メカトロニクス基礎
下 条 誠
2011 年 6 月版訂正 1.6
i
目次
第1章
序論
1
1.1
メカトロニクスとは . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
メカトロニクスの基本要素 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.3
メカトロニクスの特徴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4
我が国の経済を支えるメカトロニクス . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
第 I 部 A:電気電子要素技術
6
第2章
アナログ回路 (受動素子)
7
抵抗器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.1.1
抵抗器の特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.1.2
抵抗器の種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.1.3
抵抗値の表示(カラーコード) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
コンデンサ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2.1
コンデンサの特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.2.2
コンデンサの種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.2.3
コンデンサの表示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
コイル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
コイルの種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
受動素子とエネルギ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
アナログ回路 (能動素子)
20
3.1
半導体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
3.2
ダイオード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.2.1
ツェナーダイオード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.2.2
発光ダイオード(LED) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.2.3
フォトダイオード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
トランジスタ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
3.3.1
接合形トランジス . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
3.3.2
フォトトランジスタおよびその応用素子 . . . . . . . . . . . . . . . . . . . . . . . . .
28
3.3.3
トランジスタ命名法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
電界効果トランジスタ(field effect transistor,FET) . . . . . . . . . . . . . . . . . . . . .
30
接合形 FET の動作原理:ゲート電圧によるチャネルの制御 . . . . . . . . . . . . . . .
30
MOS 型トランジスタ(Metal Oxicide Semiconductor) . . . . . . . . . . . . . . . . . . . .
31
2.1
2.2
2.3
2.3.1
2.4
第3章
3.3
3.4
3.4.1
3.5
目次
3.6
第4章
ii
3.5.1
動作原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.5.2
トランジスタと電界効果トランジスタの違い . . . . . . . . . . . . . . . . . . . . . . .
32
整流素子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
3.6.1
サイリスタ(Silicon Controlled Rectifier ) . . . . . . . . . . . . . . . . . . . . . . .
33
3.6.2
GTO サイリスタ (Gate Turn-Off thyristor) . . . . . . . . . . . . . . . . . . . . . . .
35
3.6.3
トライアック(TRIAC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
3.6.4
パワーエレクトロニクスへの応用例
36
. . . . . . . . . . . . . . . . . . . . . . . . . . .
演算増幅器(オペアンプ)
38
4.1
演算増幅器の基礎
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
4.2
オペアンプ動作の解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
4.3
反転増幅器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
4.4
非反転増幅器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.4.1
ボルテージフォロワ回路
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.5
差動増幅器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
4.6
加算器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.7
積分器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.8
微分器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.9
リミッタ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.10
ピーク値検出回路
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.11
サンプルホールド回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
4.12
パワーオペアンプ
48
第5章
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ディジタル回路
49
ディジタル回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
論理演算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
5.2
基本論理素子 (AND, OR, NOT, NAND,NOR,XOR) . . . . . . . . . . . . . . . . . . . . .
50
5.3
論理素子の基本動作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
5.3.1
AND 素子基本動作例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
5.3.2
OR 素子基本動作例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.4
正論理と負論理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.5
マルチプレクサ (multiplexor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
5.6
デマルチプレクサ(demultiplexer)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
5.7
エンコーダ (encoder) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
デコーダ (decoder) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
5.8
R − S フリップフロップ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
5.9
D フリップフロップ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
5.10
カウンタ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
5.11
レジスタ/ラッチ
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
5.12
シフトレジスタ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
5.13
加算回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
5.13.1 半加算回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
5.1
5.1.1
5.7.1
目次
iii
5.13.2 全加算回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.13.3 n 桁の 2 進加算器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
減算回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
5.14.1 補数表現 (complement) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
n 桁の 2 進加減算器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
DA,AD 変換器
71
6.1
AD,DA 変換器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
6.2
DA 変換器 (Digital Analog Convertor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
抵抗回路網形 DA 変換器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
AD 変換器 (Analog Digital Convertor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
5.14
5.15
第6章
6.2.1
6.3
第 II 部 B:センサ・アクチュエータシステム技術
76
第7章
センサ
77
7.1
センサの性能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
7.2
変位の検出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
7.2.1
ポテンショメータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
7.2.2
差動変圧器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
7.2.3
レゾルバ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
7.2.4
ロータリーエンコーダ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
7.2.5
マグネスケール . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
速度・加速度の検出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
7.3
7.4
7.3.1
タコメータゼネレータ(略してタコゼネレータ,タコゼネ)
. . . . . . . . . . . . . .
83
7.3.2
加速度の検出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
力の検出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
ひずみゲージ (strain gage) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
温度の検出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
サーミスタ (thermistor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
86
7.4.1
7.5
7.5.1
第8章
アクチュエータ
87
8.1
アクチュエータの種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
8.2
モータの種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
88
8.3
直流(DC) モータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
8.3.1
基本原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
8.3.2
モータの出力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
8.3.3
モータの効率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
8.3.4
直流モータの選定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
93
交流(AC) モータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
96
8.4.1
回転磁界 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
96
8.4.2
同期モータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
96
8.4.3
誘導モータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
8.4
目次
iv
8.4.4
8.5
ブラシレス DC モータ
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
モータ駆動回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
8.5.1
電圧可変型の直流電源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
8.5.2
インバータ方式による周波数変換方式(DC → AC) . . . . . . . . . . . . . . . . . . 100
8.6
ステッピングモータ(パルスモータ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
8.7
油圧シリンダ,モータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
第9章
計算機のハードウェア
104
9.1
基本ハードウェア構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
9.2
ハードウェア動作の仕組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
9.3
9.4
9.2.1
バス (BUS) の仕組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
9.2.2
CPU の仕組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
9.2.3
命令の実行 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
主記憶装置(M ain M emory) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
9.3.1
メモリ装置の種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
9.3.2
メモリ装置の分類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
9.3.3
メモリ装置の性能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.3.4
メモリ階層 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
補助記憶装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.4.1
9.5
9.6
9.7
第 10 章
ハードディスク . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
割り込みの機能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
9.5.1
割り込み処理を用いる目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.5.2
割り込み処理の方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.5.3
<参考>割り込みの種類
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
コンピュータの基本ソフトウェア構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
9.6.1
オペレーションシステム(OS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
9.6.2
機械語プログラムとアセンブり言語
9.6.3
高水準言語とコンパイラ
. . . . . . . . . . . . . . . . . . . . . . . . . . . 114
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
ハードウェアとソフトウェアのトレードオフ . . . . . . . . . . . . . . . . . . . . . . . . . . 115
コンピュータにおける数表現
116
10.1
ビットとバイト . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
10.2
数値表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
10.2.1 整数表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
10.2.2 補数表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
10.2.3 2進補数表現での数の表現範囲 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
10.2.4 浮動小数点数表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
10.3
2進データの表記法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
10.4
文字(記号)表現
第 11 章
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
コンピュータネットワーク
122
11.1
ネットワーク . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
11.2
データ伝送と伝送速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
目次
v
11.3
伝送媒体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
11.4
ネットワーク間をつなぐための機器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
11.5
ネットワーク間をつなぐためのプロトコル . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
11.5.1 プロトコルの階層構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
11.5.2 データリンク層と物理層のプロトコル . . . . . . . . . . . . . . . . . . . . . . . . . . 125
11.5.3 TCP/IP (Transmission Control Protcol / Internet Protocol) . . . . . . . . . . . . . 126
11.6
インターネットの番地付(IP アドレス) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
11.6.1 IPアドレスの階層化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
11.7
IP アドレスと MAC アドレス . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
11.8
ドメイン名と DNS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
第 12 章
機械回路の記号解析
129
12.1
機械系と電気系における相似
12.2
量の話 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
12.3
モビリティ法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
vi
図目次
1.1
ロボットの中のメカトロニクス例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2
エレクトロニクスの基礎と応用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.3
メカトロニクスの構成要素とシステム構成例 . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4
メカトロニクスと産業別技術輸出額 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1
抵抗,コンデンサ,コイルの表記 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2
抵抗による電圧と電流の関係および発熱量 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.3
抵抗器の例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.4
抵抗器のカラーコード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.5
コンデンサ構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.6
容器への注水
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.7
コンデンサの特性例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.8
コンデンサの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
2.9
コンデンサの表示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
2.10 コンデンサの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.11 コイルの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
3.1
Si 原子の軌道上の電子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
3.2
半導体の種類。p型半導体とn型半導体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
3.3
ダイオードの仕組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.4
ダイオードの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.5
ツェナダイオード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.6
発光ダイオード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.7
フォトダイオード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.8
トランジスタの構造模式図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
3.9
トランジスタ原理図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
3.10 各種トランジスタの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.11 トランジスタ回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.12 フォトトランジスタ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
3.13 フォトカップラ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
3.14 フォトインターラプタ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.15 フォトリフレクター . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.16 フォトリフレクターの応用(ライトレースセンサ) . . . . . . . . . . . . . . . . . . . . . . .
30
3.17 FET の動作原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
図目次
vii
3.18 MOS の動作原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
3.19 ドレインソース間電圧とドレイン電流特性の例(n チャネル型 MOS) . . . . . . . . . . . . . .
33
3.20 サイリスタの基本構造と記号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.21 サイリスタの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
3.22 サイリスタを利用した回路の動作例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
3.23 GTO サイリスタ例とその記号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
3.24 トライアックの動作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
3.25 トライアック
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
3.26 パワーエレクトロニクスへの応用例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4.1
オペアンプの表記と等価回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
4.2
オペアンプとパッケージピン配列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
4.3
反転増幅器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
4.4
反転増幅器の増幅率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
4.5
非反転増幅器回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.6
ボルテージフォロワ回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
4.7
入力抵抗 出力抵抗の説明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
4.8
差動増幅器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.9
加算回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.10 積分回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
4.11 微分器回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
4.12 リミッタ回路
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.13 ピーク値検出回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
4.14 フォトリレー素子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
4.15 サンプルホールド回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
4.16 パワーオペアンプ例 (OPA541) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
5.1
ディジタル製品例 (携帯電話基盤とマイコン H8) . . . . . . . . . . . . . . . . . . . . . . . . .
49
5.2
基本論理素子
50
5.3
基本論理素子 (SN7400) 例
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
5.4
論理素子の出力と論理値 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
5.5
AND 論理素子の動作例 (Gate 回路) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.6
OR 論理素子の動作例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.7
マルチプレクサ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
5.8
マルチプレクサの構成例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
5.9
デマルチプレクサ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
5.10 デマルチプレクサの構成例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
5.11 デマルチプレクサの構成例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
5.12 R − S フリップフロップ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
5.13 D フリップフロップ (SN7474) とパッケージ配置 . . . . . . . . . . . . . . . . . . . . . . . .
58
5.14 D フリップフロップ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
5.15 D フリップフロップを用いたパルス数 1/2 逓減回路 . . . . . . . . . . . . . . . . . . . . . . .
60
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
図目次
viii
5.16 16 進カウンタの構成
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
5.17 4ビットのレジスタ/ラッチの構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
5.18 4ビットのシフトレジスタの構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
5.19 半加算器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
5.20 半加算器の記号と論理素子による構成法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.21 全加算器と半加算器による構成法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.22 16 個の全加算器による 16 桁の 2 進加算器の構成 . . . . . . . . . . . . . . . . . . . . . . . .
66
5.23 XOR 素子による反転・非反転操作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
5.24 16 桁の 2 進加減算器の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
6.1
アナログ量とディジタル量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
6.2
アナログ量とディジタル量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
6.3
AD 変換器と内部ブロックダイアグラム例 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
6.4
抵抗回路網形 DA 変換器。はしご形(ラダー)回路を利用 . . . . . . . . . . . . . . . . . . . .
74
6.5
AD 変換器 DA 変換器を用いた構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
7.1
メカトロニクスシステム概念図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
7.2
測定の真値,偏り,バラツキの関係 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
7.3
ポテンショメータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
7.4
差動変圧器の構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
7.5
レゾルバ(単相励磁・単相出力)と(2相励磁・単相出力) . . . . . . . . . . . . . . . . . . .
81
7.6
レゾルバの出力波形 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
7.7
エンコーダ原理図と正逆回転時における A 相 B 相出力のようす) . . . . . . . . . . . . . . .
82
7.8
エンコーダ原理図と正逆回転時における A 相 B 相出力のようす) . . . . . . . . . . . . . . .
82
7.9
サイズモ系を利用した加速度センサ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
7.10 歪みゲージの原理(抵抗線の伸びと抵抗値) . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
7.11 歪みゲージの原理(抵抗線の伸びと抵抗値) . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
7.12 歪みゲージを用いた力・トルクの計測例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
7.13 サーミスタの構造と温度特性例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
86
8.1
アクチュエータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
8.2
モータの種類
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
88
8.3
直流(DC) モータ原理図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
8.4
直流モータの等価回路とトルク・回転速度特性 . . . . . . . . . . . . . . . . . . . . . . . . . .
91
8.5
直流モータの特性(回生ブレーキと制動ブレーキ) . . . . . . . . . . . . . . . . . . . . . . .
91
8.6
直流モータの各種特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
93
8.7
周期的なトルク変化から定格トルクを計算する . . . . . . . . . . . . . . . . . . . . . . . . . .
94
8.8
モータとギヤを介して接続した負荷 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
8.9
モータとギヤを介して接続した負荷 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
96
8.10 回転磁界の発生原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
8.11 AC モータと回転磁界 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
8.12 回転磁界が導体を横切ることによる誘導電流 . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
8.13 パワートランジスタを用いた電圧制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
図目次
ix
8.14 ON-OFF 回路による電圧制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
8.15 インバータ方式による周波数変換方式(DC → AC) . . . . . . . . . . . . . . . . . . . . . . 100
8.16 ステップモータ原理図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
8.17 ステップモータの回転のようす . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
8.18 パスカルの原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
8.19 油圧モータの仕組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
9.1
コンピュータの基本構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
9.2
計算機システムの構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
9.3
CPU と外部装置との接続(バス構造) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
9.4
CPU の構成 (PDP-11 を例とする) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
9.5
ハードディスク装置の概念図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.6
割り込み処理について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.7
コンピュータの基本ソフトウェア構成
9.8
アプリケーションとハードウェアをつなぐコンピュータ言語 . . . . . . . . . . . . . . . . . . . 115
9.9
CPU の設計方針:CISC と RISC について . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
11.1 ネットワークの導線に流れる電気信号例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
11.2 ネットワークで信号を伝える信号線の種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
11.3 ネットワークの接続のレベル及び接続する機器 . . . . . . . . . . . . . . . . . . . . . . . . . . 124
11.4 CSMA/CD 方式によるデータ転送の仕組み . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
11.5 ネットワーク層とトランスポート層 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
11.6 ネットワーク層とトランスポート層 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
12.1 機械系と電気系における相似回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
12.2 相似回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
x
表目次
2.1
抵抗のカラー・コード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2
コンデンサ容量の許容差記号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3.1
トランジスタ命名法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
5.1
基本論理素子の真理値表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
5.2
2 進数 4 桁の場合の補数表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
5.3
2進補数表現での数の表現範囲 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
9.1
メモリの階層構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
9.2
割り込みベクタテーブル一部の例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
10.1 2 進数 4 桁の場合の補数表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
10.2 2進補数表現での数の表現範囲 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
10.3 -0.75 の浮動小数点表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
10.4 16 進表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
10.5 ISO コード(JIS コード) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
10.6 制御符号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
11.1 伝送媒体の違いによる伝送速度と延長可能距離 . . . . . . . . . . . . . . . . . . . . . . . . . . 124
12.1 流通量と位差量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
12.2 基礎方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
12.3 エネルギーの蓄積 (受動的) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
12.4 エネルギーの散逸 (受動的) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
1
第1章
序論
はじめに
メカトロニクス (Mechatronics) とは,”メカニクス (Mechanics)”+”エレクトロニクス (Electronics)”の2
つのことばを合わせた日本で作られた概念である。
現在の産業や社会を支えているエネルギー、生産、輸送などのシステムは、ロボット、自動車、産業機械、情報
機器などの高度なメカトロニクス技術を基盤としている。このメカトロニクス製品といわれるものは,ロボッ
トを初めとして,エンジン制御や自動運転に代表される自動車のインテリジェント化,洗濯機・冷蔵庫・VT
Rなどの家電製品,NCフライス・放電加工機などの加工機,半導体製造装置,プリンタや外部記憶装置など
のコンピュータ周辺機器,デジタル通信,携帯電話などの情報機器,空調や自動ドアなどの建物環境制御装置
などなどあらゆる分野に渡っている。本講義では,このメカトロニクスの基礎について述べる。
• メカトロニクス (Mechatronics)=メカニクス (Mechanics) + エレクトロニクス (Electronics)
1.1 メカトロニクスとは
メカニクスとは,機械技術のことを示し,工業製品の形と動作に関係する部分であり,エレクトロニクスと
は,電気・電子技術のことを示し,工業製品の制御と情報処理に関係する部分である。例えとして,メカトロ
ニクス技術をよく人間を例して説明されている。それによると次のようになる。
• メカニクスは,人間で例えると骨格,関節,筋肉に相当する部分
• エレクトロニクスは,人間で例えると制御,通信をつかさどる神経系・中枢に相当する部分
• メカトロニクスとは,人間のように,これらを統合し,知的な動作を巧みに行うシステムである
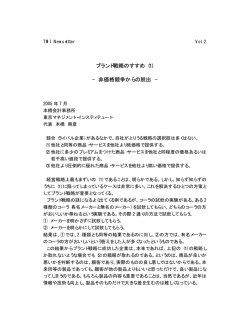
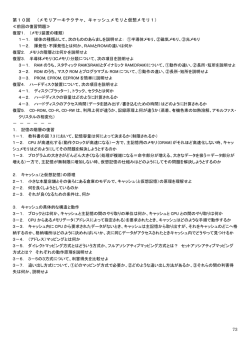
図 1.1 には,メカトロニクスの例としてロボットを示す。ロボットは,各種リンク機構,軸受け,減速機な
どのメカニズム,視覚,触覚,ジャイロなどのセンサ,それらを制御するためのコンピュータなどから構成さ
れている。一つ一つは奥が深い技術であり,真の理解には多くの知識が必要であろう。しかしながらここで問
題がある。このようなシステムを創造する開発者は,このよう広範な技術を理解し,まとめあげる必要がある
点である。ロボット開発を例にあげたが,現在の自動車,家電製品,船舶・航空機,携帯電話などの情報機器
等のあらゆる機械は,これら機械と電気・電子技術の統合技術として実現されているのが現状である。このよ
うに,これからのものづくりに係る技術者,研究者は,機械,電気,電子といった一つの専門分野のみの専門
家ではなく,広い視野から,適切な技術の選択を行い,これらを統合・融合する能力が真に必要とされる時代
となった。
1.2 メカトロニクスの基本要素
2
本講義では,主に機械系の学生を対象に行う。このため,通常の講義等で触れる機会の少ない,メカトロニク
ス技術に関係が深い,電気,電子,制御技術に関しての講義を主に行い,電気・電子技術が使える,技術者・
研究者となるための基礎を中心に講義を行う。
ᓮ↪ࠦࡦࡇࡘ࠲
ⷞⷡࡦࠨ
ᷫㅦᯏ
․ᱶ⚛᧚
ゲജࡦࠨ
⸅ⷡࡦࠨ
ᓮ࡙࠾࠶࠻
ฦ⒳ゲฃߌ
ࠫࡖࠗࡠࡦࠨ
ࡃ࠶࠹
㚟േ࡙࠾࠶࠻
ࠨࡏࡕ࠲
࠳ࠗࠢ࠻
࠼ࠗࡉࡕ࠲
࠾ࠕࠨࡏࡕ࠲
図 1.1: ロボットの中のメカトロニクス例
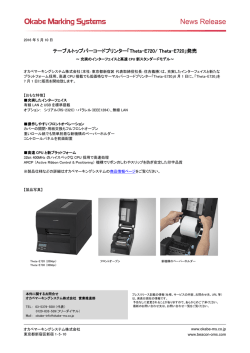
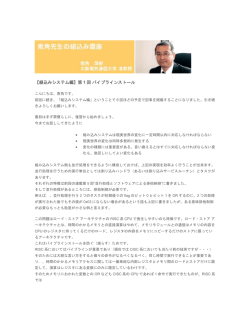
図 1.2 には,メカトロニクスの基礎技術と産業応用の広がりを示す。メカトロニクス技術の基礎には,機械,
電気・電子技術はもとより,制御,通信,情報技術が必要である。また,元来メカトロニクスとは,よいもの
を作り出すための最適な技術を求め,それらを組み合わせていく技術であるともいえる。このため,良い製品
を作るには,これら以外にも有用とあらば,それら技術を取り入れ統合・融合して行くことが良いと考える。
すなわち広い意味では,メカトロニクス技術とは確固とした枠組みがある技術なく,個々の有用な技術を統合
していく技術であると考えある。但し,講義ではそこまでは踏み込まず,メカトロニクスの基礎としての,機
械・電気・電子技術について説明を行う。
このメカトロニクスの産業応用としては,エネルギー・環境産業,自動車産業,ロボット産業,産業機械産
業,重電産業,家電産業,情報・通信産業,航空宇宙産業,建設・土木産業,医療福祉産業とあらゆる産業へ
と広がっている。メカトロニクス技術に関連する産業は,日本の産業技術輸出の中で 4 割程度を占め,70 兆円
以上の輸出額を示す我が国ものづくりを支える重要な技術である。
1.2 メカトロニクスの基本要素
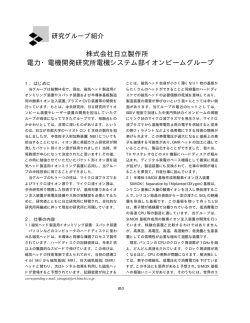
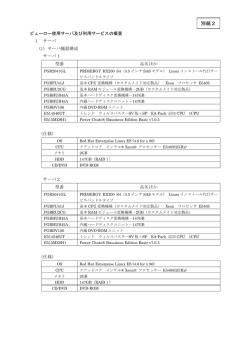
図 1.3 に,メカトロニクスの構成要素と,それらを用いた典型的なシステム構成例としてのフィードバック
系を示す.このフィードバック系動作を説明する例として,ロボットハンドで物体を把持する場合を考えてみ
よう。目標量は,対象物の位置とする。まず視覚センサで対象物の位置を計測し,位置情報をコントローラに
渡す。するとコントローラは,対象物の位置までハンドをどのように動かせばよいかを計算して,動作指令を,
1.2 メカトロニクスの基本要素
3
ኅ㔚↥ᬺ
㊀㔚↥ᬺ
ᖱႎㅢା↥ᬺ
↥ᬺᯏ᪾↥ᬺ
ࡠࡏ࠶࠻↥ᬺ
⥶ⓨቝቮ↥ᬺ
ᛛ
ⴚ
ߩ
⛔
ว
Ⲣ
ว
⥄േゞ↥ᬺ
ࠛࡀ࡞ࠡⅣႺ↥ᬺ
ᑪ⸳ᧁ↥ᬺ
ක≮↥ᬺ
ἳỽἚἿ
ἝἁἋ
ᯏ᪾
㔚᳇
ᖱႎ
㔚ሶ
ᓮ
ㅢା
図 1.2: エレクトロニクスの基礎と応用
ロボットアームに指令する。すると指令値に基づきアクチュエータであるモータは回転を行い,回転に応じて
アームが動くメカ機構を介して,ハンドが対象物に近づいて行く。この時々刻々と変化する対象物とハンドの
位置関係を視覚センサで監視し,その位置誤差をフィードバックしながら正確に把持を行うシステムとなる。
メカトロニクスの基本要素
1. コントローラ (controller): センサなどからの情報に基づき,システム全体を制御する。上記の例で
は,与えられた目標量と,センサからの制御量を比較し,目標量となるように制御指令をだすものとな
る。コンピュータ,組込式マイクロコンピュータ等が主要構成要素である。また,情報伝達機能として,
コントローラとセンサ等の各種機器との通信も重要である。これら制御機器,通信機器は,主にアナロ
グ回路,ディジタル回路等により構成される。
2. アクチュエータ (actuator): 力・動作を発生するもの。上記の例では,コントローラからの指令を受
け,力・動きを発生するもの。電源などのエネルギー発生源から,制御指令に基づきパワーを回転,並
進などの動きに変換するものである。直流 (DC) モータ,交流 (AC) モータ,ステッピングモータ,油
圧シリンダなどがこれに相当する。電気モータは電源からの電力を基にモータを駆動する駆動ユニット
を必要とし,これはパワーエレクトロニク回路により構成される。
3. 機構 (mechanism): アクチュエータの動きを動作に変換するメカニズム。アクチュエータの回転,
並進運動を機構を通して目的の動作を行わせる仕組み。リンク機構,カム機構,減速機機構,軸受け,
構造材等を組み合わせたメカニズム等から構成される。
4. センサ (sensor): 外界および機器の内部状態などを計測するもの。 上記の例では,機構の動作,状態
を観測する視覚センサ,把持を検出する触覚センサなど。この他,位置,角度,速度,加速度,力,温
度などを検出するものががある。
1.3 メカトロニクスの特徴
⋡
ᮡ
㊂
4
ࠦࡦ࠻
ࡠ
ࠕࠢ࠴ࡘ
ࠛ࠲
ࠕ࠽ࡠࠣ࿁〝
࠺ࠫ࠲࡞࿁〝
ࠦࡦࡇࡘ࠲
㔚᳇ࡕ࠲
ᴤࡕ࠲
ࡔࠞ࠾࠭ࡓ
ࡦࠢᯏ᭴
╬ߩࡔࠞ࠾࠭ࡓ
ᓮ
㊂
ࡦࠨ
⟎㧘ⷺᐲ㧘ㅦᐲ㧘ടㅦᐲࡦࠨ
ജࡦࠨ
᷷ᐲࡦࠨ╬
図 1.3: メカトロニクスの構成要素とシステム構成例
1.3 メカトロニクスの特徴
メカトロニクスとは,機械技術と電気・電子技術を統合・融合する機械のシステム化技術である。これに
よって,より賢く,信頼性が高く,また小型・軽量なシステムを安価に実現できる。
1. 知的システム: より賢い機械システム。近年では,人間の活動状態によって室内環境を調整するエア
コン,洗濯物の種類量によって洗い方を制御する洗濯機,状況に応じたエンジン制御で省エネ等を行う
自動車など,機械とコンピュータ等の情報技術と組み合わせることにより機械が状況に応じて,自律的
に適切な動作を行うシステムが実現している。
2. 高信頼性: より信頼性の高い機械システム。例えば,昔のプリンタはメカ機構のみで印字動作を行っ
ていた。この場合,たくさんのリンク機構,カム機構などを組み合わせていた。このため,装置は重く,
大型で,また機構のトラブルも多く,保守も大変であった。しかしながら近年のプリンタは,信頼性も
高く,小型軽量である。これは,印字ヘッドを移動機構に取り付けたシンプルな機構を,小型モータと
制御システムを用いて高速高精度に制御することで,シンプルなシステムとして実現できたためである。
このように,シンプルな機構と,電気・電子技術と制御技術を統合することで,高信頼性のシステムを
小型・安価に構成することができる。
3. 小型・軽量: より小型で軽い機械システム。メカ機構と電気・電子技術および情報技術を用いること
で,それぞれの特徴を生かしたシンプルな構成とすることが可能となり,小型・軽量なシステムを実現
できる。
4. 安価: より安い価格で提供できる機械システム。上記のように,部品点数を劇的に低減することが可
能となり,また機構もシンプルになるため製造も簡単になる。これらの理由から,より安価な製品の提
供が可能となる。
本講義では,メカトロニクスの基礎要素であるエレクトロニクス,センサ,アクチュエータ,コンピュータ,
について動作原理,基本構造などについて解説を行い,それらの基本的な事項について理解することを目標と
する。
1.4 我が国の経済を支えるメカトロニクス
1.4 我が国の経済を支えるメカトロニクス
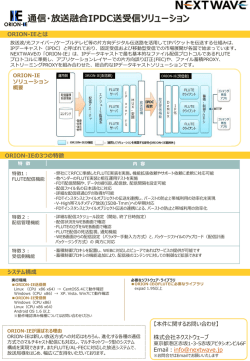
我国産業の優位性は,ものつくり技術の優位性にあると言われている。特に機械技術と電子技術との統合技
術であるメカトロニクス技術の卓越性は、我国製品の世界市場でのリードは 20 世紀後半の我国の発展を支え
ていた。このメカトロニクス製品といわれるものは,ロボットを初めとして,エンジン制御や自動運転に代表
される自動車のインテリジェント化,洗濯機・冷蔵庫・VTRなどの家電製品,NCフライス・放電加工機など
の加工機,半導体製造装置,プリンタや外部記憶装置などのコンピュータ周辺機器,デジタル通信,携帯電話
などの情報機器,空調や自動ドアなどの建物環境制御装置などなどあらゆる分野に渡っている。メカトロニク
ス産業としては,電気機械工業,情報通信工業,および自動車などの輸送機械工業がある。2002 年のデータで
あるが,これらメカトロニクス産業は,全産業技術輸出額の46%を占め,75兆円の外貨を稼ぎだしている。
我が国は,諸外国から石油などの資源,小麦・肉などの食料品を輸入しなければならない。メカトロニクス
は,我が国を支える重要な技術である。
図 1.4: メカトロニクスと産業別技術輸出額
5
第I部
A:電気電子要素技術
7
第2章
アナログ回路 (受動素子)
アナログ回路は, エレクトロニクスの基礎であり,電気・電子回路の基本をなす部分である。電気回路で取
り扱う信号には大きく分けてアナログ信号とディジタル信号がある。アナログとは連続した値を取る連続量の
ことを意味し,デジタルとはとびとびの値を取る離散量を意味する。
我々が,メカトロニクスで取り扱う,長さ,重さ,力,電圧,電流などの物理量は連続した値をとる量である。
例えば温度は,連続した値をとる物理量であり,水銀の熱膨張の割合で温度を計測する水銀温度計ならば,温
度と目盛りの変化は比例するから連続的なアナログ量として計測できる。しかし,デジタル温度計で計測した
値は,小数点一桁まで表示する温度計ならば 36.5,37.8 等のように離散的なディジタル量として計測される。
また,コンピュータはデジタル量を処理するから,センサからの値をデジタル量とすると取扱いが楽になる。
このように,メカトロニクスにおけるアナログ量,ディジタル量の違いは,その物理量によって決まるもの
でなく,多くはその計測方式によって違うものであるといえる。
1. アナログ回路:連続した電気信号(電圧・電流)の処理を行う回路。
2. デジタル回路:離散的 (0/1) な電気信号(主に電圧)の処理を行う回路。例えば”0”を 0Volt,”1”を
5Volt として,2つの電圧レベルを扱う回路。
ここではすべての電気・電子回路の基本となるアナログ回路について述べる。アナログ回路の構成要素は,
大別すると,抵抗器やコンデンサ,コイルのように,印加された電圧に応じて電流が流れる受動形の素子と,
トランジスタ,オベアンプ(演算増幅器)のように,加えられた信号とは別に外部からエネルギーの供給を受
けて動作する能動形の素子がある。
• 受動素子:抵抗,コンデンサ,コイル,トランスなど
• 能動素子:ダイオード,トランジスタ,FET,MOS, サイリスタ,演算増幅器など
i(t)
R
v(t)
i(t)
C
v(t)
図 2.1: 抵抗,コンデンサ,コイルの表記
i(t)
L
v(t)
2.1 抵抗器
8
受動素子
受動素子とは,入力信号のエネルギー増幅を行わない電気回路素子であり,主要なものとして,抵抗器,コ
ンデンサ,インダクタンス(コイル) がある。図 2.1 にその記号表記を示す。本章では,この抵抗,コンデン
サ,インダクタンスについて述べる。
2.1 抵抗器
抵抗器は,式 (2.1) に示すように印加電圧 e(t) に比例して電流 i(t) が流れる素子である。抵抗値 R とは,そ
の比例定数を表す。抵抗器には多くの種類があり,精度,形状,定格,価格で使い分けている。抵抗器には,
最もよく用いられる炭素皮膜抵抗器のほかに,高精度のものとして,金属酸化物皮膜抵抗器や金属巻線抵抗器
などがある。
抵抗器は発熱体
式 (2.2) には抵抗で消費される電力 (ワット W) を示す。流す電流によって発熱があるため,定格数 (電力)
には充分注意する。さもないと発熱による破断,発火などが起こる。
抵抗器は値がばらつく
また,表示された抵抗値の精度は,ものによっては± 20%ものバラツキがある。このため,抵抗精度が問題
となる回路へ利用するときには注意が必要である。この他,抵抗値 R は,温度によって変化し,周波数に対し
てもコイルの成分(インダクタンス)等を含む。このため,実際の回路では,理想的な抵抗のみではとはいい
がたい場合がある。
抵抗の電圧と電流の関係:v(t) = Ri(t)
抵抗の発熱量 (W ):p(t) = v(t)i(t) =
i
v(t)
= Ri(t)2
R
⊒ᾲ㊂p[W]
R
v
図 2.2: 抵抗による電圧と電流の関係および発熱量
2.1.1 抵抗器の特性
以下には,抵抗の種類と選ぶ場合の参考事項について示す。
(2.1)
2
(2.2)
2.1 抵抗器
9
1. 定格電力:抵抗に流れる電流による発熱量の許容範囲のこと(次のコラム参照)。ワット数で規定する。
1/8W, 1/4W, 1/2W, 1W 等がある。利用は定格電力の 1/2 以下が望ましい。定格電力の 50∼70%以
下で利用する。
2. 抵抗温度係数:抵抗値 R は温度 T によって次式に示すように変化する。
抵抗温度係数:R(T ) = R0 {1 + α(T − T0 )}
(2.3)
ここで α を抵抗温度係数と呼ぶ。一般に抵抗温度係数は ppm/◦ C の単位で表される。温度に対して安
定した回路を作成するときに抵抗温度係数の良いものを用いる。
3. 周波数特性:抵抗器は,インダクタンスとキャパシタンスを含むことから使用する周波数に対して理想的
な抵抗ではなくなる。特に巻線抵抗はインダクタンス成分が多いため高周波には利用しない。
4. 雑音特性:抵抗は熱雑音を発生する。熱雑音とは,抵抗体内の電子の不規則な熱振動によって生じる電
気抵抗のわずかな変化である。特に低雑音が必要な場合などには熱雑音の低い抵抗を用いる。
抵抗による電圧調整と電流制限: 次の図は発光ダイーオード (LED) を点灯させる回路です。図 (a) で
は電源電圧3 V に直接 LED を接続した状態,図 (b) では直列に抵抗を挿入したものを示します。図 (a)
では電流が流れすぎ,図 (b) では適切な動作状態となります。
i
3V
i
r
1V
3V
2V
C㔚ᵹ߇ᵹࠇߔ߉
⊒శ
LED
Dㆡಾߥേ⁁ᘒ
LED は電流が流れると光る発光素子で携帯電話のボタン照明,交通用信号機,LED 照明などへ多くの機
器に利用されています。この LED では端子間電圧が 2V 程度で動作します。すると,図 (a) のように3
V を直接加えた場合には,加えた電圧と釣り合いがとれません。このため,電源から LED に電流が過剰
に流れ LED を破壊してしまうことになりかねません。
では,どうすればよいのか?このときに図 (b) のように抵抗rを直列に挿入することで,LED に対して
適切な電圧・電流となるように調整します。例えば,LED に流れる電流を 10mA とすると,LED にかか
る電圧は 2V ですから次のような式が成り立つ必要があります。
3[V ] − 0.01[A] × r[Ω] = 2[V ]
上式は,LED にかかる電圧が 2V になればよいとする式ですね。これは抵抗 r に電流が流れるとオーム
の法則により抵抗の両端に電圧が生じるため,結果として LED にかかる電圧が低くなることを表します。
上式を計算すると,r = 100[Ω] となります。
抵抗による電圧降下を狙い,電流制限も同時に実現していますね。
2.1 抵抗器
10
抵抗で消費される電力:以上で LED に加わる電圧および流れる電流を抵抗によって適切な値とすること
ができることが分かりました。しかし,大事なことが抜けています。それは抵抗のワット数です。抵抗に
電流が流れると発熱することは知っていますね。この発熱量に耐えるかどうかを知る指標が抵抗の定格
ワット数です。図 (b) の例ではその抵抗に発生するワット数は次のようになります。
P = v × i = 1[V ] × 0.01[A] = 0.01[W ]
抵抗rは 0.01[W ] の熱量を発生し続けます。即ちヒータと同じです。すると抵抗の温度がだんだん上昇
してきて燃えてしまうかもしれません。この結果,機器の故障で済めば良いですが,火災発生の原因とな
ることもあります。このようなことが起きないようにするために,抵抗のワット数があります。これは
1/8W, 1/4W, 1/2W, 1W 等があります。発生するワット数の 2 倍程度以上の定格電力(ワット数)が望
ましいとされています。今回の例では 1/8W の規格のもので大丈夫ですね。ところで r = 100[Ω] の抵抗
に 100mA の電流が流れる場合はどうでしょうか? p = ri2 = 100 × 0.12 = 1W となりますね。この場合
は,少なくとも2 W 程度の定格の抵抗器である必要があります。セメント抵抗とかほうろう抵抗ですね。
2.1.2 抵抗器の種類
以下に各種の抵抗についてその構造,特徴,用途について説明する。
1. 炭素皮膜抵抗器:カーボン抵抗器とも呼ばれる。磁器等の絶縁体上に炭素皮膜を覆って抵抗体としたも
のである。 最もよく使われる抵抗であり,安価である。但し,温度係数が大きく, 精度もバラツキがあ
る。定格電力は 1/8W, 1/4W, 1/2W が主流である。抵抗値は後述のカラーコードで示される。
2. 金属皮膜抵抗器
(a) 塗布型:磁器等の絶縁体上に金属の皮膜を覆って抵抗体としたものである。温度係数が小さく,
精度の良いものが得られる。用途としては,精度の必要な一般のアナログ回路に向いている。
(b) 薄膜型:セラミック基板に金属を蒸着し, 抵抗パターンを形成したもの。温度係数が大変小さく,
精度が高く, 雑音も少ない。このため精度の必要なアナログ回路, 微小信号回路に使われる。
3. 酸化金属皮膜抵抗器:セラミック棒に金属酸化物皮膜をつけ, これに螺旋状に溝を切り抵抗としたもの。
熱に強いので電源などの電流が大きい時に中・大電力用として使う。
4. 巻線抵抗器:セラミック棒にニクロム線などの抵抗線 を巻き付けたもの。低抵抗で大電力のものが得ら
れる。また温度係数の低いものも可能のため,
(精密用) 高安定,計測器に使われる。
5. セメント抵抗:巻線型抵抗体等をセラミック製のケースに入れ, シリコン系の樹脂で封止したもの。
不燃性のケースで覆われているので発火しにくく, 絶縁性にすぐれる。中・大電力用に用いる。
6. ほうろう抵抗:セラミック性円筒に抵抗線を巻き, その上をホウロウ 膜で覆ったもの。高温に耐え大
電力を扱う場合に用いる。
⚛⊹⤑ᛶ᛫
㊄ዻ⊹⤑ᛶ᛫
ࡔࡦ࠻ᛶ᛫
ࡔ࠲࡞ࠢ࠶࠼ᛶ᛫
図 2.3: 抵抗器の例
㓸วᛶ᛫
࠴࠶ࡊᛶ᛫
2.2 コンデンサ
11
7. 集合抵抗器:抵抗器をいくつか (4∼10 個くらい) まとめて IC のような形にしたもディジタル回路など、
同様な回路に多くの抵抗器を必要とする場合に用いる。
8. チップ抵抗器:表面実装を行うため,薄型で小型化したもの。抵抗体は炭素皮膜や金属皮膜がある。
2.1.3 抵抗値の表示(カラーコード)
図 2.4 に示すように炭素皮膜抵抗器等ではその抵抗値はカラーコードによって表示される。表に示すように
各色には数字が対応しており,各抵抗値を表すことができる。
表 2.1: 抵抗のカラー・コード
色
数字
許容差
黒
茶
赤
橙
黄
緑
青
紫
灰
白
金
銀
0
-
1
±1%
2
±2%
3
-
4
-
5
-
6
-
7
-
8
-
9
-
±5%
±10%
• 炭素皮膜抵抗:4本の色帯表示となる。例えば,赤,緑,橙,金ならば, 始めの3つの色の表す数字は
2,5,3 となり,最後の色の金は許容差,即ちその抵抗の誤差範囲を示す。
赤 (2),緑 (5),橙 (3),金 (±5%) → 25 × 103 = 25000Ω = 25kΩ で許容差 ± 5% 黄 (3),青 (6),赤 (2),金 (±5%) → 36 × 102 = 3600Ω = 3.6kΩ で許容差 ± 5% • 金属皮膜抵抗:5本の色帯表示となる。例えば,黒,赤,緑,橙,茶ならば, 始めの4つの色の表す数字
は 1,2,5,3 となり,最後の色の茶は許容差,即ちその抵抗の誤差範囲を示す。許容差を示す色帯は他の
ものより太くなっている。
黒 (1),赤 (2),緑 (5),橙 (3),茶 (±1%) → 125 × 103 = 125000Ω = 125kΩ で許容差 ± 1% 㧞ᩴߩലᢙሼ
㧝ᩴߩਸ਼ᢙ ⺋Ꮕ▸࿐
ᛶ᛫ߩ․ᕈࠍ␜ߔ
ࠞࠦ࠼
図 2.4: 抵抗器のカラーコード
2.2 コンデンサ
コンデンサの構造を図 2.5 に示す。コンデンサは,絶縁体を 2 つの電極ではさんだ構造をしている。そこに
電圧を加えると,一瞬電流が流れ,流れ込んだ電流が電荷 Q として電極間に蓄えられる。
コンデンサは電気の貯水池
コンデンサは,コンデンサ内部に電荷を蓄え,また蓄えた電荷を放出する働きがある。すなわち電流を吸収
したり放出したりする働きがある。これを次のような,水を容器に注ぐ例をもとにその働きをイメージできる。
2.2 コンデンサ
12
i
C
⛘✼
図 2.5: コンデンサ構造
「電流 → 水流」
, 「電圧 → 水位 (水圧) 」
,
「 容量 C→ 容器底面積」
,と置き換えてみよう。この場合,水の分
子が電子とすると水流が電流に相当する。この水流がある容器に注ぎこまれる場面をイメージしてほしい。こ
のとき,水流が流れ込むに従い,容器の水の水位が上がってくる。この水位に相当するのが電圧である。容器
の面積が広ければ水位の上昇も遅くなる。この容器の面積に相当するものがコンデンサの容量 C である。
q㧦ᵹ㊂
h㧦᳓
A㧦㕙Ⓧ
図 2.6: 容器への注水
コンデンサの働きとして電圧の平滑化があるが,その原理を次のように考えることができる。例えば川があ
り,川の途中に大きな貯水池があり,そこから川が流れ出ているとしよう。この場合,貯水池に流れ込む流量
が大きく変動したとしても,貯水池の容量が十分大きければ,そこから流れ出す流量は一定にすることができ
る。丁度電気回路でも同じようなことができる。電流が流れる回路の途中にコンデンサを挿入すると,電流が
脈動していても,コンデンサは電流を吸収したり放出したりすることで,その脈動成分を平均化してくれる。
これが平滑化である。逆に電流の強弱の変化で信号を伝達する場合を考えてみよう。そこへコンデンサを挿入
すると信号が平滑化して情報が消えてしまうことにもなる。但し,コンデンサの容量を小さくしていくと,そ
れに応じて電流の強弱の値も伝達されるようになる。このようにコンデンサの容量と交流の周波数との間には
いろいろ面白い現象がある。この特性を活用して各種回路に応用される。
コンデンサの基本式
これらの関係を式で表現したものが次式となる。式 2.4 は,コンデンサに蓄えられる電荷量を示す。これは
印電圧 v(t) に比例した電荷量 Q を蓄えることを示す。そして,コンデンサの容量 C とはその比例定数を表
す。この容量を表す単位はファラッド(F)が使われる。一般に利用される容量は μF (マイクロ・ファラッ
ド), とか pF (ピコ・ファラッド) の単位が多い。電流は,電荷の時間変化であるから式 2.5 に示すように表現
できる。また電荷は電流を時間積分したものであり,式 2.4 を電圧を求める式に変形すると式 2.6 のようにな
2.2 コンデンサ
13
る。このときコンデンサに蓄えられるエネルギーは,式 2.7 に示すように電圧の二乗に比例する。
コンデンサに蓄られる電荷量:Q(t) = Cv(t)
dQ(t)
dCv(t)
dv(t)
=
=C
dt
dt
dt
1 t
コンデンサに発生する電圧:v(t) =
i(t) dt
C 0
1
コンデンサに蓄えられるエネルギー:E = Cv(t)2
2
コンデンサを流れる電流:i(t) =
(2.4)
(2.5)
(2.6)
(2.7)
コンデンサに蓄えられるエネルギ E
コンデンサに蓄えられるエネルギー E は,コンデンサに流れ込む電流とその時の電圧の積, 即ち,時々
刻々に変化する 電圧 × 電流 を時間 0 から t まで足し合わせたものになります。これは次式に示すような
時間積分したものになりますね。
t
E=
t
v(i)i(t) dt =
0
v(i)
0
dQ(t)
dt = C
dt
t
v(i) dv =
0
1
1
C[v(t)2 − v(0)2 ] = Cv(t)2
2
2
通常,電圧の初期値はゼロ,v(0) = 0 としますので上式のように時刻 t での電圧の二乗に比例する値とな
ります。これは質量 m の物体が速度 v で動くときのエネルギー 12 mv 2 と同じような形式になりますね。
コンデンサの用途
コンデンサは主に次のような用途に使われる。
• バイパス (パスコン) 回路:電源ラインの電圧変動を少なくする。並びに,ノイズ成分が後続の回路へ伝
わらないようにする。
• デカップリング回路:交流を通し,直流の電流を通さないことから,直流成分をカットする
• フィルタ回路:抵抗,オペアンプ等と組み合わせて周波数フィルタを作る。また演算増幅器を用いて積
分器,微分器を作る
• その他:交流から直流に変換した時直流電圧の変動を少なくする平滑回路,共振回路,時間を計測する
タイマー回路などなど幅広い回路で利用される
式 2.5 からもわかるように直流電圧を印加した場合は一瞬しか電流が流れないことから,回路に直列に挿入し
て直流成分の遮断し高周波域を通過させる用途に用いられる。また,電圧・電流変化の平滑化を行うため,回
路に並列に挿入して,高周波ノイズの低減,電源電圧の平滑化回路や低域通過フィルタなどに利用される。
図 2.7 には,コンデンサの動作を説明用の簡単な回路を示す。始めスイッチが off で十分長い時間が経過し
たのち,on となった状態を考える。すると,抵抗 R を通して電流がコンデンサに流れ込み,徐々にコンデン
サの電圧が上昇して,電圧が電源電圧と同じとなった時点で平衡する。またスイッチが off となると,蓄積さ
れた電荷が抵抗 R を通り放出されるため,電圧がゼロとなった時点で平衡する。このときの電流 i(t) と電圧
v(t) の時間変化を図 2.7 右に示す。このようにコンデンサの電圧は,電流の流入によって変化するため,コン
デンサの電圧の変化は急激には起こらない。通常ノイズは高周波成分であるため,急激な電圧,電流の変化が
ある。例えば,回路の電源ラインとグランド間を結ぶようにコンデンサを挿入することで,電源ラインに重畳
したノイズ成分を均し,電圧を一定にする効果がある。
2.2 コンデンサ
14
swich
On
R
i(t)
i(t)
v(t)
C
Off
v(t)
swich Off
swich ON
swich Off
図 2.7: コンデンサの特性例
2.2.1 コンデンサの特性
コンデンサは対面する電極間に電荷を蓄えることでエネルギーを蓄える素子である。この電極間に挿入する
誘電体の種類によりその容量,周波数特性が変わる。誘電体として,磁器を用いたセラミックコンデンサ,雲
母を用いたマイカコンデンサ,電解酸化によって酸化アルミニウムなどの酸化被膜を形成させて,これを誘電
体とした電解コンデンサなどがある。このうちセラミックコンデンサは,高周波特性,温度特性に優れ,最も
良く用いられている。また電解コンデンサは,主に低周波領域に用いられ小型で大容量の特徴がある。この電
解コンデンサは電極に極性があるので,利用時には注意が必要がある。
1. 定格電圧:定格電圧とは電極間にかけることのできる許容電圧であり, WV (Work Volt) で表される。
この電圧はコンデンサの種類によって違う。特に電解コンデンサの耐電圧は低いので注意が必要で
ある。
2. 周波数特性:実際のコンデンサは,インダクタンス成分,抵抗成分を含み,種類によって使用できる周波
数がかなり限られる。セラミックコンデンサは,高周波特性がよく,電解コンデンサは,主に低周波領
域に限られる。
3. 使用温度:コンデンサは,高温に弱く使用する環境温度には制限がある。電解コンデンサには 85 ℃、105
℃などの記号が記載されている。これは使用温度の上限を意味する。
2.2.2 コンデンサの種類
1. セラミック(磁器)コンデンサ:誘電体をセラミックとしたもの。高周波特性が良く高周波のバイパス
(高周波成分または雑音をアースに逃がす)によく使われる。
2. フィルムコンデンサ:誘電体をポリエステル, ポリプロピレン, ポリスチレン, ポリカーボネート等の
フィルムとしたもの,電極を円筒状に巻き込んだ構造になっている。絶縁性が高い特徴がある。
3. 電解コンデンサ:ケミカルコンデンサ,ケミコンとも呼ばれる。誘電体として,電気分解によって陽極
に形成される酸化皮膜を使用するもの。特徴として,誘電体膜が薄くできるため大容量が容易である。
但し,コンデンサの電極にはプラス/マイナスの極性があり,逆電圧をかけないように注意が必要であ
る。このコンデンサは 1μF から数千 μF など比較的大きな容量が得られ,主に電源の平滑回路,低周
波バイパス(低周波成分をアースなどに逃がす)などに使わる。しかし,周波数特性が悪く高周波には
向かない。
4. マイカ・コンデンサ:誘電体としてマイカ(mica:雲母)を使用したコンデンサ。温度特性が良く,周波
数特性も優れている。高周波での回路などに使用される。また絶縁耐圧も優れいる。
2.2 コンデンサ
15
ࡒ࠶ࠢࠦࡦ࠺ࡦࠨ
Ⓧጀࡈࠖ࡞ࡓࠦࡦ࠺ࡦࠨ
㔚⸃ࠦࡦ࠺ࡦࠨ
Ⓧጀࡒ࠶ࠢ࠴࠶ࡊ
ࠦࡦ࠺ࡦࠨ
図 2.8: コンデンサの例
ᢙሼ
⸵ኈᏅ
473 K
ਸ਼ᢙ
47×10 3 =4700pF
=0.047μF
ࠦࡦ࠺ࡦࠨߩ␜
図 2.9: コンデンサの表示
2.2.3 コンデンサの表示
コンデンサの容量は3桁表示となる。最初の2桁が数字で最後の一桁が乗数となる。3桁に続く記号が有れ
ばそれは許容差である。単位は pF(ピコ ファラッド) となる。
表 2.2: コンデンサ容量の許容差記号
記号
F
G
J
K
M
Z
許容差
±1%
±2%
±5%
±10%
±20%
−02%, +80%
• 例えば 105 は,
105 → 10 × 105 = 1000000pF = 1.0 × 106 × 10−12 F = 1.0 × 10−6 F = 1.0μF • 例えば 473 は,
473 → 47 × 103 = 47000pF = 4.7 × 104 × 10−12 F = 4.7 × 10−8 F = 0.047μF 2.3 コイル
16
コンデンサの劣化:電気機器の故障ではコンデンサの劣化を疑っては?
電解コンデンサは容量の大きなものが作れるため,大容量が必要な電源の平滑回路などで良く利用され
ます。但し,この電解コンデンサは寿命があります。電解コンデンサの中には電解液が入っており、周り
をアルミケースで囲い、端子部をゴム膜で蓋をしています。劣化の理由は中の電解液がゴム膜より漏れて
蒸発するためです。この電解液が減少することで電解コンデンサの電気特性が変わってしまいます。ま
た,液漏れにより周辺の電子回路を腐食させて壊してしまう問題があり,やっかいです。
電解コンデンサの寿命は,使用温度やリップル電流によって大きく変化します。電解コンデンサには 85
℃、105 ℃などの記号が記載されていますが,これは使用温度の上限を意味しています。通常品では毎日
8 時間利用して周囲温度 40 度のときに 15 年程度?だそうです。意外と短いかのですね。また,電解コン
デンサは内部に電解液を含んでいるため,高温荷環境下での圧力上昇による膨張や液漏れ、破裂などが起
こる場合があります。我が研究室では 2001 年から 2002 年にかけて次々と PC が故障する事件が発生し
ました。悲惨なことに,卒業研究論文を締切 1 週間前にダウンした PC がありました。ディスクセーブが
不十分だったこともあり学生君は泣いていました。この PC はある特定の中小メーカから購入したもの
で,その故障の原因はマザーボードに搭載された電解コンデンサの不良(膨張や液漏れ,破裂)によるも
のでした。この問題となった電解コンデンサは,T 国製のもので,電解コンデンサに利用した電解液に問
題があったためのようです。
• 教訓:電子機器の故障ではコンデンサの劣化を疑ってみる。また PC のハードディスクの保存はマ
メに行うこと。
2.3 コイル
コイル (coil) は,導線を巻いたものでインダクタ (inductor) ともいわれる。コイルは,流れる電流によりコ
イル周囲に磁界を発生しエネルギーを貯める。
電流は急には止まれない
ちょうどコンデンサが,電荷による電界でエネルギーを蓄えると同じようなものである。コンデンサは,電
圧の急激な変化が困難なように,コイルは電流の急激な変化が困難である。
i(t)
e(t)
v(t)
Φ(t)
図 2.10: コンデンサの例
コイルは,導線をコイル状に巻いたもので,電流を流すことで磁束 Φ を生じ,電磁場としてエネルギーを空
間中に蓄える。
2.3 コイル
17
コイルに外部電源をから電圧を加え電流を流すと,電流に比例した磁束 Φ が発生する。電流の増加に伴い,
磁束が変化すると,その磁束がコイル導線を横切り,電流の変化を妨げるようにコイル両端に電圧が誘導され
る。磁束 Φ は電流に比例し,誘導される電圧 (自己誘導電圧) は,磁束 Φ の時間変化に比例する。式 2.9 にそ
の関係を示す。その比例関係を表す L は,インダクタンス L と呼ばれる。インダクタンスは H(ヘンリー) を
単位とする。電流を電圧の関数で記述すると,式 2.10 となる。式からもわかるように電流は電圧の時間積分に
比例する。
Φ(t) = Li(t)
(2.8)
di(t)
dΦ(t)
=L
dt
dt
1 t
e(t) dt
i(t) =
L 0
1
E(t) = Li(t)2
2
(2.9)
e(t) =
(2.10)
(2.11)
コイルに蓄えられるエネルギーは,式 2.11 に示すように電流の二乗に比例する。
コイルに蓄えられるエネルギ E
コイルに蓄えられるエネルギー E は,コイルに流れ込む電流とその時の電圧の積, 即ち,時々刻々に変化
する 電圧 × 電流 を時間 0 から t まで足し合わせたものになります。これは次式に示すような時間積分し
たものになりますね。
t
E=
t
v(t)i(t) dt =
0
0
dΦ(t)
i(t)
dt = L
dt
t
i(t) di =
0
1
1
L[i(t)2 − i(0)2 ] = Li(t)2
2
2
通常,電流の初期値はゼロ,i(0) = 0 としますので上式のように時刻 t での電圧の二乗に比例する値とな
ります。このようにコンデンサと同じような形式となることがわかります。但し,電圧→電流,C→Lと
なります。
コイルの用途
コイルは主に次のような用途に使われる。
• フィルタ回路:コイルとコンデンサなどを組み合わせることで、各種周波数フィルタ回路を構成する
• 共振回路:コイルとコンデンサなどを組み合わせることで、特定の周波数の信号だけを取り出す共振回
路を構成する
• ノイズ除去:高周波電流成分が伝わりにくいことから,ノイズ成分が後続の回路へ伝わらないように
する。
• 電源の平滑回路
コイルは,電流の変化を少なくさせようとする性質がある。このため電源の平滑回路に使われる。交流を直
流に変換した際の細かな電流変化 (リプッル) をコイルの働きで平滑化する。また回路基板の電源ラインに直
列に挿入して電源ラインから入り込むノイズの低減に用いられる。また,コイルとコンデンサを組み合わせ共
振現象を用いた周波数選択を行わせる。ラジオ等の放送局を選択するチューナはこの性質を用いている。この
他,2 つのコイルを近づけ相互誘導作用を用いたトランスへの応用がある。トランスは,電力をほぼ保ち,電
圧(電流)レベルの変換を行うために使われる。
2.4 受動素子とエネルギ
18
2.3.1 コイルの種類
コイルは大別して,空芯コイル, 圧粉磁芯入りコイル, 鉄心入りコイルに分類される。コイルの内側に磁性体
を挿入することで,インダクタンスを大きくすると同時に漏れ磁束を抑える効果がある。高周波で利用する場
合には磁性体としてフェライトなどが用いられる。
࠻ࡠࠗ࠳࡞ࠦࠗ࡞
ࠗࡦ࠳ࠢ࠲
ࠕࡦ࠹࠽ࠦࠗ࡞
図 2.11: コイルの例
電圧と電流,主と従の関係はある?
抵抗の説明で,「電圧を加えると電流が流れる」との説明をしました。これは原因が電圧で,結果が電流
のような記述です。しかし,電圧と電流にこのような主と従の関係はありません!電流が流れると電圧
が発生するといった説明も正しい。この場合,原因が電流で,結果が電圧です。我々は,ランプに乾電池
を接続するとランプが点灯し,この乾電池を直列につなぐと電圧が増加し,ランプが明るくなりますね,
といった電気の話を乾電池から学習します。乾電池は電圧が 1.5V と決まっており,電圧が電気現象の主
役のように教育されてきました。よって,電流から電気回路を発想することは,始めの内難しいです。ま
た,一定の電流を供給する電流源もあります。この場合,ランプに流す電流とランプの明るさが電流の関
係から説明されるかもしれません。
電圧と電流は対等な立場です。電圧は,要素に加わる差の量である位差量,電流は要素を通過する量であ
る流通量です。
2.4 受動素子とエネルギ
コンデンサとコイルには,それぞれ式 2.7,式 2.11 で示すようにエネルギを保存する。コンデンサの場合,
両電極間電圧の二乗に比例する。このことはコンデンサへのエネルギの注入があって始めて電圧が変化するこ
とになる。すなわち急激な電圧の変化は起こりにくいことを意味する。急激な電圧変化として,例えばコンデ
ンサの両極をスイッチで開閉できる状態にして,充電したコンデンサをスイッチを閉としショートする場合を
想定してみる。すると過大な電流がスイッチに流れ,スイッチ回路を損傷させることもある。
同様な事はコイルにも起こる。コイルに蓄えられるエネルギは,コイルに流れる電流の二乗に比例する。この
ことは,急激な電流の変化は起こりにくいことを意味する。急激な電流変化として,例えばコイルにスイッチ
を介して電流を流し,電流が流れている状態で,スイッチを開とする。すると過大な電圧がスイッチの端子
(コンタクト)間に発生し,スイッチ回路を損傷させることもある。
問題:コンデンサに A sin ωt の電圧を加えた時に流れる電流 i を求め,電力 p(t) = v(t)i(t) を求めよ。時間
によってどのように変化するか。また一周期での時間平均を取るとどうなるか計算せよ。
2.4 受動素子とエネルギ
19
受動素子:抵抗,コンデンサ,コイルのまとめ
• 抵抗は 電気回路で,
「電流の制限」
,抵抗による電圧降下により適切な「電圧調整」などに用いら
れる。但し,電流が流れると熱が発生するため,発熱に耐える定格の抵抗素子を使う!
• コンデンサは,電荷を溜めこむ貯蔵庫のようなものである。電流が流れ込むと電荷がたまり,コ
ンデンサの電圧が高くなる。コンデンサに加わる電圧が低くなると,電荷(電流)を放出する。ま
た,貯まった電荷により電圧が決まるので,電圧は急には変化できない。この他,電解コンデンサ
では,耐電圧,経年変化に注意すること。
• コイルは,電流が流れると磁界を発生することでエネルギーを溜めこむ素子である。このことは
急激な電流の変化は困難なことを示し,コイルに流れる電流を一定にしようとする。例えば,電流
が増加するとコイル両端電圧が電流の増加を阻むように高くなり,逆に電流が低下すると電流を増
やす方向に電圧が増加する。
コンデンサとコイルは,どちらもエネルギーの蓄積と放出を行い,コンデンサは電圧を,またコ
イルは電流をできるだけ一定とする働きがあります。また,コンデンサとコイルは,電圧と電流
を入れ替えると双子のような動作をします。これはその基礎方程式をみてみれば,電圧 v と電流
i を丁度入れ替えたような式になっていることからも予想がつきます。このようなことを双対性
(duality) と呼び,電気回路では有名な関係です。
20
第3章
アナログ回路 (能動素子)
能動素子は,パワー源からエネルギーを取り出し,入力に加えた電力よりも大きい電力を出力から取出すこ
とができる。増幅器はその例である。アナログ形の能動素子にはトランジスタ,FET などがある。またトラ
ンジスタや抵抗を集積した演算増幅器(operational amplifier;オペアンプ)が能動素子としてよく使われる。
これは増幅,レベル比較,微分,積分など,外部に適当な回路を付加することによりさまざまなアナログ演算
を手軽に行うことができる特徴があるためである。このオペアンプについては章を改めて説明する。ここでは
トランジスタの基本である半導体について説明し,その利用としてのダイオードおよびトランジスタの動作原
理と特性を述べる。また近年,省エネなどで重要になってきた電力制御用の素子である,サイリスタ等につい
ても述べる。
3.1 半導体
半導体とは絶縁体と導体の中間の電気的性質を示す固体物質で,比抵抗が 10−3 ∼105 Ω cm 程度のものを
さす。
電気を運ぶもの
銅などの金属は電気を通します。それは電気を運ぶものが金属の中にあるからです。電流とは,電子の動
きです。電気が流れるとは,即ち自由に動ける電子があることを意味します。金属の中には,図に示すよ
うに自由に動ける電子があります。これを自由電子といいます。この自由電子があるために金属は電気を
通すのです。
⥄↱㔚ሶ
㊄ዻේሶ
࿕ቯߐࠇߚ
㔚ሶ
ዉޓ
⛘✼
導体とはこの自由電子の数が多いものです。しかし,ガラス,陶器などの絶縁体ではこの自由電子があり
ません。だから電流が流れないのです。では,半導体とは何でしょうか?半導体とは,この電気を運ぶ自
由電子(もしくは電子の抜けた穴)の数が,導体と絶縁体の中間にあるものをさします。
以下には,半導体について述べる。
3.1 半導体
21
n 型,p 型ってなに
代表的な半導体は IV 族原子であるシリコン,ゲルマニウムである。電気抵抗とは電流の通り難さを表す。
すなわち電子の移動が容易であれば電気抵抗が少なく,困難であれば電気抵抗が高い。図 3.1 に Si 原子の軌道
上の電子の様子を示す。最外郭の電子軌道には最大 8 個の電子が入れるが,Si 原子では 4 個の電子となる。こ
の Si が結晶を作る場合,図 3.2(1) に示すように,隣同士の Si 原子が最外郭電子を4個づつ共有することで結
合する.つまり電子のやり取りで Si 原子が結合することになる。この状態では,電流の担い手である自由に動
ける電子が非常に少ない状態であり,当然電気的抵抗も高くなる.このように,純粋な半導体は電気抵抗が高
く電気をよく通さない。これは,電子が各原子間の結合に使われ電子が固定されいる状態のため,自由電子が
極端に少ないことによる。
ࠪࠦࡦේሶ
5K
ේሶ⇟ภ㧦㧝㧠
5K
㔚ሶ
ࠤࠗ⚛㧔⃯⚛⚛⎜ޔ㧘ࠪ
ࠦࡦ㧕ߦᦨ߽ᄙߊ
߹ࠇࠆర⚛ߩ߭ߣߟ
図 3.1: Si 原子の軌道上の電子
図 3.2: 半導体の種類。p型半導体とn型半導体
ここで,この Si 結晶中に微量の III 族もしくは V 族原子を拡散させると(ドーピングと呼ばれる)どのよう
になるか考えてみよう。例えば,V 族原子であるリン (P) を拡散させるとする。V 族原子では最外郭電子は 5
個ある。すると Si 結晶で,Si 原子と P 原子の結合では,P 原子の電子 1 個が余り,Si 原子,P 原子に束縛さ
れない自由な電子となる。即ち電流の担い手となることから電流が流れやすくなる。同様に,III 族原子であ
るホウ素 (B) を拡散させる.III 族原子では最外郭電子は 3 個ある。すると Si 結晶で,Si 原子と B 原子の結
合では,電子 1 個不足する。電子が不足した部分は正孔 (ホール:hole) と呼ばれ,隣の電子が次々と移り,正孔
が移動することから,あたかも正の電荷が移動することと等価なことになる。即ちこの正孔 (ホール:hole) が
電流の担い手となれることから電流が流れやすくなる。図 3.2 にその概念図を示す。
このように電気伝導は伝導帯中の電子または正孔,あるいはその両者によって行われ,その濃度が半導体の
抵抗を主に決定することになる。これら電流の担い手をキャリヤ (carrier) と呼ぶ。
3.2 ダイオード
22
1. n型半導体:キャリヤが電子である。
2. p型半導体:キャリヤが正孔 (ホール) である。
3.2 ダイオード
図 3.3 にダイオードの構造を示す。pn 接合形ダイオードは,このp形とn形の半導体を図のように接触させ
たものである。図 3.3(a) のように電圧を加えた状態を考えてみる。
順電圧
1. n 形半導体電極 (陰極) に外部からマイナス電圧を加えると,n 形半導体中の自由電子はマイナス電圧に
反発して電極と反対方向の電極側へ移動する。この状態は陰極からn形半導体電極へ電子が供給される
限り持続する。
2. p 形半導体電極 (陽極) ではプラスの電圧が加わり,正孔に対し同様のことが起こり電極 (陽極) から常
に正孔が供給される。
3. 陰極と陽極から供給された,電子と正孔は,それぞれ pn 接合部に向かい進み,接合部において結合し
電子と正孔は消滅する。
このような仕組みで電流が流れ続ける。
逆電圧
逆に図 3.3(b) のように電圧をかけると次のようになる。
1. p 形半導体中の正孔は陰極側へ移動し,n 形半導体中の電子は陽極側へと,それぞれに分離する
2. 電子,正孔のキャリアのない空乏層ができ,電流は接合面を通して定常的に流れることばない
このようにダイオードとは電圧が順方向の場合,電流が流れるが,逆方向にはほとんど流れない特性を示す。
一方の端子を陽極 (アノード), 他方を陰極 (カソード) と呼ぶ。
図 3.3: ダイオードの仕組み
3.2 ダイオード
23
図 3.4: ダイオードの例
3.2.1 ツェナーダイオード
定電圧ダイオードとも呼ばれる。順方向特性は通常のダイオードと変わらないが,逆方向電圧特性に特徴が
ある。図 3.5 に示すように逆方向バイアスをさらに増加させると,ある電圧値 V = −Vz で急激に電流が流れ
るようになる(ツェナ効果)特性を持つ。ツェナダイオードは,外部の負荷によって電流値が変化しても,そ
のダイオードに固有のツェナ電圧 Vz はほぼ一定であるので,定電圧ダイオードともよばれる。直流電源電圧
の安定化あるいは電圧制限用のリミッタ回路,また過電圧の吸収などに用いられる。
i
i
Vz
0.65~0.7V
V
V
ㅒᣇะ
࠷ࠚ࠽࠳ࠗࠝ࠼
Zener diode
㗅ᣇะ
図 3.5: ツェナダイオード
3.2.2 発光ダイオード(LED)
ダイオードの順方向に電圧を加えたときに流れる電流により発光する。 LED(Light Emitting Diode)と略
記する。順方向電流を流したとき,pn 接合部付近で,電子と正孔が再結合するときに生じるエネルギーが光と
して放射される。発光ダイオードは,速い応答速度,長寿命などの特長をもつ。 また最近,白熱電球よりエネ
ルギー効率が良いため照明器具などへの利用が進んでいる。
1. 図 3.6 に示すように電子と正孔は、異なったエネルギー帯(伝導帯と価電子帯)を流れ,PN 接合部付
近で再結合する。
2. 再結合時に、禁制帯幅(バンドギャップ)にほぼ相当するエネルギーが光として放出される。
3. 放出される光の波長は材料のバンドギャップによって決まる。バンドギャップが大きくなるにつれ,赤
外,赤,緑,青と発光色が違ってくる。
リン化ガリウム GaP を用いた緑色および赤色発光ダイオード,ヒ化ガリウム GaAs を用いた赤外発光ダイ
オード,GaN/Al2 03 , SiC/SiC を用いた青色発光ダイオードが LED の代表例である。また,一般的なシリコ
ンダイオードと比較すると発光ダイオードは順方向降下電圧が高い。品種によって変わるが,1.5∼5.5V の範
囲にある。通常の赤色・橙色・黄色・緑色などでは 2V 程度となる。また順方向電流は標準で 10mA 程度で点
灯させる。
3.2 ダイオード
24
-
+
㔚ᵹߩᵹࠇࠆᣇะ
n type
i
p type
⊒శ
ࠕࡁ࠼
㐳
વዉᏪ
㔚ሶ
శ
ౣ⚿ว
ଔ㔚ሶᏪ
ࡃࡦ࠼ࠡࡖ࠶ࡊ
㔚ᵹ㧦ㅢᏱO#⒟ᐲ
㗅ᣇะ㔚㒠ਅ㧦ㅢᏱ㧞8⒟ᐲ
ࠞ࠰࠼
⍴㧕
࿁〝ޓ
ᱜሹ
図 3.6: 発光ダイオード
3.2.3 フォトダイオード
光の検出に用いられるダイオードである。フォトダイオードに図 3.7 に示すように逆バイアス電圧を加え,
光を当てると電流が流れる。通常,逆バイアス電圧を加えると電子,正孔がダイオードの両極に集まり,接合
部近傍にはキャリアが存在しない空乏層ができる。このため電気が流れない。しかしながら光が当たると,半
導体を結合する電子をはじき自由電子を生成する。このとき電気が飛び出た後が正孔となる。すなわち光のエ
ネルギーにより電子と正孔の対が生じる。この対で生成した電子はプラス方向に流れ,正孔はマイナス方向に
流れ,LED の順方向に電流が流れることになる。
フォトダイオード,このように,光から電気を作り出す働きがある。実際太陽電池は大きなフォトダイオード
を多数並べたものである。
また,フォトダイオードに流れる電流は,光強度の増加に比例して増加するので直線性の良い光検出器とな
る。このため,CCD,コンパクトディスクプレイヤー等の光検出器に使用される。このほか,高速であるた
め、光通信システムや光制御に利用される。
i
శ
ㅒࡃࠗࠕࠬ㔚
図 3.7: フォトダイオード
3.3 トランジスタ
25
3.3 トランジスタ
トランジスタ (transistor) とは電力増幅作用をもつ半導体素子の総称である。npn または pnp 型の半導体
接合構造を持ち,半導体内の電子および正孔の移動による電流を制御することにより,増幅などの動作を行う。
1948 年ベル電話研究所で発明された。接合形および電界効果形のトランジスタが主流となっている。
3.3.1 接合形トランジス
図 3.8(a) のように n 型-p 型-n 型と半導体が組合さった構造をしている。それぞれの半導体に電極を取付け,
それぞれはエミッタ,ベース,コレクタと呼ばれる。この場合は,ベースは数μ m 程と非常に薄い。これが構
造の重要なところである。トランジスタには npn 形のほか pnp 形もある。
増幅の原理
npn 形について説明する。トランジスタが2つの独立したダイオードと異なるのは、ベースを形成している
P 型半導体が非常に薄いという点である。
1. コレクタをプラス電圧,エミッタをマイナス電圧にしても,コレクタとベース間の np 接合の部分が逆
方向電圧となり電流は流れない。
2. ここで,ベースとエミッタ間の pn 接合に対して順方向の電圧を加えると,ベースとエミッタ間に電流
が流れる。
3. このとき,エミッタからベースへ流れ込んだ電子の大多数は,ベースが十分に薄いためベースを突き抜
け,そしてベースコレクタ間の電圧に加速されコレクタへと流れる。言い方を変えれば,ベース電流 iB
を流すためには,その何倍かの電子をエミッタから供給する必要がある。すなわちエミッタ電流 iE の
ごく一部がベース電流 iB となり,ほとんどがコレクタ電流 iC として流れることになる。
4. 図 3.9 にその様子を示す。例えば,エミッタからベースに注入された電子の 100 個のうち 99 個がコレ
クタに到着した。残りの1個はベース内部で正孔と再結合して消滅する。そしてこの失われた正孔を補
給するようにベースから電子が1個流れていく。ここでエミッタに流れる電流を iE ,コレクタに流れる
電流を ic とするとこの間には式 3.1 の関係が成り立つ。
ic = αiE
(3.1)
α は電流伝達率と呼ばれ,エミッタから流れ込んだ電子がコレクタへ到達する割合を表す。例えば α = 0.99
とすると,図 3.9 に示すように,エミッタからベースへ流れ込んだ電子の 99%はコレクタに到達することにな
る。これよりベース電流とコレクタ電流の関係を求めると式 3.3 のようになる。
iE = iC + i B
α
iC =
i B = hF E i B
(1 − α)
α
hF E =
(1 − α)
(3.2)
(3.3)
(3.4)
即ち,hF E 倍の変化が起こる。この hF E は電流増幅率と呼ばれ,ベースから流れ込んだ電流がコレクタ電流
として増幅される倍率を表す。α = 0.99 とすれば hF E = 100 となる。このようにトランジスタは本質的に電
流増幅型の素子である。
3.3 トランジスタ
26
図 3.8: トランジスタの構造模式図
IB
$
'
%
IE
IC
図 3.9: トランジスタ原理図
増幅器としての働き
図 3.11 に例として npn 形トランジスタのコレクタ特性を示す。これはベース電流 IB を一定に保ちながら
コレクタ・エミッタ間の電圧 VCE を変化させた時のコレクタ電流 IC の変化を示したものである。ある一定以
上の VCE では IC がほぼ一定となる。ここで図 3.11 右に示すような回路を構成した場合を考える。コレクタ
電極には電源電圧 VC が抵抗値 RL を通して接続されており,この時のコレクタ電流を IC とするとその関係
は式 3.5 のようになる。
VC = RL IC + VCE
(3.5)
ここで式 3.5 を,縦軸を IC ,横軸を VCE とするように書き直すと
IC = −
1
1
VCE +
VC
RL
RL
(3.6)
となり図 3.11 の上で直線となる。以下にはこの回路を動作点を求めるための図式解法を示す。
1. まず,トランジスタの特性である VCE と IC との関係は,ベース電流 IB をパラメータに図 3.11 で赤線
のように表せる。IB の増加に伴い異なる曲線となる。またこの特性はトランジスタの種類毎に変わる
ものである。
3.3 トランジスタ
27
図 3.10: 各種トランジスタの例
2. 次に,トランジスタのコレクタとエミッタを接続したループ回路は,式 3.5 を満たす必要がある。これ
はキルヒフォッフの電圧則で,電流 IC と負荷抵抗 RL および電源電圧 VC から導かれる。式 3.5 は図
3.11 の青線で示す直線であり,このトランジスタ回路の動作点はこの青線で示す直線上に存在しなけれ
ばならない。この直線を負荷直線と呼ぶ。
3. よって,図 3.11 右のトランジスタ回路では,上記 2 つの関係を満足する必要がある。
4. このため,ベース電流 IB を決めると,この回路を動作点は,図 3.11 の赤線と青線の交点となる。例え
ば,IB = 2μA の時その交点は VCE = 6V となる。
5. また IB = 3μA の時その交点は VCE = 4.5V 程度となる。この例のように IB = 1μA の変化が
VCE = 1.5V 程度の変化となる
6. これはベースに接続した抵抗を Ri = 10kΩ とすると IB = 1μA の変化を起こすための電圧変化は
10mV となり,電圧の増幅度からすると 1.5/0.01 = 150 倍の電圧増幅度となる
μ
Ω
図 3.11: トランジスタ回路
スイッチング素子としての働き
トランジスタはデジタル回路の基本素子としても利用される。ここではトランジスタを ON/OFF を行うス
イッチング素子として利用できることを示す。図 3.11 で十分なベース電流 IB (図では 7 μ A 以上) を流すと,
トランジスタはコレクタ電流 IC が流れ,出力電圧は A 点,VCE 0 となる。すなわち電流を流し,電圧が
0 となるいわばスイッチが ON となった状態となる。またベース電流 IB を流さないと,コレクタ電流 IC
は流れず,出力電圧は B 点,VCE VC となる。すなわちスイッチが OFF となった状態となる。これはベー
ス電流 IB よってトランジスタをオン・オフ素子,すなわちオンの時には電流を流しかつ電圧 0 とし,オフ
3.3 トランジスタ
28
の時には電流を遮断する素子としてとして利用できることを示す。ただし,流せる電流量はトランジスタの特
性によること(この例では IB = 7 μ A に対して IC 2mA),またトランジスタの性質として電流の流す方
向は一方向であることに注意する。
3.3.2 フォトトランジスタおよびその応用素子
次にはトランジスタの原理を応用したフォトトランジスタおよびその応用素子を示す。
1)フォトトランジスタ (phototransistor):
ベース電流をリード線を用いて流す代わりに,pn 接合部に光を当てることによる光起電力によってベース
電流を制御するトランジスタである。フォトダイオードでも述べたが,半導体に光が当たると,半導体を結合
する電子をはじき自由電子を生成する。(このとき電気が飛び出た後が正孔となる)すなわち光のエネルギー
により電子と正孔の対が生じベース電流が流れることになる。このベース電流は,入力される光量に応じて増
加する。図 3.12 に,その構造と写真を示す。
IC
R
శ
IB
V
శ㔚ജ
図 3.12: フォトトランジスタ
2)フォトカップラ (photocoupler):
発光ダイオードとフォトトランジスタを対向させ,光を介して信号を伝達する素子である。入力された電気
信号を LED で光に変換し、その光で受光素子を動作させることにより信号を伝達する。図 3.12 にその構造と
写真およびピン配置図を示す。この素子の特徴は,入力(発光ダイオード側)と出力(フォトトランジスタ側)
を電気的に絶縁することが可能である。すなわち発光ダイオード側の電気回路と,フォトトランジスタ側の電
気回路とは,光による結合だけであり,電気的な接続はない。
このため,それぞれ独立した電源で駆動される二系統の回路間で絶縁を保ったままでの信号伝達に用いら
れる。
i
IC
৻ဳ
ࡄ࠶ࠤࠫ
⊒శ࠳ࠗࠝ࠼
R
శ
V
ࡈࠜ࠻࠻ࡦࠫࠬ࠲
図 3.13: フォトカップラ
3.3 トランジスタ
29
3)フォトインターラプタ (photointerrupter):
図 3.14 に示すように,発光ダイオードとフォトトランジスタをある程度離して対向させ配置させ,この間に
物体が入ると光を遮断するため,物体の検知を行う素子である。例として,車軸に取り付けた円板にスリット
を開け,円板を発光ダイオードとフォトトランジスタの間に挟むことで,円板の回転角度・速度を検出できる
センサになる。このほか物体の動きの検出,プリンタの用紙排出の検出,カメラレンズ位置検出など様々なと
ころで利用されている。
ㆤ⭁᧼
R
IC
శ
৻ဳ
ࡄ࠶ࠤࠫ
V
⊒శ࠳ࠗࠝ࠼
ࡈࠜ࠻࠻ࡦࠫࠬ࠲
図 3.14: フォトインターラプタ
3)フォトリフレクター (Photoreflector):
図 3.15 に示すように,フォトリフレクタとは,発光用の LED と受光用のフォトトランジスタとが一体と
なっている反射型のセンサである。一定の明るさで LED を光らせ,物体によって変わる反射光の光量を検出
する。このセンサを使用すると,物体までの距離の計測や物体間の境界の検出が可能である。
図 3.16 には,ロボットカーにこの素子を 2 つ装着し,ライントレースを行わせる仕組みを示す。図のよう
に白線の幅にフォトリフレクターを配置する。このフォトセンサが白線からずれると図右上に示すよう出力が
変化する。2 つのセンサ出力の差をとると,図右下のようになり白線からのずれ量・方向がわかる。この値を
ゼロにするように操舵輪を動かすように制御することで白線をトレースするロボットカーができる。
.'&
8
2JQVQ6T
8
ฃశ
⊒శ
ജ
ኻ⽎‛
ޓశߩᒝᐲߦࠃߞߡജ㧔㔚㧕߇ᄌൻߔࠆ
図 3.15: フォトリフレクター
問題:発光ダイオードとフォトトランジスタを用いて,近接覚センサを作れ。近接覚センサとは数センチ以
内に対象物が近づいてきたときにそれを検出するセンサである。
3.4 電界効果トランジスタ(field effect transistor,FET)
ࡈࠜ࠻
ࡈࠢ࠲
⊕✢
ࡈࠜ࠻
ࡈࠢ࠲㧞
/
/
x
ࡈࠜ࠻ࡦࠨ
.'&ᾖ▸࿐
ࡈࠖ࡞࠼
ᠲ⥽ゞベ
30
⊕✢
ࡈࠖ࡞࠼
ᠲ⥽↪ࡕ࠲
x
Ꮐࡦࠨജ
ࡎ࠻ࡦࠨ
x
ฝࡦࠨജ
ࡎ࠻ࡦࠨ
ផㅴ↪ࡕ࠲
x
Ꮐࡦࠨജ
ฝࡦࠨജ
⊕✢߆ࠄߩߕࠇ㊂
ޓޓޓޓޓޓޓޓ
ޓޓޓޓ
ផㅴゞベ
ᬌ▸࿐
⊕✢
図 3.16: フォトリフレクターの応用(ライトレースセンサ)
3.3.3 トランジスタ命名法
これまでは npn 型のトランジスタの構造について説明した。同様に pnp 型の構造でも同じような機能を発
揮する。ただし,npn 型と pnp 型では電圧と電流の方向が逆転する。この npn 型と pnp 型とを区別するため,
トランジスタには表 3.1 に示す命名法が決められている。
表 3.1: トランジスタ命名法
用途
PNP 型
NPN 型
高周波用
2SA ○○○
2SC ○○○
低周波用
2SB ○○○
2SD ○○○
3.4 電界効果トランジスタ(field effect transistor,FET)
電界効果トランジスタは,外部から加えた電界により,電流の通路(チャネル)の幅を変えて電流を制御
する電圧動作形の半導体増幅素子である。これには大別して接合形(junction FET)と絶縁ゲート型(MOS
形:metal oxide semiconductor)の2種類がある。
• 電界効果トランジスタ
1. 接合形 FET
2. 絶縁ゲート型 FET → MOSFET
3.4.1 接合形 FET の動作原理:ゲート電圧によるチャネルの制御
ここでは,まず接合形(junction FET)について解説する。まず,FET にも半導体の種類により n 形と p
形が存在する。図 3.17 に n 形チャネルを用いた JFET の構造を示す。FET ではキャリアの供給源をソース
(エミッタに相当),キャリアの回収端子をドレイン(コレクタに相当)という。その中間にゲート(ベースに
3.5 MOS 型トランジスタ(Metal Oxicide Semiconductor)
31
相当)を接合し,これにより,ソースからドレインに流れる電流を制御する。図では電流を担うキャリアは電
子である。
ࠥ࠻
࠰ࠬ
G
࠼ࠗࡦ
D
S
㔚ሶ
G
S
-
࠼ࠗࡦ㔚ᵹ
(a)ⓨਲጀ߇ዋߥߊવዉ〝߇ᐢ
D
S
G
-
D
+
+
n
n
G
ⓨਲጀ
G
n
-
G
-
࠼ࠗࡦ㔚ᵹ
(b)ࡃࠗࠕࠬ㔚߇Ⴧടߒ
ⓨਲጀ߇ᐢ߇ࠆ
(c)ࡃࠗࠕࠬ㔚߇ߐࠄߦჇടߒ
ⓨਲጀ߇વዉ〝ࠍ߰ߐߋ
図 3.17: FET の動作原理
図 3.17(a) で FET のソースとドレイン間に電圧が加わると,n 型半導体中のキャリア(電子)により電流が
流れる。そこに図 3.17(b) に示すようにゲートにソースからみて負電圧となるゲート電圧を加えると,ゲート
下の正孔はゲート側へ引かれ,また電子は追いやられ,ゲート直下には正孔や電子のない領域,すなわち空乏
層が形成される。空乏層は電荷の担い手が無く電流が流れない領域である。このため空乏層の拡大は,電流が
通りにくくなり,電気的抵抗値が高くなることを意味する。そして図 3.17(c) のように,さらに負電圧のゲー
ト電圧を加えると空乏層がさらに拡大し,電流の通路を塞いでしまう。この空乏層が拡大しチャネルが消失す
る状態をピンチオフという。以上のように FET では,これはゲート電圧の変化によって電流の制御が可能と
なる。また FET の場合,ゲート電圧によって素子抵抗値を制御しているともいえる。またゲートは絶縁され
た状態であるため電流はほとんど流れない。そのため入力抵抗が非常に高いのも FET 形の特徴である。
3.5 MOS 型トランジスタ(Metal Oxicide Semiconductor)
MOS 型トランジスタも,絶縁ゲート型の電界効果トランジスタである。その構造を図 3.18 に示す。半導体
の表面に酸化膜(絶縁体)を形成し,その上に金属電極を設けた構造である。MOS 型トランジスタは,金属
電極に加えた電界により,電流の通路(チャネル)の幅を変えて電流を制御する電圧動作形の半導体増幅素子
である。
3.5.1 動作原理
この例では基盤を p 型半導体として説明する。この p 型半導体に図のように n 型の領域を作り,その間に金
属電極ゲートがある。この金属電極にプラスの電圧を加えると,金属電極付近の正孔はプラスの電荷のため,
この金属電極付近から追い払われる。また金属電極のプラス電圧に引き付けられ,p型半導体中の電子が金属
電極の下に集まってくる。するとこの部分は,正孔が少なく電子が多くなり,多数キャリアは電子となり,こ
の部分はn型半導体となってしまった。
なぜ p 型半導体の中から電子が出てくるのか不思議かもしれない。そもそもp型半導体とは多数キャリアが
正孔であることを意味し,少数キャリアである電子も存在するものなのである。今回この少数キャリアの電子
がゲートのプラス電極で集められて,かつ正孔は遠ざけられ,結果として電子の方が多い状態になり,p 型か
ら n 型へ変わってしまった訳である。すると,この部分はソース電極側とドレイン電極側の n 型半導体をつ
3.6 整流素子
32
VSD
VGS
㊄ዻ
S
n
G
VSD
VGS
⛘✼
㧔㉄ൻ⤑㧕
࠼ࠗࡦ㔚ᵹ
S
D
n
G
n
D
n
p
p
࠴ࡖࡀ࡞
࠴ࡖࡀ࡞
ᱜሹ
Cࠣ࠶࠼ਅߩᱜሹ߇ㅊ߿ࠄࠇ⥄↱
㔚ሶ߇㓸߹ࠅ࠴ࡖࡀ࡞ࠍᒻᚑߔࠆ
㔚ሶ
Dࠣ࠶࠼㔚߇࠴ࡖࡀ࡞߇ᄢ
図 3.18: MOS の動作原理
なぐ,n 型半導体領域となり,両電極間が全て n 型半導体となり電流が流れることになる。この部分をチャネ
ル (channel) と呼ぶ。このチャネル領域は,その原理からしてゲート電圧によってチャネル幅が変わることに
なり,結果として電流を制御できることになる。図 3.19 にある n チャネル型 MOS のドレインソース間電圧
VDS とドレイン電流 ID のソース・ゲート間電圧 VSG による変化のようすを示す。VSG によってトランジス
タと同様に流れる電流 ID を制御できることがわかる。以下にその動作原理を箇条書きで示す。
1. 金属電極にプラス電圧を印加すると,電極下の正孔が遠ざけられ,電子が引きつけられる。
2. この結果,金属電極下の多数キャリアが電子となり,その部分が p 型半導体から n 型半導体に変わる
3. すると,MOS のドレイン(D) とソース (S) 間が n 型半導体としてつながり,電気が通るようになる
4. また,ゲート電圧を増加すると,チャネル幅が拡大する
5. チャネルの拡大の結果,電気的抵抗値は低下する
6. すなわち,ゲート電圧により MOS の電気的抵抗値を制御できる
3.5.2 トランジスタと電界効果トランジスタの違い
トランジスタと電界効果トランジスタの違いとしては,電流制御型か電圧制御型かの違いがある。
• トランジスタ:微弱電流によって素子に流れる電流を制御する。即ち,ベース電流 (Ib ) によって,コ
レクタ電流 (IC ) を制御する。キャリアとして電子と正孔の両方が関与するのでバイポーラトランジス
タとも呼ばれる
• 電界効果型トランジスタ:微小電圧によって素子に流れる電流を制御する。即ち,ゲート電圧 (VSG ) に
よって,ドレイン電流 (ID ) を制御する。キャリアとして電子もしくは正孔の片方のみが関与するので
ユニポーラトランジスタとも呼ばれる。
MOS 型集積回路は製作工程数が少く,高密度に集積できるので,経済性においてすぐれ,大規模集積回路や
集積回路記憶装置 (IC メモリ)に広く用いられている。
3.6 整流素子
整流素子とは,交流電力から直流電力に変換するなど,電力変換に用いられる素子である。基本的動作は,
電流を一方方向にのみ流すダイオードと同じである。但し,大電流,高電圧に耐えるもの,電流の ON/OFF
3.6 整流素子
33
100
2.5
0࠴ࡖࡀ࡞/15ᒻ
ޓ55/-6'
࠼ࠗࡦ㔚ᵹޓ+&=O#?
2.0
៊ࡦࠗ࠼ޓᄬO#
ᦨᄢ
80
1.9
60
1.8
1.7
40
1.6
20
VGS=1.4V
0
0
2
4
6
8
10
࠼ࠗࡦ㨯࠰ࠬ㑆㔚ޓ8&5=8?
図 3.19: ドレインソース間電圧とドレイン電流特性の例(n チャネル型 MOS)
を外部から制御できるものがある点が違いである。日本の西と東では周波数が 60Hz と 50Hz と異なり,需要
のバランスによって融通しあうばあい,この周波数を変換する必要がある。このような巨大電力の制御から,
各種家庭電気製品のモータ制御,調光装置などの大電力を扱うスイッチング素子として利用される。また近年
は電気自動車のモータ制御などにも利用される。
この整流素子には,代表的なものとしてサイリスタがある。その他にはトライアック,GTO サイリスタ,ダ
イアック等がある。本節ではこの中で代表的な整流素子である,サイリスタとトライアックについて説明する。
3.6.1 サイリスタ(Silicon Controlled Rectifier )
サイリスタは大電力用のスイッチング素子である。サイリスタはダイオードと同様の一方方向にのみ電流を
流す素子である。ダイオードと違うところはスイッチング機能を行わせるためのゲートがある。
ࠕࡁ࠼
#
㔚
ᵹ
A
10⁁ᘒ
p
ࠥ࠻
)
+)ᄢφ㧜
n
p
G
ࡉࠢࠝࡃ㔚
ㅒ㒠ફ㔚
n
ㅒ㒖ᱛ⁁ᘒ
ࠞ࠰࠼
-
Cၮᧄ᭴ㅧ
㗅㒖ᱛ⁁ᘒ
㔚
K
D࿑⸥ภ
E㔚㔚ᵹ․ᕈ
図 3.20: サイリスタの基本構造と記号
サイリスタの構造は,図 3.20 に示す。P 型半導体と N 型半導体を PNPN という 4 層の構造としたもので
ある。このようにすると基本的にはダイオードと同じ性質を持つが,電流が流れ始めるタイミングをゲートで
制御できる。サイリスタは電流を阻止する OFF 状態から,電流を流す ON 状態へ制御できる。しかし,その
逆はできない ON 機能可制御型の素子である。
• サイリスタは,OFF → ON をゲート電圧で制御可能。ON → OFF は,ゲート電圧で制御できない。
3.6 整流素子
34
図 3.21: サイリスタの例
基本特性を図 3.20(c) に示す。
逆方向電圧
ダイオードと同様に,アノードとカソード間に逆方向の電圧を加えても電流は流れない。但し,逆降伏電圧
の限度を超えると電流が流れるようになる。
順方向電圧
• アノードとカソード間に順方向の電圧を加えても,ダイオードと異なり,ゲート電流 IG を流さなけれ
ば電流は阻止状態である。
• ここで,ゲート電流 IG を与えない状態で順方向電圧を増加して行き,電圧が限界を超えるとサイリス
タは ON 状態になる。これをブレークオーバーという。
• この ON 状態に移行する順方向電圧は,ゲート電流 IG を増やすに従い低下する。即ち十分なゲート電
流を与えることで,サイリスタを OFF 状態から ON 状態に変え,阻止していた電流を流すことができ
るようになる。
ちなみに,OFF → ON 状態をターンオン (turn-on),ON → OFF 状態をターンオフ (turn-off) という。
図 3.22 にサイリスタを利用した回路例を示す。交流電源からの電圧をサイリスタを通して負荷に加えてい
る。まず順方向電圧が加わるが,電流は流れない。その状態でゲートにトリガ電圧が加わりゲート電流 IG が
流れるとるとサイリスタは ON となり電流が流れる。但し,サイリスタのスイッチング機構は一度 ON となる
とゲートの制御では OFF にはできない。OFF にするためには素子に流れる電流を保持電流より小さくする
か,素子に逆電圧を加える必要がある。図 3.22 では交流電圧が逆電圧になった時点でサイリスタは OFF とな
り電流が流れなくなる。ここで,図 3.22 で負荷を電球とする。サイリスタを ON とすると電流が流れると電
球が光る。この光度は電流量によって変化するので,ゲート電圧のタイミングで発光光量を制御することがで
きることになる。図 3.22 では,点弧角が大きくなると電流が減少に,電球は暗くなる。
サイリスタの代表的な用途としては,整流器,モータの速度制御,直流から交流へ変換するインバータ,調
光装置などがある。
1. 1 方向へ電流を流す素子である。
2. ターンオン (turn-on) には,ゲート電流 IG を必要とし,順方向電流が流れる。
3. ターンオフ (turn-off) するためには,逆電圧を加える必要がある。
3.6 整流素子
35
ࠨࠗࠬ࠲
5%4
㔚ᵹ߇ᵹࠇࠆ
ࠥ࠻
ὐᒐⷺ
⽶
⩄
ࠥ࠻ࡄ࡞ࠬ
図 3.22: サイリスタを利用した回路の動作例
3.6.2 GTO サイリスタ (Gate Turn-Off thyristor)
GTO サイリスタとは,ゲートに逆方向の電流を流すことにより、ターンオフできる機能を持たせたサイリ
スタである。
通常のサイリスタと同様,GTO サイリスタは,ゲート (G) からカソード (K) へ向けて電流を流すと,ア
ノード (A) からカソード (K) へ電流が流れ始める。サイリスタと異なるのは,A-K 間の電流の遮断方法に違
いがある。GTO サイリスタでは,A-K 間の電流を遮断する(ターンオフする)ためには,電流を流す時とは
逆に,カソード (K) からゲート (G) に向かって電流を流せばよい。GTO は,電車のモータ制御等にも利用さ
れている。但し,近年では,IGBT(Insulated Gate Bipolar Transistor) を利用する電車も増えてきたとのこ
とである。GTO サイリスタと IGBT の違として動作周波数の違いがある。動作周波数とは,1 秒間に何回の
ON、OFF が可能かを表した値のことで,GTO サイリスタの場合は数百 [Hz],IGBT の場合は数千 [Hz] 程度
である。IGBT の方が高い周波数で ON/OFF 可能である。
A
G
➅ߒนᓮࠝࡦ㔚ᵹ
#
ᐔဋࠝࡦ㔚ᵹ
#
ࡇࠢ➅ߒࠝࡈ㔚
8
K
C)61ࠨࠗࠬ࠲()$8&#
ਃ⪉ D)61ࠨࠗࠬ࠲⸥ภ
図 3.23: GTO サイリスタ例とその記号
• 問題
IGBT とは どのような素子かどの程度までの電圧,電流に耐えられるか。スイッチング周波数はどの程
度か調べる。
3.6 整流素子
36
3.6.3 トライアック(TRIAC)
トライアックとは双方向サイリスタと呼ぶ場合もある。その名の通りトライアックとはサイリスタを逆方向
に2つ並列接続したものである。図 3.22 の例では,交流波形の片側しか利用できなかったが,トライアックで
は両側を利用することが可能になる。このようにすると図 3.24 に示すように,交流電圧の流れ始めるタイミ
ングを制御することが可能になる。ライトの調光装置,扇風機の速度制御等に利用されている。図 3.25 に実際
のトライアックの写真を示す。この例のトライアックでは最大容量 40A,耐圧 600V である。
㔚ᵹ߇ᵹࠇࠆ
࠻ࠗࠕ࠶ࠢ
ࠥ࠻
⽶
⩄
ࠥ࠻ࡄ࡞ࠬ
図 3.24: トライアックの動作
⛘✼ᒻ࠻ࠗࠕ࠶ࠢ$6#$4)
ᄢኈ㊂㧠㧜㧭
⠴㧢㧜㧜㨂
図 3.25: トライアック
3.6.4 パワーエレクトロニクスへの応用例
パワーエレクトロニクス技術は,家庭用電気品,ロボット,工場の生産機械,電車,自動車,発電所など広い
分野で用いられている。上記で述べた各種整流素子はこのパワーエレクトロニクス技術での基本デバイスとし
て利用されている。日本では 50Hz 地域と 60Hz 地域とがあり,お互いに電力を融通するために周波数変換所
が設けられている。図 3.26 にはその基本構成例を示す。三相全波整流回路を基本に構成されている。例えば,
変換器で一度直流に変換した後,変換器 B で逆変換を行い交流に直すことで周波数の変換を行っている。
直流電動機の制御では電機子の電圧を制御によって回転速度等制御が可能である。大容量の直流電動器で
は,サイリスタレオナード制御機が,また小容量器ではトランジスタを用いたチョッパ制御が用いられている。
また直流電動機では,整流子などの保守が必要なため,近年交流電動機が用いられることが増えてきた。この
交流電動機では加える交流の周波数で回転速度制御を行うため,可変の周波数を作り出すインバーター回路が
使われる。この回路にもサイリスタ等が使われている。
3.6 整流素子
37
ᄌ឵ེ #
ᄌ឵ེ $
ᄌ឵ེ $
♽⛔ #
C ᵄᢙᄌ឵ེ
/
D ࠗࡦࡃ࠲ᓮ
図 3.26: パワーエレクトロニクスへの応用例
38
第4章
演算増幅器(オペアンプ)
はじめに
圧力,温度,歪ゲージなど様々なセンサからの信号の増幅,フィルタ処理,積分,微分などのアナログ演算,
またはスピーカー,モータ駆動等を駆動するための信号の電力増幅用には,演算増幅器を用いて簡便にできる。
もちろんトランジスタ等の能動素子を用いて試作することもできるが演算増幅器を用いた方が短時間で信頼性
も高い回路が簡単に開発できる。
この演算増幅器は,直流から高周波に至るまで,良好な周波数特性をもつアナログ信号処理用の増幅器であ
る。演算増幅器は,抵抗,コンデンサ及びトランジスタ,ダイオードを組み合わせて集積化したものである。
Operational Amplifier の略称でオペアンプと呼ばれることが多い。近年はIC技術が進み,小形で高性能の
ものが安価で容易に手に入るようになり,今では電子部品の一つと考えられるまでになっている。また,演算
増幅器の増幅度は非常に高いため,適当なフィードバックを施すことにより,積分器,微分器,加減算器,あ
るいはアクティブフィルタなどを各種アナログ情報処理回路を簡単に作成することができる。本章ではこの演
算増幅器の原理と簡単な応用について述べる。
4.1 演算増幅器の基礎
オペアンプの構造を図 4.1 に示す。入力端子は,図に示すように反転端子 (Vn ) と非反転端子 (Vp ) がある。
増幅率をAとすると,線形な範囲では次のようになる。
V0 = A(Vp − Vn )
()
もちろん,V0 は電源電圧である V + ,V − を超えることは出来ない。
図 4.2 には実際の演算増幅器のパッケージとそのピン配列を示す。1パッケージに2つ,4 つ入っているも
のが多い,図では回路が2つ入っているものを示す。
4.2 オペアンプ動作の解析
まず図 4.1 にオペアンプの等価回路を示す。
1. 入力抵抗 ri :入力端子 Vp と Vn とが抵抗 ri で接続されている
2. 増幅率 A:出力 Vo は入力端子に加わった電圧差の A 倍となる
3. 出力抵抗 ro :抵抗 ro を通して出力端子に接続されていることを示す。
4.3 反転増幅器
39
図 4.1: オペアンプの表記と等価回路
図 4.2: オペアンプとパッケージピン配列
ここで ri を入力抵抗,ro を出力抵抗,A を増幅率とよぶ。オペアンプの回路動作の解析には,以下の仮定を
用いて解析すると分かり易い。
オペアンプ動作の仮定
1. 入力抵抗 ri を∞とする。実際は,数 M Ω(106 )程度である。
2. 増幅率 A を∞とする。実際は,103 から 106 程度である。
3. 出力抵抗 ro を 0 とする。実際は,数 10 Ω程度である。
この仮定(そう無理な仮定ではない)によりオペアンプを用いた回路の解析が格段と容易になる。次からは,
実例をもとにオペアンプを用いた回路解析を示す。
4.3 反転増幅器
図 4.3 に反転増幅器の回路を示す。反転増幅器とは,入力信号に対して出力の極性が反転する増幅器である。
図の右側には,入力波形に対する出力波形を示す。この回路について解析を行う。オペアンプ動作の仮定から
以下のことがいえる。
1. 入力抵抗 ri は無限大のため,オペアンプの+端子から−端子への電流の流入はゼロとみなすことができ
る。よって R1 を流れる電流は,オペアンプヘ流れ込むことなく,全て R2 を流れる。
2. オペアンプの+端子と−端子の電位差を e0 ,増幅率を A とすると出力電圧は,V0 = −Ae0 となる。す
ると,e0 = −V0 /A となり,A → ∞,即ち増幅率を∞と仮定できるため ∴ e0 → 0 となる。これは,
図の a 点が接地電位と等しくなることを示す。但しこの回路では a 点から接地には電流は流れない。こ
れを仮想接地という。
4.3 反転増幅器
40
3. 以上より,図のオペアンプの a 点は 0V となり,抵抗 R1 には次の式を満たす電流が流れる。
Vi − R1 i = 0 → i = Vi /R1
4. a 点に流れ込んだ電流は,入力抵抗 ri が∞なため,オペアンプ内部には流れ込めず,もちろんグランド
へも流れない。どうなるといえば,抵抗 R2 を経由してオペアンプの出力端子からオペアンプ内部に吸
い込まれることになる。出力端の電圧を V0 とすると,a 点は 0V であるから次の式が成り立つ。
R 2 i + V0 = 0 5. 以上の関係をまとめると次のような関係となり,出力端の電圧 V0 が求まる。
Vi − R1 i = 0 → i = Vi /R1 , R2 i + V0 = 0 ∴ V0 = −R2 /R1 Vi
上式は,増幅率がオペアンプ本来の利得Aに関係せず,外部抵抗の比のみにより定められることを意味して
いる。この結果,温度変化や電源電圧の変化などにより,オペアンプの特性がある程度変化しても,増幅器全
体の特性は安定しており,また,オペアンプの互換性も保証される。また,図 4.4 には反転増幅器の増幅率に
対する概念図を示す。入力電圧 Vi が発生すると,a 点を支点として,てこのように出力端が変化する。その倍
率は抵抗比となる様子を示している。
問題
• 入力電圧 Vi がマイナスとなった場合,電流はどのように流れ,また上記方程式はどのようになるか記
述せよ。
R2
R1
i
Vi
a
eo
-
Vo
i
+
Vo
Vi
図 4.3: 反転増幅器
i
Vi
a
i
0V
Vo
図 4.4: 反転増幅器の増幅率
Vo
R2
=Vi
R1
4.4 非反転増幅器
41
4.4 非反転増幅器
図 4.5 に非反転増幅器の回路を示す。非反転増幅器とは入力信号に対して出力の極性が反転しない増幅器で
ある。この回路について解析を行う。
1. 入力抵抗 ri は無限大のため,オペアンプの+端子から電流の流入はゼロとみなすことができる。
2. オペアンプの+端子と−端子の電位差は増幅率が無限大のため 0V となるように回路は動作する。
3. オペアンプの出力端から流れる電流 i は図の R1,R2 を通る経路以外には流れられない。このため出力
V0 は,V0 = (R1 + R2 )i となる。
4. このため出力 V0 は,V0 = (R1 + R2 )i となる。
5. オペアンプの+端子,−端子間の電圧は 0V であるから,抵抗 R1 に流れる電流 i によって発生する電
圧は入力電圧 Vi に等しくなる。即ち,Vi = R1 i となる。
6. よって,次式のように電圧利得は正となる。
Av = V0 /Vi = 1 + R2 /R1
図 4.5: 非反転増幅器回路
4.4.1 ボルテージフォロワ回路
ここで R2=0 とすると Av = 1 となる。これはボルテージフォロワ回路(ユニゲイン増幅器)とよばれるも
のである。図 4.6 に示すボルテージフォロワ回路は,入力抵抗が非常に高く,出力抵抗が十分低い,理想的な
バッファーとなる。言い方を変えれば,入力抵抗は高く,かつ出力抵抗は低くできる,インピーダンス変換器
ともいえる。図 4.7 に入力抵抗 ri と出力抵抗 ro について説明図を示す。
入力抵抗 ri :入力抵抗が十分高いことは前段の回路に影響を与えないため必要である。前段回路から電圧出
力 Vi が図 4.7 の回路に入力されると,電流 iin が前段回路から流れ出すことになる。このときの電流値は
iin = Vin /rin となる。もし前段回路が,センサ素子など給電能力ないもの,もしくは電流を流すと電圧が大き
く変動するものであった場合,iin を極力小さな値とすることが望ましい。このため,入力抵抗 ri をできるだ
け大きくすることで iin を小さな値とする。
入力抵抗が非常に高いことは,入力側から流れ込む電流が非常に少ないこと, その結果,入力側すなわち前段
の回路には電気的影響を及ぼさないことを意味する。入力抵抗が非常に高い極限として ∞ を考えれば,前段
回路にとって出力端子に何も接続されていない状態と同等であり,前段の回路に何ら電気的影響が無いのは明
らかであろう。
出力抵抗 ro :出力抵抗が十分低いことは後段の回路へ正確に電圧出力を伝達するために必要である。図 4.7 に
4.5 差動増幅器
42
示すように出力端子に負荷抵抗 RL が接続されている状態を想定する。すると,オペアンプから電流 iout が流
れだす。このとき出力抵抗 ro が存在すると,この抵抗により ro × iout の電圧効果が発生し,オペアンプ出力
端からの電圧はこの電圧降下分低下することになる。即ち,出力抵抗が高いと,後段の回路へ信号を送るとき
電流が流れるとそこで電圧降下が起きてしまい正確な電圧として信号が伝わらないこと,次段の電気回路に正
確な信号電圧を供給できることを表す。次式に出力抵抗 ro による出力電圧の誤差を示す。誤差は,理想電圧
Videal に対する誤差電圧 δV の比として示した。
iout =
A(Vp − Vn )
ro + RL
δV
ro
=
Videal
ro + RL
→
+
Vi
Vo
Vo=Vi
図 4.6: ボルテージフォロワ回路
ro iout
iin
೨
Ბ
࿁
〝
㔚㒠ਅ
Vp
ro
+
ri
Vi
+
-
-
A(Vp-Vn)
RL
Vn
図 4.7: 入力抵抗 出力抵抗の説明
4.5 差動増幅器
作動増幅器とは 2 つの入力電圧の差を増幅する回路である。図 4.8 に差動増幅器の回路を示す。
反転増幅器と非反転増幅器の回路構成を図のように並列に合成すると,それぞれの入力端子に加えた電圧の差
を増幅することができる。その回路解析は次のようにできる。オペアンプの+−端子間には電流が流れないこ
とから
Vn = (R1 + R2 )i1 + V0 , Vp = (R1 + R2 )i2
となる。またオペアンプの+−端子間の電圧差が 0 から
Vp − R1 i2 = Vn − R1 i1
となる。これらの式より,
V0 = (R1 /R2 )(Vp − Vn )
となる。
差動増幅器は、交流誘導雑音のように,各端子へ同時に作用する同相雑音(同じ位相の信号←同時間・同電圧
4.6 加算器
43
の信号)を除去するのに有効である。ここで交流誘導雑音とは,配線等がいわばアンテナの役割をして,周り
の電磁波からノイズを拾う現象である。通常,センサ等からの出力は,微小な電圧(電流)出力であり,セン
サからの配線は同じ経路を通るため,影響を受ける交流誘導雑音は同じ電圧,同じ位相となると考えられる。
ことため,差動増幅器を利用することで,同相の電気的雑音成分を低くすることが可能となる。
図 4.8: 差動増幅器
問題:
図 4.8 の差動増幅器では,オペアンプ+端子側の抵抗は R1 , R2 となっている。これを R3 , R4 とした場合,増
幅率はどのようになるか求めよ。
4.6 加算器
加算器とは 2 つ以上の入力電圧の加算を行い,加算した電圧の値を出力する回路である。
図 4.9 に加算器の回路を示す。回路構成は基本的に反転増幅器の入力部分を複数としたものである。反転増
幅器の入力端子を図のように複数個設け,それぞれ R1 , R2 , Rn の抵抗を通してオペアンプの−端子入力に加
えると加算器となる。以下のその動作原理を説明する。
まず,オペアンプの入力端子間電圧はゼロ電位となるため,a 点では+端子の電圧に等しい。即ちゼロ電位と
なる (仮想接地)。これにより,各入力端子に電圧 V1 , V2 , . . . , Vn を加えた場合,各抵抗には電流 i1 , i2 , . . . , in
が流れる。この結果,a 点での電流は, i1 + i2 + i3 · · · +in = if となり,この総和電流 if は,抵抗値 Rf を
通りオペアンプの出力端子に吸い込まれる(出力端子の電圧がマイナスとなり,電流の流れる方向は矢印の方
向となる)。以上のことから次のようになる。
1. a 点は仮想接地であり 0V であるから,各抵抗に流れる電流は次のようになる。
i1 = V1 /R1 , i2 = V2 /R2 , i3 = V3 /R3 · · · in = Vn /Rn
2. また, a 点は 0V と,出力電圧 V0 と抵抗 Rf を流れる電流 if から次の式が得られる。
Rf if + V0 = 0
3. 以上の2つの式から次式が得られる。
V0 = −Rf if = −Rf (i1 + i2 · · · +in ) = −(Rf /R1 V1 + Rf /R2 V2 · · · +Rf /Rn Vn )
上式は反転を除けば,各端子に入力された電圧に抵抗による加重 (Rf /Ri ) した値の和が,出力電圧として得
られることを意味している。このことから加算器とよばれている。この加重を全て同一の値とすると単純な加
算となる。もちろんこの回路に用いている演算増幅器の出力は,電源電圧の範囲ないである必要があり,加算
の結果この範囲を越える場合は出力はサチュレーションしてしまい加算とはならない。この点注意が必要であ
る。
4.7 積分器
44
Vn
..
.
V2
V1
Rn
R2
R1
in
Rf
i2
i1
a
if
+
Vo
図 4.9: 加算回路
問題:
(V1 + 3V2 − 2V3 − 5V4 ) のアナログ演算を行なう,加減算器を作れ.(方法1:反転増幅器と組合わせる,方法
2:差動増幅器と組み合わせる)
4.7 積分器
積分器とは,時々刻々変化する入力電圧の値を積分,すなわち加算する回路である。図 4.10 に積分器の回路
を示す。反転増幅器のフィードバック抵抗 R2 のかわりにコンデンサを用いると,積分器が得られる。その動
作原理を次に述べる。
1. 初期条件としてコンデンサには電荷がゼロで,また電圧 Vi = Vo = 0 とする
2. Vi がプラス電位となると抵抗 R を通して電流 i が流れ,コンデンサ C に流れ込み電荷 q を蓄積する
3. コソデンサ C に電荷 q が蓄積されつつある場合には,コンデンサを通過する電流 i と両端の電位差Vの
間には,次式の関係が成り立つ。
q(t)
1
V0 = −
=−
C
C
t
ı(t) dt
0
4. a 点の電圧が 0V(仮想接地) であるため,流れる電流 i は次式となる。
i(t) = Vi (t)/R
5. よって出力は次式となる
V0 (t) = −
1
C
t
0
i(t)dt = −
1
CR
t
0
Vi (t)dt
すなわちオペアンプの出力は入力の時間積分となっている。ここで RC を積分時定数とよぶ。但し,当然オ
ペアンプの電圧出力範囲は電源電圧以内であるため,積分結果がオペアンプの飽和電圧になると積分は実行出
来なくなる。このため,飽和が起こらないよう積分時定数を選ぶ必要がある。また飽和が起こった場合,コン
デンサを短絡するなどのリセットを行い,コンデンサに溜まっている電荷を逃がすことが必要である。
4.8 微分器
微分器とは,時々刻々変化する入力電圧の時間変化率,すなわち時間微分する回路である。図 4.11 に微分器
の回路を示す。反転増幅器の入力抵抗 R1 のかわりにコンデンサを用いると,微分器が得られる。その動作原
4.8 微分器
45
V
Vi
R
a
i
Vi
C
i
-
t
+
Vo
Vo
t
図 4.10: 積分回路
理を次に述べる。
1. 初期条件としてコンデンサには電荷がゼロで,また電圧 Vi = Vo = 0 とする
2. Vi がプラス電位となると電流 i が流れ,コンデンサ C に流れ込み電荷 q を蓄積する
3. コソデンサ C に電荷 q が蓄積されつつある場合には,コンデンサを通過する電流 i と両端の電位差Vの
間には,次式の関係が成り立つ。
Vi (t) =
1
C
t
i(t)dt
0
4. 電流 i と電圧 Vi との関係は上式から次のようになる。
i(t) = C
dVi (t)
dt
5. また電流 i はフィードバック抵抗 R にも流れ,出力電圧を V0 とすると次の式が成り立つ
V0 (t) + Ri(t) = 0
6. これらより次の式が得られる,
V0 (t) = −CR
dVi (t)
dt
これは,オペアンプの出力は入力電圧を時間微分したものとなっていることがわかる。(RCは微分時定数
とよぶ)
V
R
C
Vi
a
i
+
Vi
i
t
Vo
Vo
t
図 4.11: 微分器回路
4.9 リミッタ
46
4.9 リミッタ
図 4.12 にリミッタの回路を示す。電圧制限に用いる回路をリミッタという。リミッタ回路は,次段の回路へ
の過電圧を防止したり,オペアンプの出力電圧の飽和を抑える目的でも使用される。 ツェナダイオード DZ
を1個用いた最も簡単なリミッタ回路の例を図に示す。ツェナダイオードの特性が図右のように与えられるも
のとする。出力 Vo が正の場合,ツェナダイオード DZ は逆バイアスとなり電流は流れない。この時,図の基
本回路は通常の反転増幅器となる。しかし,出力 Vo が VZ より高い電圧となるとツェナダイオードの逆バイ
アス耐電圧レベルを超え導通してしまい出力 Vo が VZ より高い電圧にれない。
図 4.12 に入出力特性を示す。横軸を入力電圧 vi ,縦軸を出力電圧 vo とする。信号入力 Vi がマイナスで”a
∼b”までは,出力 Vo は VZ となる。信号入力 Vi が b 点の電圧になると,反転増幅器出力はツェナダイオード
の逆バイアス耐電圧レベルを超え,それ以上高い電圧にはなれないためである。信号入力 Vi が”b∼c”までは,
通常の反転増幅器(増幅率 −R2 /R1 )の動作を行う。信号入力 Vi が”c”以上では,反転増幅器出力はマイナス
電位となり,ツェナダイオードの順方向電位 −VZ となる。以上がリミッタの特性である。リミッタには各種
のものがあり,いろいろの特性のものが設計できる。
zener
diode
Dz
i
Vz
D1
Vz
Vo
R1
Vi
i
a
R2
+
-Vd
i
a
b
v
Vz
R2
R1
Vo
Vd
Vi
-Vd c
ജ․ᕈ
d
ㅒᣇะ 㗅ᣇะ
㔚
㔚
zener diode․ᕈ
図 4.12: リミッタ回路
4.10 ピーク値検出回路
ピーク値検出回路とは,連続して入力されるアナログ信号(図の回路では電圧)のピーク値(最大値)を検
出して,その値を保持する回路である図 4.13 にピーク値検出回路の回路を示す。回路は,2つのバッファーア
ンプ(高い入力インピーダンスを確保するため)とピーク電圧を保持するコンデンサ C から構成される。図右
のように電圧が入力されると,コンデンサ電圧より入力電圧が高い場合,ダイオードを通して電流が流れ,コ
ンデンサに入力電圧と同じ電圧になるまで電荷が蓄積される。そして入力電圧が,コンデンサに保持されてい
る電圧より,低くなると,b 点から a 点側には,ダイオオードがあるためコンデンサから電流が流れず,また
b 点側はバッファーアンプの入力側に当たり,高い入力インピーダンスのため電流が流れない。よって,コン
デンサに蓄積された電荷は保持され,コンデンサの電圧が保持されることになる。即ち入力電圧のピーク値が
保持されることになる。
但し,このままの回路ではでは,いつまでもピーク値を保持しているため,新たなピーク値を保持するため
には一度リセットを行う必要がある。そのリセットの方法はどうするか。ピーク値電圧はコンデンサに電荷が
蓄積された形式で電圧を保持している。よって保持電圧をリセットするには,この電荷をゼロにすればよい。
このためコンデンサ C と並列にスイッチを設け,スイッチを ON とすることでリセットを行う。このスイッ
4.11 サンプルホールド回路
47
チにはスイッチ素子,図 4.14 に示すようなフォトリレー素子などが利用できる。フォトリレー素子では図の
LED に電流を流すと内部の MOS 素子が ON となり電流を流すことができる。図の素子では,オン抵抗2Ω
でオン電流190mAを流すことが可能である。
-
a
b
+
Vi
V
+
Vo
b
Vi
Vo
%
a
ࡏ࡞࠹ࠫࡈࠜࡠࠕ
t
ࡏ࡞࠹ࠫࡈࠜࡠࠕ
図 4.13: ピーク値検出回路
ࠝࡦᛶ᛫㧞ǡ㧘ࠝࡦ㔚ᵹ㧝㧥㧜㨙㧭
図 4.14: フォトリレー素子
4.11 サンプルホールド回路
サンプルホールド(S & H 回路)は,時間的に変化する電圧波形をサンプル信号により,サンプル時のタイ
ミングでその時点の電圧を保持する回路である。図 4.15 にサンプルホールド回路の回路を示す。その動作原
理は,ピーク値検出回路と同様な仕組みで動作する。ピーク値検出回路との相違は,電流を一方方向に流すダ
イオードの代わりに,スッイッチ (SW) としたものである。
On/Off control
+
Va
ࡏ࡞࠹ࠫ
ࡈࠜࡠࠕ
Vi
0
-V
Vb
C
Vi
Vo
+
ࡏ࡞࠹ࠫ
ࡈࠜࡠࠕ
on
/15ࠍ↪ߒߚࠬࠗ࠶࠴
off
㔚
-
Vo
ᤨ㑆
Switch Control
-
SW
ON
OFF
図 4.15: サンプルホールド回路
以下にその動作原理を述べる。
スイッチ ON 状態:図のように電圧が入力されると,コンデンサ電圧より入力電圧が高い場合,スッイッチ
(SW) を通して電流が流れ(コンデンサ充電),コンデンサに入力電圧と同じ電圧になるまで電荷が蓄積され
4.12 パワーオペアンプ
48
る。その電圧はボルテージフォロアを通して出力電圧 Vo = Vi となる。そして入力電圧が,コンデンサに保持
されている電圧より低くなると,スッイッチ (SW) を通して,入力側にコンデンサから電流が流れ(コンデン
サ放電)
,入力電圧とコンデンサ電圧が等しくなる.その電圧はボルテージフォロアを通して出力電圧 Vo = Vi
となる。このようにスイッチ ON 状態では,入力電圧に出力電圧が追従して変化し,Vo = Vi となる。
スイッチ OFF 状態:ここでスッイッチ (SW) が OFF となると,コンデンサは入力から遮断され,コンデンサ
に蓄積された電荷は保持さる。よって電圧も保持されることになる。即ち入力電圧の値が,スッイッチ (SW)
の ON から OFF に変わるタイミングで保持され,その電圧はボルテージフォロアを通して出力電圧 Vo とな
る。このスイッチング動作は,高速で行えることが望まれる。このため,アナログスイッチ素子などがよく
利用される。図下には,このスッイッチ (SW) を ON-OFF 制御信号を示す。この例ではスッイッチ (SW) は
MOSFET を用いている.MOSFET はゲート電圧によってソース (S) とドレイン (D) 間の抵抗値を制御可能
で,ON 状態では,両方向に電流を流すことが可能である。
サンプルホールド回路は,時間とともに変化する信号を AD 変換するときによく使われる。AD 変換器は,
8 チャンネル,16 チャンネルなど多チャンネルの場合が多い。通常このような場合,ある時間のタイミングに
同期させ,全てのチャンネルのアナログ信号値を計測したい。このような場合に,多チャンネル分の S & H 回
路を設け,サンプリングタイミングで全ての入力電圧を保持することで対応できる。また,入力アナログ電圧
をデジタル値に変換するとき変換時間が必要で,もし変換中にアナログ値が変化すると変換に支障が生じる。
このため S & H 回路は電圧値を保持するので好都合でもある。
4.12 パワーオペアンプ
通常オペアンプは,大きな電圧,電流,電力を扱うものは少ない。ここで紹介するパワーオペアンプは,こ
れら大電圧,大電流および大電力用に使われるものである。図 4.16 のものは OPA541 とよばれるのもで電源
電圧± 40V で,出力電流ピーク出力 10A となっている。写真では,金属缶パッケージのものと,プラスチッ
クパッケージのものを示す。写真のよこにはそのピン配置を示している。パワーオペアンプは,大電力の制御
を行うため,発熱が多く,放熱のための仕組みが重要となる。金属缶パッケージでは金属缶全体を用いて,プ
ラスチック型ではヒートシンク(放熱器)を取り付け放熱を行えるようになっている。
パワーオペアンプの用途としては,DC モータの駆動素子,オーディオ用アンプ等へ利用できる。例えば,
DC モータの速度はモータに加える電圧を変化することで制御できる。このためパワーアンプは DC モータの
駆動素子としても利用できる。但し,この方式では,放熱分の電力は無駄になるため,主に小電力型モータで
用いられる。
㊄ዻ➧ࡄ࠶ࠤࠫ
61ࡄ࠶ࠤࠫ
ࡊࠬ࠹ࠖ࠶ࠢࡄ࠶ࠤࠫ
図 4.16: パワーオペアンプ例 (OPA541)
49
第5章
ディジタル回路
はじめに
近年のテレビなど各種家電製品,携帯電話,もちろんパソコンなどはデジタル技術なくして実現しえない。
このディジタル技術の基礎を成すのがディジタル回路である。本章では,このデジタル回路の基本的なことに
ついて述べる。
図 5.1 には携帯電話の基盤とマイコンボードの例を示す。基盤の上に黒い四角いチップが搭載されている。
これらが LSI である。LSI とは非常に多くのデジタル回路を集積化して小さなチップとしたものである。図右
は,マイコンボードで,H8(AKI-H8/3052F) と呼ばれるもので,ロボコン等で良く利用されている。マイコン
ボード中央にある黒い四角いチップが LSI の一種で CPU と呼ばれるものである。CPU(Central Processing
Unit) は,中央演算処理装置といわれ,演算処理や機器制御などを行う LSI である。これら LSI を構成する
ディジタル回路数は膨大であるが,その回路の一つ一つは簡単な回路から構成され,また基本的動作について
は単純なものが多い。以下では,これらディジタル回路について簡単に述べることとする。
図 5.1: ディジタル製品例 (携帯電話基盤とマイコン H8)
5.1 ディジタル回路
ディジタル回路とは,主に 2 進演算を電気素子で行うための回路である。このためディジタル回路では,離
,電流の「on/off」状態が使われる。我々は日常0∼9の数字
散的な二つの状態,たとえば電圧の「high/low」
を用いた 10 進法を用いて計算を行ってる。これに対して近年発展が目覚ましい電子計算機は,0/1 を用いた 2
進法を用いている。ちなみにディジタル(digital)とは英語で指をさす。指の屈伸て計数を行うように,ディ
ジタル回路では,それぞれの数値に対応させた電気量の離散的な状態を用いて,信号の定量化や処理あるいは
演算などを実行している。これは,アナログ回路に比べ,雑音や電源電圧の変動を受けにくく,使用する素子
のバラツキもほとんど問題にならないため,高信頼性の回路が構成可能なことによる
5.2 基本論理素子 (AND, OR, NOT, NAND,NOR,XOR)
50
5.1.1 論理演算
ディジタル回路の動作を理解するためには,論理演算とはどのようなものかを理解することが必要である。
論理演算とは、ブール演算とも呼ばれ、1(真 true)か 0(偽 false)かの 2 通りの入力値に対して 1 つの値を
出力する演算である。ブール代数 (Boolean algebra) とは,この真と偽の値しかとらない論理演算を定める代
数であり,George Boole (1815-1864) が創始者である。
この論理演算の基本として,論理積 (AND),論理和(OR),否定(OR) がある。例えばその演算結果は,次
のようになる。
1. 論理積 (AND):0 · 0 = 0,0 · 1 = 0,1 · 0 = 0,1 · 1 = 1
2. 論理和(OR):0 + 0 = 0,0 + 1 = 1,1 + 0 = 1,1 + 1 = 1
3. 否定(NOT): 0 → 1, 1 → 0
注)AND 演算子を ” · ” で,OR 演算子を ” + ” で,示す。
論理演算では基本的に上記の論理素子から全ての回路が構成できる。但し,実際の回路ではこれらを組み合
わせてできる次のような論理素子を基本的な論理素子として用いる。
5.2 基本論理素子 (AND, OR, NOT, NAND,NOR,XOR)
ディジタル回路では,図 5.2 に示す基本的な演算素子がある。否定を行う NOT 素子以外は,2 つの入力 x, y
に対する演算結果 f となり,その関係は表 5.1 のように表される。この表は真理値表と呼ばれ,組合せ論理回
路において,入力の可能なあらゆる組合せに対する出力を表の形に書き表わしたものである。AND,OR,NOT
回路は論理演算の基本のところで述べた。NAND は AND 素子と NOT 素子を組み合わせてもので,NOR は
同様 OR 素子と NOT 素子を組み合わせたものである。また XOR はちょっと特殊な論理演算を行い,x,y 入
力が異なった場合のみ出力で1となる。実は,実際の回路では NAND 素子のみがあれば,上記全てに基本素
子が構成できる。
図 5.2: 基本論理素子
表 5.1: 基本論理素子の真理値表
x
0
0
1
1
AND
y
0
1
0
1
f
0
0
0
1
x
0
0
1
1
OR
y
0
1
0
1
f
0
1
1
1
x
0
0
1
1
NAND
y
0
1
0
1
f
1
1
1
0
問題 XOR を NAND 素子のみを複数個用いて構成せよ。
x
0
0
1
1
NOR
y
0
1
0
1
f
1
0
0
0
x
0
0
1
1
XOR
y
0
1
0
1
f
0
1
1
0
5.3 論理素子の基本動作
51
図 5.3 には,代表的な論理素子である NAND 回路 (7400) を示す。ピン配置でもわかるように 4 素子が 1
パッケージに収納されている。
図 5.3: 基本論理素子 (SN7400) 例
TTL と CMOS:論理素子のシリーズは、7400 シリーズ (TTL),および,低消費電力型の 4000 シリー
ズ (CMOS) が有名である。これらは、事実上の業界標準(デファクトスタンダード)となっている。
TTL とは,Transistor-Transistor Logic のことで,、バイポーラトランジスタと抵抗によって構成さてい
る。TTl は消費電力が大きい難点があり,低消費電力化した 74LS シリーズがある。
CMOS とは,Complementary Metal Oxide Semiconductor のことで,相補型 MOS を用いた論理回路
である。TTL は常に電流が素子内を流れる構造になっているのに対し,CMOS では変化には電流が流
れるが定常時には電流が流れない構造となっているため低消費電力型の素子である。近年は TTL に比べ
CMOS の利用が多いようである。
5.3 論理素子の基本動作
ここでは実際の論理素子回路の機能を具体的な動作として説明する。以下では AND 回路と OR 回路につい
て述べる。
5.3.1 AND 素子基本動作例
図 5.4 にはその一例として AND 回路を示す。通常,論理素子回路の出力は電圧であり,2 レベルの電圧
(0.5V と 4V 程度)となる。これ以外の中間電圧レベルはないとする。この電圧レベルによって,2値を表す。
㔚୯
a
b
f
4V
⺰ℂ୯
high level
"1"
0.5V low level
"0"
#0&࿁〝
図 5.4: 論理素子の出力と論理値
基本論理素子は,CPU 等の論理演算処理に利用される場合を想定してみると,電気的信号が時間によって
変化する。実際には,時間的に変化する入力に対して,出力がどう変化するかを考えることが一般的であり,
また必要である。以下ではそのような観点から時間変化入力に対する出力変化について考察する。
図 5.5 には AND 素子の基本動作例を示す。x,y 入力としては図に示すような時間的に”0/1”と変化する入力
を与える。すると y=0 の時は AND 素子出力は必ず 0 となり,y=1 の時は,f = x · 1 = x となる。この関係
5.4 正論理と負論理
x
52
f =xy
y
x
(1) y=0 : f=0
y
(2) y=1 : f=x
f
#0&࿁〝
time
図 5.5: AND 論理素子の動作例 (Gate 回路)
は図 5.5 のようになる。即ち,と y=1 の時には x 入力のパルスを通し,y=0 の時は通さない,ゲート回路と
して動作しているのがわかる。図右には,y 入力によって x 入力を出力とするゲート回路の機能をスイッチ要
素で表した概念図を示す。問題ECL(Emiiter Coupled Logic) 論理素子回路のように,出力として電流の強弱
で信号を伝える方式もある。電流の強弱で伝送する場合の利点と欠点を述べよ。
5.3.2 OR 素子基本動作例
図 5.6 には OR 素子の基本動作例を示す。x,y 入力としては図に示すような時間的に”0/1”と変化する入力
を与える。OR 素子は入力の一方が 1 となれば出力は,もう片方に関わらず 1 となる。すなわち,OR 素子出
力は,f = x + 1 = 1, f = 1 + y = 1 となるため,どちらかが 1 となると,出力は必ず 1 となる。この関係は
図のようになる。例えばこの関係は,x,y からお互いに重ならないようにパルス列が入力されると,出力のパ
ルス列の個数は,x,y のパルス列の和になる。
x
y
f =x+y
x
y
14࿁〝
f
図 5.6: OR 論理素子の動作例
5.4 正論理と負論理
デジタル論理では、1 と 0 という 2 つの状態を使って信号やデータなどの情報を表現する。この場合,1 と
0 を電気的に実際にどのような状態に対応させるかについては,正論理と負論理の 2 通りの方法が考えられる。
正論理とは,電圧レベルが高い状態を 1,低い状態を 0 とする論理回路を表し,負論理はその反対の対応付け
を表す。
1. 正論理:high V olt → ”0”, low V olt → ”1”
2. 負論理:high V olt → ”1”, low V olt → ”0”
論理回路を設計するとき,人間にとって正論理の方が理解しやすい。しかしながら,正論理だけで回路を組む
ことは現実的で無かったり,無駄を生じる事がある。複雑な回路になるほど正論理と負論理を混在させた方が
都合が良い場合が多い。実際には基板の回路全体の機能は正論理であるが一部回路は負論理であったりする。
5.4 正論理と負論理
53
正論理と負論理で変わる論理素子の機能
論理素子の機能は,正論理か負論理かによって変化する。以下には,その変化する様子を示す。
まず 2 入力 1 出力の電気回路を考える。電圧のレベルは 0V と 5V の 2 つのレベルのみとする。この場
合,正論理:0V →”0”,5V →”1”,負論理:5V →”0”,0V →”1”となる。
さて,電気回路の入力 A,B に対する出力 C の関係が下図のようになっているとする。この電気回路の出
力は,図に示すように 0V,OV と入力があったとすると,出力は 0V となる回路である。この電気回路は
AND 回路であるか OR 回路であるかは,取りあえずこの段階では無視することにする。
さて,ここで高い電圧を1,低い電圧を0とする,正論理を使うか,その逆の負論理を利用するかは,論理
回路設計者の裁量に任されている。”case a”は,設計者が正論理を用いた場合を場合を示す,反対に”case
b”では,負論理を用いた場合を示す。”case a の正論理により,電圧と0/1 の関係を図下の左に示す真理
値表に直すと,AND 素子となる。同様に”case b の負論理により,電圧と0/1 の関係を図下の左に示す
真理値表に直すと,OR 素子となる。すなわち,この電気回路は,正論理で使用するか,負論理で使用す
るかによって,その論理演算素子の機能が変化する。
A B
0V 0V
0V 5V
5V 0V
5V 5V
C
A
B
㔚᳇࿁〝
C
0V
0V
0V
5V
㔚᳇࿁〝ߩജ
case a
case b
0 V: 0
5 V: 1
A
C
B
A㨯B=C
A
0
0
1
1
B
0
1
0
1
C
0
0
0
1
ᱜ⺰ℂ
#0&⺰ℂ⚛ሶ
A
1
1
0
0
B
1
0
1
0
C
1
1
1
0
⽶⺰ℂ
0 V: 1
5 V: 0
A
C
B
A+B=C
14⺰ℂ⚛ሶ
論理演算素子を用いた回路ではこのように論理値と電気的な信号値との対応付けによって機能が明らかに
異なる。このため論理回路設計を行う場合,正/負論理どちらで行うか明確にしておくことが必要であ
る。実際の論理回路では状況に応じて使い分けられている。一般的に,データ線やアドレス線などは正論
理,チップセレクトや割り込み信号などの制御用信号線は負論理で設計されていることが多い。また,イ
ンターフェースカードの入出力部は負論理を取ることが多い。これは,インターフェースカードから出る
コネクタを差し込まない場合,もしくは抜けた場合では,論理値として”0”となることが望まれる場合が
多く,コネクタが抜けた状態が電気回路では high となるため(注)high を”0”とする負論理が用いられ
る。回路図では負論理の信号の場合は,信号線の名前の上に横線を引くなどして表すことが多い。(例 sensor control)
• 注:I/O カードのコネクタが抜けた状態は外部回路と接続が離れた状態となる。このときに I/O カード側の
入出力端子回路には電流が流れず,電圧が high 状態となる回路構成を用いているため。
5.5 マルチプレクサ (multiplexor)
54
基本組合せ回路
以上の基本論理素子を組み合わせることで,多入力 1 出力,1 入力多出力,エンコーダー,デコーダーなど
の回路を作成することができる。ここではそのいくつかを紹介する。どれも基本的な回路であり,各種論理回
路で利用される。また皆さんもディジタル回路を設計する場合利用する機会も多いと思われる。またそれらの
回路のその基本動作原理は非常に単純である。
5.5 マルチプレクサ (multiplexor)
機能:多数の入力 (2n ) から選択信号によって,1入力を選択し,その信号を出力する回路である。
図 5.7 には 8 入力 1 出力のマルチプレクサを示す。選択信号 S1 , S2 , S3 の値により,0 から 7 番までの入力信
号のうち一つを出力へ繋げる。例えば,選択信号が S1 = 1, S2 = 0, S3 = 0 とすると,入力 D1 が選ばれ,そ
の入力線の信号レベルが出力される事を示している。例えば入力 D1 が”0”ならば出力 f も”0”となり,入力
D1 が”1”ならば出力 f も”1”となる。即ちあたかも入力 D1 と出力 f が接続された状態と同じになる。選択信
号により選ばれる入力の関係は図 5.7 右に示されるようになる。
D0
D1
D2
.
ജ .
.
S1 S2 S3
0 0 0
1 0 0
Q
.
.
.
.
.
.
ജ
D7
S1 S2 S3
1
Q
D0
D1
1
1
D7
ㆬᛯାภ
図 5.7: マルチプレクサ
次に,このようなマルチプレクサ回路はどのような基本論理素子の回路で構成されるかを示したのが図 5.8
である。2 入力1出力マルチプレクサで,2:1 セレクタと呼ばれる。x と y の 2 入力から,どちらか 1 入力を
選び出力する。選択は S 入力による。図 5.8 では S=0 の時には x が選択され,S=1 の時には y が選択され
る。図 5.8 右には 2:1 セレクタを基本論理素子から構成したものを示す。AND 素子が2つ,NOT 素子が1
x
D0
ജ
y
Q
D1
S
ㆬᛯାภ
x㨯S
x
f
(1)
(3)
ജ
y
x㨯S + y㨯S
(2)
S
f
y㨯S
S f
0 x
1 y
図 5.8: マルチプレクサの構成例
つ,OR 素子が1つから構成される。この構成を基にその動作を説明する。
S 入力が”0”の時,AND 素子 (1) の入力は x と S̄ になる。S = 0 → S̄ = 1 となるから AND 素子 (1) はゲー
トが開いた状態,即ちの入力 x は通れることになる。即ち AND 素子 (1) 出力は x · S̄ = x となる。この時,
AND 素子 (2) の入力にある S 入力が”0”のため,AND 素子 (2) はゲートが閉じた状態となる。即ち AND 素
5.6 デマルチプレクサ(demultiplexer)
55
子 (2) 出力は y · S = 0 となる。
同様に,S 入力が”1”の時,AND 素子 (1) 出力は x · S̄ = 0 となり,AND 素子 (2) 出力は y · S = y と
なる。よって,OR 素子 (3) の出力は,どちらから”1”入力が来ると”1”出力を出す。即ち x · S̄ + y · S
となる。よって,この回路は S 入力によって入力 x か y どちらかを選択して出力する回路となる。即ち,
S = 0 → f = x, S = 1 → f = y となる。
ちがう言い方をすると,この論理回路は S 入力によって,ゲート回路としての AND 素子((1) と (2))どち
らか一方のゲートが開き,OR 素子によって,足しあわせる回路とみることができる。
問題:4 入力 1 出力のマルチプレクサを設計しよう。この場合,4 入力の中からどれを選択するかの選択入力
は 22 = 4 より,2 本の選択線 S0 , S1 が必要になる。
5.6 デマルチプレクサ(demultiplexer)
機能:1入力を,選択信号によって多数の出力 (2n ) の中から1出力を選択し,入力信号を出力する回路で
ある。
図 5.9 には 1 入力 8 出力のデマルチプレクサを示す。選択信号 S1 , S2 , S3 の値により,入力信号を 0 から 7
番までの出力信号のうち一つに繋げる。例えば,選択信号が S1 = 1, S2 = 0, S3 = 0 とすると,出力 Q1 が
選ばれ,入力線からの信号レベルが Q1 に出力される。例えば入力が”0”ならば出力 Q1 も”0”となり,入力
が”1”ならば出力 Q1 も”1”となる。即ちあたかも入力と出力 Q1 が接続された状態と同じになる。選択信号に
より選ばれる入力の関係は図 5.7 右に示されるようになる。
ޓ ޓޓQ0
ޓ ޓޓQ1
D ޓޓQ2
ജ
S1 S2 S3
0 0 0
1 0 0
.
.
.
.
.
.
ޓޓޓQ7
S1 S2 S3
ജ
1
D
Q0
Q1
.
.
.
1
1
Q7
ㆬᛯାภ
図 5.9: デマルチプレクサ
x
ജ
Q0
a
x
(1)
D
Q1
S
ㆬᛯାภ
x㨯S
b
ജ
a
(2)
S
b
x㨯S
S
0
1
a
x
0
b
0
x
図 5.10: デマルチプレクサの構成例
次に,このようなデマルチプレクサ回路はどのような基本論理素子の回路で構成されるかを示したのが図
5.10 である。1 入力 2 出力マルチプレクサで,1:2 デマルチプレクサと呼ばれる。一つの入力を出力 a,b ど
ちらかへ繋げる。選択は S 入力による。図 5.10 では S=0 の時には a が選択され,S=1 の時には b が選択さ
れる。
回路の構成は,AND 素子が2つ,NOT 素子が1つからできている。その原理は,デマルチプレクサの方が
マルチプレクサより分かり易い。AND 素子の入力に S 入力が接続していることから,S 入力によって片方の
5.7 エンコーダ (encoder)
56
AND 素子のみのゲートが開くことは明らかであろう。
S 入力が”0”の時,AND 素子 (1) の出力は x · S̄ = x,AND 素子 (1) の出力は x · S = 0 となり,入力 x は,
AND 素子 (1) へ出力される。同様に,S 入力が”1”の時,AND 素子 (1) の出力は x · S̄ = 0,AND 素子 (1)
の出力は x · S = x となり,入力 x は,AND 素子 (2) へ出力される。
問題:1 入力 4 出力のデマルチプレクサを設計しよう。この場合,4 出力の中からどれを選択するかの選択入
力は 22 = 4 より,2 本の選択線 S0 , S1 が必要になる。
5.7 エンコーダ (encoder)
エンコードとは,データのコード化を行う処理である。ここでは,個別の配線で指示された 10 進数入力を,
4 ビットの 2 進数進数出力に変換するエンコーダを示す。図 5.11 左に入出力表を示す。10 の状態に対応した
2 進数が表となっている。”0”の場合 D0 のみ”1”,”1”の場合 D1 のみ”1”,”2”の場合 D2 のみ”1”・・,”9”
の場合 D9 のみ”1”が入力されるとする。その時,入力の 10 進数に対応した2進数コードが出力に現れるこ
とを確認されたい。要するに B0 ビットが1となるのは,1,3,5,7,9 のときであり,B1 ビットが1となるのは,
2,3,6,7 のとき,のように1となる入力に対して OR 回路を構成すればよい。エンコーダの内部を図右に示す。
Decimal
Binary
Decimal
input B3 B2 B1 B0
0 D0
0 0 0 0
1 D1
0 0 0 1
2 D2
0 0 1 0
3 D3
0 0 1 1
4 D4
0 1 0 0
5 D5
0 1 0 1
6 D6
0 1 1 0
7 D7
0 1 1 1
8 D8
1 0 0 0
9 D9
1 0 0 1
Binary
Encoder
⺰ℂᑼ
D0
D1
B0
D2
D3
D4
..
B1
B0=D1+D3+D5+D7+D9
B1=D2+D3+D6+D7
D5
D6
B2
B2=D4+D5+D6
D7
D8
D9
B3
図 5.11: デマルチプレクサの構成例
5.7.1 デコーダ (decoder)
デコードとは,エンコードの逆で,コードの解読を行う処理である。
問題:2進数入力を,10進数出力に変換するデコーダを設計せよ。
B3=D8+D9
5.8 R − S フリップフロップ
57
順序論理素子
上記では,基本論理素子について説明した。これら基本素子から様々な機能を持ったディジタル回路が構築
できることがわかると思う。さて,本節からは順序論理素子について説明を行う。順序論理素子とは,簡単に
言えば,記憶を担う素子である。この場合の記憶とは,ある時点での 0/1 信号状態を記憶できるということで
ある。つまり,その時点での入力の状態ばかりでなく,過去の履歴にも依存する回路素子のことを示す。通常,
状態を保つ素子としてフリップフロップなどがある。簡単な論理演算機能を備えた記憶素子はフリップフロッ
プ(双安定マルチハイフレータ)とよばれ,用途に応じて多くの種類のものが製品化されている。ここではそ
の中で基本的なものをいくつか示す。入出力端子にさまざまなゲート回路を接続することにより,カウンタ,
レジスタなどへ機能を拡張することが可能である。ディジタル回路としては,基本論理素子とこの順序論理素
子の2つでほとんどの回路は構成できる。その意味では,これのみを理解しておけばよいとも言える。以下で
は,フリップフロップについて説明する。
5.8 R − S フリップフロップ
フリップフロップの中で最も簡単なものは,R − S フリップフロップ(RS ラッチ)である。NAND 素子2
個を少々トリッキーに接続した回路である。機能としては,セット入力 (S) と,りセット入力 (R) により,出
力を1または0の状態にすることである。このとき重要なことは,セット,りセット入力は一瞬のパルス波形
で良く,その入力が生じたことで,ずっとその出力状態を保つこと,言い換えれば記憶することである。以下
ではその仕組みを述べる。
ここで S はセット(プリセット),R はリセット(クリア)を意味しており,Qn および Qn は,R, S に信号が
入力される前の”0”,”1”のいずれかの状態を示す。また Qn+1 は,R, S に信号が入力された後の状態を表す。
図 5.12 左の表は,S,R の 4 つの組合せ入力に対する出力の様子を示す。
• まず,S,R に何の入力信号がない場合には,出力の状態は変化しない。Qn+1 = Qn
• 次に,R(リセット) が入力されると Qn の状態が何であろうとも Qn+1 → 0 となる。
• また S(セット) が入力されると Qn の状態が何であろうとも Qn+1 → 1 となる。
• しかしながら,S(セット) と R(リセット) が同時に入力すると Qn+1 は未定となる。このため,この RS
フリップフロップは実際の回路での使用には注意が必要である。
S
(set)
S
Q
R
R
(reset)
Q
Q
S
0
0
1
1
図 5.12: R − S フリップフロップ
回路動作説明としては,次のようになる。
1. S が 0 となると Q は 1 となり,
2. Q が接続している下の NAND 素子は R が 1 であるから Q は 0 となる
3. すると Q が接続している上の NAND 素子の一方の入力が 0 となり,
R Qn+1
0 Qn
1 0
0 1
1 ?
5.9 D フリップフロップ
58
4. このため,Q 出力は 1 状態を保つ。
よって,このようにセット入力がパルス入力されると,Q 出力は安定的に 1 状態を保つことになる。同様にり
セット入力の場合は Q 出力は安定的に 1 状態を保つことになる。
問題:セット,りセット入力が同時に入力されると出力はどのようになるか。
セット,りセット信号の上バーは何の意味?
図 5.12 のセット,リセット信号には上バーが付いていますね。つまりこのような表記です S, R。これは
負論理であることを意味するのはご存知ですね。図の左の信号ラインを見てください。S 入力あること,
すなわち論理上1となる時点は,セット入力が 0V レベルになった時点を表します。
5.9 D フリップフロップ
D フリップフロップ (以降 DFF とする)は,一般的なフリップフロップである。TTL 回路では型番で 7474
のものがよく知られている。図 5.13 にパッケージとその内部配置を示す。14 ピンのパッケージに 2 つ DFF
素子が入っている。図 5.14 左に DFF の回路記号を示す。入力側に,データ入力端子 D,クロック入力端子
図 5.13: D フリップフロップ (SN7474) とパッケージ配置
CK がある。出力側には Q, Q がある。図 5.13 の DFF には PRE,CLR 端子があるがこれは後で説明する。
機能:DFF は,クロック入力の立ち上がりの時点でのデータ入力端子にあるデータを出力端子 Q に出力し,
再度クロック信号の立ち上が来るまで,その状態を保つ,即ち記憶する回路素子である。各種レジスタやラッ
チに利用される回路素子である。
図 5.14 中には,タイミングチャート(時間軸を用いて信号の変化を描いたもの)を示す。上からクロック信
号 (CK),D 入力端子電圧,Q, Q を示す。
DFF は通常,CK の立ち上がりのタイミングで,D 入力の状態(0/1) が記憶され,出力 Q に出力される。こ
のタイミングチャートでもその様子がわかると思う。また,DFF 動作を表す方法として,図右に示すような
の状態遷移で表す方法がある。この図を状態遷移図とよぶ。(D=0,CK ↑) とは,D 入力が 0 で CK が 0 から
1 に変化する瞬間を表す。図の見方は,丸で囲まれた0,1は Q の出力状態を示す。例えば,0 状態のとき,”
D=0,CK ↑”となると,0 状態から 0 状態に変化し,”D=1,CK ↑”となると,0 状態から 1 状態に変化する
ことを示している。
5.9 D フリップフロップ
ജ
ࠢࡠ࠶ࠢ
59
CK
ജ
D
Q
(D=0 CKχ㧕
(D=1 CKχ㧕
D
CK Q
1
0
Q
ォ
ജ
(D=1 CKχ㧕
(D=0 CKχ㧕
Q
time
&ࡈ࠶ࡊࡈࡠ࠶ࡊߩ࠲ࠗࡓ࠴ࡖ࠻
3ߩ⁁ᘒㆫ⒖
図 5.14: D フリップフロップ
DFF のセット,リセット端子:図 5.13 の PRE,CLR 端子の説明です。これは強制的に DFF の出力を 1
または 0 に設定する端子です。下図に示すように負論理の信号で,電圧が LowLevel になるとセット,リ
セットが働きます。例えば P RE が Lowlevel となるとセット入力となり,DFF の出力 Q が 1 になりま
す。また CLR が Lowlevel となるとリセット入力となり,DFF の出力 Q が 0 になります。
࠶࠻ജ
D
PRE
Q
PRE
CLR
CK Q
࠶࠻ജ CLR
Q
&ࡈ࠶ࡊࡈࡠ࠶ࡊߩ࠲ࠗࡓ࠴ࡖ࠻
CK 信号では立ち上がり,立下りのタイミング信号でしたが,PRE,CLR 端子信号は電圧が LowLevel に
なった状態に意味があります。前者はタイミング信号で,後者はレベル信号です。その違いに注意願い
ます。
DFF 以外にも JK フリップフロップ,T フリップフロップ等,いろいろなフリップフロップがある。それぞ
れ動作を引き起こすタイミング,および入力・出力の関係は異なる。
問題:
JK フリップフロップ,T フリップフロップとは,どのようなものか,その回路記号を調べ,その働きを述べよ。
DFF を用いたパルス数1/2逓減回路
動作の説明のため図 5.15 に DFF を用いた簡単な回路例を示す。DFF の反転出力 Q̄ を入力 D に接続し,
CK 入力に連続パルス列が入力されている状態を示す。ここで初期状態として Q = 0, Q̄ = 1 とする。
• そして CK 入力があるとその立ち上がりのタイミングで,D 入力の状態が出力 Q となる。
• このタイミングでは,D 入力は”1”であるため,DFF の出力 Q は”1”となり,その反転出力であるて Q̄
は”0”となる。
• この Q̄ は DFF の D 入力となるため,次の CK 入力の立ち上がりのタイミングでは,Q は 0 となる
• 即ち CK 入力の立ち上がりのタイミングで常に出力が反転する図 5.15 に示すような波形となる。
この回路は,入力パルス数を 1/2 にする回路としてよく使われる。CK の波形と Q 出力の波形を見ての通り,
CK の半分のパルス列となっている。この回路を 2 段 3 段とつなげていくことで,1/4,1/8 のパルス逓減回
路が構成できることになる。
5.10 カウンタ
60
CK
D
D
Q
Q
CK Q
ࡄ࡞ࠬ
ജ
Q
&ࡈ࠶ࡊࡈࡠ࠶ࡊߩ࠲ࠗࡓ࠴ࡖ࠻
図 5.15: D フリップフロップを用いたパルス数 1/2 逓減回路
データを取り込むタイミング:DFF でデータ取得のタイミングはクロック信号の立ち上がり (CK ↑)の
みでなく,立下り (CK ↓)で取り込む素子もある。
࠺࠲ࠍขࠅㄟ
࠲ࠗࡒࡦࠣ
CK
CK
leading edge
trailing edge
• 前縁トリガ型 (leading edge trigger):信号が 0 → 1 と変わる瞬間を捉える。(CK ↑)
• 後縁エッジ型 (trailingg edge trigger):信号が 1 → 0 と変わる瞬間を捉える。(CK ↓)CK 端子の
前に小丸がついている。
フリップフロップを用いた応用回路例
フリップフロップを用いるとパルス数を数えるカウンタ,コンピュータ内部でデータを保持するレジスタ,
パラレルデータをシリアルデータに変換するシフトレジスタ等いろいろな興味深いディジタル回路が構成でき
る。次からはこれら回路構成について簡単に述べる。
5.10 カウンタ
カウンタはパルス数の加減算と記憶を行う計数器回路であり,計数の方式により 2 進,10 進,16 進などさ
まざまなものがある。電子計算機の内部回路,各種のディジタル計測器に用いられることが多い。
(また,動作
方式で分けると同期形と非同期形がある。)図 5.16 は非同期式カウンタの例として 16 進カウンタを示す。図
5.16 では4つの D フリップフロップを接続したことから 24 = 16 進のカウンタとなっている。n個直列接続
することで 2n 進のカウンタが構成できる。このカウンタでは,1) 各フリップフロップの入力 D には Q 出力
が接続されている。2) また前段の出力が次段の CK 信号として接続されている。1) からこの接続はパルス入
力 (CK ↑) が来るたびに出力が反転する回路であり,結果としてパルス数は1/2となる。また 2) からは前段
の Q 出力が次段の CK 端子に接続されていることから次段のタイミング信号になる。以上を基にタイミング
チャートを作ったのが図 5.16 である。
この例では,タイミング信号を明らかにするため Q 出力を示しているが,カウンタとして考えるならば反転
出力 Q を出力とした方がわかり易い。
問題:
図 5.16 で示すカウンタで,CK 入力と Ai のタイミングチャートを作成せよ。入力パルス数を 2 進数でカウン
トしていることを確認せよ。
5.11 レジスタ/ラッチ
61
A0
A1
A2
A3
D Q
D Q
D Q
D Q
CK Q
CK Q
CK Q
CK Q
CK
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0
CK
A0
A1
A2
A3
図 5.16: 16 進カウンタの構成
非同期式:この方式は,前段のフリップフロップの状態の変化により次段を逐次駆動する方式です。この
ため全体のフリップフロップの出力が出るタイミングが次段にいくにつれて遅れることになります。この
ため,非同期式といわれ,回路が簡単である反面,各素子の動作の遅れ時間が重畳される欠点があります。
問題:
10 進カウンタにするのはどうすればよいだろうか? ただし,以下のことを付け加えないと解けないだろう。
それは,通常各種フリップフロップ,もちろん D フリップフロップにも,セット,リセット入力が備わってい
る。たとえばリセット入力が入れば,強制的にフリップフロップはリセット(Q →0)される。この機能を使
う。あと 10 進カウンタとするためには,2 進数表現で 9 を検出できればよいのだが・・。これがわかれば n 進
カウンタも構成できることになる。
5.11 レジスタ/ラッチ
計算機の内部回路などで数値データをディジタル処理する場合,通常は各ビットを独立なものとみなすので
はなく,複数のビットをひとまとめにして扱うことが多い。このような複数ビットのデータを一時的に記憶す
る回路はレジスタと呼ばれる。図 5.17 の例は,4bit レジスタを示す。図はコンピュータのバス構造で,バス
上の情報 (0/1) を,あるタイミングで取り込むための構成を示している。
バス構造とは何かを簡単に説明する。コンピュータでは CPU とメモリ間でデータのやり取りを行う。この
ときのデータの通り道がバスである。コンピュータ内部での信号の伝達は,全てバスと呼ばれる複数配線 (例
えば 16,32,64,128 本)を用いて伝達される。バスには,CPU,メモリのほか,ハードディスク,キーボードな
どの各種入出力装置のレジスタが並列に接続されている。但し,バスは単なる導線の集まりでしかなく,複数
のデバイス間のデータ伝達には,バスのタイムシェアリングで行うことになる。即ち,バスによる信号伝達は,
タイミングを合わせることである特定のデバイス間のデータ伝送が可能となる。このため,バス上のデータの
受理は,複数配線の数だけフリップフロップを揃えたレジスタを必要とする。即ち,バスにデータがあがった
5.12 シフトレジスタ
62
タイミングで,レジスタの CK 信号を加えることにより,そのときのバス上の情報がレジスタ内に保存できる
ことになる。
この例ではバス上の 4 本の配線で伝達される情報 (0/1) を CK 信号の立ち上がりのタイミングで記憶する回
路構成を示している。D フリップフロップを n 個接続することで n ビットのレジスタ/ラッチを構成すること
ができる。
BUS
CK
D Q
D Q
D Q
D Q
CK Q
CK Q
CK Q
CK Q
Q0
Q1
Q2
Q3
ࠫࠬ࠲㧛࠶࠴
DKV
図 5.17: 4ビットのレジスタ/ラッチの構成
5.12 シフトレジスタ
シフトレジスタは,フリップフロップに記憶されている情報を,クロックパルスごとに右または左に移動で
きるレジスタである。シリアルデータの受け取り・記憶や,並列データと直列データの間の相互変換などに広
く利用されている。また CPU 内部の論理演算処理でビットシフト等に利用される
図 5.18 に直列入力シフトレジスタの構成を示す。クロックパルスごとに入力信号を内部の D フリップフ
ロップに取り込むと同時に,前段のフリップフロップの内容を,次段のフリップフロップに逐次伝えていく方
式である。図 5.18 の動作説明を以下に示す。
• DFF0 は CK ↑の時の入力1を取り込む。このため A0 → 1 となる。(図では DFF0 入力は次の CK ↑
以前に 0 とした。勿論 1 としてもよい。入力データがシフトすることには変わりない)
• 次の CK ↑で DFF1 は入力である A0 を取り込み,A1 出力となる。このため A1 → 1 となる。
• DFF0 は入力が 0 であるため,A0 は 0 となる。(取り込みから出力の時間差のため DDF1 の入力時で
はまだ 1 であるが)
• 以下順に変化することで取り込まれたデータがシフトする。
図 5.18 のシフトレジスタは 4 ビットのものであるが,接続を増やすことでビット数を増やすことができる。
図 5.18 で CK が4つ入力後の状態をみると,直列に入力された 4 ビットが,A0,A1,A2,A3 の 4 ビット並列
データとなっている。このようにシフトレジスタは直列 → 並列変換機としても利用できる。
問題:
シフトレジスタは,並列入力 → 直列出力変換器として利用することも可能である。どのようにすればよいの
だろうか?(ヒント:D フリップフロップには図 5.13 に示すようにセット,リセット端子がある。)
5.12 シフトレジスタ
63
シリアルデータ:直列データともいわれ,1/0 ビット情報を単線で時系列のデータとして転送する方式で
す。USB,RS232C,Eathernet 通信データ等はシリアルデータ転送方式を利用しています。シリアル転送
方式は,1 ビットずつ送るためデータ転送に時間がかかり,高速転送には複数の配線を用いて並列にデー
タを転送するパラレル方式が有利であると言われていました。しかし,技術の進歩で高速なデータ転送が
可能なるに従い,転送速度を高くしていくと,距離が大きくなるに従い,パラレル方式では並列信号線間
の遅延差の問題を生じるため,転送速度に限界があります。この点,シリアルでは、遅延差の問題はなく,
ケーブル本数が少なくて済み、場所をとらないことでノイズ対策も可能なことから高速化が可能なことか
ら,高速なシリアル転送が見直されています。
A0
input
CK
A1
A2
A3
D Q
D Q
D Q
D Q
CK Q
CK Q
CK Q
CK Q
DFF0
DFF1
DFF2
DFF3
CK
INPUT
A0
A1
ࠪࡈ࠻ࠫࠬ࠲
DKV
A2
A3
図 5.18: 4ビットのシフトレジスタの構成
5.13 加算回路
64
加減算回路
ディジタル回路の基本は,いくつかの基本論理素子と,フリップフロップを理解することで終了することに
する。あえていえば,NAND 素子と D フリップフロップ素子のみでコンピュータなどは製作可能といっても
過言ではない。これから,基本論理素子を組み合わせて,2 進数の加減算が可能な回路について説明する。基
本論理素子を組合わせることで簡単に構成することができる。計算機内部で行われる加減算はこのような方式
を用いて行われる。
5.13 加算回路
加算回路とは 2 進数どうしを足し合わせる算術演算を行う論理回路である。本節では,まず 2 進 1 桁の加算
を行う中で,下位桁からの入力がなく上位桁への桁上げだけがある半加算器の回路を示す。そして次に下位桁
からの入力をも考慮した全加算器について示す。
5.13.1 半加算回路
半加算器は,2 進 1 桁の加算を行う回路である。図 5.19a)には,1 ビットの入力 a 入力とb入力との加算
を行う半加算器の概要を示す。入力は,a,b,それぞれ 1bit である。出力は,加算和の S(Sum) と桁上がりの
C(Carry) である。ただし,下位桁からの入力がなく上位桁への桁上げだけがある。
図 5.19b)には,a 入力とb入力の組合わせを示す。a,b ともに 0/1 の 2 状態しかとらないから,その組み合わ
せは 22 = 4 通りのみである。それらに対して a 入力とb入力の加算結果は,図 5.19b)のように表現できる。
この関係を表にまとめたものが図 5.19c) である。さて,次にはこの関係を実現する回路を論理素子から構成す
ജ
a
C
b
HA
S
a) 1bitඨട▚ེ
a→ ޓ0
0
b→ + 0
+ 1
0
1
a
b
C
S
1ޓ
0
0
0
0
1
0
1
0
1
1 0
1
0
0
1
1
1
1
0
1
+
0
+
1
S: Sum
C: Carry
b) 1bitട▚ߩ႐วಽߌ
E) 1bitඨട▚⌀ℂ୯
図 5.19: 半加算器
る。図 5.19c) の真理値表から次のようなことがわかる。
• 入力 a,bについて出力 C は,AND 回路で実現できる
• 入力 a,bについて出力 S は,XOR 回路で実現できる
このように,S(Sum)は a 入力とb入力に対して XOR 素子出力そのもの,また,C(Carry) は AND 素子出
力そのものである。この真理値表を実現する回路を図 5.20 に示す。このように 1bit 半加算器は基本となる論
理回路の簡単な組み合わせとして実現できる。
5.13 加算回路
65
a
C
b
a
S
b
a b
C
HA
S
ab
a)1bitඨട▚ེ
D)1bitඨട▚ེ࿁〝
図 5.20: 半加算器の記号と論理素子による構成法
5.13.2 全加算回路
次に,2 進 1 桁の全加算器について説明する。全加算器では半加算器ではなかった下位桁からの桁上げ入力
がある。この全加算器は半加算器 2 つを組合わせることで構成できる。a と b は一桁の入力ビットで,d は下
位桁からの桁上げビット,c は上位桁への桁上げビットである。ここで,入力信号の組合せ(a b d)と出力信
(a b d)→ (1 0 1) のとき,
(c s)→ (1 0 ) となる。これ
号 (c s) が合っていることを確認されたい。例えば,
は 1+0 の足し算で下位桁上げが有る場合に相当する。このとき,Sum は 0 となり,上位桁あげが有ること (C
=1) を意味する。
a
ജ
c
߳ߩ
ᩴߍ
a b
FA
s
d
ਅ߆ࠄ
ߩᩴߍ
a)1bitోട▚ེ
b
HA
c
d
HA
FA
s
D)1bitోട▚ེ࿁〝
図 5.21: 全加算器と半加算器による構成法
5.13.3 n 桁の 2 進加算器
以上で,1 桁の 2 進数の加算器が出来た。では n 桁の 2 進加算器を構成するにはどうするか。全加算器を n
個直列に接続すればよい。例えば,次のようの 16 桁の 2 進数の加算を行うためには図 5.22 のように 16 個接
続すればよい。
• 計算(16bit):S = A + B
• 入力 A(16bit):A(a15 a14 · · · a2 a1 a0 )
• 入力 B(16bit):B(b15 b14 · · · b2 b1 b0 )
• 出力 S(16bit):S(S15 S14 · · · S2 S1 S0 )
• d0 は通常”0”とする。
• C15 はオーバーフロービットを表し,”1”となるとオーバーフローが発生したことを示す。
5.14 減算回路
66
すなわち,
S15 S14 · · · S2 S1 S0 = a15 a14 · · · a2 a1 a0 + b15 b14 · · · b2 b1 b0
簡単ですね
a15 b15
c15
a14 b14
FA d C
FA
s15
s14
15
14
a1 b1
c1
d14
FA
a 0 b0
d1
d0
FA
c0
s1
s0
図 5.22: 16 個の全加算器による 16 桁の 2 進加算器の構成
5.14 減算回路
上記から加算回路の構成方法はわかった。では減算はどうするか?これには少々知識の準備がいる。即ち,
負の数をどう表現するかに関係する。これにはいくつかの方法があるが,コンピュータでは通常補数表現が用
いられる。以下にはこの補数表現について説明する。この補数表現を用いることで減算回路は,加算回路から
簡単に実現できる。即ち次の例に示すように減算は負の数の加算となる。
例)5 − 2 = 5 + (−2)
5.14.1 補数表現 (complement)
補数とは負の数を表現する一つの手法である。補数表現では 1) 数の引き算は補数の加算で行うことができ
る,2) 論理素子を用いて簡単に作成できる,などコンピュータ処理するときには有利な点である。表 5.2 で
は,2 進数 4 桁の場合の補数表現を示す。この表は,例えば”0000”から強引に”1”を引くと”1111”とし,これ
を”-1”とする。-2 を作成するには,”1111”からさらに”-1”とすることで”1110”となる。このように順次作成
する。”0”から”-1”に移るところは強引だが,後は無理のない手順である。
この表で,絶対値が同じ正負の数を足すと以下のようになる。
• ”1+(-1)=0”は,2 進演算では,0001 + 1111 = 10000
• ”2+(-2)=0”は,2 進演算では,0010 + 1110 = 10000
• · · ··
• ”7+(-7)=0”は,2 進演算では,0111 + 1001 = 10000
表 5.2: 2 進数 4 桁の場合の補数表現
-8
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
1000 1001 1010 1011 1100 1101 1110 1111 0000 0001 0010 0011 0100 0101 0110 0111
即ちいずれも”10000”となる。この例では 4 桁の 2 進数としたので 5 桁めの”1”は計算結果には関係ない。
この例からもわかるように,2 進の補数は以下のように作る。(2 → r に変われば r 進の補数表現になりる)
5.15 n 桁の 2 進加減算器
67
ここで”X”を 2 進数とし,n を桁数とする。
• ”X”の補数は,2n − X となる
• ここで,−X = 10000 − X = 1111 − X + 1 となる。
• 実は,1111 − X は X のビットを反転したものである。→なぜか?理由は簡単ですが宿題
• 即ち, 1111 − X = X̄ となる
• よって,− X = X̄ + 1 となる
ようするに,X の補数は,X のビット反転したものに 1 を加えること得られる。
2 進法の補数の作り方
ここで 2 進法の補数の作り方を例で示す。この方法は論理回路で簡単に実現できることから,実際のコン
ピュータでもこのような方法で 2 進法の補数を作っている。すでに述べたように,X の補数は X̄ + 1 として
作れる。即ち,X のビット反転したものに 1 をプラスすることで作れることになる。ここでは,例として,3
の 2 進数表現 (X=0011) の 2 の補数 −X(= X̄ + 1) の作り方を示す。(例では 4 桁とした。任意桁数でも方法
は同じ)
• X̄ :2 進数の全 bit を反転:”0011” → ”1100”
• X̄ + 1:”1”を加える:”1100” → ”1101”
• ”0011”(3) の 2 の補数表現は”1101”(-3) となる
補数を用いた計算:補数は 2 進法のみでなく任意の r 進法の補数表現も可能である。以下に例として 2 進
法と 10 進法の補数と,補数を用いた計算を示す。
1. 補数
(a)2 進法 4 桁:”0011”の 2 の補数は,24 -0011=10000-0011=1101
(b)10 進法 2 桁:”38”の 10 の補数は,102 -38=100-38=62
2. 計算
(a)2 進数: 0101-0011=0110+1101=(1)0010 ← (5-3=2) (5 桁目は無視)
(b)10 進数: 85-38=85+62=(1)47 ← (85-38=47) (3 桁目は無視)
5.15 n 桁の 2 進加減算器
以上で,負の数は2の補数表現で表わせることがわかった。これを使えば,減算でも加算のように計算がで
きる。即ち,A-B を A+(-B) のように計算すればよい。ここで問題は,B から,その2の補数表現,-(B) に簡
単に変換できるかである。これが意外に簡単にできる。その方法をみてみよう。さて,補数は,2 進数の全 bit
を反転,それに”1”を加えることで作れる。
ここで演算回路は加算にも減算にも利用できるようにしたい。これを図 5.22 に少し回路を加えて実現するこ
とにする。
5.15 n 桁の 2 進加減算器
68
減算時の 2 進数の全 bit の反転回路 (X̄)
まずはじめは,減算の時は 2 進数の全 bit の反転を行い,加算では行わない回路を作る。この反転・非反転
の操作は XOR 素子を用いる。2 入力の XOR 素子は,一方の入力を”0”とすれば,入力と出力は常に同じとな
り,”1”とすれば,出力には入力の反転出力となる。即ち,NOT 素子となる。図 5.23 にその動作を示す。こ
x
x
0
0
1
1
f
y
XOR
y
0
1
0
1
f
0
1
1
0
a) XOR⚛ሶߣ⌀ℂ୯
y = 0x f
0 0
1 1
y=1 x f
0 1
1 0
f=x
f=x
b) [㧦ߘߩ߹߹[DKVォ㧦
図 5.23: XOR 素子による反転・非反転操作
れで,XOR を使えば 2 進数の全 bit を反転/非反転とすることができる。
減算時 +1 回路 (X̄ + 1)
次に,”1”を加えることは,図 5.24 のように加算器の下位ビットからの桁上げビット d0 を”1”とすれば実現
できる。
以上をまとめた例として,図 5.24 に 16 桁の 2 進数の加減算を行うための論理回路を示す。計算は,A(=
a15 a14 ···a2 a1 a0 ) の 16 ビットとに,B(= b15 b14 ···b2 b1 b0 ) の 16 ビットとを加減算し,S(= S15 S14 ···S2 S1 S0 )
の 16 ビットとして結果を得る。
1. 加算:制御信号 x が”0”の場合
(a)図 5.22 の加算回路と同じ
2. 減算:制御信号 x が”1”の場合
(a)XOR 素子は反転素子となり,B(= b15 b14 · · · b2 b1 b0 ) の全 bit が反転される。(X̄)
(b)d0 = 1 となることは,最下位桁に桁上げがあることだから,”1”を加えることに相当する。
(c)その結果 B の補数 B̄ となる (X̄ + 1)
(d)よって,S = A − B が実現できる。
(e)また C15 はオーバーフロービットを表し,”1”となるとオーバーフローが発生したことを示す。
以上から,
if x = 0 → a15 a14 · · · a2 a1 a0 + b15 b14 · · · b2 b1 b0 = S15 S14 · · · S2 S1 S0
if x = 1 → a15 a14 · · · a2 a1 a0 − b15 b14 · · · b2 b1 b0 = S15 S14 · · · S2 S1 S0
となる。
5.15 n 桁の 2 進加減算器
69
b15
a15
b14
a14
b1
a1
b0
a0
x
0: add
c15
FA
d15
C14
s15
FA
d14
c1
s14
FA
1: sub
d1
c0
s1
FA
d0
s0
図 5.24: 16 桁の 2 進加減算器の構成
論理演算
以上で 2 進数の加減算ができる。また図 5.24 に,少し回路を追加することで,ビットごとの論理演算がで
きるようになる。例を基に説明する。まず,16 ビットの2つ入力 a,b の第 i ビットをそれぞれ a(i), b(i) とす
る。すると全てのビットに対して同時に g(i) = a(i) · b(i), (0 ≤ i ≤ 15) なる結果 g(i) を求めることを,ビッ
トごとの AND 演算と呼ぶ。コンピュータでは,単に数値演算のみでなく,これらビット演算ができることが
必要である。この論理演算として,AND 以外に,OR,XOR などがあり,どのようにして実現するかは問題と
して示す。
これまで述べた,2 進数の加減を行う算術演算,そしてここで説明した論理演算ができる回路は,算術論理
演算器 (ALU:arithimetic logic unit) と呼ばれる。
問題
少し回路を追加することで,ビットごとの論理演算が可能になる。AND(ab),OR(a+b),XOR(a
図 5.24 の回路に,
xor B) などが可能である。以下の回路はどのようにすればよいか?
1. g(i) = a(i): a の通過
¯ b の反転
2. g(i) = b(i):
3. g(i) = a(i) · b(i):AND 演算
4. g(i) = a(i) + b(i):OR 演算
5. g(i) = a(i) ⊕ b(i):XOR 演算
ヒント:全加算器 (1bit) の論理式は次のようになる。s = a ⊕ b ⊕ d, c = ab + bd + da となる。さて,ここで d
を 0 あるいは 1 に固定するとどうなるかな?
2進補数表現での数の表現範囲:コンピュータの内部での整数表現のとき,2 進数で正負の範囲を表すこ
とが一般的である。しかしながら,大きな整数範囲のみの値を取り扱いたいとき,また数値ではなくビッ
トのパターンとして利用したいときなど,正の範囲表現のみと宣言した方がよい。これはプログラム作成
上分かり易いこと,また I/O 入出力制御などの場合,処理もビット毎の処理となることが多いので取り扱
いが便利である等の理由がある。このように場合によって整数の数表現を使い分けることが必要になる。
表 10.2 に2進補数表現での数の表現範囲を示す。
1. 符号付き (signed):正負の範囲を表現する
2. 符号なし (unsigned):正範囲のみを表現する
5.15 n 桁の 2 進加減算器
70
表 5.3: 2進補数表現での数の表現範囲
byte 数
正負範囲(signed)
正範囲(unsigned)
1
-128 ∼127
0 ∼255
2
-32768 ∼32767
0∼65535
4
-2147483648∼2147483647
0∼4294967295
71
第6章
DA,AD 変換器
はじめに
この章では,計算機と外部の計測機器とのインターフェースとして良く用いられる DA,AD 変換器につ
いて説明する。DA 変換器とはデジタル情報をアナログ信号に変換するもので,AD 変換器はその逆である。
我々の住む物理世界は力,位置,速度,温度などすべてアナログ情報であり,計算機内部のデジタル情報との
やりとりを行う場合には必ず必要な機能である。
• DA 変換器:digital 値 → analog 値
• AD 変換器:analog 値 → digital 値
6.1 AD,DA 変換器
DA 変換機と AD 変換器について説明する。DA 変換器とはデジタル情報をアナログ信号に変換するもので
DAC とも表記されることがある。また AD 変換器はその逆であり,ADC とも表記されることがある。我々
の住む物理世界は力,位置,速度,温度などすべてアナログ情報であり,計算機内部のデジタル情報とのやり
とりを行う場合には必ず必要な機能である。図 6.3 にはその関係を示す.ロボットで物体をつかむ場合,物体
の位置にハンドを移動させ,適当な力で掴む必要がある.このためロボットからハンドの位置情報と把持力を
計算機に送り,計算機ではこれらの情報から適切なロボットの動作を行わせる指令を送る必要がある.ハンド
の位置,把持力はセンサから電圧などのアナログ量で出力される.また,ロボットの動作は各関節に取付けた
モータに電圧として与える必要がある.即ち,ロボット側で直接関係する量はアナログ量であり,制御を行う
計算機側ではディジタル量を扱う.この両者の間を取り持つのが AD DA 変換器である.
• ロボットなど実際の物理世界:analog 量
• 計算機などコンピュータ内部:digital 量
• 両者の間を取り持つのが AD DA 変換器
この他,たとえば体温計についみると,今日体温を 36.7 度とディジタルで表示するディジタル体温計がよく
利用されている。この体温計で,温度を計測する部分は,例えばサーミスタと呼ばれる温度によって抵抗値が
変化する素子を用いている。この抵抗値変化は温度に対して,連続的に変化するものであり,通常連続する電
圧の変化として検出できる。即ちアナログ情報である。しかるに体温を 36.7 度とディジタルで表示させるた
めには,この連続する電圧の変化を,ディジタル量に変換する必要がある。このときに必要となるのが AD 変
換器と呼ばれるものである。
6.1 AD,DA 変換器
72
図 6.1: アナログ量とディジタル量
アナログ値からディジタル値への変換の様子
図 6.2 には,アナログ量をディジタル量に変換する場合の様子を,横軸に時間をとって説明する。図で赤
線がアナログ量,青線がディジタル量を示す。この例では,AD 変換器の分解能を 2bit とした。2bit とは”
00,01,10,11”の4状態 (22 = 4) を表し,アナログ値をこの 4 つのレベルで代表してディジタル値に変換する
ことになる。図 6.2 では,アナログ値を 4 レベルとしたときの様子を示す。4 レベルでは元のアナログ信号を
正確には表現することができず,かなりデコボコした変化となることがわかる。また AD 変換器は,時間的
に変化するアナログ値をディジタル値に変換する。その変換タイミングは通常一定の時間間隔で行い,サンプ
リング時間間隔もしくはサンプリング周波数という。図ではそのサンプリングのタイミングを矢印で示してあ
る。AD 変換器は,サンプリングタイミングで,アナログ値をディジタル値に変換していくことになる。その
結果,図に示すように”00,00,01,10,...”のような,ディジタル値の時系列として出力される。
10
01
ࠕ࠽ࡠࠣ୯
࠺ࠫ࠲࡞୯
11
ࠨࡦࡊࡦࠣ
00
00
01
10
10
11
11
10
10
00
ᤨ㑆
#&ᄌ឵⚿ᨐߩᤨ♽
図 6.2: アナログ量とディジタル量
図 6.2 に示すように,分解能が 2bit の 4 レベルでは元の入力波形を正確に再現しているとは言い難い。この
6.2 DA 変換器 (Digital Analog Convertor)
ため分解能は,4bit 以上,例えば 10bit,12bit,14bit,16bit 程度の分解能のものを利用する必要がある。また,
強度の分解能のみでなく,アナログ値が早い時間変化をする場合には時間分解能が重要となる。これからもわ
かるように,アナログ値をできるだけ正確にディジタル値に置き代えるには,高い分解能 (bit 数の大きなも
の),早い変換速度 (高いサンプリング周波数) のものが望まれる。
現在では,DA 変換器や AD 変換器は,1チップ化されたものが多数製品化されている。DA 変換器や AD
変換器を選定する場合には.その用途に応じて,変換速度やビット数,そして価格等を比較検討を行い選定す
る必要がある。ここではいくつかの基本的な変換方式を紹介し,その結果生ずる特徴や問題点を述べることに
する。
図 6.3: AD 変換器と内部ブロックダイアグラム例
6.2 DA 変換器 (Digital Analog Convertor)
2進数 (Digital) を電圧/電流 (Analog) に変換する。DA 変換器ではその変換分解能として 8bit, 10bit,
12bit, 14bit, 16bit といった呼び方をされる。例えば,8bit とはデジタル入力の bit 数で 28 = 256 の分解能を
有する。
例として,12bit の DA 変換器を考えよう。この変換器の出力電圧を± 10V とするとこの変換器の bit 当たり
の分解能は以下のようになる。
ΔV = 20/212 = 20/4096 = 0.004883 · · 4.883mV
即ち,bit 数が多い DA 変換器ほど,2進数で表された情報(この場合は電圧)をより正確な出力電圧に変換
することが可能となる。ここで例として電圧値によって回転速度が決まるモータがあったとする。すると計算
機の中で演算した速度値(←ディジタル情報)で,このモータの回転速度を制御しようとした場合,bit 数が
少ない DA 変換器を使うと,制御速度が飛び飛びの値となってしまい,滑らかな速度制御が出来ないことにな
る。また違う例として,CD から音楽を再生するオーディオ装置の場合を考えてみよう。この場合,音の情報
はディジタル情報で格納されている。この情報を基にスピーカから音を出すとき,bit 数が少ない DA 変換器
を使うと,音の強さが飛び飛びの値となってしまい,滑らかな音の強弱が再生できない。このように計算機内
部の情報(←ディジタル情報)を我々が関係する実際の物理世界の情報(←アナログ情報)に変換する場合に
は,DA 変換器が必要であることはもちろん,その分解能が問題となる。
同様に,ディジタル情報をアナログ情報に変換にかかる時間も重要であることは明らかである。この変換時間
はもちろん短いほどよい。但し,この変換時間と分解能の関係は相反する関係にあり,一般的にビット (bit)
数の多いものほど変換時間が長い。またビット (bit) 数が多く,かつ変換時間の短いものは高価である。この
ように DA 変換器を選定するときは,必要とする分解能(ビット数),変換時間と価格を考慮しながら選定す
73
6.2 DA 変換器 (Digital Analog Convertor)
る。また,DA 変換器では,加えるディジタル入力の方式(2進補数表現/絶対値表現・・)
,出力方式(電圧
/電流,レンジ,極性・・・)など,変換器にあるピン間をジャンパ配線することによって変更できることが
多い。利用する前に設定をキチンと確認することが重要である。
• 分解能:ビット数 (8,10,12,14,16bit などある) が大きいほど高分解能
• 変換時間:早いほど良いが,分解能とトレードオフの関係にある。もちろん高分解能で高速のものはあ
るが高価である。
6.2.1 抵抗回路網形 DA 変換器
はしご形 DA 変換器は,抵抗回路網として図 6.4 に示すように R と 2R の2種類の抵抗を組み合せた,はし
ご形(ラダー)回路を利用したもので,2進コードの DA 変換に対して最も広く用いられている。
例)例として,入力として 2bit とする DA 変換器の回路を示す。入力は 2bit であるので出力は4段階の電圧
出力となる。
図 6.4: 抵抗回路網形 DA 変換器。はしご形(ラダー)回路を利用
i1 = i1 + i0 · · · ·(1) i1 = bq Vr /2R · · · ·(2)
bq Vr − 2Ri0 = 2R(i0 − i0 ) · · · ·(3)
i0
(2)(3) より i1
i0
i1
V0
= 3/8b0 (Vr /R)
= 1/2b1 (Vr /R)
= 1/4b1 (Vr /R)
Vr
b1
b0
=
+
21
22
R
Vr
b1
b0
= −Ri1 = 1
+
V
r
21
22
R
となる。
上記例では 2bit の入力,即ち,0(00),1(01),2(10),3(11) の4入力状態に対して,出力電圧を 0kVr ,
1/4kVr ,2/4kVr , 3/4kVr とする回路である。入力は,図 6.4 の2個のスイッチによって行う。例では,2個
とも b0=b1=1 の状態,即ち Vr に接続してある場合を示している。すると (1)(2)(3) 式が成り立ち,結果とし
74
6.3 AD 変換器 (Analog Digital Convertor)
て出力は上式で表される。この最後の式の意味するところは,b0 に 1/4 と b1 に 2/4 を乗じたものを加算し,
定数倍したものが出力となる。即ち,2進から電圧出力に変換されることになる。この例では 2bit であるが,
同様なはしご形(ラダー)回路を加えていけば nbit の変換器が構成可能となる。注)k = Rf /R とする。
問題:4bit の DA 変換器を設計せよ。
6.3 AD 変換器 (Analog Digital Convertor)
一般に電圧/電流 (Analog) の値を,2進数 (Digital) をに変換する装置を AD 変換器という。AD 変換器では
その変換分解能として 8bit, 10bit, 12bit, 14bit, 16bit といった呼び方をされる。例えば,入力範囲が 0∼10V
の電圧があったとすると,8bit の AD 変換器の場合では 1bit あたり, 10/28 = 10/256 = 0.0391 · · 39.1mV
の電圧変化の細かさ(量子化という)で入力電圧をディジタル情報として取り込めることが可能である。これ
が例えば,12bit の場合であると 1bit あたり,10/212 = 10/4096 = 0.0024411 · · 2.44mV となり,より細
かな単位で変換が可能となる。即ち入力電圧のより正確なディジタル情報として取り込むことが可能となる。
AD 変換器は DA 変換器から構成することができる。例として DA 変換器を利用して,AD 変換器を作って
みる。
図 6.5: AD 変換器 DA 変換器を用いた構成
(1)
(2)
(n)
bn−1 : if (Vin Vout ) then bn−1 = 1
if (Vin ≺ Vout ) then bn−1 = 0
bn−2 : if (Vin Vout )then bn−2 = 1
if (Vin ≺ Vout ) then bn−1 = 0
b0
: if (Vin Vout ) then
if (Vin ≺ Vout ) then
······
b0 = 1
b0 = 0
図 6.5 の回路は nbit の変換の AD 変換器を示す。このように簡単のものである。DA 変換器以外に,入
力電圧 Vin と DA 変換器からの出力電圧 Vout の電圧レベルを比較する電圧比較器と,DA 変換器に加え
る bit(b0 ,b1 ··,bn−2 ,bn−1 ) の ON/OFF を制御する制御回路が必要となる。入力電圧 Vin がディジタル値と
し (b0 ,b1 ··,bn−2 ,bn−1 ) のビット列として変換される。変換の手順は次のようである。まず,始めに最上位
bit(bn−1 ) を (1) に示すように”1”としてみる。この時これ以外の bit は全て”0”とする。すると図 6.5 中の DA
変換器は,このディジタル値に対する出力電圧 Vout を出力する。そこでもし,出力 Vout が入力 Vin よりも大
きいならば,最上位 bit(bn−1 ) は”0”である必要がある。また出力 Vout が入力 Vin よりも小さいならば,最上
位 bit は”1”となる。このように,DA 変換器に加える入力を上位 bit から加えて逐次比較を行いながらその値
を決めて行く。すると,n 回の試行によって,入力電圧が nbit のディジタル値として変換されることになる。
この方法は逐次比較形 AD 変換器といわれる。
75
第 II 部
B:センサ・アクチュエータシステム技術
77
第7章
センサ
はじめに
センサは,対象物の状態量を計測する装置である。通常,対象物の状態量としては,”位置,変位,角度,速
度,加速度,力,圧力,温度,流速・・”などがあり,これらを計測して,主に電気量(電圧,電流)に変換す
る。センサは,メカトロニクス装置を構成する重要なフィードバック要素である。
• 物理量(角度,速度,加速度,力,圧力,温度,流速)→電気量(電圧,電流)に変換
⋡
ᮡ
㊂
ࠦࡦ࠻
ࡠ
ࠕࠢ࠴ࡘ
ࠛ࠲
ࠕ࠽ࡠࠣ࿁〝
࠺ࠫ࠲࡞࿁〝
ࠦࡦࡇࡘ࠲
㔚᳇ࡕ࠲
ᴤࡕ࠲
ࡔࠞ࠾࠭ࡓ
ࡦࠢᯏ᭴
╬ߩࡔࠞ࠾࠭ࡓ
ᓮ
㊂
ࡦࠨ
⟎㧘ⷺᐲ㧘ㅦᐲ㧘ടㅦᐲࡦࠨ
ജࡦࠨ
᷷ᐲࡦࠨ╬
図 7.1: メカトロニクスシステム概念図
センサは,計測や記録あるいは制御信号として利用される。このためセンサ出力は,電気量が使われること
が多い。よって本章では,種々の物理量を電気信号に変換するセンサを考えることにする。
通常,センサからの出力信号は徴弱で,雑音にも弱いため,それを増幅器やインピーダンス変換器,フィル
タなどを通して信号のエネルギーや質を高める必要がある。また,最近のIC技術の向上により,センサ部分
にそれらの前処理機能を付加したものなども製品化されつつある。
7.1 センサの性能
78
7.1 センサの性能
センサの性能を定める代表的な機能を以下に示す。またセンサは測定する対象および測定量に対して数多く
の種類があり,それぞれに対して特定の性能表示が行われる。
精度(accuracy):正確さを示す。通常,誤差量で表す
1. 再現性(繰り返し測定時のばらつき)
2. 絶対精度
図 7.2 には,真値と偏り, 測定のバラツキの関係について示す.通常,測定値は真の値から離れた値として測
定される.測定を繰返すとその離れた値の近くにばらついて測定される.測定では,ばらついた測定値の平均
値を通常測定値とする.再現性はこのバラツキにあたり,絶対値は真値からの偏りを補正する必要がある.
᷹ቯߩ
ࡃ࠷ࠠ
ࠅ
⌀୯
᷹ቯ୯
ᐔဋ୯
図 7.2: 測定の真値,偏り,バラツキの関係
分解能 (resolution)
センサなどで対象を測定または識別できる能力ここと。機械部品の寸法を測るノギスでは,最小読み取りは,
0.05mm(副尺 20 等分)であり,これが計測の分解能となります。またマイクロメータでは,0.01mm まで計
測できるので分解能はこの値となります。但し,「分解能」は最小読み取り可能単位(目盛りの細かさ)であ
り,「測定値の正確さ」や「測定値の再現性」ではない点に注意する。
測定範囲 (range)
測定可能な上限値と下限値のことである。位置,変位,角度,速度,加速度,力,圧力,温度など様々な物
理量に対し,その測定範囲に適切なレンジのセンサがあり,そのようなセンサを選ぶ必要がある。例えば,体
重の計測では,100kg 程度の測定レンジがあればよく,1000kg までのものを用いるのは,測定レンジ内ではあ
るが計測精度が低下する恐れがある。
7.2 変位の検出
79
応答性 (dynamic response)
例えば動いてるものを計測したい場合,応答性が重要になる。応答性とは,センサが反応するまでの応答時
間,応答周波数のことである。この応答時間が遅いものでは,早く変化する現象を正確に計測することはでき
ない。
以下からは,変位,速度,加速度,力,温度を計測するためのセンサについて簡単に解説する。
7.2 変位の検出
変位や角度を直接電気信号に変換するには, 抵抗変化を利用する方法のほかに,容量や誘導変化を用いる方
式がある。
7.2.1 ポテンショメータ
センサの原理は,図 7.3 に示すように,抵抗体と接点との相対的位置による抵抗変化から,直線変位や回転角
度を知ろうとするものである。図には直線変位および回転変位を計測するポテンショメータの原理図を示す。
図左には直線型のものを示す。A,B 端子間に電圧 E を加え,A,C 端子間の電圧 V を計測する構造になって
いる。端子 C は,長さ L の抵抗体に接触しながら変位するブラシに接続されている。変位する対象にこの端
子 C 部分を取付ると,その変位 x は次式となる。このように抵抗体上を動くブラシによる抵抗値の変化とし
て,回転角や位置を検出する。
x=L
V
E
このポテンショメータの利点として,安価,簡便なこと,欠点として,ブラシの接触による摩耗がある。精度
は1%程度である。例)図 7.3 の右には直線変位を計測するポテンショメータを示す。この製品のカタログに
V
C
ࡉࠪ
Ꮐฝߦേߊ
ᛶ᛫
L
A
ᛶ᛫
x
B
E
A
C
B
⋥✢ဳࡐ࠹ࡦ࡚ࠪࡔ࠲
図 7.3: ポテンショメータ
よると,1) 一億回の長寿命。2) 10m/s の高速動作に対応。3) リニアタイプは、25∼3000mm のストローク長
を用意。とのことである。
7.2.2 差動変圧器
直線変位の計測の代表的なものとして差動変圧器がある。差動変圧器は,図 7.4 に示すように,駆動電源側
の1次コイルと,検出側の2次コイルの間に,可動鉄心が挿入された構造で,2次コイルの巻き方を図のよう
に中央で逆転させることにより,差動出力が得られる。いま鉄心が中立点にあれば左右対称であるため2次コ
イルの差動出力は零となる。鉄心が左右に動くことにより,誘導係数が変化し,差動出力は図右の特性図に示
すように変化する。動作方向は出力電圧の位相によって判別できる。差動変圧器は計測系が左右対称であるた
7.2 変位の検出
80
め,温度等の外部環境の変化の影響が対称になるため差動出力を取ることによってキャンセルできる特徴があ
る。差動変圧器は,μ m 程度の微小変位から 100mm 程度の大変位用まであり,応用範囲は広い。
㔚
㕖⏛ᕈ
Ꮞᨒ
㧝ᰴࠦࠗ࡞
㕖⏛ᕈ
㋕ޓᔃ
㧞ᰴࠦࠗ࡞
㧞ᰴࠦࠗ࡞
x
x
ᄌ
図 7.4: 差動変圧器の構造
7.2.3 レゾルバ
回転変位を測定する方法として電磁誘導の変化を用いる方式としてレゾルバがある。その原理は,固定子巻
線と回転子巻線のどちらかに交流電圧を加えると,電磁誘導によってもう片方に同一周波数の交流電圧が誘起
されることを利用する。そしてこの巻線間の相互の位置関係が変化すると誘起される交流電圧も変化すること
から位置関係を計測する。図 7.5 ではレゾルバの構造を,図 7.6 にはレゾルバからの出力波形を示す。横軸は
時間を表す。図 7.5(a) は単相励磁・単相出力センサの例を示す。固定子に V sin(ωt) の入力を加えると回転子
に V sin(ωt) · cos(θ) の交流電圧が得られる。この出力は,固定子入力に回転子の角度 (θ) によって変化する
cos(θ) で振幅変調された出力となる。よって,回転角度の検出は,この出力の振幅から回転角度 (θ) が計測で
きる。
2相励磁・単相出力センサ
また図 7.5(b) では2相励磁・単相出力センサの例を示す。2つの固定子にそれぞれ,V sin(ωt),V cos(ωt)
の電圧を加えると,回転子にはこの両方の固定子からの起電力として回転子に V sin(ωt + θ) の交流電圧が得
られる。
V sin(ωt + θ) = V sin(ωt) · cos(θ) + V cos(ωt) · sin(θ)
この場合,回転角度 (θ) が出力の位相角の変位として得られる。
図 7.6(a) に示す単相励磁・単相出力の場合の振幅比では,振幅の絶対値から角度を計測するため,環境ノイ
ズ,温度による振幅変動などの影響が大きい。一方,図 7.6(b) の2相励磁・単相出力センサの場合は位相角を
計測すれば良く,回転角を計測できる
• 利点:構造が簡単,頑丈,高速回転に適する,アブソリュート型など
7.2.4 ロータリーエンコーダ
ロータリーエンコーダは回転変位量をパルス列として出力するディジタル型検出器である。その構造は図
7.7 に示したようにスリットを刻んだ円板と発光・受光素子のペアから構成されている。発光素子からの光は,
スリット円板の回転により断続され,パルス出力として検出される。例えば,一周 360 本のスリットが円板に
7.2 変位の検出
81
Vsinωt cosθ
Vsin(ωt+ θ)
θ
θ
Vcosωt
Vsinωt
図 7.5: レゾルバ(単相励磁・単相出力)と(2相励磁・単相出力)
Vsinωt cosθ
cosθ
Vsin(ωt)
t
t
90
180
270
Vsin(ωt+ θ)
θ
図 7.6: レゾルバの出力波形
刻んであれば,その分解能は(360 / 360) 度となり 1 度回転するごとに1つのパルスが出力される。また,回
転方向の検出には,固定スリットの2つのスリットからの出力 A 相と B 相を用いる。この固定スリットの間
隔は,回転スリットからの断続する光が丁度 1/4 波長ずれた間隔となるように作られている。このため 2 つの
受光素子からの出力 A 相と B 相は,1/4 波長 (位相として 90 度)ずれた出力となる。図左に,回転に伴う信
号出力のようすを示す。図の横軸は回転角度である。図で左から右方向への移動は正転方向 (CW) を表す。回
転角度の検出は A 相と B 相パルスの立ち上がりを用いる。正転(CW,クロックワイズ)の場合をみてみよ
う。回転方向が例えば正転であれば,A 相からの信号がゼロから1に立ち上がったときに B 相は”1”状態であ
る。また,逆転(CCW,カウンタークロックワイズ)では B 相は”0”の状態であることから,回転方向を判別
できる。ここで図の横軸は時間でなく,回転角度であることに注意されたい。逆転の場合,時間変化は図で右
から左へと進み,A 相出力の立ち上がりは図で示した矢印のタイミングになる。回転に伴うパルスは,アップ
ダウンカウンタに入力されて計数される。正転の場合はアップ(+)へ入力され,逆転の場合はダウン(−)
に入力されパルス数を計測することで,現在の回転位置を計測する。また,円板にはもう一つ全周にただ−個
所だけ Z 相と呼ばれるスリットがあり,角度の原点となる。ここからのパルスを用いることでカウンタをリ
セットする。このことを原点セットという。このようなカウンタとともに用いて初めて角度を決定する形式の
エンコーダは,パルスエンコーダあるいはインクリメンタル形エンコーダと呼ばれている。そして,原点位置
はカウンタをリセットした時点で設定される。
7.3 速度・加速度の検出
82
図 7.7: エンコーダ原理図と正逆回転時における A 相 B 相出力のようす)
7.2.5 マグネスケール
図 7.8 に示すように,一定波長の正弦波状磁気パターンを磁性体に記録した磁気スケールと 2 個の磁束ヘッ
ドで構成する。1/4 波長位相をずらした位置に配置したヘッドに,高周波信号 sin(ω0 t/2) を流すと,以下のよ
うな出力が各磁気ヘッドで計測され,この2つを合成すると以下のような出力が得られる。
e1 = E0 sin(2πx/λ)sin(ω0 t/2)
e2 = E0 sin(2πx/λ)cos(ω0 t/2)
→ E0 sin(ω0 + 2πx/λ)
上式に示すように,ヘッド位置 x が出力信号の位相 (2πx/λ) として検出できることになる。実際の製品では,
分解能 0.5 μ m 程度。構造上 30m 程度の長尺も可能。例として,図右に製品例を示す。図左は回転形磁気ス
ω0
1/4
図 7.8: エンコーダ原理図と正逆回転時における A 相 B 相出力のようす)
ケール 図右は直線形磁気スケールである。磁気検出方式であるため、油・汚れに強く,信頼性が高い利点が
ある用途としては,NC ターニングセンタ・立旋盤・横型マシニングセンタ・NC サーキュラテーブルなどの
回転軸制御に利用される。
7.3 速度・加速度の検出
速度は,変位の時間微分によって求められる。速度はサンプリング周期をTとすると,時刻 ti−1 と ti の時
の位置をそれぞれ Pi−1 , Pi とすれば速度は,(Pi − Pi−1 )/T で求まる。ここで問題は,このような微分操作で
7.3 速度・加速度の検出
83
はノイズの影響を受けやすいことと,サンプリング周期Tが長くなると,その間の速度は求められないことに
なる(もしくは補間操作によって推定することになる)
。特に,モータの制御では,回転速度が重要となる場合
がある。そのときには以下に示すような回転速度を検出するタコメータセネレータを用いて計測を行う。
7.3.1 タコメータゼネレータ(略してタコゼネレータ,タコゼネ)
タコメータゼネレータは回転速度に比例した電圧を出力する発電機である。発電機とモータは同じ構造であ
り,動作原理も同様である。詳しくは,アクチュエータの章で述べる。よって,このタコメータゼネレータに
も DC 型と AC 型がある。DC 形の原理は直流発電機そのものである。固定子にある永久磁石の N 極から S
極への磁界を回転するコイルの導体が横切ることによって電磁誘導により電流が発生し,回転によるブラシを
通して発生電流を取り出す構造である。回転速度に比例する直流電圧が得られる。AC 形の原理は,上記と同
様でただ回転子が永久磁石で,固定子がコイルとなる。ただ回転につれて誘導される電流の方向が変わるので
交流電流となる点が異なる。回転速度に比例する電圧と交流周波数が得られる。
7.3.2 加速度の検出
加速度センサは計測対象に取付,対象の振動加速度等を計測するために使用される。一般的には図 7.9 のよ
うな,質量・バネ・ダンパの構造を有するサイズモ系を利用する。取付対象の絶対座標系からの変位を x,セ
ンサ内部の質量とセンサ本体のケースとの相対的変位を y とすると以下の式が成り立つ。
m(ẍ + ÿ) + cẏ + ky = 0
この式から対象の絶対座標系(静止系)からの変位 x とそれに対する応答 y の関係を伝達関数の形で求めると
次式のようになる。
Y (s)
s2
= 2
X(s)
s + 2ζω0 s + ω0 2
k
c
2
ただし,
ω0 =
, ζ=√
m
mk
−
ω0 はセンサの固有振動数,ζ はダンピングレシオとよばれる。加速度 A(s) に対する応答は A(s) = s2 X(s) よ
り次式のようになる。
−
Y (s)
Y (s)
1
=− 2 = 2
A(s)
s X
s + 2ζω0 s + ω0 2
周波数伝達特性は s = jω とおくと,
Y (jω)
1
= 2
ω 2 X(jω)
ω0 − ω 2 + j2ζω0 ω
この周波数伝達特性のゲイン特性は,
|Y (jω)|
1
=
2
2
2
|ω X(jω)|
(ω0 − ω )2 + (2ζω0 ω)2
この式は,ω0 ω のとき,すなわちセンサ系の固有振動数よりも,計測振動数が十分に低いとき
|Y (jω)|
1
|ω 2 X(jω)|
ω0 2
と一定値になる。即ち,内部質量 m と本体ケースとの相対的変位 y と加速度は比例するから,y を計測するこ
とで加速度が計測できる。
7.4 力の検出
•
84
この式は標準2次系の伝達関数となり,ζ 0.7 程度とすると,ω/ω0 ≺ 0.4 以下の範囲で,加速度 A(s) に対する変位応答 y
は,ω0 2 Y /A = 1 となり,変位 y を計測することで加速度が計測できることになる。
具体的な製品の構造は図右のようなものがある。片持ち梁先端に質量を取付,ひずみゲージにより梁のひずみ
を計測することで質量の相対変位 y を計測する。
Z[
Z
ࡦࠨ
ᧄ
O
߭ߕߺࠥࠫ
O
[
M
Z
E
[
ࠝࠗ࡞࠳ࡦࡄ
図 7.9: サイズモ系を利用した加速度センサ
7.4 力の検出
7.4.1 ひずみゲージ (strain gage)
金属抵抗線あるいは半導体に歪みが生じると抵抗値が変化することを利用したセンサである。図 7.10 に示
すように抵抗線を Δl だけ伸ばすと,その断面積が ΔS だけ減少する。すると始めの抵抗線の電気的抵抗値を
R とすると,伸張後の電気的抵抗値は R + ΔR となり抵抗値が増加する。 この関係は以下のように計算で
l
ᛶ᛫㧦R
S
િ߫ߔ
l+Δl
ᛶ᛫㧦R+ΔR
િ߫ߔ
S-ΔS
図 7.10: 歪みゲージの原理(抵抗線の伸びと抵抗値)
߭ߕߺࠥࠫ
4
࠼✢
4
'
ᛶ᛫✢
᮸⢽ࡈࠖ࡞ࡓ
4
㧔᷹ቯኻ⽎ߦធ⌕㧕
図 7.11: 歪みゲージの原理(抵抗線の伸びと抵抗値)
きる。
ΔR
Δl
K
= K
R
l
4
7.5 温度の検出
85
ここで は歪みを表し,抵抗値変化は,歪み量と比例関係となる。この比例定数 K はゲージ率とよばれる。弾
性体の場合,以下に示すように荷重 (F ) とひずみ () との関係が確定的に関係づけられるため,ひずみ量を計
測することで荷重を計測することが可能となる。このひずみを計測するものとしてひずみゲージがあり力の計
測に広く利用されている。
F ∝
ひずみゲージの構造は図 7.11 に示すように抵抗細線を配置し,ひずみ を抵抗値変化 ΔR/R として計測する。
ゲージ率は,金属線では 2 前後,半導体では 100∼200 となる。この抵抗値変化は小さいため図に示すような
ブリッジ回路(ホイストーンブリッジ)が感度良く測定するため用いられる。
ひずみゲージは温度の影響を大きく受けるため温度補償および誤差補償のため複数のゲージを測定対象物に
貼り,ブリッジの各辺に入れる使いかたが行われる。このひずみゲージは計測量への応用がある。この場合,
目的とする計測量によって構造体のひずみが発生するような構造をつくり,この時のひずみ量から目的とする
計測量を求める。図 7.12 では簡単な例として,片持ち梁の両面にひずみゲージを貼り,片持梁端部に加わった
力を計測する例を示す。また,円柱に加わるトルクの計測例として,トルクによって発生する圧縮と伸張を,
図のようにひずみゲージ4つを貼り付け,それぞれの歪みを計測することにより計測する方法を示す。このほ
か例えば,構造体に歪みゲージを貼り付け,目的とする計測量によって歪みが発生する構造を工夫することに
よって,重量,圧力,加速度,流速,粘度など各種センサへの応用がある。
ജ
߭ߕߺࠥࠫ
િᒛ
㨀
㨀
❗
િᒛ
❗
❗
િᒛ
߭ߕߺࠥࠫ
߭ߕߺࠥࠫ
図 7.12: 歪みゲージを用いた力・トルクの計測例
問題:どのような応用例があるか調べてみよ。
7.5 温度の検出
温度センサは,冷蔵庫,エアコン,電気炊飯器,レンジなどの家電製品,自動車のラジエータの水温,吸気
温の計測,化学プラントの各種溶液,気体の温度計測など様々な分野において利用されている。一般に接触式
と非接触式に分けられる。
• 接触式:直接物体に接触して測定する方式で,センサの構成が簡単で広く用いられている。
1. 白金測温抵抗体:白金の温度による抵抗変化を利用。
2. サーミスタ:半導体の温度特性を利用した半導体抵抗温度センサ
3. 熱電対:異種金属接触部に発生する熱起電力の利用(ゼーベック効果)
4. 水銀,アルコール温度計:熱膨張を利用
5. 水晶温度計:振動数の温度による変化を利用
• 非接触式:物体から放射される赤外線を測定し,その赤外線の量から物体の温度を測定する方式で,セ
ンサの構成は複雑である。
1. 放射温度計
7.5 温度の検出
86
以下ではメカトロ関連でよく利用されるサーミスタについて述べる。
7.5.1 サーミスタ (thermistor)
半導体の温度特性を利用した半導体抵抗温度センサのサーミスタは,抵抗温度変化特性の直線性が悪く測定
精度も低いが,小型で白金抵抗体の 10 倍くらい感度が良いので,温度センサとしては現在最も広く実用され
ている。サーミスタには以下の NTC,CTR と PTC の 3 種類のタイプがある。
1. NTC(negative temperature coefficient thermistor):負の温度係数を持ち,温度上昇とともに抵抗値
が減少するタイプ。各種の温度計測に用いられる。
2. PTC(positive temperature coefficient thermistor):正の温度係数を持ち,温度上昇とともに抵抗値
が増大するタイプ。温度スイッチなどに用いられる。
3. CTR(critical temperature coefficient thermistor):ある温度で内部抵抗が急変するタイプ。温度警
報スイッチなどに用いられる。
サーミスタは,温度特性を利用して,放熱状態の変化により温度変化が発生する風速センサ,流速センサ,
Ω
湿度センサなどにも利用されている。
図 7.13: サーミスタの構造と温度特性例
• 金属は温度が高いほど結晶格子の熱振動が激しくなり自由電子の移動を妨げるため,電気的抵抗値は高くなる。半
導体の場合は,温度が高くなるにつれて結晶格子に束縛されている電子が自由電子として解放されるため,電気的
抵抗値は低くなる
87
第8章
アクチュエータ
はじめに)
アクチュエータとは,図 8.1 に示すように,電源,空圧・油圧源などのエネルギーを動力源として,電気信
号等の制御信号に応じて,機械的な仕事を行う装置の総称である。アクチュエータには多くの種類があるが,
電気式アクチュエータと,油圧・空圧式アクチュエータが代表的なものである。それぞれ特長があるが,近年
では制御特性に優れ,取扱いが容易な電気式モータが多く利用される。本章では,これらアクチュエータにつ
いて説明する。
ᄌ
ᓮ
ାภ
ࠕࠢ࠴ࡘࠛ࠲
㚟േⵝ⟎
㔚᳇
ᴤ
ⓨ
ࠛࡀ࡞ࠡḮ
࿁ォ㧘ਗㅴ㧕
ജ
㧔࠻࡞ࠢផജ㧕
&%ࡕ࠲
#%ࡕ࠲
ࡄ࡞ࠬࡕ࠲
ᴤᑼࠕࠢ࠴ࡘࠛ࠲
ⓨᑼࠕࠢ࠴ࡘࠛ࠲
図 8.1: アクチュエータ
8.1 アクチュエータの種類
1. 電気式アクチュエータ: 電気と磁気との相互関係(フレミングの左手の法則)によって発生する力を
利用する。
• 位置制御,速度制御,力制御など制御性がよい
• 対環境性,保守性,信頼性がよい。
• 電子回路や計算機とのインターフェースが良好。
• 頻繁な加減速や停止に対応可能な速応性
• 高精度の位置制御
2. 油圧式アクチュエータ:エネルギー源として油圧源を用いる。
• 大パーワーが可能。
• 力/質量比,トルク/慣性比ともに大。
8.2 モータの種類
88
• システムの剛性が高い。
• 出力重量比が高い。
• 高価で保守管理の手間がかかる。
3. 空気圧式アクチュエータ:エネルギー源として圧縮空気を利用する。作動流体が圧縮性の空気であるこ
とが油圧との相違である。
• 構成が容易,低コスト,安全性。
• コンプライアンス制御が容易。
• 火災や環境汚染が少ない。
• 構成が容易で,操作性も良い。
• システム剛性が低く,高精度の位置決めが困難。
• 応答性が悪い。
講義では,各種システムへの組込例が多く,また利用方法も比較的簡便である電気式アクチュエータについて,
その種類と原理などについて説明する。
8.2 モータの種類
モータは我々の日常生活にとって非常に重要なデバイスであり,家庭用, 産業用に数多く使われている.た
とえは,洗濯機,エアコン,パソコン,携帯電話,プリンタ,DVD,時計,冷蔵庫などモータなしの家電製品
を探すのが難しいくらいである.例えば,自動車には数多くのモータが使われており国産高級車では 50∼70
個ものモータが使われている.その大きさも電車で利用される大型モータから,携帯のバイブレイタのような
長さが 10mm,直径が 4mm 程度のような小型モータまである.
᳗ਭ⏛⍹⇇⏛ဳ
DC(⋥
ᵹ)ࡕ
࠲
ࡉࠪ
ઃ߈
㔚⏛⍹⇇⏛ဳ
ࠬࡠ࠶࠻ဳ
Ḵ㋕⧌㧘ㅢᏱߩࡕ࠲
ࠬࡠ࠶࠻ࠬဳ
ࡠ࠲ᩇᒻ㧘࠻࡞ࠢࠄዊ
ࠦࠕࠬဳ
㜞ᔕ╵ᕈ㧘ዊဳൻኈᤃ㧘ૐ࠻࡞ࠢ
⋥Ꮞ߈ࡕ࠲
ᄢ߈ߥᆎേ࠻࡞ࠢ
ಽᏎ߈ࡕ࠲
ㅢᏱߩ DC ࡕ࠲․ᕈ
ⶄᏎ߈ࡕ࠲
ࡉࠪ
ߥߒ
ࡉࠪࠬ㧰㧯ࡕ࠲
ࡠ࠲࿁ォⷺᐲ⸘᷹ߒߡ⇇⏛ᓮ
ࠬ࠹࠶ࡇࡦࠣࡕ࠲
ࡄ࡞ࠬᢙߦᔕߓߚ࿁ォⷺᐲ
⺃ዉࡕ࠲(ࠗࡦ࠳࡚ࠢࠪࡦࡕ
࠲)
AC(
ᵹ)ࡕ
࠲
หᦼࡕ࠲(ࠪࡦࠢࡠ࠽ࠬࡕ
࠲)
߆ߏဳ
㋕ᔃߦ߆ߏဳߩዉࠍⵍߖߚ
Ꮞ✢ဳ
ࠦࠗ࡞㧘ᆎേ࠻࡞ࠢᓮ
PM ဳ
ࡠ࠲ࠍ᳗ਭ⏛⍹
ࠢ࠲ࡦࠬဳ
ࡠ࠲ࠍᒝ⏛ᕈ
Ꮞ߈✢ဳ
ࡠ࠲ࠍ㔚⏛⍹
ࡅࠬ࠹ࠪࠬဳ
ࡠ࠲ߦࡅࠬ࠹ࠪࠬ᧚ᢱ
࡙࠾ࡃࠨ࡞ࡕ࠲
⋥ᵹᵹਔᣇߢ࿁ォน⢻
図 8.2: モータの種類
8.3 直流(DC) モータ
89
このモータには図 8.2 に示すような種類がある.大別して直流モータと交流モータに分けられる.直流モー
タは,始動トルクが大きく,回転数の制御が容易でである長所と,ブラシを必要するものは,ノイズの発生,
磨耗の発生という短所があります.このためブラシが必要でない,ブラシレス DC モータも開発された.また
界磁を発生する方式として,永久磁石を用いるものと,電磁石を用いるものに分けられる.
交流モータは,コイルに交流電流を流すことで回転する磁界(回転磁界)を発生させ回転磁界の中に回転子
である永久磁石やコイルを用いたものである.原理上,ブラシが不要であり,保守が容易である特徴がある.
このため現在一般家庭用から産業界用に至るまで非常に幅広く利用されている.
8.3 直流(DC) モータ
近年アクチュエータとしては制御特性に優れ,取扱いが容易な電気式モータが多く利用される。この電気式
モータには,直流 (DC) モータ,交流 (AC) モータ,パルスモータ等がある。パルスモータは,小型軽量安価
な上,入力パルス数によって回転角度が制御可能でオープンループでの利用が可能である等の特徴があり,家
電製品などへ広く利用されている。しかし,負荷によって回転の位置決めが変動するなどの問題がある。直流
モータは,負荷変動に対する制御性もよく,フィードバックをかけることで位置決め精度も高いことなどから,
位置決め精度・速度を要求されることろではよく利用される。しかし,回転する電機子 (amature) に電流を供
給するための接触子であるブラシ (brush) を必要とする。このブラシは回転によって磨耗するため保守が必要
となる欠点がある。近年,この直流モータに変わり,ブラシのいらない交流モータが多く利用されだしてきて
いる。本講義ではまずその基本となる直流モータについて述べ,次に交流モータ,パルスモータ等について述
べる。
8.3.1 基本原理
直流 (DC) モータは,静止部分と回転部分から構成される。静止部分は,ステータ (stator) と呼ばれ,2個
の永久磁石によって界磁システム (field system) を構成している。回転部分は,ローター (rotor) と呼ばれ,電
流が流れる巻線からなる電機子 (アーマチャー,armature) から構成される。原理は図 8.3 に示す。2つの永
久磁石間の磁界 (B) 中にある電機子 (armature) 導線に電流 (I) が流れると,導線に力 (F ) が発生する。これ
は磁界中を運動する荷電粒子が,磁界から受けるローレンツ力による。
F = q(E + v × B)
ここで,F は荷電粒子が受ける力(これをローレンツ力と言う),E は電場,B は磁束密度(つまり磁場),q
は荷電粒子の持つ電荷,v は荷電粒子の速度,× は外積である。
ところで電流は荷電粒子が動くことによって生じる。つまり、磁界の中では電流の流れる導線にもローレンツ
力がはたらく。これは磁界の中に電流が流れると力を受けるという,フレミングの左手の法則としても有名で
ある。この力のため,電機子には回転モーメントが発生する。しかしながら,常に一定方向の回転モーメント
を発生するには電機子が回転しても,常に一定方向の電流が流れるように制御する必要があり,このためブラ
シ (brush) と整流子 (commutator) が必要となる。磁極の数によって、2極モータや3極モータ等がある。直
流モータは,電機子に加える電圧により回転速度を制御することがでる。直流モータは価格が高く,ブラシが
消耗する問題はありるが、速度コントロール性能と瞬発力に優れているため,高度な速度制御を要求される場
合に用いられている。
8.3 直流(DC) モータ
90
図 8.3: 直流(DC) モータ原理図
モータとしての動作
発生するトルク τ と電機子に流れる電流 i には以下の関係がある。
τ = KT i
(1)
τ :発生するトルク [N · m],KT :トルク定数 [N · m · A−1 ],i:電機子に流れる電流 [A]
発電機としての動作
モータには同時に発電機の効果もある。これは磁界の中を導体(この場合電機子)が動くと電流が発生する
という,フレミングの右手の法則によるものである。
E = KE ω
(2)
E :発生する逆起電力 [V ],KE :逆起電力定数,ω :モータの回転速度である。通常,KT = KE (≡ K) が成
り立つ。
発生トルクと回転速度の関係
ここで DC モータの等価回路を図 8.4 に示す。Ra は電機子抵抗であり,E は逆起電力を表している。また
V は入力電圧,i は流れる電流を表す。
V = Ra i + E(ω) = Ra i + Kω
→ ω=
V
Ra
− 2τ
K
K
(3)
式 (3) は発生トルクと回転速度の関係を表し,そのグラフを図 8.4 右に示す。図から明らかなように,回転速
度はトルクの増加に従い直線的に減少する。その勾配が小さいほど,負荷変動に対して回転速度変化が少ない
事を表すから,モータは強力といえる。式 (3) から明らかなように,入力電圧 V を下げると図のようにトル
ク・回転速度直線が傾きを保ったまま原点に近づく。即ち発生トルクと回転速度が減少することを表す。図
8.4 を,負のトルク,負の回転領域まで広げると図 8.5 となる。負のトルク領域は,モータの回転方向と逆方
向のトルクが加わった状態であり,外部からモータの回転数以上で回転させている状態を示す。これは発電機
としての動作となり,発電した電力を電源側に戻しながらブレーキをかけるので回生ブレーキ (regenerative
8.3 直流(DC) モータ
91
ω
図 8.4: 直流モータの等価回路とトルク・回転速度特性
brake) と呼ばれる。
話しが変わるがここで電車の駆動モータについて述べる。電車は昔,直流モータが一般に利用されていた。こ
こで電車にこの直流モータを取り付けた状態を考えてみよう。停止状態即ち (ω = 0) で最大トルクを発生し,
最大回転速度となるとトルクが 0 となり,電車のモータとしての相性が良い。この電車が下り坂にさしかかる
と,どうなるか?坂道で加速されモータの回転数以上で回転する状態となる。すると回生ブレーキ状態となり
モータの回転数を下げるようなメカニズムが働き,むやみに速度が上がらな。電車としてはより望ましい特性
であろう。また,入力電圧 V を下げると任意の回転数でモータがブレーキとして利用できることになる。
話しを戻す。負の角速度領域について考えてみよう。これは回転速度ゼロ,即ち停止状態で,かつ最大トルク
が発生している状態から,さらに反対回転方向にモータを回すことに相当する.するとその反対方向に回転さ
せることを妨げるようにトルクが上昇することを表している.この状態を制動機動作とする。
ω
V/K
K/Ra V
0
Τ
図 8.5: 直流モータの特性(回生ブレーキと制動ブレーキ)
8.3 直流(DC) モータ
92
KT と KE は同じ値となる?
教科書ではこの両者の値は同じとあるが,どうも納得がいかない.このため試しに実際に確認してみるこ
とにした.ある DC サーボモータ特性例をみると
• トルク定数 KT :0.0534[Nm/A]
• 逆起電力定数 KE :5.6[mV/rpm]
となっている.ここで回転角速度 ω は,[rad/s] の単位に合せる必要があるので,[rpm] から変換する.す
なわち [V/rpm] を [Vs/rad] に変更すれば両者は同じ値になるはずである.この変換は,
1[V /rpm] = 9.55[V s/rad]
(8.1)
を用いる.これを用いて計算してみると逆起電力定数 5.6[mV/rpm] は,0.0056 × 9.55=0.05348 となり,
トルク定数と同じ値になる.トルク定数と逆起電力定数は単位が違うのに同じ値になるのは大変面白い.
それとも同じ単位からなのだろうか?,残念ながらそこまでは追及していない.一方はローレンツ力,も
う一方は電磁誘導,電子の動きと,磁界の関係であることは同じなので近い関係であることには間違いな
いだろう.両者の値が一致するのは,トルク定数および逆起電力定数は,モータのコイルの寸法と磁束の
関係などから導かれ,その結果,同一のモータではこのパラメータが同じになることに由来するらしい.
また,maxson DC モータでは逆起電力定数ではなく,その逆数の回転数定数 [rpm/V] となっていた.
そこである maxson モータの,トルク定数:16.3[mNm/A,回転数定数:585[rpm/V] を計算してみと,
(1/585) × 9.55=0.01632 となり,合致した.
やはり,KT と KE は同じ数値となるようである.
8.3.2 モータの出力
出力 は以下のようになる。
P = τω = τ
V
Ra
− 2τ
K
K
(4)
P の最大値を与えるトルクは,
∂P
V
=
−2
∂τ
K
Ra
τ
K2
→
このときの角速度は (3) 式より
ωmax =
1
2
τmax
1
K
K
Ra
V
(5)
よって出力 の最大値は,
Pmax = τmax ωmax =
1
=
2
1
4
V
1
Ra
V2
(6)
となる。
8.3.3 モータの効率
図 8.6 には横軸にトルクを取り,縦軸それぞれ回転速度,出力,電流,効率をとり,直流モータの諸特性を
示す。回転速度については (3) 式,電流については (1) 式,出力については (4) 式により表せる。
ここでは DC モータの電気エネルギーから機械エネルギへの変換効率について考察する。エネルギー損失は,
8.3 直流(DC) モータ
93
1. 回転子が空気から受ける流体抵抗による損失(風損)
2. ブラシや軸受けでの摩擦による損失(機械損)
3. 回転子の鉄心内でのウズ電流損失(鉄損)
等があり図 8.6 に示すような効率曲線となる。だいたいできる限り効率よくモータを駆動さえるには無負荷回
転速度の7∼8割程度の速度で回転させればよいといわれている。
• 最大パワーは無負荷回転速度の半分
• 最大効率は無負荷回転速度の7∼8割
P I η
[W] [A] [%]
ω
a
b
c
d
Ta
T
図 8.6: 直流モータの各種特性
8.3.4 直流モータの選定
定格出力
モータを安全に使うことの限界出力を表す.モータメーカが規定時間運転してもモータに支障が生じないと
定めた出力である.定格出力は定格トルクと定格回転数によって決まる.
1. 時間定格:定格出力で正常な運転を続けられる時間.モータは使い続けると発熱し,モータの温度上昇
によって焼損する.
2. 連続定格:定格出力で正常な連続運転を続けられる時間.
3. 定格トルク:図 8.7 のように周期 t0 でトルク τ が変動するとき,以下の式で表されるトルクを定格トル
ク τ0 と呼ぶ。また定格電流 は次のように与えられる。
τ0 =
1
t0
i0 =
t0
τ (t)2 dt
(11)
0
τ0
K
(12)
8.3 直流(DC) モータ
94
τ
t
t0
図 8.7: 周期的なトルク変化から定格トルクを計算する
発熱による連続運転の制限
連続運転に伴い,電機子に流れる電流によって発熱が生じ,これによって連続運転性能の限界が定められる。
電機子に流れる2乗平均電流を im とすると,発熱量 Q は
Q = R a im
となり (1) 式を用いると
Q = Ra
2
τ02
K2
となる。許容される発熱量 Qlimit に対応する2乗平均トルクが連続して出力可能なトルクであり,これが定格
トルク τ0 である。よってモータの選定では,駆動パターンから求められる2乗平均トルクが,定格トルク τ0
以下となるモータを選択する。
イナーシャマッチング
図 8.8 のように,モータ慣性モーメント JM のサーボモータにギヤ比 γ の減速機構を介して,慣性モーメン
ト JL の負荷がつながっている機構を考える。また摩擦など外乱による負荷トルク td が加わるとする。負荷軸
側を加速度 αL で加速したい場合,モータ側の加速度は,
αM = γαL
よってモータが必要とするトルク τ は,
τ (モータの慣性体駆動トルク) +(負荷側の慣性体駆動トルク) +外乱トルク
τ JM α M +
1
(JL αL + τd )
γ
(7)
となる。ここで τ を最小とするギヤ比 γ0 は,
1
∂τ
= JM αL − 2 (JL αL + τd ) = 0
∂γ
γ
より,
γ0 =
JL αL + τd
JM α L
(8)
8.3 直流(DC) モータ
95
となる。これを最適ギヤ比と呼ぶ。(8) 式を (7) 式に代入すると,
τ2
4(JL αL + τd )αL
JM
(9)
となる。左辺はパワーレートと呼ばれモータの性能を表す指標である。なお,外乱負荷トルク がない場合には
最適ギヤ比が角加速度に無関係となる。
γ0 =
JL
JM
(10)
また,モータ軸換算でのトータル慣性モーメント は
JM α M +
JL αL
JL αM
=
= JM αM +
γ
γ2
→
となる。γ = γ0 の場合,
J = JM +
J = JM +
JL
J M + 2 αM
γ
JL
γ2
JL
= J M + JM
γ2
となり,モータと負荷の慣性モーメントが等しくなる。このようにトルクが最小となるようにギヤ比を選び,
モータと負荷の慣性モーメントを等しくすることを,イナーシャマッチングという。
ࠨࡏࡕ࠲
JM
θM
αM
NM
⽶⩄
⽶⩄࠻࡞ࠢVF
JL
θL
αL
NL
NL
ࠡࡗᲧ γ = NM
図 8.8: モータとギヤを介して接続した負荷
最大加速度の決定
モータでは負荷側の最大加速度に対応するトルクを求め,これがモータの最大トルク以下となるようなモー
タを選定する。モータ軸に換算された負荷の慣性モーメントの総和は,上式より
J = JM +
JL
γ2
となる。入力波形を図 8.9 のような台形波とする。このときモータの最大トルクは
τmax = Jα = J
ω1
t1
となる。このときモータに流れる最大瞬間電流は,
imax =
τmax
K
となる。ここでの最大トルクとは,瞬間的な性能をあらわし,連続運転に伴う発熱による使用限界については
言及していない。
8.4 交流(AC) モータ
96
ω1
࿁
ォ
ㅦ
ᐲ
ㅦᐲᵄᒻ
ᤨ㑆
t1
t2
t3
図 8.9: モータとギヤを介して接続した負荷
8.4 交流(AC) モータ
交流モータには,誘導モータと同期モータの2種類に大別できる。その原理は固定子側にコイルを作り,交
流電圧を加えることで回転磁界を発生させ,それに同期して内部の回転子コイルが回転するのを誘導モータ,
回転子として永久磁石を用いるのを同期モータと呼ばれる。AC モータは,DC モータのようなブラシは必要
なくメンテナンスフリーであるのが大きな長所となっている。本章ではこの AC モータについて解説する。
• 注):DC サーボモータは回転子側に巻線があるため整流用にカーボンブラシと銅コミュテータが必要に
なる。カーボンブラシは消耗品のため数 1000 時間で交換する必要がある。
8.4.1 回転磁界
回転磁界とは,中心軸のまわりを交流の角周波数ωで回転する磁界のことで,交流モータはこの回転磁界を
利用している。図 8.10 は,2 相の巻線によって回転磁界 Φ が発生する仕組みを示している。固定子側の励磁
巻線は直交する 2 相に分かれており,交流信号で励磁する。図では,A 相と B 相を,それぞれ 90 度位相のず
れた交流電圧 (sin 波,cos 波)で駆動し,それぞれ ΦA と ΦB の磁界が発生している状態を示す。固定巻線に
よって発生する磁界,ΦA ,ΦB はコイルに流れる電流に比例するとすると,
ΦA = Kcos(ωt),
ΦB = Ksin(ωt)
となる。A 相,B 相のコイルによって発生する磁界は図のように直交しているから合成磁界 Φ は,図 8.10 右
に示すようなベクトルとなる。
Φ = ( Φx
Φy ) = ( K cos ωt
K sin ωt )
これは大きさが K ,角度 ωt のベクトルを表し,角度が ωt と時間によって変化するベクトルとなる。即ち,角
速度 ω で回転するベクトルを表す。このように合成磁界 Φ は,交流周波数と同じ周期で回転を始める。これ
が回転磁界である。
8.4.2 同期モータ
同期モータは,図 8.10 の回転磁界の中に,図 8.11 に示すように回転子として永久磁石を配置したものであ
る。回転磁界 Φ が発生すると,それに永久磁石が引っ張られ回転磁界に同期して回転子が回転を行う。この方
式では下記の誘導モータのようなスリップが発生せず,回転磁界に同期して回転することになる。同期モータ
8.4 交流(AC) モータ
97
ω
ΦΒ
Φ
Φ
Φ
ω
ΦΑ
ω
Φ
図 8.10: 回転磁界の発生原理
は,このように無負荷時や大きな負荷を掛けた時も回転数が変わらず,電源周波数に比例した速度で回転する
ため,同期モータと呼ばれる。
図 8.11: AC モータと回転磁界
8.4.3 誘導モータ
誘導サーボモータは,回転磁界の中に回転子としてコイルを配置したものである。図 8.12 に示すように,回
転磁界の中に導体(コイル)を配置する。すると,回転磁界と導体の間に速度差が存在した場合,磁界が導体
を横切ることになり,導体に誘導電流が流れる。このため DC モータと同様(フレミングの左手の法則)の原
理により,回転子(コイル)に力が働き,回転磁界と同じ方向に回転を行う。但しこの場合,誘導電流が発生
するためには,回転子コイルが回転磁界を横切らねばならない。即ち回転磁界よりも回転子の回転速度が必ず
低い必要がある。この回転速度の差を”すべり”もしくは”スリップ”という。回転子に加わる負荷が大きくなる
ほどこのすべりが大きくなり,従って流れる電流が増加することになる。実際には同期速度よりも 2∼5 %ほ
ど遅く回転する
すべり =
同期速度 − 回転子の回転速度
同期速度
問題:以下ことについて調べる。
(1)交流電源としては3相交流が良く利用される。この3相交流とはどのようなものか
(2)3相交流によってどのように回転磁界が作れるか
(3)3相交流を用いた誘導モータとはどのようなモータか
8.5 モータ駆動回路
98
⊒↢ߔࠆജ
F
F(t+dt)
┵⛊Ⅳ
ዉ
ዉ
⺃ዉ㔚ᵹ
ࠦ ࠗ࡞
wt
࿁ォ⏛⇇
F(t)
図 8.12: 回転磁界が導体を横切ることによる誘導電流
8.4.4 ブラシレス DC モータ
DC モータでは,回転子が回転してもコイルに一定方向の電流が流れるように,整流子(ブラシ等)を必要と
した。ブラシレス DC モータでは,回転子の回転角位置をホール素子やロータリーエンコーダで検出し,角位
置に応じた回転磁界を発生するようにフィードバックする方式としたため,整流子(ブラシ等)が不要となっ
た。このタイプの AC モータは,ブラシレス DC モータと呼ばれる。ブラシレス DC モータでは,回転子は永
久磁石を用い(マグネットロータ)
,その周囲に駆動コイルを配置し、電子的な整流回路によって駆動コイルに
回転磁界を発生させる方式のモータである。AC モータの一般的な駆動方式は、正弦波の電流を与えるが、そ
れに対してブラシレス DC モータでは回転子位置に応じて台形波あるいは方形波の電流を与える駆動方式を用
いる。DC モータの良好な制御性の特徴を有するブラシレス DC モータは多くの分野で利用されている。
8.5 モータ駆動回路
モータを動かすためにはサーボアンプが必要となる。サーボアンプはモータの回転を制御するとともに,電
力を供給する。サーボアンプには DC サーボモータ駆動用の直流増幅器と,AC サーボモータ駆動用の交流増
幅器がある。
• 直流 (DC) モータの場合は,モータに加える電圧を制御することで,モータの制御が可能となる。また
この場合には大きな電流も流れるので,大電流での電圧可変型の直流電源が必要となる。
• 交流 (AC) モータの場合は,モータに加える交流すなわち,電圧と周波数とを制御することで,モータ
の制御が可能となる。またこの場合には大きな電流も流れるので,大電流での交流電圧可変型の直流電
源が必要となる。
8.5.1 電圧可変型の直流電源
直流 (DC) モータの駆動を行う直流サーボ増幅器では,コントローラからの制御信号に応じて電圧を制御し,
かつ大電流を供給する必要がある。即ち,電力の増幅を行うことになる。この増幅回路には,電力用パワート
ランジスタ,もしくはサイリスタを利用したものがある。
8.5 モータ駆動回路
99
パワートランジスタ方式
図 8.13 に示すように,パワートランジスタを用いてモータに加わる直流電圧を制御する方式である。モータ
に加わる電圧は V − VCE となる。V は一定電圧であり,ベース電流 ib を制御することでて VCE を変化させ,
モータにかかる電圧を制御する。またトランジスタにおいて電力損失 VCE · ib が発生する。トランジスタは,
高温になると壊れる。トランジスタの内部 (ジャンクション温度) ではシリコン素子で 150∼175 ℃程度とされ
ている。このため,この例のように電力損失が大きくなるトランジスタでは,発熱に対応できるよう,放熱用
フィンの装着などを行う必要がある。本制御方式は,滑らかな回転を達成できる反面,電力効率が悪くなる欠
点がある。このため小型モータの制御にしか使われない。
V
ic
ib
motor
VCE
V-VCE
E
図 8.13: パワートランジスタを用いた電圧制御
PWM(Pulse Wide Modulation) 方式
一定電圧 V の電源出力を,サイリスタ,トランジスタ等を用いた on-off 回路によってパルス状の電圧波形
とし,平滑回路を通すことによって,直流電圧を得る方式である。on-off の時間比によって平滑後の平均化電
圧が定まるため,V 以下の任意の電圧を発生させることが可能となる。パワートランジスタ方式と比較して,
電力損失がほとんど無いことが利点である。欠点としては,平滑化後の電圧にリップル等が含まれる。即ち詳
細にみると一定電圧にわずかな高周波電圧が重畳した電圧となる。
onoff
࿁〝
V
V
ᐔṖ
࿁〝
M
ᐔṖߒߚ㔚
t
図 8.14: ON-OFF 回路による電圧制御
8.6 ステッピングモータ(パルスモータ)
100
8.5.2 インバータ方式による周波数変換方式(DC → AC)
交流 (AC) モータの制御は,モータに加える交流すなわち,電力と周波数とを制御することで,その制御が
可能となる。AC モータの回転速度は,回転磁界の回転速度によるため,供給する交流電源の周波数を制御す
ることでモータ回転を制御できる。また発生トルクは供給する電力 (電流) による。このため,交流 (AC) モー
タの駆動部は,交流周波数が可変の大電力型である必要がある。このようなことから,現在はインバータ方式
が用いられている。インバータとは幾つかのスイッチング回路を組み合わせたもので,得られたパルス状の
出力波形をフィルタを通すこと等で正弦波出力を作り AC モータを駆動する。例として PWM(Pulse Width
Modulation) インバータについて示す。PWM インバータは,入力の直流電圧をパルス状にし,そのパルス
の幅を調節することで,目的の交流波形を作り出すインバータである。図 8.15 に PWM インバータの原理を
示す。
図上で信号波(正弦波)を目的の交流電力波形とする。ここで変調波として三角波を用い,信号波と変調波
を比較し,以下のように出力する。
1. 信号波>変調波”の場合”+ E”を出力
2. 信号波<変調波”の場合”− E”を出力
即ち,信号波と変調波の大小により,一定電圧の直流電圧 (± E) を ON/OFF することでパルス状の電圧波
形を作る。すると,信号波が高い電圧の部分では,三角波が高い電圧となる時間割合は少なくなり,逆に信号
波が低い電圧になるに従い,三角波が高い電圧となる時間割合は増大する。その結果の波形が図下のパルス状
の波形となる。するとパルス幅の等価電圧が正弦波形に変調された出力波形を得ることができる。但し,得ら
れたパルス波形は高調波を含むので LC フィルタ等の平滑回路を通すことで、目的の正弦波を得ることができ
る。PWM はトランジスタや GTO の採用によって実現可能となった方式である。
ାภᵄ
ᄌ⺞ᵄ
ࠠࡖࠕ㧕
'
29/ᵄᒻ
ജ
㧔ࡈࠖ࡞࠲ᓟ㧕
'
図 8.15: インバータ方式による周波数変換方式(DC → AC)
8.6 ステッピングモータ(パルスモータ)
ステッピングモータは,入力パルス数に比例した回転角度が得られるモータである。これに対して,これま
でのサーボモータでは回転角度を検出するためにモータの出力軸に回転角度を検出するエンコーダを挿入して
角度を検出していた。しかし,ステッピングモータではその必要がなく,位置決め,角度決め等の用途に対し
8.6 ステッピングモータ(パルスモータ)
101
て簡単な構成で実現できる。但し,出力側に負荷が加わると回転位置のズレを生じること,ある周波数レート
以上のパルス入力があった場合,パルス数と回転角度の関係が崩れる脱調を起こす可能性がある。前者のよう
に回転位置を検出し制御にフィードバックする方式を閉制御系(クローズドループ系)と呼ばれるのに対して,
後者を開制御系(オープンループ系)と呼ばれる。パルスモータは通常開制御系(オープンループ系)で用い
られる。
原理:その原理を図 8.16 を用いて説明する。図 8.16 は 3 相形の原理図である。固定子にはコイルが I,II,
III 相に別れて巻かれており,6 個の磁極が固定子に存在する。回転子は永久磁石製のもの(PM 型),軟鋼
製のものがある(VR 型)。図 8.17 では VR 型を示す。この図で S1,S2,S3 と順次1相づつ励磁するようにス
イッチを入れていくと,図 8.17 に示すようにスイッチの開閉に応じて,励磁されるコイルの位置が回転し,励
磁された固定子側の磁極に回転子側の鉄片凸部が吸引されていく(これは PM 型でも同様なことになる)。こ
のスイッチの開閉を順次入力パルスに応じて制御することにより,パルス入力数に応じた回転角度を得ること
が出来る。この例では, 相が励磁された時の状態を図 8.17(a) とすると, 相の励磁で回転子の凸部が 相
の磁極に吸引された状態が図 8.17(b),そして 相の励磁で回転子の凸部が 相の磁極に吸引された状態を図
8.17(c) に示す。この場合,1パルスによって 30 度づつ回転を行う。よって1回転には 12 パルス要すること
になる。
Σ
ࠦࠗ࡞
࿕ቯሶ
Υ
Τ
Υ
Σ
Τ
Τ
Σ
Υ
Τ
Σ
࿁ォሶ
㧔84ဳエ㋕╬
5
図 8.16: ステップモータ原理図
図 8.17: ステップモータの回転のようす
5
Υ
5
8.7 油圧シリンダ,モータ
102
8.7 油圧シリンダ,モータ
油圧モータは,パワー源として高圧の油圧を用いる。その動作原理はシンプルでパスカルの原理に基づく。
パスカルの原理とは,「密封した容器中に静止している液体の一部に加えた圧力は、液体のすべての部分にそ
のままの力で伝わる」というものだ
。図 8.18 を見ていただこう。断面積 S1 と S2 のシリンダが接続されている。S1 側に F1 の力が加わり,圧
力 P が発生したとする。すると,S2 の所に発生する力は次式のようになる。
F2 =
P S2
S2
F1 =
F1
P S1
S1
即ち小さな力であってもシリンダの断面積の大きさを選べば大きな力が発生できることを示している。この
図 8.18: パスカルの原理
原理を応用したものが油圧モータである。これは入力側の「案内弁」と,出力側の「油圧シリンダ」とから構
成される。入力側の断面積は小さいものを利用し,出力側は大口径のものを用いる。例えば,入力側直径が
10mm,出力側直径が 100mm とすると,その面積比は 100 となり,力は 100 倍となる。また油圧源の圧力を
100kg/cm2 とすると,出力側には 7850kgf の力が発生することになる。その動作を図 8.19 を用いて説明す
る。入力方の案内弁を右に動かすと,油圧源からの油が給油口から入り,下にある配管(ホース)を通り,油
圧シリンダの左側からピストンを右に押すことになる。その押されたピストン右側にある油は配管を通り案内
弁の戻り口から油圧源へ戻っていく。
この油圧シリンダの特性は次のようになる。案内弁の中立点(給油口を塞ぐ位置)からの動きを y[cm] とする。
ピストンの動きを z[cm],有効面積を A[cm2 ] とすると,2 つの配管を流れる油の流量 q1 [cm3 /s],q2 [cm3 /s]
は,案内弁の移動量 y[cm] にほぼ比例し,
q1 = q2 = ky
そして,シリンダに流入する油の流量 q1 [cm3 /s] によりピストンは,
v=
dz
q1
ky
=
=
dt
A
A
の速度で移動する。これらをラプラス変換を行い伝達関数を求めると,
Z
k 1
(s) = ·
Y
A s
このような案内弁を用いた方式の油圧シリンダは積分要素になることがわかる。この式に油の圧縮性,負荷の
影響を入れると 2 次遅れが加わった系となる。
以上を直動型油圧モータと呼ぶことがある。
8.7 油圧シリンダ,モータ
103
このほか歯車とか,プランジャを用いた回転型油圧モータがある。プランジャモータは、回転軸と同一方向に
プランジャが配列され、油圧によってプランジャを往復運動させ駆動軸を回転させるアキシャル形と,回転軸
に対して放射状に配列されたプランジャの往復運動を駆動軸に伝えて回転運動に変えるラジアル形がある。
油圧モータは,大パーワーが可能,剛性が高い(力を加えても変位が少ない)
,出力重量比が高い(重さ当たり
の出力が大きい)などの特色があり,建設機械など様々な分野で利用されている。欠点としては,油圧配管の
保守(清掃:フラッシング)など保守管理の手間がかかる等がある。
\
ࠪࡦ࠳ࡉࡠ࠶ࠢ
ࡇࠬ࠻ࡦ
ജゲ
ജゲ
ജ
S
S
᩺ౝᑯ
ᢳゲဳࡊࡦࠫࡖࡕ࠲
[
ๆㄟ
ᚯࠅญ
⛎ᴤญ
ᚯࠅญ
ฯ
図 8.19: 油圧モータの仕組み
104
第9章
計算機のハードウェア
はじめに
近年,情報技術 (IT) と生産技術の結合による大規模な生産性の向上が様々な分野で起こっている。また従
来経験の蓄積を必要とした金型設計など高度な専門技術が情報技術の支援により短期間で習得・利用可能と
なってきた。これらの事実は 20 世紀後半の我国の繁栄を支えたものつくり技術が大転換期にあることを示す。
すなわち 18 世紀後半における蒸気エンジンと自動機械による産業革命に比すべき,ITエンジンと生産機械
による大規模な新産業革命が現在進行している。このITエンジンの心臓部を担うのがコンピュータである。
本章では主にこのコンピュータのハードウェアについて解説を行う。
9.1 基本ハードウェア構成
コンピュータの基本は図 9.1 に示すように,データ処理を行う中央処理装置 (CPU),プログラム及びデータ
を記憶するメモリ,そしてその間をつなぐ通信路であるバスからなる。
図 9.1: コンピュータの基本構成
• CPU はコンピュータの管理と演算処理を行う。(p.106)
• メモリは,データを記憶する(プログラムもデータの一種)(p.109)
• バスは,CPU とメモリの間をつなぐ通信路(配線の束)である。(p.106)
1. メモリの中の全記憶場所にはアドレス(番地)がついている。
2. CPU は,データの読み出し/書き出しは,アドレスを用いる。
3. CPU は,プログラムの通り実行し続ける。しかし,突発・緊急事態に対して処理を行うようになって
いる。これが割り込み処理である。(p.111)
9.1 基本ハードウェア構成
105
この基本形に,図 9.2 に示すようにコンピュータへデータを入力するための入力装置,コンピュータから
データを出力するための出力装置をバスに接続したのが通常のコンピュータである。マイクロコンピュータで
もこの基本動作原理は変わらない。マイクロコンピュータを使う場合,戸惑うのはこのは入力ユニットをどの
ようにして動かすかである。方法は簡単である。実際に使う場合は入出力ユニット内部にアドレスを振られ
た,制御レジスタ,データレジスタを通して動作を行わせる。詳しくは後に示す。
• ハードディスク,キーボードなどの入出力装置もデータの出し入れを行うメモリの延長と考えられる。
よってそれぞれにアドレスを割り付けバスに接続する。
注)このようなユニバス構造でなく,専用の入出力命令で入出力装置を制御する Z80 のような CPU もある。
図 9.2: 計算機システムの構成
コンピュータ構成要素の概要
1. 中央処理装置 (CPU):CPU は主記憶装置内にあるプログラムに従いデータの加工を行う。またバスを
通して,それに接続された全ての装置の制御を行う。コンピュータの中で中心的な役割を担う装置で
ある。
2. 主記憶装置 (Main Memory):メインメモリ (MM) ともいう。メインメモリ (MM) は CPU を制御する
ためのプログラム,データを一時的に記憶する装置である。記憶単位毎に番地(アドレス)が割り当て
てあり,CPU はこのアドレスを指定することでデータの入出力を行う。
3. 補助記憶装置:MM は高速であるが高価であるため,大量のデータを記憶するためには補助記憶装置を
用いる。補助記憶装置は,二次記憶装置とも呼ばれ,磁気ディスク(ハードディスク,フロピーディス
ク)
,CD-ROM,DVD など各種の記録媒体がある。
4. 入力装置:コンピュータへデータを入力するための装置。キーボード,マウス,ディジタイザ,タッチ
パネル,イメージスキャナ,音声認識装置,画像認識装置,OCR,AD 変換器などがある。
5. 出力装置:コンピュータからデータを出力するための出力装置。ディスプレイ,プリンタ,プロッタ,
アクチュエータ,音声出力装置,DA 変換器などがある。
6. バス(BUS):CPU と各装置間のデータのやり取りを行う共通のデータ通路である。複数の導線から構
成される。バスは,データバス,アドレスバス,制御バスより構成される。また,その導線の本数をバ
ス幅として表現される。バス幅と呼ばれるのは,データ通路の幅のことで導線数のことで 16,32,64,128
等がある。例えば 32 とすると,32 本の並列に配置された導線を利用して一度に 32bit のデータの送受
信が可能となる。
9.2 ハードウェア動作の仕組み
9.2 ハードウェア動作の仕組み
図 9.3 に,その動作の仕組みがわかるようにもう少し詳しいシステム構成図を示す。図では例として,CPU
とメインメモリ,ハードディスク,キーボードが,バスを介して接続されている。まずこのバスの仕組みにつ
いて解説する。
9.2.1 バス (BUS) の仕組み
CPU は,バスを介して他の装置とのデータのやり取りを行う。各装置のデータ格納場所にはそれぞれアド
レス(番地)が付けられている。CPU はこのアドレス(番地)を介して,データの読出/格納を行うわけであ
る。このバスを介して他の装置とのデータのやり取りを行う仕組みは次のようになっている。バスとは複数の
導線が並行に存在し,電気信号を伝達するものである。通常その本数は,16,24,36,64 本が一つのまとまりに
なっている。次に,バスにはその役割として以下の3種類がある。
1. アドレスバス:アドレスを伝える。データのアドレス(番地)を伝える役割を担っている。CPU か
ら他の装置にデータの入出力を行う場合,まず CPU からアドレスバスに必要とするデータの格納場所
のアドレスをアドレスバスに伝える。例えば,アドレスバスが 16 本の導線からなるとき 216 = 64k の
番地を割り付けられる。この配線本数が多いほど一度にアクセス可能な範囲が広がるため,大きなデー
タを取り扱える。
2. データバス:データを伝える。CPU から他の装置への読み/書きするデータを伝える。例えば,デー
タバスが 16 本の導線からなるとき,一度に 2byte(16bit) のデータを読み/書きすることが可能である。
3. 制御バス:制御信号を伝える。外部装置の制御のために利用し,CPU からの入出力 (Read/Write),
すなわち CPU へのデータの入力ならば装置への Read 信号,CPU からのデータの出力ならば Write
信号を各装置へ伝える。また割り込み信号等が伝えられる。
1. CPU はデータのアドレスをアドレスバスに送り出す
2. CPU はデータの Read/Write 指令を制御バスに送り出す
3. アドレスに該当する装置は制御バスの指令信号による動作を行う
(a)Read 指令:アドレスのデータをデータバスに送る
(b)Write 指令:データバスにあるデータをアドレスにしまう
4. CPU はデータ Read 指令の場合データバスに送られたデータを取り込む
図の中のインターフェース (IF:InterFace) とは,バスと各装置とを接続する電子回路である。アドレス,デー
タのやり取りを,制御信号に応じて行う。ハードディスク,プリンタなどの装置は IF 内部にあるレジスタと
呼ばれる一時記憶メモリにアドレスが割り当てられる。入出力装置の状態を示しまたスタート/ストップ動作
などの制御を行う制御レジスタ,入出力データを一時的に記録するデータレジスタなどを介して,データの読
み書きが行われる。次に CPU の仕組みをもう少し詳しくみてみよう。
9.2.2 CPU の仕組み
CPU はメインメモリにあるプログラムを読み出し実行する。この方式をプログラム内蔵方式とよび,フォ
ンノイマンらが最初に提示したコンピュータの仕組みである。このため,このような仕組みをノイマン型コン
106
9.2 ハードウェア動作の仕組み
107
図 9.3: CPU と外部装置との接続(バス構造)
ピュータとも呼ぶ。現在のコンピュータの大半がこの方式である。この CPU の内部構造とその仕組みについ
て簡単に説明する。
内部構造
図 9.4 に,初期の CPU の内部構造概要を示す。この CPU(PDP-11) は 1970 年代に世に出たコンピュータ
で,その設計思想は以後の CPU の設計に大きな影響を与えた。以下にその構造の概要を説明する。
図 9.4: CPU の構成 (PDP-11 を例とする)
1. 算術論理演算部(AUL):データに対して算術演算(加減乗除等),論理演算(積和演算等)などの処理
を行う。CPU が行うデータ処理を司る部分である。
2. 内部レジスタ:データを一時記憶する。これは,CPU がデータ処理を行うために一時的にデータを蓄
えるために必要とする。PDP-11 では,R0∼R5 は通常のレジスタとして利用する。但し R7 は特別な
役割がありプログラムカウンタと呼ばれている。
9.2 ハードウェア動作の仕組み
3. プログラムカウンタ (PC):プログラムカウンタは,次に実行するプログラムが記憶されているメイン
メモリの番地(アドレス)を常に指し示す。非常に重要なカウンタである。
(これを書き換えることで実
行プログラムを切り替えることが可能となる)
4. 制御部:メインメモリから呼び出し命令レジスタに取り込まれたプログラム(命令コード)に従い,
ALU の演算の選択,ALU と各内部レジスタ間のデータの受け渡し,プログラムカウンタの管理などを
行う CPU の心臓部と言ってもよいだろう。
5. 内部バス:レジスタ間,ALU 等の間のデータの通り道となる。その流れは制御部によって制御される。
6. バ ス 制 御 レ ジ ス タ (BAR,BCR,BDR):外 部 バ ス と 内 部 バ ス を 接 続 す る た め の レ ジ ス タ で あ る 。
BAR(Bus Address Register) は,アドレスを保持するためのレジスタである。BDR(Bus Data Register) は,データを保持するためのレジスタである。BCR(Bus Control Register) は外部装置への制御信
号を保持するためのレジスタである。
9.2.3 命令の実行
CPU はどのようにしてプログラムを実行するのかを簡単に説明する。プログラムは命令(機械語)から構
成される。このプログラムは通常メインメモリに格納されている。CPU はこの命令を順次に読み取りその指
令を実行する。コンピュータはすごい能力をもつが個々の命令は非常に単純な機能にすぎない。CPU は次の
4 ステップを繰り返すように作られた機械である。
1. 命令取りだし (instruction fetch)
メモリから命令コードを読み出し,IR(命令レジスタ) に入れる。
2. 命令解読 (instruction decode)
IR にある命令コードを解読する
3. 命令実行 (execute)
解読した命令コードに従い,ALU,Regstor 等を使い演算処理を行う
4. 割り込みチェック (interrupt check)
CPU に対して割り込みが発生していないかを検査する。割り込みが有ればその処理を行う
PC(プログラムカウンタ)について
プログラムカウンタ (PC) は,プログラムの実行順序の制御を行う,重要なレジスタである。プログラマがソ
フトから明示的に PC の値を書き換えることで,次に実行するプログラムを指定することも可能である。通常
は,サブルーチンを呼び出す方法でプログラムの実行順序の制御を行っているが,その実この PC を書き換え
ていることに他ならない。またジャンプ命令などもこの飛ばしたい位置プログラムアドレスに PC を書き換え
ている。
割り込み処理も同様で,割り込みの種類に応じて,その処理を行うプログラムアドレスを PC に入れているこ
とである。また,サブルーチン処理終了後,メインのプログラムに戻る仕組みは,サブルーチン処理直前の PC
の値を保存し,サブルーチンから戻るときに,保存した PC の値を PC に戻すことで行っている。なんとも簡
単な仕掛けである。
PSW(Program Status Word) について
PSW は H8 では CCR と呼ばれている。プログラムの状態を示すレジスタである。直前に行った ALU の演算
結果が,ゼロ,マイナス,オーバーフロー,桁上げ,の有無をレジスタの対応するビットとして表示する。プ
ログラムで演算結果によって制御が別れる場合の判定には,必ずこのレジスタを参照している。C 言語では直
108
9.3 主記憶装置(M ain M emory)
接読みに行くことはほぼない。
ı
9.3 主記憶装置(M ain M emory)
メインメモリ(MM) とも呼ばれる。データやプログラムを格納する装置である。MM は多数のメモリセル
(単位)から構成されている。この1つのメモリセルは0か1のどちらかの状態を取る。このことを1ビット
(bit) の容量と呼び,記憶容量の最小値である。MM ではこのメモリセルを8つ集めた単位をバイト (byte) と
呼び,そのバイトを幾つか集めた単位をワード (word) と呼ぶ。何 byte を 1 word とするかは,コンピュータ
の設計思想による。
1. バイト (byte):8bit のことを示す
2. ワード (word):主記憶への読み/書きを,まとめて行う byte 数単位。2,4,8 バイトなど。コンピュータ
のアーキテェクチャに依存する。
メインメモリ(MM) にデータを読み書きするには時間がかかる。この時間はアクセスタイムと呼ばれる。
CPU のサイクルタイムよりアクセスタイムが大きいことは,CPU の命令実行時間より,命令を呼び出す時間
がより長くかかることになり,その間 CPU が待つことになる。これは CPU の効率を下げることになるので
キャッシュメモリを設けるなど各種の工夫が行われている。
9.3.1 メモリ装置の種類
1. 半導体メモリ (IC メモリ):半導体メモリとして,読み書き可能な RAM と,読み出しのみの ROM が
ある。
(a)RAM:随時読み出し書き込み記憶(任意の番地にいつでも同じ時間でアクセス可能)
(b)DRAM:コンデンサを用い電荷の有る無しで記憶。トランジスタ一個で構成,小型,リフレッシュ
必要
(c)SRAM:フリップフロップを用いる。数個のトランジスタで構成,リフレッシュ不必要
(任意の番地にいつでも同じ時間でアクセス可能) 利
(d)ROM:読み出し専用記憶(書き込みは不可)
用例)漢字のドットパターン,IPL(Initial Program Loader) など
2. 回転型メモリ(磁気ディスク装置など)磁気ディスク(ハードディスク),光磁気ディスク (MO
640MB-1.3GB),DVD-RAM (2.6GB-9.4GB) ,zip(100MB), jaz(1GB) などがある。
9.3.2 メモリ装置の分類
1. 保存性:電源断によるメモリ内容が保持されるか否か
(a)揮発性:電源断で記憶内容消去。RAM
(b)不揮発性:電源断で記憶内容保持。ROM,磁気メモリなど
2. 読み書きの可能性:
(a)リードライトメモリ:読み書き可能(RAM)
(b)リードオンリメモリ:読み出し専用(ROM)
3. アクセス機構:
(a)逐次アクセス:格納順にアクセス可能。磁気テープ等。
109
9.4 補助記憶装置
110
(b)ランダムアクセス:アドレスによりどのメモリセルからも選択可能。ICメモリ,磁気ディスク。
9.3.3 メモリ装置の性能
1. 容量:データを記録できる大きさ。単位はバイト (B: Byte)。
2. アクセス時間:要求を出してからメモリ内データにアクセスするまでに要する時間
3. サイクル時間:連続して可能なアクセスの最小時間間隔。
9.3.4 メモリ階層
コンピュータに,高速で大量のメモリ装置があるほうがよいことは明白であろう。しかし,メインメモリ
(MM) は高速であるがビット当たりの価格が高く,電源を切ると記憶内容の消失する。また磁気記録装置は,
高速ではないが大量のデータ記憶が可能で,電源を切ってもデータが保存される。CPU から頻繁にアクセス
があるメインメモリには出来る限り高速のメモリを,大量のデータを記憶するメモリには高速性よりも記録密
度が高く安価で不揮発性であるメモリを選ぶ方が良い。このようにメモリは,記憶容量,アクセス時間,価格,
保存性による使い分けが行われている。このようにして,メモリ装置特徴のトレードオフに基づきメモリを階
層化したものがメモリ階層と呼ばれる。
メモリ階層:CPU 内部の高速レジスタ→キャッシュメモリ→メインメモリ→補助メモリ
表 9.1: メモリの階層構造
項目
制御メモリ
キャッシュ
メインメモリ
補助メモリ
容量 (byte)
数百∼1K
128K∼1M
素百 M∼数 G
数 G∼
速度 (sec)
数n
数n
数十 n
数十 m
素子
価格 速度 容量
小
↓
↓
磁気ディスク 安価 低速 大
ECL
高価 高速
ECL/SRAM ↓
↓
DRAM
↓
↓
9.4 補助記憶装置
メインメモリ(MM) は高速であるがビット当たりの価格が高いため,大量のデータ記憶には補助記憶装置
が用いられる。ここでは,代表的な補助記憶装置であるハードディスク (HD) について説明する。
図 9.5: ハードディスク装置の概念図
9.5 割り込みの機能
9.4.1 ハードディスク
図 9.5 にハードディスクの構造の概念図を示す。磁性体を塗布したアルミニウムやガラスのディスクを何枚
も重ね合わせた構造になっており,これをモーターで高速に回転させて磁気ヘッドを近づけてデータを読み書
きする。データの読み書き(READ/WRITE)は,ブロック単位 (512, 1024 Byte 等)で行われる。データの
記録を行う部分は,トラック,セクタ,表裏面に区分けされている。トラックとは,ディスクの半径方向に同
心円状に作成された部分である。セクタはディスク面を角度方向に等分した部分である。またディスクは両面
記録が可能である。よってハードディスク上のデータを指定するためには,1) トラック番号,2) 磁気ヘッド番
号,3) セクタ番号,を指示することで目的とするデータの読み書きが可能となる。次に一般的ハードディスク
の一例(IDE 方式。現在では旧型に属する)について最大記憶容量を求めてみる。この方式では,トラック番
号,ヘッド番号,セクタ番号は以下のようになっている。
例)IDE:アドレス=(トラック番号,ヘッド番号,セクタ番号)
10bit 4bit 6bit
トラック番号が 10bit と言うことは,半径方向に 210 ,即ち 1024 個にトラックが作成可能で,このためトラッ
クを区別するのに 10bit 必要とすることを意味する。この他,ヘッドに 4bit,セクタに 6bit を必要とすること
から合計で 20bit のアドレスを割り付けられることになる。即ち,ブロック単位に対して最大 20bit のアドレ
スを割り当てることが出来ることから,ブロック単位を最大で 220 個まで作成できることになる。PC/AT 互
換機の場合,1block = 512(29 )byte であるため,この場合最大容量は,229 byte = 512M B となる。次に,新
しくなった E-IDE 方式について述べる。
例)E-IDE:アドレス=(トラック番号,ヘッド番号,セクタ番号)
14bit 4bit 6bit
であるから,ブロック単位に対して最大 24bit のアドレスを割り当てることが出来ることから,ブロック単位
を最大で 224 個まで作成できる。よって最大記憶容量は 233 byte 8GB となる。
次に,読み出す速さについて述べる。ハードディスクからデータを呼び出す時間はアクセス時間とシーク時
間の和となる。例として,磁気ディスクの回転速度が 3600rpm,平均シーク時間を 10ms 程度とする。デー
タが書き込まれたディスク領域がヘッドまで回転するのに必要な待ち時間は,3600rpm → 16ms/rev とな
り,平均待ち時間を半回転とすると回転待ち時間平均 8ms となる。よって”シーク動作+回転待ち時間”
は”10+8=18ms”,最大で”10+16=26ms ”となる。
1. アクセス時間:ディスク回転による時間。
2. シーク時間:磁気ヘッドの位置決めによる時間。
• ハードディスクにおける割り込み処理
ハードディスクへ READ/WRITE 指令を出してから,実際に作業が終了するまでは時間がかかる。
よって,その間の時間 CPU は他の処理を行い,ハードディスクの READ/WRITE 作業が終わった時
に,ハードディスクから CPU に割り込みをかけ,作業終了を伝えることが一般的である。
9.5 割り込みの機能
割り込みとは,CPU が実行中の計算処理を一時中断し、新たに発生した処理が必要な仕事を優先して、そ
の仕事のための処理を行なわせる機能である。図 9.6 には割り込み処理の概念について示す。これは通常処理
の実行中に,外部 I/O 装置から処理要求が発生し,通常処理の実行を一時中断して新たに発生した処理要求を
111
9.5 割り込みの機能
112
行っている。
図 9.6: 割り込み処理について
9.5.1 割り込み処理を用いる目的
すでに 9.2.3 節で述べたように,CPU はプログラムを実行するよう作られた電気回路であり,与えられたプ
ログラム以外の動作は行わない。しかし,印刷中の紙切れ,インク切れ,リセットボタンが押された,プログ
ラム実行時のエラー,そしてある時間毎に強制的に実行プログラムを切り替えるなど,多くの突発的な事態が
発生する。コンピュータはこれらの事態が発生した場合,適切な処理を行うことが求められている。すると,
これらいつ発生するかわからない突発的な事態に対応するためには,コンピュータはどのようにすればよいで
あろうか?
その方法の一つは,1) これら多くの突発的事態を想定し,CPU が常にその事態が否かをチェックに行く方法
がある。2) もう一つは突発的事態自らが CPU に通知を行う仕組みを作り,その通知に基づき処理を行う方法
である。割り込み処理とは,この後者の方法である。このような手段を取ることによって,CPU の効率的な
運用が可能になる。
1. 同時に走っている複数のユーザプログラムの切り替えのため
2. 外部事象の発生による緊急/優先処理のため
3. 外部装置の入出力においてその完了等を知らせるため
割り込み処理の例
キーボードは,人間が操作を行い,押される回数は 1 秒間に 10 回が精々であろう。よって,1 秒間に 106 回
もの動作を行う CPU からすると非常にまれな事象の発生となる。よって,常にキーボードが押されたかを
チェックするのではなく,押された場合に割り込みが発生し,割り込み処理が実行される方がより効率的な
CPU の利用がはかれる。このような割り込み処理は,プリンタの紙切れ,ハードディスクへの書き込み終了
などから,プログラムの実行エラー,故障検知など数多くの場合がある。
9.5.2 割り込み処理の方法
割り込みは,各入出力ユニットからの割り込み要求信号に基づき,CPU は割り込み処理を行う。 例えば
キーボードの場合を考える。図 9.3 に示すようにキーボードはバスを通して CPU に接続している。キーボー
ドが押されると,その制御回路 (IF) からバスを通して CPU に割り込み信号を送る。CPU はこの信号が来る
と”割り込み”と判断して割り込み処理を行う。
• 各ユニットは,割り込み要求を行う/否かの設定を行う必要がある。その設定は各入出力ユニットの制
御レジスタの定められたビットの ON/OFF で行う。
• CPU は,割り込み要求の許可/禁止を指定できる。
よって,割り込み処理を行う場合,割り込み要求を行うユニットの要求を ON とすること,CPU 側の割り込み
要求を OK とすること,この2つの事を設定する必要がある。設定は関係するレジスタの対応する bit を ON
9.5 割り込みの機能
113
とする。このことは忘れやすいので注意が必要である。。またある装置の割り込み処理を行っている時に他の
装置かからの割り込みを禁止したい場合に CPU 側で割り込み禁止処理を行え有るのは便利である。
割り込みの優先順位
また割り込みには優先順位がある。例えば H8 では IRQ 割り込みがあり,IRQ0∼IRQ5 までの 6 本の割り込
み信号線がある。即ちハードウエア的にレベルが決まっている事を示す。CPU 側は,この 6 つのレベルおの
おの個別にその割り込み許可/禁止を専用のレジスタによって制御出来る。このようなレベル分けを行うこと
で,より順位の低い−即ち処理を急がない−割り込み要求は無視して,順位の高い−即ち処理を急ぐ−−割り
込み要求は優先的に,処理を行えることが可能となる。
割り込み処理(割り込みベクトル方式)
では実際にどのようにして割り込み処理を行うのかを述べる。割り込み処理方式は大別して以下の2つが
ある。
1. ポーリング: 全てのユニットに対して,割り込み要求が有るか否かのチェックを行う。処理は遅いが
ハードは簡単。
2. 割り込みベクトル:割り込み要求を起こしたユニットは割り込み処理プログラムアドレスを示すベクタア
ドレスを送る。処理は早いがハードは規模大
H8 では後者の割り込みベクトルを利用している。これは次のような方法を用いている。
1. 割り込み処理を行うプログラムの先頭アドレスを表にする。表はベクタテーブルと呼ばれメインメモリ
内に,その表が作られる。例えば,表 9.2 には IRQ0∼IRQ5 の例を示す。
2. 割り込みが起こると割り込み要因に対応する表のベクタアドレスの内容(処理プログラム先頭アドレス)
が PC に書き込まれる。するとその処理プログラムが実行されることになる。
表 9.2: 割り込みベクタテーブル一部の例
割り込み要因
IRQ0 IRQ1 ·· IRQ5 ベクタアドレス その内容
0x0030∼0x0033 IRQ0 割り込み要求に対する処理プログラム先頭アドレス
0x0034∼0x0037 IRQ1 割り込み要求に対する処理プログラム先頭アドレス
· · · ∼· · ·
0x0044∼0x0047 IRQ5 割り込み要求に対する処理プログラム先頭アドレス
9.5.3 <参考>割り込みの種類
1. CPU 内部で発生する割り込み
主として CPU の内部処理に係わる割り込み。
(a)リセット(ボタン)
(b)ハード故障検知
(c)命令実行例外(ゼロ除算,オーバフロ, メモリアクセス例外等)
(d)トラップ (trap):プログラム割り込みやブレークポイントなど内部割り込みを発生させるマシン命
令の実行による。
(e)SVC(Super Visor Call)
2. CPU 外部で発生する割り込み
主として入出力装置(タイマ,コンソール,磁気ディスク等)からの動作完了/異常検知等に基づく割
り込み。
9.6 コンピュータの基本ソフトウェア構成
114
(a)割り込み通知:処理を必要とする装置から,バスを介し CPU へ割り込み要求信号をおくる。
(b)割り込み要因の識別:CPU は割り込み信号に基づき,割り込み要求装置を判別する(割り込みベ
クタ、割り込み番号、IRQ 番号などが関係する)
(c)割り込み要因毎の処理:割り込み要求装置に応じた処理を行う
i. 現在行っているプログラム処理を退避
ii. 割り込み処理を行うプログラムをロード
iii. 割り込み処理プログラムの実行
iv. 処理終了後,退避したプログラムを復活
(d)割り込みを起こした時点での通常のステップに戻る。
9.6 コンピュータの基本ソフトウェア構成
コンピュータはハードウェアで実現される機能と,ソフトウェアによって実現される機能がある。我々が,
コンピュータを使い,ワープロで文章を作成するとき,インターネットで情報を検索する時,このハードウェ
アとソフトウェアの機能が合わさって働くことからコンピュータは有用な機能を発揮する。図 9.7 はこのハー
ドウェアとソフトウェアの関係を表している。アプリケーションプログラムは,特定の業務を目的に作られた
もので,ワープロ,表計算,電子メールなど多数のプルグラムがある。この中のシステムプログラムとは,ア
プリケーションプログラムとハードウェアをつなぐ役割をするもので,オペレーションシステム(OS)はこ
の中に含まれる。これ以外にはコンパイラ,アセンブラ,リンカ,エディタ等があり,また人間とコンピュー
タのインターフェースを担当するプログラムも含まれる。
9.6.1 オペレーションシステム(OS)
OSはコンピュータを効率的に利用するために考え出されたプログラムでコンピュータ全体の動作を管理す
るものである。Windows2000, WindowsXP, UNIX, Linux, OSX 等呼ばれているものはこのOSにあたる。
OSは,タスク管理,メモリ管理,入出力管理,ファイル管理などを行っている。
9.6.2 機械語プログラムとアセンブり言語
コンピュータが理解できるのは機械語といわれる,
”0”と”1”の集まりからできた機械語プログラムと呼
ばれるものである。コンピュータ初期のプログラム制作者はこの機械語命令を直接作成してコンピュータに仕
事を行わせていた。この機械語命令は限られた種類の命令しかなく,まとまった意味のある仕事を行わせるた
めには,膨大な数の命令を実行する必要があり,人力で間違いなく入力するためには大変な苦労があった。こ
のため機械語より人間にわかりやすい言語として開発されたものがアセンブリ言語と呼ばれるものである。例
えば,機械語とアセンブリ言語を併記してみる。
機械語
【アセンブラ言語】
0110000000000001 →
ADD R0,R1
その内容
Regstor0 + Regstor1 → Regstor1
この命令は,レジスタ0とレジスタ1の内容を加算し,それをレジスタ1に格納せよという命令である。こ
のようにアセンブリ言語は機械語と一対一に対応し,かつ人間に分かり易い形にしたものである。アセンブラ
とは,このアセンブリ言語を機械語命令に変換してくれるプログラムのことである。
9.7 ハードウェアとソフトウェアのトレードオフ
図 9.7: コンピュータの基本ソフトウェア構成
115
図 9.8: アプリケーションとハードウェ
アをつなぐコンピュータ言語
9.6.3 高水準言語とコンパイラ
多くのアプリケーションプログラムは膨大な行数のプログラムによって作られている。開発言語としてのア
センブリ言語は機械語に近い言語であるため,高度な処理を行うには多くのアセンブリ命令を組み合わせて使
う必要がある。また,アセンブリ言語は CPU によって異なりコンピュータの違いにより動作しない場合があ
る。このような事態は多くのアプリケーションプログラムにとっては,望ましくない。このため,CPU に依
存しない言語として高水準言語がプログラム開発に利用される。また高水準言語は,人間の思考にアセンブ
ラ言語より近く,高機能な命令も利用できるため,プログラム作成が容易になる利点がある。このため,ほ
とんどのアプリケーションプログラムは高水準言語を用いて作成されている。高水準言語としては,C 言語,
PASCAL,FORTRAN 等がある。しかしながら,CPU は機械語のみで動作可能であるため,高水準言語を
機械語に変換する必要がある。この役割を行うのがコンパイラとよばれるものである。直接機械語に変換する
ものと一度アセンブラ言語に変換するものがある。図 9.8 にアプリケーションとハードウェアをつなぐコン
ピュータ言語の関係を示す。
9.7 ハードウェアとソフトウェアのトレードオフ
コンピュータシステムの構築において,ハードウェアの高速処理と,ソフトウェアによる柔軟な問題処理の
バランスについて適切に決める必要がある。大きな流れとして,CISC と RISC がある。前者は,複雑な演算
処理を出来るだけハードウェアによって処理を行い,計算機の性能を向上させようとする方法であり,ハー
ドウェアと言語(ソフト)の間のギャップをハードウェア側から狭める試みである。これは CISC(Complex
Instruction Set Computer) と呼ばれている。後者の方法は,ハードウェアによる処理可能な演算命令を少な
くすることで出来るだけハードウェアを簡単にして,ハードウェアの処理速度を速め,ソフトウェアによって
処理を行う方式である。これは RISC(Reduced Instruction Set Computer) と呼ばれる。
1. CISC (Complex Instruction Set Computer) より強力な命令セットをハードウェアで実現させる方法。
例えば乗算命令を一つの命令セットして実行する。高速な実行が可能な反面,ハードウェアが複雑にな
る。その結果,設計試作が難しくなる。
2. RISC(Reduced Instruction Set Computer) 簡単な命令セットを高速に実行出来るようにハードウェア
をシンプルに設計し,動作周波数を高くする。設計試作が簡単で開発が短期間となる。その反面,機能
をソフトウェア的に処理するためプログラムが一般的に長くなる。
図 9.9: CPU の設計方針:CISC と RISC について
116
第 10 章
コンピュータにおける数表現
コンピュータにおける数表現
コンピュータは,データを”0”,”1”の値として処理を行っている。それでは,数値,文字等をどのようにし
てコンピュータは,この”0”,”1”の集まりから判別しているのだろか。この章では,コンピュータにおける数
値,文字等の表現方式について学ぶ。この表現方式はコンピュータの仕組みを理解する上では必要不可欠なも
のである。
10.1 ビットとバイト
計算機内部での”0”,”1”の集まり単位として,ビット (bit) とバイト (byte) がある。
1. ビット (bit) とは,”0 or 1”のどちらかの1つのもの
2. バイト (byte) とは,ビットが8つ集まったもの
10.2 数値表現
コンピュータ内部では数値は2進数表現で行われる。この数値の表し方は主に2つの方式がある。これは,
整数表現と浮動小数点表現とである。これは,10 進数で 123 を表現する場合”123”と表す方法と,”1.23E+2”
と表す方法があることと同じである。前者が整数表現で,後者が浮動小数点表現である。(注:この他固定小
数点表現がある)
10.2.1 整数表現
コンピュータ内部で数値を整数表現で扱う場合,ビット数を指定する必要がある。通常,8bit, 16bit, 32bit
のいずれかを用いる。これは,1byte, 2byte, 4byte と表現することの方が多い。ビット数と数の表現とはどの
ような関係があるのだろうか。例えばコンピュータ内部で整数表現を 8bit とする。すると正の整数と考える
と,”28 = 256 から,0∼255 までの数値を表現することが出来ることになる。このとき問題になるのが負の数
をどのように表現するかである。いくつかの方法があるが,コンピュータでは通常補数表現が用いられる。以
下にはこの補数表現について説明する。
10.2 数値表現
117
10.2.2 補数表現
補数 (complement) とは負の数を表現する一つの手法である。補数表現では 1) 数の引き算は補数の加算で
行うことができる,2) 論理素子を用いて簡単に作成できる,などコンピュータ処理するときには有利な点で
ある。2 進の補数は以下のように作れる。(注:”2”のところが”r”に変われば r 進の補数表現になりる) ここ
で”x”を 2 進数とし,n を桁数とする。するとこの補数は以下のようになる。
”x”の補数= 2n -x
表 10.1 では,2 進数 4 桁の場合の補数表現を示す。補数は 2 進法のみでなく任意の r 進法の補数表現も可能で
ある。以下に例として 2 進法と 10 進法の補数と補数を用いた計算を示す。
表 10.1: 2 進数 4 桁の場合の補数表現
-8
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
1000 1001 1010 1011 1100 1101 1110 1111 0000 0001 0010 0011 0100 0101 0110 0111
1. 補数
(a)2 進法 4 桁の場合:”0011”の 2 の補数は,24 -0011=10000-0011=1101
(b)10 進法 2 桁の場合:”38”の 10 の補数は,102 -38=100-38=62
2. 計算
(a)2 進数 (5-3=2) の計算例: 0101-0011=0110+1101=(1)0010 (5 桁目は無視)
(b)10 進数 (85-38=47) の計算例: 85-38=85+62=(1)47 (3 桁目は無視)
ここで 2 進法の簡単な補数の作り方を示す。この方法は論理回路で簡単に実現できることから,実際のコン
ピュータでもこのような方法で 2 進法の補数を作っている。
1. 2 の補数の作り方 (例は数字 3 の補数を作る。2 進で 4 桁とする。任意桁数でも方法は同じ)
(a)2 進数で 3 を 4 桁で表現:”0011”
(b)2 進数の全 bit を反転:”0011” → ”1100”
(c)それに”1”を加える:”1100” → ”1101”
10.2.3 2進補数表現での数の表現範囲
コンピュータの内部での整数表現のとき,2 進数で正負の範囲を表すことが一般的である。しかしながら,
大きな整数範囲のみの値を取り扱いたいとき,また数値ではなくビットのパターンとして利用したいときなど,
正の範囲表現のみと宣言した方がよい。これはプログラム作成上分かり易いこと,また I/O 入出力制御などの
場合,処理もビット毎の処理となることが多いので取り扱いが便利である等の理由がある。このように場合に
よって整数の数表現を使い分けることが必要になる。
1. 符号付き (signed):正負の範囲を表現する
2. 符号なし (unsigned):正範囲のみを表現する
10.3 2進データの表記法
118
表 10.2: 2進補数表現での数の表現範囲
byte 数
1
2
4
正負範囲(signed)
-128 ∼127
-32768 ∼32767
-2147483648∼2147483647
正範囲(unsigned)
0 ∼255
0∼65535
0∼4294967295
10.2.4 浮動小数点数表現
大きな範囲の数値を表現する場合に用いられる。また整数と異なり実数を表現することに利用される。浮動
小数点数表現は,”仮数部”と”指数部”によって表現される。例えば,10 進数の例では,”1.23E+2”の”1.23”が
仮数部で,”E+2=102 ”が指数部となる。このとき精度と数値範囲のトレードオフがある。(仮数部→精度,指
数部→範囲)
1. 浮動小数点表現:計算機内部での数表現。2 進数の浮動小数点数 R は以下のように表現される。
(R)2 = m x 2e • m:仮数部 (mantissa).純小数または整数.長さ固定.
• e:指数部 (exponent).整数.長さ固定.
2. 浮動小数点数表現形式の例: 変換方法の詳細説明は省き,その結果のみを以下に示す。
例)-0.75 を IEEE 規格で表す。
(a)0.75 を 2 進数で表現: 0.75 → 0.11 (0.11 = 2−1 + 2−2 )
(b)正規化と隠しビット表現:0.1 x 2−1 (最下位ビットは常に 1 のため省略)
(c)指数部: 127(バイアス値)+ (-1) = 126 → 01111110
(d)仮数部: 1 → 10000000000000000000000 (0 が 22 個)
(e)符号部: 1(負)
符号
1
表 10.3: -0.75 の浮動小数点表現
指数
仮数
01111110
10000000000000000000000
10.3 2進データの表記法
プ ロ グ ラ ム 作 成 す る 場 合 ,デ ー タ を ビ ッ ト の 集 合 で 表 現 す る こ と が 多 く あ る 。例 え ば 8bit デ ー タ
を”10100011”のように記述する場合である。しかしこのような記述は,わかりにくい,ビット数が増え
た場合表記が大変で間違いやすい等の問題がある。そこで 16 進表現による2進データの表記法がよく利用さ
れている。16 進表現とは 2 進の 4 ビット毎にまとめて記述する。2 進の 4bit では正の整数として 0∼15 まで
の整数が表現可能である。この 0∼15 の整数で,0∼9 までは 10 進表現の”0∼9”を用いて,10 → A,11 → B,
12 → C,13 → D,14 → E,15 → F と対応させて表現する方法である。表 10.4 の 4 桁の 2 進数と 16 進数表
現の関係を示す。
1. ”10100011”→-”1010 0011” →”A3”となる
2. ”1011011111110011”→”1011 0111 1111 0011”→”B7F3”となる
3. これを 16 進表現であることを,明記するため,数値の先頭に”0x”をつける。
10.4 文字(記号)表現
119
4. ”10100011”→”0xA3”となる
5. ”1011011111110011”→”0xB7F3”となる
<参考> 16 進数の表現方法
16 進数の表現方法は,マイコンの種類,コンパイラによって異なる。例えば,以下の表記は同じものである。
ちなみに”H”は Hexadecimal の事を示す。
1. H8 系 :H’B7F3
2. 68 系 :B7F3$
3. 80 系 :B7F3H
またプログラム内では 16 進数は,先頭に 0x をつけ,0xb7f3(小文字)と表すのが慣例である。
表 10.4: 16 進表現
数 2 進表現 16 進表現 数 2 進表現 16 進表現
0
1
2
3
4
5
6
7
0000
0001
0010
0011
0100
0101
0110
0111
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
0100
0101
1010
1011
1100
1101
1110
1111
8
9
A
B
C
D
E
F
10.4 文字(記号)表現
コンピュータは数値計算を行うのみでなく,文字等記号を用いた処理も行える。この記号もやはり”0”,”1”
の集まりとして表現している。このときにどの記号にどのような”0”,”1”のパターンを対応させるかを決めた
ものが符号(コード CODE) と呼ばれるものである。計算機の中で文字等記号を表現するコードが決められ
ている。以下にその代表的な例を示す。
1. ISO(International Standard Organization) コード
(a)ASCII(American Standard Code for Information Interchange アスキー):英大小文字、数字、
特殊文字 (96 文字)、制御文字 (32 文字) の合計 128 文字からなる。通信用として考案されたもので
あり,7bit を用いて表現する。表 10.5 に ISO コード表を示す。
(b)JIS コード:ASCII に準拠。我が国では 8bit 目も活用してカタカナを割り当て使う場合も多い。
(c)EBCDIC(Extended Binary Coded Decimal Interchange Code エビシディック):8bit コード。
計算機内部での文字表現に使用する目的で考案された。
2. 日本語の文字コード:漢字を 1byte で表現することは不可能のため,2byte(216 = 65536) で表現する。
このため以下の方法がある。
(a)標準 JIS 漢字コード:日本語文字コードも 7bit のデータ 2 つで表す方式。これは ASCII コード
の影響で7 bit を想定した通信への利用があり,それにも対応可能としたため。このとき,ASCII
コードと日本語文字コードの区別のため,切り替えを示すための制御文字列(エスケープシーケン
ス)が必要となる。
10.4 文字(記号)表現
120
(b)拡張 JIS 漢字コード:日本語文字コードはすべて最上位1 bit を1として表す。このとき1 byte
のカタカナコード(半角カナ)との衝突が問題となる。これに対して,半角カナ文字コードの前に
特殊な制御文字列を入れることで対応させる。
(c)シフト JIS 漢字コード:半角カナとの衝突を避け,しかも2 byte の最初の1 byte 最上位 bit を 1
にしてエスケープシーケンスを不要にしたものである。パソコンを中心に広く利用されている。
3. この他
(a)EUC(extended UNIX code):UNIX 分野で主流の文字コードである。
(b)Unicode:16/32bit 系コードで全世界文字表記することを計画したコード。1985 年頃から米国を
中心に提案され始めた。
i. USC2(universal character set coded in 2 byte):
ii. USC4(universal character set coded in 4 byte):
表 10.5: ISO コード(JIS コード)
上位ビット→ 0
1
2
3
4
5
6
7
下位ビット↓ (000) (001) (010) (011) (100) (101) (110) (111)
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
NUL
SOH
STX
ETX
EOT
ENQ
ACK
BEL
BS
HT
LF
VT
FF
CR
SO
SI
DLE SP
DC1
!
DC2 ”
DC3 #
DC4 $
NAC %
SYN &
ETB ’
CAN (
EM
)
SUB *
ESC +
FS
,
GS
RS
.
US
/
0
1
2
3
4
5
6
7
8
9
:
;
<
=
>
?
@
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
V
W
X
Y
Z
[
\
]
ˆ
‘
a
b
c
d
e
f
g
h
i
j
k
l
m
n
o
p
q
r
s
t
u
v
w
x
y
z
{
|
}
˜
DEL
10.4 文字(記号)表現
121
表 10.6: 制御符号
NUL ヌル (空文字)
SOH ヘディング開始
STX テキスト開始
ETX テキスト終了
EOT 伝送終了
ENQ 問い合わせ
ACK 肯定応答
BEL ベル
BS バックスペース
HT 水平タブ
LF 改行
VT 垂直タブ
FF 改ページ
CR 復帰
SO シフトアウト
SI シフトイン
SP (半角) スペース
DLE データリンクでの拡張
DC1 制御装置 1
DC2 制御装置 2
DC3 制御装置 3
DC4 制御装置 4
NAC 否定応答
SYN 同期文字
ETB 伝送ブロック終了
CAN 取消
EM 媒体終端
SUB Substitute Character
ESC (制御コード) 拡張
FS ファイルセパレータ
GS グループセパレータ
RS レコードセパレータ
US ユニットセパレータ
DEL 削除
122
第 11 章
コンピュータネットワーク
はじめに
今日ネットワークは,WWW による情報発信と収集,電子メールによる情報交換など,我々の日常生活及
び仕事に対して必要不可欠のものになっている。このような状況の中で,コンピュータは,データ処理と通信
機能を行う器機としての使われ方をしており,ネットワークに接続されていないコンピュータ即ち通信機能の
ないコンピュータは,その有用性を大きく損なってしまいる。また近未来的には,IC タグ等の普及により,す
べての器機に判別番号(IP アドレス)が付いた世の中が出現し,研究者,技術者にとってネットワークの知識
はコンピュータの知識同様必要不可欠なものになることが予測される。本講義では,このネットワークについ
てその基礎の基礎というべき事項について解説を行うことにする。
11.1 ネットワーク
現在のところ,コンピュータを接続する LAN(Local Area Network) としては,ほとんどがイーサーネッ
ト (Ethernet) と呼ばれるものである。これは,もともと 1970 年代に米 Xerox 社のパロアルト研究所で開発
されたネットワークシステムで, 米国のゼックス,DEC 等が 1980 年に共同開発したバス構造の LAN がそ
の始まりである。現状では,このイーサーネットにはいくつかの種類がありわかりにくいが,10BESE-T や
100BESE-T 等がよく使われる方式である。このイーサーネットは,ケーブルの形状,コネクタの種類,信号
の伝送手順,信号の解釈の仕方,など様々な約束事から成り立っている。例えはイーサーネットは,データ・
リンク制御手順は CSMA/CD 方式を使い,ネットワーク層のプロトコルである IP と,トランスポート層の
プロトコル TCP を用いた TCP/IP プロトコルを使ってデータ転送を送る方式である。本解説ではこのような
LAN を理解する事目的に,イーサネットを中心に解説する。
11.2 データ伝送と伝送速度
ネットワーク上に流れるデータは全てディジタルデータで,0,1 の2進数の bit 列で表現されている。図
11.1 では例として,”01011010”のデータを送っている様子を示す。この場合,各種の約束事に基づきこのよ
うな 0,1 の時系列データとして信号が送られる。
• データは,0,1 を電圧レベルで区別する。
• ビット同士の区別は電圧の持続時間で区別する。
• 伝送速度は単位時間内の伝送ビット数で表現される。ビット/秒 (bps),kbps,Mbps,Gbps 等。
11.3 伝送媒体
123
問題:kbps(kilo bit per second) は1秒間に 1000 ビットを示す。Mbps,Gbps はそれぞれどの程度の伝送速度
を表すか。
図 11.1: ネットワークの導線に流れる電気信号例
11.3 伝送媒体
ネットワークで上記のようなデータを伝送する物理的な方法として以下の3つが一般的である。
1. 銅線
(a)より線 (twisted pair):電磁的干渉を防ぐため,2 本の銅線をよったもの。銅線はアンテナの働きも
あり外部の電磁波によってノイズが誘導される。このため銅線をよりあわせることで,誘導された
ノイズを打ち消しあう。
(b)同軸ケーブル:銅芯の周りを絶縁体で覆い,その周りを金属線のシールドで覆ったもの。雑音に強
く,より対線などと比べると伝送損失もはるかに少ないのが特長。
2. 光ファイバー: ガラス媒体の中を通る光によって信号を伝達するもの。雑音に強く,高速大容量。
3. 電波:無線通信:無線方式。ワイヤリングが不要。電波は電波法の規制を受けない微弱電波によるもの
か,開放されている周波数帯に限定される。
図 11.2: ネットワークで信号を伝える信号線の種類
11.4 ネットワーク間をつなぐための機器
124
表 11.1: 伝送媒体の違いによる伝送速度と延長可能距離
伝送媒体
ビット伝送速度と延長可能距離
銅線 より対線 数 Mbps ⇐⇒ 数 km, 数 100Mbps ⇐⇒ 100m
同軸ケーブル
数 100Mbps ⇐⇒ 数 km
光ファイバ
数 Gbps ⇐⇒ 数 10km
電波 (無線)
波長による
11.4 ネットワーク間をつなぐための機器
ネットワークは,今や地球規模で広がっている。本学は日本・世界のネットワークにつながっており,大学
内部でも,学科レベル,研究室レベルなど各種規模のネットワークから構成されている。このような各種規模
の異なるネットワークを接続するには,ネットワーク間をつなぐための機器が必要となる。この機器はその接
続のレベルで以下のように分類される。
1. リピータ:物理層で信号を複製し、一か所で受けた信号を他方に流す装置。その役割は到達距離の物理
的な延長にある。
2. ブリッジ:データリンク層での論理的に延長。種類の異なる LAN 接続。(MAC アドレスを解釈し
MAC アドレスに従ってデータパケットを中継)
3. ルータ:ネットワーク層での論理といった方的延長。その役割は IP を解釈し経路制御をする。ネット
ワークを分割する機能もある。通常ルータ内部での通信が多い(例,本学科5F,6F)
。ルータ内で処
理を行い,ルータ外のネットワークに流れない様にしてネットワークの効率的運用を行う。
図 11.3: ネットワークの接続のレベル及び接続する機器
11.5 ネットワーク間をつなぐためのプロトコル
ネットワークをつなぐためには各種の約束事が必要である。このネットワークでの情報交換のための約束事
のことを,プロトコルという。この約束事は以下のような各レベルで必要となる。
1. 物理的な接続:コネクタの形状,ピン配置などが合うこと。
2. 電気的な接続:電気的に信号の交換を行うためには,電圧レベル等電気的特性が合っている必要がある。
11.5 ネットワーク間をつなぐためのプロトコル
3. データの形式と意味:電気的信号レベルで交換が可能になったとしても,(1) 伝送ビット表し方について
の約束事を合わせる必要がある。この方法についても幾つかの方法がある。また (2) ビットで表された
情報の解釈の仕方(形式と持つ意味)に対しても約束事に対する了解が必要である。例えば,文字コー
ドにしても ASCII コード,JIS コード,シフト JIS コード,EUC コード,ユニコードなど様々な方式
がある。画像,音楽などに対しても同様なことがある。
11.5.1 プロトコルの階層構造
上記に示すようにネットワーク間をつなぐための約束事をもう少し細かな役割のレベルで分けると,以下の
ような各階層に分けられる。
1. 物理層:物理的・電気的特性の約束事
イーサネット・ケーブル上の電気信号に関係するハードウェア的なレベルのプロトコル。物理層では
「パケット」 (フレームと呼ぶ事もある) の形で、データを送受する。
2. データリンク層:隣のなど中継の計算機とのやりとりの約束事
物理的に接続されたコンピューター間のデータの通信を行う。イーサネットが標準的なデータリンク層
のプロトコル。
3. ネットワーータリンク層:最終的宛先の計算機とのやりとりの約束事
IP と呼ばれるプロトコルが属する層。この層はマシンとマシンの間の通信プロトコルを担当する。IP
は伝送経路の確立等を担当する。
4. トランスポート層:相手コンピュータ内の宛先のプログラムへのデータ伝達の約束事
この層は別々のマシンのそれぞれのプロセスのあいだの通信を担当する。TCP や UDP が含まれる。
TCP / UDP は,プロセス毎にポート番号を割り当てる。
5. 応用層:宛先プログラムとのやりとりの約束事
メール配送,WWW などが代表的な応用プログラム。
以下にインターネットで用いられている CSMA/CD 方式と TCP/IP 方式について簡単な説明を行う。
11.5.2 データリンク層と物理層のプロトコル
イーサネットはバス構造ネットワークで,1 本の信号線を共有して多くの接続したコンピュータなどにデー
タを転送する。1 本の信号線のため,当然信号を送るコンピュータは同時に複数台は不可能で一台のみである。
このため,複数台のコンピュータから信号を同時に転送した場合に信号の衝突を避けるような仕組みが必要と
なる。CSMA/CD 方式 (Carrier Sense Multiple Access/Collision Detection) はこのためのデータ転送方式
である。図 11.4 にその手順を示す。
1. 他のコンピュータ同士が通信を行っている状態では,信号線に搬送波が存在するので,新たに利用しよ
うとするコンピュータは通信終了まで待つ事になる。
2. 信号線に搬送波が存在しない状態でも,複数のコンピュータが通信をほぼ同時に開始した場合,衝突が
発生する。すると信号を開始した複数のコンピュータは,直ちに通信を中止する。
3. しかる後,ランダムな時間待ち,通信を開始する。この時に通信の衝突が無ければ通信成功となる。
125
11.6 インターネットの番地付(IP アドレス)
図 11.4: CSMA/CD 方式によるデータ転送の仕組み
11.5.3 TCP/IP (Transmission Control Protcol / Internet Protocol)
TCP/IP とは,よく聞く単語であるが,これはネットワークでのネットワーク層とトランスポート層に相当
する約束事である。図 11.5 にその概要を示す。IP とは,ネットワーク層プロトコルを表し,データを転送す
るネットワーク層の約束事を決めたものである。TCP は,ネットワーク上の離れたコンピュータ間の接続を確
立するトランスポート層の約束事であり,TCP(Transmission Control Protocol)と UDP(User Datagram)
の2つがある。これらのプロトコルは,パケットデータを送る場合の転送手順を示したものである。
• TCP:トランスポート層に相当する約束事。離れた計算機上でのプログラム間の通信リンクの確立する
ための約束事。
• IP:コンピュータネットワーク上でデータを目的の計算機まで中継する約束事。
図 11.5: ネットワーク層とトランスポート層
11.6 インターネットの番地付(IP アドレス)
さて,これまでにネットワークのケーブルの話,信号レベルでの通信の仕組み,通信の約束事について話を
してきた。この節ではインターネットにつながっている膨大な数の中からどのようにして特定のコンピュータ
を見つけるのかについて解説する。
インターネットにあるコンピュータ同士の通信には,ネットワークでつながっているコンピュータを判別する
仕組みが必要である。これには,インターネットにつながったコンピュータに付けられた番号を用いる。この
番号のこと IP アドレスという。この各コンピュータに割り当てられた IP アドレスは全世界で唯一のものであ
126
11.6 インターネットの番地付(IP アドレス)
る。現在,IP アドレスは 32 ビットで表される。このため,232 個の IP アドレスしか存在しない。
11.6.1 IPアドレスの階層化
インターネットのような全世界を結ぶネットワークは,複数の小さなネットワーク,例えば大学,企業など
の組織単位に分割されて管理されている。IP アドレスは,この小さなネットワークを示す部分と,この小さな
,後
ネットワークの中でのコンピュータを示す部分の 2 つに分かれている。前者を「ネットワーク・アドレス」
者を「ホスト・アドレス」と呼ぶ。
このため IP アドレスを,小さなネットワーク(LAN) を示す番号と,そのネットワークにつながっている
コンピュータ(ホストという)を示す番号に分けてある。
• ネットワーク・アドレス:大学,企業などの組織単位のネットワーク (LAN) を示す番号
• ホスト・アドレス:各組織のネットワーク (LAN) につながっているコンピュータを示す番号
そしてこの 2 つの部分の 32 ビットの中での占める割合により,図 11.6 に示すように,A,B,C クラスに分けら
れている。
図 11.6: ネットワーク層とトランスポート層
1. クラス A: 第 1 ビットが”0”になっている IP アドレス。(→ 先頭の 10 進表示が 1∼126 になっている
IP アドレス)
• ネットワーク・アドレス:7 ビット 27 個
• ホスト・アドレス:24 ビット 224 個
2. クラス B:第 1∼第 2 ビットが”10”になっている IP アドレス。(→ 先頭の 10 進表示が 128∼191 に
なっている IP アドレス)
• ネットワーク・アドレス:14 ビット 214 = 16, 384 個
• ホスト・アドレス:16 ビット 216 = 65, 536 個
3. クラス C: 第 1∼第 3 ビットが”110”になっている IP アドレス。(→ 先頭の 10 進表示が 192∼223 に
なっている IP アドレス)
• ネットワーク・アドレス:21 ビット 221 = 2, 097, 152 個
• ホスト・アドレス:8 ビット 28 = 256 個
この IP アドレスの 32 ビットを用いて,上位ビットの部分と下位ビットの部分によって以下のアドレスが割り
付けられる。
1. ネットワーク番号:大学,企業などの組織単位
2. ホストアドレス:組織単位でのネットワークに接続している計算機
(a)サブネット:組織内部で,さらに複数のネットワーク単位に分けること。 →サブネットマスク
127
11.7 IP アドレスと MAC アドレス
(b)DHCP(Dynamic Host Configuration Protocol):接続要求があった場合,プールしてある IP ア
ドレスを動的に割当てる方法。
問題:電気通信大学のネットワーク番号を調べてみよう。
• IP アドレスは,通常は 130.201.64.69 のように 32 ビットを 4 バイトに分け,各バイトの数値を 10 進数として表
し,ドット’.’ で区切って表される。各桁は1バイト(8 ビット)のため各桁の範囲は 0∼255 となる。
• ネットワークアドレスは IP アドレスの管理組織 (日本では JPNIC) によって個々の組織に割り当てられている。
しかし,ホストアドレスは特に登録などは必要なく、割り当てられたネットワークアドレスの範囲内で組織内で自
由に利用してよい。
11.7 IP アドレスと MAC アドレス
プロトコル下位層の物理層では,IP アドレスではなく,MAC アドレスでデータがやりとりされる。ネット
上のコンピュータは,IP アドレスと MAC アドレスの変換テーブルを自動的に生成する。
• IP アドレスは,ホストコンピュータが持つ論理的アドレスである。それに対して MAC アドレスとは,
コンピュータが使っている LAN カードのカード固有の物理的アドレスである。IP アドレスは,論理的
アドレスでソフト的に変更可能であるが,この MAC アドレスは変更が出来ない。
注)個人に郵便を出す場合を考えよう。その人の住所氏名を書けば郵便は配達される。住所・氏名は変更可
能である。しかし,指紋等は物理的にその個人を特定付けるものであり変更出来ない。
論理的アドレス(IP アドレス)とはこの例でいうと,住所・氏名のようなものであり,同一のコンピュータで
も,接続するネットワークによって IP アドレスは変更になる。但し,コンピュータの場合ネットワークに接
続するためには LAN カードというインターフェースカードが必ず必要になる。
物理的アドレス (MAC アドレス) は,この LAN カードについている固有番号でありコンピュータの LAN
カードを差しかえると,そのコンピュータの MAC アドレスは当然変わることになる。
1. IP アドレス:ホストコンピュータが持つ論理的アドレス。
2. MAC アドレス:LAN カード固有の物理的アドレス。ハードウェアとして埋め込まれた 6byte で表現
される世界で唯一のその機器固有のアドレス。例)6E:7C:B0:DA:FF:2A のように表現される。
11.8 ドメイン名と DNS
上記で述べたように,ネットワークにつながっているコンピュータには IP アドレスが付けられている。こ
の IP アドレスは数字であるため,人間にとってはわかりにくい。このため人間に覚えやすいようにドメイン
名として名前として登録することが一般的である。ドメインとは,ネットワークで,サーバを中心としたネッ
トワークを構成するまとまりを表す。例えば,知能機械工学科は mce.uec.ac.jp となる。mce は知能機械工学
科,uec は電気通信大学,ac は大学教育機関,jp は日本を表している。
コンピュータ同士が通信を行うためには,数字としての IP アドレスが必要となる。このメイン名→ IP アドレ
スへの変換を行う機能をもったコンピュータは DNS(Domain Name Server) と呼ばれる。
1. ドメイン名:ホストの名前
IP アドレス→名前として登録(ホストは数字で表現できるが数字では覚えにくい)ex) rm.mce.ec.ac.jp
2. ドメイン名→ IP アドレスへの変換 DNS(Domain Name Server):名前サーバがこの変換を行う。
128
129
第 12 章
機械回路の記号解析
はじめに
機械の特に動力学的解析手法と,電気回路の交流理論及び過渡解析的手法との間には非常に似通った関係に
ある。また同様な関係は,特定な場合の熱・流体に対しても成り立つ。本講義では,機械システムの動力学的
特性を,機械回路に置き換えて電気回路的に解析する手法について解説を行う。
12.1 機械系と電気系における相似
ここで例として図のような機械系と電気系のシステムについて考えてみる。機械系は1自由度の振動系で外
力で駆動されている。同様に電気系は LCR が並列に接続された系で電流源により駆動されている。機械系で
は速度を,電気系ではは電圧をそれぞれ表すものとする。この両方の系のの方程式を作ってみる。すると力の
平衡方程式と,キルヒホッフの電流保存則 (KCL) から下記のような方程式となる。ここで f ⇔ i,v ⇔ V ,
m ⇔ C ,d ⇔ R−1 ,k ⇔ L−1 を対応させると,この系を記述する方程式は表 12.2 に示すように同じとなる。
図 12.1: 機械系と電気系における相似回路
機械系
力の平衡から
f = f1 + f2 + f3
dv
+ dv + k vdt
f =m
dt
電気系
キルヒホッフの電流保存則 (KCL) から
f = i1 + i2 + i3
1
1
dv
vdt
+ v+
f =C
dt
R
L
12.2 量の話
130
このことは機械系の解析に電気系のアナロジーが利用できることを示している。すなわち機械系を電気回路系
に置き換えることで機械系の特性が推定できることを示す。本章ではこの機械系を電気回路系に変換し,変換
した電気回路系を,回路シミュレータを用いてその特性を解析することを試みる。
12.2 量の話
我々の扱う物理量の量の概念に関しては各種の見方がある。例えば”連続量と離散量”という分け方もある。
量に関しての,その質に関する論理構造が出てくるのは,皆さんが小学校で教わった”外延量と内包量”が始め
ではないかと思う。即ち,長さ,重さなど,そのまま足せる”外延量”と,温度,密度,濃度などのそのまま足
せない”内包量の概念を教わってきた。
• 外延量 (extension):長さ,面積,体積,質量,時間など(そのまま足せる量)
• 内包量 (intension):濃度,密度,温度,速度,流速など(そのまま足せない量)
このような量の分類の一つとして,”流通量と位差量”がある。流通量とは,電流,流量,力など,要素を通過
する量を表し,位差量とは,電圧,圧力,温度,速度など要素に加わる差の量を表す。
• 流通量 (throughquantity):電流,流量,熱流量,力など,要素を通過する量。
• 位差量 (accrossquantity):電圧,圧力,温度,速度など,要素に加わる差の量
電気系,機械系,熱系,流体系の基本となる方程式は,既に述べたように同じ方程式として記述出来る場合が
多くあり,このことから各系の解析は違う系のアナロジーを用いて行える。例えば,機械系を同じ方程式とな
る電気回路として解析する場合がこれに当たる。この流通量と位差量の概念は,電気系,機械系,熱系,流体
系をアナロジーを用いて解析する場合,各物量を対応付けする場合に重要になる。下表にそれぞれの系におい
て対応する量と,その方程式,及びエネルギの蓄積と散逸を行う要素について示す。
表 12.1: 流通量と位差量
電 気 機 械 熱 流 体 量 流通量 電流 i 力 f (モーメント M ) 熱流量 q 位差量 電圧 v 速度 v (角速度 ω ) 温度 T 流量 w
圧力 P
表 12.2: 基礎方程式
電 気 方程式 KCL: inet = 0 (流通量) 方程式 (位差量) KVL: 機 械 vloop = 0 f =0 M =0 熱 dT
dm
= qnetin Wnetin =
dt
dt
C 熱容量 f =0
C
vloop = 0 ωloop = 0 流 体 Tloop = 0 Ploop = 0
12.3 モビリティ法
131
表 12.3: エネルギーの蓄積 (受動的)
電 気 流 コイル (L) 通 i =
量 1
L
量 流 体 バネ (K) vdt ωdt 熱容量 (C) 流体容器 (C)
M = kΔx = k
位 容量 (C) 1
C
熱 vdt f = kΔx = k
差 v =
機 械 idt
i=C
dv
dt
質量 (m) 1
f dt m
1
M dt ω=
J
v=
qnet = C
dT
dt
dp
(gas strage)
dt
dh
w=C
(liquid strage)
dt
w=C
表 12.4: エネルギーの散逸 (受動的)
電 気 流 抵抗 (R) 通 量 i=
1
v
R
機 械 熱 流 体 粘性抵抗 (d) 熱抵抗 (R) 流体抵抗 f = dv q=
M = kΔx = k
ωdt 1
1
1
(T1 − T2 ) w = (p1 − p2 ) α
R
R
電気 機械 熱 流体量 流通量 電流 i 力 f(モーメント M) 熱流量 q 流量 w 位差量 電圧 v 速度 v(角速度
ω) 温度 T 圧力 p(又は高さ h)方程式(流通量)方程式(位差量)エネルギーの蓄積(受動的) 流通量 コ
イル(L)inductor バネ (k)spring 位差量 容量 (C)capasitor 質量 (m)mass 熱容量 (C)heatcapacity 流体容
器 (C)gasstrageliquidstrage エネルギーの散逸要素(受動的 抵抗 (R)resistor 粘性抵抗 (d)damper 熱抵抗
(R)heatresistance 流体抵抗 fluidresistance
12.3 モビリティ法
本章では,機械システムの動力学的特性を,機械回路に置き換えて電気回路的に解析する手法について解説
を行う。このため,機械系の,”速度と力”を,電気系の”電圧と電流”に対応させたモビリティ法について解説
する。こ例外の対応関係を取ることも可能であり,その例は次章で説明する。
1。モビリティ (mobility) 定義:のとき,をモビリティ (mobility) とする。
図に示す機械要素の入力端1の速度を,出力端2の速度をとし,通過する力をとする。これから,この定義
に則り,ダンパ,ばね,質量のモビリティによる表現を求めてみる。
(1)ダンパのモビリティ図は粘性流体入りのダンパを示す。入力端の速度と必要とする力の関係は以下の
,よって
ようになる。ただし,R:減衰抵抗係数すると定義式から,
となる。(2)ばねのモビリティ図はばね要素を示す。
ただし,k:ばね剛性,c:ばねのコンプライアンス定義式は速度差を求めるため,それぞれの変位を時間で
微分したものになる。
12.3 モビリティ法
132
ここで,微分を演算子 s で表すと上式は
となる。ここで,,よって
となる。
ここで,微分演算子を s とおいたが,これはヘビサイド演算子法,ラプラス変換法に関係するものである。
ここでは,力を微分する記号と考えればよい。
(3)質量のモビリティ質量は剛体である限り,定義式で示した入力端1の速度を,出力端2の速度をとし
た速度差はどのように考えればよいのだろうか。質量と力の関係はと表現され加速度 a は慣性系からの加速度
となり,通常地球を原点とした加速度,すなわち地球を原点と考えて質量の速度の時間微分を行うことで加速
度を求めている。すなわち,入力端1の速度をとすると,出力端2は慣性系である地球であり,と考えてよい
であろう。
となる。ここで,,よって
となる。ここでは微分演算子の逆演算であるので積分を表す。すなわちをあらわす。
2。要素の接続(1)直列接続公式右図において要素は全て直列に接続されている。 全ての要素には,同
じ力がかかる。 各要素入出力端の速度和は以下のようになる。
この直列接続全体のモビリティーは,各要素入出力端の速度和を力で除すれば良い。
以上より,直列接続のモビリティは,各要素のモビリティの総和となる。
(2)並列接続公式右図において要素は全て並列に接続されている。 全ての要素には,同じ速度差がかか
る。 各要素入出力端の力の総和は以下のようになる。
この並列接続全体のモビリティーの逆数は,各要素入出力端の力の総和を速度差で除すれば良い。
以上より,並列接続のモビリティの逆数は,各要素のモビリティのの逆数の総和となる。
2。機械回路と電気回路の関係
これらのモビリティと電気回路の間には次のように関係つけることによって,機械系を電気回路と同様な解
析手法によって解析できる。
流通量:要素を通る力 ¡—¿ 要素を通る電流位差量:要素両端の速度差 ¡—¿ 要素両端の電位差 (電圧)
ダンパ: ¡—¿ 電気抵抗 (レジスタンス):ばね: ¡—¿ インダクタンス:慣性質量: ¡—¿ 電気容量(キャパ
図 12.2: 相似回路
電気系
機械系 熱系 ω
流体系 12.3 モビリティ法
シタンス):
機械要素 mobility 電気要素 impedance 速度: 電圧:力: 電流:ダンパ:粘性抵抗 電気抵抗:電気抵抗コン
プライアンス:ばね定数の逆 インダクタンス (コイル):ヘンリー質量:質量 キャパシタンス(電気容量):ファ
ラッド
例 1)下図に質量と粘性抵抗(ダンパ)系をバネを介して左側からクランクで駆動する回路を示す。これは
ちょうど機械的蓄音機(古いですが)の針がレコードの溝をなぞり,スピーカを通して空気振動として音を再
生するモデルです。この時の f は針にかかる力に相当する。または,力を駆動力よ考え,とを求める問題とも
考えられる。この場合,スピーカの駆動コイルに電流が流れ,ダイナミックコーンと外気の弾性,質量,粘性
がこれに関係する場合である。
(a) は機械回路として表現した図です。は既知と値とする。(b) はこの機械回路をモビリティを用いて表現し
たものである。この機械回路のモビリティは,
発生する力は,
また,速度は,
となる。(c) は,電気回路として表現したものである。この場合,駆動電圧は,
となり,電圧()の正弦波交流となる。回路のインピーダンスは,
回路に流れる電流は,となる。
下記に電気回路シミュレータの結果を示す。例2)複雑な振動回路例1ではモビリティ法を用いずとも簡単
な微分方程式を用いて解は求められる。しかしながら,次のような複雑な振動回路となるとモビリティ法は大
いに効果をはたす。これは振動計の一種で,質量1が土台に板バネで接続されている。この質量1は図のよう
にバネとダンパによって土台とリンクしている場合,質量1に力fが作用したときに質量1にいかなる速度v
が発生するかを計算する。
振動数:
これらをモビリティへ変換すると,
図の振動計は図 (a) のような等価モデルに置き換えられる。力fは土台に取り付けられた板バネ e で保持さ
れた質量1に力を及ぼし,質量1はダンパを介して,質量2に力を加える。質量2はバネ a によって土台に接
続され,またバネ b を介して質量3とダンパ d に力を伝える。この場合,質量の取り扱いだが,質量に加わる
慣性力は,土台(地球)に対しての加速度となるため,地面に並列接地することになる。図(b)はこれを書
き直したものである。図(c)はこれを電気回路として表現したものである。質量は容量(キャパシタンス)
に,バネはコイル(インダクタンス)に,ダンパは抵抗(レジスタンス)に,それぞれ対応させて書き直した
ものである。但し,要素を通る力は,要素を通る電流に,速度差は,電位差 (電圧)に変換される。以下にこの
回路のインピーダンスを求めてみる。まず始めに図の点線で示した部分より右側を見た場合のインピーダンス
を計算する。
ここで,モビリティと電気回路の間の関係から,機械回路での駆動力は,電気回路では電流に,機械回路で
の速度は,電気回路では電圧に,それぞれ対応する。よって機械回路で駆動力で駆動した場合の駆動点での速
度は,電気回路上でインピーダンスに電流 I を流したときに発生する電圧 V となる。(大文字の V,I は電圧・
電流の複素表示を表す)よって,駆動点での速度は以下のようになる。
即ち,
となる。また変位を求めるには速度を積分すればよい。演算子としてはとすればよい。であるので,以下の
ようになる。
例3)フィードバック追従回路右図はシンクロトランスを使用した機械電気フィードバック追従回路である。
左側のハンドルを回転する,とサーボモータによって右側のレーダアンテナなどの機構がハンドルの回転に追
従して回転する。原理は,A,B 2個のシンクロトランスの回転角の差に比例した交流電圧がサーボアンプに入
133
12.3 モビリティ法
力され,それに比例してサーボモータのトルクが発生する。
サーボモータの回転は減速機(慣性モーメント J1)によって減速され,ねじりコンプライアンス (c) を有す
る軸を経て,減衰 (モビリティー= a),並びに負荷(慣性モーメント J2)を駆動する。出力角度はシンクロト
ランス B に接続されているため,入力角度が出力角度より進めば,サーボモータが追っかけ,入力角度が出力
角度より遅れれば,サーボモータが引き戻す。このようにして常に回転角の差を零,即ち交流電圧も零とする
ような制御が行われる。追従装置の部分を取り出すと右図のようになる。サーボモータのトルクは一部モータ
の回転子と減速機の慣性モーメントに取られ,残りのトルクが軸に伝達される。図の追従装置の部分のモビリ
ティーを計算する。
入力端の速度を V とすると,トルクより速度を V が求まり,その内慣性モーメント J1 に取られるトルクは
以下のように求まる。
これより,
また,
これにモビリティーを代入すると次のようになる。
このように機械回路のモビリティが求められたから,この回路のブロック線図は次のようになる。について
関係式を求めると以下のようになり,その両辺を時間積分すれば角度となる。
この式にモビリティーを代入すると
例 4)クランク軸のねじり振動以下のような機械システムは機械回路に変換し,電気回路シミュレータを用
いると簡単に結果を求めることが出来る。
付録
回路シミュレータ
回路シミュレータは各種のものがある。
例えば本講義のシミュレーション例は CircuitMakerStudentVersion を利用している。シミュレーションソ
フトの使い方は非常に簡単である。マニュアルは英語ですが,簡単な英語だと思います。また,この回路シ
ミュレータの解説本として講談社出版「電子回路シミュレータ入門」(加藤ただし著、¥1500)が有る。本に
はソフトとサンプルの入った CD がついている。
電子回路シミュレータ CircuitMaker 学生版(無料ソフト)3。4MB
http://www。circuitmaker。com/downloads/student。htm
134
© Copyright 2026 Paperzz