「非線形有限要素法」
サンプルページ
この本の定価・判型などは,以下の URL からご覧いただけます.
http://www.morikita.co.jp/books/mid/092021
※このサンプルページの内容は,初版 1 刷発行当時のものです.
親愛なる
Deise, Patricia & André,
Mira, Nikola & Nina,
Janet, Kathryn & Lisa
へ
COMPUTATIONAL METHODS FOR PLASTICITY: THEORY AND APPLICATIONS
by EA de Souza Neto, D Perić, DRJ Owen
©2008 John Wiley & Sons Ltd
Japanese translation rights arranged directly with the authors
through Tuttle ‒ Mori Agency, Inc., Tokyo
i
前書き
本書の目的は,弾性体と非弾性体の微小ひずみと有限ひずみ問題を対象として,
その有限要素解析に用いられる計算手法について詳細に記述することである.特に,
様々な材料構成モデル(現象論的な超弾性体,弾塑性体,弾粘塑性体)の導出・解説
とともに,関連する数値解析の手続きと,準静的問題の有限要素解析コンピュータプ
ログラムへの実装に際しての実践的な問題に焦点をあてる.ただし,著者らは,本書
が計算塑性力学におけるトピックを網羅すると主張するつもりはない.むしろ,本書
は,有限要素法による固体の非線形力学挙動の数値シミュレーションに際して,必要
となる理論と数値解析の手続きを適度なバランスをとって提供する一つの試みであ
る.また,本書で紹介する計算手法の多くは,付録の HYPLAS と名付けた FORTRAN
で書かれたコンピュータプログラムと対応して解説されている.このプログラムは,
各計算手法の実際的な実装方法を例示するために,特別に書き下ろしたものである.
著者らが本書の執筆に着手したときには,主に自身の研究の経験に基づいた,ど
ちらかといえば簡易な教科書を想定していた.その内容の大半が,微小ひずみおよ
び有限ひずみで記述した塑性構成モデルに関して,有限要素解析プログラムへの実
装に必要とされる計算アルゴリズムの記述で占められるものであった.しかし,原
稿が仕上がってくると,そのようは本は計算塑性力学および関連分野の研究に既に
精通している読者にとってはふさわしいのであろうが,基礎レベルから塑性問題に
関する計算手法を学びたいと考えている読者にとっては必ずしも有用でないことに
気づいた.実際,そのような本の場合,弾塑性理論の基礎やテンソル解析,非線形
連続体力学(特に非線形運動学),有限変形の超弾性理論,そして一般的な(エネル
ギー)散逸をともなう固体の構成則理論などのトピックになじみのない読者は,そ
れらに関する相当量の知識を他書から仕入れておく必要がある.したがって,我々
は初期の計画を徐々に見直し,ついにはかなりの量の基礎理論を組み入れることで,
自己完結型の教科書に仕上げることにした.また,原稿を書きながら,損傷力学,異
方性塑性論および有限ひずみをともなう単結晶の塑性論などのより先進的な(そし
て興味深い)トピックを加えることにした.このような経緯から,著者らの執筆作
業は,当初の予定より少なくとも 3 倍の時間を要し,原稿量は約 3 倍に膨れあがって
しまった.それでもまだ,本書に含めておきたい興味深いトピックが多く残ってい
たが,時間と紙面の制約から,さらなる追加は断念せざるを得なかった.したがっ
ii
前書き
て,当初計画していた内容よりは現在のものに満足しているが,いかなる意味にお
いても本書は最適であるとは思っていない.ただ,従来の文献にみられる溝を埋め
るためものとして本書を提供できればよいと考えており,読者が本書から何らかの
得るものがあれば幸いである.
本書は,三つのパートで構成されている.第 I 部は,本書で扱う内容に即して基礎
的事項を解説している.具体的には,初等テンソル解析,連続体力学と熱力学,準
静的な非線形固体力学問題に対する有限要素法,ならびにコンピュータプログラム
HYPLAS を説明している.第 II 部は,微小ひずみ問題を扱っており,塑性の数理モデ
ルとその有限要素解析プログラムへの実装に必要な数値解析上の手続きを解説して
いる.具体的には,速度非依存型(弾塑性)および速度依存型(粘弾塑性)の構成モ
デルに加えて,異方性弾塑性モデルや延性的な損傷モデルなどのいくつかの先進的
なモデルも扱っている.最後に第 III 部では,有限ひずみ問題に焦点をあてている.
超弾性構成モデルの理論とそれを有限要素解析プログラムへ実装する際の手続きに
ついて詳細に解説した後に,有限ひずみ理論の枠組みにおける塑性論を説明してい
る.弾塑性乗算分解を含む運動学を適用した超弾性構成モデルと亜弾性構成モデル
について,関連した数値解析の手続きと合わせて解説している.最後には,有限変
形理論の枠組みにおける単結晶の塑性モデルとその有限要素解析プログラムへの実
装方法を解説するとともに,有限変形問題における擬似非圧縮性に対応した有限要
素も紹介している.
著者らは,本書を仕上げるにあたってたくさんの方々からの直接的あるいは間接的
支援を頂いた.以下,それらの方々への深甚な謝意を表すことでこの前書きを終え
たい.まず,J.M.P. Macedo には,本書を著すことになったはじめの頃,コンピュー
タプログラム HYPLAS の設計に関する貴重な提案を数多くいただいた.R. Billardon
とは,損傷モデルについての多くの啓発的な議論を重ね,R.A. Feijóo と E. Taroco
とは,長期にわたって実り多い議論を交える多くの機会を得た.また,M. Dutko に
は,本書に示されている計算結果のいくつかを提供していただき,Y.T. Feng とは,
弧長法に関する有益な議論を交わすことができた.F.M. Andade Pires には,F-bar
パッチ要素の開発に際して重要な貢献,および関連する図の提供だけでなく,本書
の初稿の全面的な校閲作業にも尽力いただいた.P.H. Saksono には,等誤差マップ
(isoerror map)の作成を手伝っていただいた.また,A. Orlando は,全ページにわ
たって文字どおり“スキャン”することで,様々な類の不整合をみつけることに尽力い
ただいた.そして,L. Driemeier,W. Dettmer,M. Vaz Jr.,M.C. Lobão, M. Partovi,
D.C.D. Speirs,D.D. Somer, E. Saavedra, A.J.C. Molina,S. Giusti,P.J. Blanco に
は,原稿の多くの部分の校閲にあたって,みつけにくいミスを見いだすとともに,い
前書き
iii
くつかの重要な改善案を示して頂いた.最後になるが,本書が扱っている多くのト
ピックについての啓蒙的で激しい議論を(しばしばビーチやバーにおいて)交わし
た,同僚であり友人でもあった故 Mike Crisfield には特別な謝意を表したい.
E. A. de Souza Neto
D. Perić
D. R. J. Owen
Swansea にて.2008 年 3 月
iv
訳者前書き
計算力学 (computational mechanics) の黎明期から 80 年代前半までの展開期におい
ては,我が国の研究者はその発展に大きな役割を果たしていた.産業界での有限要素法
(FEM) の積極的な利用を意図した普及活動はもちろん,国際交流も活発であった.ま
た,世界的な流れに追従するために,英語で著された計算力学に関する教科書の翻訳・
出版も精力的に行われた.本書の前身でもある「Finite Elements in Plasticity, Theory
and Practice, Pineridge Press (1980)」も当時の非線形解析に関する最先端の理論と実
践的な技術が網羅されているということで,非線型解析プログラム研究会という組織
の訳者たちが輪講を通して翻訳したものが和訳本として発刊されている [訳者代表:山
田嘉昭,塑性の有限要素法,科学技術出版 (1988)].しかし,90 年代には,GUI を備
えた非線形解析プログラムの普及も進み,その計算の中身を知らなくても利用できる
環境が整ってきたこともあって,そのようなフォローアップ作業は停滞した(そのほ
かにも理由は複数考えられるが特定はできない)
.ところが,この間の計算力学,特に
非線形 FEM の理論と関連技術はめざましい発展を遂げ,80 年代前半までの手法は修
正あるいは駆逐されながら,革新的な理論構築も行われ,ほぼ体系化されたといって
よい.お叱りを覚悟でいうが,我が国の非線形計算力学分野は,この間にガラパゴス
化したように思える(日本の悪い癖かも知れない)
.
私は,この間 (1992 年から 3 年ほど) 米国ミシガン大学にて菊池昇先生に師事した
ために,運良く計算力学を創ってきた人たちの雰囲気やにおいに触れる機会に恵まれ,
必然的に非線形計算力学の世界標準を学ぶこともできた.帰国後も自然にそういった
世界の潮流を意識しながら,研究や学生の指導を行うことができた.当時 (90 年代後
半から 2000 年代前半にかけて),自分の学生たちにもできる限り非線形計算力学分野
における「最先端」の論文や「世界標準」の書籍を読んでもらい,意図的に既存の和
書からは遠ざけた.そういった背景もあり,この原著の価値を理解し,正しく解釈し
て本書を完成させる仲間として彼らおよび当時の同僚たちを選んだ.加えて,この原
著の著者らの所属する英国 Swansea 大学への留学経験をもち,私と仕事上でも交流の
あった京都工芸繊維大学の秋山雅義教授にも訳者の推薦をお願いした.要するに,本
書の共訳者は,非線形計算力学の「世界標準」を理解し,志を同じくする仲間たちで
ある.
90 年代以降の成果も踏まえて著された固体の非線形 FEM に関する英語の教科書は,
訳者前書き
v
いくつか存在する.そのなかから,この原著「Computational Methods for Plasticity」
を選んで翻訳することになった理由は,もちろん内容の価値が高いからであるが,現
著者との交流があったことも影響が大きい.特に,訳者の一人である物質材料研究機
構の渡邊育夢氏が,私の研究室で学位を取得後,日本学術振興会の特別研究員として
英国に渡って彼らとの共同研究を行うことで,親交はさらに深まった.議論を重ねる
うちに,原著者 Eduardo,George,Roger の 3 人とは,計算固体力学に対する価値観
と,理想とする書籍像を共有していることもわかった.そして,2008 年 7 月にイタリ
アのベニスで開催された世界計算力学会議 (WCCM8) のおり,彼らと繁華街のバーで
グラッパを飲み交わしながら翻訳の話がまとまったと記憶している.また,これと前
後して,先に紹介した秋山氏も翻訳を希望していると聞いたため,本書の共訳者に加
わってもらうことになった.
そういった経緯で翻訳作業がはじまったが,実のところ,私には原著が固体の非線
形計算力学の教科書としてベストであるといえる自信はない.この分野はそれほどに
奧が深く広範なので,1 冊の本で網羅することは不可能である.しかし,少なくともこ
の原著は,非線形 FEM における次の主要項目を網羅している点で学習するに値する.
① 非線形連続体力学(力学理論)
• 微小変形理論および有限変形理論
• 熱力学および構成則理論(熱力学法則と超弾性・弾塑性・粘弾塑性・損傷モデ
ルなど)
② 有限要素離散化と非線形解法(数学理論・数値解析手法)
• 応力積分アルゴリズム(予測子・リターンマッピングなど)
• 線形化・整合接線係数・高性能有限要素
本書は 3 部構成となっており,まず第 I 部では,連続体力学,非弾性構成則を初期値
問題とみなした定式化,および平衡方程式を陰解法で解くための計算力学理論の復習
を主眼としている.第 II 部では,構成則の初期値問題に差分近似を適用する離散化と
陰的積分アルゴリズムが,材料モデルの種類ごとに丁寧に解説されている.また,従
来ほとんど扱われることがなかった,異方性塑性モデル,損傷モデル,Cam ‒ Clay モ
デルなど,特殊であるが実務的にも活用されている重要な材料モデルの定式化の詳細
とともに,プログラムへの具体的な実装方法などをソースコードを示しながら説明し
ている.さらに,相当量のページを割いているゴム材料の損傷挙動のモデル化,金属
の単結晶のすべりに基づく結晶塑性モデルに関する解説は希少で価値も高い.このよ
うに,本書は,弾塑性構成則を中心とする非弾性数理モデルの数値解法に重点をおい
てコンピュータプログラムへの実装方法まで解説している点だけでも既存の教科書に
はない特徴を有するが,さらに第 III 部では,有限変形問題に対する標準的な取り扱
vi
訳者前書き
いも詳細に解説している点を強調したい.我が国で刊行された非線形 FEM に関する
ほとんどすべての書籍が,いわゆる速度形 (rate form) を用いた構成則の定式化に終始
しているのに対して,本書はそれに加えて 90 年前後の計算塑性力学の発展を象徴する
成果である「速度形によらない定式化」とその離散化・計算アルゴリズムを詳説して
いる.ここでいう速度形の構成則とは,たとえば弾塑性問題において,流れ則は塑性
ひずみ速度の発展式として与えられることに合わせて弾性変形も速度形で表したモデ
ル(亜弾性モデル)を用いるものであり,これは「ひずみ速度の弾塑性加算分解」を
基調とした微小変形理論に基づく弾塑性論の有限変形問題への直接的な拡張とみなさ
れる.本書はこの定式化も十分な解説を行っているが,有限変形理論の枠組みにおけ
る「変形勾配の弾塑性乗算分解」を出発点とする定式化・アルゴリズムに関してこれ
ほど具体的に示された書籍は少ない.
90 年代後半,我が国ではまだ,これらの内容が当時の世界標準となったことは一部
の研究者を除いて認知されていなかった.そのことが,同時期,世界の計算力学分野
における日本のプレゼンスも低かったことに,少なからず関連している.私はこの状
況に多少の焦りを感じながら研究活動・国際交流を行っていたが,当時から同様の危
機意識をもって我が国の非線形計算力学分野を牽引していた慶応大学の故野口裕久先
生の存在は心強かった.残念ながら 2008 年 8 月に他界されてしまったが,彼を中心
に据えて行ってきた学会活動などが実を結び,現在では日本のプレゼンスもかなり上
がってきている.本書の刊行にあたって,野口先生ならばきっと「どうせなら自分で
書いたらどうか?」と叱咤激励されるところだろうが,少なくともこの翻訳が,
(とも
に目指した)日本における固体の非線形計算力学の発展に寄与することは否定しない
はずである.
最後に,関係者の皆様,本訳書の発刊を待っていてくださった方々,そしてすべて
の読者に対して,翻訳作業を開始してから 4 年近くも費やしてしまったことを心より
お詫びを申し上げるとともに,推敲も十分ではなく読みやすい日本語にできなかった
箇所も散在することをご容赦頂きたい.
監訳者
寺田 賢二郎
2012 年 5 月
vii
目 次
第 I 部 基礎編
第1章 序 論
3
1.1
本書のねらいと対象範囲
3
1.2
本書の構成
5
1.3
記号・表記について
9
第 2 章 テンソル解析の基礎
16
2.1
ベクトル
16
2.2
2 階のテンソル
18
2.3
高階のテンソル
29
2.4
等方テンソル
32
2.5
微
34
2.6
非線形問題の線形化
41
第 3 章 連続体力学と熱力学の基礎
44
分
3.1
変形の運動学
44
3.2
微小変形
62
3.3
力と応力
66
3.4
熱力学の基本法則
74
3.5
構成則理論
76
3.6
弱形式の平衡方程式・仮想仕事の原理
85
3.7
準静的初期値・境界値問題
87
第 4 章 準静的な非線形固体力学問題に対する有限要素法
91
4.1
変位法に基づく有限要素
4.2
経路依存材料とその増分解析法
104
4.3
有限ひずみの定式化
112
4.4
不安定平衡/弧長法
118
93
第 5 章 プログラムの概略
127
5.1
はじめに
127
5.2
メインプログラム
129
5.3
データ入力と初期化
129
viii
目 次
5.4
増分解法の概略
133
5.5
材料モデルと要素のモジュール性
139
5.6
要素の実装と管理
143
5.7
材料モデルの実装と管理
146
第 II 部 微小ひずみ問題
第 6 章 数理塑性論
155
6.1
現象論的側面
156
6.2
1 次元構成モデル
157
6.3
一般化弾塑性構成モデル
165
6.4
古典的な降伏基準
175
6.5
塑性流れ則
189
6.6
硬化則
198
第 7 章 微小変形塑性問題の有限要素法
214
7.1
コンピュータプログラムへの実装に向けての準備
7.2
弾塑性構成方程式に対する一般化時間積分アルゴリズム
216
7.3
適用例:等方硬化 von Mises モデルの時間積分アルゴリズム
242
7.4
コンシステント接線係数
256
7.5
von Mises モデルを用いた数値解析例
273
7.6
応用例:非線形複合硬化 von Mises モデル
286
第 8 章 その他の基礎的な塑性モデルの数値計算
215
294
8.1
Tresca モデル
295
8.2
Mohr ‒ Coulomb モデル
326
8.3
Drucker ‒ Prager モデル
359
8.4
数値解析例
380
第 9 章 平面応力状態における塑性問題
392
9.1
平面応力条件下の塑性問題の基礎
392
9.2
Gauss 積分点レベルにおける平面応力条件の拘束
396
9.3
構造レベルにおける平面応力条件の拘束
403
9.4
平面応力射影された塑性モデル
407
9.5
数値解析例
426
9.6
応力が拘束されるその他の状態
435
第 10 章 先進的な塑性モデル
10.1
地盤材料のための修正 Cam-Clay モデル
441
441
目 次
ix
10.2
地盤材料のためのキャップ付 Drucker ‒ Prager モデル
448
10.3
異方性塑性モデル:Hill・Hoffman・Barlat ‒ Lian モデル
453
第 11 章 粘塑性
476
11.1
粘塑性モデル:現象論的特徴
477
11.2
1 次元粘塑性モデル
478
11.3
von Mises 型の多次元モデル
487
11.4
一般的な粘塑性構成式
492
11.5
一般的な数値解析の枠組み
497
11.6
応用:von Mises 型粘塑性モデルのコンピュータプログラムへの実装
503
11.7
例
510
題
第 12 章 損傷力学
513
12.1
固体材料における内部損傷の物理的側面
514
12.2
連続体損傷力学
516
12.3
Lemaitre による弾塑性損傷理論
521
12.4
単純化 Lemaitre モデル
530
12.5
Gurson のボイド損傷理論
542
12.6
損傷モデルに関する最近の話題
550
第 III 部 有限ひずみ問題
第 13 章 有限ひずみ超弾性体
567
13.1
超弾性モデル:基本的な考え方
568
13.2
超弾性モデルの具体例
574
13.3
平面応力問題における等方性超弾性モデル
580
13.4
接線係数:弾性テンソル
585
13.5
応用:Ogden モデルの実装
589
13.6
数値解析例
599
13.7
損傷をともなう超弾性体:Mullins 効果
610
第 14 章 有限ひずみ弾塑性
623
14.1
有限ひずみ塑性:概説
624
14.2
1 次元の有限ひずみ塑性モデル
625
14.3
超弾性構成則に基づく一般的な乗算分解塑性モデル
629
14.4
一般的な弾性予測子/リターンマッピングアルゴリズム
643
14.5
空間表記のコンシステント接線係数
652
14.6
主応力空間で記述したモデルのコンピュータプログラムへの実装
654
14.7
平面応力条件下の有限ひずみ塑性問題
656
x
目 次
14.8
有限ひずみ粘塑性
661
数値解析例
662
14.10
速度形構成則:亜弾性構成則に基づく塑性モデル
672
14.11
移動硬化をともなう有限ひずみ塑性モデル
690
14.9
第 15 章 有限ひずみ問題における非圧縮固体材料のための有限要素
706
15.1
F-bar 法
708
15.2
拡張ひずみ仮定法
729
15.3
u/p 混合法
744
第 16 章 有限変形異方塑性モデル:単結晶塑性
753
16.1
物理的側面
754
16.2
塑性すべりと分解せん断応力
755
16.3
単結晶体のシミュレーション:簡単なレビュー
756
16.4
単結晶体の一般的な連続体力学モデル
757
16.5
一般的な積分アルゴリズム
762
16.6
平面 2 重すべりモデルのアルゴリズム
769
16.7
空間表記のコンシステント接線係数
778
16.8
数値計算例
782
16.9
粘塑性単結晶体
789
付録 A
対称テンソルの等方関数
794
A.1
等方スカラー値関数
794
A.2
等方テンソル値関数
796
A.3
2 次元問題
798
A.4
3 次元問題
802
A.5
特殊な等方テンソル値関数
806
A.6
その他の計算手順
808
付録 B
テンソル指数関数
809
B.1
テンソル指数関数
809
B.2
テンソル指数関数の微分
812
B.3
テンソル指数関数写像を用いた積分演算子
814
付録 C
仮想仕事の線形化
816
C.1
微小変形
816
C.2
有限ひずみおよび有限変形問題
818
付録 D テンソル計算のための行列表記
D.1
2 階のテンソル
821
821
目 次
D.2
4 階のテンソル
xi
823
参考文献
826
索 引
846
本書で紹介するプログラムのソースコードは,
以下の URL からダウンロードできます.
http://www.morikita.co.jp/soft/92021/index.html
3
第1章
序 論
過去 30 年の間に,有限要素法を中心とする計算手法の利用は,学術および産業界におい
て,非線形固体力学の問題を数値的に解くための常套手段となってきた.
弾塑性理論あるいは粘弾塑性理論の枠組みで非線形材料の挙動をモデル化することは容
易ではなく,黎明期には,これらの計算手法は主として微小変形・微小ひずみ問題に限られ
て利用されていた.そして,その通用対象は限定的であったし,解析も極めて専門的な知
識を有するユーザーのみが利用可能で,とてもユーザーフレンドリーとはいえない未成熟
なソフトウェアを用いて行われていた.ところが,その後,計算塑性力学 (computational
plasticity) として一般に認知されたこの分野は,瞠目すべき発展を遂げた.固体の材料挙
動を正確に表現しうるモデル開発に対して産業界からの継続的な要求があったことに加え,
コストを抑えながらも計算機の能力が着実に向上してきたことが推進力となって,計算塑
性力学における計算手法が進化を遂げ,結果として煩雑な操作を自動化したうえで高精度
の解析ができるパッケージソフトウェア群が世に出ることとなったのである.今日では,
これらのソフトウェアはごく当たり前の道具として,増え続けるエンジニアや科学者たち
によって利用されている.そして,そのような計算手法を適用可能な実用上の問題の種類
は極めて広範にわたり,適用範囲は,構造物の応力解析 (stress analysis) や土質力学 (soil
mechanics) および岩盤力学 (rock mechanics) の諸問題から,金属加工のような生産プロ
セスのシミュレーションにまで及んでいる.また,食品加工や鉱山の工法,そして生物学
的な細胞組織の挙動に関する解析など,従来では考えられないような分野に適用されるま
でになってきている.これらの問題の多くは,極端に大きなひずみが生じることと,かな
り複雑な構成式によって記述される材料挙動が特徴として共通している.
1.1 本書のねらいと対象範囲
本書の主な目的は,有限要素法 (finite element method) による弾性および非弾性固
体の微小ひずみおよび有限ひずみ問題の解析に用いられる数値計算手法を詳述すること
である.特に,実際の数値計算の手順とコンピュータプログラムに実装する際に直面す
る課題に加え,様々な構成モデル(現象論的にモデル化された超弾性体,弾塑性体,そ
して粘弾塑性体の理論に基づくもの)の導出と解説にも力を入れている.また,本書で
4
第1章
序
論
は,基礎としての等方性材料の微小ひずみ理論から,異方性の扱いや,より洗練された
有限ひずみ理論までを対象とする.また,本書中で解説する手法の多くは FORTRAN
言語で記述された,HYPLAS というコンピュータプログラムに実装され,付録として提
供されている.そのソースコード訳注 は部分的に本書中にも記載されており,それら
は該当する数値計算手法と実際のコンピュータプログラムへの実装とを関連付けるう
えで助けとなるはずである.強調しておきたいもう一つの重要な特徴は,本書で説明
した多くの構成モデルあるいは計算手法の性能が,数値計算により例証されているこ
とである.このことは,計算塑性力学分野においてソフトウェアの研究開発に従事し
ている人たちにとっても,実用的な見地から興味深いはずである.
できる限り自己完結型となるように,本書には非常に多くの基礎的な理論が盛り込
まれている.具体的には,初等テンソル解析におけるいくつかの基礎項目,連続体の
非線形力学と熱力学への手引き,微小ひずみおよび有限ひずみを用いて記述される弾
塑性理論と粘塑性理論,超弾性体の理論,非線形固体力学問題における有限要素法な
どである.読者がこれらに関する正確な知識をもっていることは,シミュレートする
問題を明確に理解するうえで必須である(と確信している).
しかし,再三繰り返すが,計算手法に焦点をあてているので,基礎理論の分量と程
度は,上記の課題に取り組むのに必要な最小限の内容に抑えてある.たとえば,テン
ソル解析,連続体力学および熱力学の解説では,よく知られた関係式の証明は省いて
いる.また,塑性や粘塑性,超弾性理論については,最も重要な性質と定式化に不可
欠な関係式とともに,対応する材料構成モデルを与えるのみにとどめておく.また,
初期値・境界値問題についての材料安定性,解の存在・唯一性の問題などについては,
特別な事情がない限り触れないこととする.
1.1.1
想定している読者層
本書が想定している読者は,計算連続体力学 (computational continuum mechanics)
の分野における大学院生,研究職のエンジニアと科学者である.本書を読み進めるに
は,固体力学(特に線形弾性論)
,有限要素法,ならびに常微分方程式の近似解法に関
する基礎知識が必要である.また,ベクトルとテンソルの演算についての初等的な理
解があることも大いに助けになるだろう.本書で説明した計算手順のコンピュータプ
ログラムへの実装を試みる読者は,これらの知識以外に,プログラミング言語である
FORTRAN を基本的なレベルで理解しておく必要がある.ここで,なぜ FORTRAN
言語を選択したかについて述べておくべきであろう.その主な理由は以下のとおりで
訳注“source code”とは,文字どおりコンピュータプログラムの「源 (source)」であり,コンパイラを介して
実行ファイルに変換される,計算手続きがテキスト形式で記されたプログラムリストを指す.
1.2
本書の構成
5
ある.
① 一般に,工学計算の分野において,特に有限要素法を用いる人たちの間で広く使
われている.
② HYPLAS のようなそれほど複雑ではないコンピュータプログラムを書くには,手続
き型のプログラミング言語が適切である.HYPLAS に,進歩的なプログラミング
の概念(たとえば,オブジェクト指向プログラミング)を用いるとなると,ソー
スコードに内在する本質的な概念の学習のほかに,言語の理解というさらに困難
な課題に直面することになってしまう.
③ 短いアルゴリズム(たとえば本書の主題でもある弾性や非弾性材料モデル)を実
装する場合,その計算手順が比較的読み取りやすい.
1.2 本書の構成
本書は,上記のねらいに添った形で,次の 3 部から構成されている.
• 第 I 部:理論的基礎
本部では,第 II 部と第 III 部で扱われる応用的な話題の
基礎として重要な考え方と理論を解説している.扱っている内容は以下のとおり
である.
・初等テンソル解析
・連続体力学と熱力学入門
・準静的な非線形固体力学問題に対する有限要素法
・コンピュータプログラム HYPLAS の解説
• 第 II 部:微小ひずみ問題
本部では,微小ひずみ理論の枠組みで塑性論を解説
するとともに,その有限要素法プログラムへの実装を念頭において,関連する数値
計算の手順を紹介している.対象として扱うモデルは速度非依存型(弾塑性)と
速度依存型(粘弾弾粘塑性)理論などを含む比較的広い範囲の弾塑性構成則であ
る.主な内容は次のとおりである.
・微小ひずみ塑性理論訳注 1
・微小ひずみ塑性問題のための有限要素訳注 2
・異方性を含む先進的な塑性モデル
・粘塑性問題
・損傷を考慮した弾塑性問題
訳注 1 直訳は「微小ひずみ理論の枠組みにおける塑性理論」である.
訳注 2 直訳は「微小ひずみで記述される塑性問題のための有限要素法」である.
6
第1章
序
論
• 第 III 部:有限ひずみ問題
本部では,有限ひずみ超弾性および弾塑性問題訳注 1
について説明している.ここで対象とするモデルと,それをコンピュータプログ
ラムへ実装する手続きは,第 II 部で扱っている題材よりも明らかに複雑になる.
この複雑さは,有限ひずみの運動学によるものであるので,第 III 部を読み進むう
えでは第 I 部の第 3 章で述べる有限変形(ひずみ)の運動学を正しく理解してお
くことが必須となる.ここで扱う項目は次のとおりである.
・有限ひずみ等方性超弾性問題
・有限ひずみ塑性問題
・有限ひずみ問題における非圧縮性を扱うための有限要素技術
・有限ひずみ単結晶塑性論訳注 2
本書は,16 の章と四つの付録から構成されている.以下に,それぞれの内容を要約
しておく.
第 1 章は,これ以降本書における変数や記号の一般的な表記方法を説明する.
第 2 章では,初等テンソル解析について説明する.本書では,テンソルの表記に,意
味を誤ることが少ない固有表記 (intrinsic notation) あるいはコンパクト表記 (compact
notation)訳注 3 を主に用いるため,ここでもその表記を用いて解説する.
第 3 章では,連続体力学と熱力学の基礎を解説する.ここでの変形の運動学と平衡
則,そして構成則についての説明は,後続章で解説する各理論の理解を深めるために
必須である.
第 4 章では,準静的な非線形固体力学問題の解析のための有限要素法 (finite element
method) について説明する.ここで利用する材料モデルは,第 3 章で扱っている,散
逸を考慮した一般的な構成則である.
第 5 章では,本書で説明する手法の多くが実装されている,コンピュータプログラ
ム HYPLAS の大まかな構成を説明する.ただし,プログラムの説明をやや簡潔にして
いるため,より詳細にプログラムの内容を知りたい場合は,FORTRAN のソースコー
ド中のコメントと,本文中に記載した手順を相互に参照しながら理解に努めて頂きた
い.おそらく,研究開発の目的で HYPLAS を用いようとする人たちにとっては,このよ
うな方法のほうが理解を深められるはずである.
第 6 章では,微小ひずみ数理塑性論を解説する.具体的には,現象論的な時間非依存
の塑性問題に関する数学モデルについて説明し,基本モデルである Tresca,von Mises,
訳注 1 直訳は「有限ひずみを用いて記述される超弾性体および弾塑性体の問題」である.
訳注 2 直訳は「有限ひずみ理論の枠組みにおける単結晶の(異方性)塑性論」である.
訳注 3 インデックス(添字)を用いたテンソルの成分表記ではなく,成分と基底を内包した「太字」表記のこと
である.本書では「コンパクト表記」という表現に統一する.
1.2
本書の構成
7
Mohr ‒ Coulomb,そして Drucker ‒ Prager の降伏条件について,最も一般的に用いら
れている塑性流れ則と硬化則とともに解説する.
第 7 章では,弾塑性体の構成則を用いた初期値・境界値問題を有限要素法で解く際
に必要な数値解析手法について述べる.von Mises の降伏条件とともに,等方硬化則,
および等方硬化と移動硬化とを組み合わせた複合硬化則を用いる塑性モデルの適用に
関して詳述する.そして,プログラム HYPLAS で最も関連の深いサブルーチンを,その
ソースコードを示しながら詳細に説明する.
第 8 章では,Tresca,Mohr ‒ Coulomb,そして Drucker ‒ Prager の降伏条件を用い
た塑性モデルを,コンピュータプログラムに実装する方法を詳述する.第 7 章と同様,
プログラム HYPLAS 中で該当するサブルーチンのソースコードを示しながら詳細に説
明する.
第 9 章では,平面応力条件下における塑性変形の数値的な扱い方について述べる.
いくつかの異なる選択肢を紹介し,それらの相対的な利点と限界を論じるとともに,
プログラミング上で重要ないくつかの要点についてソースコードの一部を示しながら
説明する.章末では,ここで導入した概念のほかの応力拘束状態への適用に関して簡
潔に説明する.
第 10 章では,先進的な弾塑性モデルについて述べる.土質材料のための修正 Cam ‒
Clay モデル,地盤材料のためのキャップ付 Drucker ‒ Parger モデル,そして金属材料
の異方性を考慮した Hill のモデル,Hoffman モデル,および Barlat ‒ Lian モデルの
各々について,コンピュータプログラムへの実装方法を解説する.これらのモデルを
実装するためには,既に第 7 章や第 8 章で述べた基本モデルに対する数値計算手法を
単に特殊化すればよい.ただし,この章で扱うモデルにはそれぞれ特有の複雑さがあ
るので,実際の実装内容は基本モデルの場合に比べて,かなり複雑になる.
第 11 章では,まず第 3 章で紹介した散逸材料に対する構成則理論の枠組みで粘弾塑
性理論を導入する.このとき,
(速度非依存型の)塑性論は粘塑性の特別なケースとし
て導出されることを確認する.また,一般的な粘塑性モデルに対する数値計算手法に
ついては,前の章で弾塑性モデルに対して適用した手順を踏襲しながら解説する.そ
して,その手法を von Mises 型粘塑性モデル訳注 1 に適用する場合について詳述する.
第 12 章では連続体損傷力学について述べる.これは巨視的な破壊発生に先立って材
料が劣化していく過程をモデル化する連続体固体力学の派生分野である.いくつかの
弾塑性損傷モデルについてレビュー訳注 2 し,関連する計算手法とともに,それらのコ
ンピュータプログラムへの実装方法について詳述する.
訳注 1 正確には「von Mises の降伏基準に基づく塑性モデルと類似の粘塑性モデル」である.
訳注 2“review”は,その研究分野が発展してきた過程を過去の文献を引用しながら調査することである.
8
第1章
序
論
第 13 章では,有限ひずみ超弾性モデルを紹介する.基礎をなす理論をレビューし
た後,最もよく使われているいくつかの等方性モデルを提示する.また,Odgen モデ
ルを有限要素法プログラムへ実装する方法を詳しく述べるとともに,HYPLAS のソース
コードから関連する部分を抜粋して解説する.さらに,章末では,いわゆる Mullins
散逸効果に対して超弾性損傷理論を適用したモデルについて述べる.この考え方は延
性的な弾塑性損傷について第 12 章で既述したものと密接に関連している.
第 14 章では,有限ひずみ弾塑性モデルを紹介するとともに,それを有限要素法のコ
ンピュータプログラムに実装する手順を述べる.主な論点は,変形勾配の乗算分解に
基づく運動学を適用した超弾性構成則を用いる有限ひずみ塑性理論であり,実際にプ
ログラム HYPLAS に実装されているモデルもこの類のものである.しかしながら,解
説に漏れがないように,いわゆる亜弾性構成則に基づく理論についても言及する.取
り上げる材料のほとんどは等方的な弾塑性体に限定しており,わずかではあるが章末
で移動硬化という形で異方性を取り上げている.
第 15 章では,有限ひずみ塑性モデルの有限要素法プログラムへの実装に関連して,
非圧縮性の扱いについて解説する.この種の議論は,非圧縮の極限に近い場合には,次
数の低い要素の使用が強く望まれる大規模な有限ひずみの解析を行う際には非常に重
要である(これらの要素は,特殊な処理を施さない限り一般的には不適切である)
.本
章では,これを解決するための方法として,F-bar 法,拡張ひずみ仮定 (EAS) 法,そ
して u/p 混合法を紹介する.
最後に,第 16 章では有限ひずみ理論の枠組みで単結晶の塑性挙動を記述する一般的
なモデルを紹介し,あわせて有限要素法の計算にそれを用いるにあたって必要となる
数値計算手順を述べる.一般的なモデルを特殊化した,平面二重すべり系を用いたモ
デルをコンピュータプログラムに実装する方法を詳述する.このモデルはプログラム
HYPLAS にも導入されている.
以上の章に加えて四つの付録を付けた.付録 A では,本書を通して広く用いられて
いる対称テンソルを独立変数とする,等方性スカラー値関数およびテンソル値関数を
解説する.ここでは,実際に関数の値やその微分を計算する際に用いられる,いくつ
かの重要な基本的性質と公式を提示する.付録 B はテンソル指数関数を解説する.テ
ンソル指数関数は,第 14 章と第 16 章において有限ひずみ塑性モデルを取り扱う際に
用いられる.付録 C では,微小ひずみと有限ひずみ理論の枠組みで線形化された仮想
仕事の式を導く.ここで導出された式は,有限要素法において接線剛性行列の組み立
て(アセンブリング)に必要となる接線演算子の基本公式を提供するものである.最
後に,付録 D では,2 階と 4 階のテンソルについての有限要素法プログラム内での扱
い,特に配列への格納方法や積の演算方法などについて解説する.
216
7.2
第 7 章 微小変形塑性問題の有限要素法
弾塑性構成方程式に対する一般化時間積分アルゴリズム
第 4 章では,有限要素解析における状態量の更新手続きの重要性を強調した.弾塑
性材料のように,材料挙動が負荷経路に依存する材料の状態量を更新するには,対応
する速度形式の構成方程式に対して数値的に時間積分を施すためのアルゴリズムを定
式化しておく必要がある(弾塑性構成則により規定される初期値問題は,複雑なひず
み経路に対する解析的な解が求められないため)
.そして,状態量の更新手続きを定式
化する際に留意すべき重要な点は,有限要素解析全体の精度が,採用する数値積分ア
ルゴリズムの精度に強く依存することである.
本節では,6.3 節の一般的な弾塑性モデルに対する時間積分法について説明する.7.3
節では,ここで述べる方法を von Mises モデルに特殊化したうえで適用する.第 8 章
では Tresca や Mohr ‒ Coulomb,Drucker ‒ Prager モデルなどの,その他の基礎的な弾
塑性モデルに対してここで紹介する数値積分アルゴリズムを特殊化し,第 9 章では平
面応力問題における実装法を解説する.また,この章で述べる数値積分アルゴリズム
のさらなる適用例は,先進的な塑性モデルを扱っている第 10 章と,損傷力学モデルの
コンピュータプログラムへの実装方法を説明している第 12 章で紹介することにする.
7.2.1
弾塑性構成則の初期値問題
ボックス 6.2 に与えられている一般的な弾塑性モデルで記述される材料挙動を示す
物体 B 内の点 p を考える.そして,
(擬似的な)時刻 t0 における弾性ひずみ εe (t0 ) と
塑性ひずみ εp (t0 ),および硬化内部変数の集合 α(t0 ) はこの点 p で既知と仮定する.
さらに,時刻 t0 から次の瞬間 T における物体 B の運動が与えられれば,明らかにこ
の運動は時間 t0 ∼T におけるひずみ ε(t) の“履歴”を既定したことになる.以下,点
p における弾塑性構成則の初期値問題の基本形を提示する.
問題 7.1
弾塑性構成則の初期値問題
初期値 εe (t0 ) と α(t0 ),およびひずみの履歴
ε(t), t ∈ [t0 , T ] が既知のとき,次の“縮約された”一般的な弾塑性構成方程式を満
たすような弾性ひずみ εe (t),硬化内部変数 α(t),および塑性乗数 γ̇(t) を求めよ.
ε̇e (t) = ε̇(t) − γ̇(t)N (σ(t), A(t))
(7.6)
α̇(t) = γ̇(t)H(σ(t), A(t))
γ̇(t) ≥ 0,
Φ(σ(t), A(t)) ≤ 0,
γ̇(t)Φ(σ(t), A(t)) = 0
(7.7)
ここで,これらの式は任意の時刻 t について成り立っており,弾性構成則と硬化則
は,それぞれ次式で与えられる.
弾塑性構成方程式に対する一般化時間積分アルゴリズム
7.2
∂ψ σ(t) = ρ̄ e ,
∂ε t
注意 7.1
∂ψ A(t) = ρ̄
∂α t
217
(7.8)
式 (7.6) は,ボックス 6.2 のモデルから,塑性流れ則の式をひずみ速度を
加算分解した式に組み入れることにより求めたという意味で“縮約した”連立微分
方程式とよばれる.このとき,塑性ひずみは陽に現れず,弾性ひずみ・内部変数の
集合・塑性乗数のみが未知数となる.問題 7.1 の解 εe (t) が得られれば,塑性ひず
みの履歴は
εp (t) = ε(t) − εe (t)
(7.9)
で得られ,ボックス 6.2 に定義した弾塑性モデルに含まれるすべての変数の履歴が
定められることになる.
既に言及したとおり,前章で紹介したような降伏関数と流れ則が採用されれば,問
題 7.1 に対する厳密解は非常に単純なひずみ履歴に対してのみ得ることができる.た
だし,その場合でも,解析解を導出することは通常は面倒な作業である.また,現実
的な工学問題で生じうる複雑な変形経路については,一般に解析解を求めることは不
可能であるので,近似解を求めうる手法の利用が不可欠となる.以下では,弾塑性構
成則の初期値問題に対する数値解を得るための一般的な枠組みを述べることにする.
7.2.2
Euler 法による離散化:増分形式の構成則の初期値問題
ここではまず,式 (7.6) と式 (7.7) を Euler 法 (Euler scheme) を適用して離散化す
る.ただし,簡単のため,
(完全に陰的な)
“後退”Euler 差分法† を採用する.それに対
応して,ある一般的な(擬似的な)時間間隔 [tn , tn+1 ] における積分を行うために,式
(7.6) と式 (7.7) に現れるすべての速度形の状態量を,いま考えている時間内の対応す
る増分形式に置き換え,また関数 N ,H および Φ をその時間間隔の最後の時刻 tn+1
での値でそれぞれ置き換える.結果として得られる,問題 7.1 を離散化した問題は次
のようになる.
問題 7.2
増分形式の構成則の初期値問題 (擬似的な)時間間隔 [tn , tn+1 ] がはじま
る時点で,弾性ひずみ εen と内部変数集合 αn が既知で,その時間におけるひずみ
増分 Δε が既定されるとき,未知数 εen+1 ,αn+1 ,Δγ についての連立代数方程式
†
その他の Euler 差分に基づく解法も同様に適用可能であり,それらについては 7.2.7 項で取り上げている.
218
第 7 章 微小変形塑性問題の有限要素法
εen+1 = εen + Δε − ΔγN (σn+1 , An+1 )
(7.10)
αn+1 = αn + ΔγH(σn+1 , An+1 )
を,拘束条件
Δγ ≥ 0,
Φ(σn+1 , An+1 ) ≤ 0,
ΔγΦ(σn+1 , An+1 ) = 0
のもとで解きなさい.ここで,
∂ψ ∂ψ σn+1 = ρ̄ e , An+1 = ρ̄
∂ε n+1
∂α n+1
(7.11)
(7.12)
である.ただし,以上の式には次の表記方法を採用している.
Δ( · ) ≡ ( · )n+1 − ( · )n
(7.13)
ここで,下付添字はそれぞれ時刻 tn と tn+1 を表している.また,Δγ は,塑性乗
数の増分 (incremental plastic multiplier) である.解 εen+1 が得られれば,時間間
隔 [tn , tn+1 ] の終わりの時刻 tn+1 における構成モデルのすべての変数が既知とな
り,塑性ひずみは次式から算出することができる.
εpn+1 = εpn + Δε − Δεe
(7.14)
増分形式の初期値問題の解
離散的な相補性条件 (7.11) があるために,増分形式の弾塑性構成則の初期値問題
(7.10)∼(7.12) の解を求めるための手続きは,従来的な初期値問題 (すなわち,式 (7.7)
のような条件式を含まない初期値問題) に対する手続きとは異なる.それにもかかわ
らず,離散的な相補性条件は以下で導く 2 段階アルゴリズムに帰着するため,その解
法はむしろ単純になる.
まず,式 (7.11) の第 1 式は,次に挙げる二つの相容れないケースのみが考えうるこ
とに注意しよう.
① 塑性乗数の増分がないケース
Δγ = 0
(7.15)
このとき,当該時間間隔における塑性流れや内部変数の時間発展(変化)はない.
すなわち,この時間ステップは純粋な弾性である.そして,拘束条件式 (7.11) の
第 3 式は自動的に満たされ,εen+1 と αn+1 は
7.2
弾塑性構成方程式に対する一般化時間積分アルゴリズム
εen+1 = εen + Δε
219
(7.16)
αn+1 = αn
のように与えられるが,同時に拘束条件式
Φ(σn+1 , An+1 ) ≤ 0
(7.17)
は必ず満たされている.ここで,σn+1 と An+1 は,ポテンシャルを介しての関
係式 (7.12) で定義される εen+1 と An+1 の関数である.
② 塑性乗数の増分が正となるケース
Δγ > 0
(7.18)
この場合,εen+1 ,αn+1 ,Δγ は,
εen+1 = εen + Δε − ΔγN (σn+1 , An+1 )
(7.19)
αn+1 = αn + ΔγH(σn+1 , An+1 )
を満たし,式 (7.11) の第 2 式と式 (7.11) の第 3 式により,拘束条件式は次式と
なる.
Φ(σn+1 , An+1 ) = 0
(7.20)
以上をまとめると,問題 7.2 の解は,拘束条件式 (7.17) を満たす式 (7.16) から得られ
るか,もしくは拘束条件式 (7.18) を満たす式 (7.19),(7.20) の代数方程式の解として
得られるかのいずれかとなる.すなわち,二つの方程式群のうちのどちらか一つのみ
が問題 7.2 の解を与えることになる.したがって,あとは正しい解訳注 が選ばれるよう
な手続きを考えればよいことになる.その詳細が次の話題である.
7.2.3
弾性予測子/塑性修正子アルゴリズム
上記のような問題の性質から,三つの方程式群を逐次的に解いたうえで,最終的に
は正当な解のみを選択するといった,
(概念的には非常に単純な)2 段階アルゴリズム
が構築できる.具体的な方法は以下のとおりである.
① 試行弾性ステップ
まず,上の 2 ケースのうちはじめの方を想定して Δγ = 0 とする.すなわち,時
間間隔 [tn , tn+1 ] のステップは“弾性”であると仮定する.このとき,式 (7.16)
訳注 どちらの方程式群も代数方程式からなるので,どちらかを正しく選択できれば,自ずと正しい「解」が得
られることになる.
220
第 7 章 微小変形塑性問題の有限要素法
の解は必ずしも問題 7.2 の真の解とは限らないので,試行弾性解 (elastic trial
solution) とよばれ,次のように表記することにする.
trial
= εen + Δε
εen+1
αtrial
n+1 = αn
(7.21)
これに対応する応力と硬化応力は,試行弾性応力 (elastic trial stress),試行弾性
硬化応力 (elastic trial hardening force) とよばれ,次式で与えられる.
trial
trial
∂ψ ∂ψ trial
σn+1
= ρ̄ e , Atrial
=
ρ̄
(7.22)
n+1
∂ε n+1
∂α n+1
また,これらの変数を集合的に試行弾性状態 (elastic trial state) とよぶことにす
る.いま,この試行弾性状態が実際の解であれば,同時に式 (7.17) も満たしてい
るはずである.したがって,もし,
trial
, Atrial
Φtrial ≡ Φ(σn+1
n+1 ) ≤ 0
(7.23)
ならば,すなわち“試行弾性状態が弾性領域内かあるいは降伏曲面上”であれば,
この試行弾性状態が問題 7.2 の解となり,状態量を更新してアルゴリズムは終了
である.
( · )n+1 := ( · )trial
n+1
(7.24)
しかし,もしそうでなければ,試行弾性状態は塑性論的に許容されないことにな
り,問題 7.2 の解は以下の塑性修正ステップ (plastic corrector step) を経て求め
られる.
② 塑性修正ステップ(あるいはリターンマッピングアルゴリズム)訳注
残る唯一の選択肢は,式 (7.18) の拘束のもとで式 (7.19),(7.20) で与えられる代
数方程式を解くことである.上で定義した試行弾性状態を用いて,これらを次の
等価な代数方程式に書き改める.
⎧
trial
⎪
εen+1 = εen+1
− ΔγN (σn+1 , An+1 )
⎪
⎪
⎨
αn+1 = αtrial
n+1 + ΔγH(σn+1 , An+1 )
⎪
⎪
⎪
⎩
Φ(σn+1 , An+1 ) = 0
(7.25)
ここでは,いうまでもなく式 (7.12) の関係が利用される.したがって,このアル
ゴリズムにおける塑性修正ステップでは,式 (7.25) の解である εen+1 ,αn+1 ,お
訳注 原著では“Plastic Corrector Step (or Return Mapping Algorithm)”である.
7.2
弾塑性構成方程式に対する一般化時間積分アルゴリズム
221
よび Δγ を条件式,
Δγ > 0
(7.26)
のもとで求めることになる.
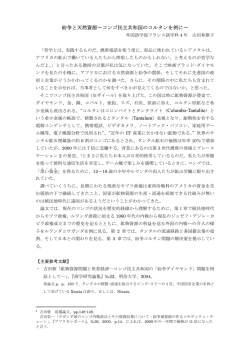
注意 7.2
上の項目 ② の手続きは,図 7.1 のような幾何学的解釈が可能である.試行
trial
弾性状態での降伏曲面を考えると,試行弾性応力 σn+1
は塑性論的許容領域の外側
に位置する(すなわち,弾性領域内でも降伏曲面上でもない).代数方程式 (7.25)
の解が得られたとき,塑性整合条件式 (plastic consistency equation) とよばれる式
(7.25) の第 3 式は,時間間隔 [tn , tn+1 ] の終了時点での応力 σn+1 が,更新された降
伏曲面上に位置することを保証する.すなわち,試行弾性応力は,更新状態におけ
る整合条件が満たされるように降伏曲面に“戻ってくる”
.また,完全塑性体では,
trial
σn+1
は固定された降伏曲面に戻ることになる.このような解釈から,項目 ② の手
続きはリターンマッピングアルゴリズム (return mapping algorithm) と称され,ま
た式 (7.25) はリターンマッピング方程式 (return mapping equation) とよばれてい
る.なお,Wilkins [1964] がその先駆的な研究のなかで提案したラディアルリター
ン法 (radial return method) は,この種のアルゴリズムの最初のものである.
図 7.1
一般的なリターンマッピング法
全体的な計算手順の要約
以上をまとめると,弾塑性構成則の初期値問題 [問題 7.1 を参照] の近似解法は,Euler
差分法を適用することにより,二つのステップからなる数値解析アルゴリズムに対応
する.そして,その二つのステップは,当該時間間隔においてあたかも弾性変形のみ
222
第 7 章 微小変形塑性問題の有限要素法
が生ずると仮定したうえで発展式を解き,試行弾性応力を求める弾性予測子 (elastic
predictor) と,塑性流れを考慮しながら塑性論的に許容される解を求めるリターンマッ
ピング (return mapping) で構成されている.ただし,リターンマッピングの演算は,
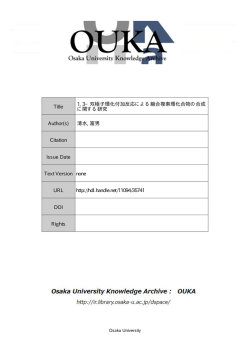
試行弾性状態が塑性論的許容条件を満たさない場合にのみ行うものである.図 7.2 に,
この数値積分のアルゴリズム全体の導出した際のプロセスをまとめる.
図 7.2
弾塑性初期値問題に対する弾性予測子/リターンマッピング積分アルゴリズムの導出プロセス
これまでに説明してきたアルゴリズムは,後退 Euler 差分法により弾塑性構成方程
式を離散化したものであり,
“後退”
,
“完全陰的”あるいは単に“陰的”弾性予測子/
リターンマッピング法と称される.このアルゴリズムを擬似コードを用いてまとめた
ものをボックス 7.1 に示しておく.なお,後退 Euler 差分法に代わる離散化を行えば,
上記と異なるリターンマッピングアルゴリズムが得られるが,弾性予測子については
上で示した方法と同様である.後退 Euler 差分以外の離散化に基づくアルゴリズムに
ついては,7.2.7 項で取り上げることにする.
ボックス 7.1
一般的な弾塑性構成方程式の時間積分のための完全陰的弾性予測子/リターンマッピ
ングアルゴリズム
① 弾性予測子:tn での Δε と状態変数が与えられ,“試行弾性状態”を評価する
e trial
εn+1
trial
αn+1
trial
e
= εn + Δε
= αn
σn+1 = ρ̄
∂ψ trial
,
e
∂ε n+1
trial
An+1 = ρ̄
② 塑性論的許容条件を確認する
trial
trial
もし Φ(σn+1 , An+1 ) ≤ 0
∂ψ trial
∂α n+1
13.5
aijkl =
応用:Ogden モデルの実装
1
[D : L : B]ijkl − σil δjk
2J
589
(13.107)
ここで与えた公式は,13.3.2 項で説明した平面応力問題であっても同様に成立する.
13.4.4
Blatz ‒ Ko モデル
式 (13.72) で与えた Blatz ‒ Ko モデルの構成方程式について考える.∂τ /∂B に関
する陽な表現形式を導くために,式 (13.72) を微分すると,
∂B −1
∂J
∂τ
= g (J)I ⊗
+ f μ0 IS − (1 − f )μ0
∂B
∂B
∂B
(13.108)
−1
= δij を微分す
となる.ここで,上式の右辺の最後の項の導関数は,恒等式 Bik Bkj
ることで†
−1
∂Bij
∂Bkl
1 −1 −1
−1 −1
= − (Bik
Blj + Bil
Bjk )
2
(13.109)
となり,これと式 (13.93) を式 (13.108) に代入すれば
∂τij
J
f μ0
−1
(δik δjl + δil δjk )
= g (J)δij Bkl
+
∂Bkl
2
2
(1 − f )μ0 −1 −1
−1 −1
(Bik Bjl + Bil
Bjk )
+
2
(13.110)
を得る.さらに,これを式 (13.89) に代入することで,a の成分をデカルト座標で陽に
表した公式が
aijkl = g (J)δij δkl +
+
f μ0
(δik Bjl + δjk Bil )
J
(1 − f )μ0
−1
−1
(δil Bjk
+ δjl Bik
) − σil δjk
J
(13.111)
のように得られる.なお,この公式のコンピュータプログラムへの実装は比較的簡単
なプログラミングの練習問題であろう.
13.5
応用:Ogden モデルの実装
本節では,実用面への応用を意図して,Ogden モデルのコンピュータプログラムへの
実装について詳細に解説する.HYPLAS のなかで該当するサブルーチンは,SUOGD (State
Update procedure for the OGDen material model) と CSTOGD (Consistent Spatial
Tangent modulus for the OGDen material model) である.これらは平面応力,平
†
−1
Bkj
は,テンソル B −1 の kj 成分を表す.
590
第 13 章
有限ひずみ超弾性体
面ひずみ,そして軸対称問題に分けてコード化されており,以下に示すように,それ
ぞれについて非圧縮性モデルと正則化されたモデルのいずれかが実装されている.
① 平面応力:非圧縮性モデルのみ [13.3.1 項を参照]
② 平面ひずみ:正則化されたモデルのみ
③ 軸対称:正則化されたモデルのみ
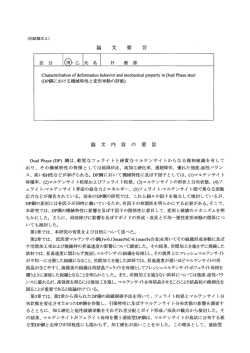
サブルーチン SUOGD
13.5.1
ボックス 13.1 には,Ogden モデルに対する応力の計算手順(および対応する計算
式)が擬似コードとして示されている.SUPGD は,変形勾配 F を入力データとして
“Cauchy”応力の成分を返すサブルーチンである.プログラム HYPLAS では,SUOGD で
求められた応力はサブルーチン IFSTD2 (または IFFB2) で要素内力ベクトルの計算に
用いられる.
ボックス 13.1
Ogden モデルに対する応力更新手順
HYPLAS procedure:
SUOGD
① 与えられた変形勾配 F から B := F F T を計算する
② (サブルーチン SPDEC2 を利用して) B のスペクトル分解を行い,主ストレッチを計算
する
B=
bi Mi ,
λi :=
bi
i
③ 主 Kirchhoff 応力を計算する
• 平面応力問題:“非圧縮性”モデルを使用
τβ :=
N
μp [λβ
αp
− (λ1 λ2 )
−αp
]
p=1
• 平面ひずみ/軸対称問題:“正則化された”モデルを使用
τi :=
N
μp J
−αp /3
p=1
λi
αp
−
1
α
α
α
(λ1 p + λ2 p + λ3 p ) + K ln J
3
④ Cauchy 応力を計算する
σ := J
−1
τ i Mi
i
以下に,SUOGD の FORTRAN ソースコードを示す.
13.5
1
SUBROUTINE SUOGD
2
1(
B
,IPROPS
,NTYPE
3
2
STRES
,THICK
)
4
IMPLICIT DOUBLE PRECISION (A-H,O-Z)
5
PARAMETER(IPOGDC=2)
6
LOGICAL DUMMY
7
8
,RPROPS
,RSTAVA
,
PARAMETER
1(
9
MCOMP=4
,MSTRE=4
,NDIM=2
)
DIMENSION
10
1
B(MCOMP)
,IPROPS(*)
11
2
RSTAVA(MSTRE)
,STRES(MSTRE)
12
,RPROPS(*)
,
,PSTRES(3)
,
DIMENSION
13
1
EIGPRJ(MCOMP,NDIM) ,EIGB(NDIM)
14
2
PSTRTC(3)
15
16
応用:Ogden モデルの実装
DATA
R1
1
,R3
/
1.0D0,3.0D0/
17
C***********************************************************************
18
C STRESS UPDATE PROCEDURE FOR OGDEN TYPE HYPERELASTIC MATERIAL MODEL.
19
C PLANE STRESS, PLANE STRAIN AND AXISYMMETRIC IMPLEMENTATIONS.
20
C***********************************************************************
21
C Retrieve Ogden material constants
22
C =================================
23
C Number of terms in Ogden’s strain-energy function
24
25
26
NOGTRM=IPROPS(3)
C Bulk modulus
BULK=RPROPS(IPOGDC+NOGTRM*2)
27
C Compute principal stretches
28
C ===========================
29
C Perform spectral decomposition of the left Cauchy-Green tensor B
30
31
32
33
34
CALL SPDEC2
1(
EIGPRJ
,EIGB
PSTRTC(1)=SQRT(EIGB(1))
PSTRTC(2)=SQRT(EIGB(2))
35
C...and out-of-plane stretches
36
IF(NTYPE.EQ.1)THEN
37
38
39
40
41
42
43
,DUMMY
C Compute in-plane principal stretches
PSTRTC(3)=R1/(PSTRTC(1)*PSTRTC(2))
ELSEIF(NTYPE.EQ.2)THEN
PSTRTC(3)=R1
ELSEIF(NTYPE.EQ.3)THEN
PSTRTC(3)=SQRT(B(4))
ENDIF
C Compute principal Kirchhoff stresses
,B
)
591
592
44
第 13 章
有限ひずみ超弾性体
C ====================================
45
CALL RVZERO(PSTRES,3)
46
IF(NTYPE.EQ.1) THEN
47
C Plane stress: Exact incompressibility assumed
48
C ---------------------------------------------
49
DO 10 I=1,NOGTRM
50
CMU=RPROPS(IPOGDC-1+I*2-1)
51
ALPHA=RPROPS(IPOGDC-1+I*2)
52
PSTRES(1)=PSTRES(1)+CMU*(PSTRTC(1)**ALPHA-
53
1
54
55
56
(PSTRTC(1)*PSTRTC(2))**(-ALPHA))
PSTRES(2)=PSTRES(2)+CMU*(PSTRTC(2)**ALPHA-
1
10
(PSTRTC(1)*PSTRTC(2))**(-ALPHA))
CONTINUE
57
DETF=R1
58
ELSE IF(NTYPE.EQ.2.OR.NTYPE.EQ.3)THEN
59
C Plane strain and axisymmetric: Regularised Ogden constitutive law
60
C -----------------------------------------------------------------
61
C Compute principal deviatoric Kirchhoff stresses
62
R1D3=R1/R3
63
DETF=PSTRTC(1)*PSTRTC(2)
64
IF(NTYPE.EQ.3)DETF=DETF*PSTRTC(3)
65
DO 20 I=1,NOGTRM
66
CMU=RPROPS(IPOGDC-1+I*2-1)
67
ALPHA=RPROPS(IPOGDC-1+I*2)
68
FACTOR=R1D3*(PSTRTC(1)**ALPHA+PSTRTC(2)**ALPHA+
69
1
PSTRTC(3)**ALPHA)
70
FACVOL=DETF**(-ALPHA*R1D3)
71
PSTRES(1)=PSTRES(1)+CMU*FACVOL*(PSTRTC(1)**ALPHA-FACTOR)
72
PSTRES(2)=PSTRES(2)+CMU*FACVOL*(PSTRTC(2)**ALPHA-FACTOR)
73
74
75
PSTRES(3)=PSTRES(3)+CMU*FACVOL*(PSTRTC(3)**ALPHA-FACTOR)
20
CONTINUE
C Add hydrostatic Kirchhoff pressure (incompressibility penalty term)
76
PRESS=BULK*LOG(DETF)
77
DO 30 I=1,3
78
79
80
PSTRES(I)=PSTRES(I)+PRESS
30
CONTINUE
ENDIF
81
C Assemble array of Cauchy stress tensor components
82
C ==================================================
83
CALL RVZERO(STRES,3)
84
R1DDET=R1/DETF
85
PSTRES(1)=PSTRES(1)*R1DDET
86
PSTRES(2)=PSTRES(2)*R1DDET
13.5
87
応用:Ogden モデルの実装
DO 50 ICOMP=1,3
88
DO 40 IDIR=1,2
89
STRES(ICOMP)=STRES(ICOMP)+PSTRES(IDIR)*EIGPRJ(ICOMP,IDIR)
90
40
91
CONTINUE
50 CONTINUE
92
IF(NTYPE.EQ.2.OR.NTYPE.EQ.3)STRES(4)=PSTRES(3)*R1DDET
93
C Update thickness (plane stress only) and store left Cauchy-Green
94
C tensor components in state variables vector RSTAVA
95
C ======================================================================
96
RSTAVA(1)=B(1)
97
RSTAVA(2)=B(2)
98
RSTAVA(3)=B(3)
99
IF(NTYPE.EQ.1)THEN
100
THICK=THICK*PSTRTC(3)
101
RSTAVA(4)=PSTRTC(3)*PSTRTC(3)
102
ELSEIF(NTYPE.EQ.2)THEN
103
RSTAVA(4)=R1
104
ELSEIF(NTYPE.EQ.3)THEN
105
RSTAVA(4)=B(4)
106
107
593
ENDIF
C
108
RETURN
109
END
サブルーチン SUOGD
→ B [B]:現時刻での左 Cauchy ‒ Green 変形テンソルの成分
→ IPROPS:材料種別を与えるための整数値を格納する配列.IPROPS(3) には Ogden
モデルのひずみエネルギー関数 NOGTRM における項数を格納する.これは SUOGD
で必要な整数値の材料特性であり,その値はプログラム HYPLAS のデータ入力プ
ロセスである RDOGD のなかで読み込まれる.
→ NTYPE:応力状態種別を与えるフラグ変数.この変数はそれぞれ,1:平面応力問
題,2:平面ひずみ問題,3:軸対称問題に対応する.
→ RPROPS:実数値の材料特性を格納する配列.この配列には,Ogden モデルの材
料定数 {μp , αp } (p = 1, . . . , NOGTRM) と対数体積ひずみに関する体積弾性係数 K
を格納する.この体積弾性係数は,平面ひずみ問題と軸対称問題にのみ採用され
る,圧縮性 Ogden モデルで使用する係数である.非圧縮性の平面応力問題では
使用されない.配列 RPROPS の値は,プログラム HYPLAS のデータ入力プロセス
である RDOGD のなかで読み込まれる.
594
第 13 章
有限ひずみ超弾性体
← RSTAVA [B]:応力成分以外の状態変数.HYPLAS に実装されている Ogden モデル
では,現時刻での左 Cauchy ‒ Green テンソル B の値を格納する.
← STRES [σ]:更新済みの Cauchy 応力テンソル成分
↔ THICK [t0 , t]:入力値は Gauss 点での初期の厚さ t0 であり,現時刻における更新
後の厚さ t を代入して戻す.これは平面応力問題においてのみ使用される.
サブルーチン SUOGD のローカル変数と配列
• EIGB [bi ]:固有値 B の配列
• EIGPRJ [Mi , i = 1, 2]:B を面内の固有空間に射影したテンソルの成分
• PSTRES [τi ]:主 Kirchhoff 応力の配列
• PSTRTC [λi ]:主ストレッチの配列
サブルーチン SUOGD において使用するユーザ定義関数
• RVZERO:関連する配列をゼロで初期化する関数
• SPDEC2:B のスペクトル分解を行う関数
13.5.2
サブルーチン CSTOGD
Ogden モデルの接線係数を計算する (応力の更新は前述のサブルーチン SUOGD で実
行する).主な計算ステップと a を計算に用いる式はボックス 13.2 に疑似コードとし
てまとめた.
ボックス 13.2 Oden モデルに対する空間表記の接線係数の計算
HYPLAS procedure:
CSTOGD
① 変形勾配 F を用いて B := F F T を計算する
② B のスペクトル分解を行い (SPDEC2 を利用),主ストレッチを計算する
B=
bi Mi ,
λi :=
bi
i
③ σ から主 Kirchhoff 応力を再構築する
τi := Jσ : Mi
④ 主 Kirchhoff 応力の微分値を計算する
• 平面応力:“非圧縮性”モデルを使用
N
∂τi
μ p αp
−α
α
:=
[λj p δij + (λ1 λ2 ) p ]
∂bj
2λj 2
p=1
• 平面ひずみ/軸対称:“正則化された”モデルを使用
13.5
応用:Ogden モデルの実装
1
α
α
α
(λ1 p + λ2 p + λ3 p )
3
N
K
∂τi
μp αp J −αp /3
α
α
α
:=
[f − λi p − λj p + 3λi p δij ] +
∂bj
6λj 2
2λj 2
p=1
f :=
⑤ ∂τ /∂B を計算する (DGISO2 を利用)
⑥ 空間表記の接線係数を計算する
aijkl =
2 ∂τij
Bml − σil δjk
J ∂Bkm
以下には,サブルーチン CSTOGD の FORTRAN ソースコードを示す.
1
SUBROUTINE CSTOGD
2
1(
AMATX
,B
3
2
STRES
)
,IPROPS
4
IMPLICIT DOUBLE PRECISION (A-H,O-Z)
5
LOGICAL OUTOFP ,REPEAT
6
7
,NTYPE
,RPROPS
,
PARAMETER
1(
8
MADIM=5
,MSTRE=4
,NDIM=2
)
PARAMETER(IPOGDC=2)
9
DIMENSION
10
1
AMATX(MADIM,MADIM) ,B(MSTRE)
11
2
RPROPS(*)
12
,IPROPS(*)
,
,STRES(MSTRE)
DIMENSION
13
1
DELTA(3,3)
14
2
EIGPRJ(MSTRE,NDIM) ,EIGB(NDIM)
15
3
PSTRES(3)
16
,DPSTRE(3,3)
,DTAUDB(MSTRE,MSTRE),
,PSTALP(3)
,
,PSTRTC(3)
DATA
17
1
DELTA(1,1)
,DELTA(1,2)
,DELTA(1,3)
/
18
2
1.0D0
,0.0D0
,0.0D0
/
19
3
DELTA(2,1)
,DELTA(2,2)
,DELTA(2,3)
/
20
4
0.0D0
,1.0D0
,0.0D0
/
21
5
DELTA(3,1)
,DELTA(3,2)
,DELTA(3,3)
/
22
6
0.0D0
,0.0D0
,1.0D0
/
23
DATA
24
1
R1
25
2
1.0D0,2.0D0,3.0D0,6.0D0/
,R2
,R3
,R6
/
26
C***********************************************************************
27
C COMPUTATION OF THE CONSISTENT SPATIAL TANGENT MODULUS ’a’ FOR
28
C OGDEN TYPE HYPERELASTIC MATERIAL MODEL.
29
C PLANE STRESS, PLANE STRAIN AND AXISYMMETRIC IMPLEMENTATIONS.
30
C***********************************************************************
595
訳 者 一 覧(五十音順)
秋山 雅義(あきやま・まさよし)[前書き,第 1,6 章]
京都工芸繊維大学大学院工芸科学研究科機械システム工学部門教授
浅井 光輝(あさい・みつてる)[第 12,13,16 章]
九州大学大学院工学研究院社会基盤部門准教授
石井 建樹(いしい・たてき)[第 8,12 章]
木更津工業高等専門学校環境都市工学科准教授
生出 佳(おいで・かい)[第 8 章,付録 A∼D]
株式会社メカニカルデザイン
岡澤 重信(おかざわ・しげのぶ)[第 3∼5 章]
広島大学大学院工学研究科輸送・環境システム専攻准教授
久保木 孝(くぼき・たかし)[第 6,11 章,付録 A,B]
電気通信大学大学院情報理工学研究科知能機械工学専攻准教授
車谷 麻緒(くるまたに・まお)[第 3,7 章,付録 C,D]
茨城大学工学部都市システム工学科講師
斉木 功(さいき・いさお)[第 2,4,13 章]
東北大学大学院工学研究科土木工学専攻准教授
高木 知弘(たかき・ともひろ)[第 2,6,9 章]
京都工芸繊維大学大学院工芸科学研究科機械システム工学部門准教授
堤 成一郎(つつみ・せいいちろう)[第 9∼11 章]
大阪大学接合科学研究所機能評価研究部門信頼性設計学分野准教授
松井 和己(まつい・かずみ)[第 5,7,15 章]
横浜国立大学大学院環境情報研究院准教授
山川 優樹(やまかわ・ゆうき)[第 10,14 章]
東北大学大学院工学研究科土木工学専攻准教授
渡邊 育夢(わたなべ・いくむ)[第 14∼16 章]
独立行政法人 物質・材料研究機構研究員
寺田
監 訳 者 略 歴
賢二郎(てらだ・けんじろう)
1990
1991
1996
1996
1997
1999
年
年
年
年
年
年
編集担当
編集責任
組
版
印
刷
製
本
名古屋大学工学部土木工学科卒業
清水建設株式会社退社
ミシガン大学工学部機械工学・応用力学科博士課程修了
東京大学助手
東北大学講師
東北大学助教授(2007 年から准教授に名称変更)
現在に至る
Ph.D
二宮 惇(森北出版)
石田昇司(森北出版)
プレイン
エーヴィスシステムズ
ブックアート
非線形有限要素法 ―弾塑性解析の理論と実践―
2012 年 6 月 29 日
監 訳 者
発 行 者
発 行 所
第 1 版第 1 刷発行
版権取得
2008
【本書の無断転載を禁ず】
寺田賢二郎
森北博巳
森北出版株式会社
東京都千代田区富士見 1-4-11(〒102-0071)
電話 03-3265-8341/FAX 03-3264-8709
http://www.morikita.co.jp/
日本書籍出版協会・自然科学書協会・工学書協会 会員
<
(社)出版者著作権管理機構 委託出版物>
落丁・乱丁本はお取替えいたします.
Printed in Japan/ISBN978-4-627-92021-7
© Copyright 2026 Paperzz