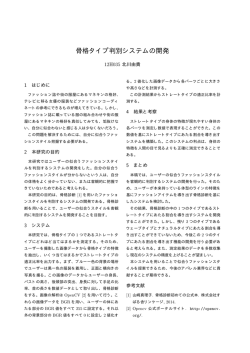
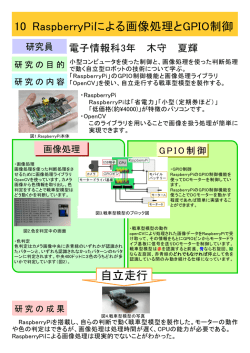
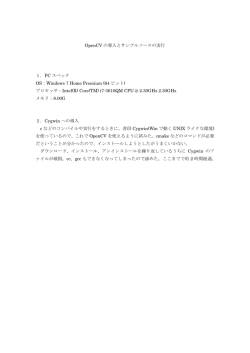
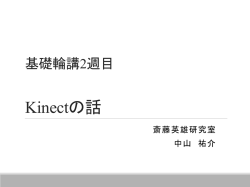
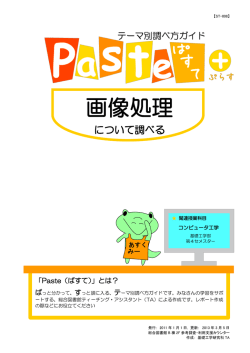
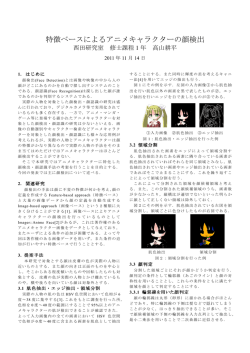
低コストと高精度を両立した全方向空間計測システムの開発 田嶋勝一 大分大学 工学部技術部 [email protected] 1. は じ め に 学術研究や産業利用に用いる測量用三次元レーザースキャナーは広範囲・高精 度の計測を可能とするが機材コストが高く手軽に導入することは難しい。また、 多機能で有るため取り扱いに関しても専門的な知識を必要とする。本研究では、 半 径 10m 以 下 の 室 内 空 間 に 限 定 し た 360 度 全 方 向 の 自 動 計 測 シ ス テ ム の 開 発 を 目 標 と す る 。 機 材 に は 安 価 な web カ メ ラ と ノ ー ト パ ソ コ ン 、 簡 単 な 回 転 装 置 を 利 用 し画像処理技術を用いて三次元レーザースキャナーと同程度の測定精度を目指す。 今回は開発途中であるが経過を報告する。 2.開発環境と装置概要 パソコン ASUS X202E i3 1.8GHz 4GB( 図1) (WEBカメラ2台、USBシリアルアダプター1台接続で問題なく稼働) WEBカ メ ラ Microsoft LifeCamStudio(FullHD仕 様 ) OS:Windows7 Professional Sp1 64Bit 開発言語:Microsoft Visual Studio(C++) Ver2008 Ver2010 使用ツール:OpenCV Ver1.1Pre+Ver2.2 VideoInput0.1995(画像入力) 図 1 測定機器一式 ERSLIB1.8(RS-232C制御)、EWCLIB 2.1(カメラパラメーター制御)、 Point Cloud Library1.5.1(64Bit可視化ツール) 安定化電源 Kenwood PR18-1.2A(モーター用電源) カ メ ラ 回 転 装 置 ( 図2)パソコンよりRS232C制御により設定秒数 間モーターを動かし、回転軸に設置した50mmウォームギヤを駆動して カメラを回転する、カメラ固定法については僅かな位置のずれにより 誤差が拡大するため伸び縮みの少ない布絶縁テープを使用し支柱への 固定にはリベット接合を用いた。カメラ間距離により測定範囲が違う ためカメラ支柱部分とその下の円柱部分は容易に交換可能とした。 3.ソフトウェア概要と処理の流れ 開発している計測ソフトウェアの概要を説明する。 図2 カメラ回転装置 各ソフトウェアはアップデートを行い易くするため処理過程ごとに独立している、 処理手順に沿って以下のとおりである。 ①カメラパラメーターの取得 チェスボードを用いたステレオカメラキャリブレーションによりパラメーター を求める(回転ベクトル、平行移動ベクトル、カメラ行列、歪み係数等) ②ステレオカメラによる測定データ収集 カ メ ラ 回 転 装 置 (図 2 )を 一 定 角 度 ご と 回 転 さ せ 撮 影 を 行 う 、 試 作 機 で は 5 秒 間 - 49 - の 通 電 で 約 6.6°回 転 し そ れ を 54 回 繰 返 し 一 周 分 の デ ー タ を 収 集 す る 。 カ メ ラ の オートフォーカス等の自動設定を利用すると測定距離、照明、反射物など撮影場 所の状況により得られるデータに差が出るため、本システムでは事前に自動で予 備測定を行いパラメータを固定する機能を付加した。 ③画像の補正、対応点探索、視差計算、ワールド座標系へ変換 ①のパラメーターを用いて②で撮影した左右 の画像データへ歪み補正、ステレオ平行化変換 を行い比較画像を作成する、その画像を基にス テレオ対応点探索により視差を計算する、今回 は SGBM( セ ミ グ ロ ー バ ル ブ ロ ッ ク マ ッ チ ン グ ) アルゴリズムを利用し図3のような視差データを 得た、各点の視差データ(対応点のピクセル差) よりワールド座標系へ変換する、これで一つの 測定方向の3次元点群データが算出される、一 図3 元データと視差マップ つの測定場所では1周分54個の点群データが出力される。 ④点群データの位置合わせ 全方向の点群データの可視化を行う場合、回転して撮影 しているので各測定方向の角度を求めて座標変換を行う必 要がある。装置は角度調整の出来ないギヤ-ドモーターを 使用しているので撮影したデータを基に画像処理により回 転角度を求める。図4のように連続する2枚の画像データ の特徴点を求め、一致する特徴点の座標差を求めその平均 を算出し画像データ間の移動量を求める。すべての座標差 の 合 計 を 360°で 割 り 1°あ た り の ピ ク セ ル 数 を 求 め 、 そ れ を逆算して個別の回転角度を求める。 図4 ○部分の中心が 特徴点 4.今後の予定 図 5 は 1 周 分 の 点 群 デ ー タ を PCL を 使 っ て 可 視 化 したものであるがノイズが多く、また張り合わせ位 置のずれなども見られ課題は山積している。対応策 と し て 「 ICP ア ル ゴ リ ズ ム を 使 用 し た 高 精 度 な 位 置 合わせ手法の導入」、「対応点探索精度を向上させ る為、最新の論文を基にプログラムの再構築」、 「最適なカメラ間距離と複数カメラによる精度向上 の検討」、「複数の測定場所のデータを合成するこ とによる測定密度の向上」が考えられる。 図5 全方向点群データの可視化 参考文献 1) 詳 細 OPENCV コ ン ピ ュ ー タ ビ ジ ョ ン ラ イ ブ ラ リ を 使 っ た 画 像 処 理 ・ 認 識 2) デ ィ ジ タ ル 画 像 処 理 CG-ARTS 協 会 - 50 - OREILLY
© Copyright 2026 Paperzz