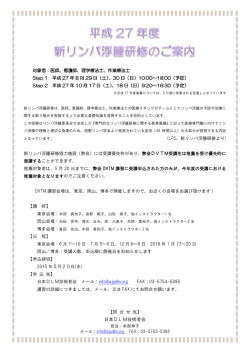
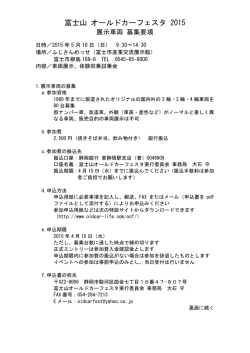
株式会社日新テクニカ ARM9/2440 シリーズ Linux-2.6.32/Android-2.1/WinCE6.0 株式会社日新テクニカ http://nissin-tech.com ARM自宅サーバhttp://kanebebe.dip.jp 2011/6/25 Micro2440 Kane BeBe III ARM9/2440 Mini2440 copyright@2009~2011 ホームページ:http://nissin-tech.com メール:[email protected] 1 株式会社日新テクニカ 修正履歴 修正日 2011/06/25 2011/04/09 修正内容 1. USB WiFi ツールを実装しました、より多い USB WiFi に対応して おります。 2. 専用プラスチック・ケースを揃っていました。 付録を ARM 自宅サーバに移動いたしました。ご参照ください http://kanebebe.dip.jp 2010/12/26 USB Bluetooth の使い方(9.4) Bluez-4.82, Bluez-3.36, Bluez-2.25 をすべて揃っていました。 2010/12/22 1GB NAND に交換する方法(付録 A) 2010/11/28 1. Android2.1 にアップデートする 2. Android アプリケーションの開発とデバッグ 2010/11/10 1. Kane BeBe III ARM9/2440 ボードの説明 2. Windows の仮想マシン VMware に Linux(ubuntu)をインストール 3. クロスコンパイルが arm-linux-gcc-4.4.3(EABI)にアップデート 4. GUI QtE-4.6.3 を増加し、Qtopia-2.2.0 と一緒に動ける 5. Linux には NEC4.3 インチ液晶のドライバを増加 6. サポートしている USB WiFi アダプタを増加 メーカ: TP-LINK * TL-WN321G+ * TL-WN322G+ * TL-WN422G+ * TL-WN721N * TL-WN722N メーカ: QCOM * LR802UKG 二つの GUI があるので、64MB 版に対応しません。ご了承ください。 2010/3/15 1. Linux2.6.32.2 にアップデート 2. WindowsCE6.0R3 の BSP を発表 3. Android に対応 ホームページ:http://nissin-tech.com メール:[email protected] 2 株式会社日新テクニカ 第一章 ARM9/2440 シリーズボードの概要......................................................................... 9 1.1 仕様 ............................................................................................................................ 9 1.2 使えるデバイス例..................................................................................................... 18 1.3 付属アプリケーション例.......................................................................................... 20 1.4 Kane BeBe III 2440/MINI2440/micro2440 の異同点.............................................. 21 第二章 Kane BeBe III 2440 インターフェースの説明 ...................................................... 22 2.1 PAコネクタ(シリアルポート, SPI, I2C, USBなど)................................................... 22 2.2 PBコネクタ(LCD、CMOS CAMERAなど).............................................................. 23 2.3 Audioコネクタ .......................................................................................................... 23 2.4 PCコネクタ(システムバスなど)................................................................................ 24 第三章 MINI2440 インターフェースの説明...................................................................... 25 3.1 電源 .......................................................................................................................... 25 3.2 ユーザーボタン ........................................................................................................ 26 3.3 シリアルポート ........................................................................................................ 26 3.4 液晶LCDインターフェース...................................................................................... 27 3.5 JTAG......................................................................................................................... 27 3.6 GPIO......................................................................................................................... 28 3.7 CMOS CAMERA...................................................................................................... 29 3.8 システムバス............................................................................................................ 30 3.9 リセット ................................................................................................................... 31 3.10 AD ........................................................................................................................... 31 3.11 PWMブザー ............................................................................................................ 32 第四章 Micro2440 インターフェースの説明 ..................................................................... 33 4.1 PAコネクタ(シリアルポート, SPI, I2C, USBなど)................................................... 33 4.2 PBコネクタ(LCD、CMOS CAMERAなど).............................................................. 34 4.3 PCコネクタ(システムバスなど)................................................................................ 35 第五章 初体験(GUI)........................................................................................................... 36 5.1 タッチパネルの補正 ................................................................................................. 36 5.2 MP3 の再生............................................................................................................... 37 5.3 ビデオの再生............................................................................................................ 38 5.4 ピクチャのビューと編集.......................................................................................... 39 5.5 SDとUSBメモリの自動認識 ..................................................................................... 40 5.6 ターミナル ............................................................................................................... 41 5.7 ネットワークの設定 ................................................................................................. 42 5.8 ping........................................................................................................................... 42 ホームページ:http://nissin-tech.com メール:[email protected] 3 株式会社日新テクニカ 5.9 LEDテスト................................................................................................................ 43 5.10 EEPROMテスト ..................................................................................................... 44 5.11 PWMブザー ............................................................................................................ 45 5.12 音声のレコーダー................................................................................................... 46 5.13 USBカメラ.............................................................................................................. 47 5.14 CMOSイメージセンサー ........................................................................................ 47 5.15 ADテスト ................................................................................................................ 48 5.16 ボタン .................................................................................................................... 48 5.17 手書き .................................................................................................................... 49 5.18 Watch dog............................................................................................................... 50 5.19 回転 ........................................................................................................................ 51 5.20 スタートアップ ...................................................................................................... 52 5.21 USB GPS ................................................................................................................ 53 第六章 初体験(コンソール) ................................................................................................ 54 6.1 ハードウェアの接続と設定 ...................................................................................... 54 6.1.1 Kane BeBe III ARM9/2440 ............................................................................... 54 6.1.2 mini/micro2440.................................................................................................. 61 6.1.3 パソコン側のハイパーターミナルの設定 .......................................................... 61 6.2 MP3 の再生............................................................................................................... 63 6.3 USBメモリと外付けハードディスク ........................................................................ 63 6.4 SD/MMCカード ........................................................................................................ 64 6.5 シリアルポートでファイルをARM9 にダウンロード .............................................. 65 6.6 シリアルポートでARM9 のファイルをPCに保存 .................................................... 67 6.7 LED制御 ................................................................................................................... 68 6.8 ボタンのテスト ........................................................................................................ 69 6.9 シリアルポートのテスト.......................................................................................... 70 6.10 ブザー(PWM)のテスト........................................................................................... 71 6.11 LCDのバックライト ............................................................................................... 71 6.12 I2C-EEPROM......................................................................................................... 72 6.13 ADテスト ................................................................................................................ 72 6.14 CMOSイメージセンサー ........................................................................................ 73 6.15 ネットワーク機能 ................................................................................................... 73 6.15.1 ウェブサーバー................................................................................................. 73 6.15.2 TelnetとFtp機能............................................................................................... 74 6.15.3 DNSとgatewayの設定 ..................................................................................... 74 6.15.4 MACアドレスの設定 ........................................................................................ 74 ホームページ:http://nissin-tech.com メール:[email protected] 4 株式会社日新テクニカ 6.15.5 ネットワーク・ファイルシステム(NFS)のマウント ....................................... 74 6.15.6 IPアドレスを自動的に取得する ....................................................................... 74 6.16. RTCの設定............................................................................................................. 74 6.17 液晶(LCD)画面を取ります..................................................................................... 75 6.18 USB無線LAN ......................................................................................................... 75 第七章 開発環境の構築 ...................................................................................................... 78 7.1 仮想マシンでubuntuをインストールする ............................................................... 78 7.2 クロスコンパイルツールをインストールする.......................................................... 93 7.3 Linuxのコンパイル................................................................................................... 95 7.3.1 Linux用のブートローダ....................................................................................... 95 7.3.2 Linuxのカーネル ................................................................................................. 95 7.3.3 ファイルシステム............................................................................................... 96 7.3.4 busybox................................................................................................................ 96 7.3.5 GUIシステムqtopia.............................................................................................. 97 7.3.6 Linuxの起動logo .................................................................................................. 97 7.3.7 Linuxアプリケーションのサンプル..................................................................... 98 7.4 NFSサーバを構築 ..................................................................................................... 99 7.5 NFSからブートする ............................................................................................... 100 第八章 Linux環境のアプリケーションを開発 ................................................................. 102 8.1 Hello, World! .......................................................................................................... 102 8.2 Hello,Worldをコンパイル....................................................................................... 102 8.3 Hello,WorldをARM9 ボードで実行........................................................................ 102 8.4 ほかのサンプル ...................................................................................................... 102 8.5 Qt/Embedded GUIプログラムを作る..................................................................... 103 第九章 Linuxカーネルを再構築....................................................................................... 104 9.1 ドライバの場所 ...................................................................................................... 104 9.2 Linuxカーネルのコンフィグ .................................................................................. 106 9.2.1 LCD液晶とバックライト ................................................................................. 107 9.2.2 タッチパネル ................................................................................................... 110 9.2.3 USBマウスとキーボード ................................................................................. 112 9.2.4 USBメモリ ....................................................................................................... 113 9.2.5 汎用USBカメラ ............................................................................................... 116 9.2.6 CMOSイメージセンサー(OV9650) .................................................................. 119 9.2.7 イーサネット ................................................................................................... 120 9.2.8 USB無線LAN................................................................................................... 124 9.2.9 オーディオ....................................................................................................... 128 ホームページ:http://nissin-tech.com メール:[email protected] 5 株式会社日新テクニカ 9.2.10 SD/MMCメモリカード................................................................................... 131 9.2.11 Watchdog........................................................................................................ 132 9.2.12 LED................................................................................................................ 133 9.2.13 ボタン ............................................................................................................ 134 9.2.14 PWMブザー ................................................................................................... 134 9.2.15 AD .................................................................................................................. 135 9.2.16 シリアルポート.............................................................................................. 135 9.2.17 リアルタイマーRTC ...................................................................................... 136 9.2.18 I2C - EEPROM .............................................................................................. 137 9.2.19 yaff2sファイルシステム.................................................................................. 139 9.2.20 EXT2/VFAT/ NFSファイルシステム .............................................................. 143 9.2.21 ARM7TDMI/LPC2148 との通信.................................................................... 145 9.3 Linuxドライバの開発入門 ...................................................................................... 148 9.3.1 簡単なドライバのソースコード ...................................................................... 148 9.3.2 コンフィグファイルを編集します ................................................................... 148 9.3.3 Makefileを編集 ................................................................................................ 150 9.3.4 ドライバをコンパイルします .......................................................................... 151 9.3.5 ARM9 ボードでドライバをインストールします.............................................. 151 9.4 USB Bluethoothの使い方.......................................................................................... 151 9.4.1 Linuxカーネルのコンフィグ ............................................................................. 151 9.4.2 Bluezをコンパイルする ..................................................................................... 154 9.4.3 Bluetoothの動作確認.......................................................................................... 157 第十章 生成されたファイルを書き込む........................................................................... 161 10.1 NOR Flashから起動 ............................................................................................... 161 10.2 USBドライバのインストール................................................................................ 162 10.3 NAND Flashのパーティション............................................................................... 165 10.4 ブートロードの書き込み....................................................................................... 166 10.5 Linuxのカーネルの書き込み ................................................................................ 167 10.6 ルート・ファイルシステムの書き込み ................................................................ 169 10.7 NAND Flashのバックアップ ............................................................................... 170 10.8 NAND Flashのリストア....................................................................................... 172 第十一章 NOR Flashのブートロードを更新 ................................................................... 174 11.1 H-JTAGで書き込み ............................................................................................ 174 11.1.1 H-JTAGをダウンロードとインストールします............................................... 174 11.1.2 NOR Flashを書き込む ................................................................................... 178 11.2 USB Open-Linkで書き込み ................................................................................ 183 ホームページ:http://nissin-tech.com メール:[email protected] 6 株式会社日新テクニカ 11.3 Open-JTAGで書き込み ....................................................................................... 188 11.3.1 ドライバをインストールする ........................................................................ 189 11.3.2 書き込み......................................................................................................... 191 第十二章 Webカメラストリーミング配信 ....................................................................... 193 12.1 MJPG-streamerのダウンロードとコンパイル..................................................... 193 12.2 MJPG-streamerをmini/micro2440 ボードにインストール ................................. 193 12.3 WebブラウザでWebカメラを見ましょう ............................................................. 194 第十三章 Eclipse + GCC + Open-JTAG.......................................................................... 195 13.1 GCCツールチェーン ............................................................................................. 195 13.2 Integrated Development Environment(Eclipse)................................................. 197 13.3 プロジェクトを作る ............................................................................................. 201 13.4 Eclipseプラグイン(Zylin Embedded CDT)インストール..................................... 203 13.5 ビルドの設定 .......................................................................................................... 208 13.6 ビルド..................................................................................................................... 211 13.7 GDBの設定 ........................................................................................................... 213 13.8 OpenOCDの設定 .................................................................................................. 219 13.9 デバッグ ............................................................................................................... 223 13.10 デバッグ終了...................................................................................................... 229 第十四章 Android-2.1 ...................................................................................................... 231 14.1 初体験 .................................................................................................................. 231 14.2 カーネルのコンパイル ......................................................................................... 235 14.3 ファイルシステムのイメージを生成 .................................................................... 236 14.4 Android開発環境の構築(Windows編)................................................................... 236 14.4.1 Android SDKのインストール........................................................................... 237 14.4.2 Eclipseのインストール..................................................................................... 239 14.4.3 JREのインストール......................................................................................... 240 14.4.4 ADTプラグインのインストール ...................................................................... 243 14.4.5 アップデートとSDK設定 ................................................................................ 249 14.4.6 仮想Androidデバイスの設定........................................................................... 255 14.4.7 Hello Worldプロジェクトの作成...................................................................... 259 14.4.8 プロジェクトのデバッグ ................................................................................ 264 14.5 開発されたアプリ(apk)をボードにインストールする ......................................... 266 Windows CE6.0 ............................................................................................................... 267 15.1 Windows CE6.0 の開発環境をインストールする................................................. 267 15.1.1 VS2005 のインストール ................................................................................... 268 15.1.2 VS2005 のパッチ.............................................................................................. 273 ホームページ:http://nissin-tech.com メール:[email protected] 7 株式会社日新テクニカ 15.1.3 WinCE6.0 のインストール............................................................................... 274 15.1.4 Windows Embedded CE 6.0 Platform Builder Service Pack 1............................ 278 15.1.5 WinCE6.0R2 のインストール .......................................................................... 282 15.1.6 WinCE6.0 のアップデート............................................................................... 286 15.1.7 WinCE6.0R3 のインストール .......................................................................... 287 15.2 mini2440 のBSPをインストールする................................................................... 290 15.3 ドライバの場所 .................................................................................................... 290 15.4 WinCE6 のコンパイル.......................................................................................... 291 15.5 WinCE6 を書き込む ............................................................................................. 292 15.5.1 NANDをフォーマットする .............................................................................. 293 15.5.2 WinCEのブートローダ .................................................................................... 293 15.5.3 起動logo .......................................................................................................... 295 15.5.4 WinCEを書き込む ........................................................................................... 296 15.6 WinCE6 の初体験................................................................................................. 298 15.6.1 タッチパネルの補正 ....................................................................................... 298 15.6.2 SDカード/USBメモリ....................................................................................... 300 15.6.3 周辺機能のテスト ........................................................................................... 300 15.7 WinCEの起動logo................................................................................................. 301 15.8 USB同期ドライバ................................................................................................. 304 15.9 WinCEとパソコンの同期 ..................................................................................... 307 15.10 SDKの生成 ......................................................................................................... 312 15.11 SDKのインストール ........................................................................................... 313 15.12 WinCE6.0 アプリケーションの開発................................................................... 318 15.13 アプリケーションのDebug ................................................................................ 320 付録A:NAND Flashを 1GBに交換 ................................................................................ 324 ※ 使用されたソースコードはhttp://nissin-tech.com/からダウ ンロードできます。 ※ この文書の情報は、事前の通知なく変更されることがあり ます。 ※ (株)日新テクニカの書面による許可のない複製は、いかなる 形態においても厳重に禁じられています。 http://kanebebe.dip.jp ホームページ:http://nissin-tech.com メール:[email protected] 8 株式会社日新テクニカ 第一章 ARM9/2440 シリーズボードの概要 1.1 仕様 USB シリア PC(システムバス) PB(LCD, Camera) ルポート LCD I/F PA(GPIO, I2C, AD, UART 等) Nor/NAND 音声 USB モード選択 入出力 device Kane BeBe III ARM9/2440 Kane BeBe III ARM9/2440 は多種の液晶を接続できます。写真は 3.5”液晶を接続する様子。 ホームページ:http://nissin-tech.com メール:[email protected] 9 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 10 株式会社日新テクニカ 大容量 RTC 電池 CR2032 を実装された様子。 専用のプラスチック・ケース ホームページ:http://nissin-tech.com メール:[email protected] 11 株式会社日新テクニカ ARM9/2440 によって作られたサーバが動作する風景です。後ろの黒いケースはポータブ ル・ハードディスクです。 ホームページ:http://nissin-tech.com メール:[email protected] 12 株式会社日新テクニカ LCD I/F LCD 3.3/5V J2 CMOS Camera Reset Switch GPIO DC5V 34pin 1.3mm AD COM0 test COM1 User LED 日新テクニカ COM2 10M/100M SD/MMC RJ45 USB USB Slave Host Audio User Out Button Line JTAG Bus User 44pin button MIC Audio Nor/Nand In Select S2 ※ 液晶は 3.3V/5V 二種類があります。MINI2440 の電圧選択ジャンパ ー(J2)は必ず正しく設定されなければなりません。 MINI2440 ボード ホームページ:http://nissin-tech.com メール:[email protected] 13 株式会社日新テクニカ Micro2440 のコアボード タッチパネル I/F COM2 COM3 GPIO CMOS カメラ I/F 電源とス イッチ MIC AD ボリューム 音の出力 SD ソケット COM1:TTL COM1 COM2:TTL COM3:TTL USB HOST1 USB Slave USB HOST3 USB HOST4 USB HOST2 LCDI/F タッチパネル I/F LAN RJ45 リセット NOR NAND システムバス RTC 電池 ブザー ユーザボタン Micro2440 ブレッドボードの拡張基板 micro2440SDK ホームページ:http://nissin-tech.com メール:[email protected] 14 株式会社日新テクニカ CPU プロセッサー • ARM920T コアを採用したサムソン(SAMSUNG)社の S3C2440A、周波数 400MHz、 最高周波数 533MHz。 メモリ • 64MB SDRAM, 32 ビット幅データ・バス, SDRAM の周波数 100MHz • 64MB/128MB/256MB/512MB/1GB NAND Flash メモリ • 2MB NOR Flash メモリ 液晶(LCD) • 4 線式抵抗膜方式のタッチパネルのインターフェース • 標準の LCD I/F を持って、3.5”から 12.1”までの各種液晶パネル(黒白、STN、TFT、 最高分解能 1024*768)に対応します。 共有周辺機能: • 10M/100MBase-T Ethernet RJ45(DM9000) × 1 • RS232 シリアルポート× 3 • USB1.1 ホスト × 1 • USB1.1 スレーブ × 1 • MMC/SD メモリカードのソケット × 1 • ステレオ・オーディオの出力 × 1 • マイクの入力 × 1 • 10 ピンの JTAG(2mm DIP ピッチ) • ユーザーLED × 4 Mini と micro2440SDK の周辺機能 ※ Kane BeBe III ARM9/2440 のすべての I/O を 2.54mm 拡張ヘッダで引き出さ れますので、簡単に拡張できます。 • ユーザー・ボタン × 6 • PWM 制御の圧電ブザー × 1 • 可変抵抗、A/D のテストの為に × 1 • I2C バスの AT24C08、I2C バスのテストの為に × 1 • 20 ピン CMOS カメラのインターフェース(2mm DIP ピッチ) ホームページ:http://nissin-tech.com メール:[email protected] 15 株式会社日新テクニカ • RTC のバッテリーバックアプ • 34 ピン GPIO(2mm DIP ピッチ) • 44 ピンのシステムバス(2mm DIP ピッチ) 搭載した OS • • • Linux2.6.32 + Qtopia2.2.0 + QtE-4.6.3 Android-2.1 WindowsCE.NET 6.0R3 外形寸法 • • • Kane BeBe III 2440: 64 × 99(mm) 突起物は除く Mini2440: 100 × 100(mm) 突起物は除く Micro2440SDK: 130 × 180(mm) 突起物は除く 供給電源 • Kane BeBe III 2440: 5VDC 電源、プラグ 2.1mmφ、極性はセンタープラス です。電源指示 LED 付き • Mini/micro2440: 5VDC 電源、プラグ 1.3mmφ 、極性はセンタープラス です。電源スイッチと電源指示 LED 付き ※ 市販の 5V AC アダプタは一般的にプラグ 2.1mmφ を使用し ています。ご注意ください。 ボードは二つの動作モードがあります。一つは Nor Flash モード(Flash を更新する用)。もう 一つは Nand Flash モード(Linux/WinCE などが動くモード)。この二つのモードにはメモリマ ップが異なります。ご注意ください。 ホームページ:http://nissin-tech.com メール:[email protected] 16 株式会社日新テクニカ デフォルトの設定は Nand Flash モードです。 ホームページ:http://nissin-tech.com メール:[email protected] 17 株式会社日新テクニカ 1.2 使えるデバイス例 USB 無線 LAN 装置 USB マウスとキーボード USB カメラ USB メモリ 32GB までの 外付けハードディスク USB HUB SD/MMC メモリ PL2303 USB シリアルポート USB-PC104 変換ボー ドで各社の PC104 モ ジュールを使えます。 ホームページ:http://nissin-tech.com メール:[email protected] 18 株式会社日新テクニカ 3.5/4.3/7 インチ液 晶 800 × 600 又は 1024 × 768 VGA ※ 付属のドライバ以外は、使えない可能性があります。 ホームページ:http://nissin-tech.com メール:[email protected] 19 株式会社日新テクニカ 1.3 付属アプリケーション例 Qtopia デス mpeg 映画 クトップ WindowsCE6.0 ホームページ:http://nissin-tech.com MP3 Web displayer ブラウザー Android-2.1 メール:[email protected] 20 株式会社日新テクニカ 1.4 Kane BeBe III 2440/MINI2440/micro2440 の異同点 Kane BeBe III 2440 と MINI2440 と micro2440SDK は同じロジックです。物理の構造だけが異 なります。ソフトウェアと周辺機器は全て通用です。次は異なる点: Kane BeBe III ARM9/2440 Mini2440/Micro2440SDK サイズは 64 × 99mm と超コンパクト 100 × 100mm Mini2440 は 4 層 8 層基板、信頼性が高く Micro2440 コアボードは 6 層、拡張基板 は2層 すべての I/O を 2.54mm 拡張ヘッダで引き出され, 市販の蛇目基板が使える 一部だけの 2mm 拡張ヘッダ 市販の 5V アダプタ(プラグ 2.1mmφ)が使える 専用のプラグ 1.3mmφ アダプタ 1GB NAND を標準搭載 256MB NAND, 1GB オプション 大容量 RTC 電池 CR2032 が使える CR1220 内蔵 USB-RS232 変換(CP2102)、RS232 ポートない パソコンでも直接使える なし 一般的な応用分野: Kane BeBe III ARM9/2440 は製品向け Mini2440 はホビー向け Micro2440SDK は開発者向け ホームページ:http://nissin-tech.com メール:[email protected] 21 株式会社日新テクニカ 第二章 Kane BeBe III 2440 インターフェースの説明 2.1 PA コネクタ(シリアルポート, SPI, I2C, USB など) ピン 機能 1 説明 ピン 機能 5V 2 GND 3 DN0 4 DP0 5 DN1 6 DP1 7 L3CLOCK 8 CDCLK 9 L3MODE 10 L3DATA 11 I2SSCLK 12 I2SSDI 13 I2SLRCK 14 I2SSDO 15 LCDVF0 16 OM0 17 RXD0 18 TXD0 19 RXD1 20 TXD1 21 RXD2 22 TXD2 23 SDDATA0 24 SDDATA1 25 SDDATA2 26 SDDATA3 27 WP_SD 28 SDCLK 29 SDCMD 30 AIN0 31 AIN1 32 AIN2 33 EINT19 34 EINT18 35 EINT17 36 EINT16 37 EINT15 38 EINT14 39 EINT13 40 EINT11 41 EINT8 42 EINT6 43 EINT5 44 EINT4 45 EINT3 46 EINT2 47 EINT0 48 EINT1 49 I2CSDA 50 I2CSCL 51 nCTS0 52 nRTS0 53 VDDRTC 54 M_nRESET 55 GPB0 56 GPB1 ホームページ:http://nissin-tech.com 説明 メール:[email protected] 22 株式会社日新テクニカ 2.2 PB コネクタ(LCD、CMOS CAMERA など) ピン 機能 1 説明 ピン 機能 CAMDATA7 2 CAMDATA6 3 CAMDATA5 4 CAMDATA4 5 CAMDATA3 6 CAMDATA2 7 CAMDATA1 8 CAMDATA0 9 CAMCLK 10 CAM_PCLK 11 CAM_VSYNC 12 CAM_HREF 13 EINT20 14 CAMRST 15 LEND 16 VLINE 17 VD0 18 VD1 19 VD2 20 VD3 21 VD4 22 VD5 23 VD6 24 VD7 25 VD8 26 VD9 27 VD10 28 VD11 29 VD12 30 VD13 31 VD14 32 VD15 33 VD16 34 VD17 35 VD18 36 VD19 37 VD20 38 VD21 39 VD22 40 VD23 41 VCLK 42 LCD_PWR 43 VM 44 VFRAME 45 TSYP 46 TSXP 47 TSYM 48 TSXM 49 VDD5V 50 GND 説明 2.3 Audio コネクタ ピン 機能 説明 ピン 機能 説明 1 Lin 左入力 2 Rin 右入力 3 GND GND 4 +5V 電源 5 Lout 左出力 6 Rout 右出力 ホームページ:http://nissin-tech.com メール:[email protected] 23 株式会社日新テクニカ 2.4 PC コネクタ(システムバスなど) ピン 機能 1 説明 ピン 機能 LnGCS1 2 LnGCS2 3 LnGCS3 4 LnGCS4 5 LnWE 6 nWAIT 7 LnOE 8 nRESET 9 LnWBE1 10 nXDACK0 11 EINT9/GPG1 12 nXDREQ0 13 EINT7/GPF7 14 LADDR23 15 LADDR24 16 LADDR21 17 LADDR22 18 LADDR19 19 LADDR20 20 LADDR17 21 LADDR18 22 LADDR0 23 LADDR2 24 LADDR1 25 LADDR4 26 LADDR3 27 LADDR6 28 LADDR5 29 LADDR8 30 LADDR7 31 LADDR10 32 LADDR9 33 LADDR12 34 LADDR11 35 LADDR14 36 LADDR13 37 LADDR16 38 LADDR15 39 LDATA0 40 LDATA1 41 LDATA2 42 LDATA3 43 LDATA4 44 LDATA5 45 LDATA6 46 LDATA7 47 LDATA8 48 LDATA9 49 LDATA10 50 LDATA11 51 LDATA12 52 LDATA13 53 LDATA14 54 LDATA15 55 VDD5V 56 GND ホームページ:http://nissin-tech.com 説明 メール:[email protected] 24 株式会社日新テクニカ 第三章 MINI2440 インターフェースの説明 3.1 電源 ホームページ:http://nissin-tech.com メール:[email protected] 25 株式会社日新テクニカ 3.2 ユーザーボタン K1 K2 K3 K3 K4 K5 割り込み EINT8 EINT11 EINT13 EINT14 EINT15 EINT19 GPIO GPG0 GPG3 GPG5 GPG6 GPG7 GPG11 他の機能 なし nSS1 SPIMISO1 SPIMOSI1 SPICLK1 TCLK1 CON12 CON12.1 CON12.2 CON12.3 CON12.4 CON12.5 CON12.6 ※ CON12.7 は 3.3V 電源、CON12.8 は GND です。 3.3 シリアルポート ホームページ:http://nissin-tech.com メール:[email protected] 26 株式会社日新テクニカ 3.4 液晶 LCD インターフェース LCD インターフェースは最大 RGB(888)の液晶をサポートします。37,38,39,40 ピンは四線 抵抗式のタッチパネルの入力です。J2 は液晶給電の選択、5V 又は 3.3V の液晶に対応しま す。 3.5 JTAG ホームページ:http://nissin-tech.com メール:[email protected] 27 株式会社日新テクニカ 3.6 GPIO CON4 名前 説明 CON4 名前 説明 1 VDD5V 5V 電源 2 VDD33V 3.3V 出力 3 GND GND 4 nRESET リセット出力 5 ANI0 AD ch0 6 AIN1 AD ch1 7 ANI2 AD ch2 8 AIN3 AD ch3 9 EINT0 EINT0/GPF0 10 EINT1 EINT1/GPF1 11 EINT2 EINT2/GPF2 12 EINT3 EINT3/GPF3 13 EINT4 EINT4/GPF4 14 EINT5 EINT5/GPF5 15 EINT6 EINT6/GPF6 16 EINT8 EINT8/GPG0 17 EINT9 EINT9/GPG1 18 EINT11 EINT11/GPG3/nSS1 19 EINT13 EINT13/GPG5/SPIMISO1 20 EINT14 EINT14/GPG6/SPIMOSI1 21 EINT15 EINT15/GPG7/SPICLK1 22 EINT17 EINT17/GPG9/nRST1 23 EINT18 EINT18/GPG10/nCTS1 24 EINT19 EINT19/GPG11 25 SPIMISO SPIMISO /GPE11 26 SPIMOSI SPIMOSI /EINT14/GPG6 27 SPICLK SPICLK /GPE13 28 nSS_SPI nSS_SPI /EINT10/GPG2 29 I2CSCL I2CSCL/GPE14 30 I2CSDA I2CSDA/GPE15 31 GPB0 TOUT0/ GPB0 32 GPB1 TOUT1/ GPB1 33 CLKOUT0 CLKOUT0/GPH9 34 CLKOUT1 CLKOUT1/GPH10 ホームページ:http://nissin-tech.com メール:[email protected] 28 株式会社日新テクニカ 3.7 CMOS CAMERA CAMERA 名前 他の機能 CAMERA 名前 他の機能 1 I2CSDA GPE15 2 I2CSCL GPE14 3 EINT20 GPG12 4 CAMRST GPJ12 5 CAMCLK GPJ11 6 CAM_HREF GPJ10 7 CAM_VSYNC GPJ9 8 CAM_PCLK GPJ8 9 CAMDATA7 GPJ7 10 CAMDATA6 GPJ6 11 CAMDATA5 GPJ5 12 CAMDATA4 GPJ4 13 CAMDATA3 GPJ3 14 CAMDATA2 GPJ2 15 CAMDATA1 GPJ1 16 CAMDATA0 GPJ0 17 VDD33V 3.3V 電源 18 VDD_CAM VDD_CAM 19 VDD18V 1.8V 電源 20 GND GND ホームページ:http://nissin-tech.com メール:[email protected] 29 株式会社日新テクニカ 3.8 システムバス CON5 名前 説明 CON5 名前 説明 1 VDD5V 5V 電源 2 GND GND 3 EINT17 割り込み 17 4 EINT18 割り込み 18 5 EINT3 割り込み 3 6 EINT9 割り込み 9 7 nGCS1 0x08000000 8 nGCS2 0x10000000 9 nGCS3 0x18000000 10 nGCS5 0x28000000 11 LnOE 12 LnWE 13 nWAIT 14 nRESET 15 nXDACK0 16 nXDREQ0 17 LADDR0 18 LADDR1 19 LADDR2 20 LADDR3 21 LADDR4 22 LADDR5 23 LADDR6 24 LADDR24 25 LDATA0 26 DATA1 27 LDATA2 28 DATA3 29 LDATA4 30 DATA5 31 LDATA6 32 DATA7 33 LDATA8 34 DATA9 ホームページ:http://nissin-tech.com メール:[email protected] 30 株式会社日新テクニカ 35 LDATA10 36 DATA11 37 LDATA12 38 DATA13 39 LDATA14 40 DATA115 3.9 リセット 3.10 AD ホームページ:http://nissin-tech.com メール:[email protected] 31 株式会社日新テクニカ 3.11 PWM ブザー ホームページ:http://nissin-tech.com メール:[email protected] 32 株式会社日新テクニカ 第四章 Micro2440 インターフェースの説明 4.1 PA コネクタ(シリアルポート, SPI, I2C, USB など) ピン 機能 1 説明 ピン 機能 5V 2 GND 3 EINT19/GPG11 4 EINT18/GPG10 5 EINT17/GPG9 6 EINT16/GPG8 7 EINT15/GPG7 8 EINT14/GPG6 9 EINT13/GPG5 10 EINT11/GPG3 11 EINT8/GPG0 12 EINT6/GPF6 13 EINT5/GPF5 14 EINT4/GPF4 15 EINT3/GPF3 16 EINT2/GPF2 17 EINT1/GPF1 18 EINT0/GPF0 19 WP_SD/GPH8 20 SDCLK/GPE5 21 SDCMD/GPE6 22 SDDATA2/GPE9 23 SDDATA3/GPE10 24 SDDATA0/GPE7 25 SDDATA1/GPE8 26 OM0 27 LCDVF0/GPC5 28 M_nRESET 29 DN1 30 DP1 31 DN0 32 DP0 33 AIN2 34 VDDRTC(1.8) 35 AIN0 36 AIN1 37 L3MODE/GPB2 38 L3DATA/GPB3 39 L3CLOCK/GPB4 40 I2SLRCK/GPE0 41 I2SSCLK/GPE1 42 CDCLK/GPE2 43 I2SSDI/GPE3 44 I2SSDO/GPE4 45 GPB0/TOUT0 46 GPB1/TOUT1 47 TXD2/GPH6 48 RXD2/GPH7 49 TXD1/GPH4 50 RXD1/GPH5 51 TXD0/GPH2 52 RXD0/GPH3 53 nCTS0/GPH0 54 nRTS0/GPH1 55 I2CSDA/GPE15 56 I2CSCL/GPE14 ホームページ:http://nissin-tech.com 説明 メール:[email protected] 33 株式会社日新テクニカ 4.2 PB コネクタ(LCD、CMOS CAMERA など) ピン 機能 1 説明 ピン 機能 TSYM 2 TSYP 3 TSXM 4 TSYM 5 VD22/GPD14 6 VD23/GPD15 7 VD20/GPD12 8 VD21/GPD13 9 VD18/GPD10 10 VD19/GPD11 11 VD16/GPD8 12 VD17/GPD9 13 VD14/GPD6 14 VD15/GPD7 15 VD12/GPD4 16 VD13/GPD5 17 VD10/GPD2 18 VD11/GPD3 19 VD8/GPD0 20 VD9/GPD1 21 VD6/GPC14 22 VD7/GPC15 23 VD4/GPC12 24 VD5/GPC13 25 VD2/GPC10 26 VD3/GPC11 27 VD0/GPC8 28 VD1/GPC9 29 LCD_PWR 30 VM/VDEN 31 VFRAME/VSYNC 32 VLINE/HSYNC 33 CLK 34 LEND/GPC0 35 CAMDATA7 36 CAMDATA6 37 CAMDATA5 38 CAMDATA4 39 CAMDATA3 40 CAMDATA2 41 CAMDATA1 42 CAMDATA0 43 CAMCLK 44 CAM_PCLK 45 CAM_VSYNC 46 CAM_HREF 47 EINT20/GPG12 48 CAMRESET 49 VDD5V 50 GND ホームページ:http://nissin-tech.com 説明 メール:[email protected] 34 株式会社日新テクニカ 4.3 PC コネクタ(システムバスなど) ピン 機能 1 説明 ピン 機能 EINT7/GPF7 2 EINT9/GPG1 3 LnGCS1 4 LnGCS3 5 LnGCS2 6 LnGCS5 7 LnGCS4 8 LnWE 9 LnOE 10 nRESET 11 nWAIT 12 nXDACK0 13 LADDR0 14 nXDREQ0 15 LADDR1 16 LADDR2 17 LADDR3 18 LADDR4 19 LADDR5 20 LADDR6 21 LADDR7 22 LADDR8 23 LADDR9 24 LADDR10 25 LADDR11 26 LADDR12 27 LADDR13 28 LADDR14 29 LADDR15 30 LADDR16 31 LADDR17 32 LADDR18 33 LADDR19 34 LADDR20 35 LADDR21 36 LADDR22 37 LADDR23 38 LADDR24 39 LDATA0 40 LDATA1 41 LDATA2 42 LDATA3 43 LDATA4 44 LDATA5 45 LDATA6 46 LDATA7 47 LDATA8 48 LDATA9 49 LDATA10 50 LDATA11 51 LDATA12 52 LDATA13 53 LDATA14 54 LDATA15 55 VDD5V 56 GND ホームページ:http://nissin-tech.com 説明 メール:[email protected] 35 株式会社日新テクニカ 第五章 初体験(GUI) 5.1 タッチパネルの補正 GUI システムを再インストールした後、自動的にタッチパネルの補正画面が出てきます。 ペンで“十”字の中心をタッチします。四角と中心、すべて五つの“十”字が順番に出て きます。タッチパネルがずれた場合は、マウスで設定タブのリカリブレートを選択して、 補正画面も出てきます。/etc/pointercal ファイルを削除すれば、再起動すれば、タッチパ ネルの補正画面が現れます。 ホームページ:http://nissin-tech.com メール:[email protected] 36 株式会社日新テクニカ 5.2 MP3 の再生 「アプリケーション」タブの「ミュージック」を選 択し、自動的に「ドキュメント」の MP3 ファイル をさがします。探した MP3 をチェックして、再生 ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 37 株式会社日新テクニカ 5.3 ビデオの再生 「アプリケーション」タブの「ビデオ」を選択し、 自動的に「ドキュメント」のビデオファイルを探し ます。探したビデオをチェックして、再生ボタンを 押します。 ホームページ:http://nissin-tech.com メール:[email protected] 38 株式会社日新テクニカ 5.4 ピクチャのビューと編集 「アプリケーション」タブの「ピクチャ」を選択し、 自動的に「ドキュメント」のピクチャを探します。 探したビデオをクリックして、ビューと編集できま す。 ホームページ:http://nissin-tech.com メール:[email protected] 39 株式会社日新テクニカ 5.5 SD と USB メモリの自動認識 SD カードあるいは USB メモリを ARM9 ボードに 挿入すると、システムは自動的に SD/USB メモリ を認識して、アイコンが出てきます。「アプリケー ション」タブの「システム情報」をクリックして、 「Storage」タブを選択すると、SD/USB メモリの 情報を表示します。 ホームページ:http://nissin-tech.com メール:[email protected] 40 株式会社日新テクニカ 5.6 ターミナル 「アプリケーション」タブの「ターミナル」をクリックします。パソコンがなくでも、タ ーミナルでコマンドを入力できます。 ターミナルでほかのシステム(ARM7TDMI/LPC2148)を通信する様子。 ホームページ:http://nissin-tech.com メール:[email protected] 41 株式会社日新テクニカ 5.7 ネットワークの設定 「FriendlyARM」タブの「ネットワーク設定」を選択して、ネットワークを設定きます。 5.8 ping 「FriendlyARM」タブの「ネットワーク設定」を選択して、ping をします。 ホームページ:http://nissin-tech.com メール:[email protected] 42 株式会社日新テクニカ 5.9 LED テスト 「FriendlyARM」タブの「LEDs」を選択して、 LED の点灯制御ができます。起動した後、「Stop led-player」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 43 株式会社日新テクニカ 5.10 EEPROM テスト このボタン を押すと、 書き込みし EEPROM に書き込む。 たい内容を 入力します。 書き込み進度。 読み込み進度。 このボタンを押す と、EEPROM か 読み込んだ らリードする。 内容 ホームページ:http://nissin-tech.com メール:[email protected] 44 株式会社日新テクニカ 5.11 PWM ブザー 音声の周波数が 変更できます。 ホームページ:http://nissin-tech.com メール:[email protected] 45 株式会社日新テクニカ 5.12 音声のレコーダー 録音 停止 ホームページ:http://nissin-tech.com 再生 メール:[email protected] 46 株式会社日新テクニカ 5.13 USB カメラ ※ Linux-2.6.29 以降は UVC と gspac クラスの USB カメラをサポート している。 5.14 CMOS イメージセンサー ※ OV9650 をサポートしている。 ホームページ:http://nissin-tech.com メール:[email protected] 47 株式会社日新テクニカ 5.15 AD テスト AD の数値 ARM9 ボードの可変抵抗を回ると、AD の数値が変化します。 5.16 ボタン ホームページ:http://nissin-tech.com メール:[email protected] 48 株式会社日新テクニカ 5.17 手書き ホームページ:http://nissin-tech.com メール:[email protected] 49 株式会社日新テクニカ 5.18 Watch dog ホームページ:http://nissin-tech.com メール:[email protected] 50 株式会社日新テクニカ 5.19 回転 ほしい方向を選択して、 「OK」ボタンを押します。 システムの再起動が必要かもしれません。 ホームページ:http://nissin-tech.com メール:[email protected] 51 株式会社日新テクニカ 5.20 スタートアップ 起動の時、アプリケーションを自動的に実行させ ます。Windows のスタートアップにみたい機能で す。 例は起動の時、時計を自動的に実行させます。 ホームページ:http://nissin-tech.com メール:[email protected] 52 株式会社日新テクニカ 5.21 USB GPS 秋月電子が販売している USB GPS 秋 月 電 子 が 販 売 し て い る GPS USB Dongle (GT-730F)は PL2303 という USB シリアルチップ を使用しているので、ARM9 はこのような USB GPS を直接に使えます。 「Serial」というアプリケーションを選択します。 シリアルの設定: ポート: ttyUSB0 ボーレート: 38400 ARM9と GPS が一緒に動く様子 ホームページ:http://nissin-tech.com メール:[email protected] 53 株式会社日新テクニカ 第六章 初体験(コンソール) 6.1 ハードウェアの接続と設定 6.1.1 Kane BeBe III ARM9/2440 5V 電源 USB シリア ル ポ ー ト (CP2102) Open: NAND モード Close: Nor モード ※ 写真は NOR モード、NAND の書き込み状態です。 ダウンロード用の USB ケ ー ブ ル 、 NAND モ ー ド で 必 ず抜いてください。 NAND モードは Linux または WinCE または Android が動くモードです。コンソールの体験 はこのモードにしてください。このモードでダウンロード用の USB ケーブルをパソコンに 接続しないほうがいいです。 Nor モードは NAND を書き込むモード、OS を更新用です。詳しいことは第 10 章をご参照 ください。 Kane BeBe III ARM9/2440 には USB シリアル変換チップ CP2102 を実装しますので、初パソ コンを接続すると、ドライバをインストールすることが必要です。 CP2102 のドライバはこちらです。弊社の HP からもダウンロードできます。 https://www.silabs.com/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspx ホームページ:http://nissin-tech.com メール:[email protected] 54 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 55 株式会社日新テクニカ 「参照」ボタンで CP2102 ドライバのフォルダを選択し、「次へ」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 56 株式会社日新テクニカ もう一つのドライバをインストールする: ホームページ:http://nissin-tech.com メール:[email protected] 57 株式会社日新テクニカ 「参照」ボタンで同じ CP2102 ドライバのフォルダを選択し、「次へ」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 58 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 59 株式会社日新テクニカ インストール完了すると、デバイスマネージャで CP2102 のシリアルポート番号が見えま す。例は COM9 です。次のハイパーターミナルの設定はこのシリアルポート番号を入力し てください。 ホームページ:http://nissin-tech.com メール:[email protected] 60 株式会社日新テクニカ 6.1.2 mini/micro2440 DB9 メス-メス型のストレートケーブルで mini/micro2240 とパソコンを接続する。 シリアルポートがないパソコンは市販の USB シリアル変換ケーブルを利用できます。 ※ 一般的に市販の DB9 メス-メス型のケーブルはクロスケーブルです。ご注意ください。 6.1.3 パソコン側のハイパーターミナルの設定 パソコンのメニュー:スタート Æ すべてのプログラム Æ アクセサリ Æ 通信 Æ ハイ パーターミナルを選ぶと、次の画面が出てきます。 このハイパーターミナルの名前を入力して、"OK"ボタンを押すと。 ホームページ:http://nissin-tech.com メール:[email protected] 61 株式会社日新テクニカ 使用したいシリアルポートを選んでください。 シリアル通信速度を 115200bps に設定します。フロー制御はなしです。 "OK"ボタンを押すと、設定が完了します。 ホームページ:http://nissin-tech.com メール:[email protected] 62 株式会社日新テクニカ 6.2 MP3 の再生 コマンド madplay ソースコード madplay.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI # madplay your.mp3 このコマンドは your.mp3 というファイルを再生します。自分で your.mp3 ファイルを用意 してください。「Ctrl+c」で停止させます。 6.3 USB メモリと外付けハードディスク USB メモリを USB ホスト又は USB ハブに挿入すると 自動的にこのような情報が出てきます。USB メモリのデバイス名は/dev/udisk です。シス テムは自動的に/udisk にマウントします。 ※ FAT32/VFAT だけの USB メモリが認識できます。 /udisk に移動して、USB メモリのファイルをリストします。 # cd /udisk # ls ホームページ:http://nissin-tech.com メール:[email protected] 63 株式会社日新テクニカ 6.4 SD/MMC カード ホームページ:http://nissin-tech.com メール:[email protected] 64 株式会社日新テクニカ SD/MMC カードを ARM9 に挿入すると、この情報が出てきます。システムは自動的に /sdcard というフォルダを生成します。 /sdcard フォルダのファイルをリストします。 # ls /sdcard 6.5 シリアルポートでファイルを ARM9 にダウンロード 「転送」Æ「ファイルの送信」を選択、 ホームページ:http://nissin-tech.com メール:[email protected] 65 株式会社日新テクニカ 送信したいファイルを選んで、「送信」ボタンを押します。 転送が正しいかどうか、md5sum コマンドで検証します。 ホームページ:http://nissin-tech.com メール:[email protected] 66 株式会社日新テクニカ 6.6 シリアルポートで ARM9 のファイルを PC に保存 保存先を設定して、「閉じる」ボタンを押します。 # sz PRODUCTS.GIF コマンドで転送が開始します。 ホームページ:http://nissin-tech.com メール:[email protected] 67 株式会社日新テクニカ 6.7 LED 制御 コマンド led-player leds ソースコード led-player.c leds.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/leds ドライバ Linux/drivers/char/mini2440_leds.c 1) LED サーバ システム起動の時、自動的に LED サーバ(led-player)を起動させます(/etc/rc.d/init.d/leds)。 LED を点滅させています。led-player を実行した後、/tmp/led-control というパイプを生成しま す。 #echo 0 0.2 > /tmp/led-control LED が 0.2 秒周期で流れます。 #echo 1 0.2 >/tmp/led-control LED が 0.2 秒周期で累計します。 #/etc/rc.d/init.d/leds stop LED を停止します。 #/etc/rc.d/init.d/leds start LED が点滅をスタートします。 2) 単独 LED 制御 #/etc/rc.d/init.d/leds stop LED サーバをストップさせます。 # led Usage: leds led_no 0|1 led_no は LED 番号(0,1,2,3)です。 #led 2 1 LED2 を点灯させます。 ホームページ:http://nissin-tech.com メール:[email protected] 68 株式会社日新テクニカ 6.8 ボタンのテスト コマンド buttons ソースコード buttons_test.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/buttons ドライバ Linux-2.6.xx/drivers/char/mini2440_buttons.c #buttons このコマンドを入力してください。 ホームページ:http://nissin-tech.com メール:[email protected] 69 株式会社日新テクニカ 6.9 シリアルポートのテスト コマンド armcomtest ソースコード Comtest.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/ttySAC0,1,2 /dev/ttyUSB0,1,2 /dev/ttyACM0,1,2 或は 或は ※ ARM9 は自分の三つのシリアルポートが/dev/ttySAC0,1,2 です。 ※ ARM9 は弊社が販売している USB-RS232 変換ケーブルを直接使え ます。デバイス名は/dev/ttyUSB0,1,2 です。 ※ ARM9 は弊社が販売している ARM7TDMI/LPC2148 と USB-PC104 変換ボードを USB で通信できます。ARM7TDMI/LPC2148 のデバイ ス名は/dev/ttyACM0,1,2 です。 このコマンドは USB-PC104 変換ボードと通信します。 #armcomtest –d /dev/ttyACM0 -o ARM9/MINI2440 は USB-PC104 変換ボードで各社の PC104 モジュールが使えます。 ホームページ:http://nissin-tech.com メール:[email protected] 70 株式会社日新テクニカ 6.10 ブザー(PWM)のテスト コマンド pwm_tset ソースコード pwm_tset.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/pwm ドライバ Linux-2.6.xx/drivers/char/pwm.c #pwm_test “+”と”-”キーは音声の周波数を変更させます。”ESC”キーは音声を停止させます。 6.11 LCD のバックライト #echo 0 > /dev/backlight #echo 1 > /dev/backlight ;バックライト消灯 ;バックライト点灯 ホームページ:http://nissin-tech.com メール:[email protected] 71 株式会社日新テクニカ 6.12 I2C-EEPROM コマンド i2c ソースコード eeprom.c 24cXX.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/i2c/0 ドライバ Linux-2.6.xx/drivers/i2c/busses/i2c-s3c2440.c # i2c –w # i2c –r ;データ(0~255)をボードの 24C08 に書き込む ;ボードの 24C08 からデータを読み出す 6.13 AD テスト コマンド adc-test ソースコード adc-test.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/adc ドライバ Linux-2.6.xx/drivers/char/mini2440_adc.c # adc-test ボードの可変抵抗をまわして、AD 数値の変化が見えます。 ホームページ:http://nissin-tech.com メール:[email protected] 72 株式会社日新テクニカ 6.14 CMOS イメージセンサー コマンド camtest ソースコード camtest.c パッケージ examples.tgz コンパイル Arm-linux-gcc-4.3.2 with EABI デバイス名 /dev/camera ドライバ Linux-2.6.xx/drivers/media/video/s3c2440camif.c # camtest CMOS イメー ジセンサー (OV9650)。 6.15 ネットワーク機能 6.15.1 ウェブサーバー Linux で ウ ェ ブ サ ー バ ー (boa) を イ ン ス ト ー ル し ま し た 。 パ ソ コ ン の ブ ラ ウ ザ ー で http://192.168.1.230 を入力すると、mini2440 のホームページが見えます。このホームペ ージを通じて、ユーザーLED と USB カメラ(*)をアクセスできます。 ※ mjpg-streamer というソフトウェアをインストールすることが必要 です。 ホームページ:http://nissin-tech.com メール:[email protected] 73 株式会社日新テクニカ 6.15.2 Telnet と Ftp 機能 Linux でクライント側とサーバー側の Telnet/Ftp をインストールしました。ご利用してく ださい。 デフォルトの設定: Telnet のユーザーネームは root です、password がありません。 Ftp のユーザーネームは plg です、password も plg です。 6.15.3 DNS と gateway の設定 DNS の IP アドレスを/etc/resolv.conf ファイルに書き込みます。 gateway の設定:# route add default gw 192.168.1.1 6.15.4 MAC アドレスの設定 # ifconfig eth0 down # ifconfig eth0 hw ether 00:11:AA:BB:CC:DD(新 MAC アドレス) # ifconfig eth0 up 00:11:AA:BB:CC:DD は新 MAC アドレスです。 新 MAC アドレスを有効するため、これらのコマンドを起動スクリプト/etc/init.d/rcS に書 き込んでください。 6.15.5 ネットワーク・ファイルシステム(NFS)のマウント まず、ネットワーク・ファイルシステムのサーバーを構築します。 # mount –t nfs –o nolock 192.168.1.111:/root_nfs /mnt 192.168.1.111 はネットワーク・ファイルシステムのサーバーの IP アドレスです。 マウント成功すれば、ARM9 は大きなリモート・ハードディスク(/mnt)を直接にアクセス できます。プログラムを開発する時が便利です。 #umount /mnt #リモート・ハードディスクを ARM9 システムから外します。 6.15.6 IP アドレスを自動的に取得する # udhcpc eth0 6.16. RTC の設定 (1)# date -s 042916352007 #今の時間を設定します:2007-04-29 16:34 (2)# hwclock -w #今の時間を S3C2440 の RTC に保存します。 (3)# hwclock -s #起動の時、Linux 時間を S3C2440 の RTC から回復します。 ※ hwclock -s コマンドをすでに起動スクリプト(/etc/init.d/rcS)に書き ホームページ:http://nissin-tech.com メール:[email protected] 74 株式会社日新テクニカ 込みました。起動の時、自動的に実行されます。 6.17 液晶(LCD)画面を取ります # snapshot pic.png 液晶(LCD)で表示された画面を pic.png というファイルに保存します。 6.18 USB 無線 LAN 使える USB 無線 LAN: メーカ: TP-LINK * TL-WN321G+ * TL-WN322G+ * TL-WN422G+ * TL-WN721N * TL-WN722N メーカ: QCOM * LR802UKG USB 無線 LAN の管理ツール(usb-wifi-kits-for-mini2440-linux-2.6.32.2-20100728.tar.gz)をボー ドにダウンロードして、ルートディレクトリに解凍します。 # tar zxvf usb-wifi-kits-for-mini2440-linux-2.6.32.2-20100728.tar.gz -C / まず、ボードの有線 LAN を閉じる。 # ifconfig eth0 down 無線環境をスキャンする # scan-wifi ホームページ:http://nissin-tech.com メール:[email protected] 75 株式会社日新テクニカ [root@FriendlyARM /]# scan-wifi cfg80211: Calling CRDA to update world regulatory domain usbcore: registered new interface driver rt73usb usb 1-1: ath9k_htc: Transferred FW: ar9271.fw, size: 51280 usb 1-1: ath9k_htc: HTC initialized with 33 credits cfg80211: Calling CRDA for country: CN Registered led device: ath9k-phy0::radio Registered led device: ath9k-phy0::assoc Registered led device: ath9k-phy0::tx Registered led device: ath9k-phy0::rx usb 1-1: ath9k_htc: USB layer initialized usbcore: registered new interface driver ath9k_hif_usb 64% WARPSTAR-317E6D(Security) スキャンされた無 54% WARPSTAR-317E6D-W(Security) 線ネットワーク 2 Access Point Found [root@FriendlyARM /]# 無線 LAN を接続する。 # start-wifi [root@FriendlyARM /]# start-wifi Usage: start-wifi mode ssid [password] mode: wpa, wpa2, wep or none no password needed if mode is none [root@FriendlyARM /]# start-wifi wpa2 WARPSTAR-317E6D 2B7F8411A8F7E udhcpc (v1.13.3) started Sending discover... ………... Sending discover... Sending select for 192.168.1.7... Lease of 192.168.1.7 obtained, lease time 14400 接続成功すれば、IP ア deleting routers ドレスなどを自動的 route: SIOCDELRT: No such process にゲットする。 adding dns 192.168.1.1 [root@FriendlyARM /]# ホームページ:http://nissin-tech.com メール:[email protected] 76 株式会社日新テクニカ ネットワークの接続を確認する。 # ping 192.168.1.1 [root@FriendlyARM /]# ping 192.168.1.1 PING 192.168.1.1 (192.168.1.1): 56 data bytes 64 bytes from 192.168.1.1: seq=0 ttl=64 time=1047.273 ms 64 bytes from 192.168.1.1: seq=1 ttl=64 time=50.813 ms 64 bytes from 192.168.1.1: seq=2 ttl=64 time=4.332 ms 64 bytes from 192.168.1.1: seq=3 ttl=64 time=4.181 ms ^C --- 192.168.1.1 ping statistics --4 packets transmitted, 4 packets received, 0% packet loss round-trip min/avg/max = 4.181/276.649/1047.273 ms [root@FriendlyARM /]# 無線ネットワークを切断する # stop-wifi ホームページ:http://nissin-tech.com メール:[email protected] 77 株式会社日新テクニカ 第七章 開発環境の構築 7.1 仮想マシンで ubuntu をインストールする Linux のビルドには Linux 環境が必要です。異なる OS を走らせるには普通は 2 台のパソコ ンが必要です。しかし仮想マシンを用意すれば 1 台のパソコンで二つの OS を走らせること もできます。 仮想マシンを実現するソフトウェアとして、無償で使える VMware Player を使ってみます。 VMware Player を下記 URL からダウンロードします。 http://www.vmware.com/jp/download/player/ Download のアイコンをクリックすると、ユーザ登録画面が表示されます。必要な事項を入 力して画面を進めてください。ダウンロード画面で VMware Player 3.1 for Windows をダウン ロードします。ダウンロードしたファイルは実行形式になっているので、そのまま実行を 開始してインストールしてください。基本的には「次へ」をクリックしていくだけです。 ホームページ:http://nissin-tech.com メール:[email protected] 78 株式会社日新テクニカ 日新テクニカ VMware Player を起動させて、「新規仮想マシンの作成」を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 79 株式会社日新テクニカ 日新テクニカ 「参照」ボタンで Ubuntu の CD イメージファイル iso を選択します。 「次へ」を押します。 日新テクニカ ユーザー名とパスワードを入力し、 「次へ」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 80 株式会社日新テクニカ 日新テクニカ 「次へ」を押します。 日新テクニカ ディスクサイズの指定、例は 100GB ですが、40GB またはデフォルトの 20GB でも大丈夫 です。「次へ」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 81 株式会社日新テクニカ 日新テクニカ 「ハードウェアをカスタマイズ」ボタンで仮想マシンをカスタマイズします。 ホームページ:http://nissin-tech.com メール:[email protected] 82 株式会社日新テクニカ 日新テクニカ 例はメモリを 1GB に設定しますが、デフォルトの 512MB でも大丈夫です。 ホームページ:http://nissin-tech.com メール:[email protected] 83 株式会社日新テクニカ 日新テクニカ ネットワークはブリッジに設定します。「OK」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 84 株式会社日新テクニカ 日新テクニカ 「完了」ボタンで ubuntu をインストール開始します。 ホームページ:http://nissin-tech.com メール:[email protected] 85 株式会社日新テクニカ 日新テクニカ Ubuntu がインストール中の様子。 ホームページ:http://nissin-tech.com メール:[email protected] 86 株式会社日新テクニカ 日新テクニカ インストール完了すると、自動的に ubuntu が起動されます。 初め起動の時、電源を切って、Windows との共有フォルダを設定します。Ubuntu と Windows の間にファイルを共有する。 ホームページ:http://nissin-tech.com メール:[email protected] 87 株式会社日新テクニカ 日新テクニカ VMware Player を再起動させ、ubuntu の「仮想マシン設定の編集」を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 88 株式会社日新テクニカ 日新テクニカ 「オプション」タブで共有フォルダを「常に有効」に設定し、「追加」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 89 株式会社日新テクニカ 日新テクニカ 「次へ」ボタンを押します。 日新テクニカ 「参照」ボタンで Windows との共有フォルダを設定します。「次へ」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 90 株式会社日新テクニカ 日新テクニカ 「完了」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 91 株式会社日新テクニカ 日新テクニカ 「OK」ボタンを押して、Ubuntu を再起動させます。 Ubuntu 環境で共有フォルダが見えます。 $ ls /mnt/hgfs Linux コマンドについて少し細く説明します。正式には、市販の書籍を参考にして下さ い。 ls .... ファイル一覧を表示します。 sudo .... 指定したユーザーでコマンドを実行します。 デフォルト(標準)では、root 権限です。 apt-get update .... 全パッケージのアップデートです gedit .... Gnome のスクリーンエディタです。 tar .... 圧縮されたファイルを解凍するコマンドです。 cp .... ファイルをコピーします。 ホームページ:http://nissin-tech.com メール:[email protected] 92 株式会社日新テクニカ 解凍の一般手順: 1.解凍したいファイル(*.bz2, *.gz など)を共有フォルダにコピーします。 2.*.bz2 の場合は tar jxvf /mnt/hgfs/共有フォルダ/*.bz2 3.*.gz の場合は tar zxvf /mnt/hgfs/共有フォルダ/*.gz ※ 次の解説には解凍したいファイルのフォルダ名を省略しました。ご注意く ださい。 7.2 クロスコンパイルツールをインストールする Ubuntu 環境で $ sudo tar zxvf arm-linux-gcc-4.3.2.tgz -C / .bashrc ファイルを編集し、 $ gedit ~/.bashrc 次の行を添加します。 export PATH=$PATH:/usr/local/arm/4.3.2/bin 次のような様子です。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 93 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 94 株式会社日新テクニカ Terminal を再起動させます。次のコマンド: $ arm-linux-gcc -v 日新テクニカ このような画面なら、クロスコンパイルツールをインストール成功しました。 7.3 Linux のコンパイル 7.3.1 Linux 用のブートローダ Linux 用のブートローダのソースを解凍します。 $ tar zxvf vboot-src-20100106.tar.gz ディレクトリを入ります。 $ cd vboot コンパイル開始 $ make 完了すると、ブートロード vboot.bin を生成されます。 7.3.2 Linux のカーネル Linux カーネルのソースを解凍します。 ホームページ:http://nissin-tech.com メール:[email protected] 95 株式会社日新テクニカ $ tar zxvf linux-2.6.32.2-mini2440-20100805.tar.gz カーネルのディレクトリを入ります。 $ cd linux-2.6.32.2 カーネルのコンフィグ $ cp config_mini2440_T35 .config config_mini6410_T35 はすでにコンフィグされたファイルです。 T35 は 3.5 インチ用のコンフィグファイルです。A70 は 7 インチ用の コンフィグファイルです。 コンパイル開始 $ make zImage 完了すると、arch/arm/boot に Linux カーネルのイメージファイル zImage を生成されま す。 7.3.3 ファイルシステム ファイルシステムを解凍します(root 権限が必要)。 $ sudo tar root_qtopia-20100805.tar.gz ファイルシステムのイメージファイルを生成するツール $ tar zxvf mkyaffs2image.tgz usr/sbin には yaffs2 イメージの生成ツールを展開されます。 mkyaffs2image: 64MB NAND を実装したボード用 mkyaffs2image-128M: 128MB 以上 NAND を実装したボード用 yaffs2 イメージを生成する $ sudo usr/sbin/mkyaffs2image rootfs_qtopia rootfs_qtopia-64M.img $ sudo usr/sbin/mkyaffs2image-128M rootfs_qtopia rootfs_qtopia-128M.img 7.3.4 busybox busybox のソースを解凍します。 $ tar zxvf busybox-1.13.3-mini2440.tgz busybox のディレクトリを入ります。 $ cd busybox-1.13.3 コンフィグする。 $ cp fa.config .config ※ fa.config ファイルはすでに作られたコンフィグファイルです。 コンパイル開始 ホームページ:http://nissin-tech.com メール:[email protected] 96 株式会社日新テクニカ $ make 完了すると、busybox を生成されます。 7.3.5 GUI システム qtopia GUI システム qtopia のソースを解凍します。 $ tar zxvf arm-qtopia-20100108.tar.gz arm-qtopia のディレクトリを入ります。 $ cd arm-qtopia コンパイル開始、約 30 分がかかります。 $ ./build-all イメージファイルを生成 $ ./mktarget 最後、target-qtopia-konq.tgz というファイルを生成されます。このファイルをボードに ダウンロードし、ボードの/opt ディレクトリを削除し、次のコマンドで新/opt を生成しま す。 # tar zxvf target-qtopia-konq.tgz -C / ボードを再起動すれば、新 qt 画面が現れます。 英語の画面です。ボードの/etc/pointercal ファイルを削除すれば、起動のとき、タッチパ ネルを再補正します。 7.3.6 Linux の起動 logo Logo を生成するツールの解凍 $ tar zxvf logomaker.tgz ツールを実行させます ホームページ:http://nissin-tech.com メール:[email protected] 97 株式会社日新テクニカ $ usr/sbin/logomaker 日新テクニカ このツールは bmp,jpeg,png ピクチャを linux logo に変換します。 メニュー「File」Æ「Open a picture file…」で好きなピクチャを開きます。 メ ニ ュ ー 「 File 」 Æ 「 Convert the picture to a Linux Logo File 」 で 開 い た ピ ク チ ャ を linux_logo_clut224.ppm と い う フ ァ イ ル に 変 換 す る 。 こ の フ ァ イ ル を linux-2.6.32.2/drivers/video/logo の同名ファイルを取替えます。Linux のペンギン logo は 好きなピクチャに変換されます。 7.3.7 Linux アプリケーションのサンプル Linux サンプルのソースを解凍します。 $ tar zxvf examples-20100108.tar.gz これらのサンプルは Linux 環境の基礎サンプルです。これらのサンプルを参照して、自分 のアプリケーションを作れます。 ソースの後ろの数字はタイムスタンプです。DVD のファイルのタイ ムスタンプは異なるかもしれません。ご注意ください。 ホームページ:http://nissin-tech.com メール:[email protected] 98 株式会社日新テクニカ 7.4 NFS サーバを構築 ネットワーク・ファイルシステム(NFS)を使用すれば、ボードは大きなホストのハードディ スクを直接にアクセスできます。プログラムを開発するのは便利です。次は NFS サーバを 構築手順です。 (1) 必要なパッケージをインストールする $ sudo apt-get install nfs-kernel-server nfs-common portmap sysv-rc-conf (2) portmap のコンフィグ $ sudo dpkg-reconfigure portmap 「No」を選択してください。 (3) サービスをオンにする $ sudo sysv-rc-conf portmap on $ sudo sysv-rc-conf nfs-kernel-server on (4) NFS のコンフィグファイルを編集 $ sudo gedit /etc/exports 次の行を添加する /home/ubuntu/mini6410 *(rw,sync) ホームページ:http://nissin-tech.com メール:[email protected] 99 株式会社日新テクニカ 日新テクニカ /home/ubuntu/mini6410 は NFS の共有ディレクトリです。 「*」は誰でもアクセスできる。 「rw」は読み書きを許可する。 (4) NFS を再起動させる $ sudo /etc/init.d/portmap restart $ sudo /etc/init.d/nfs-kernel-server restart (5) NFS のテスト $ sudo mount 192.168.1.9:/home/ubuntu/mini6410 /mnt 「192.168.1.9」は NFS サーバの IP アドレスです。成功すれば、/mnt には NFS の共有デ ィレクトリ/home/ubuntu/mini6410 です。 7.5 NFS からブートする NFS サーバを構築した後、NFS でボードを起動できる。 Supervivi モードに ホームページ:http://nissin-tech.com メール:[email protected] 100 株式会社日新テクニカ 「q」キーで次の起動パラメータを入力してください Supervivi>param set linux_cmd_line "console=ttySAC0 root=/dev/nfs nfsroot=192.168.1.9:/home/ubuntu/mini6410 ip=192.168.1.230:192.168.1.9:192.168.1.1:255.255.255.0:mini6410:eth0:off" パラメータの説明: nfsroot は NFS サーバの IP アドレス。 /home/ubuntu/mini6410 は NFS の共有ディレクトリ。Linux のファイルシステムをす でにこのディレクトリに展開されました。ご確認ください。 192.168.1.230 はボードの IP アドレス。 192.168.1.9 は開発ホストの IP アドレス。一般的に NFS サーバと同じです。 192.168.1.1 はボードの Gateway です。 255.255.255.0 はサブネットワークのマスク。 mini6410 はボードの名前、自由的に書ける。 「boot」コマンドでボードを NFS からブートします。 ホームページ:http://nissin-tech.com メール:[email protected] 101 株式会社日新テクニカ 第八章 Linux 環境のアプリケーションを開発 8.1 Hello, World! Hello, World のソースコードは examples.tgz にあります。 #include <stdio.h> int main(void) { printf("hello, FriendlyARM!¥n"); } 8.2 Hello,World をコンパイル $ cd examples/hello $ arm-linux-gcc –o hello main.c 又は $ make 実行できるhelloを生成します。 8.3 Hello,World を ARM9 ボードで実行 生成された実行コードhelloをARM9ボードに入れて、ARM9のコンソールで実行し ます。 # ./hello hello, FriendlyARM! ARM9ボードに入れるのは幾つの方法があります。USB・SDメモリ、シリアルポート、FTP など。一番便利な方法はNFSです。ARM9ボードは直接にホスト側の実行ファイルを実行で きます。 8.4 ほかのサンプル examples.tgzに幾つのサンプルがあります。 adc-test ADCテスト buttons ボタンテスト c++ C++サンプル camtest CMOSイメージセンサーテスト comtest シリアルポートテスト ホームページ:http://nissin-tech.com メール:[email protected] 102 株式会社日新テクニカ hello i2c led-player leds math pthread pwm udptalk i2c EEPROMテスト pipeサンプル LED点灯 数学処理 スレッド PWMテスト UDP通信サンプル 8.5 Qt/Embedded GUI プログラムを作る サンプル hello をコンパイルします $ cd arm-qtopia/hello $ ./build コンパイル完了すれば、ディレクトリ arm-qtopia/qtopia-2.2.0-FriendlyARM/qtopia/bin に実 行ファイル hello を生成させます。実行ファイル hello と arm-qtopia/hello/hello.desktop を ARM9 ボードにダウンロードして、ARM9 の適当なディレクトリに移転します。 # chmod +x hello # mv hello /opt/Qtopia/bin # mv hello.desktop /opt/Qtopia/apps/Applications 再起動すれば、デスクトップで hello のアイコンが見えます。実行させると… ホームページ:http://nissin-tech.com メール:[email protected] 103 株式会社日新テクニカ 第九章 Linux カーネルを再構築 9.1 ドライバの場所 (1)DM9000 10/1000Mイーサネット Linux-2.6.32/drivers/net/dm9000.c (2)シリアルポート(三つのシリアルポート0,1,2,デバイス名/dev/ttySAC0,1,2) Linux-2.6.32/drivers/serial/s3c2440.c (3)リアルタイマーRTC Linux-2.6.32/drivers/rtc/rtc-s3c.c (4)LED Linux-2.6.32/drivers/char/mini2440_leds.c (5)ボタン Linux-2.6.32/drivers/char/mini2440_buttons.c (6)タッチパネル Linux-2.6.32/drivers/input/touchscreen/s3c2410_ts.c (7)yaffs2ファイルシステム Linux-2.6.32/fs/yaffs2 (8)USBマウス、キーボード Linux-2.6.32/drivers/usb/hid (9)SD/MMCメモリカード(最大32GB) Linux-2.6.32/drivers/mmc (10)Nand Flash Linux-2.6.32/drivers/mtd/nand (11)UDA1341オーディオ Linux-2.6.32/sound/soc/s3c24xx (12)LCD液晶 Linux-2.6.32/drivers/video/s3c2410fb.c (13)USBメモリ Linux-2.6.32/drivers/usb/storage (14)gspca類USBカメラ Linux-2.6.32/drivers/media/video/gspca (15)I2C-EEPROM inux-2.6.32/drivers/i2c (16)バックライト Linux-2.6.32/drivers/video/mini2440_backlight.c ホームページ:http://nissin-tech.com メール:[email protected] 104 株式会社日新テクニカ (17)PWMブザー Linux-2.6.32/drivers/char/mini2440_pwm.c (18)Watchdog Linux-2.6.32/drivers/watchdog/s3c2410_wdt.c (19)ADC Linux-2.6.32/drivers/char/mini2440_ad.c (20)CMOSイメージセンサー Linux-2.6.32/drivers/media/video/s3c2440camif.c (21)USB無線LAN Linux-2.6.32/drivers/net/wireless/rt2x00 (22)USB-RS232変換ケーブル Linux-2.6.32/drivers/usb/serial/pl2302.c (23)CDC ACM(ARM7TDMI/LPC2148通信) Linux-2.6.32/drivers/usb/class/ ホームページ:http://nissin-tech.com メール:[email protected] 105 株式会社日新テクニカ 9.2 Linux カーネルのコンフィグ $ cd linux-2.6.32 $ cp config_mini2440_t35 .configあるコンフィグファイルを選択します $ make menuconfig 日新テクニカ 初のコンフィグ画面です。 ホームページ:http://nissin-tech.com メール:[email protected] 106 株式会社日新テクニカ 9.2.1 LCD 液晶とバックライト 日新テクニカ 初の画面で「Device Drivers」を選択、 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 107 株式会社日新テクニカ 「Enter」キーで「Graphics support」に入ります。 日新テクニカ 「support for frame buffer devices」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 108 株式会社日新テクニカ まず、スペースキーで「Backlight support for FriendlyARM board」に<*>を入れます。 「LCD select」に入ります。 日新テクニカ 使う液晶によって、対応のドライバをを選択します。コンフィグ完了したら、「Exit」で 「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 109 株式会社日新テクニカ 9.2.2 タッチパネル 「Device Drivers」メニューの「Input device support」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 110 株式会社日新テクニカ 「Touchscreens」に入ります。 日新テクニカ 画面のように選択します。「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 111 株式会社日新テクニカ 9.2.3 USB マウスとキーボード 「Device Drivers」メニューの「HID Devices」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 112 株式会社日新テクニカ 画面のように選択して、 「Exit」で「Device Drivers」メニューに戻ります。 9.2.4 USB メモリ 「Device Drivers」メニューの「SCSI device support」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 113 株式会社日新テクニカ 日新テクニカ 画面のように選択して、 「Exit」で「Device Drivers」メニューに戻ります。 「Device Drivers」メニューの「USB support」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 114 株式会社日新テクニカ 日新テクニカ 「USB Mass Storage support」を選択して、 「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 115 株式会社日新テクニカ 9.2.5 汎用 USB カメラ 「Device Drivers」メニューの「Multimedia devices」に入ります。 日新テクニカ 「video capture adapters」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 116 株式会社日新テクニカ 日新テクニカ 「V4L USB devices」に入ります。 日新テクニカ 「USB Video Class (UVC)」を選択し、 「GSPCA based webcams」に入ります。GSPCAはある ホームページ:http://nissin-tech.com メール:[email protected] 117 株式会社日新テクニカ フランス人によって作られた汎用USBカメラドライバです。たくさん種類のUSBカメラをサ ポートしますが、USBカメラは微妙な差がありますので、アプリケーションは区別に処理し なければなりません。 日新テクニカ すべてのUSBカメラを選択して、「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 118 株式会社日新テクニカ 9.2.6 CMOS イメージセンサー(OV9650) 「Device Drivers」メニューの「Multimedia devices」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 119 株式会社日新テクニカ 「OV9650 on the S3C2440 driver」を選択して、 「Exit」で「Device Drivers」メニューに戻り ます。 ※ このドライバはV4L/V4L2ドライバではありません。普通なキャラク タ・ドライバです。 9.2.7 イーサネット メイン・メニューの「Networking support」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 120 株式会社日新テクニカ 日新テクニカ サブメニュー「Networking options」に入ります。 日新テクニカ TCP/IPプロトコルを選択して、「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 121 株式会社日新テクニカ 「Device Drivers」メニューの「Network device support」に入ります。 日新テクニカ 日新テクニカ 「Ethernet(10 or 100Mbit)」に入ります。 ホームページ:http://nissin-tech.com メール:[email protected] 122 株式会社日新テクニカ 日新テクニカ <*> Generic Media Independent Interface device support <*> DM9000 support 「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 123 株式会社日新テクニカ 9.2.8 USB 無線 LAN メイン・メニューの「Networking support」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 124 株式会社日新テクニカ 「wireless」に入ります。 日新テクニカ 画面のように「*」を選択して、「Exit」で「Device Drivers」メニューに戻ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 125 株式会社日新テクニカ 「Device Drivers」メニューの「Network device support」に入ります。 日新テクニカ 「Wireless LAN」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 126 株式会社日新テクニカ 日新テクニカ 「Ralink driver support」に入ります。 日新テクニカ 「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 127 株式会社日新テクニカ 9.2.9 オーディオ 「Device Drivers」メニューの「Sound ard support」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 128 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 129 株式会社日新テクニカ 日新テクニカ 「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 130 株式会社日新テクニカ 9.2.10 SD/MMC メモリカード 「Device Drivers」メニューの「MMC/SD/SDIO card support」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 131 株式会社日新テクニカ 画面のように「*」を選択して、「Exit」で「Device Drivers」メニューに戻ります。 9.2.11 Watchdog 「Device Drivers」メニューの「Watchdog Timer support」に入ります。 日新テクニカ 日新テクニカ 「S3C2410 Watchdog」を選択して、「Exit」で「Device Drivers」メニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 132 株式会社日新テクニカ 9.2.12 LED 「Device Drivers」メニューの「Character devices - - ->」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 133 株式会社日新テクニカ 9.2.13 ボタン 「Device Drivers」メニューの「Character devices - - ->」に入ります。 日新テクニカ 9.2.14 PWM ブザー 「Device Drivers」メニューの「Character devices - - ->」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 134 株式会社日新テクニカ 9.2.15 AD 「Device Drivers」メニューの「Character devices - - ->」に入ります。 日新テクニカ 9.2.16 シリアルポート 「Device Drivers」メニューの「Character devices - - ->」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 135 株式会社日新テクニカ 「serial driver」に入ります。 日新テクニカ 9.2.17 リアルタイマーRTC 「Device Drivers」メニュー, 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 136 株式会社日新テクニカ 「Real Time Clock」に入ります。 日新テクニカ 9.2.18 I2C - EEPROM 「Device Drivers」メニューの「I2C support」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 137 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 138 株式会社日新テクニカ 9.2.19 yaff2s ファイルシステム 「Device Drivers」メニューの「Memory Technology Device (MTD) support」に入りま す。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 139 株式会社日新テクニカ 画面のように「*」を選択します。 「NAND Device Support」を探して、入ります。 日新テクニカ 日新テクニカ 選択して、メインメニューに戻ります。メインメニューで「File systems」を探して、入りま ホームページ:http://nissin-tech.com メール:[email protected] 140 株式会社日新テクニカ す。 日新テクニカ 「Miscellaneous filesystems」に入ります。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 141 株式会社日新テクニカ 日新テクニカ 「YAFFS2 file system support」を選択します。「Exit」で「Device Drivers」メニューに戻り ます。 ホームページ:http://nissin-tech.com メール:[email protected] 142 株式会社日新テクニカ 9.2.20 EXT2/VFAT/ NFS ファイルシステム NFS: 「File systems」メニューのNetwork File Systemsに入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 143 株式会社日新テクニカ FAT: 「File systems」メニューの「DOS/FAT/NT Filesystems」に入ります。 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 144 株式会社日新テクニカ 9.2.21 ARM7TDMI/LPC2148 との通信 ARM9 は標準 OS に Linux を採用します。Linux には、信頼性が高いネットワークスタッ クが実装され、利用できます。従って、ネットワークに接続する信頼性の高い遠隔制御機 器が、容易に作成できる利点があります。Linux にも USB スタックが実装され、多種類の USB デバイスを利用できます。例えば、USB プリンター、USB 無線 LAN、USB メモリ、 SD カードなど。パソコンの Linux 上のアプリケーションが ARM9 上で利用できます。ゼ ロから開発せずに、例えば Web サーバーなどが組み込み用機器で利用できるわけで、これ は非常に大きな利点といえます。 Linux の便利さの反面、複雑、重い、反応速度が遅いです。反応速度は大体数十 ms ぐらい です。この反応速度は人間との会話に満足できますが、機械制御のリアルタイム性に足り ないかもしれません。 ARM7 シリーズはリアルタイム制御に向けのマイコンです。OS なしあるいは簡単な RTOS を搭載します。1us~1ms 以上の反応速度が実現できます。LPC2148 は NXP 社によって開 発された ARM7 シリーズのマイコンです。CPU の周波数 60MHz、512KB Flash、42KB RAM。14 チャネル 10 ビット AD、1 チャネル 10 ビット DA、6 チャネルの PWM。 その上、LPC2148 には USB ターゲットポートを持ちます。最大通信速度 12Mbps。LPC2148 は USB デバイスとして使えます。ARM9 は USB ハブを経由すれば、何台分の LPC2148 にも接続できます。システムは ARM9/MINI2440 と ARM7/LPC2148 を同時に採用すれば、 Linux の便利な機能と ARM7 のリアルタイム性を組み合わせ、高度複雑なアプリケーショ ンとリアルタイム制御が両立できるシステムを作れます。 弊社が販売している LPC2148 開発キットとモジュール ホームページ:http://nissin-tech.com メール:[email protected] 145 株式会社日新テクニカ A/D DI D/A インターフェース ボード …… DO ARM7/LPC2148 ARM7/LPC2148 …… USB ハブ USB ハブを経由す れば、何台分のイン ターフェースボー ドに接続できます。 ARM9/MINI2440 は USB-PC104(LPC2148)変換ボードで各社の PC104 モジュールへアク セスする様子。 「Device Drivers」メニューの「USB support」に入ります。 ホームページ:http://nissin-tech.com メール:[email protected] 146 株式会社日新テクニカ 日新テクニカ 「USB Modem(CDC ACM) support」を選択します。“Exit”&“Save”します。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 147 株式会社日新テクニカ 9.3 Linux ドライバの開発入門 Linuxなどの現代的なOSでは、デバイスに対する入出力はデバイスドライバを通じて行うの が常識です。Linuxは「特権モード」を使い、カーネルモードとユーザーモードを厳密に分 離しています。ユーザーモードからは、物理メモリアドレスやI/Oポートなどへのアクセス はできません。したがって、デバイスに対する入出力は、カーネルモードで動作するドラ イバを通じて行うしかないです。 ある例を通じて、カーネルモードで動作するドライバの設計を紹介します。 9.3.1 簡単なドライバのソースコード ソースコード:linux-2.6.32/drivers/char/mini2440_hello_module.c #include <linux/kernel.h> #include <linux/module.h> static int __init mini2440_hello_module_init(void) { printk("Hello, Mini2440 module is installed !¥n"); return 0; } static void __exit mini2440_hello_module_cleanup(void) { printk("Good-bye, Mini2440 module was removed!¥n"); } module_init(mini2440_hello_module_init); module_exit(mini2440_hello_module_cleanup); MODULE_LICENSE("GPL"); 9.3.2 コンフィグファイルを編集します linux-2.6.32/drivers/char/Kconfigを開きます。下の内容を添加します(実は、添加完了し ました、確認してみます)。 ホームページ:http://nissin-tech.com メール:[email protected] 148 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 149 株式会社日新テクニカ Linux-2.6.32でmake menuconfigを実行して、メニューDevice Drivers Æ Character devicesを選んで、 添加されたものが見えます。spaceキーで「M」を選択します。 9.3.3 Makefile を編集 linux-2.6.32/drivers/char/Makefile を開きます。下の内容を添加します(実は、添加完了しまし た、確認してみます)。 ホームページ:http://nissin-tech.com メール:[email protected] 150 株式会社日新テクニカ 9.3.4 ドライバをコンパイルします linux-2.6.32 で make modules を実行します。linux-2.6.29/drivers/char/でオブジェクトフ ァイル mini2440_hello_module.ko を生成させます。 9.3.5 ARM9 ボードでドライバをインストールします mini2440_hello_module.koをARM9にダウンロードロードします。 #insmod mini2440_hello_module.ko ドライバを削除します。 #rmmod mini2440_hello_module.ko 9.4 USB Bluethooth の使い方 9.4.1 Linux カーネルのコンフィグ $ cd linux-2.6.32 $ cp config_mini2440_t35 .config あるコンフィグファイルを選択します $ make menuconfig Bluetoothのドライバをほとんど選択してください。 ホームページ:http://nissin-tech.com メール:[email protected] 151 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 152 株式会社日新テクニカ Bluetoothドライバを含むカーネルを生成する。 $ make zImage ホームページ:http://nissin-tech.com メール:[email protected] 153 株式会社日新テクニカ 9.4.2 Bluez をコンパイルする Bluezが必要なパッケージ: expat-2.0.1.tar.gz dbus-1.4.0.tar.gz glib-2.22.5.tar.bz2 libusb-0.1.12.tar.gz bluez-4.82.tar.gzまたは bluez-lib-3.36.tar.gz, bluez-utils-3.36.tar.gzまたは bluez-lib-2.25.tar.gz, bluez-utils-2.25.tar.gz まずスーパーユーザになります。 $ sudo su 次はコンパイルの手順です。生成したファイルを/opt/libsに置きますが、自分で指定された ディレクトリでも大丈夫です。 1. xml処理用のパッケージをコンパイルする。次のdbus用です。 # tar zxvf expat-2.0.1.tar.gz # cd expat-2.0.1 # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC=arm-linux-gcc # make # make install 2. dbusのコンパイル # tar zxvf dbus-1.4.0.tar.gz # cd dbus-1.4.0 # echo ac_cv_have_abstract_sockets=yes>arm-linux.cache # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -I/opt/libs/include -L/opt/libs/lib" --cache-file=arm-linux.cache --with-x=no # make # make install 3. glibのコンパイル ホームページ:http://nissin-tech.com メール:[email protected] 154 株式会社日新テクニカ まず必要なツールをインストールします。 # apt-get install gettext # apt-get install libglib2.0-dev # tar jxvf glib-2.22.5.tar.bz2 # cd glib-2.22.5 # echo ac_cv_type_long_long=yes>arm-linux.cache # echo glib_cv_stack_grows=no>>arm-linux.cache # echo glib_cv_uscore=no>>arm-linux.cache # echo ac_cv_func_posix_getpwuid_r=yes>>arm-linux.cache # echo ac_cv_func_posix_getgrgid_r=yes>>arm-linux.cache # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -I/opt/libs/include -L/opt/libs/lib" --cache-file=arm-linux.cache # make # make install 4. libusbのコンパイル # tar zxvf libusb-0.1.12.tar.gz # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -I/opt/libs/include -L/opt/libs/lib" # make # make install 5. bluezのコンパイル 使うライブラリの設定: # export PKG_CONFIG_PATH=/opt/libs/lib/pkgconfig:$PKG_CONFIG_PATH # export LD_LIBRARY_PATH=/opt/libs/lib:$LD_LIBRARY_PATH 最新のBluez-4.82を使えば、 # tar zxvf bluez-4.82.tar.gz # cd bluez-4.82 # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -I/opt/libs/include -L/opt/libs/lib" ホームページ:http://nissin-tech.com メール:[email protected] 155 株式会社日新テクニカ # make # make install Bluez-3.36を使えば、 # tar zxvf bluez-lib-3.36.tar.gz # cd bluez-lib-3.36 # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC=arm-linux-gcc # make # make install # tar zxvf bluez-utils-3.36.tar.gz # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -I/opt/libs/include -L/opt/libs/lib" # make # make install Bluez-2.25を使えば、 # tar zxvf bluez-lib-2.25.tar.gz # cd bluez-lib-2.25 # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -DUSHRT_MAX=0xffff -DUCHAR_MAX=0xff" # make # make install # tar zxvf bluez-utils-2.25.tar.gz # ./configure --prefix=/opt/libs --host=arm-linux --target=arm-linux CC="arm-linux-gcc -I/opt/libs/include -L/opt/libs/lib -DPATH_MAX=4096 -DUSHRT_MAX=0xffff" # make # make install 最後、/opt/libsにはBluezを生成されました。 # ls /opt/libs bin etc include lib libexec ホームページ:http://nissin-tech.com man sbin share var メール:[email protected] 156 株式会社日新テクニカ ディレクトリbin, etc, lib, sbinの中のファイルとサブディレクトリをボードのファイルシ ステムの対応ディレクトリにコピーしてください。bluez-4.82-bin.tgz, bluez-3.36-bin.tgz, bluez-2.25-bin.tgzは既に生成された直接利用可のBluezです。 9.4.3 Bluetooth の動作確認 生成されたBluetooth用のカーネルとファイルシステムをボードに書き込んでください。ボー ドを起動させます。 市販のBluetooth USBアダプタを接続する風景 下のコマンドはBluez-4.x, Bluez-3.x, Bluez-2.xが共通です。 市販のBluetooth USBアダプタをボードのUSBホストに挿入すると: Please press Enter to activate this console. usb 1-1: new full speed USB device using s3c2410-ohci and address 2 usb 1-1: New USB device found, idVendor=0a12, idProduct=0001 usb 1-1: New USB device strings: Mfr=0, Product=0, SerialNumber=0 usb 1-1: configuration #1 chosen from 1 choice ホームページ:http://nissin-tech.com メール:[email protected] 157 株式会社日新テクニカ 下記の通り、Bluetooth デバイスが認識されています。状態は DOWN です。 [root@FriendlyARM /]# hciconfig hci0: Type: BR/EDR Bus: USB BD Address: 00:00:00:00:00:00 ACL MTU: 0:0 SCO MTU: 0:0 DOWN RX bytes:0 acl:0 sco:0 events:0 errors:0 TX bytes:0 acl:0 sco:0 commands:0 errors:0 hci0 を起動すると、状態が UP RUNNING になり、BD Address が取得されます。 [root@FriendlyARM /]# hciconfig hci0 up [root@FriendlyARM /]# hciconfig hci0: Type: BR/EDR Bus: USB BD Address: 00:1F:81:00:02:50 ACL MTU: 1021:4 SCO MTU: 180:1 UP RUNNING RX bytes:348 acl:0 sco:0 events:11 errors:0 TX bytes:38 acl:0 sco:0 commands:11 errors:0 Bluetooth デバイスをスキャンしてみると、下記のように周りのBluetoothデバイスが見つか ります。 [root@FriendlyARM /]# hcitool scan Scanning ... 00:1C:EE:2F:CD:D0 812SH Bluetoothデバイスにl2pingを実行し、下記のとおり応答が返ることを確認。 [root@FriendlyARM /]# l2ping -c 4 00:1C:EE:2F:CD:D0 Ping: 00:1C:EE:2F:CD:D0 from 00:1F:81:00:02:50 (data size 44) ... 44 bytes from 00:1C:EE:2F:CD:D0 id 0 time 37.79ms 44 bytes from 00:1C:EE:2F:CD:D0 id 1 time 20.10ms 44 bytes from 00:1C:EE:2F:CD:D0 id 2 time 23.08ms 44 bytes from 00:1C:EE:2F:CD:D0 id 3 time 20.13ms 4 sent, 4 received, 0% loss Bluetoothデバイスにサービスを問い合わせてみます。 [root@FriendlyARM /]# sdptool browse 00:1C:EE:2F:CD:D0 ホームページ:http://nissin-tech.com メール:[email protected] 158 株式会社日新テクニカ Browsing 00:1C:EE:2F:CD:D0 ... Service Description: 812SH Service RecHandle: 0x10000 Service Class ID List: "PnP Information" (0x1200) Service Name: Dial-up Networking Service RecHandle: 0x10001 Service Class ID List: "Dialup Networking" (0x1103) "Generic Networking" (0x1201) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 1 Profile Descriptor List: "Dialup Networking" (0x1103) Version: 0x0100 Service Name: HS Voice Gateway Service RecHandle: 0x10003 Service Class ID List: "Headset Audio Gateway" (0x1112) "Generic Audio" (0x1203) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 3 Profile Descriptor List: "Headset" (0x1108) Version: 0x0100 Service Name: HF Voice Gateway Service RecHandle: 0x10004 Service Class ID List: "Handsfree Audio Gateway" (0x111f) ホームページ:http://nissin-tech.com メール:[email protected] 159 株式会社日新テクニカ "Generic Audio" (0x1203) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 4 Profile Descriptor List: "Handsfree" (0x111e) Version: 0x0101 Service Name: OBEX Object Push Service RecHandle: 0x10005 Service Class ID List: "OBEX Object Push" (0x1105) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 5 "OBEX" (0x0008) Profile Descriptor List: "OBEX Object Push" (0x1105) Version: 0x0100 Service Name: OBEX File Transfer Service RecHandle: 0x10006 Service Class ID List: "OBEX File Transfer" (0x1106) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 6 "OBEX" (0x0008) Profile Descriptor List: "OBEX File Transfer" (0x1106) Version: 0x0100 ホームページ:http://nissin-tech.com メール:[email protected] 160 株式会社日新テクニカ 第十章 生成されたファイルを書き込む 10.1 NOR Flash から起動 ARM9 ボードのモードを Nor Flash に設定して、電源を入れて、ARM9 ボードは Nor Flash から起動します。 5V 電源 USB シリア ル ポ ー ト (CP2102) Open: NAND モード Close: Nor モード ダウンロード用の USB ケーブル 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 161 株式会社日新テクニカ 10.2 USB ドライバのインストール 開発された OS とプログラムを USB 通じて mini2240 にダウンロードします。その為、USB ケーブルで mini2240 の USB スレーブポートとパ ソコンの USB ポートを接続することが 必要です。接続すると、パソコンは新しいデバイスを発見して、USB ドライバをインスト ールします。 ホームページ:http://nissin-tech.com メール:[email protected] 162 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 163 株式会社日新テクニカ USB ドライバをインストール完了あと、パソコンのダウンロード・ツール DNW.exe を実 ホームページ:http://nissin-tech.com メール:[email protected] 164 株式会社日新テクニカ 行して、mini2440 とパソコンを繋ぐことが確認できます。 OK なら USB 接続 成功しました。 ※ USBドライバにはバッグがあります。ARM9ボードが再起動、又は リセットの時、ホスト側は死んだかもしれません。その原因で、 ARM9ボードが起動完了した後、USBケーブルでホストを接続した ほうがいいです。 10.3 NAND Flash のパーティション メニューの中で、機能号[x]を選択して、NAND Flash のパーティション画面が出てきます。 ※ NAND Flash の中にバッドブロックがあるかもしれません。使用の 影響がありません。 ホームページ:http://nissin-tech.com メール:[email protected] 165 株式会社日新テクニカ 10.4 ブートロードの書き込み メニューの中で、機能号[v]を選択して、 日新テクニカ DNW のメニュー「USB Port」Æ「Transmit/Restore」を選択して、 128MB 以上 NAND を実装したボードはブートロード supervivi-128M を選択して、 「開く」 を押します。64MB NAND を実装したボードなら、supervivi-64M を選択してください。 ※ Kane BeBe III ARM9/2440 にはユーザーボタンがないので、 「vboot.bin」を選択したほうがいいです。 ホームページ:http://nissin-tech.com メール:[email protected] 166 株式会社日新テクニカ 日新テクニカ ブートロードを書き込み完了すると、自動的にメニューに戻ります。 vboot.bin も使えます。 10.5 Linux のカーネルの書き込み a. メニューの中で、機能号[k]を選択して、 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 167 株式会社日新テクニカ カーネルをダウンロードすることを待っています。 b. DNW のメニュー "USB Port Æ Transmit" を選択して、 Linux カーネルファイル zImage_XXX を選択して、「開く」を押します。 日新テクニカ zImage_A70 7 インチ液晶用のカーネル zImage_T35 3.5 インチ液晶用のカーネル zImage_N35 3.5 インチ液晶用のカーネル zImage_VGA1024X768 VGA 用のカーネル c. 転送完了したら、自動的にメニューに戻ります。 ホームページ:http://nissin-tech.com メール:[email protected] 168 株式会社日新テクニカ 10.6 ルート・ファイルシステムの書き込み a. メニューの中で、機能号[y]を選択して、 日新テクニカ b. DNW のメニュー"USB Port Æ Transmit"を選択して、ルート・ファイルシステム root_qtopia-128MB.img を選択して、 「開く」を押します。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 169 株式会社日新テクニカ 64MB NAND を実装したボードなら、root_qtopia-64M.img を選択してください。 c. 転送完了したら、自動的にメニューに戻ります。 電源を切って、起動モードを NAND Flash に設定して、再び電源を入れて、 NAND Flash に書き込んだ Linux が起動できるはずです。 10.7 NAND Flash のバックアップ ※ 新ブートロード supervivi のみ メニューの中で、機能号[u]を選択して、 日新テクニカ DNW のメニュー「Usb Port」Æ「Backup NandFlash to File」を選択します。 バックアップのファイルの名前「backup.bin」を入力して ホームページ:http://nissin-tech.com メール:[email protected] 170 株式会社日新テクニカ バックアップ完了したら、次の画面: ホームページ:http://nissin-tech.com メール:[email protected] 171 株式会社日新テクニカ 10.8 NAND Flash のリストア ※ 新ブートロード supervivi のみ メニューの中で、機能号[r]を選択して、 日新テクニカ DNW のメニュー「Usb Port」Æ「Transmit/Restore」を選択します。 バックアップされたファイル「backup.bin」を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 172 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 173 株式会社日新テクニカ 第十一章 NOR Flash のブートロードを更新 ※ 一般的に NOR Flash のブートロードを更新することが必要ないです。 11.1 H-JTAGで書き込み NOR FlashはH-JTAGというツールで更新します。 H-JTAGはARMの為のJTAGエミュレータです。AXD又はkeilをサポートします。デバッグの スピードも速いです。詳しい情報はこちらです。 http://www.hjtag.com 弊社はH-JTAGのハードウェアを提供しております。 11.1.1 H-JTAG をダウンロードとインストールします ホームページhttp://www.hjtag.comから最新版をダウンロードできます。 H-JTAGの特性: a. RDI 1.5.0 & 1.5.1 をサポートします; b. ARM7 & ARM9(ARM9E-SとARM9EJ-Sを含む); c. thumb & arm 命令; d. little-endian & big-endian; e. semihosting; f. 実行環境WINDOWS 9.X/NT/2000/XP; g. flashの書き込み 弊社は H-JTAG 用の簡易 LPT-JTAG を提供しております。パソコンには LTP が必要です。 LPT がなければ、USB 型 HJTAG をご利用ください。 ホームページ:http://nissin-tech.com メール:[email protected] 174 株式会社日新テクニカ 弊社が販売している USB HJTAG インストール完了すれば、デスクトップで H-JTAG と H-Flasher を生成します。H-JTAG を 実行すると、このエラーメッセージが出てきます。 ※ USB 型 HJTAG は LPT 関連の設定がありません。 設定しないから。"Ok"ボタンを押すと、初の画面が出てきます。 ホームページ:http://nissin-tech.com メール:[email protected] 175 株式会社日新テクニカ H-JTAG のメニュー:Setting Æ Jtag Settings この様な設定して、"Ok"ボタンを押します。 H-JTAG のメニュー:Script Æ Init Script "Load"ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 176 株式会社日新テクニカ FriendlyARM2440.his というファイルを選択します。 次の画面が出てきます。 "Ok"ボタンを押します。ご注意:"Enable Auto Init"をチェックしない。 パソコンと ARM9 ボードを H-JTAG で繋ぎます。ARM9 ボードの電源を入れます。 H-JTAG のメニュー:Operations Æ Detect Target を選択すると ホームページ:http://nissin-tech.com メール:[email protected] 177 株式会社日新テクニカ H-JTAG はターゲット ARM ボードを認識しました。 11.1.2 NOR Flash を書き込む ※ ARM9 ボードが NOR Flash モードのを確認してください。 H-JTAG のメニュー「Flasher」Æ「Start H-Flasher」で H-Flasher を実行します。 ホームページ:http://nissin-tech.com メール:[email protected] 178 株式会社日新テクニカ H-Flasherのメインメニュー「Load」、H-Flasher_mini2440.hfcというファイルを開 きます。 H-Flasherの左側の「4 Programming」を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 179 株式会社日新テクニカ 「Check」ボタンを押すと、mini2440が使用したNor Flash(AM29LV160DB)を発見 します。 ホームページ:http://nissin-tech.com メール:[email protected] 180 株式会社日新テクニカ 「Type」の「Plain Binary Format」を選択します。 書き込みのファイルsuperviviを選択します。「Dst Addr」で0を入力します。「Program」ボ タンを押すと、Nor Flashに書き込みます。 ホームページ:http://nissin-tech.com メール:[email protected] 181 株式会社日新テクニカ 書き込み完了の画面: ※ USB型HJTAGはLPT型よりとても速いです。約7秒未満書き込み完了できます。 ホームページ:http://nissin-tech.com メール:[email protected] 182 株式会社日新テクニカ 11.2 USB Open-Linkで書き込み • JTAG/ICE 高速 USB2.0 インターフェースの JTAG • 全ての ARM(ARM7, ARM9, Cortex-M3, XSCALE)マイコンをデバッグ • ARM 標準 2X10 ピン JTAG コネクタと 2X5 ピン JTAG コネクタ使用 • 電圧 1.2~5V DC で動作している ARM ターゲットをサポート • 最高 JTAG 速度 12MHz • ダウンロード速度 ARM7:600KB/s, ARM9:550KB/s, DCC:800KB/s • 三つの JTAG ケーブル付け(10 ピン, 20 ピン, 20 ピン 2mm-2.54mm 変換 • ARM シリーズ Flash の書き込み • RDI インターフェース、IAR,ADS,KEIL,WINARM,RealView などの開発環境で 使えます。 • OpenOCD(オーペンソース)デバッグも使用可能 USB Open Link の最新ドライバとソフトをこちらからダウンロードしてください。 http://www.segger.com/cms/jlink-software.html ホームページ:http://nissin-tech.com メール:[email protected] 183 株式会社日新テクニカ 「J-Flash ARM」というツールを開きます。メニュー「File」Æ「Open project」でプロジェ クトファイル「mini2440-SST39VF1601.jflash」を開きます。 ホームページ:http://nissin-tech.com メール:[email protected] 184 株式会社日新テクニカ 開いた後の様子 メニュー「File」Æ「Open data file」で書 き込みファイルを選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 185 株式会社日新テクニカ メニュー「Target」Æ「Auto」で書き込 み開始します。 ホームページ:http://nissin-tech.com メール:[email protected] 186 株式会社日新テクニカ ファームウェアのアップデートの画面があれば、「はい」ボタンを押します。 書き込み中… 書き込み完了 ※ USB Open-Linkの書き込み速度も速いです。 ホームページ:http://nissin-tech.com メール:[email protected] 187 株式会社日新テクニカ 11.3 Open-JTAG で書き込み 弊社が販売している Open-JTAG は ARM 用 の USB-JTAG エミュレータです。ARM7、 ARM9 、 Cortex-M3, XSCALE に 対 応 、 OpenOCD をサポートします。USB-RS232 機能もあります。COM と LPT ポートがない ノートパソコンに最適。 open-jtag.zip ファイルは関連ドライバとソ フトウェアです。 Opne-JTAGで書き込み様子 ホームページ:http://nissin-tech.com メール:[email protected] 188 株式会社日新テクニカ 11.3.1 ドライバをインストールする OpenJTAG をパソコンの USB ポートに挿入して、下の通りにドライバをインストールし てください。 ホームページ:http://nissin-tech.com メール:[email protected] 189 株式会社日新テクニカ USB ドライバのインストールは3回があります。インストール完了すると、デバイスマネ ージャで三つのデバイスが見えます。 ホームページ:http://nissin-tech.com メール:[email protected] 190 株式会社日新テクニカ ※ OpenJTAG は USB シリアルポートとして使えます。 11.3.2 書き込み C:¥openJTAG¥open-jtag>sjf24x0_ft2232.exe supervivi_mini2440 +---------------------------------------------------------+ | Flash Programmer for OpenJTAG of www.100ask.net | | OpenJTAG is a USB to JTAG & RS232 tool based FT2232 | | This programmer supports both of S3C2410X & S3C2440 | Author: Email/MSN([email protected]), QQ(17653039) | | +---------------------------------------------------------+ Usage: sjf24x0_ft2232.exe [filename] Select the CPU: 1. S3C2410X 2. S3C2440X Enter the number: 2 ホームページ:http://nissin-tech.com メール:[email protected] 191 株式会社日新テクニカ S3C24X0 detected, cpuID = 0x0032409d [Main Menu] 0:Nand Flash prog 1:Nor Flash prog 2:Memory Rd/Wr 3:Exit Select the function to test:1 Detect Nor Flash ... SST 39VF1601 Size: 2 MB Image Size: 0x1f314 ~略~ Erasing ................................ done write ... 100%done ※ Open-JTAGで書き込み時間が長い、ご了承ください。 ホームページ:http://nissin-tech.com メール:[email protected] 192 株式会社日新テクニカ 第十二章 Web カメラストリーミング配信 12.1 MJPG-streamerのダウンロードとコンパイル mjpg-streamerの最新バージョンをダウンロードします。 $ svn co https://mjpg-streamer.svn.sourceforge.net/svnroot/mjpg-streamer mjpg-streamer $ cd mjpg-streamer/mjpg-streamer $ make CC=arm-linux-gcc 成功すれば実行ファイルmjpg_streamerとライブラリ・ファイル*.soを生成します。 12.2 MJPG-streamer を mini/micro2440 ボードにインストール 生成されたファイル(mjpg_streamer、*.so)とmjpg-streamerのwwwディレクトリを mini/micro2440ボードにダウンロードして、特定なディレクトリにをコピーしてください。 # mkdir -p /usr/lib/ # cp *.so /usr/lib/ # cp mjpg_streamer /usr/bin/ # mv www /www/uvc-www 弊社が販売している UVC(USB Device Class)に対応した Web カメラを mini/micro2440 の USB ホストに接続して、 mini/micro2440 のコンソールで次のコマ ンドで MJPG-streamer を起動させます。 # mjpg_streamer --input "input_uvc.so --device /dev/video0 --fps 5 --resolution 640x480 --yuv" --output "output_http.so --port 8080 --www /www/uvc-www" MJPG Streamer Version.: 2.0 i: Using V4L2 device.: /dev/video0 i: Desired Resolution: 640 x 480 i: Frames Per Second.: 5 i: Format............: YUV ホームページ:http://nissin-tech.com メール:[email protected] 193 株式会社日新テクニカ i: JPEG Quality......: 80 format asked unavailable get width 352 height 288 o: www-folder-path...: /www/uvc-www/ o: HTTP TCP port.....: 8080 o: username:password.: disabled o: commands..........: enabled ※ UVC カメラによって、”--yuv”というパラメータは不要の可能性があるかもしれません ※ UVC 以外のカメラは input_gspcav1.so を使ってください。 12.3 Web ブラウザで Web カメラを見ましょう Web ブラウザで、「http://mini/micro2440 ボードの IP アドレス:8080/」にアクセスすると、 MJPG-Streamer Demo Pages が表示されます。静止画、動画、および Pan/Tilt/LED の On/Off 等の制御をすることができます。 (Internet Exploler 6 及び 7 では、MJPEG によるストリー ム(動画)を閲覧することができません。しかし、Javascript を使用したストリーム(動画)は、 Internet Explorer でも閲覧することができます。) Web ブラウザで見る様子: ホームページ:http://nissin-tech.com メール:[email protected] 194 株式会社日新テクニカ 第十三章 Eclipse + GCC + Open-JTAG 13.1 GCC ツールチェーン 各種ユーティリティ: http://www.yagarto.de/download/yagarto/yagarto-tools-20070303-setup.exe GCC ツールチェーン http://sourceforge.net/projects/yagarto/files/YAGARTO%20for%20Windows/yagarto-bu2.19.1_gcc-4.3.3-c-c%2B%2B_nl-1.17.0_gi-6.8.50_20090329.exe/download インストールが出来たら make の確認をするためコマンドプロンプトを起動し、右記のコ マンドを入力します(make --version)。画面に下記のメッセージが出てくればOKです。 ホームページ:http://nissin-tech.com メール:[email protected] 195 株式会社日新テクニカ サンプルのコンパイル: 1.コマンドプロンプトでディレクトリを移動 (cd¥leds) 2.下記のコマンドを入力します (make) コンパイル成功したら、*.bin ファイルを生成させます。 ホームページ:http://nissin-tech.com メール:[email protected] 196 株式会社日新テクニカ 13.2 Integrated Development Environment(Eclipse) JRE バージョン確認: 確認コマンド: java -version JRE がなければ、あるいは 1.4.2 以下なら、JRE のインストールが必要です。 http://java.sun.com/javase/downloads/index.jsp Eclipse のインストール: 1)下記のリンクをクリック http://www.eclipse.org/downloads/index.php 2)Eclipse IDE for C/C++ Debelopers(79MB)の Windows をクリック ホームページ:http://nissin-tech.com メール:[email protected] 197 株式会社日新テクニカ 3)画面の下矢印をクリックしダウンロード ホームページ:http://nissin-tech.com メール:[email protected] 198 株式会社日新テクニカ 4 ) ダ ウ ン ロ ー ド し た フ ァ イ ル "eclipse-cpp-galileo-win32.zip" を 解 凍 し 、 そ の な か の”eclipse"フォルダを適当な場所(C:¥eclipse)へ移動する。 5)Eclipse を起動する。 6)最初に Workspace の場所を聞いてきます。適当なフォルダに変更してください。 ホームページ:http://nissin-tech.com メール:[email protected] 199 株式会社日新テクニカ 画面の Workbench をクリックします。 ホームページ:http://nissin-tech.com メール:[email protected] 200 株式会社日新テクニカ 13.3 プロジェクトを作る 新規プロジェクトを作成するため"File"→"New"→"C Project"を選択します プロジェクト名を聞かれるので適当な名前(LED)を入力し Finish ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 201 株式会社日新テクニカ Project Explorer にプロジェクト LED が追加されましたが中身が何もないので、"×"がつい ています。 サンプル LEDs.zip のなかのファイルを"C:¥workspace¥LED"にコピーしてください。 Eclipse の”File"→"Refresh"を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 202 株式会社日新テクニカ Project Explorer の"LED"プロジェクトの左にある+をクリックするとファイルの一覧が 表示されます。 13.4 Eclipse プラグイン(Zylin Embedded CDT)インストール Eclipse の"Help"→"Install New Software"を選択します ホームページ:http://nissin-tech.com メール:[email protected] 203 株式会社日新テクニカ Add ボタンを押します。 Add Site の"Location"に"http://opensource.zylin.com/zylincdt "と入力し OK ボタンを押す。 ホームページ:http://nissin-tech.com メール:[email protected] 204 株式会社日新テクニカ Install に"http://opensource.zylin.com/zylincdt "が追加されるのでチェックボックスにク リックしチェックを入れて Next ボタンを押す。 ホームページ:http://nissin-tech.com メール:[email protected] 205 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 206 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 207 株式会社日新テクニカ インストール完了したら、Yes ボタンを押して、Eclipse を再起動させます。 13.5 ビルドの設定 Eclipse の"Project"→"Preferences"を選択する。 ホームページ:http://nissin-tech.com メール:[email protected] 208 株式会社日新テクニカ Preferences の"Build"を選択し"Scanner Configuration Builder"のチェックマークを外し て ホームページ:http://nissin-tech.com メール:[email protected] 209 株式会社日新テクニカ Preferences の "C/C++ Build"→"Settings" を 選 択 し "Binary Parsers" タ ブ の "GNU Elf Parser"にチェックを入れて OK ボタンを押します ホームページ:http://nissin-tech.com メール:[email protected] 210 株式会社日新テクニカ 13.6 ビルド Eclipse の"Project"→"Build Automatically"のチックを外してください。 "Project"→"Clean"を選択するクリアが行われます。 ホームページ:http://nissin-tech.com メール:[email protected] 211 株式会社日新テクニカ 「Start a build immediately」のチェックマークを外して、「Ok」を押します。 "Project"→"Build All"を選択するとビルドが行われます。 ホームページ:http://nissin-tech.com メール:[email protected] 212 株式会社日新テクニカ コンパイル中です。 コンパイルが成功すれば、実行ファイル led_elf.elf と leds.bin を生成されます。 13.7 GDB の設定 Eclipse の"Run"→"Debug Configurations..."を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 213 株式会社日新テクニカ Debug Configurations の"Zylin Enbedded debug(Native)"を右クリックし"New"を選択す る。 ホームページ:http://nissin-tech.com メール:[email protected] 214 株式会社日新テクニカ Name に適当な名前を入れる。例、"gdb"と入れます。Main タブの"Project"に"LED"、"C/C++ Appication:"に"C:¥workspace¥LED¥leds_elf"と入力します。 ホームページ:http://nissin-tech.com メール:[email protected] 215 株式会社日新テクニカ Debugger タブの"GDB debugger:"に"arm-elf-gdb"、"GDB command file:"に何も入力しま せん。 ホームページ:http://nissin-tech.com メール:[email protected] 216 株式会社日新テクニカ Commands タブの"'Initialize' commands"に下記の画面の様に入力します target remote localhost:3333 monitor halt //ボードの実行を停止させる monitor arm920t cp15 2 0 // MMU機能をクローズ monitor step //ステップで実行するように load //leds_elfをロード break main //「main」関数にブレークポイントを設定 continue //プログラムを実行させて、「main」にストップ ホームページ:http://nissin-tech.com メール:[email protected] 217 株式会社日新テクニカ Common タブの"Display in favorites menu"の Debug にチェックを入れます。全てを入力 し終えたら"Apply"ボタンを押し、"Close"ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 218 株式会社日新テクニカ 13.8 OpenOCD の設定 Eclipse の"Run"→"External Tools."→"External Tools Configrurations..."を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 219 株式会社日新テクニカ External Tools Configrurations の"Program"を右クリックし、"New"を選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 220 株式会社日新テクニカ Main タブの"Name"に適当な名前を入力してください。私は”OpenOCD"と入れました。 "Location:"に"C:¥Program Files¥OpenOCD¥0.1.0¥bin¥openocd.exe"、 "Working Directory:"に"C:¥openJTAG"、 "Arguments:"に-f "interface/open-jtag.cfg" -f "target/samsung_s3c2440.cfg" -c "arm7_9 fast_memory_access enable"と入力します。 ホームページ:http://nissin-tech.com メール:[email protected] 221 株式会社日新テクニカ Build タブをクリックし"Build before launch"にチェックを外れます。 ホームページ:http://nissin-tech.com メール:[email protected] 222 株式会社日新テクニカ Common タブをクリックし"Display in favarites menu"の"External Tools"にチェックを入 れます。全てを入力し終えたら"Apply"ボタンを押し、"Close"ボタンを押します。 13.9 デバッグ 電源投入 1. OpenJTAG をターゲット(MINI2440 ボード)とパソコンに接続 2. ターゲットに電源を入れます ホームページ:http://nissin-tech.com メール:[email protected] 223 株式会社日新テクニカ External Tools の▼ボタンをクリックし、OpenOCD を選択 Console ウインドに下記のメッセージが出力 Debug の▼ボタンをクリックし、"gdb"を選択。 ホームページ:http://nissin-tech.com メール:[email protected] 224 株式会社日新テクニカ Yes ボタンを押して、デバッグが開始します。 ホームページ:http://nissin-tech.com メール:[email protected] 225 株式会社日新テクニカ Eclipse に Debug 用のコマンドあるいはショットカット一覧 詳しくは Eclipse のドキュメントを参照 ステップ実行において良く使われる操作の一覧を以下に示します。 操作名 ショートカットキー 再開 F8 ステップイン F5 ステップオーバー F6 ステップ・リターン F7 ステップ実行とは関係ありませんが、前回起動したクラスを再度実行したデバッグする場合は、 以下のショートカットキーが便利です。 操作名 ショートカットキー 前回の起動を実行 Ctrl + F11 前回の起動をデバッグ F11 ブレークポイントでプログラムが中断した状態から、次のブレークポイントまで実行させ たり、1行ずつ実行させたりできます。コード「GPBDAT = (~(i<<5))」を繰り返して実行す ることにより、LEDランプが1つずつ点滅 ホームページ:http://nissin-tech.com メール:[email protected] 226 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 227 株式会社日新テクニカ Debug 途中の ARM9 ボードの様子の1(一番右の LED ランプが点灯) ホームページ:http://nissin-tech.com メール:[email protected] 228 株式会社日新テクニカ Debug 途中の ARM9 ボードの様子の2(右から 2 番目の LED ランプが点灯) 13.10 デバッグ終了 1)gdb の停止 Debug ウインドウの gdb の Thread を選択し、停止ボタンと押します ホームページ:http://nissin-tech.com メール:[email protected] 229 株式会社日新テクニカ 2)OpenOCD の停止 Debug ウインドウの OpenOCD の Thread を選択し、停止ボタンと押します 3)電源停止 ターゲットの電源を停止 4)OpenJTAG をターゲットから取り外す 5)上記が面倒であれば Eclipse を終了しターゲットの電源停止、open-JTAG を取り外し でも OK です。 ホームページ:http://nissin-tech.com メール:[email protected] 230 株式会社日新テクニカ 第十四章 Android-2.1 14.1 初体験 Android2.1 カーネルのイメージファイル: images/Android2.1/android2.1-armv4t_kernel_N35.bin images/Android2.1/android2.1-armv4t_kernel_T35.bin ※ 7 インチ液晶にまだ対応しておりません、ご了承ください。 Android2.1 ファイルシステムのイメージファイル: images/Android2.1/android2.1-armv4t-rootfs.img Linuxと同じ方法でこれらのイメージファイルをNANDに書き込んでください。 Android2.1が起動した直後の様子。Androidの起動時間が長い、ご注意ください。 このAndroidにはバッグがあります。一度スリープモードに入ると、戻れません、再起動し なければなりません。その為、Androidの液晶画面で「設定」Æ「アプリケーション」Æ「開 発」Æ「スリープモードにしない」に設定してください。 次は操作の図解です。 ボードには64MBメモリしかない、沢山のアプリケーションを実装すれば、とても遅いです。 ご了承ください。提供されたファイルシステムには多いアプリケーションがあるので、遅 いです。操作の時、我慢してください。 ホームページ:http://nissin-tech.com メール:[email protected] 231 株式会社日新テクニカ 日新テクニカ 起動直後の画面 ロックを解除した画面 日新テクニカ 沢山のアプリケーション があるので、遅いです。 ホームページ:http://nissin-tech.com 「設定」をタッチする メール:[email protected] 232 株式会社日新テクニカ 日新テクニカ 「アプリケーション」を探す 「アプリケーション」をタッチする 日新テクニカ 「開発」をタッチする ホームページ:http://nissin-tech.com 「スリープモードにしない」 をチックする メール:[email protected] 233 株式会社日新テクニカ 使わないアプリケーションを削除すれば、速くなります。Androidのsystem/appディレク トリには最小限の6個ファイル: LatinIME.apk Launcher.apk PackageInstaller.apk Settings.apk SettingsProvider.apk UserDictionaryProvider.apk を残って、自分のアプリケーションだけをインストールすれば、とても速いです。 ネットワークの設定のために、Androidのコンソールで次のコマンドを入力してください。 # rm /system/bin/ifconfig # rm /system/bin/route # cd /bin # ln -s busybox ifconfig # ln -s busybox route 液晶画面をキャプチャするコマンド: # snapshot -d /dev/graphics/fb0 picture.png ※ Androidの操作画面はこのコマンドで撮りました。 次のコマンドで/system/etc/shine/pointercalというファイルを削除すれば、再起動の時、 タッチパネルを再補正します。 # rm /system/etc/shine/pointercal 次のコマンドで DHCP 機能により IP アドレスを自動取得します。 # netcfg eth0 up # netcfg eth0 dhcp 自分も IP アドレスを指定できます。 # ifconfig eth0 192.168.1.230 「192.168.1.230」は指定された IP アドレスです。 ホームページ:http://nissin-tech.com メール:[email protected] 234 株式会社日新テクニカ 起動のとき、ネットワークを自動的に設定すれば、/system/etc/shine/net.confを編集して ください。 /system/etc/shine/net.conf の中身 NET=wlan0 #有線 LAN なら eth0 に変更してください IP=192.168.1.108 GW=192.168.1.1 DNS=192.168.1.1 Androidのコンソールのコマンドの使い方はLinuxと同じです。 ボードにはボタンがあれば、ボタンでAndroidも操作できます。 ボードのボタンとAndroidのボタンの対応関係 K6 Home K4 Menu K5 → K3 Volume- K2 OK K1 Volume+ 14.2 カーネルのコンパイル ソースの解凍する $ tar zxvf android2.1-armv4t_kernel.tar.gz 生成されたディレクトリに入る $ cd android2.1-armv4t_kernel 使っている液晶によってarch/arm/mach-s3c2440/mach-smdk2440.cというファイルを 編集する。 arch/arm/mach-s3c2440/mach-smdk2440.c の LCD 定義 #define LCD_WIDTH 240 #define LCD_HEIGHT 320 #define LCD_PIXCLOCK 170000 #define LCD_RIGHT_MARGIN 25 #define LCD_LEFT_MARGIN 0 #define LCD_HSYNC_LEN 4 #define LCD_UPPER_MARGIN 1 #define LCD_LOWER_MARGIN 4 ホームページ:http://nissin-tech.com #define LCD_VSYNC_LEN 1 メール:[email protected] 235 株式会社日新テクニカ ほかの液晶を使えばLinux-2.6.32.2/arch/arm/mach-s3c2440/mach-mini2440.cという ファイルをご参照ください。 必要なら、カーネルをコンフィグする $ make menuconfig コンパイルする $ make 完了すると、arch/arm/boot に Android カーネルのイメージファイル zImage を生成され ます。 14.3 ファイルシステムのイメージを生成 Android のファイルシステム Android2.1/android2.1-armv4t-rootfs.tar.gz ファイルの解凍 $ tar zxvf android2.1-armv4t-rootfs.tar.gz 必要なら、ディレクトリ android2.1-armv4t-rootfs/system/app または data/app 中のア プリケーション(*.apk)を添加・削除してください。 yaffs2 イメージファイルの生成 # mkyaffs2image-128M android2.1-armv4t-rootfs android2.1-armv4t-rootfs.img 生成されたAndroidのカーネルとファイルシステムをNANDに書き込んでください。 14.4 Android 開発環境の構築(Windows 編) 必要なソフトウェアは下記の通りになります。 1. 2. 3. 4. Android SDK Eclipse JRE Android Development tools プラグイン ホームページ:http://nissin-tech.com メール:[email protected] 236 株式会社日新テクニカ 14.4.1 Android SDK のインストール 次の URL からダウンロードします。 http://developer.android.com/sdk/index.html 日新テクニカ ダウンロードしたファイルを解凍します。例は「C:¥android-sdk-windows」に解凍されま す。次の手順で環境変数を設定します。 1. マイコンピュータを右クリックし「プロパティ」を選択し、「システムのプロパティ」 を開きます。 ホームページ:http://nissin-tech.com メール:[email protected] 237 株式会社日新テクニカ 「詳細設定」タブで「環境変数」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 238 株式会社日新テクニカ 2. 「システム環境変数」リストの「Path」をダブルクリックする 3. 「変数値」テキストボックスの末尾に「;C:¥android-sdk-windows¥tools」を追加する。 4. 「OK」を押して、それぞれのダイアログを閉じます。 14.4.2 Eclipse のインストール 次の URL からダウンロードします。 http://www.eclipse.org/downloads/ ホームページ:http://nissin-tech.com メール:[email protected] 239 株式会社日新テクニカ 日新テクニカ 日新テクニカ 解凍して、適当なフォルダに置きます。例は「C:¥eclipse」です。 14.4.3 JRE のインストール 次の URL からダウンロードします。 http://www.java.com/ja/download/windows_xpi.jsp?locale=ja&host=www.java.com ホームページ:http://nissin-tech.com メール:[email protected] 240 株式会社日新テクニカ Java をダウンロードして、実行してインストールします。 「インストール」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 241 株式会社日新テクニカ インストール中…… インストール完了、「閉じる」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 242 株式会社日新テクニカ 14.4.4 ADT プラグインのインストール 14.4.2 節でインストールした eclipse を起動させます。 「OK」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 243 株式会社日新テクニカ 「Workbench」アイコンに入ります。メニュー「help」Æ「Install New Software」を選 択します。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 244 株式会社日新テクニカ 日新テクニカ 「 Add」ボタンを押すと、新ダイアログが開く、 Name 欄にリモートサイトの名前 (例: Android Plugin)を入力します。URL 欄には「https://dl-ssl.google.com/android/eclipse」 を入力し、「OK」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 245 株式会社日新テクニカ 日新テクニカ 「Next」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 246 株式会社日新テクニカ 日新テクニカ 「Next」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 247 株式会社日新テクニカ 日新テクニカ 「I accept the terms of the license agreements」をチックし、 「Finish」ボタンを押します。 インストール中…… ホームページ:http://nissin-tech.com メール:[email protected] 248 株式会社日新テクニカ 「OK」ボタンを押します。 「Restart Now」ボタンで Eclipse を再起動させます。 14.4.5 アップデートと SDK 設定 「C:¥ android-sdk-windows」フォルダの SDK Manager.exe を実行させて、バージョ ンアップします。 日新テクニカ 「Accept」をチックし、 「Install」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 249 株式会社日新テクニカ 日新テクニカ バージョンアップ中…… 日新テクニカ バージョンアップ完了すると、「Close」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 250 株式会社日新テクニカ 日新テクニカ Eclipse を実行させて、メニュー「Window」Æ「Preferences」を選択します。 このダイアログがあれば、「Proceed」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 251 株式会社日新テクニカ 日新テクニカ 左側の「Android」を選択し、下のダイアログがあれば、「OK」ボタンを押します。 「Browse」ボタンで 8.1 節がインストールした SDK を選択し、 「OK」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 252 株式会社日新テクニカ 日新テクニカ 「Apply」ボタンを押して、 ホームページ:http://nissin-tech.com メール:[email protected] 253 株式会社日新テクニカ 日新テクニカ 「OK」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 254 株式会社日新テクニカ 14.4.6 仮想 Android デバイスの設定 メニュー「Window」Æ「Android SDK and AVD Manager」を選択します。 日新テクニカ 日新テクニカ 「New」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 255 株式会社日新テクニカ Name 欄に名前(例:idea6410)を入力します。Target 欄に Android 2.1-update1 – API Level 7 に設定します。「Create AVD」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 256 株式会社日新テクニカ 日新テクニカ 「idea6410」仮想 Android マシンを選択し、 「Start…」ボタンを押して仮想 Android を起 動させます。 「Launch」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 257 株式会社日新テクニカ 日新テクニカ 仮想マシンが起動中… 日新テクニカ Android を起動した様子 ホームページ:http://nissin-tech.com メール:[email protected] 258 株式会社日新テクニカ 14.4.7 Hello World プロジェクトの作成 日新テクニカ メニュー「New」Æ「Project」を選択する。 日新テクニカ ダイアログの「Android Project」を選択し、「Next」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 259 株式会社日新テクニカ 日新テクニカ 画面のような入力して、 「Finish」ボタンを押す。 ホームページ:http://nissin-tech.com メール:[email protected] 260 株式会社日新テクニカ 「AppDemo」というプロ ジェクトが生成されまし た。 「AppDemo」プロジェ クトに右クリックして、 「Properties」を選択しま す。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 261 株式会社日新テクニカ 日新テクニカ 左側の「Java Build Path」を選択し、 「Android 2.1-update1」をチックし、 「OK」ボタン を押します。 メ ニ ュ ー 「 Run 」 Æ 「 Run Last Launched 」を選択し ます。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 262 株式会社日新テクニカ 「Android Application」を選択し、「OK」ボタンを 押すと、仮想 Android デバイスが自動的に起動され ます。起動完了した後、「MENU」ボタンで「Hello World」を実行させます。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 263 株式会社日新テクニカ 14.4.8 プロジェクトのデバッグ 日新テクニカ Java ソースにブレークポイントを設定します。 日新テクニカ メニュー「Run」Æ「Run Configurations」を選択する。 ホームページ:http://nissin-tech.com メール:[email protected] 264 株式会社日新テクニカ 日新テクニカ 「Target」タブに「Android 2.1」の AVD をチックし、 「Apply」を押して、 「Debug」ボタ ンでデバッグ開始します。 日新テクニカ 「Yes」を押します。 ホームページ:http://nissin-tech.com メール:[email protected] 265 株式会社日新テクニカ 日新テクニカ ブレークポイントのところに止まります。 「F6」キーでステップデバッグします。 14.5 開発されたアプリ(apk)をボードにインストールする まず、開発されたアプリ(*.apk)ファイルをSDカードにコピーする。 このSDカードをボードに挿入する。 ボードのコンソールで次のコマンドでSDカードのファイルをリストする # ls /sdcard Apkファイルを/data/appディレクトリにコピーする # cp /sdcard/*.apk /data/app インストールしたApkファイルを削除する # rm /data/app/yourApp.apk ホームページ:http://nissin-tech.com メール:[email protected] 266 株式会社日新テクニカ Windows CE6.0 15.1 Windows CE6.0 の開発環境をインストールする 弊社は Windows CE6.0 の開発環境を提供しておりません。自分でマイクロソフ ト社の HP から体験版をダウンロードしてください。 Visual Studio 2005 http://download.microsoft.com/download/e/1/4/e1405d9e-47e3-404c-8b09-489437b27fb0/En_vs_20 05_Pro_90_Trial.img Visual Studio 2005 Service Pack 1(ファイル名:VS80sp1-KB926601-X86-ENU.exe) http://www.microsoft.com/downloads/details.aspx?familyid=bb4a75ab-e2d4-4c96-b39d-3 7baf6b5b1dc&displaylang=en Visual Studio 2005 Service Pack 1 Update for Windows Vista (ファイル名:VS80sp1-KB932232-X86-ENU.exe) http://www.microsoft.com/downloads/details.aspx?FamilyID=90E2942D-3AD1-4873-A2 EE-4ACC0AACE5B6&displaylang=en Visual Studio 2005 Service Pack 1 ATL Security Update (ファイル名:VS80sp1-KB971090-X86-INTL.exe) http://www.microsoft.com/downloads/details.aspx?familyid=7C8729DC-06A2-4538-A90 D-FF9464DC0197&displaylang=en Windows Embedded CE 6.0 http://www.microsoft.com/downloads/details.aspx?displaylang=en&FamilyID=7e286847 -6e06-4a0c-8cac-ca7d4c09cb56 Windows Embedded CE 6.0 Platform Builder Service Pack 1 http://www.microsoft.com/downloads/details.aspx?FamilyId=BF0DC0E3-8575-4860-A8 E3-290ADF242678&displaylang=en Windows Embedded CE 6.0 R2 http://www.microsoft.com/downloads/details.aspx?FamilyId=F41FC7C1-F0F4-4FD6-93 ホームページ:http://nissin-tech.com メール:[email protected] 267 株式会社日新テクニカ 66-B61E0AB59565&displaylang=en Windows Embedded CE 6.0 R3 http://www.microsoft.com/downloads/details.aspx?FamilyID=BC247D88-DDB6-4D4A-A 595-8EEE3556FE46&displaylang=ja&displaylang=en QQ(第三方のソフト) http://www.microsoft.com/downloads/details.aspx?FamilyID=527042f7-bb5b-4831-a6ad5081808824ec&displaylang=en WesttekFileViewers6.exe(office ファイルのヴュー,第三方のソフト) http://www.microsoft.com/downloads/details.aspx?FamilyID=d2fd14eb-7d5c-428b-951c343f910047c1&displaylang=en これらのパッケージをダウンロードし、順番でインストールしてください。 15.1.1 VS2005 のインストール ¥VS2005¥VSTS¥vs¥setup.exe を実行してください。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 268 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 269 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 270 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 271 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 272 株式会社日新テクニカ 15.1.2 VS2005 のパッチ VS80sp1-KB926601-X86-ENU.exe を実行してください。 日新テクニカ 日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 273 株式会社日新テクニカ 日新テクニカ 日新テクニカ 15.1.3 WinCE6.0 のインストール Windows Embedded CE 6.0¥setup.exe を実行してください。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 274 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 275 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 276 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 277 株式会社日新テクニカ 日新テクニカ 15.1.4 Windows Embedded CE 6.0 Platform Builder Service Pack 1 Windows Embedded CE 6.0 Platform Builder Service Pack 1.msi を実行してください。 ホームページ:http://nissin-tech.com メール:[email protected] 278 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 279 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 280 株式会社日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 281 株式会社日新テクニカ 15.1.5 WinCE6.0R2 のインストール WinCE6.0 R2¥setup.exe を実行してください。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 282 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 283 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 284 株式会社日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 285 株式会社日新テクニカ 15.1.6 WinCE6.0 のアップデート アップデートのパッケージを順番でインストールしてください。 WinCEPB60-061231-Product-Update-Rollup-Armv4I.msi WinCEPB60-071231-Product-Update-Rollup-Armv4I.msi WinCEPB60-081231-Product-Update-Rollup-Armv4I.msi WinCEPB60-090131-2009M01-Armv4I.msi WinCEPB60-090228-2009M02-Armv4I.msi WinCEPB60-090331-2009M03-Armv4I.msi WinCEPB60-090430-2009M04-Armv4I.msi WinCEPB60-090531-2009M05-Armv4I.msi WinCEPB60-090630-2009M06-Armv4I.msi WinCEPB60-090731-2009M07-Armv4I.msi WinCEPB60-090831-2009M08-Armv4I.msi 最新の Updates はこちらです。 http://www.microsoft.com/downloads/en/results.aspx?freetext=Windows+Embedded+CE +6.0+Monthly+Update&displaylang=en&stype=s_basic ホームページ:http://nissin-tech.com メール:[email protected] 286 株式会社日新テクニカ 15.1.7 WinCE6.0R3 のインストール CE6R3.iso ファイルを仮想 DVD ドライブにマウントしてください。仮想 DVD の Windows Embedded CE 6.0 R3.msi を実行します。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 287 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 288 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 289 株式会社日新テクニカ 15.2 mini2440 の BSP をインストールする DVD の WindowsCE6¥BSP.zip を解凍してください。 BSP のインストール: 1. BSP¥Mini2440 フォルダを C:¥WINCE600¥PLATFORM にコピーします。 2. project¥mini6410 フォルダを C:¥WINCE600¥OSDesigns にコピーします。 C:¥WINCE600¥PLATFORM¥Mini2440¥SRC¥INC¥options.h ファイルには使う液晶を設定しま す。 #define LCD_N43 //4.3 インチ液晶 //#define LCD_T35 //#define LCD_L80 //#define LCD_A70 //7 インチ液晶 //#define LCD_VGA1024768 15.3 ドライバの場所 (1) LED ドライバ ¥Mini2440¥SRC¥DRIVERS¥LEDdriver (2) キーボードのドライバ ¥Mini2440¥SRC¥DRIVERS¥Userkey (3)PWM ブザーのドライバ ¥Mini2440¥SRC¥DRIVERS¥PWM (4)ADC 変換のドライバ ¥Mini2440¥SRC¥DRIVERS¥Touch 説明:ADC ドライバはタッチパネルのドライバと同じファイルです。 (5)I2C ドライバ ¥Mini2440¥SRC¥DRIVERS¥IIC (6)RTC ドライバ ¥Mini2440¥SRC¥COMMON¥Rtc (7)シリアルポートのドライバ ¥Mini2440¥SRC¥DRIVERS¥Serial (8)タッチパネルのドライバ ¥Mini2440¥SRC¥DRIVERS¥Touch (9)USB ドライバ ホームページ:http://nissin-tech.com メール:[email protected] 290 株式会社日新テクニカ ¥Mini2440¥SRC¥DRIVERS¥Usb USB Slave と USB Host を含む(USB マウス、キーボード、USB メモリをサポート) (10)SD カードのドライバ ¥Mini2440¥SRC¥DRIVERS¥SDHC 説明:32GB の SD カードをサポート (11)DM9000LAN のドライバ ¥Mini2440¥SRC¥DRIVERS¥dm9000 (12)音声のドライバ ¥Mini2440¥SRC¥DRIVERS¥Wavedev 説明:録音と再生 (13)LCD ドライバ ¥Mini2440¥SRC¥DRIVERS¥Display (14)バックライトのドライバ ¥Mini2440¥SRC¥DRIVERS¥Backlight (15)CMOS カメラのドライバ ¥Mini2440¥SRC¥DRIVERS¥Camera 15.4 WinCE6 のコンパイル VS2005 を実行させて、メニュー「File」Æ「Open」Æ「Project/Solution」で 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 291 株式会社日新テクニカ Mini2440 のプロジェクトを開きます。 日新テクニカ メニュー「Build」Æ「Advanced Commands」Æ「Clean Sysgen」でコンパイル開始しま す。数時間がかかります。お待ちください。最後、WinCE6 のイメージファイル NK.bin を生成されます。 日新テクニカ 15.5 WinCE6 を書き込む ARM9ボードのS2スイッチをNor Flashに設定して、電源を入れて、ARM9ボードはNor Flashから起動します。 ホームページ:http://nissin-tech.com メール:[email protected] 292 株式会社日新テクニカ 日新テクニカ 15.5.1 NAND をフォーマットする メニューの中で、機能号[f]を選択して、NAND Flash をフォーマットします。 15.5.2 WinCE のブートローダ メニューの中で、機能号[n]を選択して、WinCE のブートローダを書き込む。 ホームページ:http://nissin-tech.com メール:[email protected] 293 株式会社日新テクニカ 日新テクニカ DNW のメニュー「USB Port」Æ「Transmit/Restore」を選択して、 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 294 株式会社日新テクニカ WinCEのブートローダファイルnboot_XXXを選択して、「開く」を押します。 XXXは使う液晶によって、選択してください。 Superviviも使えます。 15.5.3 起動 logo メニューの中で、機能号[l]を選択して、WinCE の起動 logo を書き込む。 日新テクニカ DNW のメニュー「USB Port」Æ「Transmit/Restore」を選択して、 ホームページ:http://nissin-tech.com メール:[email protected] 295 株式会社日新テクニカ 日新テクニカ 2MB以下の24bitカラーのBMPファイルを選択します。 15.5.4 WinCE を書き込む メニューの中で、機能号[w]を選択して、生成された WinCE ファイル NK.bin を書き込む。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 296 株式会社日新テクニカ DNW のメニュー「USB Port」Æ「Transmit/Restore」を選択して、 日新テクニカ WinCEファイルNK_XXX.binを選択して、「開く」を押します。 XXXは使う液晶によって、選択してください。 ホームページ:http://nissin-tech.com メール:[email protected] 297 株式会社日新テクニカ 書き込み完了すると、WinCE6.0が自動的に起動されます。 15.6 WinCE6 の初体験 15.6.1 タッチパネルの補正 日新テクニカ 「スタート」Æ「設定」Æ「コントロール パネル」を選択し、「スタイラス」をダブルク リックします。タッチパネルが操作できなければ、USBマウスでやってみます。 ホームページ:http://nissin-tech.com メール:[email protected] 298 株式会社日新テクニカ 日新テクニカ 「再補正」ボタンを押すと、補正用の「+」字が現れます。 補正完了すると、「スタート」Æ「サスペンド」 を選択し、補正のデータを保存します。再起動す れば、タッチパネルは再補正が必要ないです。 ホームページ:http://nissin-tech.com メール:[email protected] 299 株式会社日新テクニカ 15.6.2 SD カード/USB メモリ SD カードと USB メモリを挿入する。デスクトップの「マイ デバイス」をダブルクリック すると、SD カードと USB メモリのアイコンが見えます。これらのアイコンをダブルクリ ックすると、SD カードと USB メモリの内容が見えます。 日新テクニカ 15.6.3 周辺機能のテスト 日新テクニカ デスクトップの「友善日新」をダブルクリックすると、周辺機能をテストするアイコンが ホームページ:http://nissin-tech.com メール:[email protected] 300 株式会社日新テクニカ 現れます。 これらのアイコンをダブルクリックしてみます。 15.7 WinCE の起動 logo Windows環境でStartLogoMaker.exeを実行させます。StartLogoMaker.exeはLinux用 のlogo生成ツールのWindows版です。 日新テクニカ メニュー「File」Æ「Open a picture file」で好きなピクチャを選択します。 ホームページ:http://nissin-tech.com メール:[email protected] 301 株式会社日新テクニカ メニュー「File」Æ「Convert」で変換します。 ホームページ:http://nissin-tech.com メール:[email protected] 302 株式会社日新テクニカ 選択したフォルダにはStartLogo.cを生成されます。 StartLogo.cをmini2440-BSP¥Src¥Kernel¥Oalの同名ファイルに取り替え、WinCEを再 コンパイルします。 WinCEの新起動logo ホームページ:http://nissin-tech.com メール:[email protected] 303 株式会社日新テクニカ 15.8 USB 同期ドライバ USBケーブルでボードとパソコンを接続し、ボードを給電します。WinCE用のUSB同期ド ライバをインストールします。 ホームページ:http://nissin-tech.com メール:[email protected] 304 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 305 株式会社日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 306 株式会社日新テクニカ 15.9 WinCE とパソコンの同期 ActiveSync_setup4.5.msiをインストールします。インストールした後、次のようなアイ コンが現れます。 ここをクリッ クします 日新テクニカ メニュー「ファイル」Æ「接続の設定」を選択し、 ホームページ:http://nissin-tech.com メール:[email protected] 307 株式会社日新テクニカ 日新テクニカ 日新テクニカ 「接続」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 308 株式会社日新テクニカ 日新テクニカ 「次へ」ボタンを押します。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 309 株式会社日新テクニカ 日新テクニカ 「OK」ボタンを押します。 日新テクニカ 「いいえ」を選択し、「次へ」ボタンを押します。 ホームページ:http://nissin-tech.com メール:[email protected] 310 株式会社日新テクニカ 日新テクニカ 接続完了の様子 日新テクニカ 接続完了すれば、パソコンはエクスプローラでボードのフォルダが見える、アクセスでき る。 ホームページ:http://nissin-tech.com メール:[email protected] 311 株式会社日新テクニカ 15.10 SDK の生成 日新テクニカ WinCEをコンパイルした後、SDKを生成できます。「Mini2440-CE6-SDK」を右クリック し、メニュー「Build」でSDKを生成開始します。 完了すると、WinCEのSDK C:¥WINCE600¥OSDesigns¥Mini2440¥Mini2440¥SDKs¥SDK1¥Mini2440-CE6-SDK.msiが 生成されます。 ホームページ:http://nissin-tech.com メール:[email protected] 312 株式会社日新テクニカ 15.11 SDK のインストール 生成されたSDK Mini2440-CE6-SDK.msiを実行させます。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 313 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 314 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 315 株式会社日新テクニカ 日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 316 株式会社日新テクニカ 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 317 株式会社日新テクニカ 15.12 WinCE6.0 アプリケーションの開発 VS2005 を実行させて、メニュー「File」Æ「New」Æ「Project」を選択します。 日新テクニカ 日新テクニカ 「Visual Basic」の「Smart Device」を選択し、テンプレートを「Device Application」に設定 し、プロジェクト名を入力し、「OK」ボタンを押すと、次の画面が出てきます。 ホームページ:http://nissin-tech.com メール:[email protected] 318 株式会社日新テクニカ 日新テクニカ メニュー「View」Æ「Toolbox」でボタンを添加します。添加されたButton1をダブルクリッ クして、次のプログラムを添加して、保存します。 ホームページ:http://nissin-tech.com メール:[email protected] 319 株式会社日新テクニカ 15.13 アプリケーションの Debug USBケーブルでボードとパソコンを接続し、接続完了を確認してください。 日新テクニカ メニュー「Tools」Æ「Options」を選択し、次のように設定します。 日新テクニカ 「Properties」ボタンを押して、次のように設定します。 ホームページ:http://nissin-tech.com メール:[email protected] 320 株式会社日新テクニカ 日新テクニカ 「Configure」ボタンを押して、次のように設定します。 日新テクニカ 「OK」ボタンを押します。 メニュー「Tools」Æ「Connect to Device」を選択し、 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 321 株式会社日新テクニカ 次のように設定し、「Connect」ボタンを押します。 日新テクニカ 日新テクニカ 接続中 日新テクニカ 接続成功しました。「Close」ボタンを押します。 メニュー「Debug」Æ「Start Debugging」を選択し、 ホームページ:http://nissin-tech.com メール:[email protected] 322 株式会社日新テクニカ 日新テクニカ 日新テクニカ このように設定し、「Deploy」ボタンを押して、しばらくお待ちください。VS2005はプロ ジェクトをコンパイルし、自動的にボードにダウンロードし、実行させます。次はボード で実行させる様子、「Button1」を押すと、フォームのタイトルが変更されます。 日新テクニカ ホームページ:http://nissin-tech.com メール:[email protected] 323 株式会社日新テクニカ この例はVBで開発されましたが、VC/VC#でも開発できます。 付録 A:NAND Flash を 1GB に交換 64/128/256MB NAND Flashを実装されたmini2440ボードを1GB NANDに交換する方法。 Micro2440も適用です。 まず1GB NAND Flashを用意します。 Mini2440ボードの裏面のNR4/NR5を抜きます。128/256MB NAND Flashのボードには NR4/NR5を実装されていません。 交換した後の様子。 ホームページ:http://nissin-tech.com メール:[email protected] 324
© Copyright 2026 Paperzz