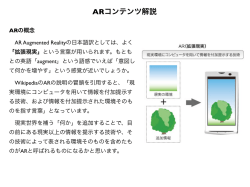
模様プログラムのマニュアル 模様プログラムのマニュアル ・インストールするライブラリ ARToolKit OpenCV OpenGL DirectX SDK boost (c++の強化用ライブラリ) Xerces (XML Parser) インストール方法は各ホームページ参照。ARToolKit だけはややこしいので以下に記載。 http://www.hc.ic.i.u-tokyo.ac.jp/~masaki/pukiwiki-1.4.7_notb/index.php?ARtoolkit%A4 %CE%A5%A4%A5%F3%A5%B9%A5%C8%A1%BC%A5%EB より転載。 ・Artoolkit のインストール方法 http://sourceforge.net/project/showfiles.php?group_id=116280 から、 Download ARToolKit-2.71.1.tgz Download DSVL-0.0.8b.zip をダウンロード http://www.hitl.washington.edu/artoolkit/documentation/usersetup.htm にそってセットアップ。 まずは、ARToolKit を解凍。 DSVideoLib を解凍して、出来る DSVL フォルダを ARToolKit フォルダの中に入れる。 DSVL フォルダの中の DSVL.dll と DSVLd.dll をコピーして、 ARToolKit フォルダの bin フォルダに入れる。 Opengl 用に http://www.xmission.com/~nate/glut.html からダウンロードされる glut32.dll を Windows System32 フォルダーに入れる。 glut32.lib と glut.h を VC の中に入れる。 Microsoft Visual Studio .NET 2003 では、..¥Vc7¥PlatformSDK の中の それぞれ lib フォルダ、include フォルダの中の gl フォルダに入れる。 ARToolKi フォルダ直下にある Configure.win32.bat を実行することで、 config.h を作成する。include フォルダの AR フォルダ内に作成されたか確認する。 ARToolKit.sln をビルドする。 http://sourceforge.net/project/showfiles.php?group_id=116280 から、 Download OpenVRML-0.14.3-win32.zip をダウンロード 解凍して出来るフォルダを ARToolKit フォルダに入れる。 OpenVRML フォルダにある js32.dll をコピーして、 ARToolKit フォルダの bin フォルダに入れる。 ・ ソース http://www.cyber.t.u-tokyo.ac.jp/~nshinya/ からダウンロード 適当なフォルダに saitoLib-src.zip と moyo-src.zip と moyo-data.zip を解凍。 ・ 模様のシートも上記のホームページからダウンロード(leaf_field.zip) ・ コンパイル VisualStudio で。 1. 新規プロジェクトを”saitoLib”として作成(空のプロジェクト) 2. ダウンロードしたファイルのうち saitoLib-src.zip 内のソースファイルをプロジェクト フォルダへすべてコピー、プロジェクトに追加 3. 新規プロジェクトを適当な名前で作成(空のプロジェクト)。ここでは”test”とする 4. ダウンロードしたファイルのうち moyo-src.zip 内のソースファイル全てをプロジェク トフォルダへコピー及びプロジェクトに追加 5. moyo-data.zip 内の Data フォルダをプロジェクトフォルダへコピー 6. プロジェクト”test”を右クリック→スタートアッププロジェクトに設定 7. インストールした各ライブラリにパスを通す ・ツール→オプション→全般→VC++ディレクトリ 「インクルードファイル」に以下のフォルダを指定 ARToolKit/include boost/boost_[バージョン] [Xerces のインストールフォルダ]/include Microsoft DirectX SDK[バージョン]/Include OpenCV/cv/include OpenCV/cvaux/include OpenCV/cxcore/include OpenCV/otherlibs/highgui 「ライブラリファイル」に以下のフォルダを設定 ARToolKit/lib boost/boost[バージョン]/libs [Xerces のインストールフォルダ]/lib Microsoft DirectX SDK[バージョン]/Lib OpenCV/lib 8. プロジェクト”test”を右クリック→プロパティ→構成プロパティ→リンカ→入力の欄に libAR.lib libARgsub.lib libARvideo.lib opengl32.lib glu32.lib glut32.lib libfftw3-3.lib cv.lib cvaux.lib cxcore.lib highgui.lib winmm.lib strmiids.lib ws2_32.lib saitoLib.lib と書き込む。 9. カメラをつなぐ。ここでビルドの前に以下を読み、各ファイルの設定を行う。 ・各ファイルの説明 markerParam.txt 使用するカメラ及びマーカのパラメータ netParam.txt 位置情報を送信するアドレス。送信しない場合は使用しない displayParam.txt param.txt 位置情報送信先に関するパラメータ。このプログラムを普通に利用する際は使用しない Data/*.dat WDM_camera_flipV.xml カメラのキャリブレーションによって得られるカメラパラメータの記載されたファイル、 及びカメラのデバイス情報が書き込まれたファイル。詳細は以下参照 ・設定すべき内容 markerParam.txt 内の値を適切に設定。 カメラのキャリブレーションは ARToolKit の方法で行う。以下のホームページを参照。 ARToolKit のホームページ http://www.hitl.washington.edu/artoolkit/ 工学ナビ http://kougaku-navi.net/ARToolKit.html キャリブレーション結果である dat ファイルは markerParam.txt 内で指定。 WDM_camera_flipV.xml は ARToolKit/bin にある同名ファイルをプロジェクト”test”フォ ルダにコピーしてくる。WDM_camera_flipV.xml の中身のうち friendly_name=”PGR”とい う部分の””の中身を自分の使っているカメラ名に変更。カメラ名はマイコンピュータの画面 でキャプチャデバイスとして表示されるのでそれをそのままコピペする。末尾に#2 などが 付いている場合取り除いてコピペ。 10. ソリューション構成を Release にしてビルド、実行
© Copyright 2026 Paperzz