパスフィルターを通して任意のN次高調波電圧に比例した電流を磁性膜、半導体膜に流すこと
により、磁性薄膜の長手方向、幅方向または半導体薄膜幅方向の直流電圧にはN次高調波電力に比例した電圧
を得ることが出来る。
33
N次高調波電力の計測
V =
∞
∑V
n
sin n ω t
n =1
∞
I1 =
∑
I2 =
Vm
sin m ω t
R2
Vn
sin( n ω t − θ n )
R
n =1 1
ΔVm
V mr = ( R m 0 + α β I 1 ) I 2
= Rm 0 + α β
Vm
Vn
sin( n ω t − θ n ) ⋅
sin m ω t
R
R
n =1 1
2
∞
∑
V m2
cos θ m )
= AC compornent + DC compornent ( k ∗
R1
電圧、電流に高調波を含んでいる場合においても、磁性膜の長手方向の電圧には交流電圧と直流電圧が重
畳されて現れる. 直流電圧成分は高調波による消費電力に比例した直流電圧である。 電圧、電流に高調波
を含んでいる場合,磁性膜の長手方向の直流電圧を計測すればN次高調波での消費電力(力率を含む)を測
定できることが分かる
34
矩形波の高調波計測
高調波計測の応用として、矩形波電流からN次高調波をそれぞれ取り出すことを試みた。
4 ∞ sin{( 2k − 1)2πft} 4
1
1
x square (t ) = ∑
= 1 * sin(2πft ) + * sin(3 * 2πft ) + * sin(5 * 2πft ) + L
π k =1
π
2k − 1
3
5
例:k=5 までの和
(第9高調波までの和)
X1st
X3rd
X5th
X7th
X9th
今回は矩形波(3.8V/100Hz)を負荷に印加し、参照側から4.0V/100~900Hzを
印加することでそれぞれの周波数での出力を計測した。
×
100Hz 矩形波
100Hz
200Hz
300Hz
35
N次高調波電力の計測
4
xsquare (t ) =
π
I1
100Hz 矩形波
I2
=
∞
∑
k =1
sin{(2k − 1)2πft}
2k − 1
4
1
1
1 * sin(2πft ) + * sin(3 * 2πft ) + * sin(5 * 2πft ) + L
π
3
5
100Hz
ΔVm
200Hz
100Hz 矩形波
300Hz
36
矩形波の高調波計測
4
4
0.8
0.2
0
0.0
0
30 60 90
time[sec]
100Hz
Vout
current
1
0.2
0
0.0
0
30 60 90
time[sec]
200Hz
Vout
current
Vout[V]
vout[V]
0.4
2
0.4
1
0.2
0
0.0
0
40 80
time[sec]
300Hz
Vout
current
0.6
2
0.4
3
0.6
2
0.4
1
1
0.2
0.2
0
0
0.0
0.0
0 20 40 60 80
time[sec]
400Hz
Vout
current
0 20 40 60 80
time[sec]
500Hz
Vout
current
参
照
波
100Hz,300Hz,500Hzのときに出力が得られ、200Hz,400Hzのとき、出力は得られなかった。
37
current[A]
1
2
0.6
3
current[A]
0.4
0.6
3
0.8
0.8
current[A]
2
0.8
current[A]
0.6
3
4
4
0.8
current[A]
3
1.0
1.0
Vout[V]
4
vout[V]
1.0
1.0
Vout[V]
1.0
矩形波の高調波計測
1.0
0.9
出力の平均値を、100Hz
のときの出力を基準に
規格化する。
n次高調波は基本波の
1/n倍の強度を持つこと
がわかる
0.8
magnitude
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
300
4
4
0
0.0
0
30 60 90
time[sec]
100Hz
Vout
current
Vout[V]
Vout[V]
1
2
0.4
1
0.2
0.2
0
0.0
0
40
80
time[sec]
300Hz
Vout
current
0
0.0
0 20 40 60 80
time[sec]
500Hz
Vout
current
0.6
2
0.4
1
3
0.6
2
0.4
current[A]
0.2
0.4
0.6
0.8
0.8
3
current[A]
1
2
3
current[A]
0.4
0.6
1.0
4
0.8
current[A]
2
current[A]
0.6
900
4
0.8
3
800
1.0
4
0.8
3
700
1.0
1.0
1.0
vout[V]
400
500
600
frequency[Hz]
Vout[V]
200
Vout[V]
100
1
0.2
0
0.0
0 time[sec]100
700Hz
Vout
current
0.2
0
0.0
0 20 40 60 80
time[sec]
900Hz
Vout
current
38
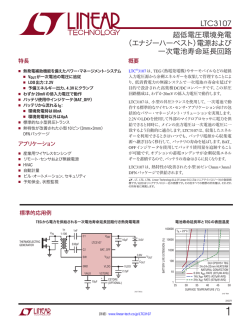
誘導モータの消費電力計測
39
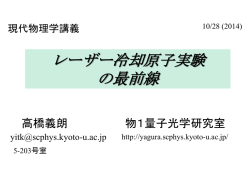
誘導電動機の入力皮相電力と有
効電力と力率(例)
120
1.00
VI
Power factor(W/VI)
W=VI
110
0.95
90
0.90
Power/VI
VI [VA]
100
80
0.85
70
60
0.80
60
70
80
90
Power [W]
100
110
120
40
55
110
50
100
45
90
40
80
35
70
80
90
100
Apparent power [VA]
Active power [W]
Sensor output [mV]
誘導電動機の入力皮相電力に対するセン
サ出力と有効電力(電動機での消費電力)
110
誘導電動機の入力皮相電力に対するセンサ出力と有効電
力(電動機での消費電力)
41
誘導モータの消費電力計測
磁界
電流
誘導モータ
電流
直流発電機
HP3478
センサ出力
42
誘導モータの消費電力計測
電流
センサ
電力計
センサ
43
© Copyright 2026 Paperzz