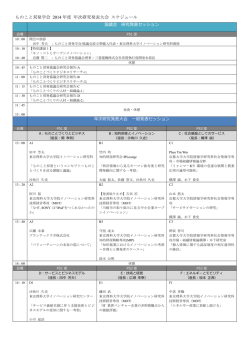
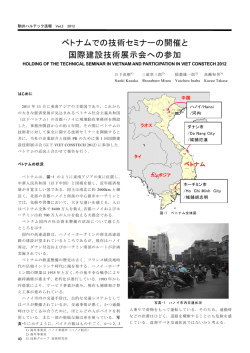
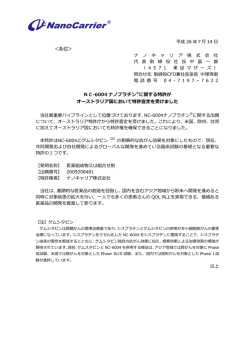
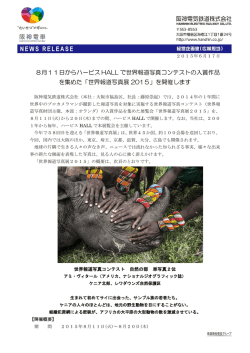
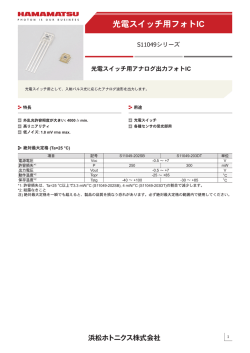
スピード・コントローラ 4-象限PWM PCを介して設定 組み合わせ: DCマイクロモータ ブラシレスDCサーボモータ シリーズ SC 5008 UP Umot Idauer Imax Iel max エレクトロニックの供給電源 モータの供給電源 最大連続出力電流 1) 最大ピーク出力電流 合計スタンバイ電流 入力/出力(部分的に自由に設定可能) 締め付けトルクは、 ターミナルストリップ 重さ PWM スイッチング周波数 効率 速度範囲: ‒ BLモータ・ホールセンサ付き (デジタル) ‒ BLモータ・ホールセンサ付き (アナログ) ‒ BLモータ·絶対値エンコーダ付き ‒ BLモータ·デジタルホール付き+エンコーダ ‒ DCモータ・エンコーダ付き スキャン率 DCモータのエンコーダの解像度 fPWM K 動作温度範囲 保管温度 1) SC 5008 S 6 ... 50 0 ... 50 8 16 100 5 V DC V DC A A mA 0,5 ... 0,6 160 96 (24) 95 Nm g kHz % 500 ... 100 000 50 ... 60 000 50 ... 60 000 50 ... 30 000 100 ... 30 000 500 / 1 000 65 535 rpm rpm rpm rpm rpm μs inc./rev. – 25 ... + 60 – 25 ... + 85 °C °C 周囲温度22° C時 バージョン バージョン スピード・コントローラ SC 5008 S SC 5008 S SC 5008 S SC 5008 S SC 5008 S SC 5008 S 1) オプション モータ 3530 3531 4289 3980 4475 4476 タイプ BL DC BL BL BL BL センサータイプ 速度値設定仕様1) ホールセンサー (デジタル) 3) インクリメンタルエンコーダ 2) アブソリュートエンコーダ 3) アブソリュートエンコーダー 4) デジタルホール+エンコード 3 デジタルホール+ブレーキイネーブル 3) 0 ... 10 V 0 ... 10 V 0 ... 10 V 0 ... 10 V 0 ... 10 V 0 ... 10 V Unsoll =10 V時 の速度 20 000 rpm 10 000 rpm 20 000 rpm 20 000 rpm 20 000 rpm 20 000 rpm パーツ番号 6500.01480 6500.01482 6500.01484 6500.01529 6500.01525 6500.01527 速度範囲は、 ソフトウェアによって設定することができます。PWMバージョンと他の構成は要請によりご利用いただけます。 2) プリセット値は512パルスです 3) 工場設定は2極モータ用です。4極モータで動作させるにはスピードコントローラをソフトウェア ファールハーバのモーションマネージャ で再設定する必要があります。 アクセサリー モータ タイプ ドライブ・エレクトロ ニクス プログラミング・アダプタ プログラミング・アダプタ モータ・コネクタ・アダプタ エンコーダ・アダプタ 技術データの注釈および性能、寿命等は、 本誌「技術情報」 を参照下さい。Edition 2012 – 2013 スターターキット 5 mm » 2,54 mm BX4 IE2 HEDS 412 BL DC DC SC 5008 S用 パーツ番号 6501.00088 6501.00096 6501.00087 6501.00086 6501.00063 6501.00001 © DR. FRITZ FAULHABER GMBH & CO. KG 仕様は予告なしに変更されることがあります。www.faulhaber.com SC 5008 S の寸法図および接続情報 縮小図 (5x) ø3,5 (4x) 3,6 8 接続 ピン 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 9 RM 5 40 50 58 16 1 3 ±0,2 18 50 65 機能 UP Umot GND Unsoll DIR FG IO 2 IO 1 Mot C Mot B Mot A SGND VCC Sens C Sens B Sens A ドライブ・エレクトロ ニクス 22 ±0,3 技術データの注釈および性能、寿命等は、 本誌「技術情報」 を参照下さい。Edition 2012 – 2013 413 © DR. FRITZ FAULHABER GMBH & CO. KG 仕様は予告なしに変更されることがあります。www.faulhaber.com SC の機能 接続の説明(モータに依存) 接続“MOT“、“MOT B“、“MOT“ C: – モータ接続 Mot A Mot B Mot C 接続“Sens A”、“Sens B”、“Sens C”: – センサ入力 Sens A Sens B Sens C f 接続“IO1”、“IO2”: – ロジック入力 IO1 IO2 エンコーダ付き DC-モータ ホールセンサ付き BL-モータ アブソリュートエン コーダ付き BL-モータ デジタルホール デジタルホール センサとエンコーダ センサー付き 付き BL-モータ +ブレーキの有効/ 付BL-モータ モータ + モータ 予約 A相 B相 C相 A相 B相 C相 A相 B相 C相 A相 B相 C相 予約 ホールセンサ A ホールセンサ B ホールセンサ C データ CS CLK ホールセンサ A ホールセンサ B ホールセンサ C ホールセンサ A ホールセンサ B ホールセンサ C 予約 予約 予約 予約 エンコーダ B エンコーダ A ブレーキ 有効 エンコーダチャンネル A エンコーダチャンネル B 400 kHz 予約 予約 接続情報(一般) 接続 “UP”: UP 電源電子 接続 “Umot”: Umot 電源、モータコイル 接続 “GND”: 接続 “Unsoll”: – アナログ入力 – デジタル入力 グラウンド 設定速度値 設定速度値の PWM デューティ•サイクル 入力抵抗 信号レベルが PLC 信号レベルが TTL 接続 “DIR”: – デジタル入力 回転方向 入力抵抗 接続 “FG”: – 故障出力 – 周波数出力(BL モータのみ) 接続 “IO1“, “IO2”: – デジタル入力 6) 信号レベルが TTL (IO2) (IO1) ドライブ・エレクトロ ニクス 接続 “VCC ”: 出力電圧 最大出力電流 3) Uin = 0 ... 10 V / > 10 V ... 最大 UP 1) Uin < 0.15 V Uin > 0.3 V (0.5 V) 2) 500 ... 18000 Hz d = 0% d = 50% d = 100% Rin 5 kΩ 7.5 ... Up 0 ... 2 2.8 ... Up 0 ... 0.5 (標準バージョン) モータ停止 モーター起動 グランドまたはレベル < 0.5 V レベル > 3.0 V Rin 10 kΩ マックス UP / 15 mA グランドへ接続 1, 3, 6, 8, 16 5) 反時計回り 時計回り プルアップ抵抗付オープンコレクタ 4) エラーなし 回転あたりのパルス n.c. 予約 2.8 ... Up 0 ... 0.5 高い 低い 高い 低い 高い 低い モーター有効 モーター無効 モータ停止 モーター起動 5 V DC SC 1801 S, F, P SC 2402 P SC 2804 S SC 5004 P SC 5008 S 外用 » ICC = 25 mA » ICC = 20 mA » ICC = 30 mA » ICC = 100 mA » ICC = 100 mA 信号用接地 接続 “SGND“: 1) 2) 3) 4) 5) 6) モータ停止 最高速度の半分 最高速度 高い 低い 高い 低い > 設定した速度値の > 10 V が定義されていません。 括弧内のデータは、センサーなしで BL モータの動作に適用されます。 SC5004/SC5008 は使用できません 22 kΩ(SC1801、SC2402、SC2804) 47 kΩ(SC5004、SC5008) 追加の外部プルアップ抵抗は、立ち上がり時間を改善するために追加することができます。 注意:最大出力 Iout 15 ミリアンペアを超えてはなりません。 値は、2 極モーターに適用されます。4 極モータでは2倍になります。 適切なハードウェアが必要。 技術データの注釈および性能、寿命等は、 本誌「技術情報」 を参照下さい。Edition 2012 – 2013 414 © DR. FRITZ FAULHABER GMBH & CO. KG 仕様は予告なしに変更されることがあります。www.faulhaber.com 回路図 ‒ ホールセンサ付きブラシレス (オプション3530) デジタル出力 FG 電子供給 モータ電源 Umot UP 22k 保護機能: 過温度 n soll PI-速度コント Ua ローラ 設定値の入力 0 ... 10 V A相 Phase A Phase B B相 Phase C C相 MOSFET パワーア ンプ Unsoll ϕ(t) 速度の計算 回転方向入力 マイクロコント ローラの 3 相 PWM ブロック DIR Hallsensor AA ホールセンサ Hallsensor BB ホールセンサ ホールセンサ Hallsensor CC 電機子の位置 の計算 評価回転方向 I2t-電流制限 I ist 5 V-コントロール RS マイクロコントローラ BL モーター GND Vcc +5V SGND 電源ユニット接続図 設定 完全なドライブ 制御操作 プログラミング•アダプタ (オプション) 速度制御器 (IO 1) Mot C (IO 2) Mot B FG DIR Unsoll z.B. 0 ...10 V z.B. 5 ...18 V GND Umot 12 V UP 12 V パラメータ Umot 経由して 回転コントローラ SC 1801 SC 2402 SC 2804 SC 5004 SC 5008 Mot A SGND VCC Sens C Sens B Sens A パラメータ Unsoll 経由して 回転セットポイントの仕様 エンコーダ付DCマイクロモータの接続図 (IO 1) Mot C (IO 2) Mot B モータ ‒ Motor – Mot A モータ + Motor + SGND GND VCC (サプライ) +5V (Versorgung) Sens C チャンネル Kanal B B Sens B チャンネル Kanal AA FG DIR Unsoll GND Umot SC 1801 SC 2402 SC 2804 SC 5004 SC 5008 UP 技術データの注釈および性能、寿命等は、 本誌「技術情報」 を参照下さい。Edition 2012 – 2013 ドライブ・エレクトロ ニクス 速度制御器 DC-Motor エンコーダ付 DC モーター Sens A 415 © DR. FRITZ FAULHABER GMBH & CO. KG 仕様は予告なしに変更されることがあります。www.faulhaber.com ホールセンサ付き BL モーターの接続図 速度制御器 (IO 1) Mot C Phase C C相 (IO 2) Mot B Phase B B相 Mot A Phase A A相 SGND GND VCC (サプライ) +5V (Versorgung) Sens C Hall Hall CC C ホール Sens B Hall Hall BB B ホール Sens A Hall Hall A A A ホール FG DIR Unsoll GND Umot SC 1801 SC 2402 SC 2804 SC 5004 SC 5008 UP BL-Motor ホールセンサ付き BL-モーター デジタルホールセンサとエンコーダ付き BL モータの接続図 速度制御器 Channel Kanal B B Mot C Kanal A A Channel FG DIR Unsoll GND SC 2402 SC 2804 SC 5004 SC 5008 Phase C C相 デジタルホール BL-Motor センサとエンコー ダ IE2 付きの Mot B Phase B B相 Mot A Phase A A相 SGND GND VCC (Versorgung) +5V (サプライ) チャネル Kanal BB チャネル Kanal AA BL モーター Sens C ホール Hall CC Umot Sens B ホール Hall BB UP Sens A Hall AA ホール Brake ブレーキ Mot C Phase C C相 有効にする Enable Mot B Phase B B相 デジタルホールセンサとブレーキの有効付き BL モータの接続図 ドライブ・エレクトロ ニクス 速度制御器 SC 2402 SC 2804 SC 5004 SC 5008 Mot A Phase A A相 SGND GND VCC (サプライ) +5V (Versorgung) Sens C ホール Hall CC Umot Sens B ホール Hall BB UP Sens A ホール Hall AA 技術データの注釈および性能、寿命等は、 本誌「技術情報」 を参照下さい。Edition 2012 – 2013 416 FG DIR Unsoll 0 ...10 V 12 V GND デジタルホー BL-Motor ルセンサと BL-モーター © DR. FRITZ FAULHABER GMBH & CO. KG 仕様は予告なしに変更されることがあります。www.faulhaber.com AES付BLモータの接続図 速度控制器 (IO 1) Mot C Phase C C相 (IO 2) Mot B Phase B B相 Mot A Phase A A相 SGND GND VCC (Versorgung) +5V (サプライ) Sens C CLK Hall C Sens B CS Hall B Sens A データ DATA Hall A FG DIR Unsoll GND Umot SC 1801 SC 2402 SC 2804 SC 5004 SC 5008 UP 絶対値エン BL-Motor コーダ付き BL-モーター センサレス BL モーターとDCモータの動作接続図 速度制御器 (IO 1) Mot C (IO 2) Mot B Mot A FG DIR Unsoll GND SC 1801 SC 2402 SC 2804 Phase C C相 モータ ‒ Motor Motor モータ + – DC-Motor DC モーター Phase B B相 + センサレス Phase A A相 BL-Motor BL モーター センサレス SGND VCC Sens C Sens B UP Sens A ドライブ・エレクトロ ニクス Umot 技術データの注釈および性能、寿命等は、 本誌「技術情報」 を参照下さい。Edition 2012 – 2013 417 © DR. FRITZ FAULHABER GMBH & CO. KG 仕様は予告なしに変更されることがあります。www.faulhaber.com
© Copyright 2026 Paperzz