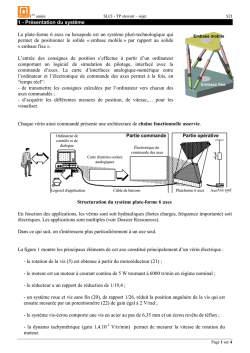
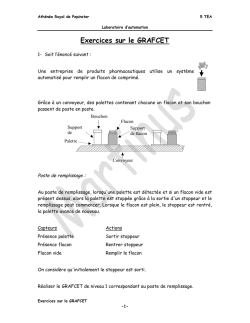
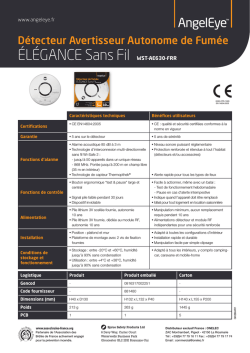
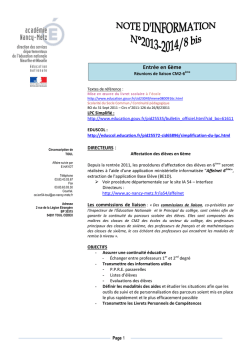
NOM : VERSION PROFESSEUR Livret de cours Classe de 1 BAC ELEEC – 1ère Période ère Electrotechnique Energie et Equipements Communicants 11èèèrrreee P Paarrttiiee Motorisation électrique et modes de démarrages m meee Partie 22èèèm Partie L’automatisation industrielle JM. CHATELET O. GOIFFON 2009-2010 11èèèrrreee P Paarrttiiee Motorisation électrique et modes de démarrages S SO OM MM MA AIIR RE E Leçon 1 : Structures des départs moteurs ................................................................................................................... 2 1 – Extraits du dossier technique du palan .................................................................................................................... 2 2 – Structure générale d’un départ moteur .................................................................................................................... 3 3 – La solution « 3 produits »......................................................................................................................................... 4 4 – La solution « 2 produits »......................................................................................................................................... 5 5 – La solution « 1 produit » .......................................................................................................................................... 5 Leçon n°2 – Le Moteur asynchrone triphasé ................................................................................................................ 6 1 – Constitution .............................................................................................................................................................. 6 2 – Principe de fonctionnement ..................................................................................................................................... 6 3 – Plaque signalétique ................................................................................................................................................. 7 4 – Plaque à bornes ....................................................................................................................................................... 8 5 – Couplages ................................................................................................................................................................ 9 6 – Caractéristiques d’un moteur asynchrone triphasé. .............................................................................................. 13 Leçon n°3 – Démarrages des moteurs asynchrones triphasés ............................................................................... 14 1 – Rappel : Démarrage direct (avec inversion du sens de rotation) .......................................................................... 14 2 – Démarrage étoile-triangle ...................................................................................................................................... 15 3 – Démarrage par élimination de résistances statoriques ......................................................................................... 18 4 – Démarrage par élimination de résistances rotoriques ........................................................................................... 19 Leçon n°4 – Démarrages électroniques – démarreurs progressifs ......................................................................... 20 1 – Représentation et raccordement ........................................................................................................................... 20 2 – Principe .................................................................................................................................................................. 21 3 – Choix d’un démarreur progressif ........................................................................................................................... 21 Leçon n°5 – Etude de la chaîne cinématique d’un système ..................................................................................... 22 1 – Le réducteur ........................................................................................................................................................... 22 2 – Vitesse ................................................................................................................................................................... 23 3 – Force, poids et masse ........................................................................................................................................... 24 4 – Couple.................................................................................................................................................................... 24 5 – Puissance .............................................................................................................................................................. 24 6 – Exemple : Etude mécanique d’un monte-charge................................................................................................... 25 Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 1 Leçon 1 : Structures des départs moteurs 1 – Extraits du dossier technique du palan Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 2 2 – Structure générale d’un départ moteur Un départ moteur comprend quatre fonctions de base : le sectionnement (éventuellement l’interruption) la protection contre les courts circuits la protection contre les surcharges (= protection thermique) la commutation ou commande Alimentation électrique Sectionnement, interruption, consignation Protection contre les courts-circuits Protection contre les surcharges Armoires électrique Coffrets Commutation Démarrage direct Démarrage progressif Variation de vitesse Machines Fonctions complémentaires : défaut d’isolement température contrôle des phases Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 3 Un départ moteur doit prendre en compte toute les fonctions décrites précédemment. Cependant, il existe plusieurs solutions matérielles pour remplir ces fonctions : les départs moteurs avec trois appareils, avec deux appareils et avec un seul appareil. 3 – La solution « 3 produits » 3-1) Avec sectionneur ou interrupteur-sectionneur à fusibles C’est la solution « à l’ancienne » : classique et économique. (Interrupteur) sectionneur à fusibles Protection contre les courts-circuits Contacteur Relais thermique D’après Schneider U V W M 3~ 3-2) Avec disjoncteur magnétique Disjoncteur magnétique I> I> I> Protection magnétique Contacteur Relais thermique D’après Schneider U V W M 3~ Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 4 4 – La solution « 2 produits » Toutes les fonctions nécessaires à un départ moteur sont regroupées dans 2 appareils. C’est la solution classique pour un nouveau départ moteur. Disjoncteur magnétothermique Protection thermique I> I> I> Protection magnétique Contacteur U V W D’après Schneider M 3~ 5 – La solution « 1 produit » Toutes les fonctions nécessaires à un départ moteur sont regroupées dans 1 appareil. Sectionnement A2 A1 Contacteur-disjoncteur « intégral » Commutation I>> I>> I>> Protection courts-circuits Liaison par broches I> I> I> U V Protection thermique W M 3~ Protection magnétique D’après Schneider Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 5 Leçon n°2 – Le Moteur asynchrone triphasé Les moteurs asynchrones triphasés représentent plus de 80% du parc moteur transformer l’énergie électrique en énergie mécanique grâce à des phénomènes électromagnétiques. C’est une machine robuste, économique à l’achat et nécessitant peu de maintenance. De plus, la vitesse de rotation est presque constante sur une large plage de puissance. électrique. Ils sont utilisés pour 1 – Constitution D’après Leroy-Somer 1. Rotor 2. Stator 3. Bobinage statorique 4. Plaque signalétique 5. Plaque à bornes 6. Ventilateur 7. Flasque arrière 8. Flasque avant 9. Clavette 10. Capot de ventilateur 2 – Principe de fonctionnement Le stator supporte trois enroulements, décalés de 120°, alimentés par une tension alternative triphasée. Ces trois bobines produisent un champ magnétique variable qui a la particularité de tourner autour de l’axe du stator la fréquence d’alimentation. suivant Ce champ magnétique est appelé de la tension champ tournant. Le champ tournant (statorique) vient induire des courants dans le rotor et leur interaction entraîne la rotation du rotor à une fréquence légèrement inférieure à celle du champ tournant (Voir cours d’électrotechnique). Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 6 3 – Plaque signalétique Sur la plaque signalétique du moteur sont gravées les principales caractéristiques du moteur. Classe d’isolement 14 13 1 Référence Moteur Constructeur LEROY SOMER Indice de protection 12 11 Mot. 3 ~ LS 250 MP 2 Service 3 Masse T NY 125089HA001 Kg 340 IP55 IK08 I cl. F 40°C S1 94 % c/h V Hz Min-1 kW Cos A Y Couplage Tension du réseau Conforme aux normes C.E. 4 15 Rendement Intensités nominales 5 10 6 Fréquence de la tension du réseau Facteur de puissance 9 8 Vitesse de rotation 7 Puissance mécaniques 3-1) Types de service Code Type de service Graphique (fonctionnement en fonction du temps) N S1 Continu t N S2 N Temporaire t C S3 Intermittent périodique N R N R N R N R t S4 Intermittent périodique à démarrage C C D D N R N t Légende : N : fonctionnement à charge constante R : temps de repos C : durée d’un cycle D : démarrage Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 7 3-2) Rendement I U PM ou PU PA Cos Côté électrique (réseau) : Côté mécanique (charge) : PA : Puissance PM : Puissance absorbée Avec PA = 3 x U x I x cos = P U / PA mécanique PU : Puissance utile Très important : la puissance mécanique qui est indiquée sur la plaque signalétique du moteur. C’est toujours 4 – Plaque à bornes située dans la boîte à bornes, que se connectent, à l’aide de cosses, les enroulements et l’alimentation du moteur. C’est sur la plaque à bornes Reliez les 3 enroulements à leurs bornes respectives. Remarque : toujours décalées afin de pouvoir réaliser plus facilement le couplage. Les bornes sont Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 8 5 – Couplages Le couplage des enroulements statoriques permet de faire fonctionner les moteurs asynchrones sous deux tensions. Il est fonction de la tension du réseau et de la tension que peuvent supporter les enroulements. Le couplage est réalisé par une connexion, à l’aide de barrettes, sur la plaque à bornes. 5-1) Couplage étoile L2 L1 U1 U2 V1 V2 W1 W2 V2 L3 V1 L1 U2 Symbole : Y ou Y L2 W 2 W 1 U1 L3 Position des barrettes de couplage sur la plaque à bornes. 5-2) Couplage triangle V2 W1 W2 L3 U2 V1 L2 L2 V1 2 U2 U1 L1 U1 W L1 V2 L3 Symbole : ou D Couplage ETOILE Position des barrettes de couplage sur la plaque à bornes. Couplage TRIANGLE Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 9 5-3) Choix du couplage Si le couplage est clairement indiqué sur la plaque signalétique Il suffit de regarder le couplage qui correspond à la tension de notre réseau électrique. Exemple : Pour le moteur si contre, si nous avons un réseau triphasé 400 V (c'est-à-dire un réseau 230/400V), alors il faudra effectuer un couplage Triangle. Rappel très important : La tension du réseau qui est indiquée correspond à la valeur de tension entre deux phases ! Il s’agit ici d’un moteur 400 / 690 V Si le couplage n’est pas clairement indiqué sur la plaque signalétique Prendre la plus grande tension du réseau : Si la tension entre phase correspond à la plus grande du moteur : couplage Y Si la tension entre phase correspond à la plus petite du moteur : couplage Tensions maximum supportés par les enroulements Moteur 130 / 230 V 230 / 400 V 400 / 693 V 130 / 230 V Y Sous-alimenté 230 / 400 V Impossible Y 400 / 690 V Impossible Impossible Y RESEAU Tension entres phases Tensions entre phase et neutre ( V = U / 3 ) Exemple : Un moteur 400/700 V sera branché en triangle sur un réseau triphasé 400V entre phases. Exercice 1 : Un réseau 3 x 400 V – 50 Hz alimente un moteur. Sur sa plaque signalétique on peut lire les tensions 230 V et 400 V. Quel est le couplage à effectuer pour que le moteur fonctionne normalement ? Réponse : Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 10 Exercice 2 : Donnez les couplages à effectuer pour les cas suivants : Réseau d’alimentation Triphasé 400V Triphasé 400 V 230 / 400 V Triphasé 230 V Triphasé 230 V Indications plaque signalétique du moteur 230 / 400 V 400 / 690 V 230 / 400 V 230 / 400 V 400 / 690 V Couplage à effectuer Exercice 3 : Donnez le repérage des bornes d’un moteur asynchrone triphasé ainsi que le raccordement des enroulements : Exercice 4 : Donnez la position des barrettes sur la plaque à bornes d’un MAS triphasé suivant le couplage : Triangle Etoile Exercice 5 : Donnez le couplage à effectuer pour le moteur dont on a représenté la plaque signalétique ci-dessous. Le réseau d’alimentation est 230 / 400 V – 50 Hz. Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 11 Exercice 6 : Un moteur alimenté par un réseau 400 V triphasé 50 Hz comporte une plaque signalétique dont les indications concernant la tension ont été effacées. Sachant que le couplage est en triangle, donnez les valeurs des indications effacées. Le rendement est de 80 % pour In. Exercice 7 : Sur la plaque signalétique d’un moteur on trouve plusieurs indications. Donnez la signification de chacune : Indication Signification LS 90 L 50 Hz IP 45 IK 08 Classe F 40°C S3 1430 min -1 1,5 kW Exercice 8 : Un moteur asynchrone triphasé porte entre autres indications 400 / 690 V. Il est alimenté par un réseau 230 / 400 V. Quel est le couplage à réaliser ? Représentez la position des barrettes sur la plaque à bornes. Un moteur asynchrone triphasé porte entre autres indications 230 / 400 V. Il est alimenté par un réseau triphasé 400 V. Quel est le couplage à réaliser ? Représentez la position des barrettes sur la plaque à bornes. Etoile Triangle Etoile Triangle Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 12 6 – Caractéristiques d’un moteur asynchrone triphasé. Les principales caractéristiques d’un moteur asynchrone triphasé sont : Le moment du couple nominal, TN en Nm (Newton mètre). La fréquence de rotation N en tr.min-1 ou tr/min. L’intensité absorbée I en A. I (A) T (Nm) ID ID : courant de démarrage IN : courant nominal I0 : courant à vide TD : couple de démarrage TN : couple nominal TM : couple maximal TM TD TN IN N (tr.min-1) I0 NN NA L’ensemble de ces caractéristiques et le moment du couple résistant définissent le point de fonctionnement du moteur (quand il fonctionne à 100% de sa capacité : voir caractéristiques sur la plaque signalétique). En fonctionnement établi, pour que le système entraîné par le moteur fonctionne correctement, il faut que le couple moteur TM soit égal au couple résistant TR. Au démarrage, lorsque TM est supérieur à TR, le système accélère. En régime établi, TM est égal à TR. Allure du couple résistant (TR) en fonction de la vitesse L’allure du couple dépend de la nature de la charge entraînée. Machines à couple constant Machines centrifuges Couple Couple Vitesse TR reste constant dans une large plage de vitesse Machines à puissance constante Couple Vitesse TR varie suivant le carré de la vitesse Vitesse TR décroît dans la plage de vitesse Exemple : Exemple : Exemple : Transporteur à bande ventilateur compresseur Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 13 Leçon n°3 – Démarrages des moteurs asynchrones triphasés 1 – Rappel : Démarrage direct (avec inversion du sens de rotation) Remarque : Pour inverser le sens de rotation d’un moteur asynchrone triphasé, il faut permuter deux phases d’alimentation. Représentation simplifiée Diagramme de fonctionnement 1 S0 0 t 1 S1 0 t 1 S2 0 M 3~ t 1 KM1 0 t 1 KM2 0 t 1 M 0 t Schéma de puissance Schéma de commande L1 F1 L2 L3 3 5 2 4 6 1 3 5 2 4 6 2 4 6 KM1 F1 KM2 KM 2 KM1 KM2 5 S2 3 S1 1 KM1 Q1 S0 1 U V W M 3~ KM1 KM2 Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 14 Problème constaté avec un démarrage direct : Lors du démarrage d’un moteur asynchrone triphasé, une pointe d’intensité (dégressive) apparaît dans la ligne le temps du démarrage. Ce courant de démarrage Id peut atteindre de 6 à 10 fois le courant nominal In. Allure temporelle du courant en démarrage direct I = f(N) et T = f(N) Outre l’échauffement des conducteurs et le vieillissement prématuré du matériel, cette pointe d’intensité peut poser un autre problème de taille : le déclenchement intempestif du dispositif magnétique lors du démarrage du moteur… Cela est très ennuyeux, mais une des solutions est la suivante : le démarrage étoile triangle. 2 – Démarrage étoile-triangle Principe Le principe est de sous-alimenter le moteur au démarrage afin d’éviter Le démarrage se fait alors en deux étapes : ère 1 étape : couplage Etoile L1 L2 ème 2 U1 étape : couplage Triangle U2 V1 L1 V2 W1 U1 U2 V1 V2 W1 W2 L2 W2 L3 la pointe d’intensité. L3 Moteur 400 / 690 V Moteur 400 / 690 V Pour un réseau triphasé 400 V, chaque enroulement sera Pour un réseau triphasé 400 V, chaque enroulement sera d’abord soumis à une tension de 230 ensuite soumis à une tension de 400 V. V. Inconvénient : Le fait de sous-alimenter le moteur au départ a pour conséquence de réduire le couple de démarrage. Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 15 Pour pouvoir changer de couplage lors du démarrage, le couplage ne doit pas être réalisé dans la boîte à bornes du moteur, mais dans le coffret de commande grâce à des contacteurs. Il faut donc sortir les six bornes du moteur, et deux contacteurs seront nécessaires pour les couplages : Un contacteur pour le couplage étoile et un autre contacteur pour le couplage triangle. Représentation simplifiée Diagramme de fonctionnement 1 S0 0 t 1 S1 0 t 1 KM1 0 t 1 KM2 0 M 3~ t 1 KM3 0 t 1 M 0 t 6 s. Schéma de puissance (simplifié) Schéma de commande L1 L2 F1 L3 3 5 2 4 6 1 3 5 2 4 6 KM 2 S1 KM2 S0 Q1 1 KM1 KM2 (6S.) F1 55 U1 V1 W1 1 3 5 1 3 5 2 4 6 2 4 6 KM1 KM3 56 KM 1 W2 U2 V2 KM 3 V M 3~ KM1 KM3 KM2 Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 16 Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 17 3 – Démarrage par élimination de résistances statoriques Représentation simplifiée Diagramme de fonctionnement 1 S0 0 t 1 S1 0 t 3 1 KM1 0 t 1 KM2 M 3~ 0 t 1 KM3 0 t 1 M 0 t Tempo KM1 Tempo KM2 Tempo KM3 Schéma de puissance Schéma de commande L1 L2 L3 3 5 2 4 6 1 3 5 1 3 5 1 3 5 2 4 6 2 4 6 2 4 6 F1 56 KM1 67 KM2 67 KM1 KM3 R2 55 KM3 S1 KM1 KM 1 R1 KM 2 KM 3 S0 Q1 F1 1 68 KM2 68 KM3 U V W M 3~ Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 18 4 – Démarrage par élimination de résistances rotoriques Représentation simplifiée Diagramme de fonctionnement 1 S0 0 t 1 S1 0 t 1 M 3~ KM1 0 t 1 KM2 0 t 3 1 KM3 0 t 1 M 0 t 10 s. 5 s. Schéma de puissance Schéma de commande L1 L2 L3 3 5 2 4 6 1 3 5 2 4 6 S0 KA1 Q1 F1 1 3 5 R1 F1 67 KM2 5S. KM1 10S. 6 KA1 4 KM 2 2 KA1 67 S1 KM 1 1 68 68 U V W V M 3~ 3 5 R2 1 KA1 KM1 KM2 KM3 X Y Z 4 6 KM 3 2 Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 19 Leçon n°4 – Démarrages électroniques – démarreurs progressifs remplace de plus en plus les autres types de démarrage sur toute la gamme de puissance. Ce type de démarreur 1 – Représentation et raccordement Représentation simplifiée Exemple de raccordement selon le constructeur M 3~ Schéma de puissance Schéma de commande L1 L2 F1 L3 3 5 2 4 6 1 3 5 2 4 6 KM1 S0 F1 S1 KM 1 Q1 1 Démarreur électronique U V W M 3~ KM Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 20 D’après Schneider 2 – Principe Le démarreur va augmenter progressivement la tension efficace appliquée au moteur. Cela a pour conséquence de limiter le couple au démarrage, et donc de limiter le temps de démarrage et la pointe d’intensité au démarrage. Exemple avec une rampe de démarrage réglée à 10 secondes : v2 = f (t) v2 = f (t) 300 300 200 200 100 100 v2 (V) 400 v2 (V) 400 0 0 -100 -100 -200 -200 -300 -300 -400 -400 t (ms) t (ms) Allure de la tension à t = 2 s. Allure de la tension à t = 4 s. v2 = f (t) 400 300 300 200 200 100 100 v2 (V) v2 (V) v2 = f (t) 400 0 0 -100 -100 -200 -200 -300 -300 -400 -400 t (ms) t (ms) Allure de la tension à t = 6 s. Les démarreurs électroniques sont des convertisseurs de type Allure de la tension à t = 9 s. gradateur à angle de phase. 3 – Choix d’un démarreur progressif Extrait catalogue Schneider – Télémécanique Le choix d’un démarreur progressif se fera en fonction de : La puissance du moteur (soit le courant nominal qu’il absorbe) La tension du réseau Les possibilités de réglage La présence éventuelle d’entrées ou de sorties logiques Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 21 Leçon n°5 – Etude de la chaîne cinématique d’un système Sur de nombreux systèmes industriels, le processus n’utilise pas directement un mouvement de rotation à la vitesse de rotation du moteur (ex : 1500 tr/min), mais plus souvent un mouvement de rotation à faible vitesse (ex : barrière de péage) ou un mouvement de translation à faible vitesse (ex : déplacement du palan sur le rail). La réduction de la rotation ou sa transformation en mouvement de translation se fait par un jeu d’engrenages, pignons, galets, etc. L’étude de la chaîne cinématique d’un système est l’étude des mouvements mécaniques de ce système. Elle permet d’aboutir au choix d’un moteur ou d’un motoréducteur. 1 – Le réducteur Un réducteur permet de réduire Réducteur axial la vitesse de rotation entre son arbre d’entrée et son arbre de sortie. Réducteur à renvoi d’angle Groupe motoréducteur = moteur + réducteur Un réducteur se caractérise par : Son rapport de réduction r (rapport entre vitesses de sortie et d’entrée). r = nS / nE nS = vitesse de rotation en sortie de réducteur nE = vitesse de rotation en entrée de réducteur (Les vitesses de rotations doivent avoir la même unité : tr/min ; tr/s ou rad/s) Le rapport de réduction est toujours inférieur à 1, mais il est souvent noté de la façon suivante sur les plaques signalétiques: « 1/ valeur ». Il s’agit alors de l’inverse du rapport de réduction (soit nE / nS). Pour le palan (plaque ci-contre) le rapport de réduction vaut alors : r = 1 / 4,7 = 0,213 Si le réducteur a pour effet de diviser la vitesse à sa sortie, il a aussi pour effet de multiplier le couple à sa sortie. Le rapport de couple correspond au rapport des vitesses, mais à l’inverse. Autrement dit : r = TE / TS TS = Couple disponible en sortie de réducteur TE = Couple appliqué en entrée de réducteur La notion de couple est détaillée au paragraphe 3… Son rendement (rapport entre les puissances de sortie et d’entrée) Comme tout système mécanique, la rotation du réducteur engendre des frottements et donc des pertes sous forme de chaleur. Il y a donc une petite perte de puissance entre la puissance fournie en entrée et celle récupérée en sortie de réducteur. = PS / PE PS = Puissance disponible en sortie de réducteur PE = Puissance appliquée en entrée de réducteur Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 22 Il est nécessaire de bien comprendre la signification de quelques grandeurs mécaniques : 2 – Vitesse Vitesse linéaire Vitesse angulaire Définition : C’est la distance parcourue par un objet en translation, en un certain temps. Définition : C’est l’angle effectué par un objet en rotation, en un certain temps. Dans les relations de mécanique, la vitesse linéaire Dans les relations de mécanique, la vitesse angulaire se note V, et elle est exprimée en m/s. se note et elle est exprimée en rad/s. d Une voiture parcoure une distance « d » pendant une durée « T ». Sa vitesse angulaire moyenne « »vaut alors : Sa vitesse linéaire moyenne « V » vaut alors : V=d La roue d’une voiture effectue une rotation de « » radians pendant une durée « T ». =/T /T Exercice : Si la voiture a parcouru 20 km en 20 minutes, quelle a été sa vitesse moyenne (en m/s) ? Exercice : Si la roue a effectué 500 tours en une minute, quelle a été sa vitesse angulaire moyenne (en rad/s) ? Réponse : Réponse : V = 20000 / (20 x 60) = 20000 / 1200 = 16,7 m/s (soit 60 km/h). = 500 x (2 / 60) = 52,4 rad/s Rapport entre vitesses linéaire et angulaire De nombreux ensembles mécaniques permettent de transformer un mouvement de rotation en mouvement de translation, ou inversement : Liaison galet-rail Liaison pignonLiaison Treuil-Câble Liaison vis sans fin crémaillère = vitesse angulaire du galet V = vitesse de déplacement du galet sur le rail R = rayon du galet = vitesse angulaire du pignon V = vitesse de déplacement de la partie mobile R = rayon du pignon = vitesse angulaire du tambour de treuil V = vitesse de déplacement du câble R = rayon du tambour D = distance parcourue par le plateau N = nombre de tours effectués par l’arbre V = vitesse linéaire du plateau n = fréquence de rotation de l’arbre en tr/s P = pas de vis de l’arbre V=xR D=NxP V=nxP Exercice : La voiture parcoure 20 km en 20 minutes à vitesse constante et ses roues tournent à 500 tr/min. Calculer le diamètre de ses roues : R = V / = 16,7 / 52,4 = 0,319 m soit R = 32 cm environ Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 23 3 – Force, poids et masse Il est très important de bien distinguer deux notions bien différentes : la masse et le poids d’un objet : La masse est une caractéristique constante d’un objet : un marteau aura une masse identique sur la terre et sur la lune. Le poids représente la force d’attraction de l’objet vers le sol : le marteau a un poids environ six fois plus important sur la terre que sur la lune. Le poids est donc une force, et sa valeur dépendra du lieu où l’objet se situe. Le poids est donné par la relation suivante : P=M.g avec : P = Poids de l’objet en Newton (N) M = Masse de l’objet en Kg g = Coefficient d’accélération de la pesanteur en m/s² Dans notre région, g = 9,81 m/s² Exercice : Quelle force faut-il appliquer vers le haut pour lever un panier de 8 kg ? P = M . g = 8 x 9,81 = 78,5 N. Il faut donc F > 78,5 N 4 – Couple F/2 r Lorsqu’on applique une force sur un bras de levier, l’objet en rotation bénéficie sur son axe d’un certain couple tel que : T=Fxr r F/2 F avec : T = Couple en Newton-mètre (N.m) F = Force appliquée (en N) r = Longueur du bras de levier (ou rayon de roue) en m Exercice : Quelle force faut-il appliquer sur une sur clé de 10 cm pour serrer un écrou à 4 N.m ? Et quelle est la force à appliquer si on dispose d’une clé de 40 cm ? F=T/r = 4 / 0,1 = 40 N avec une clé de 10 cm = 4 / 0,4 = 10 N avec une clé de 40 cm 5 – Puissance La puissance d’une source d’énergie mécanique décrit sa capacité à transmettre une force à une certaine vitesse, ou un couple à une certaine vitesse de rotation. Pour un mouvement linéaire : P= FxV avec : P = Puissance transmise à l’objet (en W) N) V = Vitesse linéaire de l’objet (en m/s) F = Force appliquée à l’objet (en Pour un mouvement de rotation : P= Tx avec : P = Puissance transmise à l’objet (en W) T = Couple appliqué à l’objet (en N) = Vitesse angulaire de l’objet (en m/s) Exercice : Quel couple transmet un moteur de 1,5 kW (puissance mécanique) à une vitesse de 1500 tr/min ? T = P / = 1500 / (1500 x 2 / 60) = 9,55 N.m Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 24 6 – Exemple : Etude mécanique d’un monte-charge Caractéristiques techniques : Soit M = 1500 kg Soit V = 0,25 m/s Soit R = 0,1 m Masse de l'ensemble (cabine + charge) M = 1,5 Tonne. Vitesse linéaire nominale du monte-charge : V = 15 m/min. Diamètre d'enroulement moyen du câble = 200 mm. Rendement du réducteur : = 0,9 On considère que le rendement du treuil est de 1. Rapport de réduction : R = 1/125. 1 = vitesse angulaire à l'entrée du réducteur. 2 = vitesse angulaire à la sortie du réducteur. Alimentation triphasée 3 x 400 V + N. On demande : 1. Calculer la vitesse angulaire 2. Le monte-charge, donc le câble se déplace à une vitesse V = 0,25 m/s Le tambour du treuil doit donc tourner à une vitesse angulaire 2 = V / R 2 = 0,25 / 0,1 = 2,5 rad/s 2 2. Quel est le couple à la sortie du réducteur ? (prendre g = 10 m/s ) Pour lever la charge, la force exercée sur le câble doit être : F = P = M x g = 1500 x 10 = 15000 N Le couple sur l’axe du tambour doit donc être T = F x R T = 15000 x 0,1 = 1500 Nm 3. Calculer la puissance utile à la sortie du réducteur. La puissance nécessaire pour faire tourner le tambour sera donc : P = T x 2 P = 1500 x 2,5 = 3750 W 4. Calculer la vitesse angulaire 1, et la vitesse de rotation du moteur Nm en tr/min. 1 = 2 x 125 = 312,5 Nm Soit Nm = 321,5 x (60/2) = 3070 tr/min 5. Calculer la puissance utile du moteur. P= Livret de cours 1ère BAC ELEEC – Motorisation électrique et modes de démarrages 25 m meee Partie 22èèèm Partie L’automatisation industrielle S SO OM MM MA AIIR RE E Leçon n°6 – Logique combinatoire ............................................................................................................................. 27 1 – Equation Logique du fonctionnement .................................................................................................................... 27 2 – Schéma électrique ................................................................................................................................................. 28 3 – Table de vérité ....................................................................................................................................................... 29 4 – Logigramme ........................................................................................................................................................... 30 5 – Simplification des équations logiques .................................................................................................................... 32 6 – Lois de l’algèbre de Boole ..................................................................................................................................... 33 Leçon n°7 – Logique séquentielle - GRAFCET........................................................................................................... 38 1 – Niveaux de GRAFCET. .......................................................................................................................................... 38 2 – SYMBOLES ........................................................................................................................................................... 39 3 - Aiguillages et sauts d’étapes .................................................................................................................................. 41 4 – Règles d’évolution du Grafcet................................................................................................................................ 43 Leçon n°8 – Eléments d’automatisme ......................................................................................................................... 44 1 – Relais auxiliaires .................................................................................................................................................... 44 2 – Détecteurs.............................................................................................................................................................. 48 Leçon n°9 – Composants pneumatiques .................................................................................................................... 56 1 – Installations pneumatiques .................................................................................................................................... 56 2 – Système à vérin simple effet.................................................................................................................................. 57 3 – Commande par distributeur 2/2. ............................................................................................................................ 58 4 – Commande par distributeur 3/2. ............................................................................................................................ 59 5 – Vérin double effet ................................................................................................................................................... 60 6 – Symboles pour les schémas de pneumatique ....................................................................................................... 62 7 – Production et traitement de l’air comprimé ............................................................................................................ 63 Le Régulateur .............................................................................................................................................................. 64 Leçon n°10 – Automates Programmables Industriels (A.P.I) ................................................................................... 66 1 – Intérêt et principe des Automates Programmables ............................................................................................... 66 2 – Structure d’un Automate Programmable ............................................................................................................... 68 3 – Raccordement d’un API ......................................................................................................................................... 70 4 – Choix d’un automate .............................................................................................................................................. 72 Leçon n°11 – Programmation des Automates Industriels ........................................................................................ 73 1 – Terminal de programmation................................................................................................................................... 73 2 – Démarche de programmation d’un API ................................................................................................................. 73 3 – Les langages de programmation ........................................................................................................................... 74 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 26 Leçon n°6 – Logique combinatoire Nous allons utiliser à titre d’exemple le système « distributeur de colorants » présenté ci-dessous. Ce système crée et conditionne en pots différentes couleurs de colorants. Colorant Bleu Colorant Jaune Légendes : Y1 Y2 M S2 Pot de mélange S3 Y1 = électrovanne pour le colorant bleu Y2 = électrovanne pour le colorant jaune S1 = détecteur de présence d’un pot S2 = détecteur de pot rempli S3 = bouton poussoir de sélection du bleu S4 = bouton poussoir de sélection du jaune S5 = bouton poussoir de sélection du vert M = moteur du mélangeur S4 S5 S1 Ce système permet de remplir des pots de colorant. Suivant la sélection, les pots peuvent être remplis de colorant bleu, jaune ou vert (mélange du bleu et du jaune). Après avoir mis le pot de réception en place, l’opérateur sélectionne la couleur désirée en appuyant sur un bouton poussoir (S3, S4 ou S5). Tant que l’opérateur maintient son action sur la sélection, le produit s’écoule dans le pot jusqu’à ce qu’il soit rempli. Pendant toute cette opération, un mélangeur brasse le produit à l’intérieur du pot. Fonctionnement des électrovannes : Si la sélection est le bleu, l’électrovanne Y1 s’ouvre. Y2 s’ouvre. Si la sélection est le vert, les électrovannes Y1 et Y2 s’ouvrent. Si la sélection est le jaune, l’électrovanne 1 – Equation Logique du fonctionnement Exemple : fonctionnement du moteur du mélangeur. il y a la présence d’un pot ET si ce pot n’est PAS rempli ET si l’opérateur a sélectionné la couleur bleue OU la couleur jaune OU la couleur verte. Le mélangeur M fonctionne si : Le moteur du mélangeur fonctionne donc si nous avons : S1 et pas S2 et (S3 ou S4 ou S5). Convention : - un point « . » La fonction OU est appelée somme logique et se présente par un plus « + ». La fonction PAS se représente avec un trait au dessus (dit barre) « a\ ». La fonction ET est appelée produit logique et se représente par S=a+b se lit S = c . d\ se lit S égal a OU b L égal c ET d barre Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 27 L’équation logique de notre moteur devient : M = S1 . S2\ . (S3 + S4 + S5) Dans cette équation : M est appelée variable de sortie. S1, S2, S3, S4, S5 sont appelées variables d’entrée. 2 – Schéma électrique L’équation déterminée précédemment peut être traduite en schéma électrique. La fonction ET symbolise des variables en SERIE. La fonction OU symbolise des variables en DERIVATION. La fonction PAS inverse l’état d’une variable. S3 M S2 S4 S1 M = S1 . S2\ . (S3 + S4 + S5) S5 Exercice 1 : Complétez les expressions logiques suivantes : pot et si ce pot n’est pas et si l’opérateur a sélectionné la couleur bleue ou la couleur verte. L’électrovanne Y1 est ouverte s’il y a détection de la présence d’un rempli s’il y a détection de la présence d’un pot et si ce pot n’est pas rempli et si l’opérateur a sélectionné la couleur jaune ou la couleur verte. L’électrovanne Y2 est ouverte Exercice 2 : Complétez les équations logiques suivantes : Pour l’électrovanne bleue Y1. Y1 = . .( + Pour l’électrovanne jaune Y2. ) Y2 = Tracez les schémas à contacts correspondants aux deux équations ci-dessus : Y1 Y2 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 28 3 – Table de vérité En logique combinatoire, l’état des variables de sortie (relais, contacteur, électrovanne, voyant, …) est défini par une combinaison des variables d’entrées (boutons poussoirs, détecteurs,…). Aaaahhh…. L’automatisation… toutes les combinaisons possibles des variables d’entrées et d’associer l’état correspondant des variables de sortie. La table de vérité permet de répertorier n La table de vérité possède 2 lignes (n représentant le nombre de variables d’entrée). L’état de chaque variable d’entrée est noté : - 0 lorsque la variable n’est pas actionnée 1 lorsque la variable est actionnée L’état de chaque variable de sortie est noté : - 0 lorsque la variable ne fonctionne pas 1 lorsque la variable fonctionne Exemple : Equation logique du mélangeur M = S1 . S2\ . (S3 + S4 + S5) Schéma électrique : S3 S2 S1 M S4 S5 S1 S2 S3 S4 S5 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 1 1 0 0 1 0 0 0 0 1 0 1 0 0 1 1 0 0 0 1 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 M Table de vérité du mélangeur 5 Il y a 5 variables d’entrées donc 2 = 2 x 2 x 2 x 2 x 2 = 32 soit 32 lignes dans le tableau. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 29 4 – Logigramme Chaque équation logique peut être représentée par un logigramme qui se compose de symboles logiques associés entre eux et décrivant le fonctionnement donné par l’équation. Tableau des différents symboles logiques Schéma à contact KA a b KA a b Table de vérité a 0 0 1 1 b 0 1 0 1 KA 0 0 0 1 a 0 0 1 1 b 0 1 0 1 KA 0 1 1 1 Equation Fonction Norme CEI (européenne) Norme Ansi (américaine) & KA = a.b ET (AND) a+b OU (OR) >=1 KA = 1 KA a a 0 1 KA 1 0 KA = PAS (NOT) a\ soit >=1 a b KA a 0 0 1 1 b 0 1 0 1 KA 1 0 0 0 a\ . b\ KA = NON OU (NOR) ou soit (a + b)\ KA = & KA a b KA a b a 0 0 1 1 b 0 1 0 1 KA 1 1 1 0 a 0 0 1 1 b 0 1 0 1 KA 0 1 1 0 KA = a\ + b\ NON ET (NAND) soit KA = KA = soit (a . b)\ (a.b\)+(a\.b) OU exclusif (XOR) soit KA = a =1 b Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 30 S1 & S2\ 1 S2 S1 . S2\ & (S1 . S2\) . (S3 + S4 + S5) M S3 >=1 S3 + S4 S4 >=1 S3 + S4 + S5 S5 Schéma logique du mélangeur M Exercice 3 : Donnez les tables de vérité pour le fonctionnement des électrovannes Y1 et Y2 du système étudié. S1 S2 S3 S4 S5 Y1 Y2 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 1 1 0 0 1 0 0 0 0 1 0 1 0 0 1 1 0 0 0 1 1 1 0 1 0 0 0 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 0 1 1 0 0 0 1 1 0 1 0 1 1 1 0 0 1 1 1 1 1 0 0 0 0 1 0 0 0 1 1 0 0 1 0 1 0 0 1 1 1 0 1 0 0 1 0 1 0 1 1 0 1 1 0 1 0 1 1 1 1 1 0 0 0 1 1 0 0 1 1 1 0 1 0 1 1 0 1 1 1 1 1 0 0 1 1 1 0 1 1 1 1 1 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 1 1 0 0 0 0 0 0 0 0 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 31 5 – Simplification des équations logiques Schémas Equations Simplifications observées KA S1 S2 0 KA = S1 . S2 . 0 KA = 0 KA = S1 . 1 KA = S1 KA = S1 . S1 KA = S1 KA = S1 . S1\ KA = 0 KA = S1 + 0 KA = S1 KA = S1 + S2 + 1 KA = 1 KA = S1 + S2 + S1 KA = S1 + S2 KA = S1 + S1\ KA = 1 KA S1 1 ET KA S1 S1 KA S1 S1 KA S1 0 KA S1 S2 1 OU KA S1 S2 S1 KA S1 S1 S1 S2 S1 S3 KA KA = (S1 . S2) + (S1 . S3) S2 KA S1 KA = S1 . (S2 + S3) Autre S3 S1 S1 S2 S3 S3 KA = (S1 + S2) . (S1 + S3) KA = S1 + (S2 . S3) S2 On peut « factoriser » une variable C’est le même fonctionnement : On peut regrouper une variable commune en dérivation. KA S1 S1 KA KA S1 C’est le même fonctionnement : S2 KA = S1 + (S1 . S2) KA = S1 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 32 6 – Lois de l’algèbre de Boole Négation 0=1 1=0 Propriété du produit 0.0=0 1.0=0 0.1=0 1.1=1 a.0=0 a.1=a a.a=a a. ā =0 0 est l’élément absorbant pour ET 1 est l’élément neutre pour ET a+0=a a+1=1 a+ ā =1 0 est l’élément neutre pour OU 1 est l’élément absorbant pour OU Propriétés de la somme 0+0=0 1+0=1 0+1=1 Commutativité a.b=b.a a+b=b+a Associativité a . (b . c) = (a . b) . c a + (b + c) = (a + b) + c Propriétés combinées du produit et de la somme a . (b + c) = a . b + a . c a + a . b = a (propriété d’absorption) Théorèmes de De Morgan S1 S2 S1\ S2\ S1 . S2 1 1 0 0 0 1 0 0 0 1 0 1 0 1 0 0 0 1 1 1 (S1 . S2)\ 1 1 1 0 Conclusion : (S1 S1 S2 S1\ S2\ S1 + S2 1 1 0 0 0 1 0 1 0 1 0 1 1 1 0 0 0 1 1 1 & Fonction NON ET ou NAND . S2)\ = S1\ + S2\ (S1 + S2)\ 1 0 0 0 Conclusion : (S1 S1\ + S2\ 1 1 1 0 S1\ . S2\ 1 0 0 0 >=1 Fonction NON OU ou NOR . S2)\ = S1\ + S2\ Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 33 Exercice 4 : En prenant exemple sur le schéma du mélangeur M, donnez les schémas logiques pour les deux électrovannes Y1 et Y2. S1 S2 Y1 S3 S4 S5 S1 S2 Y2 S3 S4 S5 Exercice 5 : Construisez les schémas à contact des équations ci dessous : KA1 = a . ( b + c ) KA2 = ( a\ + b ) . ( b\ + c ) KA3 = a . ( b + c\ ) . d KA4 = ( a . b\ ) + ( c + d ) KA3 KA1 A1 A2 A2 KA4 KA2 A1 A1 A2 A1 A2 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 34 Exercice 6 : Donnez l’équation puis le logigramme des schémas électriques ci-dessous : 1. S3 L1 S2 S1 L1 = …………………………………….. Logigramme : 2. L2 S2 S1 S4 S3 L2 = …………………………………….. Logigramme : 3. L3 S3 S1 S4 S2 S3 L3 = …………………………………….. Logigramme : Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 35 Exercice 7 : Donnez le schéma électrique et l’équation des logigrammes ci-dessous : 1. Logigramme a Schéma à contact 1 & KA1 b >=1 c Equation Logique : KA1 = 2. Logigramme a Schéma à contact >=1 & b KA2 >=1 c Equation Logique : KA2 = 3. Logigramme Schéma à contact & a >=1 b c 1 >=1 KA3 & d e 1 Equation Logique : KA3 = 4. Logigramme a Schéma à contact & >=1 b & >=1 c KA4 d Equation Logique : KA4 = Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 36 Exercice 8 : Donnez le logigramme et le schéma électrique des équations ci-dessous : 1. Equation Logique : KA1 = a . ( b\ + c ) . d Logigramme Schéma à contact 2. Equation Logique : KA2 = [ ( a\ + b ) . c ] + d Logigramme Schéma à contact 3. Equation Logique : KA3 = ( a . d ) + ( b\ . c ) Logigramme Schéma à contact 4. Equation Logique : KA4 = ( a\ + b ) . ( c + d\ ) Logigramme Schéma à contact Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 37 Leçon n°7 – Logique séquentielle - GRAFCET Nous allons utiliser à titre d’exemple un système de barrière. Spécification fonctionnelle: Fonctions : graphe fonctionnel L' appui sur un bouton « m » placé dans la loge provoque l'ouverture de la barrière qui une fois ouverte se referme automatiquement. Informations : compte rendu barrière ouverte. compte rendu barrière fermée. Sécurités : Aucune sécurité (sécurité du système lamentable !…). Spécification technologique: Entrées : Sorties : m = bouton poussoir h = contact fin de course électromécanique b = contact fin de course électromécanique On utilisera un moteur asynchrone triphasé pour actionner la barrière. Ce moteur sera couplé selon le sens de rotation par deux contacteurs "KM1" ( ouverture barrière ) et " KM2" ( fermeture barrière ) 1 – Niveaux de GRAFCET. Il existe trois niveaux de GRAFCET : Grafcet niveau 1 : point de vue système Grafcet niveau 2 : point de vue technologique Grafcet niveau 3 : grafcet de programmation 1-1) Grafcet du point de vue du système (ou grafcet de niveau 1) Il exploite les spécifications fonctionnelles et décrit le processus de la manière la plus simple sans tenir compte des spécifications technologiques. Il peut donc être lu et compris par n'importe qui ne connaissant pas le système. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 38 Exemple : barrière 0 Appui sur bouton ouverture OUVERTURE BARRIERE 1 Barrière ouverte 2 FERMETURE BARRIERE Barrière fermée 1-2) Grafcet du point de vue technologique (ou grafcet niveau 2) Il exploite les spécifications technologiques et comprend donc des indications techniques. Il s'adresse à des techniciens ou à du personnel averti connaissant bien le système. Exemple : barrière 0 m KM1 1 h KM2 2 b 1-3) Grafcet de programmation Il décrit le processus en utilisant l’adressage des entrées et sorties automates. Il est utilisé pour la programmation des automates industriels. Ce grafcet sera décrit dans la leçon « Programmation des automates ». 2 – SYMBOLES Un Grafcet se construit à l'aide de trois principaux éléments : Les étapes auxquelles sont associées les actions. Les transitions auxquelles sont associées les réceptivités. Les liaisons orientées. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 39 2-1) Les étapes Elles se représentent par un carré dans lequel figure le numéro de l'étape. Ce numéro est quelconque. KM1 1 il ne peut y avoir dans un même grafcet deux étapes portant un numéro identique. Cependant, L'action associée à l'étape se représente dans un rectangle ou carré relié à l'étape dont elle dépend. Si aucune action n'est associée à l'étape cela implique que toutes les sorties du système sont a 0 par défaut. Etape particulière : L'étape "initiale" se représente par un double carré. 0 C’est l'étape active (= 1 ) lors de la mise sous tension du système. Elle est unique pour un grafcet donné mais un problème pouvant se traiter à l'aide de plusieurs grafcets imbriqués, on peut avoir à gérer plusieurs étapes initiales. 2-2) Les transitions Les transitions marquent la possibilité au grafcet de basculer d'une étape à une autre si la condition de réceptivité qui leur est associée est satisfaite ( =1 ). 0 Elles se représentent par un trait reliant les deux étapes entre elles. En travers de ce trait, on trouve un autre petit trait marquant la réceptivité (combinaison m de variables d’entrée) associée à la transition. KM1 1 Une transition est toujours accompagnée d'une réceptivité (même si celle-ci est toujours vraie). 2-3) Les liaisons orientées Ce sont des traits portant des flèches, montrant le sens d'évolution du grafcet et permettant à celui-ci de se reboucler. 0 m KM1 1 h KM2 2 b Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 40 3 - Aiguillages et sauts d’étapes 3-1) Aiguillage en OU Un grafcet n'exécute pas forcément toujours la même série d'actions. Imaginons l'évolution suivante du problème de la barrière : Divergence en OU 0 On souhaite désormais que dans le cas d'une voiture sortant du site, le gardien n'ait pas à intervenir pour ouvrir la barrière et que cela se fasse automatiquement après passage du véhicule devant une cellule photoélectrique "c". m KM1 1 KM1 3 h h KM2 2 Dans ce cas, on souhaite que le système attende 10 secondes après ouverture complète avant de refermer la barrière. c Tempo=10 s. 4 b t KM2 5 b Convergence en OU On a alors recours à l'aiguillage en OU constitué de deux parties: divergence, endroit ou le grafcet se sépare en plusieurs branches. La convergence, endroit ou les branches se rejoignent. La Le nombre de branches d'un aiguillage en OU n'est pas limité. 3-2) Aiguillage en ET Imaginons désormais une autre évolution du grafcet de la barrière. Lorsque la gardien appuie sur le bouton pour ouvrir la barrière principale, il en ouvre une autre à l'entrée d'un parking annexe situé a 100m de la loge. Il est nécessaire que cette deuxième barrière soit munie d'une temporisation de l'ordre d'une minute car le véhicule trouverait la barrière fermée lorsqu'il l'atteindrait. On a recours cette fois-ci a l'aiguillage en ET constitué comme l'aiguillage en OU d'une divergence et d'une convergence. ème KM3 commande la montée de la 2 barrière ème KM4 commande la descente de la 2 barrière ème h2 est actionné lorsque la barrière 2 barrière est ouverte ème b2 est actionné lorsque la barrière 2 barrière est fermée L'étape 3 est une étape d'attente sans action. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 41 0 m 1 KM1 h h2 KM2 2 KM3 4 Tempo=1 mn 5 b t 3 6 KM4 b2 Comme pour l'aiguillage en OU, le nombre de branches d'un aiguillage en ET n'est pas limité. 3-3) Saut d’étape Le saut d'étape est une forme particulière de l'aiguillage en OU dans 0 une des branches est vide de toute action. laquelle Le système choisit donc d'effectuer ou de ne pas effectuer un certain nombre d'opérations. m KM1 1 d a KM2 2 ne pas le confondre avec la reprise de séquence. Un saut d'étape porte nécessairement une flèche pour b KM3 3 c 3-4) Reprise de séquence La reprise de séquence est identique au saut d'étape hormis qu'elle s'effectue dans le sens contraire. C'est à dire que la convergence est placée avant la divergence. 0 m KM1 1 choisit donc de refaire un certain nombre d'opérations. Le système a KM2 2 La reprise de séquence comporte nécessairement une flèche pour ne pas la confondre avec le saut d'étape. b d KM3 3 c Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 42 4 – Règles d’évolution du Grafcet 1ère règle. On doit préciser l'étape qui est active au début du cycle. C'est l'étape initiale. 2ème règle. Passer d'une étape à une autre, c'est franchir la Pour franchir la transition il faut : transition qui les sépare. a) qu'elle soit validée, c'est à dire que la ou les étapes qui la précèdent soient actives. b) que la condition de réceptivité associée à la transition soit vraie c'est à dire égale à 1. 3ème règle. Le franchissement d'une transition entraîne : a) b) L'activation de la ou des étapes qui la suivent. La désactivation de la ou des étapes précédentes. Nota : pour marquer l'activation d'une étape, on utilise couramment un petit point placé en dessous du numéro de l'étape. 3 KM1 3 La réceptivité est fausse b=0 4 L’étape 3 est active KM2 L’étape 4 est inactive KM1 La réceptivité est vraie b=1 4 L’étape 3 est inactive La transition est franchie KM2 L’étape 4 est active Commentaire sur les étapes d'attente: Dans l'aiguillage en ET on voit que si on applique la règle n°3, il sera nécessaire pour que KM2 ne soit plus alimenté que l'étape 2 et l'étape 6 soient actives et que la condition b1.b2 soit égale à 1. Or à partir du moment ou b1 est égal à 1, b2 ne l'est que 1mn plus tard ce qui oblige a continuer d'alimenter KM2 alors que cela n'est plus nécessaire. On a donc recours à l'étape d'attente qui permet de couper KM2 même si la condition b2 est égale à 0. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 43 Leçon n°8 – Eléments d’automatisme Pour automatiser un système, on intervient sur la partie commande. La partie opérative reste généralement inchangée, cependant il peut parfois être nécessaire de rajouter des capteurs qui informent la partie commande de l’état du système. L’enchaînement des actions peut être commandé à l’aide : de relais d’automates (A.P.I.) NB : Cette leçon traite des relais et des capteurs, les API seront développés dans la leçon n°5 . 1 – Relais auxiliaires Le relais auxiliaire est un appareil qui utilise les lois de l’électromagnétisme pour fonctionner, comme le sauf qu’il n’a pas pour mission d’établir et d’interrompre des courants de puissance. contacteur, Il permet à partir d’une information électrique, d’actionner des contacts qui peuvent modifier, amplifier ou multiplier l’information. On le trouve dans les circuits de commande des systèmes automatisés. 1-1) Principe Un ou plusieurs contacts reliés à un circuit magnétique mobile commutent sous l’effet de l’attraction magnétique. Quand un courant électrique parcourt la bobine ( attractif. Le circuit magnétique mobile ( 3 1 ) un champ magnétique rend le circuit magnétique fixe ( ) est attiré et il entraîne avec lui la partie mobile des contacts ( que la bobine n’est plus alimentée, le ressort de rappel ( 5 4 2 ). Dès ) ramène le circuit magnétique mobile à sa position A1 13 21 14 22 1 A2 d’origine ainsi que les contacts qui y sont rattachés. 3 21 13 KA1 22 14 4 5 2 D’après Schneider D’après Schneider Principe Symbole ) Exemple Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 44 1-2) Contacts Dans les relais auxiliaires on peut trouver 3 types de contacts : Les contacts à fermeture (F) : ils se ferment. Ils sont également appelés NO (Normalement Ouvert) Leurs bornes sont repérées par des nombres qui se terminent par 3 et 4 Exemple : 13 - 14 Lorsque la bobine qui leur est associée est alimentée, Les contacts à 13 14 21 22 ouverture (O) : ils s’ouvrent. Ils sont également appelés NF (Normalement Fermés) Leurs bornes sont repérées par des nombres qui se terminent par 1 et 2 Exemple : 21 - 22 Lorsque la bobine qui leur est associée est alimentée, Les contacts à ouverture fermeture (OF) ou inverseurs : Lorsque la bobine qui leur est associée est alimentée, un circuit s’ouvre et un autre se ferme. Leurs bornes sont repérées par des nombres qui se terminent par 1 pour le commun, par 2 pour le contact à ouverture et par 4 pour le contact à fermeture. Exemple : Contact NO : 41 – 42 ou contact NF : 41 – 44 44 41 42 1-3) Type de relais Les relais auxiliaires (également appelés contacteurs auxiliaires) à contacts instantanés n’assurent pas forcément toute les fonctions demandées par un automatisme. C’est pourquoi il en existe d’autres types : a) Les relais temporisés (Cf. leçon n° 5 de la 1ère période) Il existe deux types de temporisation : La temporisation au travail : Les contacts changent de position un certain temps après la mise sous tension de la bobine. La temporisation au repos : Les contacts changent de position dès la mise sous tension de la bobine et reviennent à leur position d’origine un certain temps après la mise hors tension de la bobine. Temporisation au travail Temporisation au repos Corrigez le symbole D’après Schneider Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 45 b) Les relais bistables Ce relais est équipé de deux bobines. actionne les contacts lorsqu’elle est alimentée, l’autre les ramène à leur position d’origine. Une des bobines Un dispositif de verrouillage mécanique maintient les contacts dans la dernière position demandée. D’après Schneider c) Relais à contacts de passage Les contacts de ce relais vont s’actionner pendant un temps très court (exemple : 200 ms). Il existe deux types de relais à contact de passage : Ils permettent d’avoir une impulsion soit à l’enclenchement, soit au déclenchement. D’après Schneider d) Relais clignoteurs Lorsque la bobine est alimentée, les contacts s’enclenchent et se déclenchent de manière continue et régulière. Les périodes de clignotement sont en général réglables et symétriques. D’après Schneider e) Relais de sécurité évolués sont utilisés dans les circuits de surveillance et de sécurité des systèmes. Ces relais Sur ce type de relais, toutes les fonctions sont doublées pour éviter qu’une défaillance puisse empêcher la mise en sécurité du système. D’après Schneider Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 46 Exercice 1 : Au repos, le voyant H1 est éteint et le voyant H2 est allumé. L’action sur le bouton poussoir S1 provoque la mise sous tension du voyant H1 et l’extinction du voyant H2. Complétez le schéma de principe en utilisant un relais. S1 H1 H2 Quel type de relais choisissez vous ? (Donnez la référence) Réponse : Quel type de contact choisissez-vous ? (Faites apparaître les bornes sur le schéma) Réponse : Exercice 2 : L’action sur le bouton poussoir S1 provoque l’allumage du voyant H1 et l’extinction du voyant H2. L’action sur le bouton poussoir S2 provoque l’allumage du voyant H2 et l’extinction du voyant H1. Les actions sont mémorisées. Complétez le schéma de principe en utilisant un relais. S1 S2 H1 H2 Quel type de relais choisissez vous ? (Donnez la référence) Réponse : Quel type de contacts choisissez-vous ? (Faites apparaître les bornes sur le schéma) Réponse : Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 47 2 – Détecteurs la partie commande doit être renseignée sur l’état de la partie opérative. Pour assurer sa fonction, Le détecteur est le moyen technologique qui permet d’acquérir l’état du système dans lequel il est installé. Pressostat Capteur de position D’après Schneider D’après Schneider 2-1) Principe Le détecteur détecte la grandeur d’entrée à l’aide d’un élément sensible. Celui-ci convertit l’information d’entrée en une grandeur de sortie, directement traitable par la partie commande. Grandeur d’entrée Grandeur de sortie Capteur Partie opérative Partie commande Exemples de grandeur d’entrée Exemples de grandeurs de sortie Présence Température Tension Vitesse Pneumatique Hydraulique Electrique : o o o Etc. o o Tension Intensité Résistance Capacité Etc. Etc. Les détecteurs doivent fonctionner de façon fiable en demandant peu ou pas de maintenance. Ils sont classés suivant le signal de sortie en trois types : Détecteur Tout Ou Rien (TOR) Détecteur analogique Détecteur numérique La sortie peut prendre deux états par rapport à une consigne : vrai ou faux. La sortie peut prendre toutes les valeurs entre une valeur mini et une valeur maxi. La sortie évolue par échelon ou sous forme de mots binaires. Dans la suite de cette leçon, nous étudierons uniquement les détecteurs Tout Ou Rien. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 48 2-2) Détecteurs de présence : généralités Le problème de la détection de présence d'un objet, pour simple qu'il puisse paraître au premier abord, est en fait assez complexe et varie en fonction de : sa technologie sa taille, sa masse, sa forme la proximité du détecteur avec l’objet à détecter la vitesse de déplacement de l’objet à détecter la fréquence de passage des objets à détecter En effet, on ne détectera pas de la même façon une pièce de carrosserie de voiture, un pot de yaourt ou une feuille de papier. On doit de plus disposer de matériels répondant aux influences externes et notamment garantissant un IP minimum selon les cas. Pour répondre à tous les cas de figures possibles, les constructeurs d'appareils de détection ont été conduits à développer une large gamme de détecteurs de présence et tout le problème du technicien sera de s'y retrouver au milieu de cette multitude de références. Les différentes technologies sont : Les détecteurs de position électromécaniques Les détecteurs de proximité inductifs Les détecteurs de proximité capacitifs Les détecteurs photoélectriques 2-3) Détecteurs de position électromécanique Principe L’objet à détecter vient en contact direct avec le détecteur. Le contact physique entraîne la fermeture (ou l’ouverture) d’un contact. Ce genre de détecteur est très utilisé dans les systèmes automatisés. Avantages Sécurité de fonctionnement élevée Séparation galvanique des circuits. Grande endurance électrique Mise en oeuvre simple, fonctionnement visualisé Bonne aptitude à commuter des courants faibles. Tension d'emploi élevée. Grandes résistance aux ambiances industrielles difficiles. D’après Schneider Domaines d'utilisation Machines outils (usinage, manutention, levage) Agro-alimentaire (conditionnement, emballage). Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 49 Constitution Les interrupteurs de position sont constitués à partir de trois éléments de base : le corps équipé de contacts électriques la tête le dispositif d'attaque. Les constructeurs proposent des appareils complets ou composables. choix de la tête de commande et du dispositif d'attaque De nombreux modèles peuvent être associés. Pour effectuer choix du type de dispositif d'attaque, on utilise le tableau de choix ci-dessous. Caractéristique de l'application Présence de l'objet en butée mécanique Tête de commande et dispositif d'attaque conseillés rectiligne à poussoir Came à 30° Guidage précis < 1mm Trajectoire linéaire rectiligne à levier à galet ou à poussoir à galet Came à 30° Guidage peu précis, env. 5mm. Angulaire à levier à galet Cible à face plane ou cylindrique trajectoire linéaire ou angulaire guidage imprécis, env. 10mm angulaire à tige Cible de forme quelconque Trajectoire multidirectionnelle Guidage > 10 mm multidirectionnel Choix du corps Métallique (IP65/66/67) ou plastique (IP65). Choix des contacts Ceux-ci peuvent être de deux types : Contacts à action brusque La vitesse de déplacement des contacts mobiles est indépendante de la vitesse de l'organe de commande. Cette particularité évite la formation d'arcs électrique au niveau des contacts même en cas de vitesse de déplacement de la pièce à contrôler faible. Contacts à action dépendante La vitesse de déplacement des contacts est dépendante de la vitesse de déplacement de l'organe de commande. Celle ci ne doit en aucun cas être inférieure à 0,001 m/s pour éviter la formation d'arcs électriques au niveau des contacts. Durabilité électrique des éléments de contacts Elle s'exprime en millions de cycles de manœuvres et elle dépend du type de contacts (action brusque ou dépendante) et du courant commuté. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 50 2-4) Détecteurs de proximité inductifs Principe détecte sans contact physique la présence de tout objet en matériau conducteur Un détecteur de proximité inductif Le détecteur de proximité inductif comporte au niveau de sa face sensible un oscillateur. Cet oscillateur crée en avant de la face sensible un champ électromagnétique alternatif ayant une fréquence de 100 à 600 kHz selon le modèle. D’après Schneider ferrites bobines oscillateur . Lorsqu'un objet conducteur est placé dans ce champ, il est le siège de courants induits circulaires qui se développent à sa périphérie (effet de peau du à la fréquence). Ces courants constituent une surcharge pour le système oscillateur et entraînent de ce fait une réduction de l'amplitude des oscillations inversement proportionnelle à la distance objet/détecteur. La détection est effective lorsque la réduction de l'amplitude des oscillations est suffisante pour provoquer un changement d'état du détecteur. Avantages Produit statique Pas d'usure puisque pas de contact avec l'objet à détecter Réponse rapide autorisant des cadences de fonctionnement élevées Produit autorisant le fonctionnement en ambiance agressive Visualisation de l'état de sortie Inconvénient principal : Détection des objets métalliques uniquement. (à encadrer en rouge !!) Domaines d'utilisation Machine-outil (usinage, manutention) Robotique (assemblage) Agro alimentaire (convoyage) Contacts de sortie / Représentation symbolique Le ou les transistors de sortie sont modélisés par un simple un contact électrique. Trois possibilités sont proposées par les constructeurs d'appareils. -B1 -B3 -B2 1 contact NO 1 contact NC 1 contact inverseur Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 51 2-5) Détecteurs de proximité capacitifs Principe Le détecteur capacitif se compose principalement d'un oscillateur dont les condensateurs constituent la face sensible. Lorsqu'un matériau conducteur ou isolant de permittivité > 1 est placé dans le champ électrostatique, il modifie les capacités de couplage et provoque des oscillations. objet à détecter Oscillateur . réglage sensibilité Permittivité : propriété d'un diélectrique d'affaiblir les forces électrostatiques. Après mise en forme, un signal de sortie correspondant à un contact NO ou NC est délivré Avantages Ce sont les mêmes que pour les détecteurs inductifs. ils peuvent aussi détecter à courte distance la présence de tous types d'objets. Cependant, Domaines d'utilisation L'agro alimentaire, chimie, transformation des matières plastiques, le bois, les matériaux de construction, etc. 2-6) Raccordement des détecteurs de proximité Technologie 2 fils Les appareils de cette catégorie se raccordent simplement en I résiduel série avec la charge. En raison de la technologie à base de semi-conducteurs (transistors), on constate à la fermeture du contact une petite chute de tension aux bornes du détecteur. C'est la tension de déchet. De la même façon, lorsque le contact s'ouvre, il y a quand même un petit courant qui circule. C'est le courant résiduel. -B1 -B2 Charge U déchet Charge Technologie 3 fils +24V Les appareils de cette catégorie sont alimentés en courant continu. Ils l'alimentation transmission du signal de sortie. nécessitent deux fils pour et un fil pour la Ces appareils n'ont pas de courant résiduel et leur tension de déchet est négligeable. -B1 Charge 0V Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 52 2-7) Détecteurs photoélectriques Présentation de toutes formes et de matériaux de toutes natures, la détection à très grande distance, etc. C'est la technologie présentant le maximum de possibilités d'applications car elle autorise la détection d'objets En conséquence les domaines d'application sont très nombreux, que ce soit dans l'industrie comme dans le bâtiment. Principe de fonctionnement Une diode électroluminescente émet un rayon lumineux en lumière visible ou invisible (infrarouge). Ce rayon lumineux est ensuite reçu par un phototransistor, puis amplifié pour commander un relais. Etage emetteur Etage récepteur Alim. sortie Critères de choix caractéristique de l'application critères différentiateurs Objet opaque et/ ou surface brillante Fidélité de commutation Grande portée <100 m Ambiance polluée Dimensions de l'objet réduite Espace de montage suffisant Objet opaque et surface non réfléchissante Fidélité de commutation <10 mm Détection directe Portée moyenne <15m d'objets (boîtes, Objet volumineux flacons, palettes, etc..) Ambiance propre Détection liée à la manutention (chariots, Surface de l'objet brillante sacs, produits en vrac,...) Objet à surface claire Détection de Distance de détection courte personnes, de (qq. cm) véhicules, d'animaux. Ambiance propre L'objet peut être transparent La couleur de l'objet peut être variable Présence d'un arrière plan Détection directe de pièces machine ou d'objets. Objet très petit Espace disponible faible Fidélité de commutation élevée (<mm) Ambiance propre technologies conseillées E R Système barrage E/R Système reflex E/R Système reflex polarise E/R Système de proximité E/R Système de proximité avec effacement de l'arrière-plan E/R Système à fibres optiques Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 53 2-8) Choix d’un détecteur de présence Comme pour la plupart des appareils électriques, installer un détecteur de présence sur une machine constitue une démarche de choix. Ce choix doit être pertinent sous peine de dysfonctionnement ou de défaillance du détecteur luimême. Détermination du type de détecteur selon la pièce et les conditions de détection (selon Schneider) OBJET A DETECTER L'objet est-il Solide ? Non Oui Le contact détecteur/objet est-il possible ? Non Oui l'objet a-t-il une masse > 500g Non Non Oui La fréquence de passage de l'objet est-elle < 1Hz Non La distance objet/détecteur est-elle >15 mm Oui Oui La vitesse de passage de l'objet est-elle < 1,5ms L'objet est-il métallique ? La distance objet/détecteur est-elle <48 mm Non Oui Non Oui Non Oui Interrupteurs de position électromécaniques L'espace de montage du détecteur est-il important ? Non Oui Détecteur de proximité inductifs Détecteurs photoélectriques Détecteurs de proximité capacitifs Détermination de la référence précise du détecteur Paramètres techniques : Environnement : température de fonctionnement, Indice de protection Source d'alimentation : tension alternative ou continue Signal de sortie : électromécanique ou statique Type de raccordement : câble, bornier, connecteur Paramètres fonctionnels : Dispositif d'attaque, détecteur noyé ou non, système barrage ou reflex, etc. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 54 Exercice 1 : Dans une laiterie (atmosphère humide), vous devez détecter le passage de packs de lait (un emballage carton -1 de 6 litres toutes les 0,8 s) sur un tapis roulant (vitesse du tapis : 1 m.s ). Le contact est possible avec le produit et la distance minimale de détection est de 50 mm. L’alimentation disponible est continue est le mode de raccordement souhaité en câble. La sortie sera un contact NO. Donnez les caractéristiques du détecteur à utiliser. Famille : Type : Référence : IP minimum : Alimentation : Signal de sortie : Raccordement : Masse de l’objet : Fréquence de passage (Hz) : Exercice 2 : Quelle famille de détecteur choisirez vous pour détecter ? La position d’un wagonnet (arrêté) : Le passage d’une personne : Une pression pneumatique : La couleur d’un objet : La dépression dans une cuve : La présence d’une pièce de monnaie : Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 55 Leçon n°9 – Composants pneumatiques 1 – Installations pneumatiques Nous avons vu précédemment que les mouvements de rotation nécessaires au fonctionnement d’un système étaient le plus souvent générés par des moteurs électriques. Les mouvements linéaires, quant à eux, sont généralement fournis par des vérins. Un vérin crée un mouvement linéaire à partir d’une technologie pneumatique (ou hydraulique). L’énergie pneumatique utilise l’énergie potentielle de l’air sous pression. Le vérin est un actionneur qui transforme de l'énergie sous forme pneumatique (Pression) en énergie mécanique (Force). Air comprimé VERIN Pression P Force F en Bars en Newtons Energie pneumatique Energie Effort disponible mécanique 1-1) Avantages de la technologie pneumatique La technologie pneumatique possède de nombreux avantages parmi lesquels : La simplicité de fonctionnement La fiabilité L’obtention d’une force conséquente La possibilité d’être installée dans tous les environnements (même explosifs, car il n’y a pas de risque d’étincelles) 1-2) Inconvénients de la technologie pneumatique Par rapport à l’électricité, on peut citer les inconvénients suivants : Le bruit produit par l’échappement Le coût L’encombrement de l’unité d’air de production et de stockage de l’air comprimé Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 56 2 – Système à vérin simple effet 2-1) Parties constituant un vérin simple effet Embout arrière 1 Piston Piston Orifice d'arrivée d'air Orifice Orifice d'évent d’évent 2 Cylindre Ressort dede rappel Ressort rappel 4 Orifice d’arrivée d’air 5 Embout avant Tige de de piston Tige piston 3 2-2) Caractéristiques principales Diamètre du piston Course maximale de la tige du piston Pression maximale d'alimentation 2-3) Fonctionnement et repérage des mouvements du piston On désigne le vérin par C1 RC1 SC1 Echappement Air comprimé SC1 : Sortie de la tige L'alimentation de la chambre provoque la sortie de la tige de piston RC1 : Rentrée de la tige La mise à l'échappement de la chambre provoque la rentrée de la tige de piston Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 57 3 – Commande par distributeur 2/2. Examinons le câblage d'un vérin simple effet alimenté par un distributeur du type 2/2 : Cela signifie que c’est un distributeur avec 2 orifices et 2 positions. 1 1 V1 2 2 3 3 Tiroir permettant le blocage ou la circulation de l’air entre les orifices 1 et 2 4 Ressort de rappel du tiroir e 1 2 4 Réseau air comprimé Commande du tiroir (manuelle) Corps ( 2 orifices) Lorsque V1 est appuyé, l’air passe par les orifices 1 et 2 vers le vérin. La tige du vérin sort. L’orifice « e » permet à l’air de s’échapper librement. Lorsque V1 n’est plus appuyé, l’alimentation d’air comprimé est coupée car le passage entre les orifices 1 et 2 est bouché. Cependant, la tige du vérin ne rentre pas. Pour obtenir le retour de la tige du vérin, il faut mettre le vérin à l’échappement. Conclusion : Ce type de distributeur (appelé bloqueur) ne convient pas pour alimenter le vérin, car la mise à l'échappement (délestage) de la chambre du vérin ne peut pas s'effectuer. Remède : V1 e V1 permet l'alimentation 1 V2 permet d'assurer le 2 du vérin délestage du vérin V2 Critique de la solution: 1 2 Il faut deux distributeurs pour alimenter un vérin. On préfère généralement utiliser un distributeur 3/2. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 58 4 – Commande par distributeur 3/2. Appui sur V1 Relâchement de V1 e e SC1 2 2 Appui V1 3 V1 1 L'appui sur le poussoir V1 permet le passage de l'air de l'orifice 1 vers l'orifice 2. 3 1 Au relâchement de V1, l'air comprimé par le retour du piston lors de la détente du ressort peut s'échapper par les orifices 2 et 3 du distributeur. Le vérin est donc alimenté et la tige du vérin sort. La tige du vérin rentre. Le ressort se comprime et l'air s'échappe par l'orifice "e" du vérin. Lorsque la puissance mise en jeu par le vérin est importante, le distributeur, de taille conséquente, est lui-même alimenté par un capteur qui envoie une information soit électrique, soit pneumatique. On dit que le distributeur est un préactionneur. Le circuit du capteur au distributeur constitue le circuit de commande. Le circuit du distributeur au vérin constitue le circuit de puissance. Schéma de principe fonctionnel V1: Capteur V1 M1 à commande manuelle 3 3 3/2 à commande pneumatique et rappel par ressort M1 : Distributeur 2 3 bars C1 1 2 7 bars 1 e C1 : Vérin à simple effet. Schéma de câblage normalisé. V1 M1 Les conduits du circuit de commande (basse pression à 3 bars) du pilote sont représentés par un trait interrompu court. Les autres conduits (haute pression à 7 bars) sont représentés par un trait fort continu. 3 3 3 bars 1 C1 2 7 bars 1 e Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 59 5 – Vérin double effet 5-1) Parties constituant un vérin double effet Le vérin à double effet ne possède pas de ressort de rappel mais il est muni de Embout arrière Piston Cylindre deux orifices. Embout avant Tige de piston Orifice d'arrivée d'air 5-2) Conventions On appelle C1 le C+ vérin. On désigne par C- la chambre du vérin coté (tige rentrante ou tige rentrée). On appelle C+ l'autre CSC1 tige de piston chambre. C+ C- sortie de la tige de piston On note RC1 le mouvement de rentrée de la tige du piston. RC1 On note SC1 le mouvement de 5-3) Fonctionnement C+ et permettre l'échappement de l'air contenu dans la chambre C-. Mouvement RC1 : Il faut alimenter la chambre C- et permettre l'échappement de l'air contenu dans la chambre C+. Mouvement SC1 : Il faut alimenter la chambre 5-4) Alimentation avec deux capteurs 3/2 C+ L'appui sur V1 permet l'alimentation de C+, et C- est à l'échappement. La tige du vérin sort. C2 L'appui sur V2 permet l'alimentation de C-, V1 et C+ est à l'échappement. La tige du vérin rentre. 2 V2 3 1 3 1 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 60 5-5) Alimentation avec un distributeur 5/2 C+ Au repos, l'air circule de l'orifice 1 vers l'orifice 2 et alimente la chambre C-. La chambre C+, elle, est mise à l'échappement par l'orifice 4 et l'orifice 5. C- Le vérin a sa tige rentrée. 4 Une action sur la commande du distributeur déplace le tiroir et alimente la chambre C+ du vérin par l'orifice 1 et l'orifice 4. La chambre C- est mise à l'échappement par l'orifice 2 et l'orifice 3. La tige du vérin sort. 5 2 3 1 Nota : si l'action sur la commande du distributeur n'est pas maintenue, son ressort de rappel le renvoie à la situation de repos. Le système est monostable. Il existe des distributeurs nécessitant une nouvelle action sur une deuxième commande pour faire changer d'état au distributeur. Ce sont des distributeurs bistables. 5-6) Alimentation avec un distributeur 5/2 à double pilotage C- C+ Pilote 14 Pilote 12 4 2 2 2 V2 V1 3 1 1 5 1 3 3 Le déplacement du tiroir du distributeur est assuré par les pilotes pneumatiques 12 et 14, commandés eux-mêmes par les capteurs V1 et V2. Complétez le texte suivant. On vous demande de préciser les chambres (C+ ou C-) et les orifices (1,2,3,4 et 5) concernés. Action de V1 :Le pilote 14 est sous pression. Le tiroir se déplace et permet le passage de l'air de l'orifice ( 1 ) vers l'orifice ( 4 ) . La chambre ( C+ ) est alimentée. La tige du vérin sort, chassant l'air contenu dans la chambre ( C- ) par les orifices ( 2 ) et ( 3 ) du distributeur. Le fait de relâcher l'action sur V1 provoque la mise à l'échappement du pilote 14 mais ne change pas la position du tiroir (le signal est mémorisé). On dit que le distributeur est bistable. Action de V2 : Le pilote 12 est sous pression. Le tiroir se déplace et permet le passage de l'air de l'orifice ( 1 ) vers l'orifice ( 2 ). La chambre ( C- ) est alimentée. La tige du vérin rentre, chassant l'air contenu dans la chambre ( C+ ) par les orifices ( 4 ) et ( 5 ) du distributeur. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 61 6 – Symboles pour les schémas de pneumatique 6-1) Actionneurs e e Vérin simple effet à Vérin simple effet à compression traction Vérin double effet Moteur pneumatique 1 sens de rotation Moteur pneumatique 2 sens de rotation Vérin rotatif 360° 6-2) Capteurs et distributeurs 2 2 1 3 2/2 NF 1 3/2 NO 1 3 2/2 NO 4 1 3 4/2 2 2 2 2 1 3/2 NF 4 5 1 3 5/2 6-3) Dispositifs de commande boutonpoussoir électrique pneumatique ressort de rappel 6-4) Divers échappement arrivée d'air liaison HP liaison BP (haute pression) (basse pression) Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 62 7 – Production et traitement de l’air comprimé 7-1) Production de l’air comprimé un compresseur qui aspire l’air à la pression atmosphérique et le comprime. Pour produire de l’air comprimé on utilise L’accumulateur ou réservoir tampon stocke l’air comprimé issu du compresseur. L’accumulateur doit être vérifié périodiquement par le service des mines. De plus il doit comporter des sécurités. 6 bars. Rappel : la pression atmosphérique est d’environ 1 bar. La pression d’utilisation de l’air comprimé est d’environ 11 12 10 Vers utilisation 5 6 8 7 3 Point le plus bas du circuit 4 9 M 1 2 Légende : 1 2 3 4 5 6 Moteur électrique d’entraînement Compresseur Réservoir Purge automatique Soupape de sécurité Vanne 7 8 9 10 11 12 Filtre Lubrificateur Vanne de purge manuelle Unité de conditionnement Régulateur de pression variable Manomètre Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 63 7-2) Traitement de l’air comprimé 10 1: Arrivée d’air 2 : Vanne 9 2 8 3 7 6 4 1 5 générale 3 : Régulateur de pression (détendeur) 4 : Manomètre 5 : Filtre 6 : Lubrificateur 7 : Electrovanne générale (distributeur 3/2) 8 : Dispositif de mise en pression progressive 9 : Pressostat 10 : Sortie d’air Le robinet d’isolement (ou vanne générale) Il permet d’isoler l’installation qui se trouve en aval. Il peut être consignable avec un cadenas. Vanne Vanne réglable Le Régulateur La demande en air comprimé influe sur la pression de l’air ainsi qu’à l’arrêt et à la mise en marche du compresseur. Pour obtenir une pression constante on utilise un régulateur. Maintenance : Il faut fréquemment manœuvrer le régulateur. Régulateur de pression Régulateur avec soupape Le filtre L’air comprimé qui provient du réseau est chargé d’impuretés (poussières, dépôts de rouille dans les tuyaux). Il faut donc filtrer ces particules pour éviter un effet néfaste sur les appareils (vérins, distributeurs, etc.). Maintenance : Il faut fréquemment vider la cuve et nettoyer le filtre. Filtre à purge manuelle Filtre à purge automatique Filtre à élément magnétique Filtre à indicateur de pollution Le lubrificateur L’utilisation de certains éléments, tels que les moteurs pneumatiques, nécessitent une lubrification de l’air. On utilise alors des lubrificateurs qui chargent l’air de particules d’huiles. Maintenance : Il faut quotidiennement régler le débit de l’huile et compléter son niveau. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 64 Les Clapets anti-retour Ils permettent de laisser passer l’air dans un seul sens. Clapet anti-retour réglable Clapet anti-retour Clapet anti-retour piloté Les limiteurs de débit réglables Ils permettent de régler la vitesse de rentrée ou de sortie d’un actionneur. Réducteur de débit Réducteur de débit variable Réducteur de débit unidirectionnel Autres composants d’un circuit pneumatique Symbole Nom Rôle l’humidité contenue dans l’air. Déshydrateur Enlève Thermomètre Indique la température de l’air comprimé Manomètre Indique la pression de l’air comprimé Débitmètre Indique un débit d’air par unité de temps Unité de Filtre, lubrifie et indique la pression conditionnement Silencieux nuisances sonores des échappements Limite les Remarque : Pour les circuits hydrauliques, les symboles sont identiques à ceux des circuits pneumatiques mais avec des flèches pleines. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 65 Leçon n°10 – Automates Programmables Industriels (A.P.I) 1 – Intérêt et principe des Automates Programmables L’évolution régulière des systèmes de production industrielle est la conséquence directe du développement de l’automatisation. Pour fonctionner automatiquement, les moyens de production peuvent faire appel à deux technologies : câblée La logique programmée La logique La logique câblée utilise différents types de relais (instantané, temporisé, bistables, etc.) La logique programmée permet de limiter les inconvénients de la logique câblée. 1-1) Avantages de la logique programmée En utilisant un API, il y a moins de conducteurs et de connexions donc : Coût de câblage moins important Moins de risques de pannes électriques Moins d’entretiens préventifs Coût général de maintenance diminué Et aussi : Le changement de fonctionnement se traduit uniquement par Alors Câblus, t’en es où ? Moi j’ai presque fini ! Plus que quelques minutes pour le raccordement… Automate Zelio Schneider une modification du programme Plus que 3 mois de câblage Programmus ! Encore 3000 fils et c’est fini… Automate M340 Schneider Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 66 1-2) Principe de la logique programmée & a b & Des fonctions logiques de calcul existent à l’intérieur d’une unité arithmétique et logique (ALU). >=1 & Elles sont sollicitées à partir d’un programme qui « ouvre » et « ferme » des portes ET en fonction des informations 0, 1 qu’il renferme. P2 1 0 0 P1 0 1 0 Entrées P0 0 0 1 Sortie a b S 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 0 0 0 1 0 1 1 1 0 1 1 0 S =1 & A partir de l’exemple de l’unité logique représenté ci-dessus, remplissez le tableau suivant : Mot de programmation >=1 0 P2 P1 P0 Nom de la Fonction ET En résumé : En changeant le mot du programme (P2, P1, P0) on modifie la fonction effectuée pour les entrées a et b. OU OU exclusif 1-3) Rôle de l’A.P.I dans le système automatisé. L’API fait partie des organes de commande : c’est le « cerveau » du système. Actionneur Partie opérative 2 Préactionneur Partie commande 1 Processus 3 Capteur 4 Automate Programmable Industriel Pupitre de commande 5 Placez les mots suivants dans les cases : Processus, actionneur, capteur, Préactionneur, pupitre de commande. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 67 2 – Structure d’un Automate Programmable Vers capteurs, organes de commandes Unité centrale & Mémoire Module d’extension Alimentation électrique Interface d’entrée Interface de sortie Vers préactionneurs Terminal de programmation (Schneider) 2-1) Alimentation électrique D’après Schneider Elle transforme la tension du réseau en différentes tensions nécessaires au fonctionnement de l’automate. Ce sont généralement des tensions continues : (5 V, 12 V, 15 V, …) 2-2) Unité centrale Le microprocesseur est la partie maîtresse. C’est lui qui gère les différents composants de l’automate. Il lit en permanence le programme stocké dans sa mémoire et en fonction des informations reçues par l’intermédiaire de l’interface d’entrée, il commande l’interface de sortie. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 68 2-3) Interfaces d’entrée et de sortie Les interfaces permettent d’adapter les gérables par l’unité centrale de l’automate. signaux électriques du système automatisé pour qu’ils soient Les interfaces d’entrée et de sortie peuvent être intégrées dans l’automate ou sous formes de insérer dans des cartes que l’on peut racks. Définition : on appelle rack (tiroir), la base de l’automate sur laquelle on peut ajouter les éléments que l’on souhaite. Zelio (Schneider) API avec interfaces intégrées TSX Micro (Schneider) Carte pour TSX Micro (Schneider) API avec cartes d’interface Carte d’interface (entrée TOR) Carte d’interface avec bornier déporté a) Interface d’entrée Elle assure la transformation et l’adaptation des signaux électriques provenant des différentes entrées de l’automate : - capteurs - boutons poussoirs - commutateurs - etc. Les signaux d’entrée peuvent être de type : - Tout ou rien : Bouton poussoir, capteur de présence, etc. - Analogique : Capteur de température, etc. - Numérique : Lecture de codes barres, codeur de position, etc. b) Interface de sortie Elle assure la transformation des signaux logiques fournis par l’unité centrale en signaux pouvant commander des préactionneurs : - contacteurs - distributeurs pneumatiques - voyants de signalisation - etc. Les sorties automates peuvent être de différentes technologies : - électromagnétique : relais - statique : transistors ou triacs Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 69 3 – Raccordement d’un API Pour une application simple, le schéma de raccordement de l’automate peut tenir sur un seul folio. Exemple : Raccordement d’un automate Zelio (Schneider) Nombre d’entrées : 6 Nombre de sorties : 4 Tension d’alimentation : 100-240V Tension des entrées : 100-240 50-60 Hz V 50-60 Hz Tension des sorties : 12-240 V 50-60 Hz Ou 12-125 V continu Le raccordement des entrées et sorties automates peuvent se faire sur des borniers déportés : Exemple : Bornier Téléfast pour automates TSX Micro. Liaison avec cordon HE10 (Schneider) Lorsque l’application nécessite un nombre d’entrées et de sorties important, il est préférable d’utiliser un folio pour la représentation des entrées automates et un folio pour la représentation des sorties. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 70 4 5 6 7 8 9 10 11 12 13 14 I.10 I.11 nom du fichier 3 FOLIO: 1/2 A B Détecteur 2 fils S5 BN BK BU BU PNP D E F G 0V H 24 V I.0 I.1 I.2 I.3 I.4 I.5 I.6 I.7 I.8 I.9 24 V = I ENTREES API : TSX Micro 12 E TOR BN S4 S8 S3 S2 S0 C S1 Détecteur 3 fils L.P. Gaston Bachelard 0,25 A TSX Micro J L'APPLICATION: 2 NOM DE 1 dimanche 29 février 2004 0 VisioDocument 3-1) Raccordement des entrées (exemple : TSX Micro avec 12 Entrées TOR) Détecteur DC type 3 fils : tension d’alimentation 24 VCC – sortie PNP Détecteur DC type 2 fils : tension d’alimentation 24 VCC polarisés ou non 3-2) Raccordement des sorties (exemple : TSX Micro avec 8 Sorties TOR) 3 4 5 6 7 8 9 10 11 12 13 3 C4-7 4 5 6 7 TSX Micro FOLIO: 1/2 A B 230 V – 50 Hz L N C0 0 C1-3 1 2 E KA1 + 24 VCC KA1 G MARCHE F H H1 230 V H2 24 V H3 24 V NOM DE I KM2 230 V ATU KM1 230 V J 0V Sortie de sécurité ( Chien de Garde) L.P. Gaston Bachelard KA1 L'APPLICATION: D Alimentation lundi 1 mars 2004 C 14 nom du fichier 2 VisioDocument 1 SORTIES API : TSX Micro 8 S TOR 0 Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 71 3-3) Arrêt d’urgence Normalement, l’automate ne doit pas gérer les arrêts d’urgence : Ceux-ci doivent être traités en logique câblée ! Néanmoins, l’automate doit être programme. averti de l’arrêt d’urgence afin d’informer le Il existe des relais spécialisés pour le traitement des arrêts d’urgence (type Préventa, etc.) Ces relais permettent de réaliser des boucles de sécurité du type de celle représentée en page précédente sur le folio des sorties automates. Relais Préventa Schneider 4 – Choix d’un automate Le choix d’un Automate Programmable Industriel s’effectue principalement en fonction : Du nombre d’entrées sorties De la tension des entrées/sorties De la tension d’alimentation Du langage de programmation utilisé De la puissance de traitement De la communication éventuelle avec un réseau d’entreprise Des possibilités d’extension Des caractéristiques liées à l’environnement Du nombre de Simatic S7 de Siemens Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 72 Leçon n°11 – Programmation des Automates Industriels 1 – Terminal de programmation d’écrire un programme dans la mémoire de l’automate, de le modifier, mais également de mettre en service le système ou encore d’assurer sa maintenance. Il permet La programmation des automates peut également être effectuée par chargement à partir d’un micro-ordinateur sur lequel se trouve un logiciel de programmation. Les terminaux de programmation peuvent généralement être utilisés : - En bureau d’étude en mode local afin de préparer Sur le site, relié à l’automate, afin de : le programme. o transférer le programme dans l’automate o assurer la mise en service o régler les différents paramètres (temporisations, etc.) Ordinateur de bureau pour programmation en bureau d’étude Consoles de programmations ou ordinateur portable pour préparation du programme sur site 2 – Démarche de programmation d’un API La programmation d’un automate industriel peut se dérouler comme suit : 1. 2. 3. 4. 5. 6. 7. 8. matérielle et logicielle Affectation des entrées et sorties Programmation de l’automate (avec sauvegardes fréquentes !!) Simulation logicielle du programme (lorsque le logiciel le permet) Raccordement des entrées et sorties de l’automate Test des entrées et sorties (vérification de continuité) Transfert du programme sur l’automate Essai sur site Configuration Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 73 3 – Les langages de programmation L’écriture d’un programme consiste à créer une liste d’instructions permettant l’exécution des opérations nécessaires au fonctionnement du système. Il existe différents types de langages de programmation. 3-1) Le langage à contact (Ladder) il s’agit de reproduire la commande du système sous forme d’un schéma électrique. Pour établir un programme en langage à contact, Langage à contact : symboles classiques Langage à contact : symboles Ladder Signification des symboles Ladder : Contact Normalement Ouvert (F) Contact Normalement Fermé (O) Bobine de relais ou contacteur 3-2) Le langage booléen (logigramme) %I0.0 & %I0.1 %I1.2 >=1 1 %I1.5 %Q1.0 >=1 %Q0.2 & 1 La programmation en langage booléen fait appel à la représentation schématique booléenne : le logigramme ou schéma logique. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 74 3-3) Le langage GRAFCET La programmation en langage GRAFCET se fait en trois étapes : Représentation schématique du GRAFCET Définition des réceptivités associées aux transitions. Définition des actions associées aux étapes 3-4) Le langage LIST Le langage « list » fait appel aux fonctions logiques. Les calculs logiques sont effectués selon une liste d’instructions simples. 3-5) Le langage Littéral structuré Le langage littéral structure est un langage évolué qui permet d’accéder à des fonctions spécifiques. Ce langage correspond à la programmation informatique en langage de type C++. On laissera l’étude de ce langage aux informaticiens... Et, maintenant, pour bien comprendre le principe de la programmation, quoi de mieux qu’un petit exemple ? Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 75 Exemple : Commande du distributeur de colorant avec automate Zelio Niveau Système Automate Logiciel Initiation Distributeur de colorant Cf. Leçon 1 Zelio Schneider Zelio Soft Schneider Colorant Bleu Colorant Jaune Y1 Y2 M S2 Pot de mélange S3 S4 S1 S5 Présentation du système (détails dans la leçon 1) Colorant Bleu Colorant Jaune Y1 Légendes : Y2 Y1 = électrovanne pour le colorant bleu Y2 = électrovanne pour le colorant jaune S1 = détecteur de présence d’un pot S2 = détecteur de pot rempli S3 = bouton poussoir de sélection du bleu S4 = bouton poussoir de sélection du jaune S5 = bouton poussoir de sélection du vert M = moteur du mélangeur M Equations du système : S2 Pot de mélange S3 S4 S1 S5 M = S1 . S2\ . (S3 + S4 + S5) Y1 = S1 . S2\ . (S3 + S5) Y2= S1 . S2\ . (S4 + S5) Une fois le logiciel Zelio Soft lancé : Etape 1 : Configuration du matériel Etape 2 : Affectation entrées-sorties Sélectionnez la version du module que vous souhaitez programmer. Etablissez un tableau pour affecter chacune des entrées et des sorties Le module choit précédemment possède : 6 entrées TOR 4 sorties TOR I1 I2 I3 I4 I5 I6 Choix du module référence : SR1 – B101FU Entrées TOR S1 S2 S3 S4 S5 réserve Q1 Q2 Q3 Q4 Sorties TOR M Y1 Y2 réserve L’affectation des entrées et sorties se fait de manière tout à fait arbitraire, mais il est préférable d’avoir une répartition logique. Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 76 Etape 3 : Programmation (langage à contact LADDER) Etablissez le schéma à contact correspondant au fonctionnement souhaité. Important : Un programme doit toujours contenir un maximum de commentaires. Cela facilite la programmation, mais surtout la mise en service et le dépannage, ou d’éventuelles modifications. Etape 4 : Simulation logicielle Le logiciel Zelio Soft permet de simuler le programme sans même la présence de l’automate. Ainsi, en agissant sur les différentes les entrées, on peut vérifier qu’on obtienne bien le fonctionnement souhaité sur sorties. Ph N F1 2A Si le programme fonctionne, on passe à la suite… Etape 6 : Tests des entrées / sorties L N I1 I2 I3 S5 S4 S3 S1 Effectuez le raccordement. Les entrées et sorties sont en 230 V – 50 Hz S2 Etape 5 : Raccordement de l’automate I4 I5 I6 Zelio- Schneider SR1-B101FU Tests des entrées : les informations parviennent correctement à l’automate. Actionnez les capteurs et BP pour vérifier que Tests des sorties : Q1 Q2 Q3 Q4 les préactionneurs fonctionnent correctement. Forcez les sorties pour vérifier que Si tout ne fonctionne pas, vérifiez la continuité. KM 230 V Y1 230 V Y2 230 V Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 77 Etape 7 : Transfert du programme dans l’automate Pour transférer le programme, il faut relier cordon approprié. Ensuite, lancez l’action : le terminal de programmation à l’automate avec le transfert PC Module. Etape 8 : Mise en service Pour mettre en service l’automate, il faut bien sur le mettre sous tension, mais il faut aussi le mettre en run. RUN = Marche STOP = Arrêt La grande majorité des API utilise ce vocabulaire. Modification du fonctionnement L’utilisateur veut désormais que si l’on donne une impulsion pour demander une couleur de colorant, les vannes restent ouvertes jusqu’à ce que le pot soit rempli. (L’opérateur ne doit plus être obligé de tenir les BP appuyés). Effectuez les modifications correspondantes. Et tout cela sans toucher au câblage ! Génial, non ?... Livret de cours 1ère BAC ELEEC – L’automatisation industrielle 78
© Copyright 2026 Paperzz