Technical Article 車載 Ethernet 利用における課題 ~柔軟なインターフェイスとソフトウェアツールでECU開発をシンプルに~ ついに今年、Ethernetが車載ネットワークとして初めて量産車に採用されます。次のステップは、Ethernetと、自動車 業界ですでに確立されているCAN、FlexRay、LIN、MOSTといった技術との統合ということになります。これらの既存の 技術には実用的な開発ツールが存在するため、開発者が異なる複数の通信ネットワークの解析を行うのは簡単です。 しかし、Ethernet側にはIT系の標準ツールしか存在せず、自動車分野専用の物理層やプロトコルはサポートされてい ません。そのため、既存のバスシステムとEthernetネットワークを一緒に解析・テストできる開発/テストツールを確保 することが急務となっています。そのようなツールに対する要求は、具体的にどのようなものなのでしょうか。 最先端の技術では、安価なUTPケーブル接続を使用して車載 カメラの画像を100MBit/sで伝送することがすでに実現されてい ます。これは 「BroadR-Reach®」という技術で、OPEN Alliance SIG 車載Ethernet用テストソリューションにおける課題 車両でEthernetを使用するにあたり、開発およびテスト担当者 コンソーシアムによる標準化が行われています (参考文献 [1]) 。 は、設計や開発、テスト手法などの見直しが必要となります。最初 2015年までにEthernetをインフォテインメントや運転者支援シス に取り組むべき課題は、ドメインアーキテクチャーの明確な設 テムのネットワークに使用するという次なる目標が掲げられてお 計です (図2)。このアーキテクチャーでは、バックボーンはもはや り、早ければ2018年には、Ethernetがバックボーン技術になると バスシステムではなく、複数の全二重接続を持つスイッチング 一部の自動車メーカーは予想しています (参考文献 [2]) 。複数の ネットワークの形で実装されます。クリティカルなリアルタイム 文献で報告されているように (参考文献 [3][4]) 、車載Ethernet アプリケーションをこのアーキテクチャーで実現するには、物理 は特定のインターネットプロトコルを組み合わせた場合に、一層の 層 (OSI 層 1) より上位のプロトコル層に、AVB (Audio Video 柔軟性、拡張性、経済性を発揮します (図1、参考文献 [1])。また Br idging、図1) などの同期技術が必要です。この新しいアー そこには、IT分野の開発手法などを利用し、実績ある自動車開発 キテクチャーでは解析に対する要c求も増え、仮に開発者がバック プロセスの拡充を図るチャンスも秘められています。 ボーン上のすべてのデータトラフィックを同時に解析したい場合は、 April 2013 1 Technical Article 図1: ITの分野で一般的なUDP、TCP、IP などのプロトコルに加え、車載用に 特化したプロトコルも使われます。 これらはISO CD 17215-1で規定さ れています。 アクセスをすべてのパスの分岐上 (図2、a、b、c、d) で同期しなけ 考慮に入れる必要があります。一方、ツールメーカー側では、イン ればなりません。 ターフェイスによる影響を最小限に抑える必要があります。以下 次に、膨大な量のデータ処理を行うため、適切なフィルター方法 に、解析やテストを目的とした各種の測定構成について、それから を新たに検討しなければなりません。自動車メーカーがすでに構想 生じる望ましくない影響やそのような影響を最小限に抑える方法 に入れているGB/sレベルの伝送速度が実現すれば、状況はさらに と併せて説明していきます。 厳しいものになります。1GB/sの規格として、IEEE 802.3bpRTPGE (Reduced Twisted Pair Gigabit Ethernet) という物理層の規格の 従来のソリューションにおける制限 策定がすでに進められています。 Ethernetネットワークの解析でまず用いられるのが、システムを インターフェイスがシステムのパフォーマンスに及ぼす 影響を最小限に 構成するスイッチ上で追加のポート (モニターポート) を使う方法 (ミラーリング) です。このモニターポートにはスイッチの全受信パ ケットが転送されます。これによって受信されたデータパケットへの バスシステムとは異なり、Ethernetではシステムに対する測定 アクセスは可能になりますが、タイムスタンプがセットされておら の影響を避けるための特別な対策が必要となります。開発者側で ず、それらのデータパケットと共通の時刻基準とを関連付けること はシステム設計の早い段階 (設計-テスト) からテストの容易性を ができません。また、多くの場合は有効なパケットのみがモニター 図2: 今後考えられる車載ネットワークのドメイン アーキテクチャー。すべてのEthernetパケット を解析するには、解析ソフトウェアはすべて のEthernetパスを同期して測定しなければ なりません。 April 2013 2 Technical Article ポートに転送されるため、エラー解析も困難です。さらに、コスト が必要です。ネットワーク解析の対象となるEthernetパスは1つに 上の理由から、量産車のシステム内のスイッチにミラーリング用の 限らないことが多く、これらのタイムスタンプには他のインターフェ モニターポートが用意されることはありません (参考文献 [4]) 。 イスとの同期が必要です (図2)。 スイッチで利用可能なポートがなければ、既存の接続にスイッチ アクティブでないインターフェイスにおいても、動作が透過的で を新たに追加できますが、このように追加したホップは透過的でな あることは大切です。たとえば、インターフェイスを設置した車両 く、伝送パス全体の遅れの原因となります。AVBプロトコルで同期 でテストトライブを行う場合は、測定アプリケーションが実行中でな されているネットワークの場合、状況によっては、スイッチの追加に くても、インターフェイスは事前構成済みのスタンドアローンモード よる遅れが原因で時刻同期に問題が生じる恐れがあります。 に自律的に切り替わらなければなりません。切り替わらなければ、 この測定構成では、IT分野で一般に用いられているツールとス 運転中にEthernetの特定のパスで中断が発生します。 イッチを利用できます。ただし、主に自動車業界で使われている BroadR-Reachネットワークでは、Ethernet (IEEE 802.3) への メディア変換を行うことが必要です。さらに、これらのツールの多 くはEthernetのみに対応しています。そのため、CAN/LIN/FlexRay TAPとスティミュレーション 単なるデータ解析のほかに、ネットワークでは特定のパケットを などのバスシステムが含まれる場合は、他のツールが必要になります。 意図的に送信して行うテストがしばしば必要となります。このテス これは車載ネットワーク開発の観点からいえば、十分なソリューショ トでも、単なるモニターの場合と同じく、任意の2ノード間の接続 ンではありません。 に極力影響が出ないようにしなければなりません。ただし、これら の追加パケットは物理層からは直接送信できません。それは、 透過的なEthernet解析 ネットワークをモニターするには、従来のスイッチをインターフェ イスに使用する方法ではなく、できる限り透過的な方法を用いた方 が適切です。ここでの第一の目的は、遅延時間の増加やエラーパ フロー制御が新たに必要になるためで、これはデータリンク層で 処理すれば対応できます。ここでも動的な遅延時間は発生しま すが、それはAVB などのプロトコルをインターフェイスがサポー トしていれば、直接補正できます。 これを利用した例の1つが、2ノード間の正常な通信中に、テス ケットのフィルターによってシステムに影響が出るのを防ぐことで ト用の障害データを追加して送信するケースです (図4のパス3)。 すが、これはいわゆるTAP (Test Access Point) (図3) を用い、物理 このデータはVector CANoe.IPなどのテストアプリケーションから 層のデータ (図4のパス1) をパッシブに取得してルーティングすれ 直接送出されるか、インターフェイスのパケットジェネレーターが ば実現できます。このプロセスの遅延時間は非常に短くかつ一定 定義済みのバス負荷になるように直接データを生成し、そこから で、AVBシステムの解析では特に有利です。透過的なモニターを 送信送出されます (図4のパス2)。 行うための手段として、AVBの時刻同期機能に対応したスイッチを 使う方法もあります。これを使用すると、パケットのルーティング 残りのバスシミュレーション で発生する遅延時間がAVBプロトコルにより補正されます。 どの方法を選ぶにせよ、パケットデータを正確に解析するには、 物理層にできるだけ近い部分で取得した高精度なタイムスタンプ 残りのバスシミュレーション (参考文献 [6]) は、特にECUの個別 開発の際、実際のネットワークへの統合前に多様なシナリオで柔軟 図3: 解析または残りのバスシミュレーションで考 えられるEthernetインターフェイスの配置。 一般的な車載バスシステムとの同期も必要 です。 April 2013 3 Technical Article 第2に、アプリケーションはこのハードウェアに対し、ログデータや > そのインターフェイスにより、一般的に使われている BroadR-Reach、Fast Ethernet、Gigabit Ethernetや、 今後策定されるRTPGEなどのあらゆるメディア間でのコ 自己生成データを転送できなければなりません (図4のパス4)。 ンバートが可能であること。これによって、従来必要で 第3に、このハードウェアとソフトウェアを組み合わせてパケットを あった外部メディアコンバーターが不要になります。 にテストを実施するための方法です。第 1に必要となるのは、ネッ トワークに無制限でアクセスできる高性能ハードウェアです。 受信し、そのパケットにエラーを加えて送信できなければなりませ ん。そのような機能によって、プロトコルエラーなどの特定の > インターフェイスはテストドライブの際に車両内に設置 でき、使用していない間はネットワークを妨害しないこと エラーケースに対するECU の動作テストが可能になります。 柔軟なインターフェイス /ソフトウェアの組合せが持つ 重要な特性 (スタンドアローンモード)。 > 自動車開発のプロセスでは、解析のほかに管理された状 態で実施されるスティミュレーションも必要であるため、 ソフトウェア/ハードウェアのいずれのレベルでもパケット ジェネレーターは重要になります。 これまでの測定構成の説明から、Ethernetネットワークの解析 ではハードウェア/ソフトウェアに多様な要件が求められることが分 かります。測定構成ごとにインターフェイスを変更する手間を省く ため、インターフェイスはTAPやコンバーター、そしてその他の 機能を備えたスイッチとして、臨機応変に使用できなければなり ません。これには、以下のような特性が求められます。 > ごく単純にインターフェイスをTAPとして使用する場合 は、そのTAP自身に起因する遅延時間が非常に小さく、 またそれを精密に特定できること。 > ハードウェアインターフェイスとシミュレーションソフト ウェアの連携により、1つ、さらには複数の仮想ネット ワークノードに実メディアでアクセスできること (残りの バスシミュレーション)。 > 解析/シミュレーションツールを使用し、対象とするOSI ネットワーク層とプロトコルレベルのすべてで、データ の解析と操作が実行できること。 > 一般的に使用されているバスシステムとインターフェイス を同期させ、異なる複数の通信ネットワークに対応できる こと。 IT通信分野で使われる高性能の解析ツールに外部メディアコ ンバーターを併用する方法は、多くの場合、過度に単純化されて います。ここに挙げた要求は、専用のハードウェアを解析/シミュ レーションソフトウェアと綿密に連携させて初めて実現できます。 現場ですでに使われている組合せの1つが、ベクターが提供す るEthernet/CANインターフェイスのVN5610と、開発ツールの CANoe.IPです。このソリューションは、すでに一部の自動車メー カーやサプライヤーに使用されています。 展望 今後 5 年から10 年の間、車載ネットワークとして異なる複数 のネットワークが、引き続き既存のバスシステムの集合体とし て構成されていくことでしょう。カメラを用いたアプリケーショ ンに続いて、Ethernet はシステムの他の分野に使われるほか、 ある程度は他のバスシステムに置き換わっていくことが考えら 図4: Ethernet/CANインターフェイスのVN5610はCANoe.IP/ CANalyzer.IPと連携し、パッシブ/アクティブにEthernet ネットワークの通信に加わります。柔軟な構成により、解析 およびテストを目的とする多様な測定構成に対応します。 れます。Ethernetや IP の技術がバックボーンに採用されれば、 以後は自動車の他のアプリケーション分野へとその使用は拡大 していくはずです。 車載ネットワークの開発者にとって、マルチバス機能、残りのバ スシミュレーション、全データパケットに対する高精度なタイムス タンプといった機能は、今後も重要度を増していくことでしょう。 April 2013 4 Technical Article ベクターはEthernetおよびIP分野における次の開発ステップと して、すべてのIPプロトコル層のシグナル表現 (図1) でユーザー を支援すること、そしてAVBやSOME/IPなどを介したサービス指 向型のリアルタイム通信を包括的に検証できるようにすることを 目指しています。 参考文献: [1] OPEN Alliance SIG, http://www.opensig.org/ [2] Das IP-basierte Bordnetz kommt [“The IP-based on-board electrical system is coming”], Elmar Frickenstein, BMW AG, SEIS Status seminar, 2011-20-09, http://www.strategiekreis-elektromobilitaet.de [3] Ethernet und IP im Kraftfahrzeug: Neue Anforderungen an das Entwick lungswerkzeug durch den Ethernet- und IP-Einsatz [“Ethernet and IP in motor vehicles: New development tool requirements for the use of Ethernet and IP”], Hans-Werner.Schaal, Elektronik automotive, April 2012 [4] Herausforderungen von Ethernet-Debugging [“Challenges of Ethernet debugging”], Helge Zinner, www.elektroniknet.de, October 2012 [5] ISO CD 17215-1 (E) of 2012-07-02 [6] Schnelle Wege zur Restbussimulation: Virtuelle Netzwerke ohne Programmier-Know-how erstellen [“Quick paths to remaining bus simu lation: Creating virtual networks without requiring programming know how”], Stefan Albrecht and Peter Decker, Automobil Elektronik, March 2012 執筆者: Hans-Werner Schaal Vector Informatik GmbHの事業開発マネー ジャー とし て、IPとCar2x、さら にJ1939、 ISO11783などのCANベース) のプロトコル 分野を担当。 提供元: 見出し画像/図1 ∼ 4:Vector Informatik GmbH Matthias Schwedt リンク: ベクターのIP/Ethernetソリューション http://vector.com/vj_ip_ethernet_solutions_jp.html Vector Informatik GmbH で Ethernet 、 FlexRay、MOST150のネットワークインター フェイス用FPGAの開発に携わる一方、VN56xx のEthernetネットワークインターフェイスファ ミリー全体のプロジェクトリーダーも担当。 ベクター・ジャパン http://www.vector-japan.co.jp ■ 本件に関するお問い合わせ先 ベクター・ジャパン株式会社 営業部 (東京) TEL:03-5769-6980 FAX:03-5769-6975 (名古屋)TEL:052-238-5020 FAX:052-238-5077 E-Mail:[email protected] April 2013 5
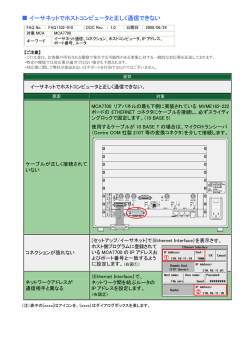
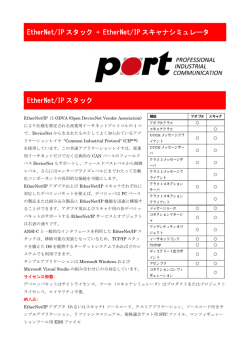
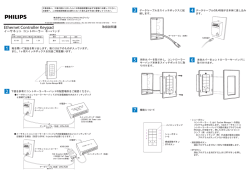
© Copyright 2026 Paperzz