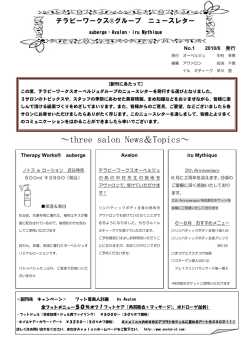
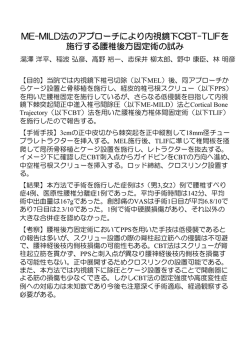
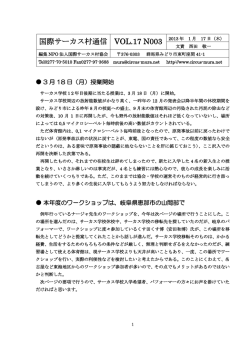
)HDWXUH$UWLFOH 0DVDR+RULED$ZDUGV Technical Reports 堀場雅夫賞 特別賞受賞者論文 Ubiquitous Geo-Localization Without Infrastructure インフラを使用しないユビキタス位置特定手法 The primary method for geolocalization is based on GPS which has issues of Alper YILMAZ localization accuracy and unavailability. We introduced a new geolocalization アルパー イルマズ approach to GPS-denied indoor and outdoor environments. His approach has two principal components: public domain transport network data for outdoor and indoor available in GIS (Geographic Information System) databases; and trajectory data acquired from a mobile platform. This trajectory is estimated using inertial sensors or visual odometry. We abstract the transport map information as a graph data structure, where various types of roads are modeled as graph edges and typically intersections are modeled as graph nodes. A search for the trajectory in real time in the graph yields the geolocation of the mobile platform. The approach uses a simple visual sensor and it has a low memory and computational footprint. Our approach has the potential to completely augment, or even supplement, GPS based navigation since it functions ubiquitously in all environments. 主要な位置特定手法としてGPSがあげられるが,位置精度や適用可能範囲に 課題がある。そこで,GPSが適用できない屋内・屋外環境における新しい位置 特定手法を考案した。この手法には二つの基本要素がある。ひとつは,地理情 報システム (GIS) に含まれる屋内・屋外の公的な道路網情報データ,もうひと つは,車両からの情報に基づく走行軌跡データで,慣性計測センサやビジュア ルオドメトリを使って推定される。筆者は,道路網情報をモデル化されたグラフ データ構造で表現した。この構造では,様々なタイプの道路はグラフの線 (エッ ジ) ,交差点は交点 (ノード) として表される。このグラフモデル中でリアルタイム に軌跡を探索し,車両の位置を特定する。この手法は,単純な視覚センサを使 用し,小容量メモリの小型コンピュータ上で動作する。あらゆる環境で場所を選 ばずに適用できることから,本手法は,GPSを使ったナビゲーションを補強し, さらにデータを補完する技術になると考える。 Introduction $XWRQRPRXVQDYLJDWLRQLVDQHPHUJLQJWHFKQRORJ\ZLWKD KXJH SRWHQWLDO VHOIGULYLQJ FDUV DUH DOPRVW URXQG WKH FRUQHU7KLVWHFKQRORJ\UHTXLUHVDFFXUDWHJHRORFDOL]DWLRQ LQ UHDOWLPH WR HIIHFWLYHO\ QDYLJDWH XUEDQ HQYLURQPHQWV &XUUHQWO\QDYLJDWLRQWHFKQRORJLHVDUHWLPHRIÀLJKWUHOL DQW VXFK DV *OREDO 3RVLWLRQLQJ 6\VWHP *36[1] 8OWUD :LGH %DQG 8:%[2] %OXHWRRWK[3] DQG DFWLYH UDGLRIUH TXHQF\ LGHQWL¿FDWLRQ $5),'[4] ZKLFK KDYH PXOWLSOH LVVXHV7KHDFFXUDF\RIVWDQGDUGWLPHRIÀLJKWGHYLFHVLV XQDFFHSWDEO\ SRRU IRU WKH SXUSRVHV RI DXWRQRPRXV QDYL JDWLRQDQGDFFXUDWHVHQVRUVDUHYHU\H[SHQVLYHWRGHSOR\ DQG PDLQWDLQ (VSHFLDOO\ FRPPRQO\ DGRSWHG *36 EDVHG VROXWLRQ LV XQUHOLDEOH LQ VHYHUDO HQYLURQPHQWV ZKHUH WUDQVPLVVLRQEHWZHHQWKHGHYLFHDQGVDWHOOLWHVLVLPSHGHG E\VXUURXQGLQJVWUXFWXUHVOLNHWDOOEXLOGLQJVLQDQXUEDQ HQYLURQPHQW WKH VR FDOOHG µXUEDQ FDQ\RQV¶ ,Q DGGLWLRQ *36LVXQDYDLODEOHLQGRRUVXQGHUJURXQGLQWXQQHOVHWF DQGFDQDOVREHGHJUDGHGRUGHQLHGLQFHUWDLQJHRJUDSKLF UHJLRQV,QRUGHUWREHYLDEOHIRUDKXJHFRQVXPHUPDUNHW WKHUHLVDQHHGIRUJHRORFDOL]DWLRQVROXWLRQWKDWRSHUDWHV ZLWKORZFRVWVHQVRUVDQGSXEOLFGRPDLQGDWD :H SRVH WKH SUREOHP RI DFFXUDWH JHRORFDOL]DWLRQ DV D FRPELQDWLRQRIDFFXUDWHUHODWLYHORFDOL]DWLRQZLWKLQDYHU\ Special issue October 2016 37 ) HDWXUH$UWLFOH 堀場雅夫賞 特別賞受賞者論文 Ubiquitous Geo-Localization Without Infrastructure Figure 1 Trajectory Geo-Localization: VO is used to compute a trajectory in real-time which is abstracted as a sub-graph and is progressively localized by sub-graph matching in a graph abstraction of transport network map of the region of interest. ODUJH VSDWLDO VHDUFK VSDFH ZLWKRXW UHTXLULQJ DQ\ LQIUD VWUXFWXUHVXFKDVGHSOR\PHQWRIDQWHQQDV7KHUHODWLYHOR FDOL]DWLRQFDQEHFRPSXWHGXVLQJ9LVXDO2GRPHWU\92 RU ,08 DQG WKH ODUJH VSDWLDO VHDUFK VSDFH LV DFTXLUHG IURP*,6GDWDEDVHV[5]7KHNH\LQVLJKWLVWKDWWKHPRWLRQ RIWKHW\SLFDOPRELOHSODWIRUPLVFRUUHODWHGWRWKHDVVRFL DWHGWRSRORJ\RIWKHVSDWLDOVHDUFKVSDFH)RUH[DPSOHD FDUPRYHVRQURDGVDQGVRWKHWUDMHFWRU\RIWKHFDUIRUD ¿QLWH GLVWDQFH RI WUDYHO LV FRUUHODWHG WR D VXEVHW RI WKH WUDQVSRUWQHWZRUNOD\HURI*,6LQWKHVSDWLDOVHDUFKVSDFH IRUWKDWFDU7KHXVHRIRQHRUPRUHOD\HUVRI*,6EDVHG RQ WKH W\SH RI PRELOH SODWIRUP DQG VHQVRUV IDFLOLWDWHV ÀH[LELOLW\LQRXUDSSURDFKDQGWKHDELOLW\WRVFDOHWKHVROX WLRQ UHTXLUHVDQLQLWLDOK\SRWKHVLVRIUHJLRQZKHUHWKHPRELOH SODWIRUP FDQ EH ORFDWHG ZKLFK FDQ EH LQGRRUV RU RXW GRRUV)RUW\SLFDOXVHFDVHVWKHUHJLRQRILQWHUHVWZRXOG EHDFRXQWU\RUFLW\VL]HGDUHD7KHDSSURDFKLVLOOXVWUDWHG LQWKHEORFNGLDJUDPLQFigure 17KH¿UVWVWHSLVWRDF TXLUH PDS GDWD IURP D SXEOLF GRPDLQ VRXUFH VXFK DV 2SHQ6WUHHW0DS2607KLVGDWDLVW\SLFDOO\JLYHQLQDQ ;0/IRUPDWDQGLVVWUXFWXUHGXVLQJWKUHHEDVLFHQWLWLHV QRGHVZD\VDQGUHODWLRQV7KHQRGHVUHSUHVHQWSRLQWHOH PHQWV LQ WKH PDS DQG DUH GH¿QHG E\ WKHLU *36 FRRUGL QDWHV 7KH LQWHUHVWLQJ PDS VWUXFWXUHV IRU XV DUH VWUHHWV ZKLFK DUH PRGHOOHG DV ZD\V DQG FDQ EH H[WUDFWHG IURP WKH ;0/ GDWD LQ WR IRUP D VWUHHW JUDSK RI WKH UHJLRQ RI LQWHUHVW Encoding Motion 6LPLODUWRRXWGRRULQGRRUGDWDLVSURYLGHGE\PHDQVRID EXLOGLQJ LQIRUPDWLRQ PRGHO %,0 DQG FRQWDLQV VLPLODU OD\HUVRIGDWDZKLFKFDQEHXVHGWRHVWLPDWHWKHORFDWLRQ RIWKHSODWIRUPLQGRRUV :HSRVHWKHSUREOHPRIDFFXUDWHPRELOHSODWIRUPJHROR FDOL]DWLRQDVDFRPELQDWLRQRIDSSUR[LPDWHJHRORFDOL]D WLRQ DQG DFFXUDWH UHODWLYH ORFDOL]DWLRQ 7KH DSSURDFK (a) (b) Figure 2 (a) Encoding trajectory of mobile platform and edges on graph of transport network. The motion from a point at a sampling interval to next point is measured in angle which is quantized into bins. (b) Feature descriptor for estimated 3D trajectory of mobile platform and edges of graph representing roads. 38 Special issue October 2016 Technical Reports 7KHVHFRQGVWHSLVWRFRPSXWHIHDWXUHGHVFULSWRUVIRUWKH ' WUDMHFWRU\ RI WKH SODWIRUP DQG WKH WUDQVSRUW QHWZRUN JUDSK:HFKRVHDFRQWRXUWDQJHQWVKRZQLQFigure 2aDV WKHXQLIRUPVDPSOHGLVWDQFH,QRUGHUWRDLGVFDODELOLW\RI WKHVROXWLRQZHRSWHGIRUDGHVFULSWRUWKDWLVERWKIDVWDQG JRRGIRUVHDUFKWUDMHFWRU\LQWKHJUDSK$WUDMHFWRU\LVDV VXPHGWREHFRQVLVWHGRISRLQWVDWURXJKO\XQLIRUPVDP SOLQJGLVWDQFH7KHTXDQWL]DWLRQDVVRFLDWHGZLWKVDPSOLQJ GLVWDQFHLVUHOHYDQWLQWHUPVRIVHQVLWLYLW\WRWKHPRWLRQRI WKH PRELOH SODWIRUP 7KH FKRLFH RI TXDQWL]DWLRQ OHYHO LV EDVHGRQRSWLPL]LQJVHQVLWLYLW\WRPRELOHSODWIRUPPRWLRQ ZKLOHPLQLPL]LQJHIIHFWRIQRLVHFigure 2bVKRZVDWUD MHFWRU\HQFRGHGLQWKLVPDQQHU Trajectory Search in Graph :LWK WKH DLP RI IDFLOLWDWLQJ D JHQHUDOL]HG VROXWLRQ WKDW GRHVQRWUHTXLUHNQRZOHGJHRIJHRJUDSKLFFRRUGLQDWHVRU JOREDO GLUHFWLRQ LQIRUPDWLRQ RI WKH PRELOH SODWIRUP ZH DVVXPHWKDWWKHWUDMHFWRU\HVWLPDWHGE\92LVLQLWVVLP SOLVWLF IRUP D VHTXHQFH RI SRLQWV ZLWK UHODWLYH GLVWDQFH PHDVXUH7KLVPHDQVWKHPRVWUHOLDEOHPRGHRIHQFRGLQJ WKHWUDMHFWRU\LVFKDQJHLQDQJOHRIPRWLRQRIWKHPRELOH SODWIRUPZKLFKLVHTXLYDOHQWWRFRQWRXUDQJOHVRIDVSOLQH DSSUR[LPDWLRQ RI WKH DFTXLUHG VHTXHQFH RI SRLQWV $ JUDSK DEVWUDFWLRQ RI WKLV WUDMHFWRU\ LV FUHDWHG XVLQJ WKH FRQWUROSRLQWVDVQRGHVRIWKHJUDSKDQGVHWRISRLQWVEH WZHHQFRQWUROSRLQWVFRPSULVHDQHGJHRIWKHJUDSK6LQFH WKHPRELOHSODWIRUPWUDYHOVRQWKHURDGQHWZRUNWKHWUDMHF WRU\JUDSKFDQEHDVVXPHGWREHDVXEJUDSKRIWKHPDS JUDSK2XUDSSURDFKWRVHDUFKLQJIRUDPDWFKLQWKLVODUJH JUDSK LV WR LQWURGXFH SDWK JUDSK 6HDUFKLQJ IRU D WUDMHF WRU\ LV HTXLYDOHQW WR VHDUFK IRU D VXEJUDSK RI WKH ODUJHU JUDSK6RZHFRPSXWHDVLPLODULW\VFRUHEHWZHHQWKHWUD MHFWRU\ JUDSK DQG SDWK JUDSK IRU DOO SDWK JUDSKV LQ WKH PDSJUDSK7KHEHVWPDWFKLQJSDWKJUDSKLVWKHQVHOHFWHG DVWKHVROXWLRQ Experiments :HIRXQGWKDWDEVWUDFWLRQRIWUDMHFWRU\DQGPDSWRJUDSK VWUXFWXUH VKRXOG EH EDVHG RQ WKH VFDOH DQG IUHTXHQF\ RI RFFXUUHQFH RI VLJQL¿FDQW IHDWXUHV 7R LPSURYH HI¿FLHQF\ RIWKHLPSOHPHQWDWLRQZHEHJLQZLWKDQDQDO\VLVRIWKHWR SRORJ\ RI WKH PDS GDWD 7KHUH UHVXOWV ZHUH XVHG WR WXQH WKH SDUDPHWHUV RI RXU JHRORFDOL]DWLRQ SLSHOLQH ZKLFK LV HYDOXDWHG RQ VHYHUDO GDWDVHWV IRU GLIIHUHQW SDUWV RI WKH ZRUOG :H DFTXLUHG PDSV IRU UHJLRQV RI LQWHUHVW IURP 2SHQ6WUHHW0DS WR HYDOXDWH WKH SHUIRUPDQFH RI RXU DSSURDFKIRUGLIIHUHQWW\SHVRIWUDQVSRUWQHWZRUNWRSROR JLHVLQFOXGLQJXUEDQVHPLXUEDQDQGFRXQWU\URDGVDQG VFDOHRIWKHVHDUFKUHJLRQ:HVHOHFWHGPDSVIRUµ)UDQNOLQ FRXQW\2KLR¶ZKLFKSURYLGHVDW\SLFDO86FRXQW\VL]HG PDS µ:DVKLQJWRQ '&¶ ZKLFK LV D KLJKO\ XUEDQ UHJLRQ ZLWK D ODWWLFH JULG VWUXFWXUHG URDG QHWZRUN DQG µ0RQWSHOOLHU)UDQFH¶ZKLFKLVDVHPLXUEDQDQGFRXQWU\ VSDJKHWWL VKDSHG URDG QHWZRUN RI D VWDWH VL]HG UHJLRQ 6RPHRIWKHUHVXOWVRIRXUH[SHULPHQWVIRUHDFKRIWKHVH UHJLRQVLVLOOXVWUDWHGLQFigure 3,QLWLDOO\WKHHVWLPDWHG WUDMHFWRU\LVVKRUWDVWKHPRELOHSODWIRUPEHJLQVPRYLQJ :HFRPSXWHDVLPLODULW\VFRUHDQGREVHUYHWKDWWKHUHDUH VHYHUDOPDWFKLQJSDWKVVKRZQLQWKH¿UVWFROXPQRIWKH )LJXUHIRUHDFKUHJLRQ$VWKHHVWLPDWHGWUDMHFWRU\JURZV WKHQXPEHURIFDQGLGDWHSDWKVUHGXFHEDVHGRQRXUHPSLU LFDOO\ GHWHUPLQHG WKUHVKROG VKRZQ LQ WKH FHQWHU FROXPQ LQWKH¿JXUH6XEVHTXHQWO\DVLQJOHSDWKZLWKWKHKLJKHVW VLPLODULW\VFRUHUHPDLQVZKLFKLVRXUPDWFKHGSDWKLQWKH PDSJUDSK7KHULJKWFROXPQIRUHDFKUHJLRQLQWKH¿JXUH VKRZVWKHPDWFKHGSDWKLQWKHJUDSKIRUWKHFRUUHVSRQG LQJ PRELOH SODWIRUP WUDMHFWRU\ ,Q RXU H[SHULPHQWV ZH IRXQGWKDWTXLFNVHDUFKGHSHQGVRQWKHXQLTXHQHVVRIWKH WUDMHFWRU\DQGWKHQDWXUHRIWKHPDSJUDSK Conclusions :HFRQVLGHUWKHSUREOHPRIJHRORFDOL]DWLRQLQUHDOWLPH 1RWH WKDW WKH HVWLPDWHG WUDMHFWRU\ FRQWLQXRXVO\ JURZV ZLWK WLPH DQG FRQVHTXHQWO\ WKH WUDMHFWRU\ JUDSK DOVR JURZV ZLWK WLPH &RQVHTXHQWO\ ZH IRUPXODWH RXU WUDMHF WRU\ VHDUFK VROXWLRQ DFFRUGLQJ WR D VXEVWULQJ PDWFKLQJ DOJRULWKP[6] 7KH WUDMHFWRU\ LV D VHTXHQFH RI TXDQWL]HG HGJHRULHQWDWLRQVZHGHVFULEHGHDUOLHU(DFKJUDSKSDWKLV DOVR VLPLODUO\ HQFRGHG DV D VHTXHQFH RI TXDQWL]HG HGJH RULHQWDWLRQV 7KH NH\ EHQH¿W RI XVLQJ VWULQJ PDWFKLQJ LV WKDWSDUWLDOPDWFKHVDOVRSURGXFHDUHDVRQDEO\JRRGVLPL ODULW\ VFRUH 7KLV IRUPXODWLRQ PDNHV UREXVW WR QRLVH PLVVLQJ GDWD HUURQHRXV YHKLFOH PRWLRQ OLNH VZHUYLQJ PDS UHJLVWUDWLRQ ÀDZV HWF 7KH PRWLYDWLRQ IRU WKLV DS SURDFKLVGHULYHGIURPWKHSRSXODU%DJRI:RUGVPHWKRG LQ FRPSXWHU YLVLRQ WKDW KDV DOVR EHHQ XVHG IRU 6LPXOWDQHRXV/RFDOL]DWLRQDQG0DSSLQJ $QRYHODSSURDFKIRUJHRORFDOL]LQJSRVLWLRQRIDPRELOH SODWIRUP LV SUHVHQWHG :H KDYH SURSRVHG D PRGL¿HG DS SURDFK WR FODVVLFDO YLVXDO RGRPHWU\ SLSHOLQH ZLWK LQGRRU DQG RXWGRRU PDS GDWD LQ D XQL¿HG IUDPHZRUN :H KDYH GHVFULEHG WKH DOJRULWKPLF DQG LPSOHPHQWDWLRQ GHWDLOV RI RXUPHWKRGDQGGHPRQVWUDWHGLWRQVHYHUDOGLIIHUHQWW\SHV RI PDSV IURP GLIIHUHQW UHJLRQV RI WKH ZRUOG :H KDYH GHPRQVWUDWHG H[FHOOHQW UHVXOWV RQ RXU SURSRVHG YLVXDO RGRPHWU\ SLSHOLQH RQ D EHQFKPDUN GDWDVHW 2XU UHVXOWV VKRZWKDWWKHSURSRVHGV\VWHPLVDEOHWRSURYLGHIXOO\DX WRPDWLF JOREDO ORFDOL]DWLRQ DW D ORZ LQIUDVWUXFWXUDO FRVW %XLOGLQJRQWKLVZRUNZHSODQWRIXUWKHULQYHVWLJDWHWKH XVHRIPDSVHVSHFLDOO\GLIIHUHQWOD\HUVRID*,6GDWDEDVH VXFKDVEXLOGLQJK\GURORJ\UHOLHIPDSVHWF:HDOVRSODQ WR LQWHJUDWH RXWGRRU DQG LQGRRU *36GHQLHG QDYLJDWLRQ Special issue October 2016 39 ) HDWXUH$UWLFOH 堀場雅夫賞 特別賞受賞者論文 Ubiquitous Geo-Localization Without Infrastructure (a) (b) (c) Figure 3 Geo-localization of mobile platform trajectory. (from top to bottom) For the geographic regions of ‘Franklin County, Ohio’, ‘Washington DC, US’, and ‘Montpellier, France’. The estimated trajectory of the mobile platform is shown on the top left; the histogram on the top right shows the match score of each candidate path; and the map shows the current candidate paths. In the first column, the initial trajectory is small and several candidate paths are spawned. The similarity match score is shown in the histogram graph. As trajectory grows several candidates are pruned. Finally, the best matching path remains, shown in the right column, which is used for inferring geo-location of the mobile platform. 40 Special issue October 2016 Technical Reports IRUVHDPOHVVXQLQWHUUXSWHGJHRQDYLJDWLRQLQDOOORFDWLRQV DQGHQYLURQPHQWFRQGLWLRQV Acknowledgements , ZRXOG OLNH WR H[SUHVV P\ JUDWLWXGH IRU WKH PHPEHUV RI P\ UHVHDUFK /DE SDUWLFXODUO\ $VKLVK *XSWD 6LDYDVK +RVVHLQ\$ODPGDU\DQG<XMLD=KDQJDW268ZKRKHOSHG GHYHORSPHQW DQG UHVHDUFK RI WKLV V\VWHP 7KLV V\VWHP FRXOGQRWKDYHEHHQGHYHORSHGZLWKRXWWKHVXSSRUWRI86 'HSDUWPHQWRI'HIHQVH'HIHQVH,QWHOOLJHQFH$JHQF\DQG 1DWLRQDO$HURQDXWLFVDQG6SDFH$JHQF\ References [ 1 ] 1DWLRQDO 5HVHDUFK &RXQFLO 86 &RPPLWWHH 5HSRUW RQ WKH )XWXUH RI WKH *OREDO 3RVLWLRQLQJ 6\VWHP 1DWLRQDO $FDGHP\ RI 3XEOLF $GPLQLVWUDWLRQ 7KH JOREDO SRVLWLRQLQJ V\VWHP D VKDUHG QD WLRQDO DVVHW UHFRPPHQGDWLRQV IRU WHFKQLFDO LPSURYHPHQWV DQG HQ KDQFHPHQWV1DWLRQDO$FDGHPLHV3UHVVS,6%1 [ 2 ] = KRX</DZ&/*XDQ</&KLQ),QGRRUHOOLSWLFDOORFDOL]D WLRQ EDVHG RQ DV\QFKURQRXV 8:% UDQJH PHDVXUHPHQW ,((( 7UDQVDFWLRQVRQ,QVWUXPHQWDWLRQDQG0HDVXUHPHQW [ 3 ] -LP(GZDUGV$SSOH,V/DXQFKLQJ$9DVW3URMHFW7R0DS7KH,QVLGH 2I(YHU\/DUJH%XLOGLQJ,W&DQ%XVLQHVV,QVLGHU-XQH [ 4 ] 5H]D $: *HRN 7. ,QYHVWLJDWLRQ RI LQGRRU ORFDWLRQ VHQVLQJ YLD 5),' UHDGHU QHWZRUN XWLOL]LQJ JULG FRYHULQJ DOJRULWKP :LUHOHVV 3HUVRQDO&RPPXQLFDWLRQV [ 5 ] 2 SHQ6WUHHW0DS)RXQGDWLRQ:LNLFRQWULEXWRUV0DLQ3DJH>,QWHUQHW@ 2SHQ6WUHHW0DS )RXQGDWLRQ :LNL $XJ 87& >FLWHG $XJ @ $YDLODEOH IURP KWWSZLNLRVPIRXQGDWLRQRUJZ LQGH[SKS"WLWOH 0DLQB3DJHROGLG [ 6 ] 3DXO5DQG1HZPDQ3)$%0$3'7RSRORJLFDOPDSSLQJ ZLWK VSDWLDO DQG YLVXDO DSSHDUDQFH ,Q ,((( ,QWHUQDWLRQDO &RQIHUHQFHRQ5RERWLFVDQG$XWRPDWLRQSS± Alper YILMAZ 'HSDUWPHQWRI&LYLO (QYLURQPHQWDODQG*HRGHWLF(QJLQHHULQJ 7KH2KLR6WDWH8QLYHUVLW\ $VVRFLDWH3URIHVVRU 3K' Special issue October 2016 41
© Copyright 2026 Paperzz