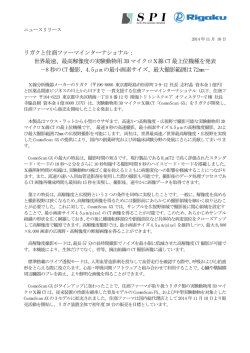
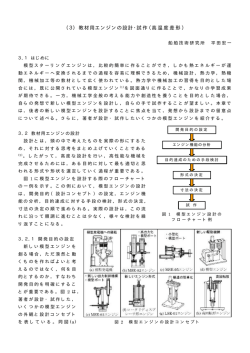
ミスカップリング ISO機械状態監視診断(振動) カテゴリーⅡ 訓練講座 駆動側 被駆動側 心振れ (ポンプ) (モータ) 第6章 対策処理 面振れ 講 師 : 小 村 英 智 博士(工学) 軸受ミスアライメント 駆動側 (軸受)心ずれ 心出し作業をする機械 被駆動側 (ポンプ) (モータ) 矢視 (軸受)面開き A L1 250mm B L2 700mm 1 m1 = r +α - C 偏心量(心ずれ)の測定 r α 0 0° ポンプ側 共回し モータ側 +27 90° +38 270° 180° +65 偏 心 の 補 正 55μm 単位: 1/100mm 325μm r m1 m2 r C r C 2 m2 = r -α- C m1 m2 2 β 偏心量(心ずれ)の測定 α m1 偏角量(面開き)の測定 R = 200 mm 0 0 0° ポンプ側 共回し モータ側 +27 5.5 270° 0° 90° +38 ポンプ側 共回し モータ側 23 270° 90° 14 32.5 180° +65 0 65 32.5 2 38 27 5.5 2 180° 単位: 1/100mm 37 m1 m2 R sin R 0180 90 270 単位: 1/100mm m2 2 β 偏角量(面開き)の測定 R = 200 mm 0 0° ポンプ側 共回し モータ側 23 270° 9 90° 14 37 180° 37 単位: 1/100mm 偏 角 量 の 補 正 112.5μm 315μm 0180 0 37 37 / 200 90270 14 23 9 / 200 112.5μm 偏 角 量 A0180 1294μm 315μm 90 90 250 112.5m B90270 700 315m 200 200 370 370 700 1294 m 250 462.5m B0180 200 200 462.5μm 1294μm A90270 462.5μm 偏 心 の 補 正 55μm 325μm 3 ◆ 図はモータとポンプの軸の心出し作業を示している.図に示すようにダイアルゲー ジはポンプの軸に取り付け,ダイアルゲージの触針は,モータ軸側のカップリング に接触している. モータおよびポンプ軸を共回しして,触針が上下,左右にきたときのダイアルゲー 心 出 し の 補 正 ジの指針(読み)は+方向にふれることを考慮して,ポンプの軸に対するモータの 167.5μm 370μm 軸の上下のオフセット量を求めよ.なお,ポンプの軸よりもモータ軸が下方向に位 置した場合,オフセット量は正の値をとることとする. 上下方向のオフセット量 = (下の読み−上の読み) / 2 137.5μm 969μm 偏心量,偏角量の許容値(参考値) = ((−127)−(0)) / 2 = −63.5 μm ◆ 前問の結果をふまえて,上下方向の心出しをしたい.モータの各脚と機台間で行 うシム調整としてどのような作業が適切か. 単位:mm 円周方向(α) 偏心量 面方向(β) 偏角量 回転数 新設 修理 新設 修理 1,800以下 0.03 0.05 0.02 0.03 1,800 ∼3,600 rpm 0.02 0.03 0.01 0.02 3,600 ∼ 9,500 rpm 0.01 0.02 0.005 0.01 9,500 ∼30,000 rpm 0 0.005 0 0.005 シムを63.5 μm減らす. 63.5 μm + 上下方向のオフセット量 = −63.5 μm 4 ◆ 前問でのダイアルゲージによる結果に基づいて,ポンプの軸に対するモータの ◆ 前問での測定終了後,ダイアルゲージを図のように取り付け,モータ軸側カップリ 左右方向のオフセット量を求めよ.なお,ポンプの軸よりもモータの軸が右方向 ングのフランジ部に触針を接触させて,モータおよびポンプ軸を共回しして,触針 にずれている場合,オフセット量は正の値をとることとする. が上下,左右にきたときのダイアルゲージの読みを図に示すように記録した. ポンプの軸に対するモータの軸の鉛直方向面内(上下方向の)角度ミスアライメン トα,および水平方向面内(左右方向の)角度ミスアライメントβはそれぞれいくら か.ただし,軸を共回しした時にダイアルゲージの触針先端が描く円の直径は127 mmである. 左右方向のオフセット量 = (右の読み−左の読み) / 2 = ((−152)−(25)) / 2 = −88.5 μm ◆ 前問での左右方向のオフセット量の測定結果に基づいて,左右方向の心出しを したい.モータは,ポンプに対して,どの方向にどれだけ動かすのが適切か. 小さな角度の場合,L×sin α = L×α = Δd である.ただし,αはrad 角度α = Δd / L となり,Lは円の直径の127×1000 (μm)である. 上下方向は,上を基準にして,Δd = (上の読み)−(下の読み) = 0−(-51) = 51μm 角度ミスアライメントα = 51 / 127000 = 0.0004 rad 右方向に88.5μm動かす. 左右方向は,右を基準にして,Δd = (右の読み)−(左の読み) = 101−(-152) = 253μm 88.5μm + 角度ミスアライメントβ = 253 / 127000 = 0.002 rad 88.5μm 左右方向のオフセット量 = −88.5 μm 5 転がり軸受のアライメント 内輪のアライメント測定 内輪表面と外輪表面が平行であるとき 軸受は心出しされていると看做される. 不つり合いの種類 外輪のアライメント測定 1面法 静的アンバランス 2面法 偶力アンバランス 2面法 動的アンバランス 6 回転パルスの検出 不つり合いの修正面 キー溝 反射テープ 2面法 1面法 電磁式 光学式 剛な回転体ならば,2面法ですべての不つり合いを修正できる. 回転パルスの検出 1面法と2面法の適用例 L/D 1面法 2面法 D 0.5以下 1000rpm 1000rpm 以下 以上 D 0.5以上 150rpm 150rpm 以下 以上 キー溝 反射テープ 1回転 360° L 光学式 電磁式 L 7 回転パルスと振動 位相測定 振動加速度センサ 渦電流式変位センサ t2 t1 VA-11B概観 回転パルス計 トリガー点 t1 360 90 t 2 t1 回転パルスと振動 つり合せとは 振動加速度センサ 位相差 振動波形 渦電流式変位センサ 1回転360° 回転パルス計 トリガ信号 ・不つり合い量? ・反対の箇所に トリガ信号と位相の関係 ・不つり合い箇所? 不つり合い量と同じ 修正量を付加 8 初期振動 25 25 位相角が増えることは, 20 20 不つり合い点が反回転方向 15 10 15 10 にある. 5 変位 [ μm ] 変位 [ μm ] 試しおもりを付けた時の振動 t 0 -5 5 0 -5 -10 -10 -15 -15 -20 -20 -25 -25 0 時間(ms) 50 0 時間(ms) 振 幅 : 20μm 振 幅 : 10.3μm 位 相 : 30° 位 相 : 77° 50 5g 試しおもりを付けた時の振動 25 25 20 20 15 15 10 10 変位 [ μm ] 変位 [ μm ] 初期振動 5 0 90゜ -5 試し錘 5 0 90゜ -5 -10 -10 -15 -15 -20 -20 -25 -25 0 時間(ms) 50 0 180゜ 10μm 振 幅 : 20μm 位 相 : 30° 20μm 時間(ms) 0゜ 50 180゜ 10μm 振 幅 : 10.3μm 20μm 0゜ 位 相 : 77° ベクトル 20μm∠30° ベクトル 10.3μm∠77° 270゜ 270゜ 9 効果ベクトルの算出 修正おもりの取付け位置 90゜ 20μm 180゜ 10μm 20μm 0゜ 30 ° 修正錘 6.7g 270゜ 修正おもりと取付け位置の算出 試しおもり5gで15μm. 20μmに相当する質量 は 5 : 15 = x : 20 20 x 5 15 180゜ 6.67gになる. ◆ フィールドバランスをするため,図に示すように,初期振動ベクトルAを測定し た後,質量1gの試しおもりを120°の位置に付加し振動ベクトルBを測定した. 初期振動ベクトルAの振幅∠位相遅れはいくらか. 90゜ 20μm 15μm 10μm 30° 20μm 0゜ 修正点は,試しおもり の位置から 30°位 相遅れ(反回転方向) の点である. 270゜ 10 ◆ 試しおもり付加時の振動ベクトルBの振幅∠位相遅れはいくらか. ◆ 図のように,等間隔に36個の穴が空いている円板がある.既に3個のおもりが付 いている.これらのおもりを外して1つのおもりに置き換えたい.置き換えるおもり の質量と,取り付ける穴の番号はどこか. おもりの質量と位置は次の通りである. ◆ 角度OAB∠位相遅れはいくらか. 28.4g∠0° 28.4g∠70° 56.8g∠150° ◆ 効果ベクトルABの振幅∠位相遅れはいくらか. ◆ 試しおもりを外し,バランスを行うための修正おもりの大きさを求めよ. ◆ この修正おもりをつける位置はどこか. ◆ 回転体のつり合せをすることにした.つり合せの結果,210°の位置に質量2.8g ◆ 先端に羽根車のついたロータ系がある.図(1)に示すように,円盤P位相に羽根車 の修正おもりを付けることになった.以前のつり合せですでに90°の位置に質量 のT位相を合わせたときの不つり合い振動のベクトルはN = 50μm∠150°で 1.4gの修正おもりが付いている.古い修正おもりを外して,この二つのおもりをま あった.図(2)に示すように羽根車を180°回転させたときの不つり合い振動ベク とめて一つにしたい.この場合の修正おもりの質量と,取り付け位置はどこか. トルはF = 120μm∠45°であった. (a) 羽根車を図(1)の状態から回転方向へ何度の位置に取り付けたらよいか. (b) 最少となる振動振幅は何μmになるか. 30 60 270 3 00 0 33 0 90 0 24 0 12 1 50 11 180 2 10 振動ベクトルの和と差 簡便な求め方 90 N P T 90 F F 120 m45 P F P T N N 50 m150 T 180 0 180 0 T 270 270 不つり合い量 振動ベクトルの和と差 P 58.7 m70 F P T 1 P NF 2 F 120 m45 90 N P T N 50 m150 m 180 0 T 70.7 m205 1 T N F 2 e 70 180 205 45 Amp 70.7 m 58.7 m 12m (1)不つり合い量(U)=総質量(m)x偏芯量( ) 100g・mm = 100kg x 1μm ・同心度1/1000mmなんて加工は無理 F 120m225 270 ⇒つり合わせ作業とは,加工精度を1桁程度上げる作業 12 不つり合い量 ◆ 質量100kgの回転体についてバランスを行ったところ,最終的に300g・mmの 不つり合い量が残った.この状態での偏芯量はいくらか. Δm r (2)不つり合い量(U)=質量(⊿m)x回転半径(r) ◆ 半径100mm,質量100kgの回転体の外周面に取り付けてある2gの部品が回 転中に1個飛散した.この時,生ずる不つり合い量はいくらか. 100g・mm = 1g x 100mm ・回転半径が大きければ不つり合い量は大きい ⇒FBO (Fan Blade Out)のアンバランス量は巨大! ◆ 回転体の偏芯量とは,( また偏芯量は不釣合いを( ア ア )と回転体重心との距離を言う. イ )で除すことで求めることができる. イ 1. 回転体外周面 回転体半径 2. 回転体中心 回転体質量 3. 軸受位置 回転体半径 4. 回転体中心 回転体直径 5. 回転体外周面 回転体質量 ◆ 質量25kgのロータで,直径50mmの位置に20gの不つり合いがある. このとき偏心量(比不つり合いの大きさ)εはいくらか. 不つりあい20g 50mm ロータ質量25kg ◆ 半径100mm,質量500kgの回転体の外周面に取り付けてある10gの部品が回 転中に1個飛散した.この時,生ずる不つりあいU = mε = Δmrはいくらか. また,それはいくらの偏心量εに相当するか. 13 アンバランス力(遠心力) ◆ 重さ98kgの薄い円盤を剛な回転軸にキー止めしたら1/100mm偏心した.この 回転体の不つりあいによるバランスを修正するために必要な修正量はいくら アンバランス力(F)=不つり合い量(U)×ω2 か.ただし回転軸の危険速度は回転数より高く,十分に離れているとする. ・不つり合い量(U)=質量(⊿m)x回転半径(r) ・不つり合い量(U)=総質量(m)x偏芯量(ε) 例えば... Δm = 100 g, r = 500mm, ◆ 前問の重さ98kg,偏心1/100mmを有するこの回転体を955(1/min)=100(rad/s) fr = 5000 rpm 2 で回転させると不つりあいによる遠心力はおおよそいくらか. アンバランス力 F mr 2 0.1 500 5000 2 13,700 N 1000 60 U = 100 g・mm , fr = 15000 rpm 2 アンバランス力 F U 2 アンバランス力(遠心力) 100 15000 2 247 N 1000 1000 60 ◆ 質量1000kgの薄い円盤を剛な回転軸にキー止めしたら10μm偏心した.この 回転体の不つりあいを修正するための記述として正しいものはどれか. ただし回転軸の危険速度は回転数より高く,十分に離れているとする. アンバランス力(F)=質量(Δm)x回転半径(r)×ω2 1. 10kg・mm:修正おもりは偏心と逆向き 2. 10kg・mm:修正おもりは偏心と同じ方向 不つり合い量(U) アンバランス力(F)=不つり合い量(U)×ω2 3. 10kg・mm:修正おもりは偏心から回転方向へ90度 ω 4. 10kg・mm:修正おもりは偏心から回転と逆方向へ90度 F 5. 98kg・mm:修正おもりは偏心と逆向き ・不つり合い量(U)=質量(⊿m)x回転半径(r) Δm ・不つり合い量(U)=総質量(m)x偏芯量(ε) ◆ 前問の回転体を955(1/min)=100(rad/s)で回転させると不つりあいによる遠心力 はおおよそいくらか. r 14 各種回転機械に推奨されるつり合い良さの等級 つり合い良さ の等級 つり合い良さ の上限 mm/s ロータの種類一例 つり合い良さ の等級 つり合い良さ の上限 mm/s 剛支持されたシリンダ数奇数の舶用デーゼル機関(2)のクラ G4000 4000 G1600 1600 剛支持された大型二サイクル機関のクランク軸系 G 630 630 剛支持された大型四サイクル機関のクランク軸系 弾性支持された舶用デーゼル機関のクランク軸系 G 250 250 G 100 100 6シリンダ以上の高速デーゼル機関(2)のクランク軸系 自動車,トラック及び鉄道車両用(ガソリン又はディーゼル)機 関の完成品(3) 40 自動車用車輪,リム及び駆動軸 舶用プロペラ 弾性支持された6シリンダ以上の高速四サイクル(ガソリン又 はディーゼル)機関(2) のクランク軸系 自動車,トラック及び鉄道車両用機関のクランク軸系 G 40 各種回転機械に推奨されるつり合い良さの等級 ンク軸系(1) G 2.5 2.5 G1 1 G 0.4 0.4 剛支持された高速シリンダデーゼル機関(2)のクランク軸系 各種回転機械に推奨されるつり合い良さの等級 ロータの種類一例 ガスタービン,蒸気タービン及び舶用主機タービン(商船用) 剛性ターボ発電機ロータ 製紙ロール ターボ圧縮機 工作機械主軸 特別の要求のある中型及び大型電機子 小型電機子 タービン駆動ポンプ テープレコーダ及び音響機器の回転部 研削盤のといし軸 特別の要求のある小型電機子 精密研削盤のといし軸,といし車および電機子 ジャイロスコープ 回転機械の振動を低減のためにつり合わせは必要. 必要以上のつり合わせは経済的に無駄. ある程度の振動値で妥協すること. つり合い良さ の等級 G 16 G 6.3 つり合い良さ の上限 mm/s ロータの種類一例 つり合わせの良否の判断基準,JIS B 0905(1978:ISO1940準拠) 16 特別の要求のある駆動軸(プロペラ軸,カルダン軸) 圧砕機の部品 農業機械の部品 自動車,トラック及び鉄道車両用(ガソリン又はディーゼル)機 関の部品 特別の要求のある6シリンダ以上の機関のクランク軸系 回転機械の軸受や基礎には,静荷重のほかに不つり合いによる遠心力が作用して繰返 し応力や振動が生じる.遠心力がある限度を超えると,回転機械の滑らかな運転が困難 となり,その機能が低下する.さらにゆるみ,ガタ,割れなど2次故障の原因となる. ① 回転体の質量が大きければ不つり合いは大きくてもよい. 6.3 プロセスプラント用機器 舶用主機タービン歯車(商船用) 遠心分離機ドラム ファン 組立て後の航空機用ガスタービンロータ(4) 過給機(4) はずみ車 ポンプ羽根車 工作機械及び一般機械の部品 中型及び大型電機子 特別の要求のある機関の部品 回転機械と不つり合いに関し我々は経験的に, ② 同じ回転体において,偏心量εの許容値は回転体の使用回転数に逆比例する. ことを知っている. この①及び②から,不つり合いが回転機械に及ぼす動的効果を測る尺度として, 不つり合い量 回転体の質量 ×使用回転数 = つり合い良さ と定義できる. 15 2 質量800kg,最高回転速度6,000min-1 U = mεの大きさは何g・mmか. 100 7 5 4 3 2 修 正 面 偏 心 ε (μm ) 3 6. G つり合い良さ mm rad / s (mm / s) 16 G ングするときの許容不つり合い 40 G 1,000 7 5 4 3 2 のロータをG6.3(ISO1940)でバランシ 回転機械の使用最高角速度をω(rad/s)とすると,つり合い良さは, 0 10 との積G = εωで示したものである. U mr M M G 10,000 7 5 4 3 とロータの実用最高角速度ω[rad/s] つり合せ後,不つり合い量Uの残留不つり合いがあると,修正面の偏心εは, 0 25 G 2 許容比不つり合いの大きさε[mm] である. 0 63 G 不つり合い量(U)=質量(m)×回転半径(r) 00 16 ◆ つり合い良さの等級Gは,ロータの 不つり合い量(U)=総質量(M)×偏心量(ε) G 回転体の不つり合い量Uは, 100,000 7 5 4 3 5 2. G 10 7 5 4 3 2 1 G つり合い良さの等級 G0.4 つり合い良さ の上限 0.4 G1 G2.5 G6.3 G16 G40 G100 G250 G630 G1600 4 0. G つり合い良さ の主な等級 1 7 5 4 3 単位:mm/s 2 G4000 0.1 1 2.5 6.3 16 40 100 250 630 1600 4000 0.04 30 4 5 100 2 3 4 5 1,000 2 3 4 5 10,000 2 3 45 100,000 使用最高回転数 n (rpm) 図 つりあい良さの等級と許容残留不つり合い 0 63 G 0 25 G 2面つり合わせの場合 2 00 16 1面つり合わせの場合 10,000 7 5 4 3 G 0 10 ◆ 実用最高回転速度2000rpm,質量 20kgのロータに対して,つり合い良 さ等級G6.3が要求されている.図を 用いて,許容不つり合いはいくらか. G つり合い良さの図面記入例 100,000 7 5 4 3 2 100 7 5 4 3 2 3 6. G (μm ) 16 G 修 正 面 偏 心 ε 40 G 1,000 7 5 4 3 2 5 2. G 10 7 5 4 3 2 1 G G1:310gmm 5 又はつり合い良さG1:310gmm 4 0. G 15 1 7 5 4 3 2 G1 G6.3:51μm 又はつり合い良さG6.3:51μm 又はつり合い良さG1 0.1 0.04 30 4 5 100 2 3 4 5 1,000 2 3 4 5 10,000 2 3 45 100,000 使用最高回転数 n (rpm) 図 つりあい良さの等級と許容残留不つり合い 16 1 G 100 2 3 4 5 1,000 2 3 4 5 10,000 2 3 45 0.04 30 4 5 100,000 3 4 5 1,000 2 3 4 5 10,000 2 3 45 100,000 軸振動測定と 0 25 G 修正面偏芯ε G 0 10 軸受振動測定 絶対値 2 1,000 7 5 4 3 2 軸受振動測定 16 G 100 7 5 4 3 2 3 6. G 修 正 面 偏 心 ε 軸振動測定 40 G 10 7 5 4 3 相対値 5 2. G 軸受振動,相対振動の測定では 2 偏芯量εの直接測定はできない. 1 G 1 7 5 4 3 この場合, 4 0. G G0.4 G1 G2.5 G6.3 G16 0 63 G 10,000 7 5 4 3 (μm ) 1. 2. 3. 4. 5. 2 00 16 2 100 使用最高回転数 n (rpm) 図 つりあい良さの等級と許容残留不つり合い G ◆ ある回転機械が不つり合い状態で あり,振動値が0.62mm/sであった. この機械の回転中心から半径55mm の位置に質量11.8gの修正おもりを取 り付けてつり合せを行い,回転させ たら0.04mm/sの振動が残った.この つり合せによるつり合い良さはどれ か.ただし,この回転機械の使用最 高回転数は3,000rpmであり,回転体 の総質量は5.88kgである. 4 0. G 2 0.1 使用最高回転数 n (rpm) 図 つりあい良さの等級と許容残留不つり合い 100,000 7 5 4 3 5 2. G 1 7 5 4 3 0.1 0.04 30 4 5 10 7 5 4 3 2 4 0. G 2 5 4 3 2 3 6. G 1 G 1 7 5 4 3 (μm ) 16 G 5 2. G 2 G0.4 G1 G2.5 G6.3 G16 40 G 3 6. G 1. 2. 3. 4. 5. 0 10 16 G 10 7 5 4 3 G 40 G (μm ) 面 偏 心 ε 0 25 G 0 10 100 7 5 4 3 2 修 正 面 偏 心 ε 0 63 G G 2 1,000 7 5 4 3 2 00 16 ◆ 1面つり合せができるある回転機械 2 の振動ベクトルが1.2mm/s(rms)∠40° 10,000 である.88g・mmの不つり合い量のお 7 5 もりを付加して回転させた時の振動ベ 4 3 クトルは1.2mm/s(rms)∠180°であっ 2 た. 1,000 この回転機械のつり合い良さはどれか. 57 4 3 ただし,この回転機械の使用最高回転 2 数は3,000rpmであり,回転体の総質量 100 修 は6.0kgである. 7 正 0 25 G 10,000 7 5 4 3 G 0 63 G 00 16 2 100,000 7 5 4 3 G ◆ 全質量3,600kg,回転数N = 4950rpm の蒸気タービンロータの概略図を下に示 す.軸受けスパン18m,左側A軸受は重 心から8m,右側B軸受は重心から10mと する.つり合い品質グレードG = 2.5が指 定されている.許容される不つり合いε, A軸受とB軸受に掛かる質量,A軸受とB 軸受の許容不つり合い量はいくらか. 100,000 7 5 4 3 2 試しおもりを付加して効果ベクトル 0.1 0.04 30 4 5 値から不つり合い量Uを推定して 100 2 3 4 5 1,000 2 3 4 5 10,000 2 3 45 使用最高回転数 n (rpm) 図 つりあい良さの等級と許容残留不つり合い 100,000 つり合い良さを決定する. 17
© Copyright 2026 Paperzz