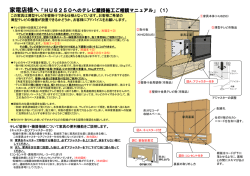
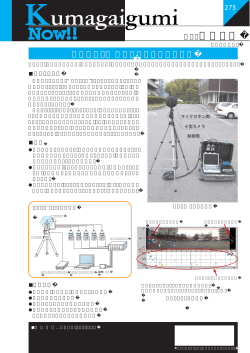
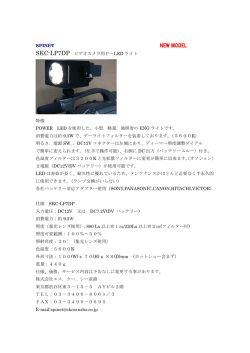
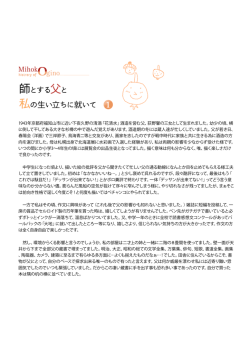
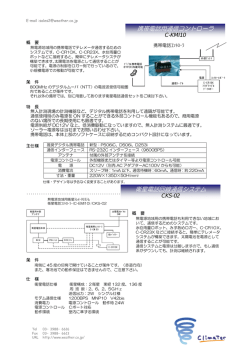
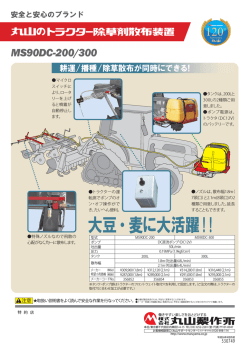
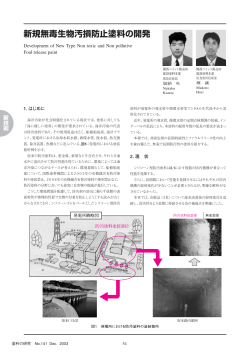
南側から 外部機器へのケーブル カメラをアームの西側にセット 初期設定の位置 F86 変形フォーク式 1眼レフカメラ用赤道儀 (本様は暫定資料です 開発中 今後変更する可能性があります) 本機はフォーク式赤道儀の特徴である子午線付近や天の北極付近での望遠鏡の取り扱いや すさを備えるとともに、フォーク式赤道儀の欠点である鏡筒固定を片持ちフォーク式にするこ とで汎用化しています。 また赤緯軸と直結したガイド鏡軸をカメラと反対側に出すととも に、その回転方向を主鏡(カメラ)に同期させることができました。 ドイツ式赤道儀で観測撮影をする場合カメラ周りからのケーブルなどが、自動導入の時に赤道儀に絡 まないように常に監視しなければなりません。 本機の場合フォーク式の利点に加え、架頭部→極軸→アーム内→赤緯軸にケーブル類を貫通 させることで絡みの問題を解決できました。 また赤緯・赤経軸が危険な領域に向かないよう に小型機ながら機械の両軸に機械的リミットスイッチ等を組み込んで安全対策としています。 さらに、赤経体上部にベルトスイッチ (オプション)を取り付ければカメラとの衝突も防止できます。 主要構造部は強度と温度特性(変型)を最小化するために“鉄”で作ってあります。 ウォーム軸は両軸とも焼き入れ研磨加工を施してあります。 本機にはカメラの重量によって赤経体のバランスを採る必要があり、バランスアームとウエイ トが付属します。 -1- 前ページの写真は天頂に向けた姿ですが。下は東西の地平線へ向けた時の姿勢です。 この写真では接続をしていませんが赤緯回転部から出ているUSBコードとヒーター用コネク ターがカメラと一体で回転しているのがおわかりになると思います。この回転部にUSBハブ を取り付ければ拡張性が高まります。 また、オートガイドから出ている2本のケーブルも絡むことなく移動しています。 接点リードUSB ヒーター と USB 東地平方向 西地平方向 赤緯体回転ヘッドです→ ここには市販されているカメラ等との接続部品を取付け ることができます。 カメラ本体の重心と回転ヘッドの軸芯を合わせるための オフセットプレート(オプション)等を取付けます。 取付ネジ M8×2本(35mmピッチ) M4 M8 M4×2本(40mmピッチ) カメラ西側 天頂付近を向いた状態 極軸望遠鏡とオートガイダー 極軸望遠鏡はアーム先端部に取付盤 (製品に含まれます) を介して簡単に取付けることができます。 ただ、このときにはオートガイダーは外します。 最近のオートガイダーの進化は著しくて、視野内の任意の星を選択できますので、以前のよう にXYマウントは必要がなくなりました。本機ではその特性を生かして赤緯軸に直接ガイダー マウントを取付けて同一回転をさせています。 オートガイダー 極軸望遠鏡 他社製品です 別途お求めください -2- 極軸設定に便利な傾斜計の応用 本機のアームの直線平面を利用して傾斜計をセットす アームの上に傾斜計をのせています れば北極星を探すのに水平(方位)だけ動かせばよい ことになりセッティングと導入作業が楽になります。 (例 パシコ貿易製 ) PRO360型 動力系と制御用通信の方式 本機はハンドボックスとパソコンからの制御を基本としています。 屋外観測などの時、車の中から全てをコントロール可能を目指し、かつバッテリーなどの電源 も暖かい車中に置いて低温による能力低下を低減したいものです。 しかもケーブルの本数も2本から1本にすれば引っ掛け事故の可能性を下げられます。 そのために、電源ケーブルにRS232C信号を乗せて赤道儀へ送る方式を採用しました。 下の写真に示すようにパソコン側に変調器を置き、ケーブルを経て赤道儀内の復調器で動力 用12V系からRS232C信号を分離するシステムです。 1W-RSは基板セット(Box付)での販売もいたします。 変調器 1W-RS-S USB-RS232C 変換ケーブル パソコン側 赤道儀内部側 給電ケーブル 復調器 変調器 PCB 変調器 赤道儀のRS232C F86の動力・通信系統図 PCB PCのRS232C カメラ等 オートガイダー USBハブ USB-A オートガイダー USB-A カメラ パソコン USB-RS232C 変換コード 1W-RS-M 変調器 RA 1W-RS-S 制御基板 復調器 T3-C モーター 基板 T3-M モーター DEC DC12V & RS233C DC12V 給電ケーブル F86 機内 DC12V ハンドボックス -3- T3-H 概略寸法図 本機の東側側面図です ※ カメラの取付には DEC体の回転バランスを取るために オフセット板が必要です。 一眼レフカメラ (300mm F2.8 参照) 初期設定の位置はアームの西側 ・天頂方向の場合を示す ○オートガイダー (SBIG社 FL100mm) 本体は別途ご購入してください 取付金具はF86に付属 アーム西側・DEC軸に直結連動 280mm DECアーム 内部に制御回路を内蔵 ○極軸望遠鏡(ビクセン社製) 可動半 本体は別途ご購入してください 径R 取付金具はF86に付属 アーム先端部へ着脱式 約 2 96 m m カメラ取付座・西側 ここから H.Box ケーブル DC12V-RS232Cケーブル ヒーター電源(DC12V1A)と カメラ用USB引き出し 赤経バランスウエイト 高度調節 ±4°それ以上は三脚で調節 方位調節 ±8° カメラ ・ A.G.用 USB ケーブル(A)2本 三脚 高さ調整 6角ボルト 方位調整 6角穴付ボルト -4- (他社製) 主な仕様 (暫定値であり変更の可能性があります) パソコンからの制御 ハンドボックスからの制御 南北半球 制御方式 恒星追尾パルス数 駆動モーター エンコーダー 天体ソフト 高速自動導入速度 導入分解能(理論値) 市販の天文ソフトからの制御 自動導入・手動移動制御 彗星追尾設定 スタンバイ(ホームポジション)の設定 オートガイドの設定 その他 手動移動 対象天体の追尾速度の設定 赤経・赤緯の補正率の無段階設定 その他 ハンドボックスのロータリースィッチで選択 2相ステッビングモーターとエンコーダーによるクローズドループ制御 120. pps 2相ステッビングモーター(μ-Step) 2相インクリメンタル 対恒星時比 約150倍 実際の導入精度ではありません RA 23時59分9 実際の導入精度ではありません DEC ±89度59 誤差±0.1% at 20°C 恒星時 誤差±0.1% at 20°C 太陽 平均値 月 1日の移動量を入力 彗星 電源 DC12V6A以上 バッテリー又はAC-DCコンバーター 3.3A (at DC12.0V時) 電源電圧が下がると同じ状態でも電流は増加します。 自動導入時の電流 恒星追尾時の電流 0.8A (at DC12.0V時) 使用温度環境 30℃~-10℃ 直射日光・結露・結霜無きこと 市販品 ビクセン社製 ポラリエ極軸望遠鏡を取りつけられます 極軸望遠鏡 オートガイダー(推奨機) 市販品 SBIG社製 ST-iを取り付けられます 各取付金具は付属 スタンバイ機能(ソフトを提供) ○観測終了・中断時の方位・高度の記憶と再起動 観測を終了した時点の任意な方向、又は子午線上の地平付近を選択的に (電源OFF→再起動) 不揮発記憶させ、後日の再起動時にその時点の座標からスタートします。 初期設定作業が不要になります。 ○観測中断時の方位・高度の記憶と再起動 コーヒータイム等のために観測を中断した時点の任意な方向を 不揮発記憶させ、再起動時にその時点の座標からスタートします。 ○対応ソフトを無料添付します。 通信方式 RS232C 1線式 19200bps 変調器(付属)とUSB-RS232C変換ケーブル(市販品)が必要 通信仕様はご希望があれば公開しています。 ウォームギアー(赤経・赤緯) ホィール径 RA,DEC 86φpcd ウォーム RA,DEC 12φ pcd 焼入れ研磨加工 35°±4° それ以外は三脚で可能な範囲で対応してください 対応緯度範囲 方位範囲 ±8°以内 三脚 笠井トレーディング社製 他 カメラ・オートガイダーからのケーブルは架頭部後部から約0.8m程度引き出してあります USBケーブルの引き出し 必要に応じて中継ケーブルなどで延長してください -5-
© Copyright 2026 Paperzz