PRML §6 — kernel method
@taki0313
10/10/22
@taki0313
ToC
Introduction
6.1 双対表現
6.2 カーネル関数の構成
6.3 RBF ネットワーク
6.4 ガウス過程
@taki0313
1/50
Introduction
@§3 回帰 / @§4 分類 — linear, parametric
kernel function k(x, x′) = φ(x)T φ(x′)
–
–
–
–
ある特徴空間上での内積, 対称 k(x, x′) = k(x′, x)
恒等カーネル k(x, x′) = xTx′
不変カーネル k(x, x′) = k(x − x′)
均一カーネル k(x, x′) = k(||x − x′||)
kernel trick
– kernel を用いて特徴空間上でごにょごにょする技法
@taki0313
2/50
3/50
1
1
1
0.5
0.75
0.75
0
0.5
0.5
−0.5
0.25
0.25
−1
−1
0
1
1.0
0
−1
0
1
0
−1
2.0
6.0
1.0
3.0
0
1
0
1
0.0
−0.4
−1
0
1
0.0
−1
0
1
0.0
−1
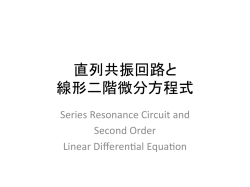
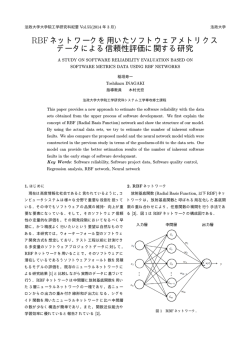
Figure 1: kernel と k(x,x’) を x’ を×として x の関数にしたもの
@taki0313
ToC
Introduction
6.1 双対表現
6.2 カーネル関数の構成
6.3 RBF ネットワーク
6.4 ガウス過程
@taki0313
4/50
双対表現 — dual representation
正則化項付き線形回帰の評価式
∑ T
1
– J(w) = 2 {w φ(xn) − tn }2 + λ2 wTw
– w についての勾配=0
∑ T
∑
1
w = − λ {w φ(xn)}φ(xn) =
an φ(xn) = ΦTa
– ΦT = (φ(x1) · · · φ(xN))
パラメータの変換 w a — w = ΦTa → J(w)
– J(a) = 12 aTΦΦTΦΦTa − aTΦΦTt + 12 tTt + λ2 aTΦΦTa
グラム行列 — Knm ≡ φ(xn)T φ(xm) = k(xn, xm)
@taki0313
5/50
双対表現 — dual representation
K を用いて
– K = ΦΦT
– J(a) = 12 aTKKa − aTKt + 12 tTt + λ2 aTKa
w = ΦTa を an の式に代入して
– λan + aTΦφ(xn) = tn → (λIN + K)a = t
予測の式
– y (x) = aTΦφ(x)
T
– y (x) = k(x) (K + λIN)−1t — k(x) = k(xn, x)
@taki0313
6/50
双対表現 — dual representation
7/50
kernel method — グラム行列 K(NxN) の逆行列を求める
基底関数 — 計画行列 Φ(MxM) の逆行列を求める
一般に…
– N >> M
– グラム行列の逆行列を求めるコストは大きい 全てをカーネ
ル k の上で行なえるのが嬉しいことらしい。
@taki0313
ToC
Introduction
6.1 双対表現
6.2 カーネル関数の構成
6.3 RBF ネットワーク
6.4 ガウス過程
@taki0313
8/50
カーネル関数の構成
カーネル関数 — 特徴空間上への写像 φ(x)
カーネル k が有効か? ある空間上での内積になること
– (xTz)2 √
= (x1z1 + x2z2)2√= x12z12 + 2x1z1x2z2 + x22z22
T
– = (x12, 2x1x2, x22)(z12, 2z1z2, z22)T = φ (x) φ (z)
カーネル k が有効か? グラム行列 K が半正定値行列
カーネルの構成法 — (6.13) ∼ (6.22)
@taki0313
9/50
カーネルの作り方
k(x, x′) = ck1(x, x′)
k(x, x′) = f (x)k1(x, x′)f (x′)
k(x, x′) = q(k1(x, x′))
k(x, x′) = exp(k1(x, x′))
k(x, x′) = k1(x, x′) + k2(x, x′)
k(x, x′) = k1(x, x′)k2(x, x′)
k(x, x′) = k3(φ(x), φ(x′))
k(x, x′) = xTAx
k(x, x′) = ka(xa, x′a) + kb (xb, x′b)
k(x, x′) = ka(xa, x′a)kb (xb, x′b)
@taki0313
10/50
– c は定数、f は任意の
関数
– q は非負の係数をも
つ多項式
– Φ : x → RM
– k3 は RM 上の kernel
– A は対称, 半正定値
– x = (xa, xb)
– ka, kb はそれぞれで
有効な kernel
有名なカーネル
ガウスカーネル k(x, x′) = exp(− 12 ||x − x′||2)
– ||x − x′||2 = xTx + (x′)Tx′ − 2xTx′
– カーネルトリック — → κ(x, x) + κ(x′, x′) − 2κ(x, x′)
シグモイドカーネル k(x, x′) = tanh(axTx′ + b)
@taki0313
11/50
確率的生成モデル → カーネル
生成モデル p(x) → k(x, x′) = p(x)p(x′)
一般化
∑
– 離散 — k(x, x ) = ∫ i p(x|i)p(x′|i)p(i)
– 連続 — k(x, x′) = p(x|z)p(x′|z)p(z)dz
′
HMM → §13
– よく知らないので…
∑
′
– k(X, X ) = Z p(X|Z)p(X′|Z)p(Z)
@taki0313
12/50
生成モデル → カーネル
parametric な生成モデル — p(x|θ)
フィッシャーカーネル
– フィッシャースコア — g(θ, x) = ∇θ ln p(x|θ)
– フィッシャー情報量行列 — F = Eθ [g(θ, x)g(θ, x)T ]
∑
1
g(θ, xn)g(θ, xn)T
近似 — F ∼ N
– フィッシャーカーネル
∗ k(x, x′) = g(θ, x)T F−1g(θ, x′)
∗ k(x, x′) = g(θ, x)T g(θ, x′)
@taki0313
13/50
ToC
Introduction
6.1 双対表現
6.2 カーネル関数の構成
6.3 RBF ネットワーク
6.4 ガウス過程
@taki0313
14/50
RBF network — Radial Basis Function
15/50
関数補間
– 入力集合 {x1, x2, · · · , xN, }{t1, t2, · · · , tN }
– 1 ≤ n ≤ N について f (xn ) = tn になる関数 f を求める
∑
– f (x) =
wn h(||x − xn||) として {wn } を最小二乗法で求める。
— 過学習
ノイズが入る場合の補間
– ノイズの分布 ν(ξ) — ∫確率変数 ξ
∑N
1
– 二乗誤差 E = 2 n=1 {y (xn + ξ) − tn }2ν(ξ)dξ
@taki0313
RBF network — Radial Basis Function
16/50
変分法による最適化
– Nadaraya-Watson Model.
∑
ν(x − xn)
– y (x) =
tn h(x − xn), h(x − xn) = ∑
ν(x − xn)
– 正則化 → 全ての関数が小さい値にならにように
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
−1
@taki0313
−0.5
0
0.5
1
0
−1
−0.5
0
0.5
1
6.3.1 Nadaraya-Watson Model
17/50
§3.3.3 — 新しい入力 x に対する予測を線形結合の式で行う
∑
– y (x, mN) =
k(x, xn)tn — 等価カーネル
– 和の制約を満たしている
回帰 密度推定
– 訓練集合 {xn, tn} → p(x, t) の推定 — Parzen 推定法 (§2.5.1)
∑
1
– p(x, t) = N f (x − xn, t − tn ) — 各要素を中心に持つ
∫∞
– 条件付き期待値
が良い∫ — y (x) = E[t|x] = −∞ tp(t|x)dt
∫
∑
tf (x − xn, t − tn )dt
tpdt
n
∫
∫
=∑
– E[t|x] =
pdt
m f (x − xm, t − tm )dt
@taki0313
6.3.1 Nadaraya-Watson Model
∫
∑ ∫
tpdt
tf (x − xn, t − tn )dt
n
y (x) = E[t|x] = ∫
=∑ ∫
pdt
m f (x − xm, t − tm )dt
∫
簡単化 — 各要素の平均は 0 — tf (x, t)dt = 0
変数置換 → Nadaraya-Watson Model
∑
∑
∑
– y (x) = ∫ n g (x − xn)tn / m g (x − xm) = n k(x, xn)tn
∞
– g (x) = −∞ f (x, t)dt
∑
– k(x, xn) = g (x − xn)/ m g (x − xm)
@taki0313
18/50
6.3.1 Nadaraya-Watson Model
条件付き確率分布— p(t|x) = p(t, x)/
∫
19/50
p(t, x)dt
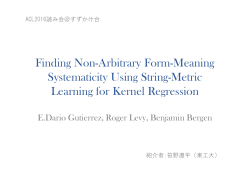
例 — 1 次元、f (x, t) ∼ N (0, σ 2), z = (x, t) の場合
• sin(緑)
1.5
1
• データ点 (青)
0.5
0
• 条件付き期待値 (赤)
−0.5
−1
−1.5
0
@taki0313
0.2
0.4
0.6
0.8
1
• 赤± 2 σ
ToC
Introduction
6.1 双対表現
6.2 カーネル関数の構成
6.3 RBF ネットワーク
6.4 ガウス過程
@taki0313
20/50
ガウス過程
21/50
確率過程
– 任意の有限な値集合 {y1, y2, · · · , yn } に対して矛盾のない同時
分布を与えるもの
– その同時分布がガウス分布 — ガウス過程
§6.1 回帰、双対性→カーネル — 非確率的モデル
確率的識別モデル + カーネル法 — ガウス過程
@taki0313
6.4.1 線形回帰の復習
線形回帰モデル y (x) = wT φ(x)
パラメータの事前分布 p(w) = N (w|0, α−1I )
入力 {x1, x2, · · · , xN} による評価
{y (x1), y (x2), · · · , y (xN)} による評価
→ {yn }, y = (y1, y2, · · · , yN )T を評価する
– E[y] = ΦE[w] = 0
– Cov [y] = ΦCov [wwT]ΦT = α1 ΦΦT = K
– Knm = k(xn, xm) = α1 φ(xn)Tφ(xm)
線形回帰はガウス過程の特殊な場合
@taki0313
22/50
ガウス過程
23/50
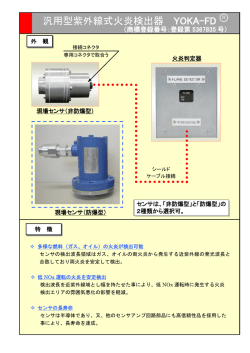
同時分布の性質が平均、共分散で完全に記述される
– 平均 (1 次モーメント) =0 とする = p(w|α) の平均を 0
– ガウス過程 ← カーネル関数 — E[y (xn), y (xm)] = k(xn, xm)
3
3
1.5
1.5
0
0
−1.5
−1.5
−3
−1
−0.5
0
0.5
1
−3
−1
−0.5
0
0.5
1
カーネル&ガウス過程から取り出した関数
@taki0313
カーネル関数の直接定義
24/50
′
図 (左) — ガウスカーネル k(x, x ) =
||x−x′||2
exp(− 2σ2 )
図 (右) — 指数カーネル k(x, x) = exp(−θ|x − x′|)
— オルンシュタイン-ウーレンベック過程
@taki0313
6.4.2 ガウス過程による回帰
25/50
ガウス分布のノイズを考える — tn = yn + εn
p(tn |yn ) = N (tn |yn , β −1)
データ y = (y1, · · · , yN )T と t = (t1, · · · , tN ) が与えられる
その同時分布が等方的ガウス分布になるとする (ガウス過程)
– p(t|y) = N (t|y, β −1IN)
– p(y) = N (y|0, K)
– K は xn , xm が似ていれば大きい値になる
実際の予測のための分布 p(t)
@taki0313
6.4.2 ガウス過程による回帰
実際の予測のための分布 p(t) を考える
∫
– p(t) = p(t|y)p(y)dy ∼ N (t|0, C)
– C(xn, xm) = k(xn, xm) + β −1δnm
– データとノイズが独立なので共分散を加えるだけでいい
回帰に使われるようなモデル
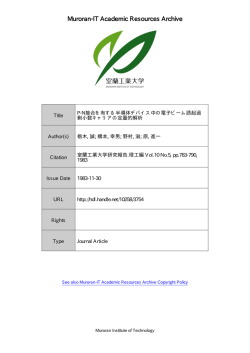
k(xn, xm) = θ0 exp{− θ21 ||xn − xm||2} + θ2 + θ3xT
n xm
— (θ0, θ1, θ2, θ3) 毎のプロット : 図 6.5
@taki0313
26/50
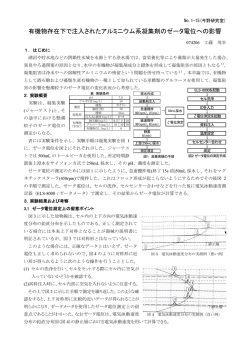
図 6.5 — 事前分布からのサンプル
(1.00, 4.00, 0.00, 0.00)
(9.00, 4.00, 0.00, 0.00)
(1.00, 64.00, 0.00, 0.00)
3
9
3
1.5
4.5
1.5
0
0
0
−1.5
−4.5
−1.5
−3
−1
−0.5
0
0.5
1
−9
−1
(1.00, 0.25, 0.00, 0.00)
−0.5
0
0.5
1
−3
−1
9
4
1.5
4.5
2
0
0
0
−1.5
−4.5
−2
−0.5
0
0.5
1
−9
−1
−0.5
0
0.5
−0.5
0
0.5
1
(1.00, 4.00, 0.00, 5.00)
(1.00, 4.00, 10.00, 0.00)
3
−3
−1
@taki0313
27/50
1
−4
−1
−0.5
0
0.5
1
図 6.6 — 同時分布からのサンプル
ガウス過程の事前分布から
サンプリングされた関数 f
3
t
入力 {xn }
0
入力に対する {yn } (赤)
サンプル {tn }(緑)
−3
−1
@taki0313
28/50
0
x
1
– ノイズ入り
6.4.2 ガウス過程による回帰
これまで — ガウス過程の視点からの同時分布のモデル化
新しい入力に対する予測が必要
–
–
–
–
–
訓練集合 {x1, · · · , xN}, t = (t1, · · · , tN )T
入力 xN+1 , その予測値 tN+1
予測分布 p(tN+1|tN)
同時分布 p(tN) を書き下す
tN+1 = (t1, · · · , tN , tN+1)T
@taki0313
29/50
予測分布
p(tN+1) = N (tN+1|0, CN+1) — (6.61) より
共分散行列の分割
(
)
CN k
— CN+1 =
— 正定値でなければならない
T
k c
— c = k(xN+1, xN+1) + β −1, k の要素は k(xn, xN+1)
2 章の結果から、条件付き分布 p(tN+1|t) は
1
– m(xN+1) = kTC−
N t
1
– σ 2(xN+1) = c − kTC−
N k
@taki0313
30/50
予測分布
31/50
事前分布&条件付き分布はガウス分布
予測分布の平均・分散も xN+1 に依存
t2
訓練/テストデータが 1 つずつ
1
• 楕円 — 同時分布 p(t1, t2)
m(x2 )
0
t1
• t1 — 訓練データ (青)
−1
• t1 に依存して p(t2|t1)(緑)
−1
@taki0313
0
1
予測分布
32/50
ガウス過程による回帰の例
• sin 関数 (緑)
• データ (右 3 つ以外, 青)
1
0.5
• ガウス過程による予測分布
の平均 (赤)
0
−0.5
−1
0
@taki0313
0.2
0.4
0.6
0.8
1
• 標準分布の 2 倍ぐらい (薄い
赤)
6.4.2 ガウス過程による回帰
33/50
K の固有値 λi → C の固有値 λi + β −1
– k(xn, xm) が ∀xn, xm に関して半正定値であればいい
予測分布の平均
∑
– m(xN+1) =
an k(xn, xN+1)
1
– an は C−
N t の n 番目の要素
– k が動径に依存するなら RBF が使える
計算量
– ガウス過程 NxN の逆行列 O(N 3) — 基底による回帰 O(M 3)
@taki0313
6.4.3 超パラメータの学習
34/50
予測が共分散の選び方にある程度依存する → parametric
ハイパーパラメータ θ → p(t|θ)
– θ の点推定, 共役勾配法
ガウス分布&ガウス過程では…
1
N
– ln p(t|θ) = − 12 ln |CN| − 12 tTC−
t
−
N
2 ln(2π)
−1 ∂ CN
1
1 T −1 ∂ CN −1
∂
ln
p(t|θ)
=
−
Tr
(C
)
+
– 勾配 — ∂θ
N ∂θi
2
2 t CN ∂θ CN t
i
i
一般には非凸関数で、近似的に解く。以下略
@taki0313
6.4.4 関連度自動決定
35/50
関連度自由決定 (ARD) — ニューラルネットから提案された何か
詳しくは §7.2.2
例 — 2 次元の入力空間 x = (x1, x2) をもつガウス過程
}
{ 1∑
′
′ 2
– カーネル k(x, x ) = θ0 exp − 2 ηi (xi − xi )
@taki0313
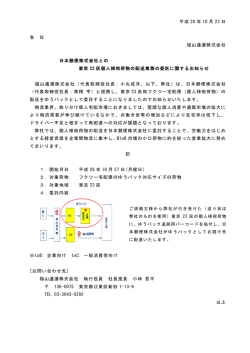
図 6.9 — ARD 事前分布からのサンプル
36/50
1
η1 = η2 = 1 (左)
0
η1 = 1, η2 = 0.01 (右)
−1
1
1
0
0
−1 −1
η は入力に対する敏感さ
1
ARD の文脈から出力の予測
にあまり寄与しない入力変
数を求められる。
0
−1
1
1
0
0
−1 −1
@taki0313
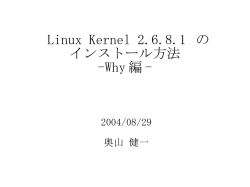
図 6.10 — ARD におけるηの変化
2
10
目標変数 t
0
10
−2
10
−4
10
0
20
40
60
80
3 次元の入力 x1, x2, x3
最適化 — 共役勾配法
@taki0313
100
–
–
–
–
x1:ガウス分布、100 個
x2 は x1+ノイズ
x3 はランダムなノイズ
sin(2πx1)+ノイズ
η1 > η2 >>>> η3
37/50
6.4.4 ARD
38/50
ARD → 指数・2 次カーネル
∑
∑
1
2
– k(xn, xm) = θ0 exp{− 2 ηi (xni − xmi ) } + θ2 + θ3 xni xmi
種々の応用において有用らしいカーネル
@taki0313
6.4.5 ガウス過程による分類
確率的な分類 → 事後確率 ∈ (0, 1)
ガウス過程 → 実数値全体 → 活性化関数 → 分類問題
2 クラス分類問題 t ∈ {0, 1}
–
–
–
–
関数 a(x) 上でのガウス過程を考える
y = σ(a) と変換する
y ∈ {0, 1} へ落とす
1 次元の例 — 図 6.11
@taki0313
39/50
図 6.11
40/50
10
• 上図
5
0
−5
−10
−1
−0.5
0
0.5
1
– a(x) に対するガウス過程
の事前分布からのサンプ
ル
1
• 下図
0.75
– ロジスティックシグモイ
ド関数で変換した
0.5
0.25
0
−1
@taki0313
−0.5
0
0.5
1
6.4.5 ガウス過程による分類
目標変数 t の確率分布 — ベルヌーイ分布
– p(t|a) = σ(a)t (1 − σ(a))1−t
入力の訓練集合 {x1, · · · , xN}
対応する目標変数の観測値 t = (t1, t2 · · · , tN )T
テスト点 xN+1 に対する tN+1 を予測
– 予測分布 p(tN+1|t) を決定する
– 要素 a(x1), · · · , a(xN+1) を持つベクトル aN+1
@taki0313
41/50
6.4.5 ガウス過程による分類
42/50
ベクトル aN+1 い対するガウス過程による事前分布
–
–
–
–
–
p(aN+1) = N (aN+1|0, CN+1)
正しいラベルが付いている → CN にはノイズが入ってない
正定値保証のためにパラメータ ν の項を入れる
C (xn, xm) = k(xn, xm) + νδnm
カーネルはパラメータ θ によって決まる
2 クラス分類 — p(tN+1 = 1|tN) を予測する
∫
– p(tN+1 = 1|tN) = p(tN+1 = 1|aN+1)p(aN+1|tN)daN+1
@taki0313
6.4.5 ガウス過程による分類
p(tN+1 = 1|tN) =
∫
p(tN+1 = 1|aN+1)p(aN+1|tN)daN+1
解析的に解けない
– 詳細略
– 漸近的にガウス分布に近づく
– どうやってガウス分布として近似するか
∗ 10.1 変分推論法
∗ 10.7 EP 法
∗ 6.4.6 ラプラス近似
@taki0313
43/50
6.4.6 ラプラス近似
ベイズの定理 & p(tN|aN+1, aN) = p(tN|aN) より
∫
p(aN+1|tN) =
p(aN+1, aN|tN)daN
∫
1
=
p(aN+1, aN)p(tN|aN+1, aN)daN
p(tN)
∫
1
p(aN+1|aN)p(aN)p(tN|aN)daN
=
p(tN)
∫
=
p(aN+1|aN)p(aN|tN)daN
@taki0313
44/50
6.4.6 ラプラス近似
45/50
条件付き分布 — (6.66), (6.67)
1
T −1
– p(aN+1|aN) = N (aN+1|kTC−
a
,
c
−
k
CN k)
N N
積分 → ラプラス近似 & ガウス分布の畳み込み
p(aN) — 平均 0, 共分散行列 CN であるガウス過程による
データについての項 (各々独立として…)
∏N
∏N antn
tn
1−tn
– p(tN|aN) = n=1 σ(an ) (1 − σ(an ))
= n=1 e σ(−an )
@taki0313
6.4.6 ラプラス近似
46/50
定数項を無視してラプラス近似
– Ψ(aN) = ln p(aN) + ln p(tN|aN)
∑N
N
1
1 T
T
= − 2 aNCNaN − 2 ln(2π) − 2 ln |CN| + tNaN − n=1 ln(1 + e an )
1
– ∇Ψ(aN) = tN − σN − C−
N aN
σN の要素は σ(an )
1
– ∇∇Ψ(aN) = −WN − C−
N
W は対角要素に σ(an )(1 − σ(an )) を持つ正定値行列
dσ
da = σ(1 − σ)(4.88)
正定値行列の和も正定値行列 (演習 6.24)
@taki0313
6.4.6 ラプラス近似
47/50
ヘッセ行列 A = −∇∇Ψ(aN) が正定値 — 事後分布 p(aN|tN ) の対
数が凸関数
凸関数 — 極小・極大 = 最小・最大
逐次更新で最適解を目指せる — Newton-Raphson medhot (4.92)
−1
– anew
=
C
(I
+
W
C
)
{tN−σN + WnaN}
N
N
N
N
– aN∗ に収束するまで — モード
– このとき aN∗ = CN(tN−σN)
1
収束時のヘッセ行列 H = −∇∇Ψ(aN) = WN + C−
N
@taki0313
6.4.6 ラプラス近似
収束時の、事後分布 p(aN|tN) のガウス分布による近似
– q(aN) = N (aN|a∗N, H−1)
2 つのガウス分布の畳み込み積分の評価 — 2 章
– E[aN+1|tN] = kT(tN − σN)
−1
– var [aN+1|tN] = c − kT(WN
+ CN)−1k
→ガウス分布の情報が得られたので…
@taki0313
48/50
6.4.6 ラプラス近似
共分散パラメータ θ の決定
– 尤度最大化, 最尤推定
∫
– 尤度関数 p(tN|θ) = p(tN|aN)p(aN|θ)daN
近似
1
N
– ln p(tN|θ) = Ψ(a∗N) − 12 ln |WN + C−
|
+
N
2 ln(2π)
Ψ(a∗N) = ln p(a∗N) + ln p(tN|a∗N)
θ の微分が CN と aN の二種類の項が表れる (以下略?)
@taki0313
49/50
6.4.7 ニューラルネットとの関係
ニューラルネット
– 隠れユニットの数 M を上手く調整すれば強い
– M → ∞ ガウス過程っぽい. ただし独立
– ニューラルネット — 隠れユニットの共有とが面白い
ガウス過程
– 共分散関数に性質が左右される
– 解析的に求められないところは近似
@taki0313
50/50
© Copyright 2026 Paperzz