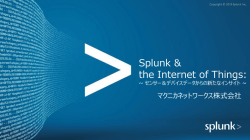
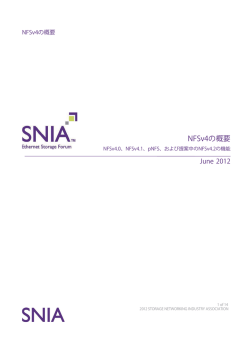
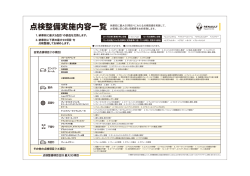
clustered Data ONTAP® 8.3 ハイアベイラビリティ構成ガイド ネットアップ株式会社 www.netapp.com/jp 部品番号: 215-09485_A0 作成日: 2015年3月 目次 | 3 目次 HAペアの概要 ............................................................................................... 7 HAペアとは ................................................................................................................. 7 HAペアによる無停止操作とフォールト トレランスのサポート .................................. 7 HAペアによるフォールト トレランスの強化 ................................................... 9 HAペアの接続とコンポーネント ............................................................................... 12 HAペアの種類の比較 .............................................................................................. 13 HAペアとクラスタの関係 .......................................................................................... 13 HAペアとMetroCluster構成の関係 ......................................................................... 16 2ノードのスイッチレス クラスタの場合 ..................................................................... 16 ミラーHAペアの概要 ................................................................................... 18 ミラーHAペアの利点 ................................................................................................ 18 非対称構成のミラー HAペア ................................................................................... 19 テイクオーバーとギブバックの概要 ............................................................ 20 テイクオーバーが発生する状況 .............................................................................. 20 フェイルオーバー イベントの原因 / 結果表 ................................................. 21 ハードウェア アシスト テイクオーバーによるテイクオーバー時間の短縮 ............. 25 テイクオーバー時の動作 ......................................................................................... 26 ギブバック時の動作 ................................................................................................. 27 テイクオーバー処理やギブバック処理に対するHAポリシーの影響 ..................... 28 テイクオーバーやギブバックに対するルートデータ パーティショニングの影響 .... 29 ディスク ファームウェアのバックグラウンド更新とテイクオーバー、ギブバッ ク、およびアグリゲートの再配置 ........................................................................ 30 ディスク所有権の種類 .............................................................................................. 31 ディスクおよびパーティションの所有権の表示 ........................................... 31 HAペアの計画 ............................................................................................. 33 HAペアのベストプラクティス .................................................................................... 33 HAペアの設定要件および制限事項 ....................................................................... 34 ミラーHAペアの設定要件および制限事項 ............................................................. 36 ハードウェア アシスト テイクオーバーの要件 ......................................................... 37 1組のHAペアで構成されるクラスタの場合 ............................................................ 37 HAペアに使用できるストレージ構成 ...................................................................... 38 4 | ハイアベイラビリティ構成ガイド エントリレベルおよびオールフラッシュFASストレージ システムにおけるルート データ パーティショニングの利点 ...................................................................... 39 ルートデータのパーティショニングの機能 ................................................... 39 ルートデータのパーティショニングの標準的なレイアウト .......................... 40 ルートデータのパーティショニングの使用に関する要件 ............................ 41 HAペアとストレージ システムのモデルの種類 ....................................................... 42 シングルシャーシとデュアルシャーシのHAペア ......................................... 42 HA構成を切り替え可能なシステムのインターコネクトのケーブル接続 ... 43 HA構成とHAの状態のPROM値 ................................................................. 43 ストレージ システム モデルと対応するHA構成 .......................................... 43 HAペアの設置とケーブル接続 .................................................................. 46 システム キャビネットまたは装置ラックの設置 ....................................................... 46 装置ラック型HAペア .................................................................................... 46 システム キャビネット型HAペア .................................................................. 47 必要なマニュアル ..................................................................................................... 47 必要な工具 ............................................................................................................... 48 必要な機器 ............................................................................................................... 49 装置の準備 ............................................................................................................... 50 装置ラックへのノードの設置 ........................................................................ 50 システム キャビネットへのノードの設置 ...................................................... 51 標準HAペアのケーブル接続 ................................................................................... 51 ファイバチャネル ディスク シェルフの接続に使用するファイバチャネル ポートの特定 ........................................................................................... 52 DS14mk2 ATまたはDS14mk4 FCディスク シェルフへのノードAのケー ブル接続 .................................................................................................. 53 DS14mk2 ATまたはDS14mk4 FCディスク シェルフへのノードBのケー ブル接続 .................................................................................................. 55 HAインターコネクトのケーブル接続(別々のシャーシに搭載された 32xxまたはFAS80xx以外のすべてのシステム) ................................... 57 HAインターコネクトのケーブル接続(別々のシャーシに搭載された 32xxシステム) ........................................................................................ 58 HAインターコネクトのケーブル接続(別々のシャーシに搭載された FAS80xxシステム) ................................................................................. 59 ミラーHAペアのケーブル接続 ................................................................................. 60 ファイバチャネル ディスク シェルフの接続に使用するファイバチャネル ポートの特定 ........................................................................................... 60 目次 | 5 ミラーHAペアのポート リストの作成 ............................................................ 61 チャネルAのDS14mk2 ATまたはDS14mk4 FCディスク シェルフ ルー プのケーブル接続 .................................................................................. 62 チャネルBのDS14mk2 ATまたはDS14mk4 FCディスク シェルフ ルー プのケーブル接続 .................................................................................. 65 各ループの冗長なマルチパスHA接続のケーブル接続 ............................ 69 HAインターコネクトのケーブル接続(別々のシャーシに搭載された 32xxまたはFAS80xx以外のすべてのシステム) ................................... 71 HAインターコネクトのケーブル接続(別々のシャーシに搭載された 32xxシステム) ........................................................................................ 72 HAインターコネクトのケーブル接続(別々のシャーシに搭載された FAS80xxシステム) ................................................................................. 72 標準またはミラーのHAペアで無停電電源装置を使用する場合に必要な接続 ... 73 HAペアの設定 ............................................................................................. 74 コントローラ モジュールとシャーシのHA状態の確認と設定 .................................. 74 HAモードの設定とストレージ フェイルオーバーの有効化 ..................................... 76 HAモードの設定用コマンド .......................................................................... 76 ストレージ フェイルオーバーの有効化および無効化用コマンド ................ 77 2ノード クラスタでのクラスタHAとスイッチレス クラスタの有効化 ......................... 77 HAペア構成の確認 .................................................................................................. 79 ハードウェア アシスト テイクオーバーの設定 ......................................................... 79 ハードウェア アシスト テイクオーバーの設定用コマンド ............................ 79 ハードウェア アシスト テイクオーバーをトリガーするイベント .................... 80 自動テイクオーバーの設定 ..................................................................................... 81 自動テイクオーバーの制御用コマンド ........................................................ 81 常に自動テイクオーバーが実行されるシステム イベント .......................... 82 自動ギブバックの設定 ............................................................................................. 82 自動ギブバックの仕組み ............................................................................. 82 自動ギブバックの設定用コマンド ................................................................ 83 storage failover modifyコマンドの設定による自動ギブバックに対する 影響 ......................................................................................................... 85 テイクオーバーとギブバックのテスト ....................................................................... 87 HAペアの監視 ............................................................................................. 90 HAペアの監視用コマンド ......................................................................................... 90 storage failover show-typeコマンドで表示されるノードの状態の説明 .................... 91 テイクオーバーを伴わないノードの停止またはリブート .......................... 104 6 | ハイアベイラビリティ構成ガイド テイクオーバーを開始せずにノードを停止またはリブートするコマンド ............... 104 2ノード クラスタでのテイクオーバーを伴わないノードの停止またはリブート ...... 105 手動テイクオーバーについて .................................................................... 107 手動テイクオーバーの実行および監視用コマンド ............................................... 107 テイクオーバーを手動で開始する場合のイプシロンの移動 ................................ 109 手動ギブバックについて ........................................................................... 111 ギブバックが中断された場合 ................................................................................. 111 ギブバックが拒否された場合 ................................................................................. 111 手動ギブバックの実行用コマンド .......................................................................... 113 HAペアのDS14mk2 ATまたはDS14mk4 FCディスク シェルフの管理 . 115 マルチパスHAループへのDS14mk2 ATまたはDS14mk4 FCディスク シェルフ の追加 ............................................................................................................... 115 HAペアのモジュールのアップグレードまたは交換 .............................................. 117 ディスク シェルフ モジュールについて ................................................................... 117 モジュールの種類の変更に関する制限事項 ........................................................ 117 推奨するモジュールの種類の変更方法 ............................................................... 118 モジュールのテスト ................................................................................................. 118 HAペアのパス ステータスの判別 ......................................................................... 119 モジュールのホットスワップ .................................................................................... 120 HAペアでの無停止操作 ........................................................................... 123 HAペアでの無停止操作に関する手順の参照先 ................................................. 123 Data ONTAP 8.2.1以降を実行するシステムでのディスク シェルフまたはルー プのホットリムーブ ............................................................................................ 123 HAペアでのアグリゲートの所有権の切り替え ........................................ 131 アグリゲートの再配置の仕組み ............................................................................ 131 ルートデータのパーティショニングがアグリゲートの再配置に及ぼす影響 ........ 132 アグリゲートの所有権の切り替え .......................................................................... 133 アグリゲートの再配置用のコマンド ....................................................................... 135 storage aggregate relocation startコマンドの主なパラメータ .................................. 136 アグリゲートの再配置時の拒否とデスティネーションのチェック .......................... 138 著作権に関する情報 ................................................................................. 商標に関する情報 ..................................................................................... マニュアルの更新について ....................................................................... 索引 ............................................................................................................ 141 142 143 144 7 HAペアの概要 HAペアでは、無停止操作やフォールト トレランスのために必要なハードウェアの冗長性が確保さ れます。ペアの各ノードでソフトウェア機能を使用して、パートナーのストレージをテイクオーバー し、そのストレージをギブバックすることができます。 HAペアとは HAペアとは、コントローラが直接相互に接続された2つのストレージ システム(ノード)のことです。 このような構成では、一方(パートナー)のノードが停止した場合、もう一方のノードがパートナーの ストレージをテイクオーバーして引き続きデータを提供することができます。 HAペアは、ペアの各ノードがストレージ、サブネット、およびテープ ドライブの共通セットへのアク セスを共有するか、ノードごとにストレージのセットを所有できるように構成できます。 コントローラは、HA インターコネクトを介して相互に接続されます。それにより、一方のノードで障 害が発生した場合、そのノードのディスク上にあるデータの処理をパートナー ノードが実行できま す。各ノードは継続的にパートナーを監視し、相互の不揮発性メモリ(NVRAMまたはNVMEM)に データをミラーリングします。コントローラが2つとも同じシャーシに搭載されている場合、インターコ ネクトは内部機能で外部の配線は必要ありません。 テイクオーバーとは、ノードがそのパートナーのストレージを引き継ぐプロセスです。ギブバックと は、引き継いだストレージの処理がパートナーに返されるプロセスです。どちらのプロセスも、手動 開始あるいは自動開始に設定することができます。 HAペアによる無停止操作とフォールト トレランスのサポート HAペアでは、フォールト トレランスがサポートされており、ハードウェアやソフトウェアのアップグレ ード、アグリゲートの所有権の切り替え、ハードウェアの保守などの無停止操作を実行できます。 • フォールト トレランス ◦ 一方のノードに障害や損傷が生じてテイクオーバーが発生した場合、障害ノードのデータは パートナー ノードから引き続き使用できます。 • 無停止のソフトウェア アップグレードまたはハードウェア保守 ◦ ハードウェアの保守やアップグレードの際は、一方のノードのstorage failover takeover処理を実行し、必要に応じてそのコントローラの電源をオフにすることができま す。アップグレードや保守を行う間、パートナー ノードが両方のノードのデータを引き続き提 供します。アップグレードや保守が終了したら、storage failover givebackを実行して データ サービスを元のノードに戻すことができます。 8 | ハイアベイラビリティ構成ガイド ◦ Data ONTAPの無停止アップグレードでは、ソフトウェアのアップグレードが実行されるよう、 ユーザが手動でstorage failover takeoverコマンドを入力してパートナー ノードをテイ クオーバーします。アップグレード中は、テイクオーバー ノードが両方のノードのデータを引 き続き提供します。 Clustered Data ONTAP 8.3 Upgrade and Revert/Downgrade Guide ◦ 無停止でのアグリゲートの所有権の切り替えは、テイクオーバーとギブバックなしで実行で きます。 HAペアは、次のような構成によって無停止操作とフォールト トレランスを提供します。 • HAペアのコントローラは、アダプタとケーブルで構成されるHAインターコネクトを介して相互接 続、または同じ筐体に2台のコントローラを搭載したシステムの場合は、内部インターコネクトを 介して接続されます。 ノードはインターコネクトを使用して、次のタスクを実行します。 ◦ もう一方のノードが動作しているかどうかを継続的に確認する ◦ 互いのNVRAMまたはNVMEMのログ データをミラーリングする • 各ノードで2つ以上のディスク シェルフ ループまたはストレージ アレイを使用します。次の条件 が適用されます。 ◦ 各ノードは各自のディスクまたはアレイLUNを管理する ◦ テイクオーバーが発生した場合、障害が発生したノードが再び利用可能になるまでの間、 稼働しているノードがパートナーのディスクまたはアレイLUNへの読み取り / 書き込みアク セスを提供する 注: ディスク所有権は、ディスクが接続されているディスク シェルフに基づいて設定されるの ではなく、Data ONTAPまたは管理者によって設定されます。 clustered Data ONTAP 8.3 物理ストレージ管理ガイド • 各ノードはスペア ディスク、スペア アレイLUN、またはその両方を独自に所有し、もう一方のノ ードとは共有しません。 • 各ノードのルート ボリュームにはメールボックス ディスクまたはアレイLUNがあり、次のタスク を実行します。 ◦ ペア間で一貫性を維持する ◦ もう一方のノードが稼働しているかどうか、またはテイクオーバーを実行したかどうかを継続 的に確認する ◦ 構成情報を格納する 関連コンセプト HAペアでの無停止操作(123ページ) HAペアの概要 | 9 HAペアでの無停止操作に関する手順の参照先 (123ページ) ディスク所有権の種類(31ページ) HAペアによるフォールト トレランスの強化 ストレージ システムには、特定のケーブルやハードウェア コンポーネントなど、さまざまな単一点 障害が存在します。HAペアを使用すると、システムで障害が発生した場合に、障害から復旧する までそのシステムをパートナーで引き継いでデータの提供を継続できるため、単一点障害が大幅 に少なくなります。 単一点障害の定義 単一点障害(Single Point of Failure)は、データ アクセスの中断やデータ損失を引き起こす可能性 のある単一ハードウェア コンポーネントの障害を意味します。 単一点障害には、三重ディスク障害や二重ディスク シェルフ モジュール障害などの複数のハード ウェア エラーや周期的なハードウェア エラーは含まれません。 ストレージ システムを含むハードウェア コンポーネントは、障害発生率が小さい場合に、非常に優 れた安定性を示します。コントローラやアダプタといったハードウェア コンポーネントで障害が発生 した場合は、コントローラ フェイルオーバー機能を使用することによって、クライアント アプリケーシ ョンとユーザに対し、継続的なデータ可用性およびデータの整合性を提供し続けることができま す。 HAペアの単一点障害の分析 ストレージ システムには、ハードウェア コンポーネントやケーブルなど、さまざまな単一点障害が ありますが、HA構成を使用すると、それらを排除してデータの可用性を高めることができます。 ハードウェア コンポー ネント 単一点障害 ストレージ フェイルオーバーによる単一点 スタンド アロン HAペア コントローラ はい いいえ コントローラに障害が発生した場合、そのノー ドからパートナー ノードへのフェイルオーバ ーが自動的に実行されます。引き継いだパー トナー ノードが両方のノードのデータを処理し ます。 NVRAM はい いいえ NVRAMアダプタに障害が発生した場合、そ のノードからパートナー ノードへのフェイルオ ーバーが自動的に実行されます。引き継いだ パートナー ノードが両方のノードのデータを 処理します。 障害の排除 10 | ハイアベイラビリティ構成ガイド ハードウェア コンポー ネント 単一点障害 ストレージ フェイルオーバーによる単一点 スタンド アロン HAペア CPUファン はい いいえ CPUファンに障害が発生した場合、そのノー ドからパートナー ノードへのフェイルオーバ ーが自動的に実行されます。引き継いだパー トナー ノードが両方のノードのデータを処理し ます。 インターフェイス グル ープ(仮想インターフ ェイス)を使用した複 数のNIC 通常ははい いいえ (すべての NICに障害 が発生した 場合) インターフェイス グループ内のネットワーキン グ リンクの1つに障害が発生した場合、ネット ワーキング トラフィックは自動的にそのノード の残りのネットワーキング リンクを介して送 信されます。 この場合、フェイルオーバーは 不要です。 SAS HBAまたはFCAL HBA(ホスト バス アダプタ) はい マルチパスHAを使用しない構成の場合、プ ライマリ ループ用のHBAに障害が発生する と、パートナー ノードは障害発生時にテイク オーバーを試みます。マルチパスHAを使用 する場合は、テイクオーバーは不要です。 いいえ 障害の排除 マルチパスHAを使用しない構成の場合、セ カンダリ ループ用のHBAに障害が発生する と、フェイルオーバー機能は無効になります が、両方のノードはそれぞれのアプリケーシ ョンおよびユーザに対するデータ処理を継続 します。影響や遅延は生じません。マルチパ スHAを使用する場合は、フェイルオーバー 機能への影響はありません。 SASケーブルまたは FC-ALケーブル(コン トローラ / シェルフ、シ ェルフ / シェルフ) いいえ (デュアル パス接続を 使用する場 合) いいえ マルチパスHAを使用しない構成の場合、 SASスタックまたはFC-ALループが切断する と、シェルフの種類によっては、フェイルオー バーが発生する可能性があります。 パートナー ノードはネゴシエート フェイルオ ーバー機能を使用し、ディスク シェルフ数に 基づいてデータ処理に最適なノードを判別し ます。マルチパスHAを使用する場合は、フェ イルオーバーは不要です。 HAペアの概要 | 11 ハードウェア コンポー ネント 単一点障害 ストレージ フェイルオーバーによる単一点 スタンド アロン HAペア ディスク シェルフ モジ ュール いいえ (デュアル パス接続を 使用する場 合) いいえ マルチパスHAを使用しない構成でディスク シェルフ モジュールに障害が発生すると、フ ェイルオーバーが発生する可能性がありま す。 パートナー ノードはネゴシエート フェイルオ ーバー機能を使用し、ディスク シェルフ数に 基づいてデータ処理に最適なノードを判別し ます。マルチパスHAを使用する場合は、影 響はありません。 ディスクドライブ いいえ いいえ ディスクに障害が発生しても、ノードはRAID 4パリティ ディスクからデータを再構築できま す。 この場合、フェイルオーバーは不要です。 電源装置 通常ははい いいえ (両方の電 源装置に障 害が発生し た場合) コントローラとディスク シェルフの両方に、デ ュアル電源装置があります。1つの電源装置 で障害が発生すると、自動的にもう一方の電 源装置に切り替わります。 この場合、フェイルオーバーは不要です。両 方の電源装置に障害が発生すると、ノードは 自動的にそのパートナー ノードにフェイルオ ーバーし、パートナー ノードが両方のノード のデータを処理します。 ファン(コントローラま たはディスク シェル フ) 通常ははい いいえ (両方のフ ァンに障害 が発生した 場合) コントローラとディスク シェルフの両方に、複 数のファンがあります。1つのファンで障害が 発生すると、もう一方のファンが自動的に送 風を始めます。この場合、フェイルオーバー は不要です。 両方のファンに障害が発生すると、ノードは 自動的にそのパートナー ノードにフェイルオ ーバーし、パートナー ノードが両方のノード のデータを処理します。 HAインターコネクト アダプタ サポートさ れない HAインターコネクト アダプタに障害が発生し た場合、フェイルオーバー機能は無効になり ますが、両方のノードはそれぞれのアプリケ ーションおよびユーザに対するデータ処理を 継続します。 いいえ 障害の排除 12 | ハイアベイラビリティ構成ガイド ハードウェア コンポー ネント 単一点障害 ストレージ フェイルオーバーによる単一点 スタンド アロン HAペア HAインターコネクト ケーブル サポートさ れない いいえ 障害の排除 HAインターコネクト アダプタは、デュアル構 成のHAインターコネクト ケーブルをサポート しています。 1本のケーブルで障害が発生し ても、ハートビートおよびNVRAMデータは2 本目のケーブルを介して自動的に送信され ます。遅延や中断は生じません。 両方のケーブルで障害が発生した場合、フェ イルオーバー機能は無効になりますが、両方 のノードはそれぞれのアプリケーションおよび ユーザに対するデータ処理を継続します。 HAペアの接続とコンポーネント HAペアのそれぞれのノードで、ネットワーク接続、コントローラ間のHAインターコネクト、およびそ のノードのディスク シェルフとパートナー ノードのディスク シェルフへの接続が必要です。 次の図は、標準のDS4243ディスク シェルフとマルチパスHAを使用した標準HAペアを示していま す。 ネットワーク HAインターコネクト ノード1 ノード2 ノード1の ストレージ ノード2の ストレージ プライマリ接続 冗長プライマリ接続 スタンバイ接続 冗長スタンバイ接続 HAペアの概要 | 13 関連情報 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 HAペアの種類の比較 HAペアの種類によって、サポートされるデータの複製およびフェイルオーバー機能は異なります。 HAペアの種類 データが複製さ ノード全体(スト れるか レージを含む) の機能喪失後 にフェイルオー バーが可能か 注記 標準HAペア × × さまざまなハードウェアSPOFに備える ことによって高可用性を提供する場合 に使用 ミラーHAペア ○ × 標準HAペアの利点に加え、データ保 護を強化する場合に使用 MetroCluster ○ ○ データとハードウェアを二重化し、サイ ト全体の喪失などの大規模な災害に 備える場合に使用 関連情報 clustered Data ONTAP 8.3 MetroClusterインストレーションおよび構成ガイド clustered Data ONTAP 8.3 MetroCluster管理およびディザスタ リカバリ ガイド HAペアとクラスタの関係 HAペアはクラスタのコンポーネントであり、HAペアの両方のノードはデータ ネットワークおよびク ラスタ ネットワークを介してクラスタ内の他のノードに接続されます。ただし、HAペアのノードでテイ クオーバーできるのは、相互のストレージだけです。 HAペアのコントローラは、クラスタ ネットワークを介してクラスタ内の他のコントローラに接続され ますが、HAインターコネクトおよびディスク シェルフの接続は、ノードとそのパートナーおよびそれ らのディスク シェルフまたはアレイLUNとの間でのみ確立されます。 HAインターコネクトを確立し、各ノードをパートナーのストレージに接続することで、ハイアベイラビ リティ機能が物理的にサポートされます。ハイアベイラビリティ構成のストレージ フェイルオーバー 機能では、クラスタ内の他のノードには対応できません。 14 | ハイアベイラビリティ構成ガイド 注: ネットワーク フェイルオーバーでは、HAインターコネクトに依存せずに、データ ネットワーク インターフェイスをクラスタ内のHAペア以外のノードにフェイルオーバーできます。ネットワーク フェイルオーバーはストレージ フェイルオーバーとは異なる機能で、クラスタ内のすべてのノード のネットワーク耐障害性を高めます。 複数のノードを含むクラスタでは、ノードを非HA(スタンドアロン)として構成することはできません。 シングルノード クラスタはサポートされますが、2つの異なるシングルノード クラスタを結合して1つ のクラスタを作成することはサポートされません。この場合は、一方のシングルノード クラスタの内 容を消去してもう一方に結合し、HAペアで構成される2ノード クラスタを作成します。 clustered Data ONTAP 8.3 システム アドミニストレーション ガイド(クラスタ管理) 次の図は、2つのHAペアを示しています。それぞれのHAペアで、ノードとそのストレージの間のマ ルチパスHAストレージ接続が確立されています。わかりやすくするために、データ ネットワークと クラスタ ネットワークへの接続については、プライマリ接続だけを示しています。 HAペアの概要 | 15 ノード4の ストレージ ノード3の ストレージ ノード3 ノード4 HAインターコネクト HAペア データ ネットワーク ノード1 ノード1の ストレージ クラスタ ネットワーク HAインターコネクト ノード2 ノード2の ストレージ HAペア ストレージ接続 プライマリ接続 冗長プライマリ接続 スタンバイ接続 冗長スタンバイ接続 このクラスタのストレージ フェイルオーバーのシナリオは次のとおりです。 • ノード1で障害が発生すると、ノード1のストレージがノード2にテイクオーバーされます。 • ノード2で障害が発生すると、ノード2のストレージがノード1にテイクオーバーされます。 • ノード3で障害が発生すると、ノード3のストレージがノード4にテイクオーバーされます。 • ノード4で障害が発生すると、ノード4のストレージがノード3にテイクオーバーされます。 ノート1とノード2の両方で障害が発生すると、ノード1およびノード2で所有しているストレージがデー タ ネットワークで使用できなくなります。ノード3およびノード4は、ノード1およびノード2と一緒にクラ 16 | ハイアベイラビリティ構成ガイド スタ化されていますが、ノード1およびノード2のストレージへの直接接続は確立されていないため、 それらのストレージをテイクオーバーすることはできません。 HAペアとMetroCluster構成の関係 シングルノード クラスタの場合を除き、Data ONTAPのクラスタ構成の基本単位はHAペアです。 MetroClusterは、HAペアを基盤として総合的なディザスタ リカバリ機能を提供します。 シングルノード クラスタの場合を除き、clustered Data ONTAPは、同じモデルのストレージ コントロ ーラ(プラットフォーム)ハードウェアのノードからなる1つ以上のHAペアで構成されます。クラスタ は、特定のプロトコルとプラットフォームの組み合わせに対し、2ノード単位で最大24ノードまで拡張 できます。 Clustered Data ONTAP Storage Platform Mixing Rules この同一プラットフォームで構成されたHAペアが、可用性に優れたストレージ環境を実現する基 盤となります。 MetroCluster構成は、ミラーリングを使用して災害から復旧しデータを保護することで、HAペアの 耐障害性を高めます。ディザスタ リカバリは単一のMetroClusterコマンドで実行されます。このコマ ンドは、セカンダリ サイトのStorage Virtual Machine(SVM)をアクティブ化し、災害の影響を受けた プライマリ サイトからミラーリングされたデータを提供します。 MetroCluster構成では、物理的に分離された2つのミラー クラスタを実装することでデータを保護し ます。各クラスタで、もう一方のクラスタのデータおよびStorage Virtual Machine(SVM)の設定が同 期的にミラーリングされます。一方のサイトで災害が発生したときは、ミラーリングされたSVMをア クティブ化し、ミラーリングされたデータをセカンダリ サイトから提供できます。また、各クラスタのノ ードはHAペアとして構成されるため、ローカル レベルのフェイルオーバーが提供されます。 関連情報 clustered Data ONTAP 8.3 MetroClusterインストレーションおよび構成ガイド clustered Data ONTAP 8.3 MetroCluster管理およびディザスタ リカバリ ガイド 2ノードのスイッチレス クラスタの場合 2ノードのスイッチレス クラスタ構成の場合、HAペアのノードをクラスタ ネットワーク スイッチに接 続する必要はありません。代わりに、クラスタ ネットワークで2台のストレージ コントローラを直接接 続します。 2ノード スイッチレス クラスタでは、2つのノードが常にHAペアになります。ケーブル配線の詳細に ついては、Hardware Universe(hwu.netapp.com)、およびご使用のシステムのセットアップ ガイドを 参照してください。スイッチレス クラスタ機能は、ノードが3つ以上の場合は使用できません。ノード を追加する予定の場合は、クラスタの各ノードをクラスタ ネットワーク スイッチに接続する必要が あります。 HAペアの概要 | 17 関連コンセプト 1組のHAペアで構成されるクラスタの場合(37ページ) 関連タスク 2ノード クラスタでのクラスタHAとスイッチレス クラスタの有効化(77ページ) 関連参照情報 テイクオーバーを伴わないノードの停止またはリブート(104ページ) 18 | ハイアベイラビリティ構成ガイド ミラーHAペアの概要 ミラーHAペアは、標準HAペアと同様にフェイルオーバーによって高可用性を実現します。さらに、 ミラーHAペアでは、ミラーリングされたすべてのデータの完全なコピーも2組維持されます。このコ ピーはプレックスといい、Data ONTAPがミラーリングされたアグリゲートに書き込むたびに、同期 的に更新されます。プレックスは、一方のディスクまたはアレイLUNのセットが失われた場合に備 えて、物理的に離れた場所に配置できます。 注: ミラーHAペアには、一方のノードで深刻な障害が発生した場合やノードが無効になった場合 にパートナー ノードにフェイルオーバーする機能はありません。たとえば、ストレージも含めたノ ード全体で電源が喪失した場合に、パートナー ノードへのフェイルオーバーを実行することはで きません。これにはMetroCluster構成を利用する必要があります。 ルート アグリゲートがミラーリングされた場合は、現在のすべてのメールボックス ディスクがアク セス可能でないかぎり、ストレージ フェイルオーバーのテイクオーバーが失敗します。 すべての メールボックス ディスクがアクセス可能である場合は、残りのプレックスを使用してストレージ フ ェイルオーバーのテイクオーバーを正常に実行できます。 ミラーHAペアには、SyncMirror(storage aggregate mirrorコマンドで実装)が使用されます。 関連情報 clustered Data ONTAP 8.3 データ保護ガイド clustered Data ONTAP 8.3 MetroClusterインストレーションおよび構成ガイド clustered Data ONTAP 8.3 MetroCluster管理およびディザスタ リカバリ ガイド clustered Data ONTAP 8.3マニュアル ページ:storage aggregate mirror - Mirror an existing aggregate ミラーHAペアの利点 データをミラーリングすることで、ディスク障害に対するデータ保護を強化し、ディスク以外のコンポ ーネントで問題が発生した場合のフェイルオーバーを軽減します。 データのミラーリングによって、データ損失を招く次の問題に備えることができます。 • RAID-DP(RAIDダブルパリティ)アグリゲートに含まれる3本以上のディスクの障害または機能 喪失 • アレイLUNの障害(ストレージ アレイの二重ディスク障害によるものなど) • ストレージ アレイの障害 ミラーHAペアでは、SAS HBA、FC-ALアダプタ、ディスク シェルフ ループまたはスタック、ディスク シェルフ モジュールに障害が発生しても、フェイルオーバーは必要ありません。 ミラーHAペアの概要 | 19 標準HAペアと同様、ミラーHAペアのいずれかのノードが機能喪失した場合、またはデータにアク セスできなくなった場合は、問題が解決されるまで、他方のノードが自動的に障害ノードのデータを 提供します。 非対称構成のミラー HAペア この方法では、ストレージを選択的にミラーリングできます。たとえば、1つのノード上のすべてのス トレージをミラーリングし、もう一方のノード上のストレージはまったくミラーリングしないことも可能 です。テイクオーバーは正常に機能しますが、ミラーリングされていないデータを含むストレージが 損傷したり壊れたりした場合、そのデータは失われます。 注: ミラーリングされていないストレージは、ミラーリングされているストレージと同様に、両方のノ ードに接続する必要があります。HAペアでは、ストレージを両方のノードに接続することが必要 です。 20 | ハイアベイラビリティ構成ガイド テイクオーバーとギブバックの概要 テイクオーバー処理とギブバック処理を使用すると、HA構成を活用して、無停止操作を実行した り、サービスの中断を回避したりできます。テイクオーバーとは、ノードがそのパートナーのストレー ジを引き継ぐプロセスです。ギブバックとは、引き継いだストレージの処理がパートナーに返される プロセスです。これらのプロセスは、さまざまな方法で開始されます。 テイクオーバーが発生する状況 テイクオーバーは手動で開始できるほか、HAペアの設定によっては、フェイルオーバー イベント の発生時に自動的に実行されます。場合によっては、設定に関係なく自動的に実行されることもあ ります。 テイクオーバーが発生する状況は次のとおりです。 • storage failover takeoverコマンドを使用してテイクオーバーを手動で開始した場合 • HAペアのノードでパニック時のテイクオーバーが有効になっており(デフォルト)、そのノードで ソフトウェアまたはシステムの障害が発生してパニック状態になった場合 デフォルトでは、パートナーがパニック状態から回復してブートされるとギブバックが自動的に 実行されて、パートナーは通常の動作状態に戻ります。 • HAペアの一方のノードにシステム障害が発生し(電源の喪失など)、リブートできない場合 注: ノードのストレージへの電源も同時に喪失した場合は、標準テイクオーバーは実行できま せん。 • ノードのパートナーからハートビート メッセージが届かない場合 この状況は、パートナーでハードウェアまたはソフトウェア障害が発生し、パニックにはならなか ったが、正常な機能は失った場合に発生します。 • -fパラメータまたは-inhibit-takeover trueパラメータを使用しないで一方のノードを停止 した場合 注: クラスタHAが有効な2ノード クラスタで、‑inhibit‑takeover trueパラメータを使用して ノードを停止またはリブートする場合は、クラスタHAを無効にしてから、オンラインのままに するノードにイプシロンを割り当てておかないと、両方のノードでデータ処理が停止します。 • ‑inhibit‑takeover trueパラメータを使用しないで一方のノードをリブートした場合 storage failoverコマンドの-onrebootパラメータはデフォルトで有効になります。 • ハードウェア アシスト テイクオーバーが有効になっており、リモート管理デバイス(サービス プ ロセッサ)でパートナー ノードの障害が検出されてテイクオーバーがトリガーされた場合 テイクオーバーとギブバックの概要 | 21 関連タスク テイクオーバーを手動で開始する場合のイプシロンの移動(109ページ) 関連参照情報 テイクオーバーを伴わないノードの停止またはリブート(104ページ) フェイルオーバー イベントの原因 / 結果表 HAペアのコントローラ フェイルオーバーは、特定のイベントが発生すると開始されます。ストレー ジ システムによる対応は、イベントおよびHAペアの種類によって異なります。 イベント フェイルオーバ ーがトリガーさ れる 将来的なフェイ ルオーバーまた は正常なフェイ ルオーバーの 発生が妨げられ る イベント発生後に関連ボリュームでデータ を引き続き使用できる シングルノード クラ スタ 標準またはミラー HAペア 単一ディスク 障害 いいえ いいえ はい はい 二重ディスク 障害(同じ RAIDグルー プ内の2つの ディスクの障 害) はい。 SyncMirrorまた はRAID-DPを 使用している場 合は、いいえ 通常は、はい。 ルート ボリュー ムに二重ディス ク障害が発生し たか、またはメ ールボックス デ ィスクが影響を 受ける場合は、 フェイルオーバ ーはすべて無効 いいえ。RAID-DPま たはSyncMirrorを使 用している場合は、 はい いいえ。RAID-DP またはSyncMirror を使用している場 合は、はい 三重ディスク 障害(同じ RAIDグルー プ内の3つの ディスクの障 害) 通常は、はい。 SyncMirrorを使 用している場 合、テイクオー バーはすべて無 効。それ以外の 場合は、はい 通常は、はい。 いいえ ルート ボリュー ムに三重ディス ク障害が発生し た場合、フェイ ルオーバーはす べて無効 いいえ 22 | ハイアベイラビリティ構成ガイド イベント フェイルオーバ ーがトリガーさ れる 将来的なフェイ ルオーバーまた は正常なフェイ ルオーバーの 発生が妨げられ る イベント発生後に関連ボリュームでデータ を引き続き使用できる シングルノード クラ スタ 標準またはミラー HAペア SyncMirrorまた はマルチパス HAを使用して いる場合は、い いえ。それ以外 の場合は、はい 通常は、はい。 ルート ボリュー ムに二重ディス ク障害が発生し た場合、フェイ ルオーバーはす べて無効 マルチパスHAまた はSyncMirrorを使 用している場合は、 はい マルチパスHAまた はSyncMirrorを使 用している場合、ま たはフェイルオーバ ーに成功した場合 は、はい 単一HBA(イ いいえ ニシエータ) 障害、ルー プB はい。 SyncMirrorまた はマルチパス HAを使用して おり、メールボッ クス ディスクに 影響しない場合 は、いいえ マルチパスHAまた はSyncMirrorを使 用している場合は、 はい マルチパスHAまた はSyncMirrorを使 用している場合、ま たはフェイルオーバ ーに成功した場合 は、はい 単一HBAイ ニシエータの 障害(両方 のループで 同時発生) データがミラー リングされてい るか、マルチパ スHAが使用さ れていて、メー ルボックス ディ スクが影響を受 けない場合は、 いいえ。それ以 外の場合は、は い いいえ。データがミ ラーリングされてい ないか、マルチパス HAを使用している 場合は、はい データがミラーリン グされているか、マ ルチパスHAが使用 されている場合、フ ェイルオーバーは 不要 単一HBA(イ ニシエータ) 障害、ルー プA はい。別の(up 状態の)ループ でデータがミラ ーリングされて いないか、マル チパスHAを使 用している場 合、テイクオー バーは不要 AT-FCX障害 マルチディスク ボリューム障害 (ループA) またはオープン ループ状態が発 生して、 SyncMirrorもマ ルチパスHAも 使用されていな い場合のみ 通常は、はい。 いいえ ルート ボリュー ムに二重ディス ク障害が発生し た場合、フェイ ルオーバーはす べて無効 フェイルオーバーに 成功した場合は、 はい テイクオーバーとギブバックの概要 | 23 イベント フェイルオーバ ーがトリガーさ れる AT-FCX障害 いいえ (ループB) 将来的なフェイ ルオーバーまた は正常なフェイ ルオーバーの 発生が妨げられ る イベント発生後に関連ボリュームでデータ を引き続き使用できる シングルノード クラ スタ 標準またはミラー HAペア SyncMirrorまた はマルチパス HAを使用して いる場合は、い いえ。それ以外 の場合は、はい マルチパスHAまた はSyncMirrorを使 用している場合は、 はい はい IOM障害 (ループA) マルチディスク ボリューム障害 またはオープン ループ状態が発 生して、 SyncMirrorもマ ルチパスHAも 使用されていな い場合のみ 通常は、はい。 いいえ ルート ボリュー ムに二重ディス ク障害が発生し た場合、フェイ ルオーバーはす べて無効 フェイルオーバーに 成功した場合は、 はい IOM障害 (ループB) いいえ SyncMirrorまた はマルチパス HAを使用して いる場合は、い いえ。それ以外 の場合は、はい マルチパスHAまた はSyncMirrorを使 用している場合は、 はい はい シェルフ(バ ックプレー ン)障害 マルチディスク ボリューム障害 またはオープン ループ状態の発 生時、データが ミラーリングされ ていない場合の み 通常は、はい。 ルート ボリュー ムに二重ディス ク障害が発生し たか、またはメ ールボックスが 影響を受ける場 合は、フェイル オーバーはすべ て無効 データがミラーリン グされている場合 は、はい。それ以外 の場合は、いいえ データがミラーリン グされている場合 は、はい。それ以外 の場合は、いいえ シェルフ、単 一電源障害 いいえ いいえ はい はい 24 | ハイアベイラビリティ構成ガイド イベント フェイルオーバ ーがトリガーさ れる 将来的なフェイ ルオーバーまた は正常なフェイ ルオーバーの 発生が妨げられ る イベント発生後に関連ボリュームでデータ を引き続き使用できる シングルノード クラ スタ 標準またはミラー HAペア シェルフ、二 重電源障害 マルチディスク ボリューム障害 またはオープン ループ状態の発 生時、データが ミラーリングされ ていない場合の み 通常は、はい。 ルート ボリュー ムに二重ディス ク障害が発生し たか、またはメ ールボックス デ ィスクが影響を 受ける場合は、 フェイルオーバ ーはすべて無効 データがミラーリン グされている場合 は、はい。それ以外 の場合は、いいえ データがミラーリン グされている場合 は、はい。それ以外 の場合は、いいえ コントロー ラ、単一電 源障害 いいえ いいえ はい はい コントロー ラ、二重電 源障害 はい 電源が復旧する いいえ までは、はい フェイルオーバーに 成功した場合は、 はい HAインター コネクト障害 (1ポート) いいえ いいえ サポートされない はい HAインター いいえ コネクト障害 (両方のポー ト) はい サポートされない はい テープ インタ いいえ ーフェイス障 害 いいえ はい はい 許容限度を 超える熱量 はい いいえ いいえ いいえ ファン障害 (ディスク シ ェルフまたは コントロー ラ) いいえ いいえ はい はい テイクオーバーとギブバックの概要 | 25 イベント フェイルオーバ ーがトリガーさ れる 将来的なフェイ ルオーバーまた は正常なフェイ ルオーバーの 発生が妨げられ る イベント発生後に関連ボリュームでデータ を引き続き使用できる シングルノード クラ スタ 標準またはミラー HAペア リブート はい いいえ いいえ フェイルオーバーが 発生した場合は、 はい パニック はい いいえ いいえ フェイルオーバーが 発生した場合は、 はい 関連情報 NetApp Hardware Universe clustered Data ONTAP 8.3 システム アドミニストレーション ガイド(クラスタ管理) SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 ハードウェア アシスト テイクオーバーによるテイクオーバー時間の短 縮 ハードウェア アシスト テイクオーバーでは、ノードのリモート管理デバイス(サービス プロセッサ)を 使用して障害を検出し、パートナーのハートビートの停止を認識するよりも早くテイクオーバーを開 始することで、テイクオーバー処理にかかる時間を短縮します。 ハードウェア アシスト テイクオーバーを使用しない場合は、障害が発生しても、ノードからハートビ ートが届かなくなったことをパートナーで認識するまでは待機状態となり、ハートビートがなくなった ことを確認してからテイクオーバーが開始されます。 ハードウェア アシスト テイクオーバー機能では、次のようなプロセスで、リモート管理デバイスを利 用してその待機時間が発生しないようにします。 1. リモート管理デバイスで、特定の種類の障害についてローカル システムを監視します。 2. 障害が検出されると、リモート管理デバイスからパートナー ノードにすぐにアラートが送信され ます。 3. アラートを受け取ったあと、すぐにパートナーでテイクオーバーが開始されます。 ハードウェア アシスト テイクオーバーはデフォルトで有効になります。 26 | ハイアベイラビリティ構成ガイド テイクオーバー時の動作 パートナーをテイクオーバーしたノードは、パートナーのアグリゲートとボリュームのデータを提供 および更新します。テイクオーバーの際、ノードはパートナーのアグリゲートの所有権を取得し、パ ートナーのLIFはネットワーク インターフェイスのフェイルオーバー ルールに従ってを移行されま す。テイクオーバーが発生すると、一部のSMB 3.0接続を除き、既存のSMB(CIFS)は切断されま す。 ノードでパートナーをテイクオーバーする際の動作は次のとおりです。 1. ユーザが開始したネゴシエート テイクオーバーの場合は、アグリゲートの再配置が実行され、 パートナー ノードからテイクオーバーを実行中のノードにデータ アグリゲートが一度に1つずつ 移動されます。 各アグリゲート(ルート アグリゲートを除く)の現在の所有者は、ターゲット ノードからテイクオー バーを実行中のノードに変わります。所有権の変更時に各アグリゲートが短時間停止します。 ただし、アグリゲートの再配置を伴わないテイクオーバーに比べると短時間で済みます。 • 処理の進捗はstorage failover show‑takeoverコマンドを使用して監視できます。 • storage failover takeoverコマンドで‑bypass‑optimizationパラメータを使用する と、そのテイクオーバーの実行時にアグリゲートの再配置を省略できます。以降のすべての 計画的テイクオーバーでアグリゲートの再配置を省略するには、storage failover modifyコマンドの‑bypass‑takeover‑optimizationパラメータをtrueに設定します。 注: 計画的テイクオーバー処理では、クライアントの停止を最小限にするため、アグリゲート が順に再配置されます。アグリゲートの再配置を行わない場合、計画的テイクオーバーの際 のクライアントの停止時間が長くなります。停止に関する厳密な要件がある環境では、 storage failover modifyコマンドの‑bypass‑takeover‑optimizationパラメータを trueに設定することは推奨されません。 2. ユーザが開始したネゴシエート テイクオーバーの場合は、ターゲット ノードが正常にシャットダ ウンされ、そのあとにルート アグリゲートと手順1で再配置されなかったアグリゲートのテイクオ ーバーが実行されます。 3. ストレージ テイクオーバーの開始前に、ターゲット ノードのデータLIFが、LIFのフェイルオーバ ー ルールに基づいて、テイクオーバーを実行中のノードまたはクラスタ内のその他のノードに 移行されます。 storage failover takeoverコマンドで‑skip‑lif-migrationパラメータを使用すると、 LIFの移行を省略できます。 Clustered Data ONTAP 8.3 File Access Management Guide for CIFS Clustered Data ONTAP 8.3 File Access Management Guide for NFS Clustered Data ONTAP 8.3 Network Management Guide 4. テイクオーバーの発生時に既存のSMB(CIFS)セッションが切断されます。 テイクオーバーとギブバックの概要 | 27 注意: SMBプロトコルの性質上、Continuous Availabilityプロパティが設定された共有 に接続しているSMB 3.0セッションを除き、他のSMBセッションはすべて停止されます。SMB 1.0およびSMB 2.xのセッションは、テイクオーバー後に再接続できません。そのため、テイク オーバー時に停止が発生し、一部のデータが失われる可能性があります。 5. 継続的な可用性が設定された共有に対するSMB 3.0セッションは、テイクオーバー後に元の共 有に再接続できます。 サイトでSMB 3.0を使用してMicrosoft Hyper-Vに接続している場合、関連付けられている共有 でContinuous Availabilityプロパティが設定されていれば、テイクオーバー時にそれらの セッションは停止されません。 Clustered Data ONTAP 8.3 File Access Management Guide for CIFS テイクオーバーを実行中のノードがパニック状態になった場合 テイクオーバーを実行中のノードが、そのテイクオーバーを開始してから60秒以内にパニック状態 になると、次のような状態になります。 • パニック状態になったノードがリブートされます。 • ノードのリブート後、セルフリカバリ処理が実行され、テイクオーバー モードでなくなります。 • フェイルオーバーが無効になります。 • パートナーの一部のアグリゲートをまだ所有している場合は、ストレージ フェイルオーバーを有 効にしたあとに、storage failover givebackコマンドを使用してそれらのアグリゲートをパ ートナーに戻します。 関連コンセプト テイクオーバー処理やギブバック処理に対するHAポリシーの影響(28ページ) 自動ギブバックの仕組み(82ページ) 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover takeover - Take over the storage of a node's partner clustered Data ONTAP 8.3マニュアル ページ:storage failover show-takeover - Display takeover status ギブバック時の動作 アグリゲートおよびボリュームの所有権は、パートナー ノードの問題の解決後やメンテナンス処理 の完了後に、ローカル ノードからパートナー ノードに戻されます。また、パートナー ノードがブート 28 | ハイアベイラビリティ構成ガイド され、手動または自動でギブバックが開始されたときにも、ローカル ノードから所有権が戻されま す。 通常のギブバックのプロセスを次に示します。ここでは、ノードAにノードBがテイクオーバーされた とします。ノードBの問題は解決されており、データの提供を再開できる状態になっています。 1. ノードBの問題が解決され、次のメッセージが表示されています。 Waiting for giveback 2. storage failover givebackコマンドまたは自動ギブバック(設定されている場合)でギブバ ックが開始されます。 これにより、ノードBのアグリゲートおよびボリュームの所有権をノードAからノードBに戻すプロ セスが開始されます。 3. ノードAから最初にルート アグリゲートの制御が戻されます。 4. ノードBを通常の動作状態に戻すためのブート プロセスが実行されます。 5. ノードBのブート プロセスでルート以外のアグリゲートを受け取れる状態になった時点で、すぐ に他のアグリゲートの所有権を戻すプロセスが開始されます。ギブバックが完了するまでの間 に、それらの所有権がノードAから1つずつ戻されます。 ギブバックの進捗は、storage failover show-givebackコマンドで監視できます。 各アグリゲートのI/Oは、そのアグリゲートのギブバックが完了した時点で再開されます。そのた め、各アグリゲートの全体的な停止時間が短くなります。 関連コンセプト テイクオーバー処理やギブバック処理に対するHAポリシーの影響(28ページ) 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover giveback - Return failed-over storage to its home node clustered Data ONTAP 8.3マニュアル ページ:storage failover show-giveback - Display giveback status テイクオーバー処理やギブバック処理に対するHAポリシーの影響 Data ONTAPでは、HAポリシーCFOまたはSFOがアグリゲートに自動的に割り当てられ、アグリゲ ートとそのボリュームでのストレージ フェイルオーバー処理(テイクオーバーとギブバック)の実行 方法が制御されます。 HAポリシーは、システムの各アグリゲートに必要です。CFO(コントローラ フェイルオーバー)と SFO(ストレージ フェイルオーバー)の2つがあり、どちらが割り当てられているかによって、Data ONTAPのストレージ フェイルオーバーおよびギブバック処理で使用されるアグリゲートの制御順 序が決まります。 テイクオーバーとギブバックの概要 | 29 CFOおよびSFOという用語は、ストレージ フェイルオーバー(テイクオーバーとギブバック)処理を 表すこともありますが、実際はアグリゲートに割り当てられるHAポリシーのことを表しています。た とえば、SFOアグリゲートやCFOアグリゲートという表現は、単にアグリゲートに割り当てられたHA ポリシーを指しています。 • clustered Data ONTAPシステムで作成されたアグリゲート(ルート ボリュームを含むルート アグ リゲートを除く)には、SFOのHAポリシーが割り当てられます。手動で開始されたテイクオーバ ーでは、テイクオーバー前にSFOアグリゲート(ルート以外)をパートナーに順番に再配置する ことで、パフォーマンスが最適化されます。ギブバック処理では、テイクオーバーされたシステ ムがブートして管理アプリケーションがオンラインになり、ノードがアグリゲートを受け取れる状 態になってから、アグリゲートが順番にギブバックされます。 • アグリゲートの再配置処理では、アグリゲートのディスク所有権が再割り当てされ、ノードの制 御がパートナーに移るため、SFOのHAポリシーが割り当てられたアグリゲートだけが再配置の 対象になります。 • ルート アグリゲートがギブバックされないとテイクオーバーされたシステムはブートできないた め、ルート アグリゲートには常にCFOのHAポリシーが割り当てられ、最初にギブバックされま す。その他のすべてのアグリゲートは、テイクオーバーされたシステムのブート プロセスが完了 して管理アプリケーションがオンラインになり、ノードがアグリゲートを受け取れる状態になって から、順番にギブバックされます。 注: アグリゲートのHAポリシーをSFOからCFOに変更する処理は保守モードの処理です。この 設定は、カスタマー サポートの担当者から指示がないかぎり変更しないでください。 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover show-giveback - Display giveback status clustered Data ONTAP 8.3マニュアル ページ:storage failover show-takeover - Display takeover status テイクオーバーやギブバックに対するルートデータ パーティショニン グの影響 エントリレベルおよびオールフラッシュFAS(AFF)のプラットフォーム モデルでルートデータ パーテ ィショニング(共有ディスク)を使用している場合、ストレージ フェイルオーバーのテイクオーバーや ギブバックの処理は非共有ディスクと変わりません。 ルートデータ パーティショニングを使用しているストレージ システムでは、アグリゲートのHAポリシ ーに従ってストレージ フェイルオーバーのテイクオーバーおよびギブバック処理が実行されます。 テイクオーバーまたはギブバック処理時にコンテナ ディスクの所有権は変更されません。 ネゴシエート ストレージ フェイルオーバーのテイクオーバーまたはギブバックの際に発生する所有 権の変更は一時的なものです。 30 | ハイアベイラビリティ構成ガイド 関連コンセプト エントリレベルおよびオールフラッシュFASストレージ システムにおけるルートデータ パーティシ ョニングの利点(39ページ) テイクオーバー処理やギブバック処理に対するHAポリシーの影響(28ページ) 関連情報 clustered Data ONTAP 8.3 物理ストレージ管理ガイド ディスク ファームウェアのバックグラウンド更新とテイクオーバー、ギ ブバック、およびアグリゲートの再配置 ディスク ファームウェアのバックグラウンド更新によるHAペアのテイクオーバー、ギブバック、およ びアグリゲートの再配置の処理に対する影響は、処理がどのように開始されたかによって異なりま す。 ディスク ファームウェアのバックグラウンド更新によるテイクオーバー、ギブバック、およびアグリゲ ートの再配置に対する影響は次のとおりです。 • いずれかのノードのディスクでディスク ファームウェアのバックグラウンド更新を実行中の場 合、手動で開始したテイクオーバー処理は、そのディスクでディスク ファームウェアの更新が完 了するまで保留されます。ディスク ファームウェアのバックグラウンド更新が120秒経っても完 了しないと、テイクオーバー処理は中止され、ディスク ファームウェアの更新の完了後に手動 で再開する必要があります。storage failover takeoverコマンド の‑bypass‑optimizationパラメータをtrueに設定してテイクオーバーを開始した場合は、デ スティネーション ノードでディスク ファームウェアのバックグラウンド更新を実行していても、テイ クオーバーには影響しません。 • ソース(テイクオーバー)ノードのディスクでディスク ファームウェアのバックグラウンド更新を実 行中の場合、storage failover takeoverコマンドの‑optionsパラメータをimmediateに 設定して手動で開始したテイクオーバー処理はただちに開始されます。 • ノードのディスクでディスク ファームウェアのバックグラウンド更新を実行中の場合に、そのノー ドがパニック状態になると、パニック状態になったノードのテイクオーバーが開始されます。 • いずれかのノードのディスクでディスク ファームウェアのバックグラウンド更新を実行中の場 合、データ アグリゲートのギブバックは、そのディスクでディスク ファームウェアの更新が完了 するまで保留されます。ディスク ファームウェアのバックグラウンド更新が120秒経っても完了し ないと、ギブバック処理は中止され、ディスク ファームウェアの更新の完了後に手動で再開す る必要があります。 • いずれかのノードのディスクでディスク ファームウェアのバックグラウンド更新を実行中の場 合、アグリゲートの再配置処理は、そのディスクでディスク ファームウェアの更新が完了するま で保留されます。ディスク ファームウェアのバックグラウンド更新が120秒経っても完了しない と、アグリゲートの再配置処理は中止され、ディスク ファームウェアの更新の完了後に手動で テイクオーバーとギブバックの概要 | 31 再開する必要があります。storage aggregate relocationコマンドの-overridedestination-checksパラメータをtrueに設定してアグリゲートの再配置を開始した場合は、 デスティネーション ノードでディスク ファームウェアのバックグラウンド更新を実行していても、 アグリゲートの再配置には影響しません。 ディスク所有権の種類 ディスクを所有するシステムのHAまたはDisaster Recovery(DR;ディザスタ リカバリ)の状態は、デ ィスクにアクセス可能なシステムに影響を及ぼす可能性があります。つまり、ディスクの所有権に はいくつかの種類があります。 ディスク所有権情報は、Data ONTAPまたは管理者によって設定され、コントローラ モジュールの 一意のシステムID(ノードのNVRAMカードまたはNVMEMボードで確認)の形式でディスクに記録 されます。 Data ONTAPでは、ディスク所有権情報は次のいずれかまたは複数の形式で表示されます。使用 される名前は状況によって若干異なります。 • 所有者(または現在の所有者) 現在ディスクにアクセスできるシステムです。 • 元の所有者(またはホーム所有者) システムがHAのテイクオーバーを実行中の場合は、所有者が、ノードをテイクオーバーしたシ ステムに変更されます。元の所有者(ホーム所有者)には、テイクオーバーの前にディスクを所 有していたシステムが反映されます。 • DRホーム所有者 システムがMetroClusterのスイッチオーバーを実行中の場合、DRホーム所有者には、スイッチ オーバーの発生前のホーム所有者フィールドの値が反映されます。 関連情報 clustered Data ONTAP 8.3 MetroClusterインストレーションおよび構成ガイド clustered Data ONTAP 8.3 MetroCluster管理およびディザスタ リカバリ ガイド clustered Data ONTAP 8.3 物理ストレージ管理ガイド ディスクおよびパーティションの所有権の表示 ディスク所有権を表示して、ストレージを制御しているノードを特定することができます。Data ONTAP 8.3から、共有ディスクを使用するシステムのパーティション所有権も表示できるようになり ました。 手順 1. storage disk show -ownershipコマンドを使用して、物理ディスクの所有権を表示します。 32 | ハイアベイラビリティ構成ガイド 例 cluster::> storage disk show -ownership Disk Aggregate Home Owner DR Home DR Home ID Reserver Pool -------- --------- -------- -------- ------------------ ----------- -----1.0.0 aggr0_2 node2 node2 2014941509 Pool0 1.0.1 aggr0_2 node2 node2 2014941509 Pool0 1.0.2 aggr0_1 node1 node1 2014941219 Pool0 1.0.3 node1 node1 2014941219 Pool0 ... Home ID Owner ID ---------- ----------2014941509 2014941509 2014941509 2014941509 2014941219 2014941219 2014941219 2014941219 2. システムで共有ディスクを使用している場合は、storage disk show -partitionownershipコマンドを使用して、パーティション所有権を表示します。 例 cluster::> storage disk show -partition-ownership Root Container Container Disk Aggregate Root Owner Owner ID Data Owner Owner Owner ID -------- --------- ----------- ----------- -------------------- ----------1.0.0 node1 1886742616 node1 node1 1886742616 1.0.1 node1 1886742616 node1 node1 1886742616 1.0.2 node2 1886742657 node2 node2 1886742657 1.0.3 node2 1886742657 node2 node2 1886742657 ... Data Owner ID ----------1886742616 1886742616 1886742657 1886742657 33 HAペアの計画 HAペアを計画するときは、推奨されるベストプラクティス、要件、および構成の種類について考慮 する必要があります。 HAペアのベストプラクティス HAペアが安定して機能するように設定するには、構成のベストプラクティスについて理解しておく 必要があります。 • ルート アグリゲートはデータの格納には使用しないようにします。ユーザ データをルート アグリ ゲートに格納すると、システムの安定性に悪影響が及び、HAペアのノード間でのストレージの フェイルオーバーに時間がかかります。 • 停電が発生してもすべての電源装置からの電力供給が停止することがないように、ストレージ システムの各電源装置を異なる送電網に接続します。 • フェイルオーバー ポリシーが定義されたLIF(論理インターフェイス)を使用して冗長性を確保 し、ネットワーク通信の可用性を高めます。 • HAペアの両方のノードで同じバージョンのData ONTAPを実行します。 • HAペアをアップグレードするときは、ドキュメントの手順に従います。 Clustered Data ONTAP 8.3 Upgrade and Revert/Downgrade Guide 注: Data ONTAP 8.2を実行するノードをData ONTAP 8.3以降に直接アップグレードすること はできません。Data ONTAP 8.2を実行するノードは、まず8.2リリース ファミリーの8.2.1以降 にアップグレードする必要があります。 • 2つのノード間で設定を統一します。 不統一な設定は、フェイルオーバーの問題につながります。 • 定期的(予定された保守作業時など)にフェイルオーバー機能をテストして、設定が適切である ことを確認します。 • テイクオーバー モード時に両方のノードの負荷に対応できるだけの十分なリソースが各ノード にあることを確認します。 • フェイルオーバーが正常に実行されるようにConfig Advisorツールを活用します。 • リモート管理がサポートされるシステム(サービス プロセッサを使用)の場合は、適切に設定し ます。 clustered Data ONTAP 8.3 システム アドミニストレーション ガイド(クラスタ管理) 34 | ハイアベイラビリティ構成ガイド • FlexVol、高密度ボリューム、Snapshotコピー、およびLUNの推奨される最大数を守って、テイク オーバーやギブバックの所要時間を短縮します。 HAペアにトラディショナル ボリュームやFlexVolを追加する場合は、テイクオーバーおよびギブ バックの所要時間を調べ、要件の範囲内であるかどうかを確認します。 • ディスクを使用するシステムの場合は、障害が発生したディスクがないかどうかを定期的に確 認し、できるだけ速やかに取り外します。 障害が発生したディスクがあると、テイクオーバー処理に時間がかかったり、ギブバック処理の 妨げになったりすることがあります。 clustered Data ONTAP 8.3 物理ストレージ管理ガイド • FAS22xxおよびFAS25xxシステムの冗長スタンバイ接続がない一部の構成ではシングルパス HAを使用しますが、それ以外のHAペアでは、いずれもマルチパスHAが必要です。 • テイクオーバー機能が無効になった場合に通知を受け取るようにするには、自動Eメール通知 の設定でtakeover impossible EMSメッセージを有効にします。 ◦ ha.takeoverImpVersion ◦ ha.takeoverImpLowMem ◦ ha.takeoverImpDegraded ◦ ha.takeoverImpUnsync ◦ ha.takeoverImpIC ◦ ha.takeoverImpHotShelf ◦ ha.takeoverImpNotDef • storage failover givebackコマンドで-only-cfo-aggregatesパラメータを使用すること は避けます。 関連タスク HAペア構成の確認(79ページ) HAペアの設定要件および制限事項 新しいHAペアの設定時には、特定の要件と制限事項に従う必要があります。これらの要件に従え ば、HAペア設計によるデータ可用性の利点を活用するのに役立ちます。 新しいHAペアの設定時には、次の要件および制限事項に留意してください。 • アーキテクチャの整合性 両方のノードのシステム モデルが同じで、同じバージョンのData ONTAPソフトウェアおよびシ ステム ファームウェアを実行している必要があります。サポートされるストレージ システムは Data ONTAPのリリース ノートに記載されています。 HAペアの計画 | 35 clustered Data ONTAP 8.3リリース ノート Clustered Data ONTAP Storage Platform Mixing Rules • 不揮発性メモリ(NVRAMまたはNVMEM)のサイズとバージョンの整合性 システムの不揮発性メモリのサイズとバージョンがHAペアの両方のノードで同じである必要が あります。 • ストレージ容量 ◦ ディスクまたはアレイLUNの数が最大構成容量を超えてはなりません。 ◦ 各ノードに接続されているストレージの合計数がシングル ノードの容量を超えてはなりませ ん。 ◦ 標準のディスクとアレイLUNの両方を使用する場合は、ディスクとアレイLUNの合計を最大 構成容量以内にする必要があります。 ◦ 各ノードに接続されているストレージの合計数がシングル ノードの容量を超えてはなりませ ん。 ◦ ディスク、アレイLUN、またはその両方を使用するシステムの最大容量を確認するには、 Hardware Universe(hwu.netapp.com)を参照してください。 注: フェイルオーバー後は、テイクオーバー ノードが一時的にHAペアのすべてのストレージ のデータを処理します。 • ディスクとディスク シェルフの整合性 ◦ HAペアでは、FC、SATA、およびSASのストレージがサポートされます。 ◦ SATAディスクまたはSASディスクと同じループにFCディスクを混在させることはできません。 ◦ 同一のループまたはスタックで異なる種類の接続を組み合わせることはできません。 ◦ 同じノードの別々のスタックまたはループでは、異なる種類のストレージを使用できます。必 要に応じて、ノードとパートナー ノードをそれぞれ異なる種類のストレージ専用にすることも できます。 NetApp Hardware Universe clustered Data ONTAP 8.3 物理ストレージ管理ガイド ◦ FAS22xxおよびFAS25xxシステムの冗長スタンバイ接続がない一部の構成ではシングルパ スHAを使用しますが、それ以外のHAペアでは、いずれもマルチパスHAが必要です。 • ルート ボリュームのメールボックス ディスクまたはアレイLUN ◦ ルート ボリュームがディスク シェルフにある場合は2本のディスクが必要です。 ◦ ルート ボリュームがストレージ アレイにある場合は1つのアレイLUNが必要です。 • インターコネクト アダプタとケーブル 36 | ハイアベイラビリティ構成ガイド HAインターコネクト アダプタとケーブルが取り付けられていなければなりません(ただし、シャ ーシおよび内部インターコネクト内に2つのコントローラを持つシステムを除きます)。 • ネットワーク接続 両方のノードを同じネットワークに接続し、Network Interface Card(NIC;ネットワーク インターフ ェイス カード)またはオンボード イーサネット ポートを正しく設定する必要があります。 • システム ソフトウェア 両方のノードに、SyncMirror、Server Message Block(SMB;サーバ メッセージ ブロック) / Common Internet File System(CIFS)、Network File System(NFS)など、同じシステム ソフトウェ アのライセンスを付与し、有効にする必要があります。 注: テイクオーバーが発生した場合にテイクオーバー ノードが提供できるのは、ライセンスが インストールされている機能のみです。パートナー ノードでデータ操作に使用していたライセ ンスがテイクオーバー ノードにインストールされていない場合、テイクオーバー後にHAペア は機能しなくなります。 • アレイLUNを使用するシステム HAペアでアレイLUNを使用する場合は、両方のノードで同じアレイLUNを検出できる必要があ ります。 注: あるLUNへの読み取りおよび書き込みアクセスを実行できるのは、そのLUNの所有者と して設定されたノードのみです。テイクオーバー処理の実行中は、エミュレートされたストレー ジ システムがLUNへの読み取りおよび書き込みアクセスを実行します。 • オールフラッシュで最適化されたシステム オールフラッシュで最適化されたFAS80xxシリーズ システムの場合、HAペアの両方のノードが オールフラッシュで最適化されたされている必要があります。 注: HAペアの両方のノードがオールフラッシュで最適化されていない場合、Data ONTAPは AutoSupportメッセージによる不一致の警告を自動的に生成します。 関連参照情報 手動テイクオーバーの実行および監視用コマンド(107ページ) ミラーHAペアの設定要件および制限事項 ミラーHAペアの設定要件および制限事項には、標準HAペアの設定要件および制限事項に加え、 ディスク プールの割り当てとケーブル接続に関する要件があります。 • プールが適切に設定されていることを確認する必要があります。 ◦ 同一プレックスのディスクまたはアレイLUNは同一プールに属し、他方のプレックスのディス クまたはアレイLUNは、他方のプールに属している必要があります。 HAペアの計画 | 37 ◦ 各プールには、ディスクまたはアレイLUNの障害に対応するために十分なスペアが必要で す。 ◦ 単一点障害となることがあるため、ミラーの両方のプレックスを同じディスク シェルフに配置 しないようにします。 • storage failoverコマンドの-modeオプションをhaに設定する必要があります。 • アレイLUNを使用する場合、アレイLUNのパスを冗長構成にする必要があります。 関連参照情報 HAモードの設定用コマンド(76ページ) 関連情報 clustered Data ONTAP 8.3 データ保護ガイド ハードウェア アシスト テイクオーバーの要件 ハードウェア アシスト テイクオーバー機能は、リモート管理用にサービス プロセッサ モジュールが 設定されたシステムで使用できます。リモート管理は、リモート アクセス、監視、トラブルシューティ ング、ロギング、警告など、リモート プラットフォーム管理機能を提供します。 ハードウェア アシスト テイクオーバーは、両方のノードでリモート管理が設定されたシステムでは 両方のノードに対して有効になりますが、HAペアの場合は、2つのシステムのうちの一方でしかリ モート管理が設定されていなくてもサポートされます。HAペアの両方のノードでリモート管理を設 定する必要はありません。リモート管理を使用すると、リモート管理がインストールされたシステム で発生した障害を検出できるため、それらのシステムで障害が発生した場合のテイクオーバー時 間が短縮されます。 関連情報 clustered Data ONTAP 8.3 システム アドミニストレーション ガイド(クラスタ管理) 1組のHAペアで構成されるクラスタの場合 2つのノードで構成されるクラスタでは、ストレージ フェイルオーバーを有効にするとクラスタのハイ アベイラビリティ(HA)が自動的に有効になり、デフォルトで自動ギブバックが有効になります。3つ 以上のノードで構成されるクラスタでは、自動ギブバックがデフォルトで無効になり、クラスタHAが 自動的に無効になります。 2つのノードだけで構成されるクラスタには、クォーラムの維持に関して、クラスタの過半数のノード の接続状態を良好に保つという特有の課題があります。 2ノード クラスタでは、マスターのノードを 示すイプシロンの値がどちらのノードにも設定されません (ノードが3つ以上のノードではイプシロ ンが必要です)。代わりに、両方のノードを継続的にポーリングすることで、テイクオーバーの発生 38 | ハイアベイラビリティ構成ガイド 時に稼働しているノードを特定し、データに対する完全な読み取り / 書き込みアクセス権、および 論理インターフェイスと管理機能に対するアクセス権をそのノードに割り当てます。この継続的なポ ーリング機能のことをクラスタ ハイアベイラビリティ(クラスタHA)と呼びます。 クラスタHAは、HAペアおよびstorage failoverコマンドで実現されるハイアベイラビリティとは 別のものです。フェイルオーバー後にクラスタが完全に機能するにはストレージ フェイルオーバー 機能が不可欠ですが、クラスタHAにはそのフェイルオーバー機能はありません。 関連コンセプト 2ノードのスイッチレス クラスタの場合(16ページ) 関連タスク 2ノード クラスタでのクラスタHAとスイッチレス クラスタの有効化(77ページ) 関連参照情報 テイクオーバーを伴わないノードの停止またはリブート(104ページ) 関連情報 clustered Data ONTAP 8.3 システム アドミニストレーション ガイド(クラスタ管理) HAペアに使用できるストレージ構成 HAペアは、ストレージの管理やパフォーマンスに関する要件に応じて、対称構成、非対称構成、 アクティブ / パッシブ ペア、または共有ディスク シェルフ スタックのいずれかとして構成することが できます。 対称(アクティブ / アクティブ)構成 対称構成のHAペアでは、各ノードに同じ量のストレージを配置します。 非対称構成 非対称構成の標準HAペアでは、一方のストレージの容量が他方のストレージより大き くなっています。ただし、いずれのノードもノードの最大容量を超えることはできません。 アクティブ / パッシブ構成 この構成では、パッシブ ノードにはルート ボリュームしかなく、残りのストレージはすべ てアクティブ ノードにあります。通常動作中はすべてのデータ要求をアクティブ ノードが 処理します。パッシブ ノードがデータ要求に応じるのは、アクティブ ノードの動作をテイ クオーバーした場合だけです。 共有ループまたは共有スタック この構成では、ノード間でループやスタックを共有できます。上記のアクティブ / パッシブ 構成の場合にはこの方法が特に適しています。 HAペアの計画 | 39 エントリレベルおよびオールフラッシュFASストレージ システムにおけ るルートデータ パーティショニングの利点 Data ONTAP 8.3以降では、ルートデータ パーティショニング(共有ドライブとも呼ばれます)を使用 して、エントリレベルおよびオールフラッシュFAS(AFF)のプラットフォーム モデルの使用可能なシ ステム容量を大幅に増やすことができます。 ルートデータ パーティショニングを使用すると、ルート アグリゲートに使用されるスペースを削減 し、より多くのスペースをデータ アグリゲート用に確保することで、ストレージ利用率を高めること ができます。 注: ルートデータ パーティショニングはData ONTAP 8.3で導入された機能であるため、次の処理 を実行する場合は、ドライブのパーティショニングを事前に解除しておく必要があります。 • ルートデータ パーティショニングを使用するシステムを以前のバージョンのData ONTAPにリ バートする場合 • パーティショニングされたストレージを以前のバージョンのData ONTAPを実行するシステム に移行する場合 関連情報 clustered Data ONTAP 8.3 物理ストレージ管理ガイド ルートデータのパーティショニングの機能 エントリレベルおよびAll Flash FAS(AFF;オールフラッシュFAS)のプラットフォーム モデルでは、ド ライブ全体ではなくドライブの一部でアグリゲートを構成できます。 通常、ルートデータのパーティショニングは工場出荷前に有効になっており、設定も済んでいます。 また、ブート メニューのオプション4を使用してシステムの初期化を開始することによってルートデ ータのパーティショニングを設定することもできます。システムの初期化を実行すると、ノードのディ スクのデータがすべて消去され、ノード構成が工場出荷時のデフォルトの設定にリセットされます。 ルートデータのパーティショニングを使用するようにノードが設定されている場合、パーティショニン グされたディスクには2つのパーティションがあります。 40 | ハイアベイラビリティ構成ガイド 小さいほうのパーティションはルート アグリゲートの構成に使用されます。大きいほうのパーティシ ョンはデータ アグリゲートで使用されます。パーティションのサイズはData ONTAPで設定され、シ ステムの初期化時にルート アグリゲートを構成するために使用するディスクの数によって異なりま す (アグリゲートを構成するために使用するディスクの数が多いほど、ルート パーティションのサイ ズは小さくなります)。システムの初期化後、パーティションのサイズは固定されます。システムの 初期化後にパーティションまたはディスクをルート アグリゲートに追加すると、ルート アグリゲート のサイズが拡張されますが、ルート パーティションのサイズは変わりません。 パーティションは物理ディスクと同じようにRAIDで使用され、適用される要件もまったく同じです。 たとえば、パーティショニングされたドライブで構成されるRAIDグループにパーティショニングされ ていないドライブを追加すると、パーティショニングされていないドライブがRAIDグループ内のドラ イブのパーティションのサイズに合わせてパーティショニングされ、残りのディスクは使用されませ ん。 パーティショニングされたディスクを別のノードに移動したり、別のアグリゲートで使用したりしても、 パーティショニングは維持されます。パーティショニングされたディスクで構成されるRAIDグループ でのみディスクを使用できます。 ルートデータのパーティショニングの標準的なレイアウト ルート アグリゲートは出荷時に設定されているので、変更することはできません。ただし、要件に 応じて、複数の異なる構成でデータ パーティションを使用できます。 次の図は、パーティショニングされたディスクが12本あるアクティブ / パッシブ構成のパーティション を設定する1つの方法を示しています。ルート アグリゲートは2つ(各ノードに1つ)あり、複数の小さ なパーティションで構成されています。各ルート アグリゲートにはスペア パーティションが1つありま す。RAID-DPデータ アグリゲートは1つだけです。このアグリゲートには、2つのパリティ ディスク パーティションと1つのスペア パーティションが含まれます。 次の図は、パーティショニングされたディスクが12本あるアクティブ / アクティブ構成のパーティショ ンを設定する1つの方法を示しています。この場合、RAID-DPデータ アグリゲートは2つあり、それ ぞれに専用のデータ パーティション、パリティ パーティション、およびスペア パーティションが含ま HAペアの計画 | 41 れます。各ディスクは1つのノードにのみ割り当てられます。これは、1本のディスクに障害が発生し た場合に両方のノードに影響が及ぶことを回避するためのベストプラクティスです。 データ パーティション、パリティ パーティション、およびスペア パーティションに使用するディスクの 構成は、この図とまったく同じにはならない場合もあります。たとえば、複数のパリティ パーティショ ンが必ずしも同じディスクにアライメントされるとは限りません。 ルートデータのパーティショニングの使用に関する要件 ほとんどの場合、ルートデータのパーティショニング用にパーティショニングされたドライブは、共有 されない物理ドライブとまったく同じように使用できます。ただし、構成によってはルートデータのパ ーティショニングを使用できません。 次のストレージ デバイスをパーティショニングすることはできません。 • アレイ LUN • 内蔵ドライブとして使用できないタイプのHDD(ATA、FCAL、およびMSATA) • 100GB SSD 次のテクノロジではルートデータのパーティショニングを使用できません。 • MetroCluster • RAID 4 パーティショニングされたドライブで構成されるアグリゲートのRAIDタイプはRAID-DPである必 要があります。 42 | ハイアベイラビリティ構成ガイド 関連情報 clustered Data ONTAP 8.3 物理ストレージ管理ガイド HAペアとストレージ システムのモデルの種類 ストレージ システムのモデルによって、サポートされるHA構成が一部異なります。具体的には、 HAペアの物理的な構成や、HAペアと認識される方法が違います。 注: HAペアの物理的な構成は、HAペアのノードにおけるクラスタのケーブル配線には影響しま せん。 シングルシャーシとデュアルシャーシのHAペア HAペアを構成するときは、ストレージ システムのモデルに応じて、2つのコントローラを1台のシャ ーシに搭載する方法と、2つのコントローラを別々のシャーシに搭載する方法があります。どちらの 方法でも構成できるモデルもあれば、シングルシャーシのHAペアまたはデュアルシャーシのHAペ アのどちらかとしてしか構成できないモデルもあります。 シングルシャーシのHAペアの例を次に示します。 シングルシャーシのHAペアでは、両方のコントローラを同じシャーシに搭載します。HAインターコ ネクトは内部のバックプレーンで確立され、外部のケーブル接続は必要ありません。 デュアルシャーシのHAペアとHAインターコネクト ケーブルの例を次に示します。 HAペアの計画 | 43 デュアルシャーシのHAペアでは、コントローラを別々のシャーシに搭載します。HAインターコネク トは外部のケーブル接続で確立されます。 HA構成を切り替え可能なシステムのインターコネクトのケーブル接続 シングルシャーシまたはデュアルシャーシのHAペアとして構成できるシステムでは、どちらの構成 であるかによってインターコネクトのケーブル接続が異なります。 次の表に、32xxおよび62xxのシステムのインターコネクトのケーブル接続を示します。 HAペアのコントローラ モジ ュールの配置 HAインターコネクトのケーブル接続 両方を同じシャーシに配置 不要(内部インターコネクトが使用されます) それぞれ異なるシャーシに 配置 必要 HA構成とHAの状態のPROM値 一部のコントローラ モジュールとシャーシでは、 HAペアとスタンドアロンのどちらであるかが PROMに自動的に記録されます。これは HAの状態を示すレコードであり、スタンドアロン システム 内または HAペア内のすべてのコンポーネントで同じでなければなりません。HAの状態は、必要 に応じて手動で設定できます。 関連タスク コントローラ モジュールとシャーシのHA状態の確認と設定(74ページ) ストレージ システム モデルと対応するHA構成 サポートされるストレージ システムのHA構成は、モデルごとに異なります。 次の表は、サポートされるストレージ システムとそのHA構成を示しています。 ストレージ システム モ デル HA構成(シングルシャーシま インターコネクトの種類(内部 InfiniBand、外部InfiniBand、 たはデュアルシャーシ) また外部10Gbイーサネット) PROMの HAの状態 値を使用す るか FAS8080 シングルシャーシまたはデュ アルシャーシ ○ FAS8060 シングルシャーシ • デュアルシャーシ:外部 InfiniBand(I/O拡張モジュー ルのポートを使用) • シングルシャーシ:内部 InfiniBand 内部InfiniBand ○ 44 | ハイアベイラビリティ構成ガイド ストレージ システム モ デル HA構成(シングルシャーシま インターコネクトの種類(内部 InfiniBand、外部InfiniBand、 たはデュアルシャーシ) また外部10Gbイーサネット) PROMの HAの状態 値を使用す るか FAS8040 シングルシャーシ 内部InfiniBand ○ FAS8020 シングルシャーシ 内部InfiniBand ○ 6290 シングルシャーシまたはデュ アルシャーシ • デュアルシャーシ:外部 InfiniBand(NVRAMアダプタ を使用) • シングルシャーシ:内部 InfiniBand • デュアルシャーシ:外部 InfiniBand(NVRAMアダプタ を使用) • シングルシャーシ:内部 InfiniBand • デュアルシャーシ:外部 InfiniBand(NVRAMアダプタ を使用) • シングルシャーシ:内部 InfiniBand • デュアルシャーシ:外部 InfiniBand(NVRAMアダプタ を使用) • シングルシャーシ:内部 InfiniBand • デュアルシャーシ:外部 InfiniBand(NVRAMアダプタ を使用) • シングルシャーシ:内部 InfiniBand 6280 6250 6240 6220 シングルシャーシまたはデュ アルシャーシ シングルシャーシまたはデュ アルシャーシ シングルシャーシまたはデュ アルシャーシ シングルシャーシまたはデュ アルシャーシ ○ ○ ○ ○ ○ HAペアの計画 | 45 ストレージ システム モ デル HA構成(シングルシャーシま インターコネクトの種類(内部 InfiniBand、外部InfiniBand、 たはデュアルシャーシ) また外部10Gbイーサネット) PROMの HAの状態 値を使用す るか 6210 シングルシャーシまたはデュ アルシャーシ ○ 3250 3220 シングルシャーシまたはデュ アルシャーシ シングルシャーシまたはデュ アルシャーシ • デュアルシャーシ:外部 InfiniBand(NVRAMアダプタ を使用) • シングルシャーシ:内部 InfiniBand • デュアルシャーシ:外部10Gb イーサネット(オンボード ポー トのc0aおよびc0bを使用) これらのポートは、HAインタ ーコネクトの専用のポートで す。システムの構成に関係な く、データ用など、他の目的に 使用することはできません。 • シングルシャーシ:内部 InfiniBand • デュアルシャーシ:外部10Gb イーサネット(オンボード ポー トのc0aおよびc0bを使用) これらのポートは、HAインタ ーコネクトの専用のポートで す。システムの構成に関係な く、データ用など、他の目的に 使用することはできません。 • シングルシャーシ:内部 InfiniBand ○ ○ FAS25xx シングルシャーシ 内部InfiniBand ○ FAS22xx シングルシャーシ 内部InfiniBand ○ 46 | ハイアベイラビリティ構成ガイド HAペアの設置とケーブル接続 標準またはミラー構成の新しいHAペアを設置してケーブル接続するには、適切な工具と機器を使 用する必要があります。また、コントローラをディスク シェルフに接続する必要があります。 デュア ルシャーシのHAペアの場合は、ノード間のHAインターコネクトも接続する必要があります。 HAペ アは、ネットアップのシステム キャビネットまたは装置ラックに設置できます。 用語Vシリーズ システムとは、アレイLUNを使用可能なData ONTAP 8.2.1以前のリリースのストレ ージ システムを指します。Data ONTAP 8.2.1以降にリリースされたFASシステムでは、適切なライ センスがインストールされていれば、アレイLUNを使用できます。 具体的な手順は、構成の次の内容によって異なります。 • HAペアは標準構成かミラー構成か • FCディスク シェルフとSASディスク シェルフのどちらを使用するか 注: HAペア構成にSASディスク シェルフが含まれている場合は、HAペアのドキュメントを参 照してください。ノード間のHAインターコネクトのケーブル接続については、このガイドの手 順に従ってください。 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 FAS22xxおよびFAS25xxシステムの冗長スタンバイ接続がない一部の構成ではシングルパスHA を使用しますが、それ以外のHAペアでは、いずれもマルチパスHAが必要です。 関連情報 clustered Data ONTAP 8.3 データ保護ガイド システム キャビネットまたは装置ラックの設置 HAペアは、1台以上のネットアップ システム キャビネットまたは標準Telcoタイプ装置ラックに設置 する必要があります。これらの選択肢には、それぞれ要件があります。 装置ラック型HAペア 発注したストレージ サイズによっては、装置を1つ以上のTelcoタイプ装置ラックに取り付ける必要 があります。 装置ラックの下段には、ノードを1つまたは2つ搭載し、さらに8台以上のディスク シェルフを取り付 けることができます。ディスク シェルフとノードを装置ラックに設置する方法については、装置に同 梱の該当マニュアルを参照してください。 HAペアの設置とケーブル接続 | 47 ネットアップのマニュアル:「Product Library A-Z」 システム キャビネット型HAペア HAペアを発注した場合、ディスク シェルフの数に応じて、単一または複数のシステム キャビネット に搭載されて納入されます。 納入されるシステム キャビネット数は、発注したストレージ サイズによって異なります。ネットワー キング アダプタ、ファイバチャネル アダプタなどのすべての内部アダプタが、ノードに取り付けられ た状態で納入されます。 単一のシステム キャビネットの場合、チャネルAとチャネルBの両方のディスク シェルフがケーブ ル接続され、HAアダプタも事前に接続された状態で納入されます。 発注したHAペアが複数のキャビネットで納入された場合は、ディスク シェルフのケーブル接続を 自分で行う必要があります。具体的には、ローカル ノードをパートナー ノードのディスク シェルフに 接続し、パートナー ノードをローカル ノードのディスク シェルフに接続します。また、NVRAM HAイ ンターコネクトをケーブル接続して、ノードを互いに接続する必要もあります。HAペアでスイッチを 使用する場合は、付属のスイッチ マニュアルに従って、スイッチを取り付ける必要があります。シ ステム キャビネットを相互に接続しなければならない場合もあります。システム キャビネットの接 続方法については、『System Cabinet Guide』を参照してください。 必要なマニュアル HAペアを設置するときは、適切なマニュアルを参照する必要があります。 次の表に、新規HAペアを準備する場合または2つのスタンドアロン システムをHAペアに変換する 場合に参照するマニュアルおよびその概要を示します。 マニュアル名 説明 NetApp Hardware Universe NetAppの機器を取り付ける際のサイトの物理 的要件が記載されています。 該当するシステム キャビネット ガイド システム キャビネットにNetAppの機器を取り 付ける方法が記載されています。 該当するディスク シェルフ ガイド ストレージ システムにディスク シェルフを接続 する方法が記載されています。 ご使用のストレージ システム モデルに該当す るハードウェア マニュアル ストレージ システムを取り付けて、ネットワーク に接続し、初回起動を行う方法が記載されて います。 『診断ガイド』 ストレージ システムで実行できる診断テストが 記載されています。 Clustered Data ONTAP 8.3 Network Management Guide ストレージ システムのネットワーク設定を行う 方法が記載されています。 48 | ハイアベイラビリティ構成ガイド マニュアル名 説明 Clustered Data ONTAP 8.3 Upgrade and Revert/Downgrade Guide ストレージ システムとディスク ファームウェア のアップグレード方法、およびストレージ シス テム ソフトウェアのアップグレード方法が記載 されています。 clustered Data ONTAP 8.3 データ保護ガイド ミラーHAペアで用いられるSyncMirrorテクノロ ジなどが記載されています。 clustered Data ONTAP 8.3 システム アドミニス トレーション ガイド(クラスタ管理) ストレージ システムの管理全般(クラスタへの ノードの追加など)について記載されていま す。 FlexArray仮想化インストール要件およびリファ Data ONTAPシステムのHAペアを設置する場 レンス ガイド 合の、Data ONTAPシステムとストレージ アレ イへのケーブル接続について記載されていま す。 Data ONTAPシステムで使用するストレージ ア レイの設定については、Data ONTAPシステム の導入ガイドに記載されています。 FlexArray仮想化実装ガイド(サードパーティ製 ストレージ) Data ONTAPシステムのHAペアを設置する場 合の、Data ONTAPシステムで使用するストレ ージ アレイの設定について記載されていま す。 関連情報 ネットアップのマニュアル:「Product Library A-Z」 必要な工具 HAペアを設置するときは、適切な工具を使用する必要があります。 HAペアを設置するには、次の工具が必要です。 • No.1およびNo.2プラス ドライバ • ハンドレベル • マーカー HAペアの設置とケーブル接続 | 49 必要な機器 納入されたHAペアには、次の表に記載された機器が付属しています。ストレージ システムの種類 やストレージ容量などを確認するには、Hardware Universe(hwu.netapp.com)を参照してください。 必要な機器 詳細 ストレージ システム 同じ種類のストレージ システム2つ ストレージ Hardware Universe(hwu.netapp.com)を参照し てください。 HAインターコネクト アダプタ カード(該当する コントローラ モジュールで1つのシャーシを共 有しない場合) 注: デュアルシャーシのHAペアの32xxシス テムの場合、c0aとc0bの10GbEポートがHA インターコネクト ポートとして使用されます。 これらのシステムでは、HAインターコネクト アダプタは必要ありません。 32xxシステムのc0aポートとc0bポートは、構 成に関係なく、データ用に使用することはで きません。これらはHAインターコネクト専用 のポートです。 InfiniBand(IB)HAアダプタ (該当するストレージ システムでは、NVRAM アダプタ カードがHAインターコネクト アダプタ として機能) Hardware Universe(hwu.netapp.com)を参照し てください。 SASディスク シェルフ:SAS HBA(該当する場 合) DS14ディスク シェルフ:FC-ALアダプタまたは FC HBA(FC HBA for Disk)アダプタ(該当す る場合) 2つ以上のSAS HBAまたはFC-ALアダプタ(オ ンボード ポートへの接続も可能) ファイバチャネル スイッチ(該当する場合) サポートされない SFP(Small Form-factor Pluggable)モジュール (該当する場合) サポートされない NVRAM HAアダプタ メディア コンバータ 光ファイバを使用して接続する場合のみ 50 | ハイアベイラビリティ構成ガイド 必要な機器 詳細 ケーブル(特に注記がないかぎり、出荷時に付 属) • FCディスク シェルフ接続を使用するシステ ムの場合、コントローラとディスク シェルフ を接続する光ケーブル(各ループに2本) • SASディスク シェルフ接続を使用するシス テムの場合、コントローラとディスク シェル フを接続するSASケーブル(各スタックに2 本) • ディスク シェルフ同士を接続する複数のケ ーブル(該当する場合) • IB HAインターコネクト アダプタを使用する システムの場合、4xIB銅ケーブル×2、4xIB 光ケーブル×2、またはメディア コンバータ を備えた光ケーブル×2 注: 接続距離が30mを超える場合は、長 い光ケーブルを別途購入する必要があ ります。 • デュアルシャーシのHAペアの32xxシステ ムの場合、HAインターコネクト用に10GbE 光ケーブル(TwinaxまたはSR)が必要 装置の準備 ノードは、設置タイプに応じて、システム キャビネットまたは装置ラックに設置する必要がありま す。 装置ラックへのノードの設置 ノードを互いに接続する前に、ノードとディスク シェルフを装置ラックに設置し、ディスク シェルフに ラベルを貼付し、ノードをネットワークに接続する必要があります。 手順 1. ディスク シェルフのガイド、ハードウェア マニュアル、またはセットアップ ガイドの説明に従っ て、装置ラックにノードを取り付けます。 2. 該当するディスク シェルフのガイドの説明に従って、装置ラックにディスク シェルフを取り付け ます。 3. 必要に応じて、インターフェイスにラベルを付けます。 HAペアの設置とケーブル接続 | 51 4. ご使用のシステムのセットアップ手順に従って、ノードをネットワークに接続します。 タスクの結果 これでノードが正しく設置され、ネットワークに接続されたので、電源を投入できます。 終了後の操作 HAペアのケーブル接続に進みます。 システム キャビネットへのノードの設置 ノードを互いに接続する前に、システム キャビネット、ノード、およびディスク シェルフを設置し、ノ ードをネットワークに接続する必要があります。キャビネットが2台ある場合は、それを相互接続す る必要があります。 手順 1. システム キャビネット、ノード、およびディスク シェルフを『System Cabinet Guide』の説明に従っ て設置します。 複数のシステム キャビネットを使用する場合は、前面と背面のドア、および側面パネルを取り 外し、システム キャビネットを連結します。 2. ご使用のシステムのセットアップ ガイドの説明に従って、ノードをネットワークに接続します。 3. システム キャビネットを適切な電源に接続し、キャビネットに給電します。 タスクの結果 これでノードが正しく設置され、ネットワークに接続されたので、電源を投入できます。 終了後の操作 HAペアのケーブル接続に進みます。 標準HAペアのケーブル接続 標準HAペアのケーブル接続を行うには、各ノードで使用するポートを特定する必要があります。 そのあと、それらのポートをケーブル接続し、HAインターコネクトをケーブル接続します。 タスク概要 ここでは、DS14mk2 ATまたはDS14mk4 FCディスク シェルフを使用する構成についてのケーブル 接続手順を説明します。 SASディスク シェルフを使用するHAペア構成の場合は、ネットアップ サポート サイトのドキュメント を参照してください。 52 | ハイアベイラビリティ構成ガイド 注: アレイLUNを使用するHAペア構成の場合は、Data ONTAPシステムをストレージ アレイにケ ーブル配線する際に特定の手順に従う必要があります。 FlexArray仮想化インストール要件およびリファレンス ガイド Data ONTAPで使用するストレージ アレイの設定については、ネットアップ サポート サイトのドキ ュメントを参照してください。 FlexArray仮想化実装ガイド(サードパーティ製ストレージ) HAインターコネクトのケーブル接続に関するセクションの内容は、ディスク シェルフの種類に関係 なくすべてのシステムに適用されます。 手順 1. ファイバチャネル ディスク シェルフの接続に使用するファイバチャネル ポートの特定(52ペー ジ) 2. DS14mk2 ATまたはDS14mk4 FCディスク シェルフへのノードAのケーブル接続 (53ページ) 3. DS14mk2 ATまたはDS14mk4 FCディスク シェルフへのノードBのケーブル接続 (55ページ) 4. HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxまたはFAS80xx以外の すべてのシステム)(57ページ) 5. HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxシステム) (58ページ) 6. HAインターコネクトのケーブル接続(別々のシャーシに搭載されたFAS80xxシステム)(59ペ ージ) 関連情報 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 ファイバチャネル ディスク シェルフの接続に使用するファイバチャネル ポートの特定 HAペアのケーブル接続を行う前に、各ストレージ システムとディスク シェルフの接続に使用する ファイバチャネル ポートとそれらを接続する順番を特定する必要があります。 使用するポートを特定する際には、次の点に留意する必要があります。 • HAペアのディスク シェルフ ループごとに、プライマリ接続用と冗長なマルチパスHA接続用に1 つずつ、2つのポートが必要になります。 各ノードにループが1つある標準HAペアでは、それぞれのノードで4つのポートを使用します。 • 拡張アダプタのポートを使用する前に、オンボードのファイバチャネル ポートを使用してくださ い。 • HAペアのケーブル接続に使用する各種アダプタの正確な拡張スロット割り当て情報について は、Hardware Universe(hwu.netapp.com)を参照してください。 HAペアの設置とケーブル接続 | 53 • ファイバチャネルHBAを使用している場合は、両システムの同じスロットにアダプタを取り付け ます。 ポートを特定したら、両ノードのファイバチャネル ポートの番号リスト(ポート1から)を作成します。 4ポート ファイバチャネルHBAのケーブル接続のガイドライン 4ポート4GbのファイバチャネルHBAのポートを使用する場合は、次の手順に従い、記載されてい る参照マニュアルも併用しながら、接続作業を進めてください。 • まず、ESH4モジュールを使用するディスク シェルフ ループを4ポートHBAに接続する必要があ ります。 • 4ポートHBAのポートを使用する前に、AT-FCXモジュールを使用するディスク シェルフ ループ を2ポートHBAのポートまたはオンボード ポートに接続する必要があります。 • HBAのポートAをループ内の最初のディスク シェルフのチャネルA入力ポートに接続する必要 があります。 パートナー ノードのHBAのポートAをループ内の最初のディスク シェルフのチャネルB入力ポ ートに接続する必要があります。これにより、両ノードのディスク名が同じになります。 • その他のディスク シェルフ ループをHBAのポートを使用して順番に接続する必要があります。 最初のループにポートA、次のループにポートBのように使用していきます。 • 残りのディスク シェルフ ループをすべて接続したあと、該当する場合は、ポートCやポートDを 冗長なマルチパスHA接続に使用する必要があります。 • HBAのドキュメントおよびHardware Universeに記載されたその他のケーブル接続ルールも必 ず確認してください。 DS14mk2 ATまたはDS14mk4 FCディスク シェルフへのノードAのケーブル接続 ノードAをケーブル接続するには、すでに特定したファイバチャネル ポートを使用して、これらのポ ートに、ノードが所有するディスク シェルフ ループをケーブル接続する必要があります。 タスク概要 • この手順ではマルチパスHAを使用します。マルチパスHAはすべてのシステムに必要です。 • この手順はSASディスク シェルフには適用されません。 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 注: システムのその他のケーブル配線図については、ネットアップ サポート サイトでご使用のシ ステムのセットアップ ガイドを参照してください。 54 | ハイアベイラビリティ構成ガイド 手順 1. ケーブル接続の手順に進む前に、ケーブル配線図を確認します。 • 図の丸で囲まれた番号は、手順の番号に対応します。 • ディスク シェルフの入力および出力ポートの位置は、ディスク シェルフのモデルによって異 なります。 図に示されているポートの位置ではなく、必ずディスク シェルフのラベルを確認してくださ い。 • コントローラのファイバチャネル ポートの位置は特定のストレージ システム モデルを示した ものではありません。構成に使用するポートの位置は、実際に確認するか、ご使用のモデ ルのセットアップ ガイドに従って判別してください。 • ポート番号は、作成したファイバチャネル ポートのリストにある番号です。 • この図では、各ノードに1つのループ、各ループに1台のディスク シェルフのみを使用してい ます。 実際には、ループ数やディスク シェルフ数がもっと多い場合、またはノード間でディスク シェ ルフ数が異なる場合もあります。 2. ノードAのファイバチャネル ポート1をノードAループ1の最初のディスク シェルフのチャネルA入 力ポートに接続します。 3. ノードAのディスク シェルフのチャネルA出力ポートをループ1の次のディスク シェルフのチャネ ルA入力ポートに接続します。 HAペアの設置とケーブル接続 | 55 4. ループ1の残りのディスク シェルフについて手順3を繰り返します。 5. ループの最後のディスク シェルフのチャネルA出力ポートをノードBのファイバチャネル ポート B4に接続します。 これにより、チャネルAに対する冗長なマルチパスHA接続が確立されます。 6. ノードAのファイバチャネル ポート2をノードBループ1の最初のディスク シェルフのチャネルB入 力ポートに接続します。 7. ノードBのディスク シェルフのチャネルB出力ポートをループ1の次のディスク シェルフのチャネ ルB入力ポートに接続します。 8. ループ1の残りのディスク シェルフについて手順7を繰り返します。 9. ループの最後のディスク シェルフのチャネルB出力ポートをノードBのファイバチャネル ポート B3に接続します。 これにより、チャネルBに対する冗長なマルチパスHA接続が確立されます。 10. HAペアの各ループ ペアについて手順2~9を繰り返します。次のループにはポート3と4を使用 し、その次のループにはポート5と6を使用するという具合に作業を続けます。 タスクの結果 ノードAのケーブル接続が完了しました。 終了後の操作 ノードBのケーブル接続に進みます。 DS14mk2 ATまたはDS14mk4 FCディスク シェルフへのノードBのケーブル接続 ノードBをケーブル接続するには、前の手順で特定したファイバチャネル ポートに、ノードに割り当 てられたディスク シェルフ ループをケーブル接続する必要があります。 タスク概要 • この手順ではマルチパスHAを使用します。マルチパスHAはすべてのシステムに必要です。 • この手順はSASディスク シェルフには適用されません。 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 注: システムのその他のケーブル配線図については、ネットアップ サポート サイト (mysupport.netapp.com)でご使用のシステムのセットアップ ガイドを参照してください。 56 | ハイアベイラビリティ構成ガイド 手順 1. ケーブル接続の手順に進む前に、ケーブル配線図を確認します。 • 図の丸で囲まれた番号は、手順の番号に対応します。 • ディスク シェルフの入力および出力ポートの位置は、ディスク シェルフのモデルによって異 なります。 図に示されているポートの位置ではなく、必ずディスク シェルフのラベルを確認してくださ い。 • コントローラのファイバチャネル ポートの位置は特定のストレージ システム モデルを示した ものではありません。構成に使用するポートの位置は、実際に確認するか、ご使用のモデ ルのセットアップ ガイドに従って判別してください。 • ポート番号は、作成したファイバチャネル ポートのリストにある番号です。 • この図では、各ノードに1つのループ、各ループに1台のディスク シェルフのみを使用してい ます。 実際には、ループ数やディスク シェルフ数がもっと多い場合、またはノード間でディスク シェ ルフ数が異なる場合もあります。 2. ノードBのポートB1をノードAループ1の最初のディスク シェルフのチャネルB入力ポートに接続 します。 HAペアの設置とケーブル接続 | 57 このディスク シェルフの両方のチャネルは各ノードの同じポートに接続されます。これは必須で はありませんが、各ノードのディスクIDが同じになるため、HAペアの管理が楽になります。 こ れは、手順5にも当てはまります。 3. ディスク シェルフのチャネルB出力ポートをループ1の次のディスク シェルフのチャネルB入力 ポートに接続します。 4. ループ1の残りのディスク シェルフについて手順3を繰り返します。 5. ループの最後のディスク シェルフのチャネルB出力ポートをノードAのファイバチャネル ポート A4に接続します。 これにより、チャネルBに対する冗長なマルチパスHA接続が確立されます。 6. ノードBのファイバチャネル ポートB2をノードBループ1の最初のディスク シェルフのチャネルA 入力ポートに接続します。 7. ディスク シェルフのチャネルA出力ポートをループ1の次のディスク シェルフのチャネルA入力 ポートに接続します。 8. ループ1の残りのディスク シェルフについて手順7を繰り返します。 9. ループの最後のディスク シェルフのチャネルA出力ポートをノードAのファイバチャネル ポート A3に接続します。 これにより、チャネルAに対する冗長なマルチパスHA接続が確立されます。 10. HAペアの各ループ ペアについて手順2~9を繰り返します。次のループにはポート3と4を使用 し、その次のループにはポート5と6を使用するという具合に作業を続けます。 タスクの結果 ノードBのケーブル接続が完了しました。 終了後の操作 HAインターコネクトのケーブル接続に進みます。 HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxまたは FAS80xx以外のすべてのシステム) HAペアのノード間のHAインターコネクトをケーブル接続するには、インターコネクト アダプタが正 しいスロットに接続されていることを確認する必要があります。また、各ノードのアダプタを光ケーブ ルで接続する必要があります。 タスク概要 この手順は、ディスク シェルフの種類に関係なく、デュアルシャーシのHAペア(2つのコントローラ モジュールを別々のシャーシに搭載したHAペア)に適用されます(32xxまたはFAS80xxを除く)。 58 | ハイアベイラビリティ構成ガイド 手順 1. Hardware Universe(hwu.netapp.com)を参照し、インターコネクト アダプタがHAペアのシステム の正しいスロットに接続されていることを確認します。 NVRAMアダプタを使用するシステムでは、NVRAMアダプタがHAインターコネクト アダプタと して機能します。 2. 光ケーブルの一端をローカル ノードのHAアダプタ ポートの1つに接続してから、他端を対応す るパートナー ノードの対応するアダプタ ポートに接続します。 HAインターコネクト アダプタをクロス接続しないでください。ローカル ノードのポートは、パート ナー ノードの同じポートにのみケーブル接続します。 クロス接続されたHAインターコネクトが検出されると、システム コンソールおよびイベント ログ (event log showコマンドを使用して確認できます)に次のメッセージが出力されます。 HA interconnect port <port> of this appliance seems to be connected to port <port> on the partner appliance. 3. HAアダプタの残りの2つのポートについても手順2を繰り返します。 タスクの結果 これで、ノードが互いに接続されました。 終了後の操作 システムの構成に進みます。 HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxシステム) 別のシャーシに搭載された32xxコントローラ モジュール間のHAインターコネクトを有効にするに は、一方のコントローラ モジュールのオンボード10GbEポートをパートナーのオンボード10GbEポ ートに接続する必要があります。 タスク概要 この手順は、接続されたディスク シェルフの種類に関係なく、32xxシステムに適用されます。 手順 1. 10GbEケーブルの一端を一方のコントローラ モジュールのc0aポートに接続します。 2. 10GbEケーブルのもう一端をパートナー コントローラ モジュールのc0aポートに接続します。 3. この手順を繰り返して、c0bポートを接続します。 HAインターコネクト アダプタをクロス接続しないでください。ローカル ノードのポートは、パート ナー ノードの同じポートにのみケーブル接続します。 HAペアの設置とケーブル接続 | 59 クロス接続されたHAインターコネクトが検出されると、システム コンソールおよびイベント ログ (event log showコマンドを使用して確認できます)に次のメッセージが出力されます。 HA interconnect port <port> of this appliance seems to be connected to port <port> on the partner appliance. タスクの結果 これで、ノードが互いに接続されました。 終了後の操作 システムの構成に進みます。 HAインターコネクトのケーブル接続(別々のシャーシに搭載されたFAS80xxシステム) 別々のシャーシに搭載されたFAS80xxコントローラ モジュール間のHAインターコネクトを有効にす るには、一方のI/O拡張モジュールのQSFP InfiniBandポートをパートナーのI/O拡張モジュールの QSFP InfiniBandポートに接続する必要があります。 タスク概要 FAS80xxストレージ コントローラ モジュールには外付けのHAインターコネクト ポートは搭載されて いないため、このモデルのコントローラを別々のシャーシに配置するにはI/O拡張モジュールのHA インターコネクト ポートを使用する必要があります。 この手順は、接続されているディスク シェルフの種類に関係なく、FAS80xxシステムに適用されま す。 手順 1. QSFP InfiniBandケーブルの一端を一方のI/O拡張モジュールのib0aポートに接続します。 2. QSFP InfiniBandケーブルのもう一端をパートナーのI/O拡張モジュールのib0aポートに接続し ます。 3. この手順を繰り返して、ib0bポートを接続します。 HAインターコネクト ポートをクロス接続しないでください。ローカル ノードのポートは、パートナ ー ノードの同じポートにのみケーブル接続します。 クロス接続されたHAインターコネクトが検出されると、システム コンソールおよびイベント ログ (event log showコマンドを使用して確認できます)に次のメッセージが出力されます。 HA interconnect port <port> of this appliance seems to be connected to port <port> on the partner appliance. タスクの結果 これで、ノードが互いに接続されました。 60 | ハイアベイラビリティ構成ガイド 終了後の操作 システムの構成に進みます。 ミラーHAペアのケーブル接続 ミラーHAペアのケーブル接続を行うには、各ノードで使用するポートを特定し、それらのポートをケ ーブル接続してから、HAインターコネクトをケーブル接続する必要があります。 タスク概要 ここでは、DS14mk2 ATまたはDS14mk4 FCディスク シェルフを使用する構成についてのケーブル 接続手順を説明します。 SASディスク シェルフを使用するHAペア構成の場合は、ネットアップ サポート サイトのドキュメント を参照してください。 注: アレイLUNを使用するHAペア構成の場合は、Data ONTAPシステムをストレージ アレイにケ ーブル配線する際に特定の手順に従う必要があります。 FlexArray仮想化インストール要件およびリファレンス ガイド Data ONTAPで使用するストレージ アレイの設定については、ネットアップ サポート サイトのドキ ュメントを参照してください。 FlexArray仮想化実装ガイド(サードパーティ製ストレージ) HAインターコネクトのケーブル接続に関するセクションの内容は、ディスク シェルフの種類に関係 なくすべてのシステムに適用されます。 関連情報 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 ファイバチャネル ディスク シェルフの接続に使用するファイバチャネル ポートの特定 HAペアのケーブル接続を行う前に、各ストレージ システムとディスク シェルフの接続に使用する ファイバチャネル ポートとそれらを接続する順番を特定する必要があります。 使用するポートを特定する際には、次の点に留意する必要があります。 • HAペアのディスク シェルフ ループごとに、プライマリ接続用と冗長なマルチパスHA接続用に1 つずつ、2つのポートが必要になります。 各ノードにループが1つある標準HAペアでは、それぞれのノードで4つのポートを使用します。 • 拡張アダプタのポートを使用する前に、オンボードのファイバチャネル ポートを使用してくださ い。 HAペアの設置とケーブル接続 | 61 • HAペアのケーブル接続に使用する各種アダプタの正確な拡張スロット割り当て情報について は、Hardware Universe(hwu.netapp.com)を参照してください。 • ファイバチャネルHBAを使用している場合は、両システムの同じスロットにアダプタを取り付け ます。 ポートを特定したら、両ノードのファイバチャネル ポートの番号リスト(ポート1から)を作成します。 4ポート ファイバチャネルHBAのケーブル接続のガイドライン 4ポート4GbのファイバチャネルHBAのポートを使用する場合は、次の手順に従い、記載されてい る参照マニュアルも併用しながら、接続作業を進めてください。 • まず、ESH4モジュールを使用するディスク シェルフ ループを4ポートHBAに接続する必要があ ります。 • 4ポートHBAのポートを使用する前に、AT-FCXモジュールを使用するディスク シェルフ ループ を2ポートHBAのポートまたはオンボード ポートに接続する必要があります。 • HBAのポートAをループ内の最初のディスク シェルフのチャネルA入力ポートに接続する必要 があります。 パートナー ノードのHBAのポートAをループ内の最初のディスク シェルフのチャネルB入力ポ ートに接続する必要があります。これにより、両ノードのディスク名が同じになります。 • その他のディスク シェルフ ループをHBAのポートを使用して順番に接続する必要があります。 最初のループにポートA、次のループにポートBのように使用していきます。 • 残りのディスク シェルフ ループをすべて接続したあと、該当する場合は、ポートCやポートDを 冗長なマルチパスHA接続に使用する必要があります。 • HBAのドキュメントおよびHardware Universeに記載されたその他のケーブル接続ルールも必 ず確認してください。 ミラーHAペアのポート リストの作成 使用するファイバチャネル ポートを決定したら、どのポートがどのポート プールに属するかを示す 表を作成します。 タスク概要 ミラーHAペアでは、ディスク シェルフの種類に関係なく、SyncMirrorを使用して、相互にミラーリン グする2つのプレックスに各アグリゲートを分けます。一方のプレックスはプール0のディスクを使用 し、もう一方のプレックスはプール1のディスクを使用します。ディスクへのプールの割り当てを適切 に行う必要があります。 ソフトウェアベースのディスク所有権に関するガイドラインに従ってください。 clustered Data ONTAP 8.3 物理ストレージ管理ガイド 62 | ハイアベイラビリティ構成ガイド 手順 1. ポートの使用方法を指定する表を作成します。このマニュアルの配線図では、「P1-3」のような 表記が使用されていますが、これはプール1の3番目のポートを表しています。 2つのミラー ループがある32xxHAペアの場合、ポート リストは次の例のようになります。 プール0 プール1 P0-1:オンボードのポート0a P1-1:オンボードのポート0c P0-2:オンボードのポート0b P1-2:オンボードのポート0d P0-3:スロット2のポートA P1-3:スロット4のポートA P0-4:スロット2のポートB P1-4:スロット4のポートB 終了後の操作 チャネルAループのケーブル接続に進みます。 関連情報 clustered Data ONTAP 8.3 データ保護ガイド チャネルAのDS14mk2 ATまたはDS14mk4 FCディスク シェルフ ループのケーブル 接続 ディスク シェルフのケーブル接続を開始するには、ノードの適切なプール ポートを、そのプール用 のディスク シェルフ スタックのチャネルAモジュールに接続する必要があります。 タスク概要 • この手順ではマルチパスHAを使用します。マルチパスHAはすべてのシステムに必要です。 • この手順はSASディスク シェルフには適用されません。 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 手順 1. ポート リストの作成を完了します。 2. ケーブル接続の手順に進む前に、ケーブル配線図を確認します。 • 図の丸で囲まれた番号は、手順の番号に対応します。 • ディスク シェルフの入力および出力ポートの位置は、ディスク シェルフのモデルによって異 なります。 HAペアの設置とケーブル接続 | 63 図に示されているポートの位置ではなく、必ずディスク シェルフのラベルを確認してくださ い。 • コントローラのファイバチャネル ポートの位置は特定のストレージ システム モデルを示した ものではありません。構成に使用するポートの位置は、実際に確認するか、ご使用のモデ ルのセットアップ ガイドに従って判別してください。 • ポート番号は、作成したファイバチャネル ポートのリストにある番号です。 • この図では、各ノードに1つのループ、各ループに1台のディスク シェルフのみを使用してい ます。 実際には、ループ数やディスク シェルフ数がもっと多い場合、またはノード間でディスク シェ ルフ数が異なる場合もあります。 64 | ハイアベイラビリティ構成ガイド 3. ノードAのチャネルAを接続します。 a. ノードAのプール0用の最初のポート(P0-1)を、ディスク シェルフ プール0の最初のノードA ディスク シェルフのチャネルA入力ポートに接続します。 b. ノードAのプール1用の最初のポート(P1-1)を、ディスク シェルフ プール1の最初のノードA ディスク シェルフのチャネルA入力ポートに接続します。 c. 両方のディスク プールについて、ディスク シェルフのチャネルA出力ポートを、ループ内の 次のディスク シェルフのチャネルA入力ポートに接続します。 HAペアの設置とケーブル接続 | 65 注: 図では、各ディスク プールに含まれるディスク シェルフは1台だけです。プールあたり のディスク シェルフ数は、構成によって異なります。 d. 各ディスク プール内のこのループの残りのディスク シェルフについて手順3cを繰り返し、次 のチャネルA出力を次のディスク シェルフのチャネルA入力ポートに接続します。 e. チャネルA、ノードAにループを追加する場合は、奇数番号のポート(P0-3およびP1-3、P0-5 およびP1-5など)を使用して、手順3aから手順3dを繰り返します。 4. ノードBのチャネルAを接続します。 a. ノードBのプール0用の2番目のポート(P0-2)を、ディスク シェルフ プール0の最初のノードB ディスク シェルフのチャネルA入力ポートに接続します。 b. ノードBのプール1用の2番目のポート(P1-2)を、ディスク シェルフ プール1の最初のノードB ディスク シェルフのチャネルA入力ポートに接続します。 c. 両方のディスク プールについて、ディスク シェルフのチャネルA出力ポートを、ループ内の 次のディスク シェルフのチャネルA入力ポートに接続します。 d. 各ディスク プール内の残りのディスク シェルフについて手順4cを繰り返し、チャネルAの出 力を入力に接続します。 e. チャネルA、ノードBにループを追加する場合は、偶数番号のポート(P0-4およびP1-4、P0-6 およびP1-6など)を使用して、手順4aから手順4dを繰り返します。 終了後の操作 チャネルBループのケーブル接続に進みます。 チャネルBのDS14mk2 ATまたはDS14mk4 FCディスク シェルフ ループのケーブル 接続 ミラーリングされたストレージを提供するには、ノード上のミラーリングされたプール ポートを、適切 なディスク シェルフ スタックのチャネルBモジュールにケーブル接続します。 タスク概要 • この手順ではマルチパスHAを使用します。マルチパスHAはすべてのシステムに必要です。 • この手順はSASディスク シェルフには適用されません。 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 手順 1. ケーブル接続の手順に進む前に、ケーブル配線図を確認します。 • 図の丸で囲まれた番号は、手順の番号に対応します。 66 | ハイアベイラビリティ構成ガイド • ディスク シェルフの入力および出力ポートの位置は、ディスク シェルフのモデルによって異 なります。 図に示されているポートの位置ではなく、必ずディスク シェルフのラベルを確認してくださ い。 • コントローラのファイバチャネル ポートの位置は特定のストレージ システム モデルを示した ものではありません。構成に使用するポートの位置は、実際に確認するか、ご使用のモデ ルのセットアップ ガイドに従って判別してください。 • ポート番号は、作成したファイバチャネル ポートのリストにある番号です。 • この図では、各ノードに1つのループ、各ループに1台のディスク シェルフのみを使用してい ます。 実際には、ループ数やディスク シェルフ数がもっと多い場合、またはノード間でディスク シェ ルフ数が異なる場合もあります。 HAペアの設置とケーブル接続 | 67 2. ノードAのチャネルBを接続します。 a. ノードAのプール0用の2番目のポート(P0-2)を、ディスク シェルフ プール0の最初のノードB ディスク シェルフのチャネルB入力ポートに接続します。 注: このディスク シェルフの両方のチャネルは各ノードの同じポートに接続されます。これ は必須ではありませんが、このように接続すると、各ノードのディスクIDが同じになるの で、HAペアの管理が楽になります。 68 | ハイアベイラビリティ構成ガイド b. ノードAのプール1用の2番目のポート(P1-2)を、ディスク シェルフ プール1の最初のノードB ディスク シェルフのチャネルB入力ポートに接続します。 c. 両方のディスク プールについて、ディスク シェルフのチャネルB出力ポートを、ループ内の 次のディスク シェルフのチャネルB入力ポートに接続します。 注: 図では、各ディスク プールに含まれるディスク シェルフは1台だけです。プールあたり のディスク シェルフ数は、構成によって異なります。 d. 各ディスク プール内の残りのディスク シェルフについて手順2cを繰り返し、チャネルBの出 力を入力に接続します。 e. チャネルB、ノードAにループを追加する場合は、偶数番号のポート(P0-4およびP1-4、P0-6 およびP1-6など)を使用して、手順2aから手順2dを繰り返します。 3. ノードBのチャネルBを接続します。 a. ノードBのプール0用の最初のポート(P0-1)を、ディスク シェルフ プール0の最初のノードA ディスク シェルフのチャネルB入力ポートに接続します。 b. ノードBのプール1用の最初のポート(P1-1)を、ディスク シェルフ プール1の最初のノードA ディスク シェルフのチャネルB入力ポートに接続します。 c. 両方のディスク プールについて、ディスク シェルフのチャネルB出力ポートを、ループ内の 次のディスク シェルフのチャネルB入力ポートに接続します。 d. 各ディスク プール内の残りのディスク シェルフについて手順3cを繰り返し、チャネルBの出 力を入力に接続します。 e. チャネルB、ノードBにループを追加する場合は、奇数番号のポート(P0-3およびP1-3、P0-5 およびP1-5など)を使用して、手順3aから手順3dを繰り返します。 終了後の操作 HAインターコネクトのケーブル接続に進みます。 関連タスク HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxシステム) (58ページ) HAインターコネクトのケーブル接続(別々のシャーシに搭載されたFAS80xxシステム)(59ペー ジ) HAペアの設置とケーブル接続 | 69 各ループの冗長なマルチパスHA接続のケーブル接続 ディスク シェルフのケーブル接続をマルチパスHAにするには、それぞれのループの最後のディス ク シェルフで各チャネルの最後の接続を追加する必要があります。 手順 1. ケーブル接続の手順に進む前に、ケーブル配線図を確認します。 • 図の丸で囲まれた番号は、手順の番号に対応します。 • ディスク シェルフの入力および出力ポートの位置は、ディスク シェルフのモデルによって異 なります。 図に示されているポートの位置ではなく、必ずディスク シェルフのラベルを確認してくださ い。 • コントローラのファイバチャネル ポートの位置は特定のストレージ システム モデルを示した ものではありません。構成に使用するポートの位置は、実際に確認するか、ご使用のモデ ルのセットアップ ガイドに従って判別してください。 • ポート番号は、作成したファイバチャネル ポートのリストにある番号です。 • この図では、各ノードに1つのループ、各ループに1台のディスク シェルフのみを使用してい ます。 実際には、ループ数やディスク シェルフ数がもっと多い場合、またはノード間でディスク シェ ルフ数が異なる場合もあります。 70 | ハイアベイラビリティ構成ガイド 2. ノードAに属する各ループについて、最後のディスク シェルフのチャネルA出力ポートを同じプ ール内の使用可能なノードBのポートに接続します。 3. ノードAに属する各ループについて、最後のディスク シェルフのチャネルB出力ポートを同じプ ール内の使用可能なノードBのポートに接続します。 4. ノードBに属する各ループについて、最後のディスク シェルフのチャネルA出力ポートを同じプ ール内の使用可能なノードBのポートに接続します。 5. ノードBに属する各ループについて、最後のディスク シェルフのチャネルB出力ポートを同じプ ール内の使用可能なノードBのポートに接続します。 HAペアの設置とケーブル接続 | 71 HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxまたは FAS80xx以外のすべてのシステム) HAペアのノード間のHAインターコネクトをケーブル接続するには、インターコネクト アダプタが正 しいスロットに接続されていることを確認する必要があります。また、各ノードのアダプタを光ケーブ ルで接続する必要があります。 タスク概要 この手順は、ディスク シェルフの種類に関係なく、デュアルシャーシのHAペア(2つのコントローラ モジュールを別々のシャーシに搭載したHAペア)に適用されます(32xxまたはFAS80xxを除く)。 手順 1. Hardware Universe(hwu.netapp.com)を参照し、インターコネクト アダプタがHAペアのシステム の正しいスロットに接続されていることを確認します。 NVRAMアダプタを使用するシステムでは、NVRAMアダプタがHAインターコネクト アダプタと して機能します。 2. 光ケーブルの一端をローカル ノードのHAアダプタ ポートの1つに接続してから、他端を対応す るパートナー ノードの対応するアダプタ ポートに接続します。 HAインターコネクト アダプタをクロス接続しないでください。ローカル ノードのポートは、パート ナー ノードの同じポートにのみケーブル接続します。 クロス接続されたHAインターコネクトが検出されると、システム コンソールおよびイベント ログ (event log showコマンドを使用して確認できます)に次のメッセージが出力されます。 HA interconnect port <port> of this appliance seems to be connected to port <port> on the partner appliance. 3. HAアダプタの残りの2つのポートについても手順2を繰り返します。 タスクの結果 これで、ノードが互いに接続されました。 終了後の操作 システムの構成に進みます。 72 | ハイアベイラビリティ構成ガイド HAインターコネクトのケーブル接続(別々のシャーシに搭載された32xxシステム) 別のシャーシに搭載された32xxコントローラ モジュール間のHAインターコネクトを有効にするに は、一方のコントローラ モジュールのオンボード10GbEポートをパートナーのオンボード10GbEポ ートに接続する必要があります。 タスク概要 この手順は、接続されたディスク シェルフの種類に関係なく、32xxシステムに適用されます。 手順 1. 10GbEケーブルの一端を一方のコントローラ モジュールのc0aポートに接続します。 2. 10GbEケーブルのもう一端をパートナー コントローラ モジュールのc0aポートに接続します。 3. この手順を繰り返して、c0bポートを接続します。 HAインターコネクト アダプタをクロス接続しないでください。ローカル ノードのポートは、パート ナー ノードの同じポートにのみケーブル接続します。 クロス接続されたHAインターコネクトが検出されると、システム コンソールおよびイベント ログ (event log showコマンドを使用して確認できます)に次のメッセージが出力されます。 HA interconnect port <port> of this appliance seems to be connected to port <port> on the partner appliance. タスクの結果 これで、ノードが互いに接続されました。 終了後の操作 システムの構成に進みます。 HAインターコネクトのケーブル接続(別々のシャーシに搭載されたFAS80xxシステム) 別々のシャーシに搭載されたFAS80xxコントローラ モジュール間のHAインターコネクトを有効にす るには、一方のI/O拡張モジュールのQSFP InfiniBandポートをパートナーのI/O拡張モジュールの QSFP InfiniBandポートに接続する必要があります。 タスク概要 FAS80xxストレージ コントローラ モジュールには外付けのHAインターコネクト ポートは搭載されて いないため、このモデルのコントローラを別々のシャーシに配置するにはI/O拡張モジュールのHA インターコネクト ポートを使用する必要があります。 この手順は、接続されているディスク シェルフの種類に関係なく、FAS80xxシステムに適用されま す。 HAペアの設置とケーブル接続 | 73 手順 1. QSFP InfiniBandケーブルの一端を一方のI/O拡張モジュールのib0aポートに接続します。 2. QSFP InfiniBandケーブルのもう一端をパートナーのI/O拡張モジュールのib0aポートに接続し ます。 3. この手順を繰り返して、ib0bポートを接続します。 HAインターコネクト ポートをクロス接続しないでください。ローカル ノードのポートは、パートナ ー ノードの同じポートにのみケーブル接続します。 クロス接続されたHAインターコネクトが検出されると、システム コンソールおよびイベント ログ (event log showコマンドを使用して確認できます)に次のメッセージが出力されます。 HA interconnect port <port> of this appliance seems to be connected to port <port> on the partner appliance. タスクの結果 これで、ノードが互いに接続されました。 終了後の操作 システムの構成に進みます。 標準またはミラーのHAペアで無停電電源装置を使用する場合に必 要な接続 HAペアには、無停電電源装置(UPS)を使用できます。UPSを使用すると、一方のノードで停電が 発生した場合は正常にフェイルオーバーが実行され、また両方のノードが停電した場合でも正常 にシャットダウンできます。UPSに正しい機器が接続されていることを確認してください。 UPSの利点を最大限に活用するには、必要な機器すべてをUPSに接続する必要があります。接続 が必要な機器は、構成が標準とミラーのどちらのHAペアかによって異なります。 標準HAペアでは、コントローラ、ディスク、および使用するすべてのファイバチャネル スイッチを接 続する必要があります。 ミラーHAペアの場合、コントローラとFCスイッチについては、標準HAペアと同様にUPSに接続する 必要があります。ただし、2組のディスク シェルフが別個の電源に接続されている場合は、ディスク をUPSに接続する必要はありません。ローカル コントローラとディスクへの電力が中断された場 合、コントローラは、正常にシャットダウンするまで、あるいは電源装置が回復するまで、リモート ディスクにアクセスできます。この場合、同時に両方のディスク セットへの電源が中断されると、 HAペアは正常にシャットダウンできなくなります。 74 | ハイアベイラビリティ構成ガイド HAペアの設定 標準またはミラーのHAペアを初めて起動して設定するときは、HAモード機能やフェイルオーバー の有効化、オプションの設定、ネットワーク接続の設定、設定のテストなどを行う必要があります。 これらのタスクは、ディスク シェルフの種類に関係なく、すべてのHAペアに適用されます。 手順 1. 2. 3. 4. 5. 6. 7. 8. コントローラ モジュールとシャーシのHA状態の確認と設定(74ページ) HAモードの設定とストレージ フェイルオーバーの有効化(76ページ) 2ノード クラスタでのクラスタHAとスイッチレス クラスタの有効化(77ページ) HAペア構成の確認(79ページ) ハードウェア アシスト テイクオーバーの設定(79ページ) 自動テイクオーバーの設定(81ページ) 自動ギブバックの設定(82ページ) テイクオーバーとギブバックのテスト(87ページ) コントローラ モジュールとシャーシのHA状態の確認と設定 システムでHA状態の値を使用する場合は、HAペアのすべてのコンポーネントで同じ値を使用す る必要があります。HAの状態は、保守モードのha-configコマンドを使用して確認できます。必要 に応じて、HAの状態を設定することもできます。 タスク概要 ha-configコマンドは、ローカル コントローラ モジュール、およびローカル シャーシ(デュアルシャ ーシのHAペアの場合)にのみ適用されます。システム全体でHA状態の情報が同じになるように、 必要に応じて、パートナーのコントローラ モジュールおよびシャーシでもコマンドを実行する必要が あります。 注: ノードの初回ブート時のHA状態の値は、コントローラとシャーシのどちらもdefaultです。 HAの状態は、シャーシおよびコントローラ モジュールのハードウェアPROMに記録されます。シス テムのすべてのコンポーネントで、次の表に示す一貫した値になっている必要があります。 システムの構成 スタンドアロン構成(HAペア でない) HAの状態が記録されるコンポ ーネント • シャーシ • コントローラ モジュールA コンポーネントでのHAの状 態の値 non-ha HAペアの設定 | 75 システムの構成 シングルシャーシのHAペア デュアルシャーシのHAペア MetroCluster構成におけるシ ングルシャーシの各HAペア HAの状態が記録されるコンポ ーネント • シャーシ • コントローラ モジュールA • コントローラ モジュールB • シャーシA • コントローラ モジュールA • シャーシB • コントローラ モジュールB • シャーシ • コントローラ モジュールA • コントローラ モジュールB MetroCluster構成におけるデ • ュアルシャーシの各HAペア • シャーシA • シャーシB • コントローラ モジュールB コンポーネントでのHAの状 態の値 ha ha mcc mcc コントローラ モジュールA HAの状態が適切かどうかを確認し、必要に応じて変更するには、次の手順を実行します。 手順 1. 現在のコントローラ モジュールをリブートまたは停止し、次のどちらかの方法で保守モードでブ ートします。 a. コントローラをリブートした場合は、プロンプトが表示されたらCtrl-Cキーを押してブート メニ ューを表示し、[Maintenance mode boot]オプションを選択します。 b. コントローラを停止した場合は、LOADERプロンプトで次のコマンドを入力します。 boot_ontap maint 注: この方法では直接保守モードでブートするため、Ctrl-Cキーを押す必要はありませ ん。 76 | ハイアベイラビリティ構成ガイド 2. 保守モードでシステムをブートしたら、次のコマンドを入力してローカルのコントローラ モジュー ルとシャーシのHAの状態を表示します。 ha-config show HAペア構成のシステムの場合、すべてのコンポーネントのHAの状態がhaになっている必要 があります。 3. 必要に応じて、次のコマンドを入力してコントローラのHAの状態を設定します。 ha-config modify controller ha-state 4. 必要に応じて、次のコマンドを入力してシャーシのHAの状態を設定します。 ha-config modify chassis ha-state 5. 次のコマンドを入力して保守モードを終了します。 halt 6. ブート ローダーのプロンプトで次のコマンドを入力してシステムをブートします。 boot_ontap 7. 必要に応じて、パートナーのコントローラ モジュールでこの手順を繰り返します。 関連情報 clustered Data ONTAP 8.3 MetroClusterインストレーションおよび構成ガイド clustered Data ONTAP 8.3 MetroCluster管理およびディザスタ リカバリ ガイド HAモードの設定とストレージ フェイルオーバーの有効化 HAペアを活用するには、HAモードを設定し、ストレージ フェイルオーバー機能を有効にする必要 があります。 HAモードの設定用コマンド Data ONTAP 8.2以降ではHAのライセンスは不要になりましたが、HAモードを設定するには専用 のData ONTAPコマンドを実行する必要があります。HAモードを選択するには、システムの物理的 な構成でHAを設定しておく必要があります。モードの変更を反映するにはリブートが必要です。 目的 使用するコマンド モードをHAに設 定する storage failover modify -mode ha -node nodename HAペアの設定 | 77 目的 使用するコマンド モードを非HAに 設定する storage failover modify -mode non_ha -node nodename 注: HAモードを無効にする前にストレージ フェイルオーバーを無効にする 必要があります。 関連参照情報 HAペアの接続とコンポーネント (12ページ) storage failover show-typeコマンドで表示されるノードの状態の説明(91ページ) 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover modify - Modify storage failover attributes ストレージ フェイルオーバーの有効化および無効化用コマンド Data ONTAPには、ストレージ フェイルオーバー機能を有効にするためのコマンドが用意されてい ます。 目的 使用するコマンド フェイルオーバ ーを有効にする storage failover modify -enabled true -node nodename フェイルオーバ ーを無効にする storage failover modify -enabled false -node nodename 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover modify - Modify storage failover attributes 2ノード クラスタでのクラスタHAとスイッチレス クラスタの有効化 ノードが2つだけのクラスタには、特別な構成設定が必要です。クラスタ ハイアベイラビリティ(HA) は、ストレージ フェイルオーバーで実現されるHAとは別のもので、2つのノードだけでクラスタを構 成する場合に必要になります。また、スイッチレス構成の場合には、switchless-clusterオプションを 有効にする必要があります。 タスク概要 クラスタHAでは、2ノード クラスタの1つのノードで障害が発生してもクラスタは無効になりません。 2つのノードだけでクラスタを構成する場合の処理を次に示します。 78 | ハイアベイラビリティ構成ガイド • クラスタHAを有効にすると、それに必要なストレージ フェイルオーバーと自動ギブバックが自 動的に有効になります。 • ストレージ フェイルオーバーを有効にすると、クラスタHAが自動的に有効になります。 注: クラスタHAは、クラスタのノードが3つ以上のときは不要であるため、3つ以上で構成する場 合や3つ以上に増えた場合は自動的に無効になります。 2ノード クラスタの場合は、クラスタ インターコネクト スイッチを使用せずに、2つのノードをケーブ ルで直接接続することができます。2ノードのスイッチレス構成を使用する場合は、switchlessclusterネットワーク オプションを有効にして、ノード間のクラスタ通信を確保します。 手順 1. 次のコマンドを入力してクラスタHAを有効にします。 cluster ha modify -configured true ストレージ フェイルオーバーがまだ有効になっていない場合は、ストレージ フェイルオーバーと 自動ギブバックの両方を有効にするように求められます。 2. 2ノード スイッチレス クラスタの場合は、次のコマンドを入力して、switchless-clusterオプションが 設定されていることを確認します。 a. 次のコマンドを入力して、advanced権限レベルに変更します。 set -privilege advanced 確認のプロンプトが表示されたら、advancedモードで処理を続行します。advancedモードのプ ロンプトが表示されます(*>)。 b. 次のコマンドを入力します。 network options switchless-cluster show 出力に値がfalseと表示されたら、次のコマンドを実行する必要があります。 network options switchless-cluster modify true c. 次のコマンドを入力して、admin権限レベルに戻ります。 set -privilege admin 関連コンセプト HAペアとクラスタの関係(13ページ) 1組のHAペアで構成されるクラスタの場合(37ページ) 2ノードのスイッチレス クラスタの場合(16ページ) 関連参照情報 テイクオーバーを伴わないノードの停止またはリブート(104ページ) HAペアの設定 | 79 HAペア構成の確認 一般的な構成エラーの有無を確認するConfig Advisorツールをネットアップ サポート サイトからダ ウンロードすることができます。 タスク概要 Config Advisorは、構成の検証や健常性のチェックに使用できるネットアップ システム向けのツー ルです。 データ収集とシステム分析のために、セキュアなサイトにもセキュアでないサイトにも導入 できます。 注: Config Advisorのサポートには制限があり、オンラインでしか使用できません。 手順 1. ネットアップ サポート サイト(mysupport.netapp.com)からログインし、[Downloads] > [Software] > [ToolChest]の順に選択します。 2. [Config Advisor]をクリックします。 3. Webページの指示に従って、ユーティリティをダウンロードしてインストールし、実行します。 4. Config Advisorを実行したあと、ツールの出力を確認し、問題が検出された場合は表示される 推奨事項に従って対処します。 ハードウェア アシスト テイクオーバーの設定 ハードウェア アシスト テイクオーバーを設定すると、テイクオーバー時間を短縮できます。ハードウ ェア アシスト テイクオーバーでは、リモート管理デバイスを使用して、ローカルの状態の変化がパ ートナー ノードに迅速に通知されます。 ハードウェア アシスト テイクオーバーの設定用コマンド Data ONTAPには、ハードウェア アシスト テイクオーバー機能を設定するためのコマンドが用意さ れています。 目的 使用するコマンド ハードウェア アシスト テイクオーバ ーを有効または無効にする storage failover modify hwassist パートナーのアドレスを設定する storage failover modify hwassist‑partner‑ip パートナーのポートを設定する storage failover modify hwassist‑partner‑port 80 | ハイアベイラビリティ構成ガイド 目的 使用するコマンド ハートビートの間隔を指定する storage failover modify hwassist‑health‑check‑interval ハードウェア アシスト テイクオーバ ーのアラートを送信する回数を指定 する storage failover modify hwassist‑retry‑count 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover modify - Modify storage failover attributes clustered Data ONTAP 8.3 コマンド マップ(7-Mode管理) ハードウェア アシスト テイクオーバーをトリガーするイベント リモート管理デバイス(サービス プロセッサ)は、さまざまなイベントを検出してアラートを生成しま す。受信したアラートの種類によっては、パートナー ノードでテイクオーバーが開始されます。 アラート テイクオーバ ーが開始され るか 説明 power_loss ○ ノードで電源喪失が発生しました。 リモート管理デバイスには、電源喪失時に一時的に 電力を供給する電源装置が備わっているため、パ ートナー ノードに電源喪失を通知することができま す。 l2_watchdog_reset ○ システムのwatchdogハードウェアでL2リセットが検 出されました。 システムのCPUが応答しないことがリモート管理デ バイスで検出され、システムがリセットされました。 power_off_via_sp ○ リモート管理デバイスによってシステムの電源が切 断されました。 power_cycle_via_sp ○ リモート管理デバイスによって、システムの電源がリ セット(切断後に再投入)されました。 reset_via_sp ○ リモート管理デバイスによって、システムがリセットさ れました。 abnormal_reboot × ノードの異常リブートが発生しました。 HAペアの設定 | 81 アラート テイクオーバ ーが開始され るか 説明 loss_of_heartbeat × リモート管理デバイスが、ノードからのハートビート メッセージを受信しなくなりました。 注: このアラートの対象は、HAペアのノード間の ハートビート メッセージではなく、ノードとローカル のリモート管理デバイスの間のハートビート メッセ ージです。 periodic_message × 通常のハードウェア アシスト テイクオーバー中に送 信される定期的なメッセージです。 test × ハードウェア アシスト テイクオーバー処理を確認す るために送信されるテスト メッセージです。 自動テイクオーバーの設定 自動テイクオーバーはデフォルトで有効になります。特定のコマンドを使用して、自動テイクオーバ ーが実行されるタイミングを制御することができます。 自動テイクオーバーの制御用コマンド Data ONTAPには、自動テイクオーバーのデフォルトの動作を変更したり実行されるタイミングを制 御したりするための固有のコマンドが用意されています。 テイクオーバーを自動で実行するパートナ ー ノードの状況 使用するコマンド リブート storage failover modify ‑node nodename ‑onreboot true パニック storage failover modify ‑node nodename ‑onpanic true 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover modify - Modify storage failover attributes clustered Data ONTAP 8.3 コマンド マップ(7-Mode管理) 82 | ハイアベイラビリティ構成ガイド 常に自動テイクオーバーが実行されるシステム イベント ストレージ フェイルオーバーを有効にしている場合、一部のイベントが発生すると常に自動テイク オーバーが実行されます。それらのテイクオーバーは設定で無効にすることはできません。 次のシステム イベントが発生した場合、ノードの自動テイクオーバーが必ず実行され、無効にする ことはできません。 • 停電やwatchdogリセットなどにより、ノードからパートナー ノードにハートビート メッセージを送 信できない場合 • -fパラメータまたは-inhibit-takeoverパラメータを使用しないでノードを停止した場合 • ノードがパニック状態になった場合 自動ギブバックの設定 テイクオーバーされたノードがブートされてギブバック待機状態になったら自動的にギブバックが実 行されるように、自動ギブバックを設定することができます。 自動ギブバックの仕組み 自動テイクオーバー処理と自動ギブバック処理を組み合わせて使用することで、クライアントの停 止を短くしたり回避したりできます。これらの処理は、パニックまたはリブートの発生後やクラスタに 含まれるHAペアが1組だけの場合はデフォルトで実行されます。ただし、それ以外の場合につい ては特定の設定が必要になります。 デフォルトの設定では、HAペアの一方のノードでパニックまたはリブートが発生すると、パートナー ノードにストレージが自動的にテイクオーバーされ、パニックまたはリブートが発生したノードのリブ ートが完了した時点で自動的にギブバックされます。その結果、HAペアは通常の動作状態に戻り ます。 自動ギブバックは、パニックまたはリブート後にはデフォルトで実行されます。パニックまたはリブ ート以外でも自動ギブバックを実行するように設定することもできます。ただし、複数のオプション が自動ギブバックの異なる側面を制御するため、各オプションを個別に設定する必要があります。 自動ギブバックが(パニックまたはリブート以外でも)常に試行されるように設定することもできます が、その場合は次の点に注意してください。 • 自動ギブバックにより、計画外のシステム停止が2回発生します(自動テイクオーバーの実行 後)。 クライアントの設定によっては、この2回目のシステム停止が発生するタイミングを制御するた めに、ギブバックを手動で開始した方がよい場合があります。 • ハードウェアの問題が原因でテイクオーバーが発生し、解決しないと同じ問題が繰り返される 場合、テイクオーバーとギブバックが何度も発生することになります。 HAペアの設定 | 83 注: 自動ギブバックは、クラスタに含まれるHAペアが1組だけの場合はデフォルトで有効になり ます。また、Data ONTAPの無停止アップグレードの実行時はデフォルトで無効になります。 自動ギブバックには、トリガーされた状況に関係なく、パートナー ノードで実行されるまでに一定の 待機時間が設けられています。この時間は、storage failover modifyコマンドの-delaysecondsパラメータで制御されます。 デフォルトの待機時間は600秒です。ギブバックを遅らせるこ とで、このプロセスの実行時に短時間の停止が2回発生します。 1. テイクオーバー処理の実行中に1回 2. ギブバック処理の実行中に1回 これにより、次の処理にかかる1回あたりの停止時間が長くなるのを回避できます。 1. テイクオーバー処理にかかる時間 2. テイクオーバーされたノードがブートされてギブバック可能な状態になるまでの時間 3. ギブバック処理にかかる時間 ルート以外のアグリゲートで自動ギブバックが失敗した場合、自動的にあと2回ギブバックが試行 されます。 自動ギブバックの設定用コマンド Data ONTAPには、自動ギブバックを有効または無効にするためのコマンドが用意されています。 目的 使用するコマンド 自動ギブバックを有効にする(テイクオーバ ーされたノードがブートしてWaiting for Giveback状態になったあと、自動ギブバック の待機時間が経過した時点でギブバックが 実行されるようにする) デフォルト設定は、2ノード クラスタの場合は true、それ以外の場合はfalseです。 storage failover modify ‑node nodename ‑auto‑giveback true 84 | ハイアベイラビリティ構成ガイド 目的 使用するコマンド 自動ギブバックを無効にする デフォルト設定は、2ノード クラスタの場合は true、それ以外の場合はfalseです。 storage failover modify ‑node nodename ‑auto‑giveback false 注: このパラメータをfalseに設定しても、パ ニック時のテイクオーバーおよびリブート 時のテイクオーバーのあとに実行される 自動ギブバックは無効になりません。パニ ック時のテイクオーバーのあとに実行され る自動ギブバックを無効にするに は、‑auto‑giveback‑after‑panicパラメ ータをfalseに設定する必要があります。 パニック時のテイクオーバーのあとに実行さ れる自動ギブバックを無効にする(デフォル トでは有効) storage failover modify ‑node nodename ‑auto‑giveback‑after‑panic false 自動ギブバックが開始されるまでの待機時 間(秒)を設定する(デフォルトは600秒) storage failover modify ‑node nodename ‑delay‑seconds seconds このオプションで指定した待機時間が経過 するまでは、テイクオーバー後に自動ギブ バックは実行されません。 60分間に自動ギブバックが試行される回数 を変更する(デフォルトは2回) storage failover modify ‑node nodename ‑attempts integer -attemptsパラメータで使用される時間 storage failover modify ‑node nodename ‑attempts‑time integer (分)を変更する(デフォルトは60分) storage failover modify ‑node nodename ファイルを開いているCIFSクライアントを終 了するまでの、自動ギブバックを待機する時 ‑auto‑giveback‑cifs‑terminate‑minutes 間(分)を変更する integer 待機している間、システムは該当するワーク ステーションに定期的に警告を送信します。 0(ゼロ)分を指定すると、CIFSクライアントは すぐに終了します。 自動ギブバック処理の実行時に拒否を無視 する 注: 拒否の内容によっては無視できないも のもあります。 storage failover modify ‑node nodename ‑auto‑giveback‑override‑vetoes true HAペアの設定 | 85 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover modify - Modify storage failover attributes clustered Data ONTAP 8.3 コマンド マップ(7-Mode管理) storage failover modifyコマンドの設定による自動ギブバックに対する影響 自動ギブバックの処理は、storage failover modifyコマンドのパラメータの設定によって異な ります。 自動ギブバック パラメータの組み合わせとその影響(パニック時を除く) 次の表に、パニック時以外でテイクオーバーが発生した場合に適用されるstorage failover modifyコマンドのパラメータを示します。 パラメータ デフォルトの設定 -auto-giveback true|false 2ノード クラスタの場合はtrue 4ノード以上のクラスタの場合はfalse -delay-seconds integer(秒数) 600 -onreboot true|false true 次の表に、-onrebootパラメータと-auto-givebackパラメータの各組み合わせについて、パニッ ク時以外のテイクオーバーに対する自動ギブバックの処理を示します。 storage failover modifyのパラメータ テイクオーバーの原因 自動ギブバックの実行 -onreboot true rebootコマンド ○ -auto-giveback true haltコマンド、またはサービス プ ○ ロセッサからの電源再投入 -onreboot true rebootコマンド ○ -auto-giveback false haltコマンド、またはサービス プ × ロセッサからの電源再投入 -onreboot false rebootコマンド × -auto-giveback true haltコマンド、またはサービス プ ○ ロセッサからの電源再投入 -onreboot false rebootコマンド × -auto-giveback false haltコマンド、またはサービス プ × ロセッサからの電源再投入 86 | ハイアベイラビリティ構成ガイド 注: -onrebootパラメータをtrueに設定した場合、リブートが原因でテイクオーバーが発生する と、-auto-givebackパラメータがtrueに設定されているかどうかに関係なく、常に自動ギブバ ックが実行されます。 -onrebootパラメータをfalseに設定した場合は、ノードのリブート時にテイクオーバーが実行さ れません。そのため、-auto-givebackパラメータをtrueに設定しても自動ギブバックは実行さ れません。クライアントのアクセスが中断されます。 パニック時に適用される自動ギブバック パラメータの組み合わせとその影響 次の表に、パニック時に適用されるstorage failover modifyコマンドのパラメータを示しま す。 パラメータ デフォルトの設定 -onpanic true|false true -auto-giveback-after-panic true| false true (権限:Advanced) 次の表に、storage failover modifyコマンドのパラメータの各組み合わせについて、パニック 時の自動ギブバックの処理を示します。 storage failoverのパラメータ パニック発生後の自動ギブバックの実行 -onpanic true ○ -auto-giveback-after-panic true -onpanic true ○ -auto-giveback-after-panic false -onpanic false × -auto-giveback-after-panic true -onpanic false × -auto-giveback-after-panic false 注: -onpanicパラメータをtrueに設定した場合、パニックが発生すると常に自動ギブバックが実 行されます。 -onpanicパラメータをfalseに設定した場合は、テイクオーバーが実行されません。そのた め、‑auto‑giveback‑after‑panicパラメータをtrueに設定しても自動ギブバックは実行されま せん。クライアントのアクセスが中断されます。 HAペアの設定 | 87 テイクオーバーとギブバックのテスト HAペアについてのすべての設定が完了したら、テイクオーバー処理やギブバック処理の際に両 方のノードのストレージに中断なくアクセスできることを確認する必要があります。テイクオーバー の処理中は、通常はパートナー ノードから提供されるデータがローカル(テイクオーバー)ノードで 継続して提供されるようにする必要があります。ギブバックの際は、パートナーのストレージを制御 および提供する役割がパートナー ノードに戻らなければなりません。 手順 1. HAインターコネクト ケーブルの接続を調べて、確実に接続されていることを確認します。 2. ライセンスが付与されたプロトコルごとに、両方のノードでファイルを作成および検出できること を確認します。 3. 次のコマンドを入力します。 storage failover takeover -ofnode partner_node コマンドの詳細については、マニュアル ページを参照してください。 4. 次のいずれかのコマンドを入力して、テイクオーバーが実行されたことを確認します。 storage failover show-takeover storage failover show 例 storage failoverコマンドの-auto-givebackオプションを有効にした場合: cluster::> storage failover show Takeover Node Partner Possible State Description ------ ------- --------- ----------------node1 node2 Waiting for giveback node2 node1 false In takeover, Auto giveback will be initiated in number of seconds seconds 例 storage failoverコマンドの-auto-givebackオプションを無効にした場合: cluster::> storage failover show Takeover Node Partner Possible State Description ------ ------- --------- ----------------node1 node2 Waiting for giveback node2 node1 false In takeover. 88 | ハイアベイラビリティ構成ガイド 5. 次のコマンドを入力して、パートナー ノード(ノード2)に属するディスクのうち、テイクオーバー ノ ード(ノード1)で検出できるすべてのディスクを表示します。 storage disk show -home node2 -ownership 次のコマンドでは、ノード2に属するディスクのうち、ノード1で検出できるすべてのディスクが表 示されます。 cluster::> storage disk show -home node2 -ownership Disk Aggregate Reserver Pool ------ ------------------ ----1.0.2 4078312452 Pool0 1.0.3 4078312452 Pool0 ... Home Owner DR Home Home ID Owner ID DR Home ID ----- ----- ------- ---------- ---------- ---------node2 node2 - 4078312453 4078312453 - node2 node2 - 4078312453 4078312453 - 6. 次のコマンドを入力して、テイクオーバー ノード(ノード1)でパートナー ノード(ノード2)のアグリ ゲートを制御していることを確認します。 aggr show ‑fields home‑id,home‑name,is‑home cluster::> aggr show ‑fields home‑id,home‑name,is‑home aggregate home-id home-name is-home --------- ---------- --------- --------aggr0_1 2014942045 node1 true aggr0_2 4078312453 node2 false aggr1_1 2014942045 node1 true aggr1_2 4078312453 node2 false 4 entries were displayed. テイクオーバーの実行中は、パートナー ノードのアグリゲートのis-homeの値がfalseになりま す。 7. 「Waiting for giveback」メッセージが表示されたら、次のコマンドを入力して、パートナー ノ ードのデータ サービスをギブバックします。 storage failover giveback -ofnode partner_node 8. 次のいずれかのコマンドを入力して、ギブバック処理の進捗を監視します。 storage failover show-giveback storage failover show 9. ギブバックが正常に終了したというメッセージが表示されたかどうかに応じて、次の手順に進み ます。 HAペアの設定 | 89 テイクオーバーおよびギブバ ックの結果 操作 正常終了 パートナー ノードで手順2~8を繰り返します。 失敗 テイクオーバーまたはギブバックのエラーを修正してから、この手順を もう一度実行します。 関連参照情報 storage failover show-typeコマンドで表示されるノードの状態の説明(91ページ) 90 | ハイアベイラビリティ構成ガイド HAペアの監視 さまざまなコマンドを使用してHAペアの状態を監視することができます。テイクオーバーが発生し た場合は、その原因を確認することもできます。 HAペアの監視用コマンド Data ONTAPには、HAペアを監視するためのコマンドが用意されています。 監視対象 使用するコマンド フェイルオーバーの有効 / 無効と発生の有 無、または現在フェイルオーバーを実行でき ない理由 storage failover show ストレージ フェイルオーバーのHAモード設定 が有効になっているノード ストレージ フェイルオーバー(HAペア)構成に 含めるノードについては、この値をhaに設定 する必要があります。 値non-haは、スタンドアロン構成またはシン グル ノード クラスタ構成でのみ使用されま す。 storage failover show -mode ha ハードウェア アシスト テイクオーバーが有効 になっているかどうか storage failover hwassist show これまでに発生したハードウェア アシスト テイ クオーバー イベントの履歴 storage failover hwassist stats show パートナーのアグリゲートをノードに移動する までのテイクオーバー処理の進捗 storage failover show‑takeover アグリゲートをパートナーに戻すまでのギブバ storage failover show‑giveback ック処理の進捗 テイクオーバーまたはギブバックの処理でア グリゲートがホームであるかどうか aggregate show ‑fields home‑id,owner‑id,home‑name,owner‑name, is‑home クラスタHAが有効になっているかどうか(2ノ ード クラスタの場合のみ) cluster ha show HAペアの監視 | 91 監視対象 使用するコマンド HAペアのコンポーネントのHAの状態(HAの 状態を使用するシステム) ha‑config show 注: これは保守モードのコマンドです。 関連タスク 2ノード クラスタでのクラスタHAとスイッチレス クラスタの有効化(77ページ) 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover show - Display storage failover status clustered Data ONTAP 8.3マニュアル ページ:storage failover hwassist show - Display hwassist status clustered Data ONTAP 8.3マニュアル ページ:storage failover hwassist stats show - Display hwassist statistics clustered Data ONTAP 8.3マニュアル ページ:storage failover show-takeover - Display takeover status clustered Data ONTAP 8.3マニュアル ページ:storage failover show-giveback - Display giveback status clustered Data ONTAP 8.3マニュアル ページ:cluster ha show - Show high-availability configuration status for the cluster clustered Data ONTAP 8.3マニュアル ページ:storage aggregate show - Display a list of aggregates storage failover show-typeコマンドで表示されるノードの状態の 説明 storage failover show、storage failover show‑takeover、およびstorage failover show‑givebackの各コマンドを使用して、HAペアの状態を確認し、問題のトラブルシューティング を行うことができます。 次の表に、storage failover showコマンドで表示されるノードの状態を示します。 状態 説明 Connected to partner_name. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。 Connected to partner_name, Partial giveback. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。パートナー ノ ードへの前回のギブバックが部分的なギブバ ック状態になっているか完了していません。 92 | ハイアベイラビリティ構成ガイド 状態 説明 Connected to partner_name, Takeover of partner_name is not possible due to reason(s): reason1, reason2,.... HAインターコネクトがアクティブでパートナー ノードにデータを転送できますが、パートナー ノードのテイクオーバーを実行できません。 テイクオーバーを実行できない理由について は、この表のあとのセクションを参照してくださ い。 Connected to partner_name, Partial giveback, Takeover of partner_name is not possible due to reason(s): reason1, reason2,.... HAインターコネクトがアクティブでパートナー ノードにデータを転送できますが、パートナー ノードのテイクオーバーを実行できません。パ ートナーへの前回のギブバックが部分的なギ ブバック状態になっています。 Connected to partner_name, Waiting for cluster applications to come online on the local node. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。クラスタのアプ リケーションがオンラインになるのを待ってい ます。 この状態は数分続くことがあります。 Waiting for partner_name, Takeover of partner_name is not possible due to reason(s): reason1, reason2,.... ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。reason1、reason2以降に、パートナーの テイクオーバーを実行できない理由が表示さ れます。 Waiting for partner_name, Partial giveback, Takeover of partner_name is not possible due to reason(s): reason1, reason2,.... ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。パートナーへの前回のギブバックが部分 的なギブバック状態になっています。 reason1、reason2以降に、パートナーのテイ クオーバーを実行できない理由が表示されま す。 Pending shutdown. ローカル ノードのシャットダウン中です。テイク オーバーとギブバックの処理は無効になって います。 In takeover. ローカル ノードがテイクオーバー状態であり、 自動ギブバックは無効になっています。 In takeover, Auto giveback will be initiated in number of seconds seconds. ローカル ノードがテイクオーバー状態であり、 number of secondsで示された秒数以内に 自動ギブバックが開始されます。 HAペアの監視 | 93 状態 説明 In takeover, Auto giveback deferred. ローカル ノードがテイクオーバー状態であり、 自動ギブバックが試行されましたが、パートナ ー ノードがギブバック待機状態でないため失 敗しました。 Giveback in progress, module module name. ローカル ノードでパートナー ノードへのギブバ ックの処理を実行中です。module nameで示 されたモジュールのギブバックを実行していま す。 • 詳細を確認するには、storage failover show-givebackコマンドを実行します。 Normal giveback not possible: partner missing file system disks. パートナー ノードに必要なファイルシステム デ ィスクが揃っていません。 Retrieving disk information. Wait a few minutes for the operation to complete, then try giveback. パートナー ノードとテイクオーバー ノードでデ ィスクのインベントリ情報がまだ交換されてい ません。この状態は自動的に解消されます。 Connected to partner_name, Takeover is not possible: Local node missing partner disks テイクオーバーやギブバックの処理 (MetroClusterの場合はスイッチオーバー、復 旧、スイッチバックなどのディザスタ リカバリ処 理も含む)の完了後に、ディスクのインベントリ が一致しないことを示すメッセージが表示され ることがあります。 この場合は、状況が改善されるまで少なくとも 5分待ってから処理を再試行してください。 この状況が解消されない場合は、ディスクやケ ーブル配線に問題がないか調べてください。 Connected to partner, Takeover is not possible: Storage failover mailbox disk state is invalid, Local node has encountered errors while reading the storage failover partner's mailbox disks. Local node missing partner disks テイクオーバーやギブバックの処理 (MetroClusterの場合はスイッチオーバー、復 旧、スイッチバックなどのディザスタ リカバリ処 理も含む)の完了後に、ディスクのインベントリ が一致しないことを示すメッセージが表示され ることがあります。 この場合は、状況が改善されるまで少なくとも 5分待ってから処理を再試行してください。 この状況が解消されない場合は、ディスクやケ ーブル配線に問題がないか調べてください。 94 | ハイアベイラビリティ構成ガイド 状態 説明 Previous giveback failed in module module name. ローカル ノードによるパートナー ノードへのギ ブバックが、module nameで示されたモジュー ルの問題により失敗しました。 • 詳細を確認するには、storage failover show-givebackコマンドを実行します。 Previous giveback failed. Auto giveback disabled due to exceeding retry counts. ローカル ノードによるパートナー ノードへのギ ブバックが失敗しました。再試行回数を超えた ため、自動ギブバックは無効になっています。 Takeover scheduled in seconds seconds. パートナー ノードがシャットダウンされたか、ロ ーカル ノードでオペレータがテイクオーバーを 開始したため、ローカル ノードによるパートナ ー ノードのテイクオーバーがスケジュールされ ています。表示された秒数以内にテイクオー バーが開始されます。 Takeover in progress, module module name. ローカル ノードでパートナー ノードのテイクオ ーバーの処理を実行中です。module nameで 示されたモジュールのテイクオーバーを実行し ています。 Takeover in progress. ローカル ノードでパートナー ノードのテイクオ ーバーの処理を実行中です。 firmware-status. ノードにアクセスできず、パートナーに対するフ ァームウェアの更新から状態を確認しようとし ています。 ファームウェアの状態については、この表のあ との一覧を参照してください。 Node unreachable. ノードにアクセスできず、ファームウェアの状態 を確認できません。 Takeover failed, reason: reason. ローカル ノードによるパートナー ノードのテイ クオーバーが、reasonで示された理由により 失敗しました。 Previous giveback failed in module: module name. Auto giveback disabled due to exceeding retry counts. 前回試行されたギブバックがmodule nameで 示されたモジュールで失敗しました。自動ギブ バックは無効になっています。 • 詳細を確認するには、storage failover show-givebackコマンドを実行します。 HAペアの監視 | 95 状態 説明 Previous giveback failed in module: module name. 前回試行されたギブバックがmodule nameで 示されたモジュールで失敗しました。自動ギブ バックはユーザによって有効にされていませ ん。 • 詳細を確認するには、storage failover show-givebackコマンドを実行します。 Connected to partner_name, Giveback of one or more SFO aggregates failed. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。1つ以上の SFOアグリゲートのギブバックが失敗し、ノード が部分的なギブバック状態になっています。 Waiting for partner_name, Partial giveback, Giveback of one or more SFO aggregates failed. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。1つ以上のSFOアグリゲートのギブバック が失敗し、ノードが部分的なギブバック状態に なっています。 Connected to partner_name, Giveback of SFO aggregates in progress. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。SFOアグリゲ ートのギブバックを実行中です。 • Waiting for partner_name, Giveback of SFO aggregates in progress. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。SFOアグリゲートのギブバックを実行中で す。 • Waiting for partner_name. Node owns aggregates belonging to another node in the cluster. 詳細を確認するには、storage failover show-givebackコマンドを実行します。 詳細を確認するには、storage failover show-givebackコマンドを実行します。 ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。パートナー ノードに属するアグリゲートが ローカル パートナーで所有されています。 96 | ハイアベイラビリティ構成ガイド 状態 説明 Connected to partner_name, Giveback of partner spare disks pending. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。パートナーへ のSFOアグリゲートのギブバックは完了しまし たが、パートナーのスペア ディスクがまだロー カル ノードで所有されています。 • 詳細を確認するには、storage failover show-givebackコマンドを実行します。 Connected to partner_name, Automatic takeover disabled. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。パートナーの 自動テイクオーバーは無効になっています。 Waiting for partner_name, Giveback of partner spare disks pending. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。パートナーへのSFOアグリゲートのギブバ ックは完了しましたが、パートナーのスペア デ ィスクがまだローカル ノードで所有されていま す。 • 詳細を確認するには、storage failover show-givebackコマンドを実行します。 Waiting for partner_name. Waiting for partner lock synchronization. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。パートナー ロックの同期が実行されるのを 待っています。 Waiting for partner_name. Waiting for cluster applications to come online on the local node. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。クラスタのアプリケーションがオンラインに なるのを待っています。 Takeover scheduled. target node relocating its SFO aggregates in preparation of takeover. テイクオーバーの処理が開始されています。テ イクオーバーの準備として、ターゲット ノードで SFOアグリゲートの所有権を切り替えていま す。 Takeover scheduled. target node has relocated its SFO aggregates in preparation of takeover. テイクオーバーの処理が開始されています。テ イクオーバーの準備として、ターゲット ノードで SFOアグリゲートの所有権を切り替えました。 Takeover scheduled. Waiting to disable background disk firmware updates on local node. A firmware update is in progress on the node. テイクオーバーの処理が開始されています。ロ ーカル ノードでのディスク ファームウェアのバ ックグラウンド更新が完了するのを待っていま す。 HAペアの監視 | 97 状態 説明 Relocating SFO aggregates to taking over node in preparation of takeover. テイクオーバーの準備として、ローカル ノード がテイクオーバーするノードにSFOアグリゲー トの所有権を切り替えています。 Relocated SFO aggregates to taking over node. Waiting for taking over node to takeover. ローカル ノードからテイクオーバーするノード へのSFOアグリゲートの所有権の切り替えが 完了しました。テイクオーバーするノードによる テイクオーバーを待っています。 Relocating SFO aggregates to partner_name. Waiting to disable background disk firmware updates on the local node. A firmware update is in progress on the node. ローカル ノードからテイクオーバーするノード へのSFOアグリゲートの所有権の切り替えを 実行中です。ローカル ノードでのディスク ファ ームウェアのバックグラウンド更新が完了する のを待っています。 Relocating SFO aggregates to partner_name. Waiting to disable background disk firmware updates on partner_name. A firmware update is in progress on the node. ローカル ノードからテイクオーバーするノード へのSFOアグリゲートの所有権の切り替えを 実行中です。パートナー ノードでのディスク フ ァームウェアのバックグラウンド更新が完了す るのを待っています。 Connected to partner_name. Previous takeover attempt was aborted because reason. Local node owns some of partner's SFO aggregates. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。前回のテイク オーバーの試行がreasonで示された理由に より中止されました。パートナーの一部のSFO アグリゲートがローカル ノードで所有されてい ます。 Reissue a takeover of the partner with the "‑bypass-optimization" parameter set to true to takeover remaining aggregates, or issue a giveback of the partner to return the relocated aggregates. • 残りのSFOアグリゲートをテイクオーバーす る場合は、‑bypass‑optimizationパラメ ータをtrueに設定して、パートナー ノード のテイクオーバーをもう一度実行します。 再配置されたアグリゲートを戻す場合は、 パートナーのギブバックを実行します。 98 | ハイアベイラビリティ構成ガイド 状態 説明 Connected to partner_name. Previous takeover attempt was aborted. Local node owns some of partner's SFO aggregates. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。前回のテイク オーバーの試行が中止されました。パートナー の一部のSFOアグリゲートがローカル ノードで 所有されています。 Reissue a takeover of the partner with the "‑bypass-optimization" parameter set to true to takeover remaining aggregates, or issue a giveback of the partner to return the relocated aggregates. Waiting for partner_name. Previous takeover attempt was aborted because reason. Local node owns some of partner's SFO aggregates. Reissue a takeover of the partner with the "‑bypass-optimization" parameter set to true to takeover remaining aggregates, or issue a giveback of the partner to return the relocated aggregates. Waiting for partner_name. Previous takeover attempt was aborted. Local node owns some of partner's SFO aggregates. Reissue a takeover of the partner with the "‑bypass-optimization" parameter set to true to takeover remaining aggregates, or issue a giveback of the partner to return the relocated aggregates. • 残りのSFOアグリゲートをテイクオーバーす る場合は、‑bypass‑optimizationパラメ ータをtrueに設定して、パートナー ノード のテイクオーバーをもう一度実行します。 再配置されたアグリゲートを戻す場合は、 パートナーのギブバックを実行します。 ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。前回のテイクオーバーの試行がreasonで 示された理由により中止されました。パートナ ーの一部のSFOアグリゲートがローカル ノード で所有されています。 • 残りのSFOアグリゲートをテイクオーバーす る場合は、‑bypass‑optimizationパラメ ータをtrueに設定して、パートナー ノード のテイクオーバーをもう一度実行します。 再配置されたアグリゲートを戻す場合は、 パートナーのギブバックを実行します。 ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。前回のテイクオーバーの試行が中止され ました。パートナーの一部のSFOアグリゲート がローカル ノードで所有されています。 • 残りのSFOアグリゲートをテイクオーバーす る場合は、‑bypass‑optimizationパラメ ータをtrueに設定して、パートナー ノード のテイクオーバーをもう一度実行します。 再配置されたアグリゲートを戻す場合は、 パートナーのギブバックを実行します。 HAペアの監視 | 99 状態 説明 Connected to partner_name. Previous takeover attempt was aborted because failed to disable background disk firmware update (BDFU) on local node. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。ローカル ノード でのディスク ファームウェアのバックグラウンド 更新が無効になっているため、前回のテイクオ ーバーの試行が中止されました。 Connected to partner_name. Previous takeover attempt was aborted because reason. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。前回のテイク オーバーの試行がreasonで示された理由に より中止されました。 Waiting for partner_name. Previous takeover attempt was aborted because reason. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。前回のテイクオーバーの試行がreasonで 示された理由により中止されました。 Connected to partner_name. Previous takeover attempt by partner_name was aborted because reason. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。パートナー ノ ードによる前回のテイクオーバーの試行が reasonで示された理由により中止されました。 Connected to partner_name. Previous takeover attempt by partner_name was aborted. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。パートナー ノ ードによる前回のテイクオーバーの試行が中 止されました。 Waiting for partner_name. Previous takeover attempt by partner_name was aborted because reason. ローカル ノードとパートナー ノードの間で、HA インターコネクトを介して情報を交換できませ ん。パートナー ノードによる前回のテイクオー バーの試行がreasonで示された理由により中 止されました。 Previous giveback failed in module: module name. Auto giveback will be initiated in number of seconds seconds. 前回のギブバックの試行がmodule_nameで示 されたモジュールで失敗しました。number of secondsで示された秒数以内に自動ギブバッ クが開始されます。 • Node owns partner's aggregates as part of the non-disruptive controller upgrade procedure. 詳細を確認するには、storage failover show-givebackコマンドを実行します。 無停止でのコントローラのアップグレードを実 行中のため、パートナーのアグリゲートがノー ドで所有されています。 100 | ハイアベイラビリティ構成ガイド 状態 説明 Connected to partner_name. Node owns aggregates belonging to another node in the cluster. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。クラスタ内の 別のノードに属するアグリゲートがノードで所 有されています。 Connected to partner_name. Waiting for partner lock synchronization. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。パートナー ロ ックの同期が完了するのを待っています。 Connected to partner_name. Waiting for cluster applications to come online on the local node. HAインターコネクトがアクティブでパートナー ノードにデータを転送できます。ローカル ノード でクラスタのアプリケーションがオンラインにな るのを待っています。 Non-HA mode, reboot to use full NVRAM. ストレージ フェイルオーバーを実行できませ ん。HAモードのオプションがnon_haに設定さ れています。 • Non-HA mode, remove HA interconnect card from HA slot to use full NVRAM. ストレージ フェイルオーバーを実行できませ ん。HAモードのオプションがnon_haに設定さ れています。 • Non-HA mode, remove partner system to use full NVRAM. ノードのNVRAMをすべて使用できるように するには、HAインターコネクト カードをHA スロットから取り外す必要があります。 ストレージ フェイルオーバーを実行できませ ん。HAモードのオプションがnon_haに設定さ れています。 • Non-HA mode. Reboot node to activate HA. ノードのNVRAMをすべて使用できるように するには、ノードをリブートする必要があり ます。 ノードのNVRAMをすべて使用できるように するには、パートナー コントローラをシャー シから取り外す必要があります。 ストレージ フェイルオーバーを実行できませ ん。 • HA機能を有効にするには、ノードをリブー トする必要があります。 HAペアの監視 | 101 状態 説明 Non-HA mode. See documentation for procedure to activate HA. ストレージ フェイルオーバーを実行できませ ん。HAモードのオプションがnon_haに設定さ れています。 • HA機能を有効にするには、HAペアの両方 のノードでstorage failover modify ‑mode ha ‑node nodenameコマンドを実行 してから、それらのノードをリブートする必 要があります。 自動テイクオーバーを実行できない理由 自動テイクオーバーを実行できない場合、storage failover showコマンドの出力に理由が表 示されます。出力の形式は次のようになります。 Takeover of partner_name is not possible due to reason(s): reason1, reason2, ... reasonに出力される内容は次のとおりです。 • 自動テイクオーバーが無効になっています • ディスク シェルフが高温になっている • ディスクのインベントリが交換されていない • フェイルオーバー パートナー ノードをブート中である • フェイルオーバー パートナー ノードでソフトウェアのリバートを実行中である • ローカル ノードが停止される • ローカル ノードでストレージ フェイルオーバー パートナーのメールボックス ディスクを読み取り 中にエラーが発生した • ローカル ノードがすでにテイクオーバー状態である • ローカル ノードでソフトウェアのリバートを実行中である • ローカル ノードでパートナー ディスクが見つからない • メモリが不足している • NVRAMログが同期されていない • ストレージ フェイルオーバーのインターコネクト エラー • ストレージ フェイルオーバーが無効になっている 102 | ハイアベイラビリティ構成ガイド • パートナー ノードでストレージ フェイルオーバーが無効になっている • ストレージ フェイルオーバーが初期化されていない • ストレージ フェイルオーバーのメールボックス ディスクの状態が無効である • ストレージ フェイルオーバーのメールボックス ディスクの状態が初期化されていない • ストレージ フェイルオーバーのメールボックスのバージョンが一致しない • オペレータによってテイクオーバーが無効にされている • HAペアの各ノードのNVRAMのサイズが異なる • HAペアの各ノードで実行されているソフトウェアのバージョンに互換性がない • このノードのテイクオーバーをパートナー ノードで試行中である • テイクオーバーを無効にしたあとにパートナー ノードが停止された • 不明な理由でテイクオーバーを実行できない • パートナー ノードが回復するのを待っている ファームウェアの状態 • ブート失敗 • ブート中 • コア ダンプ中 • スペア コアのダンプ中、テイクオーバー可能 • 停止 • 電源投入時自己診断テストの実行中 • テイクオーバーの実行中 • 初期化中 • 処理完了 • リブート中 • テイクオーバー無効 • 不明 • 稼働 • 待機中 HAペアの監視 | 103 • ローカル ノードでクラスタのアプリケーションがオンラインになるのを待機中 • ギブバックを待機中 • オペレータによる入力を待機中 関連参照情報 HAモードの設定用コマンド(76ページ) 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover show - Display storage failover status clustered Data ONTAP 8.3マニュアル ページ:storage failover show-takeover - Display takeover status clustered Data ONTAP 8.3マニュアル ページ:storage failover show-giveback - Display giveback status 104 | ハイアベイラビリティ構成ガイド テイクオーバーを伴わないノードの停止またはリブート ノードを停止またはリブートするときにストレージ フェイルオーバーによる自動テイクオーバーが実 行されないようにすることができます。これは特定の保守や再設定の処理を行うときに便利です。 テイクオーバーを開始せずにノードを停止またはリブートするコマンド ノードを停止またはリブートするときにストレージ フェイルオーバーによる自動テイクオーバーが実 行されないようにするには、特定のコマンドを実行する必要があります。2ノード クラスタの場合 は、サービスが中断しないようにするために追加の手順も必要になります。 パートナーによるテイクオー バーを回避する状況 使用するコマンド ノードを停止する system node halt ‑node node ‑inhibit-takeover 2ノード クラスタでこのコマンドを実行すると、クラスタのすべて のデータLIFがオフラインになります。そのため、事前にクラスタ HAを無効にし、オンラインとして残すノードにイプシロンを割り 当てておく必要があります。 ノードをリブートする system node reboot ‑node node ‑inhibit-takeover ‑inhibit‑takeoverパラメー 2ノード クラスタでこのコマンドを実行すると、クラスタのすべて のデータLIFがオフラインになります。そのため、事前にクラスタ HAを無効にし、オンラインとして残すノードにイプシロンを割り 当てておく必要があります。 タを指定すると、パートナー ノ ードの‑takeover‑on‑reboot の設定が無視され、テイクオ ーバーが開始されなくなりま す。 ノードをリブートする デフォルトでは、パートナーが リブートされると、もう一方のノ ードに自動的にテイクオーバ ーされます。この動作を変更 するには、storage failoverコマンド の‑onrebootパラメータを変 更します。 storage failover modify ‑node node ‑onreboot false ‑onrebootパラメータをfalseに設定しても、ユーザが設定可 能なリブートの想定時間を超えた場合はテイクオーバーが実行 されます。 関連タスク 2ノード クラスタでのテイクオーバーを伴わないノードの停止またはリブート(105ページ) テイクオーバーを伴わないノードの停止またはリブート | 105 関連情報 clustered Data ONTAP 8.3マニュアル ページ:system node reboot - Reboot a node clustered Data ONTAP 8.3マニュアル ページ:storage failover modify - Modify storage failover attributes 2ノード クラスタでのテイクオーバーを伴わないノードの停止またはリ ブート クラスタHAでは、2ノード クラスタの1つのノードで障害が発生してもクラスタは無効になりません。 2ノード クラスタのノードを‑inhibit‑takeover trueパラメータを使用してテイクオーバーなしで 停止またはリブートする場合、特定の構成設定を変更しないと、両方のノードでデータ処理が停止 します。 タスク概要 クラスタHA構成のノードを‑inhibit‑takeover trueパラメータを使用して停止またはリブートす る場合は、実行前にクラスタHAを無効にし、オンラインのままにするノードにイプシロンを割り当て ておく必要があります。 手順 1. 次のコマンドを入力して、クラスタHAを無効にします。 cluster ha modify -configured false この処理ではストレージ フェイルオーバーは無効になりません。 2. クラスタHAを無効にすると2つのノードのどちらかに自動的にイプシロンが割り当てられるた め、どちらのノードに設定されたかを確認し、必要に応じてオンラインのままにするノードに再割 り当てします。 a. 次のコマンドを入力して、advanced権限レベルに変更します。 set -privilege advanced 確認のプロンプトが表示されたら、advancedモードで処理を続行します。advancedモードのプ ロンプトが表示されます(*>)。 b. 次のコマンドを使用して、イプシロンが設定されているノードを特定します。 cluster show 次の例では、Node1にイプシロンが設定されています。 cluster::*> cluster show Node Health -------------------- ------Node1 true Node2 true Eligibility -----------true true Epsilon -----------true false 106 | ハイアベイラビリティ構成ガイド 停止またはリブートするノードにイプシロンが設定されていない場合は、手順3に進みます。 c. 停止またはリブートするノードにイプシロンが設定されている場合は、次のコマンドを使用し てノードから削除する必要があります。 cluster modify -node Node1 -epsilon false この時点で、どちらのノードにもイプシロンが設定されていない状態になります。 d. 次のコマンドを使用して、オンラインのままにするノード(この例ではNode2)にイプシロンを 割り当てます。 cluster modify -node Node2 -epsilon true 3. 次のいずれかの該当するコマンドを使用して、イプシロンが設定されていないノード(この例で はNode2)をテイクオーバーなしで停止またはリブートします。 system node halt -node Node2 -inhibit-takeover true system node reboot -node Node2 -inhibit-takeover true 4. 停止またはリブートしたノードがオンラインに戻ったら、次のコマンドを使用してクラスタHAを有 効にします。 cluster ha modify -configured true クラスタHAを有効にすると、どちらのクラスタからもイプシロンが自動的に削除されます。 5. 次のコマンドを入力して、admin権限レベルに戻ります。 set -privilege admin 関連タスク テイクオーバーを手動で開始する場合のイプシロンの移動(109ページ) 107 手動テイクオーバーについて パートナーで保守を実施する場合、およびその他の同様の状況では、テイクオーバーを手動で実 行することができます。テイクオーバーの実行に使用するコマンドは、パートナーの状態に応じて 異なります。 手動テイクオーバーの実行および監視用コマンド HAペアのノードで、ディスク、アレイLUN、またはその両方のデータの提供を継続したままノードの 保守を行うには、手動でテイクオーバーを開始します。 次の表に、テイクオーバーの開始に使用できるコマンドを示します。 目的 使用するコマンド パートナー ノードをテイクオーバーする storage failover takeover パートナーのアグリゲートをテイクオーバーを 実行中のノードに移動するまでのテイクオーバ ーの進捗を監視する storage failover show‑takeover クラスタ内のすべてのノードのストレージ フェ イルオーバーのステータスを表示する storage failover show LIFを移行せずにパートナー ノードをテイクオ ーバーする storage failover takeover ‑skip‑lif‑migration‑before‑takeover true ディスクが一致していなくてもパートナー ノード をテイクオーバーする storage failover takeover ‑allow‑disk‑inventory‑mismatch Data ONTAPのバージョンが一致していなくて もパートナー ノードをテイクオーバーする storage failover takeover ‑option allow‑version‑mismatch 注: このオプションは、Data ONTAPの無停 止アップグレード時にのみ使用します。 アグリゲートの再配置を実行せずにパートナ ー ノードをテイクオーバーする storage failover takeover ‑bypass‑optimization true パートナーによるストレージ リソースの正常終 了を待たずにパートナー ノードをテイクオーバ ーする storage failover takeover ‑option immediate 注: immediateオプションを指定してstorage failoverコマンドを実行する前に、次のコマンドを使 用して、別のノードにデータLIFを移行する必要があります。 108 | ハイアベイラビリティ構成ガイド network interface migrate-all -node node • 先にデータLIFを移行せずにstorage failover takeover ‑option immediateコマンド を指定すると、skip‑lif‑migration‑before‑takeoverオプションを指定していなくても、ノ ードからのデータLIFの移行が大幅に遅れます。 • 同様に、immediateオプションを指定した場合は、bypass‑optimizationオプションを falseに設定しても、ネゴシエート テイクオーバーの最適化が省略されます。 注意: オールフラッシュで最適化されたFAS80xxシリーズ システムの場合、HAペアの両方のノ ードがオールフラッシュで最適化されている必要があります。オールフラッシュによる最適化の 状態が一致していないHAペアでは、HDDを使用したアグリゲートのストレージ フェイルオーバ ーのテイクオーバーによってHDDアグリゲートがオフラインになります。また、強制的なストレー ジ フェイルオーバーのテイクオーバー処理を実行しても、HDDアグリゲートがオンラインになら ない可能性があります。 オールフラッシュで最適化された構成でサポートされるのはSSDだけであるため、HAペアの一 方のノードにHDDまたはアレイLUNが含まれている(したがって、オールフラッシュで最適化さ れていない)場合は、オールフラッシュで最適化されているノードによってそのノードのストレージ フェイルオーバーのテイクオーバーを試行しようとすると、次の条件が適用されます。 • 正常なストレージ フェイルオーバーのテイクオーバーが失敗します。 オールフラッシュによる最適化の状態が一致しないかぎり、ストレージ フェイルオーバーのテ イクオーバーを試行しないでください。 • -allow-disk-inventory-mismatch trueパラメータを使用したストレージ フェイルオーバ ーのテイクオーバーは成功する可能性がありますが、HDDを使用したアグリゲートをオンラ インにすることはできません。 このパラメータを指定した場合は、‑bypass‑optimizationパラメータをfalseに設定して も、ネゴシエート テイクオーバーの最適化が省略されます。このパラメータを使用すると、ク ライアントが停止する可能性があります。 • immediateオプションを使用したストレージ フェイルオーバーのテイクオーバーは成功しま す。 • forceオプションを使用したストレージ フェイルオーバーのテイクオーバーは成功します。 このオプションを指定した場合は、‑bypass‑optimizationオプションをfalseに設定して も、ネゴシエート テイクオーバーの最適化が省略されます。 注意: このオプションを使用すると、データが失われる可能性があります。HAインターコネ クトが接続解除されている場合やアクティブでない場合、またはフェイルオーバー パート ナーのNVRAMカードの内容が非同期の場合、通常、テイクオーバーは無効になっていま す。forceオプションを使用すると、(ストレージ フェイルオーバーのテイクオーバーで失わ れる可能性のあるクライアント データを含む)NVRAMが非同期の状態でも、ノードはパー トナーのストレージをテイクオーバーできます。 手動テイクオーバーについて | 109 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover takeover - Take over the storage of a node's partner clustered Data ONTAP 8.3マニュアル ページ:storage failover show-takeover - Display takeover status clustered Data ONTAP 8.3マニュアル ページ:storage failover show - Display storage failover status clustered Data ONTAP 8.3マニュアル ページ:network interface migrate-all - Migrate all data and cluster management logical interfaces away from the specified node clustered Data ONTAP 8.3 物理ストレージ管理ガイド テイクオーバーを手動で開始する場合のイプシロンの移動 手動で開始したテイクオーバーによって、ストレージ システムの1つのノードで予期しないノード障 害が発生するとクラスタ全体のクォーラムが失われる可能性がある場合は、イプシロンを移動する 必要があります。 タスク概要 計画的なメンテナンスを実施するときは、HAペアの一方のノードをテイクオーバーする必要があり ます。 残りのノードでクライアント データの計画外の中断を防ぐには、クラスタ全体のクォーラムを 維持することが必要です。 場合によっては、テイクオーバーの実行時にクラスタで予期しないノー ド障害が発生し、クラスタ全体のクォーラムが失われることがあります。 この状況は、テイクオーバーするノードにイプシロンが設定されている場合や、イプシロンが設定さ れたノードが正常な状態でない場合に発生します。 クラスタの耐障害性を高めるには、テイクオー バーするノード以外の正常なノードにイプシロンを移動します。 通常はHAパートナーに移動しま す。 クォーラムの投票に参加するのは、対象となる正常なノードだけです。クラスタ全体のクォーラムを 維持するには、対象となる、オンラインかつ正常なノードの半数を超える投票が必要です。 オンラ インのノード数が偶数のクラスタの場合は、クォーラムを維持するために、イプシロンと呼ばれる投 票加重がいずれかのノードに追加で割り当てられます。 注: クラスタ形成の投票対象とするかどうかはcluster modify ‑eligibility falseコマン ドを使用して変更できますが、ノード構成のリストアや長時間にわたるメンテナンスを実施する場 合以外は変更しないことを推奨します。 ノードを対象外として設定した場合、対象に戻してリブ ートするまで、ノードはSANデータの提供を中断します。また、ノードが対象外のときは、NASデ ータのアクセスにも影響することがあります。 クラスタ管理およびクォーラムとイプシロンの詳細については、ネットアップ サポート サイト (mysupport.netapp.com/documentation/productsatoz/index.html)のドキュメント ライブラリを参照し てください。 clustered Data ONTAP 8.3 システム アドミニストレーション ガイド(クラスタ管理) 110 | ハイアベイラビリティ構成ガイド 手順 1. クラスタの状態を確認し、テイクオーバーするノード以外の正常なノードにイプシロンが設定さ れていることを確認します。 a. 次のコマンドを入力して、advanced権限レベルに変更します。 set -privilege advanced advancedモードのプロンプト(*>)が表示されたら、確認して続行します。 b. 次のコマンドを使用して、イプシロンが設定されているノードを特定します。 cluster show 次の例では、Node1にイプシロンが設定されています。 cluster::*> cluster show Node Health -------------------- ------Node1 true Node2 true Eligibility -----------true true Epsilon -----------true false テイクオーバーするノードにイプシロンが設定されていない場合は、手順4に進みます。 2. 次のコマンドを入力して、テイクオーバーするノードからイプシロンを削除します。 cluster modify -node Node1 -epsilon false 3. 次のコマンドを使用して、パートナー ノード(この例ではNode2)にイプシロンを割り当てます。 cluster modify -node Node2 -epsilon true 4. 次のコマンドを使用して、テイクオーバー処理を実行します。 storage failover takeover -ofnode node 5. 次のコマンドを入力して、admin権限レベルに戻ります。 set -privilege admin 関連タスク 2ノード クラスタでのテイクオーバーを伴わないノードの停止またはリブート(105ページ) 関連参照情報 テイクオーバーを伴わないノードの停止またはリブート(104ページ) 111 手動ギブバックについて パートナー ノードのプロセスを終了する標準ギブバック、または強制ギブバックを実行できます。 注: ギブバックを実行する前に、『clustered Data ONTAP物理ストレージ管理ガイド』の説明に従 って、障害のあるドライブをテイクオーバーされたシステムから取り外す必要があります。 ギブバックが中断された場合 ギブバック プロセス処理中にテイクオーバー ノードで障害が発生したり停電が起きたりすると、そ のプロセスは停止します。障害が修復されるか電力が回復するまで、テイクオーバー ノードはテイ クオーバー モードになります。 ただし、障害がギブバックのどの段階で発生したかによって、これとは異なる動作になることがあり ます。障害や停電が部分的なギブバック状態の間(ルート アグリゲートのギブバックの完了後)に 発生した場合は、ノードはテイクオーバー モードにはならず、部分的なギブバック モードになりま す。この場合、プロセスを完了するには、ギブバック処理をもう一度実行します。 ギブバックが拒否された場合 ギブバックが拒否された場合、EMSメッセージを調べて原因を特定する必要があります。その理由 に応じて、拒否を無視しても問題がないかどうかを判断することができます。 storage failover show-givebackコマンドを実行すると、ギブバックの進捗が表示されます。 ギブバックが拒否された場合は、拒否したサブシステムも表示されます。拒否の中には、無視して もかまわないソフトなものと、強制しても無視できないハードなものがあります。次の表に、無視で きないソフトな拒否について、推奨される対処方法を示します。 次のコマンドを使用して、ギブバックの拒否に関するEMSの詳細を確認できます。 event log show -node * -event gb* ルート アグリゲートのギブバック 次の拒否は、アグリゲートの再配置処理には適用されません。 拒否しているサブシステ ム モジュール 対処方法 vfiler_low_level 拒否の原因となっているCIFSセッションを終了するか、セッションが 開いているCIFSアプリケーションをシャットダウンします。 この拒否を無視すると、CIFSを使用しているアプリケーションが突然 切断され、データが失われる可能性があります。 112 | ハイアベイラビリティ構成ガイド 拒否しているサブシステ ム モジュール 対処方法 Disk Check ギブバックを実行する前に、障害が発生したかバイパスされたディス クをすべて取り外します。 ディスクの完全消去を実行中の場合は、処理が完了するまで待ちま す。 この拒否を無視すると、容量確保の競合やディスクにアクセスできな いことが原因でアグリゲートやボリュームがオフラインになり、機能 が停止する可能性があります。 SFOアグリゲートのギブバック 拒否しているサブシステ ム モジュール 対処方法 Lock Manager ファイルを開いているCIFSアプリケーションを適切な手順でシャット ダウンするか、それらのボリュームを別のアグリゲートに移動しま す。 この拒否を無視すると、CIFSのロック状態が解除され、システムの 停止やデータの損失の原因になります。 Lock Manager NDO ロックがミラーされるまで待ちます。 この拒否を無視すると、Microsoft Hyper-V仮想マシンの処理が停止 します。 RAID EMSメッセージを調べて拒否の原因を特定します。 Disk Inventory • nvfileが原因である場合は、オフラインのボリュームおよびアグリ ゲートをオンラインにします。 • ディスクの追加処理またはディスク所有権の再割り当て処理を実 行中の場合は、それらの処理が完了するまで待ちます。 • アグリゲートの名前またはUUIDの競合が原因である場合は、ト ラブルシューティングを行ってその問題を解決します。 • ミラーの再同期、ミラーの検証、またはディスクのオフライン化が 原因で拒否された場合は無視してかまいません。これらの処理 は、ギブバック後に再開されます。 トラブルシューティングを行って、問題の原因を特定して解決します。 移行中のアグリゲートに属するディスクは、デスティネーション ノード で認識できないことがあります。 アグリゲートまたはボリュームにアクセスできない場合、ディスクにア クセスできないことが原因である可能性があります。 手動ギブバックについて | 113 拒否しているサブシステ ム モジュール 対処方法 SnapMirror トラブルシューティングを行って、問題の原因を特定して解決します。 この拒否は、SnapMirrorに適切なメッセージを送信できず、 SnapMirrorをシャットダウンできない場合に発生します。 関連参照情報 storage failover show-typeコマンドで表示されるノードの状態の説明(91ページ) 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover show-giveback - Display giveback status 手動ギブバックの実行用コマンド HAペアのノードで、保守が完了したあとやテイクオーバーの原因となった問題を解決したあとに元 の所有者にストレージを戻すには、手動でギブバックを開始します。 目的 使用するコマンド パートナー ノードにストレージをギブバックする storage failover giveback ‑ofnode nodename パートナーがギブバック待機モードでなくてもス トレージをギブバックする storage failover giveback ‑ofnode nodename ‑require‑partner‑waiting false このオプションは、長時間クライアントが停止 しても問題がない場合にのみ使用してくださ い。 ギブバック処理がプロセスで拒否されてもスト レージをギブバックする(強制的にギブバックを 実行する) storage failover giveback ‑ofnode nodename ‑override‑vetoes true CFOアグリゲート(ルート アグリゲート)だけを ギブバックする storage failover giveback ‑ofnode nodename ‑only‑cfo‑aggregates true ギブバック コマンドの実行後にギブバックの進 捗を監視する storage failover show‑giveback このオプションを使用すると、長時間クライア ントが停止したり、ギブバックの完了後にアグ リゲートやボリュームがオンラインにならなくな ったりする可能性があります。 114 | ハイアベイラビリティ構成ガイド 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage failover giveback - Return failed-over storage to its home node clustered Data ONTAP 8.3マニュアル ページ:storage failover show-giveback - Display giveback status clustered Data ONTAP 8.3マニュアル ページ:storage failover takeover - Take over the storage of a node's partner clustered Data ONTAP 8.3マニュアル ページ:storage failover show-takeover - Display takeover status clustered Data ONTAP 8.3 コマンド マップ(7-Mode管理) 115 HAペアのDS14mk2 ATまたはDS14mk4 FCディスク シ ェルフの管理 HAペアにディスク シェルフを追加する場合や、HAペアのディスク シェルフ ハードウェアをアップ グレードまたは交換する場合は、特定の手順に従う必要があります。 ここでは、HAペアのDS14mk2 ATまたはDS14mk4 FCディスク シェルフについて説明します。SAS ディスク シェルフを使用するHAペア構成の場合は、ネットアップ サポート サイトのドキュメントを参 照してください。 関連情報 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 マルチパスHAループへのDS14mk2 ATまたはDS14mk4 FCディス ク シェルフの追加 マルチパスHAが構成されたHAペアにサポート対象のDS14mk2 ATまたはDS14mk4 FCディスク シェルフを追加するには、新しいディスク シェルフをループの最後に追加し、前のディスク シェルフ とコントローラに接続する必要があります。 タスク概要 この手順はSASディスク シェルフには適用されません。 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 手順 1. 次のコマンドを入力して、すべてのディスクに2つのパスがあることを確認します。 storage disk show -port 注: パスが2つ表示されていないディスクがある場合、この手順を進めるとデータ サービスが 停止する可能性があります。手順を進める前に、問題を解決してすべてのパスを冗長構成 にしてください。冗長パスのないディスクがある場合は、無停止アップグレード方式(フェイル オーバー)を使用してストレージを追加できます。 2. DiskShelf14mk2およびDiskShelf14mk4 FC、またはDiskShelf14mk2 ATのハードウェア サービ ス ガイドの説明に従って、新しいディスク シェルフをキャビネットまたは装置ラックに設置しま す。 116 | ハイアベイラビリティ構成ガイド 3. 新しいディスク シェルフを追加するループで最後のディスク シェルフを特定します。ループの最 後のディスク シェルフのチャネルA出力ポートは、いずれかのコントローラに接続されていま す。 注: 手順4では、ディスク シェルフからケーブルを外します。ケーブルを外すと、アダプタがリ セットされてループが停止するという内容のメッセージが表示されます。この手順の途中でこ のようなメッセージが表示されても問題はありません。ただし、ディスク シェルフからケーブル を外す前にアダプタを無効にしておけば、このようなメッセージは表示されなくなります。 最後のディスク シェルフのチャネルA出力ポートに接続されているアダプタを無効にする場 合は、次のコマンドを入力します。 run node nodename fcadmin config -d adapter adapterはアダプタの名前 (0aなど)です。 4. SFPと、最後のディスク シェルフのチャネルA出力ポートに接続されているケーブルを外しま す。 注: そのケーブルの反対側(コントローラに接続されている側)はそのままにしておきます。 5. シェルフ同士の接続に適したケーブルを使用して、最後のディスク シェルフのチャネルA出力 ポートと新しいディスク シェルフのチャネルA入力ポートを接続します。 6. 手順4で外したSFPとケーブルを、新しいディスク シェルフのチャネルA出力ポートに接続しま す。 7. 手順3でアダプタを無効にした場合は、次のコマンドを入力して、アダプタを再度有効にします。 run node nodename fcadmin config -e adapter 8. チャネルBについて、手順4~7を繰り返します。 注: チャネルB出力ポートはもう一方のコントローラに接続されています。 9. 次のコマンドを入力して、すべてのディスクに2つのパスがあることを確認します。 storage disk show -port すべてのディスクについてパスが2つ表示されます。 関連情報 SAS Disk Shelves Universal SAS and ACP Cabling Guide SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 HAペアのDS14mk2 ATまたはDS14mk4 FCディスク シェルフの管理 | 117 HAペアのモジュールのアップグレードまたは交換 冗長パスを使用するHAペアでは、ストレージへのアクセスを中断させずにディスク シェルフ モジュ ールのアップグレードまたは交換が可能です。 タスク概要 ここでは、DS14mk2 ATまたはDS14mk4 FCディスク シェルフの手順を説明します。 SASディスク シェルフを使用する構成の場合は、ネットアップ サポート サイト (mysupport.netapp.com/documentation/productsatoz/index.html)のドキュメントを参照してください。 • SAS Disk Shelves Universal SAS and ACP Cabling Guide • SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 ディスク シェルフ モジュールについて DS14mk2 ATまたはDS14mk4 FCシェルフのディスク シェルフ モジュール(ESH4またはAT-FCX) には、ディスク交換時のループの整合性を維持し、信号のタイミングを再調整して、ループの安定 性を向上させるSCSI-3エンクロージャ サービス プロセッサが搭載されています。 モジュールのア ップグレード時または交換時には、モジュールが正しく接続されていることを確認する必要があり ます。 DS14mk2 ATまたはDS14mk4 FCディスク シェルフは、ESH4またはAT-FCXモジュールをサポート しています。 ディスク シェルフの背面中央には、モジュールが2つ(チャネルAおよびチャネルBに1つずつ)搭載 されています。 注: DS14mk2 AT / DS14mk4 FCシェルフのモジュールBの入力ポートと出力ポートは、モジュー ルAの反対です。 モジュールの種類の変更に関する制限事項 HAペア内のモジュールの種類を変更する場合は、制限事項を確認してください。 AT-FCXモジュールと同じループでESH4モジュールを混在させることはできません。 118 | ハイアベイラビリティ構成ガイド 推奨するモジュールの種類の変更方法 HAペア内のモジュールの種類を変更する場合は、変更方法のガイドラインを確認してください。 • HAペアからモジュールを取り外す場合は、そのパスが冗長構成になっているかどうか確認し なければなりません。 冗長構成になっていれば、そのモジュールを取り外しても、ストレージ システムのデータ サー ビス機能に影響は生じません。しかし、そのモジュールがHAペア内のいずれかのディスクへの 唯一のパスとなっている場合は、システムが停止しないような手段を講じる必要があります。 • モジュールを交換する際には、交換用のモジュールのターミネイト スイッチが交換前のモジュ ールと同じ位置にあることを確認してください。 注: ESH4モジュールにはセルフターミネイト機能があるので、この注意事項はこれらのモジュ ールには適用されません。 • 異なる種類のモジュールに交換する場合は、ケーブルの変更が必要かどうかも確認してくださ い。 サポート対象のケーブル種別の詳細については、ご使用のディスク シェルフのハードウェア マ ニュアルを参照してください。 • モジュールの取り付け後すぐにケーブルをループに接続せずに、必ず30秒間待ってから接続し てください。 モジュールのテスト ディスク シェルフ モジュールの交換またはアップグレード後にテストを行い、正しく構成され、機能 することを確認する必要があります。 手順 1. 次のコマンドを入力して、すべてのディスク シェルフが正常に動作していることを確認します。 run -node nodename environ shelf 2. 次のコマンドを入力して、足りないディスクがないことを確認します。 run -node nodename aggr status -r ローカル ノードに表示されるローカル ディスクは、パートナー ノードではパートナー ディスクと して表示されます(逆も同様)。 3. ライセンスが付与されたプロトコルごとに、両方のノードでファイルを作成および検出できること を確認します。 HAペアのDS14mk2 ATまたはDS14mk4 FCディスク シェルフの管理 | 119 HAペアのパス ステータスの判別 HAペアからモジュールを取り外す場合、変更するパスが冗長構成になっているかどうかを確認す る必要があります。ディスクのパスが冗長構成になっているかどうかは、storage disk show portコマンドを使用して確認できます。 タスク概要 ディスクのパスが冗長構成になっていれば、モジュールを取り外しても、ストレージ システムのデ ータ サービス機能に影響は生じません。しかし、そのモジュールがHAペア内のいずれかのディス クへの唯一のパスとなっている場合は、システムが停止しないような手段を講じる必要がありま す。 手順 1. システム コンソールでstorage disk show -portコマンドを入力します。 このコマンドを実行すると、HAペアの各ディスクについて次の情報が表示されます。 • プライマリ ポート • セカンダリ ポート • ディスク タイプ • ディスク シェルフ • ベイ 冗長パスを使用する構成と使用しない構成の例 次に、Data ONTAPシステムで構成されるHAペアで冗長パスを使用した場合のstorage disk show -portコマンドの出力の例を示します。 cluster::> storage disk show -port Primary Port Secondary Bay --------------- ---- --------------1.0.0 A node1:0b.00.0 1.0.1 A node1:0b.00.1 1.0.2 A node1:0b.00.2 1.0.3 B node2:0b.00.3 1.0.4 B node2:0b.00.4 ... Port Type ---B B B A A Shelf ------ ----- --SAS 0 0 SAS 0 1 SAS 0 2 SAS 0 3 SAS 0 4 すべてのディスクでアクティブなパスが2つある点(AのパスとBのパス)に留意してください。 冗長パスがある場合、システムからモジュールを取り外す前にノードをフェイルオーバーす る必要はありません。 120 | ハイアベイラビリティ構成ガイド 注意: すべてのディスクにパスが2つあることを確認してください。冗長パスのHAペアであ っても、ハードウェアまたは設定の問題でパスが1つだけになっているディスクが存在する 場合もあります。HAペアにパスが1つしかないディスクがある場合、モジュール交換時に は、そのループをシングルパスのHAペアとして扱う必要があります。 次に、Data ONTAPシステムで構成されるHAペアで冗長パスを使用しない場合のstorage disk show -portコマンドの出力の例を示します。 cluster::> storage disk show -port Primary Port Secondary Bay --------------- ---- --------------1.0.0 A 1.0.1 A 1.0.2 A 1.0.3 B 1.0.4 B ... Port Type ---- Shelf ------ ----- --SAS 0 0 SAS 0 1 SAS 0 2 SAS 0 3 SAS 0 4 このHAペアには、各ディスクへのパスが1つしかありません。このような場合は、モジュール を取り外すとそのパスが無効になるので、まずテイクオーバーを実行しなければなりませ ん。 モジュールのホットスワップ 障害の発生したディスク シェルフ モジュールのホットスワップが可能です。ホットスワップでは、デ ータの使用を停止せずに、障害のあるモジュールの取り外しと交換を行うことができます。 タスク概要 ディスク シェルフ モジュールをホットスワップする場合は、ディスクへの唯一のパスを無効にしない ように注意する必要があります。無効にするとシステムが停止します。 注意: 交換用モジュールより新しいファームウェアが/mroot/etc/shelf_fwディレクトリにある 場合、ファームウェアの更新が自動的に実行されます。このファームウェア更新により、マルチ パスでないHA AT‑FCX、Data ONTAP 7.3.1より前のバージョンを実行しているマルチパスHA構 成、およびRoHS非準拠のAT‑FCXモジュールを使用したシステムでは、サービスの中断が発生 します。 手順 1. ストレージ システムが、ホットスワップ対象のディスク シェルフ モジュールをサポートするため の最小限のソフトウェア要件を満たしていることを確認します。 詳細については、DiskShelf14mk2およびDiskShelf14mk4 FC、またはDiskShelf14mk2 ATのハ ードウェア サービス ガイドを参照してください。 HAペアのDS14mk2 ATまたはDS14mk4 FCディスク シェルフの管理 | 121 2. 取り外すモジュールが含まれているループを確認し、そのループがいずれかのディスクのシン グルパスになっていないかどうか調べます。 3. このループをコントローラへの唯一のパスとして使用しているディスクがある場合は、次の手順 を実行します。 a. 交換するモジュールからノードの一方(ノードA)へのケーブルを確認します。 b. ノードBのコンソールで次のコマンドを入力します。 storage failover takeover -ofnode NodeA c. テイクオーバーが完了するまで待ち、パートナー ノード(ノードA)がリブートしてギブバック 待機状態になっていることを確認します。 ノードAに接続されているループ内のモジュールを交換できます。 4. 静電気防止用リスト ストラップおよびアース コードを装着します。 5. 取り外すモジュールからファイバチャネルのケーブルを取り外します。 6. 両手の親指と人差し指でモジュールのカム レバーを押して解放し、ディスク シェルフから引き 抜きます。 7. ディスク シェルフ背面のスロットに交換用モジュールをスライドさせてから、カム レバーを所定 の位置に押し込みます。 注意: モジュールをディスク シェルフに挿入する際に力を入れすぎないように注意してくださ い。コネクタが破損することがあります。 モジュールを取り付けたら、30秒間待ち、そのあと次の手順に進みます。 8. ディスク シェルフにケーブルを元どおり接続します。 9. 稼働中のノードのコンソールで次のコマンドを入力して、新しいモジュールの動作を確認しま す。 run -node nodename そのノードから、変更されたディスク シェルフのステータスが報告されます。 10. 前の手順でテイクオーバーを実行した場合は、次の手順を実行します。 a. テイクオーバー ノードのコンソールで次のコマンドを入力して、ノードAのディスク シェルフ の制御を戻します。 storage failover giveback -ofnode NodeA b. ギブバックが完了するまで待ち、そのあと次の手順に進みます。 11. 交換したモジュールをテストします。 12. 構成をテストします。 122 | ハイアベイラビリティ構成ガイド 関連コンセプト 推奨するモジュールの種類の変更方法(118ページ) 関連タスク HAペアのパス ステータスの判別(119ページ) Data ONTAP 8.2.1以降を実行するシステムでのディスク シェルフまたはループのホットリムーブ (123ページ) 123 HAペアでの無停止操作 HAペアのテイクオーバー処理とギブバック処理を利用すると、ストレージへのアクセスを中断せず に、ハードウェア コンポーネントの交換や構成内のソフトウェアのアップグレードを実行できます。 システムで無停止操作を実行するには、パートナーでシステムのストレージをテイクオーバーし、 保守を行ってから、ストレージをギブバックします。さらに、アグリゲートの再配置を使用すると、ス トレージ コントローラのアップグレードや交換の処理も無停止で実行できます。 HAペアでの無停止操作に関する手順の参照先 HAペアでは、システムのメンテナンスやアップグレードの操作を無停止で実行できます。 必要な 手順については、それぞれのドキュメントを参照してください。 次の表に、無停止操作に関する情報の参照先を示します。 無停止で実行する処理 参照先 Data ONTAPのアップグレード Clustered Data ONTAP 8.3 Upgrade and Revert/Downgrade Guide ハードウェアFRUコンポーネントの交換 プラットフォームに対応するFRUの手順 ネットアップのマニュアル:「Product Library AZ」 プラットフォームに対応するFRUの一覧につい ては、Hardware Universeで確認できます。 NetApp Hardware Universe Data ONTAP 8.2.1以降を実行するシステムでのディスク シェルフま たはループのホットリムーブ Data ONTAP 8.2.1以降を実行しているシステムでは、DS14ディスク シェルフを使用したclustered Data ONTAPのマルチパスHA構成でディスク シェルフのホットリムーブが可能です。システムを停 止せずにデータの提供を継続したまま、ディスクドライブからアグリゲートを削除済みのディスク シ ェルフを物理的に取り外すことができます。ホットリムーブでは、ディスク シェルフのループから任 意のディスク シェルフを取り外したり、ディスク シェルフのループ全体を取り外したりできます。 開始する前に • SASディスク シェルフがある場合は実行できません。 124 | ハイアベイラビリティ構成ガイド SASディスク シェルフを使用するclustered Data ONTAPシステムの場合は、該当するガイドを参 照してください。 SAS Disk Shelves Installation and Service Guide for DS4243, DS2246, DS4486, and DS4246 • ストレージ システムでData ONTAP 8.2.1以降が実行されている必要があります。 • マルチパスHA構成のストレージ システムである必要があります。 • FAS2240構成では、外付けストレージがマルチパスHA構成で接続されている必要があります。 • 取り外すディスク シェルフのディスクドライブからすべてのアグリゲートを削除しておく必要があ ります。 注意: 取り外すディスク シェルフにアグリゲートが含まれた状態でこの手順を実行しようとす ると、システムでエラーが発生し、複数のディスクがパニック状態になることがあります。 クラスタ システムでアグリゲートをオフラインにする方法については、『clustered Data ONTAP物 理ストレージ管理ガイド』の「アグリゲートの管理用コマンド」を参照してください。このドキュメン トは、ネットアップ サポート サイト(mysupport.netapp.com)で公開されています。 • ベストプラクティスとして、取り外すディスク シェルフのディスクドライブからアグリゲートを削除 したあとに、ディスクドライブの所有権を削除することを推奨します。 注: ここでは、このベストプラクティスに従っていることを前提として、ディスクドライブの所有 権を削除した場合の手順を示しています。 ディスクドライブの所有権を削除する方法については、『clustered Data ONTAP物理ストレージ 管理ガイド』の「ディスクから所有権を削除する」手順を参照してください。このドキュメントは、ネ ットアップ サポート サイト(mysupport.netapp.com)で公開されています。 注: ディスクドライブの所有権を削除する場合、ディスクの自動割り当てを無効にする必要が あります。ディスクの自動割り当ては、ここで説明するシェルフのホットリムーブ手順の最後 にプロンプトに従って再度有効にすることができます。 • マルチパスHA構成がテイクオーバー状態のときには実行できません。 • ループから1つ以上のディスク シェルフを取り外す場合は、取り外すディスク シェルフをバイパ スする距離を考慮する必要があります。そのため、現在のケーブルでは長さが足りない場合 は、もっと長いケーブルを用意する必要があります。 サポートされるケーブルについては、Hardware Universe(hwu.netapp.com)を参照してください。 タスク概要 • この手順では、ケーブル配線のベストプラクティスに従います。そのため、この手順で言及して いるモジュールおよびモジュールの入力と出力のSASポートは、いずれもベストプラクティスに 準拠しています。ストレージ システムのケーブル配線方法がベストプラクティスと異なる場合 は、モジュールやモジュールの入力と出力のSASポートが異なることがあります。 • パスAは、ディスク シェルフ上段に設置された、Aサイドのディスク シェルフ モジュール(モジュ ールA)です。 HAペアでの無停止操作 | 125 • パスBは、ディスク シェルフ下段に設置されたBサイドのディスク シェルフ モジュール(モジュー ルB)です。 • ループの最初のディスク シェルフとは、入力ポートがコントローラに直接接続されたディスク シ ェルフです。 • ループの中間のディスク シェルフとは、ループの他のディスク シェルフに直接接続されたディ スク シェルフです。 • ループの最後のディスク シェルフとは、出力ポートがコントローラに直接接続されたディスク シ ェルフです。 • 次のディスク シェルフとは、ループ内で取り外すディスク シェルフの1つ後ろに位置するディス ク シェルフです。 • 前のディスク シェルフとは、ループ内で取り外すディスク シェルフよりも1つ前に位置するディス ク シェルフです。 • clustered Data ONTAPと7-Modeの両方のコマンドを使用するため、クラスタシェルとノードシェ ルからコマンドを入力します。 手順 1. いずれかのコントローラのノードシェルで次のコマンドを入力して、システム構成がMultiPath HAであることを確認します。 sysconfig システムで検出が完了するまで、1分程度かかる場合があります。 構成はSystem Storage Configurationフィールドに表示されます。 注: 外付けストレージを使用するFAS2240システムに対する出力は、Mixed-Path HAになり ます。内蔵ストレージはシングルパスHA構成で接続され、外付けストレージはマルチパス HA構成で接続されるためです。 注意: FAS2240以外のシステムで、Multi-Path HA以外の値が出力された場合、この手順 を続行することはできません。この手順の「開始する前に」のセクションに記載された前提条 件を確認してください。 2. 次の手順を実行して、取り外すディスク シェルフのディスクドライブにアグリゲートがないこと (スペアであること)、および所有権が削除されていることを確認します。 a. いずれかのコントローラのクラスタシェルで次のコマンドを入力します。 storage disk show -shelf shelf_number b. 出力をチェックし、取り外すディスク シェルフのディスクドライブにアグリゲートがないことを 確認します。 ディスクドライブにアグリゲートがない場合、Aggregate列にダッシュが表示されます。 126 | ハイアベイラビリティ構成ガイド 注意: 取り外すディスク シェルフのディスクドライブにアグリゲートがある場合、この手順を 続行することはできません。この手順の「開始する前に」のセクションに記載された前提 条件を確認してください。 c. 出力をチェックし、取り外すディスク シェルフのディスクドライブから所有権が削除されてい るか、ディスクドライブが障害状態であることを確認します。 出力の内容 操作 すべてのディスクド 次の手順へ進みます。 ライブについて 取り外すディスク シェルフのディスクドライブは適切な状態です。 unassignedまたは brokenと表示される 取り外すディスク シ ェルフに所有権が割 り当てられたディス クドライブがある この手順の「開始する前に」のセクションで紹介している、「ディス クから所有権を削除する」手順を実行します。 例 storage disk show -shelf 3コマンドの出力を次に示します。この出力で、取り外すディス ク シェルフ(ディスク シェルフ3)にあるディスクドライブの状態を確認できます。ディスク シェル フ3のすべてのディスクドライブについて、Aggregate列にダッシュが表示されています。2本の ディスクドライブは所有権が削除されており、Container Type列にunassignedと表示されて います。2本のディスクドライブは障害状態になっており、Container Type列にbrokenと表示 されています。 cluster::> storage disk show -shelf 3 Usable Disk Disk Size Shelf Bay Type -------- -------- ----- --- -----... 1.3.4 3 4 SAS 1.3.5 3 5 SAS 1.3.6 3 6 SAS 1.3.7 3 7 SAS ... Container Container Type Name Owner ----------- ---------- --------unassigned unassigned broken broken - - 3. 取り外すディスク シェルフを物理的に特定できるように、取り外すディスク シェルフのそれぞれ について、次の手順を実行してLEDを点灯します。 この手順の後半でパスAとパスBのケーブルを正しく再接続できるように、取り外すディスク シ ェルフを確認しておく必要があります。 このコマンドはいずれかのコントローラのノードシェルから入力します。 a. 取り外す各ディスク シェルフのディスクドライブを特定します。 HAペアでの無停止操作 | 127 fcadmin device_map 例 この出力では、ループ内の3台のディスク シェルフについて、それぞれにマッピングされた 14本のディスクドライブが表示されています。ディスク シェルフ3を取り外す場合は、ディスク ドライブ45 44 43 42 41 40 39 38 37 36 35 34 33 32が該当します。 fas6200> fcadmin device_map Loop Map for channel 0c: ... Shelf mapping: Shelf 3: 45 44 43 42 Shelf 4: 77 76 75 74 Shelf 5: 93 92 91 90 ... 41 73 89 40 72 88 39 71 87 38 70 86 37 69 85 36 68 84 35 67 83 34 66 82 33 65 81 32 64 80 b. 手順aで特定したディスクドライブのLEDを点灯します。 led_on disk_name このコマンドを実行するにはadvanced権限レベルが必要です。 ディスクドライブの前面にある障害LEDが点灯します。さらに、取り外すディスク シェルフに 障害状態のディスクドライブがある場合は、それらのディスクドライブの前面にあるアクティ ビティLEDが点滅します。 取り外すディスク シェルフを視覚的に特定できるように、少なくとも4本のディスクドライブの LEDを点灯することを推奨します。このコマンドは、各ディスクドライブについて実行する必 要があります。 例 手順aで特定したディスク シェルフ3のディスクドライブ0c.45の障害LEDを点灯するには、 「led_on 0c.45」と入力します。 4. ディスク シェルフのループ全体を取り外す場合は、以下の手順を実行します。それ以外の場合 は、次の手順に進みます。 a. パスAおよびパスBのすべてのケーブルを外します。 これには、取り外すループのすべてのディスク シェルフとコントローラ、およびシェルフ同士 を接続するケーブルが含まれます。 b. 手順8に進みます。 5. ループから1台以上のディスク シェルフを取り外す(ループは残す)場合は、該当する一連の手 順を実行して、パスAの該当するループ接続を、取り外すディスク シェルフを迂回してケーブル をつなぎ直します。 128 | ハイアベイラビリティ構成ガイド ディスク シェルフを複数取り外す場合は、該当する一連の手順を各ディスク シェルフに対して 実行します。 システムのケーブル配線図が必要な場合は、各プラットフォームに付属のセットアップ ガイドを 参照してください。このドキュメントは、ネットアップ サポート サイト(mysupport.netapp.com)でも 参照できます。ご使用のプラットフォームに対応するドキュメントを検索してください。たとえば、 FAS3200システム向けのセットアップ ガイドを探す場合は、「FAS3200シリーズ」を検索してくだ さい。 取り外す機器 操作 ループの最初のディスク シェ a. ルフ b. ループの中間のディスク シェ a. ルフ b. ループの最後のディスク シェ a. ルフ b. 最初のディスク シェルフにあるモジュールAの出力ポートとループ の2番目のディスク シェルフにあるモジュールAの入力ポートを接続 するケーブルを取り外します。 最初のディスク シェルフにあるモジュールAの入力ポートからコント ローラに接続されているケーブルを外し、ループの2番目のディスク シェルフにあるモジュールAの入力ポートに接続します。 取り外すディスク シェルフにあるモジュールAの出力ポートとループ の次のディスク シェルフにあるモジュールAの入力ポートを接続す るケーブルを取り外します。 取り外すディスク シェルフにあるモジュールAの入力ポートに接続 されているケーブルを外し、ループの次のディスク シェルフにある モジュールAの入力ポートに接続します。 最後のディスク シェルフにあるモジュールAの入力ポートとループ の前のディスク シェルフにあるモジュールAの出力ポートを接続す るケーブルを取り外します。 最後のディスク シェルフにあるモジュールAの出力ポートからコント ローラに接続されているケーブルを外し、ループの前のディスク シ ェルフにあるモジュールAの出力ポートに接続します。 6. いずれかのコントローラのノードシェルで次のコマンドを入力して、パスAのケーブル配線で取 り外すディスク シェルフが迂回され、取り外すディスク シェルフのすべてのディスクドライブがパ スBを通じて接続されていることを確認します。 storage show disk -p システムで検出が完了するまで、1分程度かかる場合があります。 例 正しい出力の例を次に示します。この例では、ディスク シェルフ3を取り外します。現在のプライ マリ パスはパスBであるため、パスBで接続された各ディスクドライブがPRIMARY列の各行に表 示され、1つ目のPORT列にBと表示されています。取り外すディスク シェルフにパスAで接続さ HAペアでの無停止操作 | 129 れたディスクドライブはないため、SECONDARY列と2つ目のPORT列には情報が表示されていま せん。 fas6200> storage show disk -p PRIMARY PORT ---------- ---... 0d.64 B 0d.65 B 0d.66 B 0d.67 B 0d.68 B 0d.69 B 0d.70 B 0d.71 B ... SECONDARY PORT SHELF BAY ---------- ---- --------3 3 3 3 3 3 3 3 0 1 2 3 4 5 6 7 注意: すべてのディスクドライブがパスBでのみ接続されていること以外を示す出力が表示さ れた場合は、手順5をもう一度実行してケーブル配線を修正する必要があります。 7. 次の手順を実行します。 a. パスBについて、手順5~6を実行します。 b. 手順1を実行して、システム構成がこの手順の開始前と同じであることを確認します。 c. 次の手順へ進みます。 8. この手順の準備作業としてディスクドライブから所有権を削除する際にディスクの自動割り当て を無効にした場合は、次のコマンドを入力してディスクの自動割り当てを再度有効にします。そ れ以外の場合は、次の手順に進みます。 storage disk option modify -autoassign on 各コントローラのクラスタシェルで該当するコマンドを入力します。 9. 切断したディスク シェルフの電源をオフにし、ディスク シェルフから電源コードを抜きます。 10. ラックまたはキャビネットからディスク シェルフを取り外します。 ディスク シェルフを軽くして扱いやすくするために、電源装置とモジュールを取り外します。過度 に動かすと内部が破損する可能性があるため、ディスクドライブやキャリアはできるだけ取り外 さないようにしてください。 関連コンセプト 推奨するモジュールの種類の変更方法(118ページ) 関連タスク モジュールのホットスワップ(120ページ) 130 | ハイアベイラビリティ構成ガイド HAペアのパス ステータスの判別(119ページ) 131 HAペアでのアグリゲートの所有権の切り替え HAペアのノード間で、アグリゲートからのデータ提供を中断せずに、アグリゲートの所有権を切り 替えることができます。 HAペアでは、両方のノードのディスクまたはアレイLUNが物理的に相互接続され、それぞれのデ ィスクまたはアレイLUNはどちらか一方のノードで所有されます。テイクオーバーの発生時にはデ ィスクの所有権が一時的に切り替わりますが、アグリゲートの再配置処理では、アグリゲートに含 まれるすべてのディスクまたはアレイLUNの所有権が永続的(負荷分散を行う場合など)または一 時的(テイクオーバー処理など)に一方のノードからもう一方のノードに切り替わります。所有権の 切り替え時に、データ コピー処理やディスクまたはアレイLUNの物理的な移動は行われません。 アグリゲートの再配置の仕組み アグリゲートの再配置では、HA構成の利点を活かして、ストレージ アグリゲートの所有権をHAペ ア内で移動します。アグリゲートの再配置では、フェイルオーバー時のパフォーマンスを最適化す るだけでなく、以前はコントローラ フェイルオーバーを必要としていた運用と保守に関する機能を 容易にすることで、ストレージ管理の柔軟性を向上します。 アグリゲートの再配置は、計画的なフェイルオーバー(無停止のソフトウェア アップグレードなど) の際の停止時間を短縮するために、テイクオーバーを手動で開始したときは自動的に実行されま す。パフォーマンスの負荷分散、システムの保守、および無停止のコントローラ アップグレードの ためのフェイルオーバーとは関係なく、アグリゲートの再配置を手動で開始できます。ただし、アグ リゲートの再配置処理を使用してルート アグリゲートの所有権を移動することはできません。 HAペアでアグリゲートaggr_1の所有権をノード1からノード2に切り替える例を次に示します。 132 | ハイアベイラビリティ構成ガイド アグリゲートに含まれるボリューム数に対応できるデスティネーション ノードであれば、アグリゲー トの再配置処理で1つまたは複数のSFOアグリゲートの所有権を切り替えることができます。各ア グリゲートへのアクセスの中断は短時間で済み、それらの所有権情報が1つずつ変更されます。 テイクオーバーを手動で開始したあとは、テイクオーバーの実行時にアグリゲートの再配置が自動 的に実行されます。対象のコントローラをテイクオーバーする前に、各コントローラのアグリゲート の所有権がパートナー コントローラに一度に1つずつ移動されます。ギブバックが開始されると、所 有権は元のノードに自動的に戻されます。テイクオーバーの実行時にアグリゲートの再配置が実 行されないようにするには、storage failover takeoverコマンドで‑bypass‑optimizationパ ラメータを使用します。 アグリゲートの再配置とSnapDiffを有効にしたInfinite Volume SnapDiffを有効にしたInfinite Volumeで使用されているアグリゲートについては、アグリゲートの再 配置を行う際に追加の手順が必要になります。具体的には、デスティネーション ノードにネームス ペース ミラー コンスティチュエントがあることを確認し、ネームスペース コンスティチュエントを含む アグリゲートを再配置するかどうかを判断する必要があります。 Clustered Data ONTAP 8.3 Infinite Volumes Management Guide 関連コンセプト テイクオーバー処理やギブバック処理に対するHAポリシーの影響(28ページ) ルートデータのパーティショニングがアグリゲートの再配置に及ぼす 影響 ルートデータのパーティショニング(共有ディスクとも呼ばれます)を使用するプラットフォーム モデ ルがある場合は、物理(非共有)ディスクと同様にアグリゲートの再配置処理が実行されます。 アグリゲートの再配置時にコンテナ ディスクの所有権がデスティネーション ノードに切り替えられ るのは、対象の物理ディスク上のすべてのパーティションの所有権がデスティネーション ノードに 移行される場合のみです。この所有権の変更は、永続的なアグリゲートの再配置処理が実行され る場合のみ発生します。 ネゴシエート ストレージ フェイルオーバーのテイクオーバーまたはギブバックの際に発生する所有 権の変更は一時的なものです。 関連コンセプト エントリレベルおよびオールフラッシュFASストレージ システムにおけるルートデータ パーティシ ョニングの利点(39ページ) 関連情報 clustered Data ONTAP 8.3 物理ストレージ管理ガイド HAペアでのアグリゲートの所有権の切り替え | 133 アグリゲートの所有権の切り替え アグリゲートの所有権の切り替えは、HAペアのノード間でのみ実行できます。 タスク概要 • アグリゲートの再配置処理では、ボリューム数の制限がプログラムで検証されるため、手動で チェックする必要はありません。 ボリューム数がサポートされる上限を超えると、アグリゲートの再配置処理が失敗し、関連する エラー メッセージが表示されます。 • ソース ノードまたはデスティネーション ノードでシステムレベルの処理を実行中のときは、アグ リゲートの再配置を開始しないでください。同様に、アグリゲートの再配置の実行中にシステム レベルの処理を開始することも避けてください。 システムレベルの処理には次のものが含まれます。 ◦ テイクオーバー ◦ ギブバック ◦ シャットダウン ◦ 別のアグリゲートの再配置処理 ◦ ディスク所有権の変更 ◦ アグリゲートまたはボリュームの設定処理 ◦ ストレージ コントローラの交換 ◦ Data ONTAPのアップグレード ◦ Data ONTAPのリバート • MetroCluster構成を使用する場合は、ディザスタ リカバリ処理(スイッチオーバー、復旧、また はスイッチバック)の実行中にアグリゲートの再配置を開始しないでください。 • MetroCluster構成を使用する場合に、切り替えられたアグリゲートでアグリゲートの再配置を開 始すると、DRパートナーのボリューム数の制限を超えるため、処理が失敗する可能性がありま す。 • 壊れているアグリゲートや保守中のアグリゲートでは、アグリゲートの再配置を開始しないでく ださい。 • オールフラッシュで最適化されたFAS80xxシリーズ システムの場合、HAペアの両方のノードが オールフラッシュで最適化されている必要があります。 オールフラッシュで最適化された構成でサポートされるのはSSDだけであるため、HAペアの一 方のノードにHDDまたはアレイLUNが含まれている(したがって、ノードがオールフラッシュで 134 | ハイアベイラビリティ構成ガイド 最適化されていない)場合は、そのノードからオールフラッシュで最適化されているノードへの アグリゲートの再配置を実行することはできません。 • ソース ノードがSnapDiffを有効にしたInfinite Volumeで使用されている場合は、アグリゲートの 再配置を開始する前に追加の手順を実行し、そのあとに特定の方法で再配置を実行する必要 があります。 具体的には、デスティネーション ノードにネームスペース ミラー コンスティチュエントがあること を確認し、ネームスペース コンスティチュエントを含むアグリゲートを再配置するかどうかを判 断する必要があります。 Clustered Data ONTAP 8.3 Infinite Volumes Management Guide • アグリゲートの再配置を開始する前に、ソース ノードとデスティネーション ノードにコア ダンプを 保存する必要があります。 手順 1. ノードのアグリゲートを表示して、移動するアグリゲートがオンラインの良好な状態になっている ことを確認します。 storage aggregate show -node source-node 例 次のコマンドの出力では、クラスタ内の4つのノードにある6つのアグリゲートが表示され、どの アグリゲートもオンラインになっています。ノード1とノード3がHAペアになっており、ノード2とノ ード4もHAペアになっています。 cluster::> storage aggregate show Aggregate Size Available Used% State #Vols Nodes RAID Status --------- -------- --------- ----- ------- ------ ------ ----------aggr_0 239.0GB 11.13GB 95% online 1 node1 raid_dp, normal aggr_1 239.0GB 11.13GB 95% online 1 node1 raid_dp, normal aggr_2 239.0GB 11.13GB 95% online 1 node2 raid_dp, normal aggr_3 239.0GB 11.13GB 95% online 1 node2 raid_dp, normal aggr_4 239.0GB 238.9GB 0% online 5 node3 raid_dp, normal aggr_5 239.0GB 239.0GB 0% online 4 node4 raid_dp, normal 6 entries were displayed. 2. 次のコマンドを実行して、アグリゲートの再配置を開始します。 storage aggregate relocation start -aggregate-list aggregate-1, aggregate-2... -node source-node -destination destination-node アグリゲートaggr_1およびaggr_2をノード1からノード3に移動するコマンドを次に示します。ノー ド3はノード1のHAパートナーです。アグリゲートはHAペア内でのみ移動できます。 HAペアでのアグリゲートの所有権の切り替え | 135 cluster::> storage aggregate relocation start -aggregate-list aggr_1, aggr_2 -node node1 -destination node3 Run the storage aggregate relocation show command to check relocation status. node1::storage aggregate> 3. storage aggregate relocation showコマンドを使用して、アグリゲートの再配置の進捗 を監視します。 storage aggregate relocation show -node source-node 例 次のコマンドの出力は、アグリゲートをノード3に移動中であることを示しています。 cluster::> storage aggregate relocation show -node node1 Source Aggregate Destination Relocation Status ------ ----------- ------------- -----------------------node1 aggr_1 node3 In progress, module: wafl aggr_2 node3 Not attempted yet 2 entries were displayed. node1::storage aggregate> 再配置が完了すると、このコマンドの出力に表示される各アグリゲートの再配置の状態がDone になります。 関連コンセプト エントリレベルおよびオールフラッシュFASストレージ システムにおけるルートデータ パーティシ ョニングの利点(39ページ) ディスク ファームウェアのバックグラウンド更新とテイクオーバー、ギブバック、およびアグリゲー トの再配置(30ページ) アグリゲートの再配置用のコマンド Data ONTAPには、HAペアでアグリゲートの所有権を切り替えるための固有のコマンドが用意され ています。 状況 使用するコマンド アグリゲートの再配置プロセスを開始する storage aggregate relocation start アグリゲートの再配置プロセスを監視する storage aggregate relocation show 関連情報 Clustered Data ONTAP 8.3 Commands: Manual Page Reference 136 | ハイアベイラビリティ構成ガイド storage aggregate relocation startコマンドの主なパラメータ ここでは、HAペアでアグリゲートの所有権を切り替える際に使用するstorage aggregate relocation startコマンドの主なパラメータを示します。 パラメータ 説明 -node nodename アグリゲートを現在所有しているノードの名前 を指定します。 -destination nodename アグリゲートを再配置するデスティネーション ノードを指定します -aggregate-list aggregate name ソース ノードからデスティネーション ノードに再 配置するアグリゲート名のリストを指定しま す。 (このパラメータではワイルドカードを使用でき ます。) -override-vetoes true|false 再配置処理の実行時に拒否のチェックを無視 するかどうかを指定します。 このオプションを使用すると、クライアントの停 止が長引いたり、処理の完了後にアグリゲート とボリュームがオンラインに復帰しない可能性 があります。 HAペアでのアグリゲートの所有権の切り替え | 137 パラメータ 説明 -relocate-to-higher-version true| false ソース ノードよりも上位のバージョンのData ONTAPを実行しているノードにアグリゲートを 再配置するかどうかを指定します。 • ‑relocate‑to‑higher-version trueパ ラメータを使用して、Data ONTAP 8.2を実 行しているノードからData ONTAP 8.3以降 を実行しているノードへのアグリゲートの再 配置を実行することはできません。 最初にソース ノードをData ONTAP 8.2.1以 降にアップグレードしてから、このパラメー タを使用してアグリゲートの再配置処理を 実行する必要があります。 同様に、Data ONTAP 8.3にアップグレード するには、先にData ONTAP 8.2.1以降にア ップグレードしておく必要があります。 • -override-destination-checks true| false Data ONTAPの異なるマイナー バージョン を実行しているノード間(8.2.1から8.2.2、 8.2.2から8.2.1など)でアグリゲートの再配 置を実行することは可能ですが、上位のメ ジャー バージョンから下位のメジャー バー ジョン(8.3から8.2.2など)へのアグリゲート の再配置処理を実行することはできませ ん。 デスティネーション ノードで実行されるチェック をアグリゲートの再配置処理で無視するかどう かを指定します。 このオプションを使用すると、クライアントの停 止が長引いたり、処理の完了後にアグリゲート とボリュームがオンラインに復帰しない可能性 があります。 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage aggregate relocation start - Relocate aggregates to the specified destination Clustered Data ONTAP 8.3 Upgrade and Revert/Downgrade Guide 138 | ハイアベイラビリティ構成ガイド アグリゲートの再配置時の拒否とデスティネーションのチェック アグリゲートの再配置処理では、アグリゲートの再配置を問題なく完了できるかどうかがData ONTAPで確認されます。アグリゲートの再配置が拒否された場合、EMSメッセージを調べて原因 を特定する必要があります。その理由に応じて、拒否を無視しても問題がないかどうかを判断する ことができます。 storage aggregate relocation showコマンドを実行すると、アグリゲートの再配置の進捗が 表示されます。再配置が拒否された場合は、拒否したサブシステムも表示されます。拒否の中に は、無視してもかまわないソフトなものと、強制しても無視できないハードなものがあります。 次のコマンドを使用して、ギブバックの拒否に関するEMSの詳細を確認できます。 event log show -node * -event gb* 次のコマンドを使用して、アグリゲートの再配置に関するEMSの詳細を確認できます。 event log show -node * -event arl* 次の表に、ソフトな拒否とハードな拒否の両方について、推奨される対処方法を示します。 アグリゲートの再配置時の拒否のチェック 拒否しているサブシステ ム モジュール 対処方法 Vol Move アグリゲートでホストされているいずれかのボリュームがボリューム 移動の対象になっている場合、そのボリューム移動がカットオーバ ー状態になると、アグリゲートの再配置が拒否されます。 ボリュームの移動が完了するまで待ちます。 この拒否を無視した場合、アグリゲートの再配置の完了後にカットオ ーバーが自動的に再開されます。アグリゲートの再配置によって移 動処理の回数が再試行回数(デフォルトでは3回)を超えた場合は、 volume move trigger-cutoverコマンドを使用して手動でカット オーバーを開始する必要があります。 Backup アグリゲートでホストされているボリュームでダンプ ジョブまたはリス トア ジョブを実行中の場合、アグリゲートの再配置が拒否されます。 実行中のダンプ処理またはリストア処理が完了するまで待ちます。 この拒否を無視した場合、バックアップ処理またはリストア処理は中 止され、バックアップ アプリケーションで再開する必要があります。 HAペアでのアグリゲートの所有権の切り替え | 139 拒否しているサブシステ ム モジュール 対処方法 Lock Manager この問題を解決するには、ファイルを開いているCIFSアプリケーショ ンを適切な手順でシャットダウンするか、それらのボリュームを別の アグリゲートに移動します。 この拒否を無視すると、CIFSのロック状態が解除され、システムの 停止やデータの損失の原因になります。 Lock Manager NDO ロックがミラーされるまで待ちます。 この拒否は無視できません。無視すると、Microsoft Hyper-V仮想マ シンの処理が停止します。 RAID EMSメッセージを調べて拒否の原因を特定します。 ディスクの追加処理またはディスク所有権の再割り当て処理を実行 中の場合は、それらの処理が完了するまで待ちます。 ミラーの再同期、ミラーの検証、またはディスクのオフライン化が原 因で拒否された場合は無視してかまいません。これらの処理は、再 配置後に再開されます。 アグリゲートの再配置時のデスティネーションのチェック 拒否しているサブシステ ム モジュール 対処方法 Disk Inventory アグリゲートに属するディスクにデスティネーション ノードで認識でき ないものがあると、アグリゲートの再配置が失敗します。 ストレージのケーブルに緩んでいるものがないかどうか調べ、再配 置するアグリゲートに属するディスクにデスティネーションからアクセ スできることを確認します。 このチェックは無視できません。 WAFL 再配置を行うとデスティネーションの最大ボリューム数や最大ボリュ ーム サイズの制限を超えてしまう場合、アグリゲートの再配置が失 敗します。 このチェックは無視できません。 Lock Manager NDO 次の場合にアグリゲートの再配置が失敗します。 • アグリゲートの再配置用にロックを再構築するためのロック マネ ージャのリソースがデスティネーションに十分にない場合 • デスティネーション ノードでロックを再構築中の場合 数分待ってからアグリゲートの再配置をもう一度実行します。 このチェックは無視できません。 140 | ハイアベイラビリティ構成ガイド 拒否しているサブシステ ム モジュール 対処方法 Lock Manager アグリゲートの再配置用にロックを再構築するためのロック マネージ ャのリソースがデスティネーションに十分にない場合、アグリゲート の永続的な再配置が失敗します。 数分待ってからアグリゲートの再配置をもう一度実行します。 このチェックは無視できません。 RAID EMSメッセージを調べてエラーの原因を特定します。 • アグリゲートの名前またはUUIDの競合が原因である場合は、ト ラブルシューティングを行ってその問題を解決します。このチェッ クは無視できません。 再配置を行うとデスティネーションの最大アグリゲート数、システム 容量、またはアグリゲート容量の制限を超えてしまう場合、アグリゲ ートの再配置が失敗します。このチェックは無視しないでください。 関連情報 clustered Data ONTAP 8.3マニュアル ページ:storage aggregate relocation show - Display relocation status of an aggregate 141 著作権に関する情報 Copyright © 1994–2015 NetApp, Inc. All rights reserved. Printed in the U.S. このドキュメントは著作権によって保護されています。著作権所有者の書面による事前承諾がある 場合を除き、画像媒体、電子媒体、および写真複写、記録媒体、テープ媒体、電子検索システム への組み込みを含む機械媒体など、いかなる形式および方法による複製も禁止します。 ネットアップの著作物から派生したソフトウェアは、次に示す使用許諾条項および免責条項の対象 となります。 このソフトウェアは、ネットアップによって「現状のまま」提供されています。ネットアップは明示的な 保証、または商品性および特定目的に対する適合性の暗示的保証を含み、かつこれに限定され ないいかなる暗示的な保証も行いません。ネットアップは、代替品または代替サービスの調達、使 用不能、データ損失、利益損失、業務中断を含み、かつこれに限定されない、このソフトウェアの 使用により生じたすべての直接的損害、間接的損害、偶発的損害、特別損害、懲罰的損害、必然 的損害の発生に対して、損失の発生の可能性が通知されていたとしても、その発生理由、根拠と する責任論、契約の有無、厳格責任、不法行為(過失またはそうでない場合を含む)にかかわら ず、一切の責任を負いません。 ネットアップは、ここに記載されているすべての製品に対する変更を随時、予告なく行う権利を保 有します。ネットアップによる明示的な書面による合意がある場合を除き、ここに記載されている製 品の使用により生じる責任および義務に対して、ネットアップは責任を負いません。この製品の使 用または購入は、ネットアップの特許権、商標権、または他の知的所有権に基づくライセンスの供 与とはみなされません。 このマニュアルに記載されている製品は、1つ以上の米国特許、その他の国の特許、および出願 中の特許によ って保護されている場合があります。 権利の制限について:政府による使用、複製、開示は、DFARS 252.227-7103(1988年10月)および FAR 52-227-19(1987年6月)のRights in Technical Data and Computer Software(技術データおよび コンピュータソフトウェアに関する諸権利)条項の(c) (1) (ii)項、に規定された制限が適用されま す。 142 | ハイアベイラビリティ構成ガイド 商標に関する情報 NetApp、NetAppのロゴ、Go Further, Faster、ASUP、AutoSupport、Campaign Express、Cloud ONTAP、clustered Data ONTAP、Customer Fitness、Data ONTAP、DataMotion、Fitness、Flash Accel、Flash Cache、Flash Pool、FlashRay、FlexArray、FlexCache、FlexClone、FlexPod、 FlexScale、FlexShare、FlexVol、FPolicy、GetSuccessful、LockVault、Manage ONTAP、Mars、 MetroCluster、MultiStore、NetApp Insight、OnCommand、ONTAP、ONTAPI、RAID DP、 SANtricity、SecureShare、Simplicity、Simulate ONTAP、Snap Creator、SnapCopy、SnapDrive、 SnapIntegrator、SnapLock、SnapManager、SnapMirror、SnapMover、SnapProtect、SnapRestore、 Snapshot、SnapValidator、SnapVault、StorageGRID、Tech OnTap、Unbound Cloud、およびWAFL は米国またはその他の国あるいはその両方におけるNetApp,Inc.の登録商標です。ネットアップの 商標の最新のリストは、http://www.netapp.com/jp/legal/netapptmlist.aspxでご覧いただけます。 CiscoおよびCiscoのロゴは、米国およびその他の国におけるCisco Systems, Inc.の 商標です。そ の他のブランドまたは製品は、それぞれを保有する各社の商標または登録商標であり、相応の取 り扱いが必要です。 143 マニュアルの更新について 弊社では、マニュアルの品質を向上していくため、皆様からのフィードバックをお寄せいただく専用 のEメール アドレスを用意しています。また、GA/FCS版の製品マニュアルの初回リリース時や既 存マニュアルへの重要な変更があった場合にご案内させていただくTwitterアカウントもあります。 ご意見やご要望は、[email protected]までお寄せください。その際、担当部署で 適切に対応させていただくため、製品名、バージョン、オペレーティング システム、弊社営業担当 者または代理店の情報を必ず入れてください。 GA/FCS版の製品マニュアルの初回リリース時や既存マニュアルへの重要な変更があった場合の ご案内を希望される場合は、Twitterアカウント@NetAppDocをフォローしてください。 144 | ハイアベイラビリティ構成ガイド 索引 数字 2ノード スイッチレス クラスタ 16 C CFO HAポリシー 28 定義 28 CIFSセッション テイクオーバーの影響 26 Config Advisor 一般的な構成エラーの確認 79 ダウンロードと実行 79 D Data ONTAP 無停止アップグレード 123 無停止でのアップグレード, ドキュメント 123 DRホーム所有者 ディスク所有権の種類, 定義 31 E EMSメッセージ takeover impossible 33 F FRUの交換, 無停止 ドキュメント 123 H HA 2ノード クラスタでの構成 77 ha-config modifyコマンド HA状態の変更 74 ha-config showコマンド HA状態の確認 74 HAインターコネクト HAペア 7 ケーブル接続 57, 71 ケーブル接続, 32xxデュアルシャーシHA構成 58, 72 ケーブル接続, 80xxデュアルシャーシHA構成 59, 72 シングルシャーシとデュアルシャーシのHA構成 43 HA構成 サポートされるシステムによる違い 43 シングルシャーシとデュアルシャーシ 42 定義 7 ベストプラクティス 33 利点 7 HAの状態 コントローラ モジュール 74 シャーシ 74 HAペア 2ノード スイッチレス クラスタ 16 MetroCluster, 比較 16 UPSを使用する場合に必要な接続 73 ケーブル接続 46, 51 種類, 比較 13 ストレージ構成の種類 38 設置 46 設定の制限 34 設定要件 34 タイプ システム キャビネット型 47 装置ラック型 46 ミラー 18 ディスク シェルフの管理 115 フェイルオーバーを引き起こすイベント 21 ミラーのケーブル接続 60 HAペアとクラスタ 13 HAペアを搭載 Telcoタイプ ラック 46 システム キャビネット 47 HAポリシー CFO 28 SFO 28 HAモード 有効化 76 HDD 共有, 機能 39 共有の標準的なレイアウト 40 索引 | 145 L LIFの構成 ベストプラクティス 33 M MetroCluster HAペア, 比較 16 Microsoft Hyper-VのSMB 3.0セッション テイクオーバーの影響 26 N HAポリシー 28 SFO 28 再配置 28, 131, 133 所有権の変更 27, 28, 133 ルート 28, 33 アグリゲートの再配置 共有ディスクに対する影響 132 拒否の無視 138 コマンド 135 仕組み 131 進捗の監視 138 利点 131 ルートデータのパーティショニングに対する影響 132 HAポリシー 28 定義 28 SMBセッション テイクオーバーの影響 26 storage aggregate relocation startコマンド 主なパラメータ 136 アグリゲートの再配置によるストレージ コントローラの アップグレード, 無停止 ドキュメント 123 アグリゲートの再配置による無停止でのストレージ コ ントローラのアップグレード アグリゲートの再配置によるストレージ コントローラ のアップグレード, 無停止 123 ドキュメント 123 アグリゲートの所有権 再配置 131 アダプタ 4ポート ファイバチャネルHBA 52, 60 NVRAM 49 T い takeover impossible EMSメッセージ 33 Twitter マニュアルの変更に関する自動通知の受信方法 イプシロン テイクオーバーを手動で開始する場合の移動 109 イベント フェイルオーバーのトリガーに関する表 21 NVRAM アダプタ 49 S SFO 143 え U UPS HAペアでの必要な接続 73 エラー フェイルオーバーのトリガーに関する表 21 エントリレベル プラットフォーム ルートデータ パーティショニングの利点 39 あ アクティブ / アクティブ ストレージ構成 38 アクティブ / パッシブ ストレージ構成 38 アグリゲート CFO 28 お オールフラッシュで最適化されたシステム 設定の不一致がある場合の手動テイクオーバーの 条件 107 146 | ハイアベイラビリティ構成ガイド 2ノード クラスタでの構成 77 き ギブバック CFO(ルート)アグリゲートのみ 113 共有ディスクに対する影響 29 拒否 111 拒否の無視 113 コマンド 113 実行 111 自動実行の設定用コマンド 83 手動 113 進捗の監視 111, 113 中断 111 定義 20 テイクオーバー時の動作 27 テスト 87 部分的なギブバック 111 ルートデータのパーティショニングに対する影響 29 キャビネット ケーブル接続の準備 51 共有HDD 機能 39 共有HDDのレイアウト 標準的なHDD 40 共有ストレージ ループまたはスタック HAペア内 38 共有ドライブ 利点 39 拒否 アグリゲートの再配置 138 ギブバック 111 無視 111, 138 拒否の無視 ギブバック 111 く クラスタ 2ノードでのクラスタHAの構成 77 2ノードでのスイッチレス クラスタの構成 77 2ノードの場合の特別な構成設定 77 クラスタHA 2ノード クラスタでの構成 77 クラスタHA2ノード クラスタでの構成 無効化, 2ノード クラスタでノードを停止またはリブ ートする場合 105 クラスタとHAペア 13 クラスタ ネットワーク 13 クラスタ ハイアベイラビリティ け ケーブル接続 HAインターコネクト, クロス接続 57–59, 71, 72 HAペア 46 エラー メッセージ, クロス接続のHAインターコネクト 57–59, 71, 72 システム キャビネットの準備 51 装置ラックの準備 50 チャネルA, 標準HAペア 53 チャネルA, ミラーHAペア 62 チャネルB, 標準HAペア 55 チャネルB, ミラーHAペア 65 標準HAペアのHAインターコネクト 57, 71 標準HAペアのHAインターコネクト, 32xxシステム 58, 72 標準HAペアのHAインターコネクト, 80xxシステム 59, 72 要件 49 現在の所有者 ディスク所有権の種類, 定義 31 検証 テイクオーバーとギブバック 87 こ 高可用性 2ノード クラスタでの構成 77 構成方法の種類 ミラーHAペア 19 コマンド cf giveback(ギブバックの有効化) 87 cf takeover(テイクオーバーの開始) 87 ha-config modify 74 ha-config show 74 HA構成のステータス 90 HAモードの有効化 76 storage disk show -port(パスの表示) 119 storage failover giveback(ギブバックの有効化) 87 storage failover takeover(テイクオーバーの開始) 87 アグリゲートのホームのステータス 90 クラスタのHAステータス 90 自動ギブバックの設定用 83 自動テイクオーバーのポリシーの変更用 81 ストレージ フェイルオーバーのステータス 90 ストレージ フェイルオーバーの無効化 77 索引 | 147 ストレージ フェイルオーバーの有効化 77 テイクオーバー(すべてのステータス コマンドの説 明) 90 テイクオーバーなしでのノードの停止 104 テイクオーバーなしでのノードのリブート 104 ノードの状態の確認 91 ハードウェア アシスト テイクオーバーの設定用 79 コメント マニュアルに関するフィードバックの送信方法 143 コントローラ フェイルオーバー 引き起こすイベント 21 利点 9 さ 再配置 アグリゲート 131, 133 アグリゲートの所有権 131, 133 削除 ディスク シェルフ 123 し シェルフ HAペアでの管理 115 ホットリムーブ 123 シェルフ モジュール アップグレードまたは交換 117 システム キャビネット ケーブル接続の準備 51 搭載 47 システム構成 サポート対象によるHA構成の違い 43 自動ギブバック 仕組み 82 設定用コマンド 83 パラメータとギブバックに対する影響 85 自動テイクオーバー トリガー 82 ポリシーの変更用コマンド 81 シャーシの構成, シングルまたはデュアル 42 手動テイクオーバー オールフラッシュによる最適化の状態が一致しない システムでの動作 107 実行用コマンド 107 状態 ノードについての説明 91 情報 マニュアルの品質向上に関するフィードバックの送 信方法 143 所有権 ディスク, 種類 31 ディスク所有権の表示 31 パーティションの表示 31 所有者 ディスク所有権の種類, 定義 31 シングルシャーシHA構成 インターコネクト 43 図 42 す スイッチレス クラスタ 2ノード クラスタでの有効化 77 ステータス メッセージ ノードの状態の説明 91 ストレージ構成の種類 標準HAペア 38 ストレージ フェイルオーバー テイクオーバーとギブバックのテスト 87 無効化コマンド 77 有効化コマンド 77 スペア ディスク HAペア 7, 36 せ 制限事項 HAペアの設定 34 ミラーHAペア 36 設置 HAペア 46 システム キャビネット 47 装置ラック 46 設定 サポートされるシステムによるHA構成の違い 43 テイクオーバーとギブバックのテスト 87 そ 装置ラック 準備 50 搭載 46 装置ラックの準備 50 148 | ハイアベイラビリティ構成ガイド た 対称 ストレージ構成 38 単一点障害 定義 9 排除 9 分析 9 ち チャネルA ケーブル接続 53, 62 定義 36 チャネルB ケーブル接続 55, 65 つ ツール 必要なドキュメント 48 て 提案 マニュアルに関するフィードバックの送信方法 143 テイクオーバー CIFSセッションに対する影響 26 immediateオプションの動作 107 SMB 3.0セッションに対する影響 26 SMBセッションに対する影響 26 強制用コマンド 107 共有ディスクに対する影響 29 自動 20 手動 20 手動で開始する場合のイプシロンの移動 109 定義 20 テイクオーバー時の動作 26 テスト 87 ハードウェア アシスト 25, 37 ハードウェア アシスト テイクオーバー 80 ハードウェア アシスト テイクオーバーの設定用コマ ンド 79 発生する状況 20 発生に関する設定 81 ポリシーを変更するコマンド 81 理由 81 ルートデータのパーティショニングに対する影響 29 テイクオーバーの強制 immediateオプションの動作 107 コマンド 107 ディスク 共有HDDの機能 39 所有権の種類 31 所有権の表示 31 スライス, エントリレベルおよびオールフラッシュ FASのプラットフォームに対する利点 39 パーティショニングされたディスクを使用するための 要件 41 ディスク シェルフ HAペアでの管理 115 ホットリムーブ 123 マルチパスHAを使用したHAペアへの追加 115 モジュールについて 117 モジュールのホットスワップ 120 ディスクのスライス エントリレベルのプラットフォームに対する利点 39 ディスク ファームウェアのバックグラウンド更新 ギブバック 30 テイクオーバー 30 データ ネットワーク 13 テスト テイクオーバーとギブバック 87 デュアルシャーシHA構成 インターコネクト 43 図 42 電源装置 ベストプラクティス 33 と ドキュメント 必要なドキュメント 47 フィードバックの送信方法 143 変更に関する自動通知の受信方法 143 の ノードの状態 説明 91 は パーティショニング ルートデータ, 機能 39 ルートデータ, 使用するための要件 41 ルートデータ, 標準的なレイアウト 40 ルートデータ, 利点 39 索引 | 149 パーティション 所有権の表示 31 ハードウェア HAのコンポーネントの説明 12 コンポーネントの説明 12 単一点障害 9 ハードウェア アシスト テイクオーバー 設定用コマンド 79 テイクオーバー時間の短縮 25 引き起こすイベント 80 要件 37 ハードウェアの交換, 無停止 ドキュメント 123 排除 単一点障害 9 パニック テイクオーバーとギブバック 82 パラメータ storage failover modifyコマンドで自動ギブバックの 設定に使用 85 ひ 比較 HAペアの種類 13 非対称 ストレージ構成 38 標準HAペア HAインターコネクトのケーブル接続 57, 71 HAインターコネクトのケーブル接続, 32xxシステム 58, 72 HAインターコネクトのケーブル接続, 80xxシステム 59, 72 チャネルAのケーブル接続 53 チャネルBのケーブル接続 55 標準的なレイアウト 共有HDD 40 ふ ファイバチャネル ポート HAペア用の特定 52, 60 フィードバック マニュアルに関するコメントの送信方法 143 フェイルオーバー コントローラの利点 9 引き起こすイベント 21 フォールト トレランス HAペアでのサポート 7 プラットフォーム ルートデータ パーティショニングによるエントリレベ ルおよびオールフラッシュFASに対する利点 39 プレックス 要件, HAペア 36 へ ベストプラクティス HA構成 33 ほ ポート 使用するポートの特定 52, 60 ポート リスト ミラーHAペア用の作成 61 ホーム所有者 ディスク所有権の種類, 定義 31 ホットリムーブ ディスク シェルフ 123 ま マルチパスHAループ ディスク シェルフの追加 115 み ミラーHAペア 概要 18 ケーブル接続 60 種類 19 制限事項 36 設定要件 36 チャネルAのケーブル接続 62 チャネルBのケーブル接続 65 利点 18 ミラーリング NVMEMログ 7 NVRAMログ 7 む 無停止アップグレード Data ONTAP 123 Data ONTAP, ドキュメント 123 無停止操作 HAペアでのサポート 7 150 | ハイアベイラビリティ構成ガイド 無停止でのアグリゲートの再配置 7 無停止でのハードウェアの交換 シェルフ モジュール 117 ドキュメント 123 無停電電源装置 次を参照 : UPS ディスク シェルフ モジュールのホットスワップ 120 ドキュメント 47 ルートデータのパーティショニングの使用 41 ら ライセンス cf 76 不要 76 め メールボックス ディスク HAペア 7 も モジュール, ディスク シェルフ 概要 117 種類の変更に関する制限事項 117 推奨する種類の変更方法 118 テスト 118 ホットスワップ 120 元の所有者 ディスク所有権の種類, 定義 31 ゆ ユーティリティ Config Advisorによる一般的な構成エラーの確認 79 Config Advisorのダウンロードと実行 79 よ 要件 HAペアの設定 34 機器 49 ツール 48 り リブート テイクオーバーとギブバック 82 リブート後のギブバック 自動 82 る ルート アグリゲート CFO HAポリシー 28 ギブバック 28 データ ストレージ 33 ルートデータのパーティショニング アグリゲートの再配置に対する影響 132 ギブバック時の影響 29 仕組み 39 使用するための要件 41 テイクオーバー時の影響 29 標準的なレイアウト 40 利点 39 れ レイアウト 標準的な共有HDD 40
© Copyright 2026 Paperzz
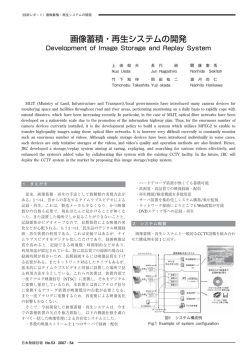
![[特集2] 拡大する天然ガス利用を支える日揮](http://s3.paperzz.com/store/data/005576471_1-6e6163653a519b409fd5a40267a60a5c-250x500.png)