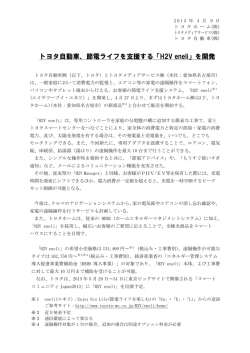
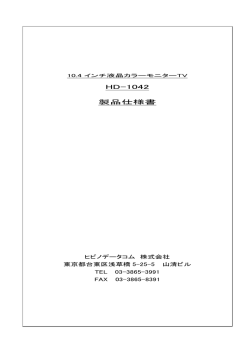
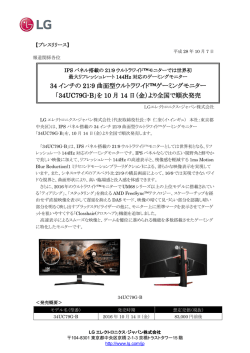
2A05 民間宇宙機開発におけるUAV活用事例 ○緒川修治、竹内玲司(PDエアロスペース)、満武勝嗣(ゼノクロス) UAVs as experimental planes and applications in a development phase of commercial space vehicles Shuji Ogawa, Reiji Takeuchi (PD AeroSpace), Katsushi Mitsutake (XENOCROSS) Key Words: Space Venture, UAV, Remotely Piloted Aircraft (RPA), FPV/OSD, Flying Test Bed (FTB) Abstract To use UAVs is a useful way in a development phase of airplanes and space vehicles. Its advantage is not only to produce or procure parts and to handle them easier, but also to reduce development costs and personal accident's risks compared to use manned systems. This paper introduces our experimental planes in a development phase of a manned suborbital space plane. These are radio controlled UAVs or RPAs which are planned to operate out of sight using FPV/OSD system. The first target of flight distance is 1km and the second target is 5km. 1.序論 へのアプローチは、滑空およびジェット再着火によ 近年、宇宙は開発する時代から利用する時代へと り行う。(図2) エンジン停止から頂点に達し、自 移り始め、民間企業、殊にベンチャー企業が積極的 由落下して成層圏下層(高度約 20km)に到達/リエ に宇宙ビジネスに参入し、従来に無い発想、スピー ントリーするまでの3~4分間が無重量状態となる。 ドで革新的な変化を起こしている。宇宙輸送系では、 到達高度が高くなれば、無重量時間が長くなる。 今年 5 月には米 SpaceX 社が独自にロケットと宇宙船 を開発し、国際宇宙ステーションにドッキングさせ ることに成功した。同じく米ベンチャーの Scaled Composites 社/Virgin Galactic 社は、宇宙旅行用の弾 道宇宙機の開発を行っており、まもなく商業宇宙旅 行を開始する計画である。彼らの宇宙機は、航空機 形態の母機に有翼ロケットである子機を搭載し、上 空で分離/空中発射する方法を取る(図 1) 。 図1 White Night Two と Space Ship Two (中央) 図2 弾道宇宙旅行の飛行プロファイル 弾道宇宙旅行の飛行プロファイルは、空港から滑 走離陸し、ジェット燃焼により高度 15km 程度まで 筆者らも、米国に比べて規模は小さいが、航空機 上昇。そこからロケット燃焼により高度約 50km ま 形態の弾道宇宙機を開発しているベンチャーである。 で垂直上昇し、エンジン停止させる。この時の速度 現段階は、エンジンを含め各要素技術の開発フェー は約マッハ4。慣性により機体は高度 100km 超に到 ズにあり、数種の無人実験機による飛行テストを行 達し、あとは重力により自由落下する。空港(着陸) っている。本稿では、筆者らの宇宙機開発/ビジネ スの概要と、これら無人機の開発状況を紹介する。 ビス提供。弾道飛行用と水平飛行用では、飛行プロ ファイルが異なる為、機体の仕様も異なる。 2.宇宙機開発計画概要 先行する米ベンチャーは、有人機開発において、 米 Virgin Galactic 社の弾道宇宙旅行は、2014 年に 直接有人の試作機を製作し、有人実機による飛行テ サービスインされる見込みである。筆者らは、これ ストを行っている。これは、資本力が有り、飛行テ に遅れること 5 年以内での実現を目指している。機 ストの環境が整っているから出来ることである。我 体の形態は、翼を持った航空機形態である。 (図3) が国では事情が大きく異なり、同様の動きを取るこ 最大の特徴は、エアーブリージングによるジェット とは比所運に困難である。そこで、小型の無人機を 燃焼モードと、搭載酸化剤によるロケット燃焼モー 用いることで、開発コストの抑制や人的被害のリス ドとを任意に切り替え可能なエンジン(開発中)を有 ク回避を狙うこととなる。 することである。これにより、他社のように機体を 小型であることは、部品調達や機体の取り回しに 2種類持ち、かつ各機体を分離・接合する必要はな おいて有益である。個々の部品も小さいために、材 くなり(システムが簡素化され) 、製造および運用コ 料や加工コストを抑制できる。また重量も抑えられ ストの低減と信頼性向上が可能となる。 るので、分解/組み立て作業や、搬送が容易になる。 これらは開発期間を短くすることにも有利に働く。 ただし、実運用当たって、機体を大型化する必要が 出てきた場合は、機体サイズによって、構造設計変 更は必要となる。 無人であっても、空力特性を始めとするシステム 全体や各種機器の機能確認など、技術的検証の殆ど は有人機と同様の試験が実施可能である。有人では 実施が不可能な限界試験も行うことができる。今年 8 月、米空軍と米航空宇宙局(NASA)、ボーイング社、 プラットアンドホイットニーロケットダイン社によ 図3 機体イメージ(有人機) ってマッハ5を目標としたスクラムジェットエンジ ンの飛行実験が全長 7.6m の無人機(図4)を用いて 宇宙旅行を中心とした有人宇宙機の事業に先立ち、 無人機による事業も計画している。無人機の事業は 実施されたが、このような極限試験は無人機の活用 領域といえる。 大きく2つを検討している。一つは、高度 100km へ の弾道飛行の過程で生じる分単位の微小重量環境の 利用および高高度の大気/気象観測事業である。も う一つは、飛行高度は数 km 以下で水平方向に広域 を飛行し、地上や上空の観測・情報収集を行う事業 である。即応性、機動性、酷所適合性など宇宙機と して開発された機体の特徴を活かした運用を視野に 入れている。 現在は開発フェーズにあり、大学、研究機関や民 間企業などと連携し、エンジンを始め各要素技術の 開発を行っている。 3.無人機の位置づけ 無人機は、以下の2つフェーズで利用する。 図4 無人極超音速実験機:X-51 一方、無人機を用いるに当たっては、制御方法が 最重要の検討項目となる。人間が搭乗している場合 利用1) 開発フェーズにおける要素部品、装置の機 は、機体に生じた様々な現象をコックピットの計器 上/空中でのテスト機会の提供、いわゆるフライン 表示に加えて、自らの五感を通じて得た感覚で、総 グテストベッドとしての利用。 合的に判断できるが、無人の場合は備え付けられた 利用2) 運用フェーズにおいて、高高度弾道飛行お センサーから得られる情報のみで判断しなければな よび水平飛行での情報収集を中心とした多目的サー らない。センサーの種類、数を増やし、センサー精 度を上げることで、得られる情報を拡充することは 可能であるが際限がなく、重量やコストの面からも 非合理であり、適切な妥協点が求められる。 具体的な制御方法としては、完全に自律制御させ る方法と、ラジコンのように遠隔で制御(操縦)す る方法がある。完全自律飛行(ウェイポイント飛行) の場合は、機体が独立して飛行できる(電波の縛り を受けないで飛行できる)反面、正確な判断を行う のに精度、信頼性の高い、高価なセンサーが必要と なる。また飛行に際し、予め飛行ルートなどをプロ 図5 FPV/OSD モニタ画像(イメージ) グラミングする必要がある。遠隔操縦は、基本的に パ イ ロ ッ ト が 操 縦 す る ( RPA : Remotely Piloted Aircraft)ため、事前の飛行ルートのプログラミング 4.開発中の小型無人機 これまで製作してきた機体と現在計画中の機体を は必要なく、緊急時の即応性や現場の変化に対する 示す。 柔軟性やロバスト性に優れるなどの利点がある。ま X01 デモ機 た自動制御機能を有したとしても、操縦を補助する ベンチャーによる宇宙機開発事業の PR を狙い、 機能に絞れるので、高価なセンサーは不要となり、 デモンストレーションを目的とした機体。(表1/ 全体としては安価なシステムとなる。ただし、絶え 図6) 機体、エンジンとも自作/オリジナル。ガソ ず地上局との交信が必要となり、電波/通信の縛り リンを燃料とするパルスジェットエンジンを機体下 を受ける。遠隔操縦の簡便な方法として、目視によ 部に2基搭載している。燃料ポンプ出力をコントロ るラジコン制御があるが、地上からの視認距離範囲 ールすることで若干のスロットル制御が可能。動翼 --- 機体の大きさに依存するが全長2~3mの機体 は左右主翼のフラッペロンのみ。エアデータの収集 で、おおよそ300m~500m --- であるため、 機能を備えていないため、正確な性能は取得できて 高高度や高速での試験などは実施できず、実施項目 いないが、高度数十 m、速度 80km/h 程度で飛行を行 が限られる。 った。 これらの状況を踏まえて、筆者らは、開発実験に おいては、飛行条件の変更や外乱に対する柔軟性、 ロバスト性が重要と判断。加えて、コスト面も考慮 して、遠隔操縦方式を選択、視認距離範囲を超えて 飛行させるために FPV/OSD 機能を持たせることと した。 FPV は、First-Person View の略であり、一人称ビュ ーと訳される。機体にカメラを搭載し、パイロット 視点でのリアルタイムでの動画映像を得るものであ 表1 全長 全幅 空虚重量 全備重量 動力 速度 max 制御 PDAS-X02 機体諸元 1475 mm 1547 mm 6.4 kg 7.6 kg パルスジェットエンジン×2基(4kgf) 80km/h (推定) 2.4GHz/4ch ラジコン る。他方の OSD は、Onboard Screen Display の略であ り、各種センサー情報を画像に統合することを意味 する。FPV によるパイロット視点の映像に、高度や 速度、姿勢などの飛行状態に関する情報に加えて、 燃料残量やエンジン回転数など機体の状態に関する 情報をカメラ映像に重ね合わせ(スーパーインポー ズ)、地上局のモニタに映し出す。いわゆるHUD (Head Up Display)と同じ状態を作ることで、パイロッ トは、モニタ映像で機体の状態を把握し、操縦する 図6 PDAS-X01 デモ機 ことが出来る。モニタには、機体情報の他に、マッ プ情報、方位(ヘディング)情報などを表示させ、 パイロットの要求に合わせて、カスタマイズする。 (図5) X02 フライングテストベッド 高高度、高速飛行実験用の機体。 (図7/表2) 市販(ラジコン用)の機体をベースに、各部を改造 している。基本素材は GFRP で、ガスタービンエン インポーズし、NTSCコンポジット信号に変換し ジンを胴体内部に搭載している。エルロン、フラッ て送信する。これを地上局で受信し、モニタに表示 プ、ラダー、スタビレータを有する。飛行中のエア させる。 (図5) データを取得可能。機体上部(垂直尾翼間部)にマ ウントを設けてあり、テスト/評価用のエンジンを 外部搭載することが出来る。 現在は、目視によるラジコン制御であるが、将来 的には FPV/OSD システムおよび自律飛行システム を搭載する予定である。 表2 全長 全幅 全備重量 動力 速度 max 制御 PDAS-X02 機体諸元 表3 全長 全幅 全備重量 動力 速度 max 制御 3050 mm 2150 mm 30.8 kg (26.3 kg + 4.5kg/燃料) ガスタービンエンジン×1基(23kgf) 255km/h 2.4GHz/12ch ラジコン 図8 PDAS-X03 機体諸元 1330 mm 2770 mm 6.4 kg 電動モータ×1基(900W/1400W) 約 120km/h 2.4GHz/4ch ラジコン FPV/OSD PDAS-X03 FPV/OSD システム実証機 本機では、画像送信遅れ、操舵信号遅れなどが、 どの程度操縦を困難にするかを検証することが目的 としている。撮影範囲(パイロット視野)も課題に 図7 PDAS-X02 フライングテストベッド なお、本機は、FTBとして、ほぼ完成しており、 今後、各種ニーズに合わせてサービス運用させる予 定である。 X03 遠隔操縦システム実証機(その1) FPV/OSD 機能を実証する機体。 (表3/図8) ベ ース機は、市販の電動ラジコン機で、補機類搭載に よる重量増を補う為、高出力モータを採用した。カ メラ映像の送信には、1281.5MHz、出力 1W の送受 信機を使用する。本周波数帯の使用においては、無 線従事者免許(第 3 級陸上特殊無線技士)と無線局 免許が必要である。本機搭載の送受信機は、映像電 波の送達可能距離 5km を有するが、まずは行動半径 1km の飛行を目標とする。 FPV/OSD のシステム構成図/機上側と地上側を 図9に示す。電波送受信は、①操舵(ラジコン)、② 映像(FPV/OSD)の2系統を有する。機上カメラで 撮影した動画映像に、各種センサー情報をスーパー なると考えており、随時課題を抽出し、改良を加え ていく計画である。 【機上側】 【地上側】 図11 飛行制御システムの切り替え 5.今後の開発項目と課題 FPV/OSD システムは、現在開発中であり、実施に 当たっては様々な課題が発生すると思われる。想定 される課題を列記する。 図9 FPV/OSD システム構成図 1) 画像送信遅れ、操舵信号送信遅れによる飛行安 定保持/操縦不良 X04 遠隔操縦システム実証機(その2) X03 の結果を基に、行動半径を伸ばすことを目的 2) パイロット視野の確保 3) 電波送信距離限界(操舵、映像、データ通信) とした機体。(表4/図10)映像送信限界の 5km 4) 完全ノーコン時の墜落防止機能の確保 範囲の飛行を目指す。FPV/OSD 機能に加えて、モニ 5) 飛行領域(テスト環境)の確保 タ画像による遠隔操縦の飛行支援を行うために、自 律飛行システムを併用させる。自律飛行システムは 無人機で使用できる無線通信範囲は厳しく制限さ 映像の乱れや操舵信号の送達不良など FPV/OSD に れており、技術的課題とは別の課題を有する。これ よる遠隔操縦が困難になった場合に、ホーム(地上 らの制限を回避し、実用要求をみたすシステムをい 局)へ戻すバックアップ機能としても活用する。 (図 かに低コストで開発/量産化できるか、同時にサー 11) 遠隔操縦と自律飛行の切替は、操舵系、映像 ビス運用における認可を得ることが今後の課題であ 系とは別系統の電波にて、地上局からコマンドを送 る。 ることで行う。このため、電波送受信には、3 つ目 の③航法系統(データ通信用)を追加する。 6.まとめ 宇宙機開発に限らず、開発費の抑制や開発環境の 表4 PDAS-X04 機体諸元 全長 全幅 空虚重量 離陸最大重量 動力 速度 制御 2270 mm 3300 mm 10 kg 21.5 kg 2 スト 28cc レシプロエンジン (25hp) 巡航 80 km/h、最大 130km/h 2.4GHz/10ch ラジコン FPV/OSD + 自律飛行(*1) *1 ゼノクロス社製 確保、人的被害のリスク回避など、開発ツールとし て無人機は有効な手段と考える。一方で、無人機な らではの問題として電波の取り扱いがある。法的な 問題である為、解決には時間を有すると思われるが、 有用な成果を出すことで、少しでも規制緩和の動き へと繋げたい。 国内では厳しいと言われる民間での宇宙機開発プ ロジェクトの成功に向けて、微力ではあるが、今後 も全力を尽くしていきたい。関係各位のご協力、ご 指導を切にお願いしたい。 本プロジェクトにおいて、電波/通信の技術、情 報に関して、大江空撮 大江氏に数多くの助言を頂い た。ここに感謝の意を表する。なお、遠隔操縦シス テム実証機(その1、その2)の開発は、愛知県の 「産業空洞化対策減税基金」に基づく平成 24 年度 新あいち創造研究開発補助金を活用している。 © UAV Factory Ltd., 図10 PDAS-X04 ロングレンジ遠隔操縦システム実証機 参考文献 1) http://ja.wikipedia.org/wiki/スペースシップツー 2) http://ja.wikipedia.org/wiki/X-51 3) 米本浩一, 船津勝也, 廣木侑, 加治茂, 志田至:有 翼ロケット開発実験に向けた予備飛行実験状況, 日 本航空宇宙学会誌, 第 56 巻, 第 648 号, 2008, pp.8-13 4) Phillip M.Marine, Osamah A.Rawashdeh: A First-Person View System for Remotely Operated Vehicles Using a Fisheye-Lens, AIAA Infotech @Aerospace 2010, AIAA 2010-3513 5) 中村晋, ホビー&産業用ラジコンの無線技術,法 規 制 と 電 波 伝 搬 , 2011, R F / ワ ー ル ド No.16, pp.92-106
© Copyright 2026 Paperzz