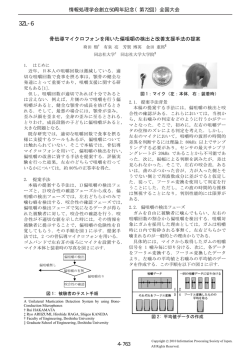
全方位ビデオカメラを用いた広域屋外環境の仮想化 横矢 直和 奈良先端科学技術大学院大学 情報科学研究科 あらまし : 複合現実空間の構築を目的とした実環境の仮想化における大きな課題は、インタラクティ ブな映像空間探訪を可能とする広域屋外環境の映像入力である。近年、多視点画像の取得とイメージ ベーストレンダリングによる任意視点画像の生成法が多く発表されるようになってきたが、本報告で は、側方 360 度の視野を有する全方位ビデオカメラを用いた動的な広域屋外情景の入力・仮想化の 試みを紹介する。これは複合現実が扱う現実世界から仮想世界への連続スペクトル上では、現実世界 の情報で仮想世界を構成・増強する augmented virtuality に属する。まず最初に、1 点への中心投影 の光学特性をもついくつかの全方位画像センサについて述べ、次に、それらを用いた実時間/蓄積再 生型テレプレゼンスシステム、没入型複合現実空間構築等の具体的な応用事例を紹介する。 Virtualizing Outdoor Dynamic Real Environments Using Omnidirectional Video Cameras Naokazu Yokoya Graduate School of Information Science Nara Institute of Science and Technology One of the most important issues in mixed reality is to capture dynamic real environments for realizing the interactive walk-through in virtualized real environments. Recently an increasing number of attempts have been reported for generating arbitrary views from a limited number of multiple-viewpoint images by using image-based rendering techniques. This paper describes approaches based on omnidirectional video cameras with 360-degree of view for virtualizing dynamic real environments, which are typical of augmented virtuality in mixed reality. First we describe some prototypes of omnidirectional image sensors which satisfy the single-viewpoint constraint. Then described are case studies including telepresence systems and construction of immersive mixed environments from both minute-to-minute and recorded omnidirectional video streams. Abstract: 1 はじめに 境の入力と仮想化は画像計測・コンピュータビジョ ンが中心的な役割を果たすことになる [3]。本報告 では、複合現実感のための実環境情景の入力と仮想 近年、実環境と仮想環境のシームレスな融合を目 指した複合現実感 (mixed reality) の研究 [1, 2] が注 化に話題を絞る。 目されるようになり、次世代情報処理の中核の 1 つ 実写に基づく仮想化実空間構築においてはイメー として期待されている。このため、関連する大型の ジベーストレンダリング等の手法を駆使して任意視 研究開発プロジェクトがいくつか進行中である。複 点の映像を生成することになる。実環境に忠実な仮 合現実感を実現するための技術おいては、視覚に関 想化空間での自由な移動を実現するためには任意視 わる部分が大きな比重を占め、中でも、動的な実環 点・方向の情景を時系列で映像として取得する必要 1 2 があるが、これは一般的な屋外環境では本質的に不 可能である。そこで、次善の策として、多視点で広 全方位ビデオカメラ 先に、複合現実環境構築のための実世界映像取得 視野映像を取得し 、それをもとに近似的に 3 次元任 用入力系に求められる条件として (a) 〜 (e) の 5 つの 意視点画像を生成することになる。広視野画像を得 特性をあげたが、以下では、これらを意識して開発・ る方法には、(1) 撮影方向の異る複数の静止画像の 張り合わせ [4] 、(2) 回転カメラの利用 [5] 、(3) 魚眼 試作したいくつかの全方位画像センサを紹介する。 レンズ等の利用 [6] 、(4) レンズ・ミラー系の巧妙な 2.1 組み合わせによる全方位画像センサ [7, 8, 9, 10] 1 、 HyperOmni Vision HyperOmni Vision [8] は移動ロボットの視覚セ ンサとして考案されたもので、図 1 に示すように、 鉛直下向きに設置した回転 2 葉双曲面ミラーの回転 軸上の外側焦点位置に投影中心が一致するようにカ メラを鉛直上向きに設置し 、側方 360 度の情景の双 曲面での鏡像を撮像する構成になっている。下方視 野はカメラ自体が映り込む部分を除いて 90 度に近 く、上方視野は双曲面ミラーの形状により変化する (図 1 の ver.2A では 20 度)。 等があるが、動的な環境を扱えない、光学特性が 1 点への中心投影でない等の理由で、複合現実感のた めの実環境入力系としては不向きなものも多い。 複合現実環境を生成するために撮像される情景は 広視野かつ動的で、また最終的には人間への提示を 目的としているため、取得画像からディスプレ イ・ スクリーン面への高解像度な透視投影画像が得られ る必要がある。また、仮想的な物体の配置やユーザ の両眼への立体画像提示のためには実空間の奥行き 情報も必要となる。このため、複合現実感のための Z 画像入力センサは、 Focal Point Hyperboloidal Mirror OM (a) 全方位画像取得、 (b) 実時間 (ビデオレート ) 撮像、 c b Y (c) 高解像度、 (d) 1 点中心投影の光学特性2 、 O X x c (e) ステレオ撮像、 OC の条件を満たすことが望ましい。 y P(X,Y,Z) p(x,y) Image Plane Camera Center 筆者らのグループでは従来から、上記 (4) のアプ 図 1: 全方位画像センサ HyperOmni Vision ver.2A ローチで条件 (a) 〜 (e) を意識したいくつかの全方 OM に 向かう光線はミラーで反射されて外側焦点 OC を 通過する。ここで、図 1 に示すように Z 軸を鉛直 軸とする 3 次元世界座標系 (X; Y; Z ) と画像座標系 (x; y ) を考えると、3 次元空間中の点 P (X; Y; Z ) と 全方位画像中の写像点 p(x; y ) の間には次式の関係 位ビデオカメラを製作し 、動的な実環境を対象とし 図 1 の構成において、双曲面の内側焦点 た、実時間/蓄積再生型テレプレゼンスシステム、没 入型仮想化実空間構築等の具体的な応用を開拓して きた。以下、本報告では 、まず 2 章で 、ミラーと CCD カメラを組み合わせたいくつかの全方位画像 センサの構成例を示し、複合現実感用センサとして のその特長と問題点を明らかにする。3、4 章では、 が成り立つ。 これらのセンサを用いたテレプレゼンスシステム、 f (b2 0pc2 )X (b2 + c2 )(Z 0 c) 0 2bc X 2 + Y 2 + (Z 0 c)2 f (b2 0pc2 )Y y= 2 2 (b + c )(Z 0 c) 0 2bc X 2 + Y 2 + (Z 0 c)2 ただし、f はカメラの焦点距離であり、a 、b 、c は双 x= 没入型複合現実空間構築の事例を屋外撮像データを 用いた実験例とともに紹介する。 1 厳密にはドーム状の全方位視野を有するセンサを指すが、側 方 360 度の視野を有するものや前方超広視野を有するものを全 方位センサと呼ぶことが多い。全方位撮像の考え方は天文学での 全天空写真撮影等で古くからある。全周パノラマビュー・カメラ のアイデアも 1960 年代に遡ることができ、コンピュータビジョ ンとほぼ同じ歴史をもつ [11]。 2 特定の視点での平面透視投影画像を生成するためには 1 点 への中心投影像が得られている (単一視点制約) 必要があり、レ ンズ・ミラー系の構成が限定される [12]。現状の撮像系との組合 せでこの条件を満たす代表的なミラー形状は平面 [13] 、双曲面 [8] 、放物面 [9] である。 曲面ミラーのパラメータである。このように、HyperOmni Vision は単一視点制約を満たし 、内側焦 点 (OM ) を投影中心とした双曲面中心投影像が得ら れる。このため、内側焦点から見た通常の平面透視 2 投影画像 (図 2 参照) や様々な表面形状をしたスク 双曲面2 内側焦点1 リーンへの投影像を容易に計算によって求めること ができる。HyperOmni Vision は 1 台のカメラを使 内側焦点2 用するため、製作とキャリブレーションが比較的容 易であるという特長も備えている。反面、撮像画像 ステレオ視野 の分解能はカメラの解像度で抑えられる。整理する と、先の条件 (a) 、(b) 、(d) を満たす。 KÇÏ¹Ý 双曲面1 µ¹Ý 画像平面 双曲面2の反射像 双曲面1の反射像 外側焦点 図 2: 全方位画像からの平面透視投影画像の生成 2.2 カメラ 図 3: Stereo HyperOmni Vision の構成 Stereo HyperOmni Vision 2 種類の双曲面を接合した複合双曲面ミラーを用 いることによって、HyperOmni Vision のステレオ 化が可能である [14]。構成は、図 3 に示すように鉛 直下向きの 2 つの異なる回転 2 葉双曲面 (中心部の 双曲面を双曲面 1 、周辺部の双曲面を双曲面 2 と呼 ぶことにする) を結合したミラーとその真下に鉛直 上向きに設置した CCD カメラから成る。ここで、 2 つの双曲面は軸を共有し 、その外側焦点が一致し ている。カメラはレンズ中心が双曲面の外側焦点に 一致するように配置する。視野の中心部には双曲面 1 による全方位画像を、周辺部には双曲面 2 による 全方位画像を結像することになる。この 2 つの全方 位画像は2つの双曲面の内側焦点への中心投影像で あるため、双曲面 1 と双曲面 2 の内側焦点間距離だ けカメラを縦方向にずらして撮像したステレオ画像 になっている。ステレオ視できるのは双曲面 1 と双 曲面 2 の共通視野部分である (図 3 参照)。 図 4: 試作した Stereo HyperOmni Vision の外観 内環境では、2 つの像の同時合焦が難しいという問 題点がある。 2.3 対称ピラミッド 型ミラーを用いた全 方位ステレオ画像センサ 前節までに紹介した HyperOmni Vision は 1 台の 本装置で取得した全方位ステレオ画像では、3 次 通常のビデオカメラで視野 360 度を撮像するため、 元空間中の点は画像中心からの同一の放射線上に必 画像提示の観点からは解像度が低いという問題があ ず投影される。 ただし、先にも述べたように、本セ る。この問題を解決すると同時にステレオ撮像を可 ンサで得られるステレオ画像は通常の水平 2 眼ステ 能にする全方位ステレオ画像撮像装置を設計・試作 レオと異なり、縦方向視差を有する。 している [13, 15]。 実際に試作したセンサの外観を図 4 に示す。本 試作装置は図 5に示すように、6 面ピラミッド 型 センサは、基本的に HyperOmni Vision の性質を有 ミラーを用い、投影中心の虚像が一致するように配 し 、それに加えて先の条件 (e) を満たす。しかし 、 置した 6 台のカメラで側方 360 度の情景を撮像し 、 解像度に関しては当然のことながら 、HyperOmni 同じ構造を上下対称に 2 つ配置することによってス Vision よりもさらに劣る。また、通常の明るさの室 テレオ撮像を可能にしている (通常の水平 2 眼ステ 3 レオと異なり、縦方向視差を有する)。ここで 、上 基づく簡単なステレオマッチングにより取得した全 下各 6 台のカメラは仮想的な投影中心を共有してお 周パノラマ距離画像を同図 (b) に示す。 り、通常のピンホールカメラモデルに従うと仮定す 本装置は先に示した条件 (a) 〜 (e) をすべて満足 ると、撮影された画像はそれぞれ 6 角柱表面への 1 する。しかし 、(i) 複数のカメラを使用し各カメラの 点中心投影像になっている。試作センサの外観と屋 視野が原理的に重ならないため、カメラ位置の調整 外撮像用の車両を図 6 に示す。全 12 台のカメラに が難しい、(ii) 樽型歪みの完全な除去が難しく、隣 よる撮像画像は時間的な同期をとって 12 台のビデ 接カメラ画像の接合部に隙間や重複が生じる、(iii) オデッキに並列的に記録される。 カメラの特性のばらつきによって画像処理による色 camera camera camera camera camera 補正が必要になる、等の本センサの構成原理と複数 カメラの使用に起因した問題が発生する。 lens center 3 upper component 全方位ビデオストリームを用い たテレプレゼンスシステム virtual center of lenses pyramidal mirror 複合現実感の 1 つの形態に、時間的、空間的に離 れた遠隔実世界への没入感を与えるテレプレゼンス lower component camera camera camera がある。以下では、前章で紹介した全方位ビデオカ camera メラで取得した全方位ビデオストリームを用いたテ レプレゼンスシステムの例を紹介する。実時間型と front view 蓄積再生型の両システムが可能である。 top view 図 5: 対称ピラミッド 型ミラーを用いた全方位ステ 3.1 レオ画像センサの構成 HMD を用いたテレプレゼンス HyperOmni Vision と磁気トラッカー付き頭部搭 載型画像表示装置 (HMD) を用いた実時間/蓄積再生 型テレプレゼンスシステム [16, 17] の構成を図 8 に 示す。この場合、ユーザの視線変化に追従した実時 間画像提示が不可欠であり、さらに視線の変更から 画像提示までの時間遅延を極力抑える必要がある。 従来の可動カメラを用いたテレプレゼンスシステム では、ユーザの視線方向に応じてカメラを機械的に 動かすための時間遅延が生じ 、また、遠隔地の観察 では通信時間による遅延も無視できないが、全方位 ビデオカメラを用いることによってこれらの問題点 を解決するとともに、複数人の同時利用が可能なテ レプレゼンスシステムの構成が可能になる。 図 6: 試作した全方位ステレオ画像センサと搭載車両 全方位ステレオ画像センサを車両に搭載して平城 京遷都 1300 年記念事業の一環として復元された朱 プロトタイプシステムで使用した機器の詳細を表 雀門前 (奈良市) で取得したカメラ画像に対して Tsai 1 に示す。実時間型システムにおける全体の処理の 流れは以下の通りである (蓄積再生型システムでも ステップ 1 以外は同じ )。 1. HyperOmni Vision で撮影した全方位画像を計 算機に無線伝送する。 のアルゴリズムを用いて樽型歪みの補正を行なった 後に、これらの鏡像部分から合成した全周ステレオ パノラマ画像 (円筒面への透視投影画像) を図 7(a) に示す (全周ステレオパノラマ動画像生成の詳細に 環境の高分解能ステレオパノラマ撮像が可能である 2. ユーザの装着する HMD に取り付けた 3D 磁気 トラッカーで視線 (頭部) の方向を計測する。 (図 7 の各生成パノラマ画像は 3000 × 350 画素) 。 また、上側パノラマ画像を基準画像として相関法に 3. 計算機でユーザの視線に対応した透視投影画像 を生成し 、HMD に表示する。 ついては文献 [13, 15] 参照)。本装置により、動的実 4 (a) 全周パノラマステレオ画像 (b) 全周パノラマ距離画像 図 7: 試作装置で取得した全周ステレオパノラマ画像と距離画像 (平城京跡地の朱雀門前) ステップ 3 で、生成画像 (720 × 486 画素) の全画 素について全方位画像内の対応点を計算すると実時 間での画像生成は難しい。そこで、粗い格子点上で !& !& のみ座標計算を行ない、隙間は線形な画像変形 [18] によって補間する (図 9 参照)。この場合、格子点が 少ないと、画像の幾何学的な歪みが目立つため、生 成画像に歪みが目立たない程度の格子点数を設定す $% # ! " '% $& る必要がある。画像生成時間と画像の幾何学的歪み に関する評価実験を行ない、全方位画像、生成画像 ともに 720 × 486 画素の場合、表 1 の機器構成に 図 8: HMD を用いたテレプレゼンスシステムの構成 おいては、画像更新間隔を 1/30 秒以下に抑えるた めには格子数は 32 × 24 以下、幾何学的歪みが視覚 表 1: テレプレゼンスシステムの使用機器 的に目立たないためには格子数は 16 × 12 以上とい 全方位画像センサ 画像無線送受信器 計算機 う結論を得ている [17]。視線変化から対応する画像 表示までの時間遅延は 51.5 〜 93.1 ミリ秒である。 HyperOmni Vision ver.2A Premier Wireless CS-200 SGI Indigo2 (R4400, 250MHz) Maximum Impact 開発したプロトタイプシステムを用いて 、谷瀬 (Texture Engine: 119Mpixels/s) の吊り橋 (奈良県吉野郡十津川村) を歩行しながら HMD HyperOmni Vision で撮影した全方位ビデオストリ ームをもとに蓄積再生型テレプレゼンスを実現した 例を図 10 に示す。 Impact Video OLYMPUS Mediamask (512,880 pixels) (Input: S-Video NTSC) 磁気トラッカー POLHEMUS 3SPACE FASTRAK 3.2 CAVE 型環境でのテレプレゼンス 2 章で紹介した全方位ビデオカメラはいずれも単 一視点制約を満たすため 、任意の表面形状をした CAVE 型スクリーンへの対応も容易である。ここで は、330 度大型円筒スクリーンから成る全周型景観 提示システム CYLINDRA 3での実現例について述 べる。 Source Image 3 Cylindrical Yard with Large, Immersive and Novel Display for Reality Applications の略。 Destination Image 図 9: 画像変形による疑似透視投影画像の生成 5 (1) (2) (3) (4) (5) (6) (7) (8) (a) 7 秒間の全方位ビデオストリームからのサンプル (1) (2) (3) (4) (5) (6) (7) (8) (b) ユーザの視線に追従した HMD 提示画像系列からのサンプル 図 10: HMD を用いたテレプレゼンスシステムによる実環境 (谷瀬の吊り橋) の仮想体験 線に追従した画像を生成する必要はなく、常に円筒 スクリーンの中心を視点とした全周パノラマ画像 を計算すればよい。ただし 、円筒面への内側からの 映像投影を考慮した透視投影画像の生成が必要であ る。提示画像の実時間生成には、3.1 節で述べた方 Onyx2 IR User 法と同様に画像変形を用い、HyperOmni Vision で Graphics Board CYLINDRA System 取得した全方位画像から全周パノラマ画像を生成す るのに 96 × 12 の格子 (各提示画像は 16 × 12) を用 Graphics Workstation いてビデオレートでの画像計算を実現している。6 図 11: 全周型景観提示システム CYLINDRA の構成 台のプロジェクトからの投影画像を図 12 に、また CYLINDRA での仮想体験の様子を図 13 に示す。 CYLINDRA のシステム構成を図 11 に示す。本 装置は 330 度の視野を 6 台のプロジェクタで分割表 示する構成になっており、各プロジェクタへの画像 を全方位画像から実時間で生成・送信する。なお、現 状の構成では 1 つのグラフィックスボードが 3 つの プロジェクタを担っている。本装置は全周スクリー ンを有するため、前節の実現例のように観察者の視 CYLINDRA のスクリーンは円筒面であるが、先 にも述べたように、単一視点制約を満たす全方位画 像を用いることにより、任意のスクリーン形状に対 応することができる。一例として、図 10(a) のビデ オストリーム中の 1 フレームから生成した直方体形 状をした 4 面 (前面、下面、左右面) マルチスクリー ンへの投影画像を図 14 に示す。 6 図 12: CYLINDRA に投影する 6 枚の円筒面画像 図 15: テクスチャ付き遠景用 3 次元モデルの一部 る複合現実空間の構築 [20] について述べる。遠景 図 13: CYLINDRA での実環境の仮想体験 用のテクスチャ付き 3 次元モデルの生成は以下のス テップから成る。 1. 図 7(a) に示したような全周パノラマステレオ 画像からステレオマッチングにより同図 (b) の ような距離画像を得る。 2. 上側全周パノラマテクスチャ画像のエッジ点と 全周パノラマ距離画像を一定間隔でサンプリン グした点を Delaunay 三角分割により接続する。 図 14: 4 面 CAVE 型スクリーンへの投影画像の例 4 3. ステップ 2 で得られた頂点の奥行き値を用いて 3 次元パッチモデルを生成する。 全方位ステレオ画像を用いた没 4. 3 次元パッチモデルに上側全周パノラマテクス チャ画像を張り付ける。 入型複合現実空間の構築 仮想空間を実写画像で構成・増強する augmented 以上のステップで得られたテクスチャ付き 3 次元 virtuality[19] の考え方は幾何形状の上に実写画像を 張り付けるテクスチャマッピングに遡ることができ、 没入型複合現実環境の構築においても、遠景を平面 や円筒面への実写画像のテクスチャマッピングで実 現している例が多い。しかし、このような場合、運 動視差や物体同士の奥行き隠蔽関係の再現が困難で、 視点移動時の臨場感に欠けるという問題がある。 遠景モデルに対して、背景シーンの奥行き情報を考 慮して近景の CG オブジェクトを合成する。3 次元 遠景モデルへパノラマ画像をマッピングした例を図 15 に示す。CYLINDRA 上でこの複合現実空間の ウォークスルー機能を実現しており、遠景用モデル が 3251 ポリゴン 、近景用モデルが 41340 ポリゴン の場合で、シーン更新レートは平均 10 フレーム/秒 ここでは、2.3 節で紹介した全方位画像センサで である。図 7 のデータを用いて朱雀門周辺に CG 取得した全方位ステレオ画像を用いて遠景用 3 次元 オブジェクトを配置した複合現実環境をウォークス モデルを作成し 、近景を CG オブジェクトで構成す ルーしている様子を図 16 に示す。 7 vision-guided navigation", IEEE Trans. Robotics and Automation, Vol.10, No.1, pp.11- for 22, Feb. 1994. [8] 山澤, 八木, 谷内田: \移動ロボットのナビゲーショ ンのための全方位視覚系 HyperOmni Vision の提 案", 電子情報通信学会論文誌 (D-II), Vol.J79-D-II, No.5, pp.698-707, May 1996. [9] S.K. Nayar: \Omnidirectional video camera", Proc. DARPA Image Understanding Workshop, May 1997. [10] Y. Yagi: \Omnidirectional sensing and its applications", IEICE Trans. Information & Systems, Vol.E82-D, No.3, pp.568-579, Mar. 1999. [11] D.W. Rees: \Panoramic television viewing system", US Patent No. 3, 505, 465, Apr. 1970. 図 16: CYLINDRA での複合現実空間 (朱雀門周辺) [12] S.K. Nayar and S. Baker: \Catadioptric image formation", Proc. DARPA Image Understanding Workshop, Vol.2, pp.1431-1437, May 1997. のウォークスルー 5 [13] おわりに 複合現実感のための実環境入力系として、ビデオ レートで側方視野 360 度の 1 点中心投影像を取得可 PRMU97-118, Oct. 1997. 能な 3 種類の全方位画像センサを紹介し 、それらを [14] 用いた実環境仮想化の例として、テレプレゼンスシ ステムと没入型複合現実空間構築を示した。全方位 mura, and N. Yokoya: \Generation of high- resolution stereo panoramic images by omnidi- 条件をすべて満たす実用的なセンサの開発にはまだ rectional imaging sensor using hexagonal pyra- Proc. 14th IAPR Int. Conf. on Pattern Recognition, Vol.I, pp.485-489, Aug. 到っていない。また、応用事例でも、テレプレゼン midal mirrors", スにおける立体視化 [21] 、広域屋外情景のアーカイ 1998. ブと仮想化等、残されている課題がいくつかある。 [16] 参考文献 山澤, 尾上, 横矢, 竹村: \全方位画像からの視線 追従型実時間画像生成によるテレプレゼンス", 電 子情報通信学会論文誌 (D-II), Vol.J81-D-II, No.5, pp.880-887, May 1998. 田村, 大田: \複合現実感", 映像情報メディア学会 誌, Vol.52, No.3, pp.266-272, Mar. 1998. [17] Y. Onoe, K. Yamazawa, H. Takemura, and N. Yokoya: Mixed Reality | Merging Real and Virtual Worlds, Ohmsha- Computer Vision and Image Understanding, Vol.71, No.2, pp.154-165, Aug. 1998. [18] G. Wolberg: Digital Image Warping, IEEE tional video streams", Springer Verlag, Tokyo, Mar. 1999. [3] T. Kanade, P. Rander, and P.J. Narayanan: reality: Constructing worlds from real scenes", virtual IEEE Multimedia, Computer Society Press, Los Alamitos, CA, 1990. Vol.4, No.1, pp.34-47, Jan. 1997. [19] P. Milgram and F. Kishino: [4] S.E. Chen: \QuickTime VR | An image-based \A taxonomy of mixed reality visual display", Information & Systems, approach to virtual environment navigation", Proc. SIGGRAPH'95, pp.29-38, Aug. 1995. IEICE Trans. Vol.E77-D, No.12, pp.1321-1329, Dec. 1994. [5] J.Y. Zheng and S. Tsuji: \Panoramic represen- Proc. 10th IAPR Int. Conf. on Pattern Recognition, tation of scenes for route understanding", [20] 島村, 山澤, 竹村, 横矢: \全周実画像と CG モデル の合成による仮想環境の構成と提示", 電子情報通 信学会 パターン認識・メディア理解研究会, 信学 技報 PRMU99-59, July 1999. [21] 山口, 山澤, 竹村, 横矢: \全方位動画像を用いた任 意方向両眼ステレオ画像の実時間生成と提示", 電 子情報通信学会 パターン認識・メディア理解研究 会, Nov. 1999 (発表予定). Vol.I, pp.161-167, June 1990. Jopurnal of Optical Society of America, Vol.54, No.8, pp.1060- [6] K. Miyamoto: \Fish eye lens", 1061, Aug. 1964. [7] Y. Yagi, S. Kawato, and S. Tsuji: \Telepresence by real-time view- dependent image generation from omnidirec- [2] Y. Ohta and H. Tamura (Eds.): \Virtualized 横矢, 山澤, 竹村: \複合双曲面ミラーを用いた全方 位ステレオ画像センサ", 1997 年電子情報通信学会 総合大会講演論文集, No.D-12-145, Mar. 1997. [15] T. Kawanishi, K. Yamazawa, H. Iwasa, H. Take- センサに関しては、1 章で述べた (a) 〜 (e) の 5 つの [1] 川西, 山澤, 岩佐, 竹村, 横矢: \六角錐ミラーを 用いた全方位ステレオ画像センサによる高解像度 ステレオパノラマ動画像の作成", 電子情報通信学 会 パターン認識・メディア理解研究会, 信学技報 \Real- time omnidirectional image sensor (COPIS) 8
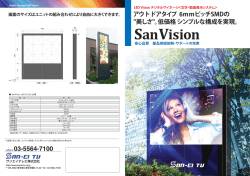
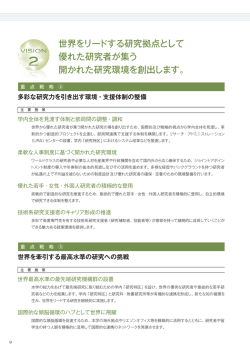
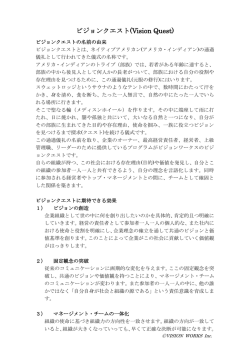
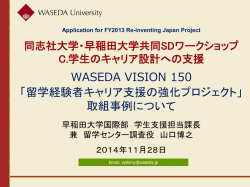
© Copyright 2026 Paperzz