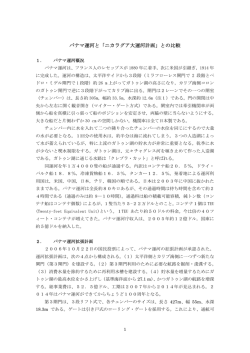
ISSN1346-7840 港湾空港技術研究所 資料 TECHNICAL NOTE OF THE PORT AND AIRPORT RESEARCH INSTITUTE No. 1115 March 2006 防衝工の信頼性設計法における部分係数の提案 独立行政法人 米山 治男 高橋 宏直 後藤 文子 港湾空港技術研究所 Independent Administrative Institution, Port and Airport Research Institute, Japan 目 要 旨 次 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 3 1.はじめに ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 4 2.信頼性設計法 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 4 2.1 信頼性設計法および性能照査 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 4 2.2 破壊確率および信頼性指標 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 5 2.3 信頼性指標の算定法 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 7 2.4 部分係数の算定式 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 10 3.防衝工設計法 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 10 3.1 防衝工設計法の動向 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 10 3.2 防衝工の性能照査の考え方 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 12 4.部分係数 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥13 4.1 検討の手順 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥13 4.2 船種の選定 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥13 4.3 パラメータの確率分布の設定 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥15 4.4 防衝工の規格値の設定 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥20 4.5 目標信頼性指標の算定 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥22 4.6 部分係数の算定 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥23 5.結論 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25 6.おわりに ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥26 謝辞 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥26 参考文献 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥26 記号表 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥27 付録A 船種別の満載時の排水量(排水トン数)の回帰式および標準偏差 ‥‥‥‥‥‥‥‥‥29 付録B 船種別の接岸速度の回帰式および標準偏差 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥31 付録C 船種別の仮想質量係数の回帰式および標準偏差 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥33 付録D 船種別の偏心係数の回帰式および標準偏差 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥35 付録E 船種別の防衝工の規格値の算定結果 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥37 付録F 船種別の部分係数の算定結果 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥40 付録G 船種別の部分係数の標準値 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥43 -1- Proposition of Partial Factors on Reliability-Based Design Method for Fenders Haruo YONEYAMA* Hironao TAKAHASHI** Ayako GOTO*** Synopsis In this study, we investigated the partial factors of the performance checking equation of fenders for each kind of ships in order to introduce the Level-1 reliability-based design method. To achieve the purpose, we considered the probability distributions of some parameters for the fender design: the mass of a ship (the displacement tonnage of a ship when fully loaded), the berthing velocity of a ship, the virtual mass factor and the eccentricity factor. And then we calculated the partial factors of the performance checking equation of fenders by applying the reliability analysis based on First-Order Reliability Method (FORM). As a result of this study, we proposed that the standard values of the partial factors are 1.01 to 1.41 for the mass of a ship, 1.90 to 2.07 for the berthing velocity of a ship, 1.00 to 1.03 for the virtual mass factor and 1.00 to 1.02 for the eccentricity factor. Key Words: fender, reliability-based design method, partial factor, performance checking equation, failure probability, reliability index * Head, Offshore Structures Division, Geotechnical and Structural Engineering Department ** Head, Port Planning Division, Port and Harbor Department, National Institute for Land and Infrastructure Management *** Researcher, Port Planning Division, Port and Harbor Department, National Institute for Land and Infrastructure Management 3-1-1 Nagase, Yokosuka, 239-0826 Japan Phone:+81-46-844-5060 Fax:+81-46-844-0255 e-mail:[email protected] -2- 防衝工の信頼性設計法における部分係数の提案 米山 高橋 後藤 要 治男* 宏直** 文子*** 旨 本研究では,現行の防衝工の設計法にレベル1信頼性設計法を導入するために,船種に対応した防 衝工の性能照査式の部分係数について検討し,それらの標準値を提案することを目的とした.このと き,防衝工の設計に関する各パラメータ(船舶の質量(満載時の排水量),船舶の接岸速度,仮想質 量係数,偏心係数)の確率分布を考慮して,1次信頼性理論(FORM: First-Order Reliability Method) による信頼性解析を適用して防衝工の性能照査式の部分係数を算定した.部分係数の標準値は,船舶 の質量(満載時の排水量)に対しては 1.01~1.41,船舶の接岸速度に対しては 1.90~2.07,仮想質量 係数に対しては 1.00~1.03,また偏心係数に対しては 1.00~1.02 となった. キーワード:防衝工,信頼性設計法,部分係数,性能照査式,破壊確率,信頼性指標 * 地盤・構造部海洋構造研究室長 ** 国土交通省国土技術政策総合研究所 港湾研究部港湾計画研究室長 *** 国土交通省国土技術政策総合研究所 港湾研究部港湾計画研究室研究員 〒239-0826 横須賀市長瀬3-1-1 独立行政法人港湾空港技術研究所 電話:046-844-5060 Fax:046-844-0255 e-mail:[email protected] -3- 1.はじめに 船舶の接岸速度,仮想質量係数,偏心係数)の確率分布 を考慮して,1次信頼性理論(FORM)による信頼性解析 を適用して防衝工の性能照査式の部分係数を算定する. 近年,土木・建築分野における構造物の設計体系が, 設計手法を規定する仕様規定型の現行基準から,設計さ 本研究で採用した防衝工設計法における部分係数の算 れる構造物の要求性能を規定する性能規定型の新基準へ 定方法は,長尾ら(2003)が提案しているものである. と大きく移行してきている.性能規定型の新基準では, 一方,高橋ら(2006)は,最新の船舶の諸元データ(Lloyd’s 構造物の設計において照査すべき限界状態を明確にした Marine Intelligence Unite,2004;日本海運集会所,2004) 限界状態設計法の考え方を基本に,構造物の性能照査法 に基づいて,新たな船種の区分に対する船舶の排水量(排 に確率統計理論に基づいて構造物の安全性評価を行う信 水トン数)の回帰式を提示している.本研究は,基本的 頼性設計法が取り入れられてきている.信頼性設計法の に,高橋ら(2006)が提示している船種の区分および船 中で最も簡易的な手法であるレベル1信頼性設計法(部分 舶の排水量の回帰式を用いて,長尾ら(2003)が提案し 係数法)は,今後の標準的な構造物の設計法として採用 ている部分係数の算定方法に従って検討したものである. すべき方向性が示されている(国土交通省,2002).この 2.信頼性設計法 ような背景の中で,「港湾の施設の技術上の基準・同解 説」(運輸省港湾局監修,1999)(以下,現行技術基準と 記す)の次期技術基準への改訂が進められており,信頼 2.1 信頼性設計法および性能照査 性設計法が全面的に導入されることが考えられている (1) 信頼性設計法の設計レベル (長尾,2002) . 防衝工の信頼性設計法における部分係数を算定するた これまで行われてきた防衝工の信頼性設計法に関する めに,信頼性理論に基づいた信頼性設計法を適用してい 検討としては,上田ら(2000) ,Ueda et al.(2002a,2002b) , る.信頼性設計法には,レベル1,レベル2およびレベル3 平野(2002),長尾ら(2003),米山ら(2004)などの事 の3つのレベルがあるが,これら3つのレベルの信頼性設 例がある.上田ら(2000) ,Ueda et al.(2002a,2002b)お 計法の特徴は以下のようになる(星谷ら,1986;トフ−ク よび平野(2002)は,確率統計的手法を用いて船舶の接 リステンセンら,1986). 岸エネルギーおよび防衝工の吸収エネルギーの算定式の a)レベル3信頼性設計法 各パラメータの確率分布を推定し,モンテカルロシミュ 構造物の破壊確率を算定する最も厳密な方法であり, レーションにより防衝工の破壊確率を算定して,接岸エ 性能関数を構成する確率変数の確率密度関数が完全にわ ネルギーに対する部分係数である異常接岸係数(Factor かっている場合に採用することができる.一般的には設 for Abnormal Impact)を求めている.また,長尾ら(2003) 計された構造物の性能照査に用いられる. は,平野(2002)が推定した船舶の接岸エネルギーおよ b)レベル2信頼性設計法 び防衝工の吸収エネルギーの算定式の各パラメータの確 構造物の信頼性指標を反復収束計算により算定する近 率 分 布 を 用 い , 1 次 信 頼 性 理 論 ( FORM: First-Order 似的な方法であり,性能関数を構成する確率変数の確率 Reliability Method)を適用して,船舶の接岸エネルギーの 密度関数が不明な場合でも,それらの2次までのモーメン 算定式を構成する各パラメータに対して部分係数を提案 ト(平均値,標準偏差)がわかっていれば採用すること している.一方,米山ら(2004)は,温度補正係数およ ができる.レベル3信頼性設計法よりも汎用性が高く,一 び速度補正係数を用いた防衝工設計法が導入されつつあ 般的には設計された構造物の性能照査に用いられる. る と い う 国 際 的 動 向 ( PIANC , 2002 ; 国 際 航 路 協 会 c)レベル1信頼性設計法 (PIANC),2005)に基づいて,これらの補正係数を考慮 抵抗係数および荷重係数のような部分係数を用いた性 した防衝工の安全性評価を信頼性解析により行い,レベ 能照査式により,構造物の設計や性能照査を行う準確率 ル1信頼性設計法における部分係数を算定している. 論的な方法である.一般的に荷重強度係数設計法(星谷 本研究では,現行の防衝工の設計法にレベル1信頼性 ら,1986;Haldar et al.,2000)あるいは部分係数法を意 設計法を導入するために,船種に対応した防衝工の性能 味し,限界状態設計法においてよく用いられる.レベル2 照査式(船舶の接岸エネルギーと防衝工の吸収エネルギ 信頼性設計法はレベル1信頼性設計法と関連しており,前 ーの比較式)の部分係数について検討し,それらの標準 者による信頼性指標の算定方法を応用することにより, 値を提案することを目的とする.このとき,防衝工の設 後者で用いられる部分係数を設定するのが合理的とされ 計に関する各パラメータ(船舶の質量(満載時の排水量), ている. -4- 照査式は,一般的には,次式として表される(星谷ら, 表-1 信頼性設計法の性能照査式および基準パラメータ レベル レベル3 レベル2 レベル1 性能照査式 Pf ≤ PfT β ≥ βT Rd ≥ S d ⇔ γ R Rk ≥ γ S S k 基準パラメータ 破壊確率 信頼性指標 設計用値 部分係数 1986;白石ら,1987;Haldar et al.,2000) .この式におい て,記号 γ はその添え字に関する部分係数であり,添字 k および d はそれぞれ特性値および設計用値を示す. n n i=1 i=1 Rd = γ R Rk ≥ γ g ∑ γ Si Sik = γ g ∑ Sid 表-1は, 3つのレベルの信頼性設計法の性能照査式お (2) よび基準パラメータを示したものである(吉岡ら,2005). ここに, 最も高位に属するレベル3信頼性設計法は,構造物の破壊 Rd :構造物の抵抗力の設計用値 確率 Pf が目標破壊確率 PfT を下回ることを確認して,構 Rk :構造物の抵抗力の特性値 造物の安全性を評価する方法である.また,レベル2信頼 γ R :抵抗力に対する部分係数 γ g :構造物係数 性設計法は,構造物の信頼性指標 β が目標信頼指標 βT を 上回ることを確認して,構造物の安全性を評価する方法 である.破壊確率と信頼性指標の関係は,後に示すよう γ Si :荷重 Si に対する部分係数 に,破壊確率が小さいほど信頼性指標が大きくなるとい Sik : i 番目の荷重の特性値 う逆の関係にある.一方,レベル1信頼性設計法は最も平 Sid : i 番目の荷重の設計用値 n :荷重の数 易な方法であり,構造物の抵抗力の設計用値 Rd が荷重の である. 設計用値 Sd を上回ることを確認して,構造物の設計や性 例えば,性能関数を Z = R − S とすると,構造物の安全 能照査を行う方法である.この設計用値に関する関係式 Rd ≥ Sd は,構造物の抵抗力の特性値 Rk および部分係数 性の性能照査式は,次式のように表される. γ R , 荷 重 の 特 性 値 Sk お よ び 部 分 係 数 γ S を 用 い て , γ R Rk ≥ γ S Sk として表される. Rd ≥ Sd ⇔ γ R Rk ≥ γ S S k (3) (2) 性能関数 ここに, 構造物の性能関数とは,構造物の破壊の発生を検討す る上で導入された破壊確率を計算するための基準となる Rd :構造物の抵抗力の設計用値 関数のことである.最も基本的な性能関数として,次式 Sd :荷重の設計用値 がある. Rk :構造物の抵抗力の特性値 Sk :荷重の特性値 Z = R−S γ R :抵抗力に対する部分係数 γ S :荷重に対する部分係数 (1) である. ここに, ここでは,構造物の重要度や限界状態に達した場合の Z :性能関数 R :抵抗力 社会的影響度などを考えた全体的な部分係数である構造 S :荷重 物係数の値は1.0としている. である. 2.2 破壊確率および信頼性指標 性能関数 Z が負のとき構造物が破壊されると定義され (1) 破壊確率 ることから,性能関数の確率密度関数を Z ≤ 0 について積 一般的な性能関数を n 個の確率変数 X i ( i = 1,2, 分することにより,構造物の破壊確率が求められる.ま ,n ) で次式のように表す. た, Z = 0 とした式は,構造物が破壊するかしないかの限 界状態を表す限界状態方程式となる.一般的に,性能関 Z = g(X1 , X 2 , 数を構成する抵抗力および荷重の確率変数は相関をもた , Xn ) ≤ 0 (4) ない(すなわち独立)と仮定される. ここに, (3) 性能照査式 g(X1 , X 2 , レベル1信頼性設計法における構造物の安全性の性能 である. -5- , X n ) : n 個の確率変数で構成される性能関数 このとき,破壊確率は,確率変数の同時確率密度関数 確率密度関数 を用いて次式のようになる. p 構造物の破壊領域 Pf = ∫∫ Z≤ 0 ∫ f X1 ,X 2 , ,X n (x1 , x 2 , , x n )dx1 dx 2 dx n (5) 抵抗力 R 荷重 S ここに, Pf :破壊確率 f X1 ,X2 , ,X n (x1 , x 2 , , x n ) :確率変数 n 個の同時確率密度 関数 である. 荷重 S 抵抗力 R 同時確率密度関数において,各々の確率変数が互いに 独立であるとすれば,式(5)は次式となる. 図-1 確率密度関数と破壊確率の関係 Pf = ∫∫ Z≤ 0 ∫ f X1 (x1 ) f X 2 (x 2 ) f X n (x n )dx1 dx 2 dx n (6) また,性能関数の確率密度関数 f Z (z ) を用いて,上式は 次式のように変形できる. ここに, f X i (x i ) :確率変数 X i ( i = 1,2, , n )の確率密度関数 Pf = である. ∫−∞ f Z (z)dz 0 (8) ここで,性能関数が先に示した Z = R − S であると仮定 する.抵抗力 R および荷重 S の確率密度関数を用いると, ここに, 抵抗力と荷重は互いに独立であるとして,破壊確率は次 z :性能関数の変数 f Z (z ) :性能関数の確率密度関数 式のようになる. である. Pf = P(R − S ≤ 0) = ∫∫ f R ,S (r,s)drds ∫∫ f R (r) f S (s)drds 一般的に上式は解析的に計算できないため,性能関数 の確率密度関数の数値積分やモンテカルロシミュレーシ Z≤ 0 = ョン(星谷ら,1986)によって数値的に破壊確率を計算 (7) する必要がある. Z≤ 0 (2) 信頼性指標 ここに, 信頼性指標とは,構造物の安全性・信頼性を評価する r :抵抗力の変数 ための尺度であり,性能関数の平均値および標準偏差を s :荷重の変数 f R ,S (r,s) :抵抗力および荷重の同時確率密度関数 用いて簡便に構造物の安全性・信頼性を評価しようとい f R (r ) :抵抗力の確率密度関数 することによって構造物の安全性・信頼性を評価するの f S (s) :荷重の確率密度関数 が最も良いと考えられるが,確率変数が簡単な確率密度 うものである.厳密に言えば,構造物の破壊確率を算定 関数で表せない場合が一般的であることから,現実的に である. は破壊確率を計算することは容易ではない.これに対し, 図-1は,荷重および抵抗力の確率密度関数と破壊確率 の関係を表している.荷重の確率密度関数と抵抗力の確 性能関数の平均値および標準偏差から算定できる信頼性 率密度関数がオーバーラップしている部分が構造物の破 指標を用いれば,構造物の破壊確率を算定する場合と比 壊領域となり,この部分を基に構造物の破壊確率が算定 較して,より簡単に構造物の安全性・信頼性を評価する される. ことが可能になる. 性能関数の平均値および標準偏差をそれぞれ µ Z およ び σ Z とすると,信頼性指標は次式で表される. -6- β= µZ σZ Φ( ⋅ ) :標準正規確率分布関数 (9) µ R :抵抗力 R の平均値 σ R :抵抗力 R の標準偏差 µ S :荷重 S の平均値 σ S :荷重 S の標準偏差 ここに, µ Z :性能関数の平均値 σ Z :性能関数の標準偏差 β :信頼性指標 である. である. 規分布に従う場合には,構造物の破壊確率と信頼性指標 すなわち,性能関数が線形関数で各々の確率変数が正 (3) 破壊確率と信頼性指標の関係 の間には次式のような正確な対応関係がある(トフ−クリ 図-2は,性能関数の確率密度関数と破壊確率および信 ステンセンら,1986;長,1993). 頼性指標の関係を示したものである.性能関数の確率密 Pf = Φ(−β ) ⇔ β = −Φ −1 (Pf ) 度関数の Z ≤ 0 の部分を積分したものが,構造物の破壊確 (11) 率となる.また,信頼性指標は,性能関数の確率密度関 数の平均値が Z = 0 の位置からどの程度(標準偏差の何倍 この場合には,破壊確率と信頼性指標は標準正規確率 まで)離れているかを示す尺度であり,安全性の余裕を 分布関数によって関係づけられているので,構造物の信 表す.この図から,構造物の破壊確率と信頼性指標とは, 頼性指標から破壊確率を算定することは(またその逆も) 性能関数の確率分布によって一意的に関係づけられるこ 容易である.一方で,構造物の破壊確率と信頼性指標と とがわかる. の間には,各々の確率変数がどのような確率分布であっ ても,次式の近似的な関係が成り立つことが分かってい る(長,1993) . p Pf ≈ Φ(−β ) ⇔ β ≈ −Φ −1 (Pf ) βσ Z 安全領域 (12) ただし,信頼性指標の値が大きくなるような構造物の 破壊確率が非常に小さい場合には,上の左側の関係式 破壊領域 Pf ≈ Φ(−β ) は成立するとは限らない.しかしながら,こ のような場合でも上の右側の関係式 β ≈ −Φ −1 (Pf ) は成立 Pf = P(Z ≤ 0) すると言われている(長,1993). Z>0 Z≤0 0 µZ 2.3 信頼性指標の算定法 Z (1) 1次信頼性理論(FORM) 1次信頼性理論(FORM: First-Order Reliability Method) 図-2 性能関数の確率密度関数と破壊確率 による信頼性解析として,レベル2信頼性設計法による信 および信頼性指標の関係 頼性指標の算定法について説明する.レベル2信頼性設計 法には,大きく分けて1次近似2次モーメント法(FOSM法: ここで,性能関数が Z = R − S で表され,抵抗力 R およ First-Order Second-Moment method) ,改良1次近似2次モー び荷重 S が互いに独立で共に正規分布に従う場合を考え メント法(AFOSM法: Advanced First-Order Second-Moment る.この場合には,性能関数も正規分布に従うことから, method ), 1 次 ガ ウ ス 近 似 法 ( First-Order Gaussian 破壊確率は次式により簡単に求めることができる. Approximation method)の3種類の手法がある.本研究では, 最も正確な手法である1次ガウス近似法(トフ−クリステ ⎛ µ −µ ⎛ µ ⎞ S Pf = Φ(−β ) = Φ⎜− Z ⎟ = Φ⎜⎜− R 2 +σ 2 ⎝ σZ ⎠ σ ⎝ R S ⎞ ⎟⎟ ⎠ ンセンら,1986;星谷ら,1986;伊藤ら,1988;長,1993; (10) Haldar et al.,2000)を採用する.1次ガウス近似法は,改 良1次近似2次モーメント法の一種であり,非正規確率変 数を正規確率変数で正規化近似することにより,性能関 数を構成する確率変数が非正規確率変数を含んでいる場 ここに, -7- (2) 信頼性指標の算定手順 合も対象とすることができる. 1次ガウス近似法では,以下の手順で信頼性指標を算定 信頼性指標は,確率論的には,性能関数の平均値およ び標準偏差から定義される.一方,幾何学的には,性能 する(伊藤ら,1988;Haldar et al.,2000) . 関数を構成する確率変数を標準正規化することにより性 1)設計点の初期値の仮定 能関数を標準化空間に写像変換すると,信頼性指標は, 設計点の初期値を確率変数の平均値等の値として仮定 標準化空間における原点と性能関数で表される破壊曲面 する. との最短距離になる.このとき,信頼性指標を決定する 2)設計点における非正規確率変数の正規化 破壊曲面上の点が設計点である.標準化空間における性 確率変数のうち正規確率変数以外のものは,設計点に 能関数,信頼性指標および設計点の関係を示すと,図-3 おける確率密度関数の値および確率分布関数の値が各々 のようになる. 等しくなるような正規確率変数で正規化近似する. 性 能 関 数 を Z = g(X1 , X 2 , 1次ガウス近似法による信頼性指標の算定においては, , Xn ) , 設 計 点 を 性能関数の定義式,確率変数の確率密度関数および確率 x = (x , x , 分布関数が既知であることが前提となる.ここでは,最 近似正規分布と記す)の平均値および標準偏差を µ XNi およ * * 1 * 2 , x ) ,正規化近似後の正規確率分布(以下, * n も一般的な性能関数が非線形関数で各々の確率変数が非 び σ XNi とする.図-4を参照して,設計点において,元の確 正規分布に従う場合を考える.この場合,信頼性指標は 率分布関数の値と正規確率分布関数の値および元の確率 反復法による収束計算によって求められる. 密度関数の値と正規確率密度関数の値が等しいとすると, 式(13)および式(14)のように表すことができる(星谷ら, X2′ 1986;長,1993). 限界状態方程式 g( X′) = 0 ⎛ x *i − µ N Xi PX i (x *i ) = Φ⎜⎜ N ⎝ σ Xi 破壊領域 テーラー展開1次近似 ⎛ ∂g ⎞ ⎟⎟ g( X′) = ∑ ( Xi′ − x ′i *)⎜⎜ ⎝ ∂Xi′⎠ Xi′=x ′i * i=1 設計点 2 pXi (x *i ) = x′* 信頼性指標 1 σ XNi ⎞ ⎟⎟ ⎠ (i = 1, 2, ,n) (13) ⎛ x *i − µ N ⎞ Xi ⎟⎟ (i = 1, 2, N σ Xi ⎝ ⎠ ,n) (14) φ ⎜⎜ β 安全領域 ここに, X1′ X i :確率変数( i = 1,2, ,n ) x x *i :確率変数 X i に対する設計点 * :確率変数空間上の設計点 図-3 標準化空間における性能関数,信頼性指標 および設計点の関係 p, P φ, Φ PX i (x i* ) * Φ( x ′i ) Φ( x ′i ) N P (xi ) N p ( xi ) PXi (xi ) pXi (xi ) * p Xi ( xi ) φ ( xi′) φ ( xi′* ) x i* xi 図-4 設計点における非正規確率変数の正規化 -8- x i′ * x i′ PX i ( ⋅ ) :確率変数 X i の元の確率分布関数 以上の高次項を切り捨てた1次近似とすると,次式となる. pXi ( ⋅ ) :確率変数 X i の元の確率密度関数 Φ( ⋅ ) :標準正規確率分布関数 n ⎛ ∂g ⎞ , X n ) ≈ ∑ ( X ′i − x′i* )⎜ ⎟ ⎝ ∂X ′i ⎠X ′= x ′* i=1 Z = g(X1 , X 2 , φ ( ⋅ ) :標準正規確率密度関数 µ XNi :確率変数 X i の元の確率分布に対応する近似 i (19) i 正規分布の平均値 σ XNi :確率変数 X i の元の確率分布に対応する近似 ここに, x′* :標準化空間上の設計点, 正規分布の標準偏差 ただし, x′* = ( x1′* , x′2* , である. これらの式を, µ および σ について解くと次式のよ N Xi , x′n* ) である. x′i N Xi * :標準化空間上の標準化変数 うになる. X ′i に対する設計点 である. 図-3を参照すると,この式は破壊曲面の設計点におけ µ XNi = x *i − Φ−1 (PXi (x *i )) ⋅ σ XNi (i = 1, 2, ,n) φ (Φ −1 (PXi (x *i ))) σ XNi = (i = 1, 2, ,n) * (15) る接平面を表すことがわかる.すなわち,性能関数は, 標準正規確率変数から構成される線形1次式として近似 (16) pXi (x i ) される.このとき,性能関数の平均値および標準偏差は, この変換により,設計点の近傍において,元の(非正 ⎛ ∂g ⎞ ⎟ ⎝ ∂X ′i ⎠X i′= xi′* n µ Z = −∑ x′i * ⎜ 規)確率分布は近似的に正規確率分布(近似正規確率分 i=1 布)とみなされる.一般的には,設計点は,各々の確率 変数が従う確率密度関数の裾野の部分に位置することか σZ = ら,このような近似方法は正規裾野近似とも呼ばれてい n ⎛ ∂g ⎞2 ∑ ⎜⎝∂X′ ⎟⎠ i=1 る(長,1993) . (20) i (21) X i′= xi′* 3)確率変数の標準正規化 となる. 性能関数を構成する確率変数を標準正規化することに 5)信頼性指標および新たな設計点の算定 より,性能関数を標準正規確率変数で構成される標準化 未知数とする信頼性指標および原点と設計点を結ぶ単 空間上に写像変換する. 位ベクトルの方向余弦によって設計点を定義し,性能関 確率変数の標準正規化は,次式として表される. 数に代入して信頼性指標について解くことにより,信頼 X ′i = Xi − µ σ XNi N Xi (i = 1, 2, , n) 性指標を算定する.得られた信頼性指標から新たな設計 (17) 点を算定する. 標準化空間において,信頼性指標は,性能関数で表さ れる破壊曲面までの原点からの最短距離,すなわち設計 ここに, X ′i :標準化空間上の標準化変数( i = 1,2, ,n ) 点と原点の距離になる.従って,標準化空間における設 X i :確率変数空間上の確率変数( i = 1,2, ,n ) 計点は,信頼性指標 β および原点と設計点を結ぶ単位ベ クトルの方向余弦 α *i を用いて, である. よって,性能関数は次式となる. x′i* = −α *i β Z = g ( X1 , X 2 , , X n ) = g (µ XN1 + X1′σ XN1 , µ XN2 + X ′2σ XN2 , , µ XNn + X ′nσ XNn ) (18) (i = 1, 2, , n) (22) と表すことができる. ここに, α *i :標準化空間における i 番目の軸に対する原点と 4)設計点における性能関数の線形化 構造物の破壊が最も生じやすい性能関数上の設計点ま 設計点を結ぶ単位ベクトルの方向余弦 わりで,性能関数をテーラー展開することにより線形化 β :信頼性指標 近似する. である. この原点と設計点を結ぶ単位ベクトルの方向余弦 α *i を 性能関数を設計点においてテーラー展開したとき,2次 -9- であるから,この荷重に対して目標信頼性指標を満足す 一般に感度係数と呼んでいる. るような抵抗力を有する構造物を設計することになる. 一方,信頼性指標は,性能関数の平均値および標準偏 このことから,荷重の確率分布を既知として,目標信頼 差を用いると次式のようになる. 性指標を満足するような構造物の抵抗力の確率分布を求 β= µZ = σZ n ⎛ ∂g ⎞ −∑ x′i* ⎜ ⎟ ⎝ ∂X ′i ⎠Xi′= xi′* i=1 めることで,部分係数を算定することができる.例えば, 抵抗力の確率統計的特性のうち平均値を未知数として, (23) ⎛ ∂g ⎞2 ∑ ⎜⎝∂X′ ⎟⎠ i X i′= xi′* i=1 目標信頼性指標に対応する性能関数上の設計点を反復収 n 束計算により算定し,その設計点の値と確率変数の特性 値との比から部分安全係数を求める方法がある(トフ−ク リステンセンら,1986;星谷ら,1986;伊藤ら,1988). (2) 部分係数の算定式 従って,上式の関係および原点と設計点を結ぶ単位ベ 部分係数は,目標信頼性指標に対応する性能関数上の クトルの長さが1であることから,感度係数は, 設計点の値と確率変数の特性値との比によって,一般に α *i = ⎛ ∂g ⎞ ⎜ ⎟ ⎝ ∂X ′i ⎠X i′= xi′* 次式のように定義される(トフ−クリステンセンら, 1986;伊藤ら,1988) . (24) ⎛ ∂g ⎞2 ∑ ⎜⎝∂X′ ⎟⎠ i X i′= xi′* i=1 n γ Xi = となる.よって,元の確率変数空間における設計点は, x *i µ XNi − σ XNi ⋅ α *i βT = x˜ i x˜ i (i = 1, 2, ,n) (26) ここに, γ Xi :確率変数 X i ( i = 1,2, , n )に対する部分係数 x *i = µ XNi + σ XNi ⋅ x′i* = µ XNi − α *i βσ XNi (i = 1, 2, ,n) x˜ i :確率変数 X i の特性値 (25) x *i :元の確率変数空間における確率変数 X i に対する として表される. 設計点 この設計点を限界状態方程式 Z = g(x , x , * 1 * 2 µ および σ XNi :確率変数 X i に対する近似正規分布の ,x ) = 0 N Xi * n へ代入し,未知数である信頼性指標 β について解き,信 平均値および標準偏差 たな設計点を求める. α *i :確率変数 X i に対する感度係数 βT :目標信頼性指標 6)反復法による収束計算 である. 頼性指標を算定する.また,得られた信頼性指標から新 新たに算定された設計点を用いて,信頼性指標の値が 3.防衝工設計法 収束するまで,2)~5)の手順を繰り返し実行する.収束計 算の後,最終的に信頼性指標および設計点が求められる. なお,より一般的には,相関をもつ確率変数を相関を 3.1 防衝工設計法の動向 (1) 従来の設計手法 もたない確率変数へ変数変換する必要がある. 従来の防衝工の設計手法では,船舶の接岸エネルギー 2.4 部分係数の算定式 の算定式を用いて,接岸エネルギーの計算値が防衝工の (1) 概要 吸収エネルギーの推定値よりも小さいことを確認し,防 一般的には,1次ガウス近似法による信頼性指標の算定 衝工を選定する.防衝工の各メーカーが発行しているカ 法の逆問題として,部分係数を算定することができる(星 タログには,防衝工の性能に関して,規定の試験方法に 谷ら,1986) .部分係数は,信頼性設計法の一つである部 より求められた吸収エネルギーや反力などの特性が記載 分係数法により,目標とする安全性を有する構造物を性 されている.防衝工の吸収エネルギーの推定値は,カタ 能照査式に従って簡便に設計するために用いるものであ ログに記載されている吸収エネルギーの性能値に防衝工 る.構造物の設計においては,性能照査式が式(3)のよう の製造上の誤差(性能公差)を考慮して求められる.船 に荷重と構造物の抵抗力によって表現されるとすると, 舶の接岸エネルギーは,船舶の質量,船舶の接岸速度, 構造物の建設地点における荷重の確率統計的特性は既知 仮想質量係数,偏心係数,柔軟性係数,バースの形状係 -10- があると指摘されている. 数を用いて,次式により算出することができる. (4) PIANC(国際航路協会)による新しい防衝工設計法 Ef = 1 MVb2C mC e C sC c 2 の提案 (27) PIANC(国際航路協会)は,船舶の係留施設における 接岸用防衝工の設計法および防衝工の性能試験に関する ここに, 国 際 標 準 を 作 成 し た ( PIANC , 2002 ; 国 際 航 路 協 会 E f :船舶の設計接岸エネルギー(kNm) (PIANC),2005).このガイドラインの中には,防衝工 M :船舶の質量(t) について,統一的な性能試験法,性能の表示法,船舶の Vb :船舶の接岸速度(m/s) 接岸速度および温度などの使用環境条件に対する性能の C m :仮想質量係数 変化を考慮した設計法などが提案されている. C e :偏心係数 防衝工の性能試験で得られた性能特性については,防 C s :柔軟性係数 衝工のメーカーのカタログに記載されることになる.防 C c :バースの形状係数 衝工の性能特性の温度依存性および速度依存性は,それ である. ぞれ温度補正係数(Temperature Factor)および速度補正係 なお,柔軟性係数 C s およびバースの形状係数 C c は,1.0 数(Velocity Factor)として示される.防衝工を設計する 場合には,これらの補正係数を考慮して吸収エネルギー とすることが一般的である. (2) 防衝工の種類 を算定する. 防衝設備として用いる防衝工は,ゴム防舷材,空気式 防衝工の設計法については,限界状態設計法に基づく 防舷材が一般的である.防舷材の反力特性は,定反力型 荷重係数設計法が導入されている.この設計法では,荷 と反力漸増型に分けられ,ゴム防舷材および空気式防舷 重係数として異常接岸係数(Factor for Abnormal Impact) 材はそれぞれ定反力型および反力漸増型の特性を有して を用いて,船舶の接岸エネルギー算定式による計算値に いる.また,防舷材の素材について見ると,我が国では, この係数を乗じた値を設計接岸エネルギーとする.異常 通常,天然ゴムを素材とするゴム防舷材が使用されてい 接岸(Abnormal Impact)とは,通常の接岸(Normal Impact) る.一方,海外では,これに加えて合成ゴムを素材とす に対する概念であり,限界状態設計法の考え方に基づい るゴム防舷材についても製造され,一般的に使用されて て終局限界状態として船舶の極限状態の接岸を考えたも いる. のである.異常接岸係数の数値としては,船舶の種類に (3) 防衝工の性能の変化 もよるが,1.25~2.0が提案されている.なお,船舶の接 防衝工として一般的に用いられるゴム防舷材には,使 岸エネルギーの算定式およびそのパラメータについては 用環境条件によって以下のような性能の変化があること 従来の方法と同様である.また,防衝工の吸収エネルギ が知られている(運輸省港湾局監修,1999) . ーは,カタログから防衝工の性能特性を読み取り,性能 (a)動的荷重時の圧縮特性の変化 公差,温度補正係数および速度補正係数を考慮して算定 (b)繰り返し荷重時の圧縮特性の変化 する.最終的に,設計接岸エネルギーが防衝工の吸収エ (c)傾斜荷重時の圧縮特性の変化 ネルギーの算定値よりも小さいことを確認し,防衝工を (d)温度変化時の圧縮特性の変化 選定する. (e)経年変化後の圧縮特性の変化 PIANCの提案による防衝工の設計法では,次式を用い (f)クリープ後の圧縮特性の変化 ることになる. 船舶係留用の防衝工に関しては,温度の影響あるいは ES = φEcat RT RV ≥ γ f E f 船舶の接岸速度の影響については,一般的には考慮され (28) てきていない.これは,我が国で使用されている天然ゴ ムの防舷材は,通常の温度の条件あるいは接岸速度の条 ここに, 件では性能特性の変動幅が比較的小さいため,特にこれ ES :防衝工の吸収エネルギー(kNm) らの影響を考慮する必要がないからである.一方,海外 Ecat :防衝工の吸収エネルギーの規格値(kNm) で使用されている合成ゴムの防舷材は,温度変化の影響 φ :防衝工の製造上の誤差(性能公差)(通常 φ =0.9) および船舶の接岸速度の影響を大きく受けるため,これ RT :温度補正係数 らの温度依存性および速度依存性の影響を考慮する必要 RV :速度補正係数 -11- E f :船舶の接岸エネルギーの設計値(kNm) うに定義される.これらの式において,記号 γ はその添え γ f :異常接岸係数 字に関する部分係数であり,添字 k および d はそれぞれ特 である. 性値および設計用値を示す. 式(28)は性能照査式を表し,異常接岸係数を考慮した船 舶の設計接岸エネルギーが防衝工の吸収エネルギーの算 M d = DT d = γ DT DT k (31) 定値よりも小さいことにより,防衝工の性能を照査する. Vbd = γ Vb Vbk (32) C md = γ CmC mk (33) C ed = γ CeC ek (34) 3.2 防衝工の性能照査の考え方 レベル1信頼性設計法による防衝工の性能照査の考え 方について説明する.防衝工の信頼性設計法における性 ここに, 能関数は,PIANCの提案による防衝工の吸収エネルギー の算定式と船舶の接岸エネルギーの算定式を組み合わせ DT :船舶の満載時の排水量(排水トン数)(t) DT d :船舶の満載時の排水量の設計用値(t) て,次式のように表される. DT k :船舶の満載時の排水量の特性値(t) Vbk :船舶の接岸速度の特性値(m/s) Z = φEcat RT RV − 1 MVb2C mC e 2 C mk :仮想質量係数の特性値 (29) C ek :偏心係数の特性値 Z :性能関数 Ecat :防衝工の吸収エネルギーの規格値(kNm) γ DT :船舶の満載時の排水量に対する部分係数 γ Vb :船舶の接岸速度に対する部分係数 γ Cm :仮想質量係数に対する部分係数 γ Ce :偏心係数に対する部分係数 φ :防衝工の製造上の誤差(性能公差)(通常 φ =0.9) である. ここに, RT :温度補正係数 防衝工の性能照査式では,防衝工の吸収エネルギーを RV :速度補正係数 構成する各パラメータ(防衝工の性能公差 φ ,速度補正係 M :船舶の質量(t) 数 RT ,温度補正係数 RV )を確定値としている.これらの Vb :船舶の接岸速度(m/s) パラメータについては,多数の一般的な防衝工を対象と C m :仮想質量係数 した特性に関する統計データが十分蓄積されていないた C e :偏心係数 め,その確率分布を推定することができず,部分係数を である. 用いないこととした.また,防衝工の吸収エネルギーの ここでは,柔軟性係数 C s およびバースの形状係数 C c は, 1.0としている. 規格値 Ecat ,温度補正係数 RT ,速度補正係数 RV は,メー カーによる性能試験および評価によって求められ,カタ レベル1信頼性設計法における防衝工の性能照査式は, ログに記載された数値を用いる必要があるが,現状では, 次式として表される.この式において,添字 d は設計用 温度補正係数 RT および速度補正係数 RV のデータは提示 値を示している. されていない.そこで,現在のところ,式(30)を用いた防 衝工の性能照査においては,防衝工の性能公差 φ を下限値 φEcat RT RV ≥ 1 M d Vbd2 C md C ed 2 の0.9,速度補正係数 RT および温度補正係数 RV を1.0とし (30) てよいものとする.これらのことを考慮して,式(30)を改 めて書き直すと,次式のようになる. ここに, M d :船舶の質量の設計用値(t) Ecat ≥ Vbd :船舶の接岸速度の設計用値(m/s) 1 M d Vbd2 C md C ed 0.9 2 (35) C md :仮想質量係数の設計用値 C ed :偏心係数の設計用値 本研究では,レベル1信頼性設計法における防衝工の性 能照査式として,式(35)を採用している. である. 船舶の接岸エネルギーを算定するための各パラメータ の設計用値は,部分係数および特性値を用いて以下のよ -12- 4.部分係数 また,表-3(1)~(10)に船種別の船型および主要諸元の 一覧を示す.総トン数(GT)は,国際総トン数を基本と 4.1 検討の手順 しているが,国内総トン数を用いている場合にはその旨 本研究では,以下の検討手順により,防衝工の性能照 を表の下に記している.これらの表で示している主要諸 査式の部分係数を算定する.ここでは,検討内容につい 元は,全長,垂線間長,型幅,満載喫水であり,現存す て項目ごとに簡略に述べる. る船舶の諸元データを用いた統計解析により,主にそれ 1)船種の選定 ぞれの段階的なトン数における全体のカバー率75%値と 高橋ら(2006)が提示している船種の区分に基づいて, して設定されたものである.ここで,船舶全体のカバー 船種を選定する. 率とは船舶の信頼度を意味しており,ある値以下の諸元 2)パラメータの確率分布の設定 を有する船舶数の船舶総数に対する割合を確率統計的に 防衝工の性能照査式における各パラメータ(船舶の質 求めたものである.例えば,船舶全体のカバー率75%と 量(満載時の排水量),船舶の接岸速度,仮想質量係数, は,船舶総数に対して75%の船舶がそのカバー率に対応 偏心係数)の確率的変動特性を,船種ごとの載荷重量ト する値以下の諸元を有していることになる.表-2および ン数(DWT)または総トン数(GT)に対する適切な確率 表-3(1)~(10)から,船種10種類に対して船種別の船型数 分布を有する回帰式として設定する. を考慮した全体の検討ケースは,合計79ケースとなる. 3)防衝工の規格値の設定 防衝工の性能関数を対象とした1次信頼性理論 (FORM)による信頼性解析において,防衝工の規格値を 表-2 対象とする船種およびトン数の範囲 船種 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー 初期値からパラメトリックに変化させることにより,目 標破壊確率0.01を満足する防衝工の規格値および感度係 数の値を船種・船型ごとに算定する.信頼性解析では, 1次信頼性理論(FORM)によって対象構造物の信頼性指 標および破壊確率を求めることができる信頼性解析プロ グラムを用いている. 4)目標信頼性指標の算定 船種・船型ごとに感度係数の値を固定して,目標信頼 性指標の値を初期値からパラメトリックに変化させてレ トン数の設定 1,000~150,000 10,000~100,000 1,000~300,000 3,000~60,000 3,000~60,000 3,000~60,000 20,000~100,000 3,000~100,000 400~13,000 6,000~20,000 単位 DWT DWT DWT GT GT GT GT GT GT GT ベル1信頼性設計法による防衝工の試設計を実施し,防 衝工の設計値が設定した防衝工の規格値と最も近くなる 場合を目標信頼性指標の最適値とする. 表-3(1) 貨物船の船型および主要諸元 5)部分係数の算定 最終的に,各パラメータの確率分布および目標信頼性 指標の最適値を用いて,船種・船型ごとに防衝工の性能 照査式の部分係数の値を算定する. 4.2 船種の選定 対象とする船種およびトン数(載荷重量トン数(DWT) または総トン数(GT))は,高橋ら(2006)が提示してい る船種の区分に基づいて,表-2のように10種類の船種を 設定する.10種類の船種は,貨物船,コンテナ船,タン カー,ロールオン・ロールオフ(RORO)船,自動車専用 (PCC)船,LPG船,LNG船,旅客船,中短距離フェリー (航海距離300km未満),長距離フェリー(航海距離300km 以上)である.以下の論文中では,ロールオン・ロール オフ船をRORO船,自動車専用船をPCC船と略記する. -13- 載荷重量 トン数 DWT (トン) 1,000 2,000 3,000 5,000 10,000 12,000 18,000 30,000 40,000 55,000 70,000 90,000 120,000 150,000 全長 Loa (m) 67 82 92 107 132 139 156 182 198 217 233 251 274 292 垂線 間長 Lpp (m) 61 75 85 99 123 130 147 171 187 206 222 239 261 279 型幅 B (m) 10.7 13.1 14.7 17.0 20.7 21.8 24.4 28.3 30.7 32.3 32.3 38.7 42.0 44.7 満載 喫水 d (m) 3.8 4.8 5.5 6.4 8.1 8.6 9.8 10.5 11.5 12.8 13.8 15.0 16.5 17.7 表-3(6) LPG船の船型および主要諸元 表-3(2) コンテナ船の船型および主要諸元 載荷重量 トン数 DWT (トン) 10,000 20,000 30,000 40,000 50,000 60,000 100,000 全長 Loa (m) 139 177 203 241 274 294 350 垂線 間長 Lpp (m) 129 165 191 226 258 279 335 型幅 B (m) 22.0 27.1 30.6 32.3 32.3 35.9 42.8 満載 喫水 d (m) 7.9 9.9 11.2 12.1 12.7 13.4 14.7 全長 Loa (m) 63 77 86 100 139 154 166 184 209 228 243 250 277 334 垂線 間長 Lpp (m) 57 72 82 97 131 146 157 175 199 217 232 238 265 321 型幅 B (m) 11.0 13.2 14.7 16.7 20.6 23.4 25.6 29.1 34.3 38.1 41.3 42.7 48.6 59.4 満載 喫水 d (m) 4.0 4.9 5.5 6.4 7.6 8.6 9.3 10.4 12.0 12.9 14.2 14.8 17.2 22.4 全長 GT (トン) 3,000 5,000 10,000 20,000 40,000 60,000 Loa (m) 120 140 172 189 194 208 垂線 間長 Lpp (m) 110 130 162 174 174 189 型幅 B (m) 18.9 21.4 25.3 28.0 32.3 32.3 満載 喫水 d (m) 5.8 6.5 7.7 8.7 9.7 9.7 表-3(5) PCC船の船型および主要諸元 全長 GT (トン) 3,000 5,000 12,000 20,000 30,000 40,000 60,000 Loa (m) 112 130 135 158 179 185 203 垂線 間長 Lpp (m) 103 119 123 150 175 175 194 型幅 B (m) 18.2 20.6 21.8 24.4 26.7 31.9 32.3 Loa (m) 98 116 144 179 204 223 240 型幅 B (m) 16.1 18.6 22.7 27.7 31.1 33.8 36.0 満載 喫水 d (m) 6.3 7.3 8.9 10.8 12.1 13.1 14.0 総トン数 全長 GT (トン) 20,000 30,000 50,000 80,000 100,000 Loa (m) 174 199 235 274 294 垂線 間長 Lpp (m) 164 188 223 260 281 型幅 B (m) 27.8 31.4 36.7 42.4 45.4 満載 喫水 d (m) 8.4 9.2 10.4 11.5 12.1 総トン数 全長 GT (トン) 3,000 5,000 10,000 20,000 30,000 50,000 70,000 100,000 Loa (m) 97 115 146 186 214 255 286 324 垂線 間長 Lpp (m) 88 104 131 165 189 224 250 281 型幅 B (m) 16.5 18.6 21.8 25.7 28.2 32.3 32.3 32.3 満載 喫水 d (m) 4.3 5.0 6.4 7.8 7.8 7.8 8.1 8.1 表-3(9) 中短距離フェリーの船型および主要諸元 (3,000,5,000,10,000GT:国内総トン数) 総トン数 GT (トン) 3,000 5,000 10,000 20,000 30,000 40,000 60,000 垂線 間長 Lpp (m) 92 109 136 170 193 212 228 表-3(8) 旅客船の船型および主要諸元 表-3(4) RORO船の船型および主要諸元 総トン数 全長 表-3(7) LNG船の船型および主要諸元 表-3(3) タンカーの船型および主要諸元 載荷重量 トン数 DWT (トン) 1,000 2,000 3,000 5,000 10,000 15,000 20,000 30,000 50,000 70,000 90,000 100,000 150,000 300,000 総トン数 満載 喫水 d (m) 5.5 6.2 6.8 7.9 8.8 9.3 10.4 総トン数 全長 GT (トン) 400 700 1,000 3,000 7,000 10,000 13,000 Loa (m) 56 70 80 124 141 166 194 垂線 間長 Lpp (m) 47 60 71 116 130 155 179 型幅 B (m) 11.6 13.2 14.4 18.6 22.7 24.6 26.2 満載 喫水 d (m) 2.8 3.2 3.5 4.6 5.7 6.2 6.7 (全て国内総トン数) 表-3(10) 長距離フェリーの船型および主要諸元 (3,000,5,000GT:国内総トン数) 総トン数 全長 GT (トン) 6,000 10,000 15,000 20,000 Loa (m) 147 172 197 197 (全て国内総トン数) -14- 垂線 間長 Lpp (m) 135 159 183 183 型幅 B (m) 22.0 25.1 28.2 28.2 満載 喫水 d (m) 6.3 6.3 6.9 6.9 4.3 パラメータの確率分布の設定 a DT :船舶の満載時の排水量の回帰式の傾き (1) 概要 aCm :仮想質量係数の回帰式の傾き 防衝工の性能関数における船舶の接岸エネルギーに関 aCe :偏心係数の回帰式の傾き するパラメータ(船舶の質量(満載時の排水量) ,船舶の PDT :船舶の満載時の排水量の回帰式周りの確率分布 接岸速度,仮想質量係数,偏心係数)は,船舶の載荷重 PVb :船舶の接岸速度の回帰式周りの確率分布 量トン数(DWT)あるいは総トン数(GT)に対する回帰 PCm :仮想質量係数の回帰式周りの確率分布 式として設定できる.船舶の満載時の排水量(排水トン PCe :偏心係数の回帰式周りの確率分布 数) ,仮想質量係数,偏心係数の回帰式は,最新の船舶の である. 諸元データ(Lloyd’s Marine Intelligence Unite,2004;日本 ここで,各パラメータの従う確率分布は,表-4に示す 海運集会所,2004)に基づいた統計解析により算定し, ように,船舶の満載時の排水量(排水トン数),仮想質量 線形回帰式とした.また,船舶の接岸速度については, 係数および偏心係数については正規分布,船舶の接岸速 上田ら(2000) ,Ueda et al.(2002a,2002b)および平野(2002) 度については対数正規分布となる.また,各パラメータ が提案している指数関数による非線形回帰式を適用した. の従う確率分布および回帰式の具体的な数値は,表-5(1) 各パラメータ(船舶の満載時の排水量(排水トン数), ~(4)のようになる.これらの回帰式は,表-2で示したト 船舶の接岸速度,仮想質量係数,偏心係数)は,互いに ン数の範囲内において適用することができる. 独立な確率変数を用いて,式(36)~式(39)のように表現す ることができる.これらの式中の DWT (orGT ) とは,船 表-4 パラメータの従う確率分布 パラメータ 船舶の満載時の排水量 船舶の接岸速度 仮想質量係数 偏心係数 種によって,載荷重量トン数(DWT)あるいは総トン数 (GT)のいずれかを使用することを意味する.また,こ れらの式中の P は,各パラメータの回帰式周りの確率分 布を表している. ①船舶の満載時の排水量(排水トン数) DT = a DT ⋅ DWT (orGT ) + PDT (船舶の満載時の排水量(排水トン数) ) (36) (37) ③仮想質量係数 C m = aCm ⋅ DWT (orGT ) + PCm (38) ④偏心係数 C e = aCe ⋅ DWT (orGT ) + PCe PDT PVb PCm PCe 表-5(1) 回帰式および確率分布の値 ②船舶の接岸速度 Vb = PVb ⋅ DWT (orGT )−0.338 確率分布 正規分布 対数正規分布 正規分布 正規分布 船種 単位 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー DWT DWT DWT GT GT GT GT GT GT GT 傾き 平均値 µ 標準偏差 a DT 1.139 1.344 1.138 0.880 0.652 1.114 1.015 0.522 1.052 1.150 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.052DWT 0.060DWT 0.145DWT 0.211GT 0.147GT 0.425GT 0.154GT 0.076GT 0.337GT 0.135GT σ 表-5(2) 回帰式および確率分布の値(船舶の接岸速度) 船種 (39) 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー ここに, DT :船舶の満載時の排水量(排水トン数)(t) Vb :船舶の接岸速度(m/s) C m :仮想質量係数 C e :偏心係数 DWT :船舶の載荷重量トン数(t) GT :船舶の総トン数(t) -15- 単位 DWT DWT DWT GT GT GT GT GT GT GT 平均値 標準偏差 2.040 1.929 2.041 2.226 2.463 2.055 2.121 2.656 2.095 2.034 0.714 0.675 0.714 0.779 0.862 0.719 0.743 0.930 0.733 0.712 µ σ しかしながら,これらの回帰式を用いると,船舶の排 表-5(3) 回帰式および確率分布の値(仮想質量係数) 船種 傾き 単位 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー DWT DWT DWT GT GT GT GT GT GT GT 平均値 µ aCm -3.403×10-7 7.648×10-7 2.276×10-7 1.327×10-7 2.014×10-6 -3.657×10-6 -1.667×10-6 -7.436×10-7 4.168×10-7 -4.995×10-6 標準偏差 水量の標準偏差を船種ごとに一定値としている関係で, σ 1.776 1.850 1.635 1.706 1.706 1.869 1.736 1.692 1.745 1.839 載荷重量トン数(DWT)または総トン数(GT)が小さい 0.105 0.085 0.066 0.145 0.099 0.129 0.055 0.079 0.101 0.088 場合に船舶の排水量の変動係数が非常に大きくなる.こ のため,この場合の船舶の排水量に対する部分係数を計 算すると非常に大きな数値になる.例えば,貨物船の場 合,載荷重量トン数(DWT)が1,000tの場合は,船舶の排 水量の変動係数が1.96( = σ µ =2,234/(1.139×1,000))と なる.ここで, µ は平均値, σ は標準偏差である. そこで,本研究では,段階的なトン数(載荷重量トン 数(DWT)または総トン数(GT))における船舶の排水 量の変動係数を求め,これらの重み付け加重平均を船種 表-5(4) 回帰式および確率分布の値(偏心係数) 船種 傾き 単位 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー DWT DWT DWT GT GT GT GT GT GT GT aCe 平均値 µ -7 1.840×10 -1.737×10-7 -2.577×10-9 2.265×10-7 -6.356×10-8 6.040×10-7 2.029×10-8 2.520×10-7 -1.513×10-6 -1.876×10-7 0.616 0.580 0.631 0.570 0.546 0.592 0.591 0.537 0.531 0.512 ごとの一定値の変動係数として採用することとした.例 標準偏差 σ えば,貨物船の場合については,船舶の排水量の変動係 0.023 0.017 0.012 0.037 0.026 0.021 0.015 0.023 0.019 0.014 数は0.045となる.この変動係数から逆算して,段階的な トン数(載荷重量トン数(DWT)または総トン数(GT)) における船舶の排水量の標準偏差を設定する.すなわち, 現状では船種ごとに一定値となっている標準偏差が,載 荷重量トン数(DWT)または総トン数(GT))に対して 変化することになる. 表-7に,本研究で採用した載荷重量トン数(DWT)ま たは総トン数(GT)と船舶の満載時の排水量(排水トン 数(DT))の回帰式を示す.また,図-5は,貨物船の場合 以下では,表-4および表-5(1)~(4)で示した各パラメ の船舶の満載時の排水量(排水トン数)の回帰式および ータ(船舶の満載時の排水量(排水トン数) ,船舶の接岸 標準偏差のグラフを示す.なお,全ての船種の満載時の 速度,仮想質量係数,偏心係数)の船舶の載荷重量トン 排水量(排水トン数)の回帰式および標準偏差のグラフ 数(DWT)あるいは総トン数(GT)に対する回帰式の算 は付録Aに掲載する. 定方法について説明する. 表-7 載荷重量トン数(DWT)または総トン数(GT) (2) 船舶の満載時の排水量(排水トン数) と船舶の満載時の排水量の回帰式(本研究) 表-6は,高橋ら(2006)が提示している載荷重量トン 船種 数(DWT)または総トン数(GT)と船舶の満載時の排水 貨物船 量(排水トン数(DT))の回帰式を示している. コンテナ船 タンカー RORO船 表-6 載荷重量トン数(DWT)または総トン数(GT) PCC船 と船舶の満載時の排水量の回帰式(高橋ら,2006) 船種 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー 回帰式 DT DT DT DT DT DT DT DT DT DT = 1.139DWT = 1.344DWT = 1.138DWT = 0.880GT = 0.652GT = 1.114GT = 1.015GT = 0.522GT = 1.052GT = 1.150GT LPG船 標準偏差 LNG船 2,234 2,668 8,743 4,863 3,565 10,199 8,641 2,745 1,688 1,716 旅客船 中短距離フェリー 長距離フェリー -16- 回帰式 DT DT DT DT DT DT DT DT DT DT = 1.139DWT = 1.344DWT = 1.138DWT = 0.880GT = 0.652GT = 1.114GT = 1.015GT = 0.522GT = 1.052GT = 1.150GT 標準偏差 0.052DWT 0.060DWT 0.145DWT 0.211GT 0.147GT 0.425GT 0.154GT 0.076GT 0.337GT 0.135GT この船舶の載荷重量トン数(DWT)と接岸速度の関係 200,000 は,次式のような回帰式で表される. 貨物船 180,000 排水量(排水トン数)(t) 160,000 Vb = PVb ⋅ DWT −0.338 140,000 (40) 120,000 100,000 この式において,接岸速度の確率分布 PVb は,平均値 80,000 2.040,標準偏差0.714(すなわち, PVb (µ ,σ ) = PVb (2.040, 0.714))の対数正規分布に従う.ここで, µ は平均値, σ 60,000 40,000 平均値 20,000 平均値+標準偏差 は標準偏差である.上田ら(2000) ,Ueda et al.(2002a, 2002b)および平野(2002)において提案されている船舶 0 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT) の接岸速度の回帰式は,貨物船,コンテナ船および自動 車運搬船に関する統計データ(守屋ら,1991)を基に算 図-5 船舶の満載時の排水量(排水トン数)の 定したものである.本研究では,船種ごとの船舶の接岸 回帰式および標準偏差(貨物船) 速度に関する十分な統計データがないことから,この船 舶の接岸速度の回帰式を貨物船の接岸速度の回帰式と仮 (3) 船舶の接岸速度 定して用いた.貨物船以外の船種については,表-6ある 船舶の接岸速度については,対象船舶の船型,載荷状 いは表-7に示した載荷重量トン数(DWT)または総トン 態,係留施設の構造,気象・海象状況,タグボートの有 数(GT)と船舶の満載時の排水量(排水トン数(DT)) 無等の様々な要因が影響する.このため,その確率分布 の平均的な関係を利用して,貨物船の接岸速度の回帰式 は既往の実測資料に基づいた統計解析により算定する必 を変換して用いることとした. 要がある.本研究では,船舶の接岸速度については,守 表-6または表-7によると,貨物船の載荷重量トン数 屋ら(1991)の横浜港における調査結果を利用して,上 (DWT)と満載時の排水量(排水トン数(DT))の平均 田ら(2000),Ueda et al.(2002a,2002b)および平野(2002) 的な関係は,次式となる. が提案している回帰式を適用している. DT = 1.139DWT 図-6は,船舶の載荷重量トン数と接岸速度の関係を示 (41) したものである(上田ら,2000).この図から,船舶の載 荷重量トン数が大きくなるほど,その接岸速度が小さく この関係を用いて,船舶の接岸速度は,船舶の満載時 なる傾向が理解できる. の排水量(排水トン数(DT))に大きく依存していると仮 定し,式(40)を排水トン数(DT)の関数に書き直すと, 次式のようになる. ⎛ DT ⎞−0.338 Vb = PVb ⋅ ⎜ ⎟ ⎝ 1.139 ⎠ (42) 例えば,コンテナ船の場合,表-6または表-7によると, コンテナ船の載荷重量トン数(DWT)と満載時の排水量 (排水トン数(DT))の平均的な関係は次式となるから, DT = 1.344DWT 図-6 船舶の載荷重量トン数と接岸速度の関係 (43) 式(42)は,次式のように変換される. (上田ら,2000) ⎛ 1.344 DWT ⎞−0.338 Vb = PVb ⋅ ⎜ = 0.946PVb ⋅ DWT −0.338 (44) ⎟ ⎝ 1.139 ⎠ -17- したがって,コンテナ船の接岸速度の確率分布 PVb とし (4) 仮想質量係数 て,0.946 PVb を PVb に改めて置き換えると,貨物船の接岸 仮想質量係数の回帰式は,現行技術基準の仮想質量係 数の算定式を用いて,統計解析により算定した. 速度の確率分布の平均値および標準偏差をそれぞれ0.946 倍することにより,コンテナ船の接岸速度の確率分布 PVb 現行技術基準によると,仮想質量係数は,次式によっ は PVb (µ ,σ ) = PVb (1.929, 0.675)となる.よって,式(44)は, て算定することができる. 最終的に次式のようになり,式(40)(あるいは式(37))と 同じ式で表される. C m = 1+ Vb = PVb ⋅ DWT −0.338 π d ⋅ 2C b B (46) (45) この式において, C b はブロック係数であり,次式で定 他の船種についても同様な手順に従って,式(37)の船舶 義される. の接岸速度の回帰式が導き出される. 表-8に,載荷重量トン数(DWT)または総トン数(GT) と船舶の接岸速度の回帰式を示す.また,図-7は,貨物 Cb = ∇ L pp Bd (47) 船の場合の船舶の接岸速度の回帰式および標準偏差のグ ラフを示す.なお,全ての船種の接岸速度の回帰式およ ここに, π :円周率 び標準偏差のグラフは付録Bに掲載する. C b :ブロック係数 ∇ :船舶の排水体積(m3) L pp :垂線間長(m) 表-8 載荷重量トン数(DWT)または総トン数(GT) と船舶の接岸速度の回帰式 船種 回帰式 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー Vb Vb Vb Vb Vb Vb Vb Vb Vb Vb 標準偏差 = 2.040DWT −0.338 = 1.929DWT −0.338 = 2.041DWT −0.338 = 2.226GT −0.338 = 2.463GT −0.338 = 2.055GT −0.338 = 2.121GT −0.338 = 2.656GT −0.338 = 2.095GT −0.338 = 2.034GT −0.338 B :型幅(m) 0.714 0.675 0.714 0.779 0.862 0.719 0.743 0.930 0.733 0.712 d :満載喫水(m) である. 船舶の排水体積 ∇ は,船舶の満載時の排水量(排水ト (t/m3) ン数) DT (t)と海水の単位体積質量 ρ (=1.03) から, ∇ = DT ρ で計算することができる. 仮想質量係数の回帰式は,最新の船舶の諸元データ (Lloyd’s Marine Intelligence Unite,2004;日本海運集会所, 2004)を用いて,個々の船舶の垂線間長 L pp ,型幅 B ,満 載喫水 d ,排水体積 ∇ から,個々の船舶に対する仮想質 量係数を計算し,統計解析により線形回帰式として求め ている. 0.30 貨物船 0.25 接岸速度(m/s) 表-9に,載荷重量トン数(DWT)または総トン数(GT) 平均値 と仮想質量係数の回帰式を示す.また,図-8は,貨物船 平均値+標準偏差 の場合の仮想質量係数の回帰式および標準偏差のグラフ 0.20 を示す.なお,全ての船種の仮想質量係数の回帰式およ び標準偏差のグラフは付録Cに掲載する. 0.15 0.10 0.05 0.00 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT) 図-7 船舶の接岸速度の回帰式および標準偏差(貨物船) -18- 表-9 載荷重量トン数(DWT)または総トン数(GT) 上式において,船舶の重心を通る鉛直軸回りの回転半 径 r は, r L pp と船舶のブロック係数 C b との関数関係か と仮想質量係数の回帰式 回帰式 標準 偏差 C m = −3.403 × 10−7 DWT + 1.776 C m = 7.648× 10−7 DWT + 1.850 C m = 2.276× 10−7 DWT + 1.635 C m = 1.327 × 10−7 GT + 1.706 C m = 2.014 × 10−6 GT + 1.706 C m = −3.657 × 10−6 GT + 1.869 C m = −1.667 × 10−6 GT + 1.736 C m = −7.436 × 10−7 GT + 1.692 C m = 4.168 × 10−7 GT + 1.745 C m = −4.995 × 10−6 GT + 1.839 0.105 0.085 0.066 0.145 0.099 0.129 0.055 0.079 0.101 0.088 船種 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー ら,次式を用いて近似的に計算できる. r = (0.19C b + 0.11)L pp 係留施設に平行に測った接触点から船舶の重心までの 距離 l は,式(50)または式(51)を用いて算定することがで きる(運輸省港湾局監修,1992).ここで,l として,k >0.5 のときは L1 を, k <0.5のときは L2 を用い, k =0.5のとき は L1 と L2 のうち,偏心係数 C e が大きくなる方の値を採 用する. 2.5 平均値 貨物船 2.4 L1 = {0.5α + e(1− k )}L pp cos θ (50) L2 = {0.5α − ek}L pp cos θ (51) 平均値+標準偏差 2.3 2.2 仮想質量係数 (49) ここに, 2.1 L1:船舶が1つの防衝工に接触するときの係留施設に平行 2.0 に測った接触点から船舶の重心までの距離(m) 1.9 L2:船舶がもう1つの防衝工に接触するときの係留施設に 1.8 平行に測った接触点から船舶の重心までの距離(m) 1.7 θ :接岸角度(°)(通常,0~10 °程度) 1.6 1.5 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT) e :船の長軸方向に測った防衝工間隔と垂線間長との比 ( e ≤ α /5~ α /6であれば,防衝工は十分密に取り付 けられている. ) 図-8 仮想質量係数の回帰式および標準偏差(貨物船) α :防衝工との接触点高さにおける船舶の側面の平行舷 (パラレルサイド)の長さと垂線間長との比(一般 に1/3~1/2) (5) 偏心係数 k :2つの防衝工の間において船舶と係船岸が最も近づく 偏心係数の回帰式は,仮想質量係数の場合と同様に, 点を表すパラメータ(0< k <1であるが,一般的には 現行技術基準の偏心係数の算定式を用いて,統計解析に k =0.5程度) より算定した. である. 現行技術基準によると,偏心係数は,次式によって算 偏心係数の回帰式は,最新の船舶の諸元データ(Lloyd’s 定することができる. Ce = 1 ⎛ l ⎞2 1+ ⎜ ⎟ ⎝r⎠ Marine Intelligence Unite,2004;日本海運集会所,2004) を用いて,個々の船舶の垂線間長 L pp ,型幅 B ,満載喫水 d ,排水体積 ∇ から,個々の船舶の偏心係数を計算し, (48) 統計解析により線形回帰式として求めている.なお,本 研究では,接岸角度 θ =5°,パラメータ k =0.5およびパラ メータ α =0.5とし,パラメータ e については,平均的な値 ここに, として e = α /5.5とした.接岸角度については, θ =0°あ l :船舶の接触点から係留施設の法線に平行に測った るいは θ =10°とした場合も検討してみたが,結果に大き 当該船舶の重心までの距離(m) な影響はないことを確認している.また,パラメータ α は, r :船舶の重心を通る鉛直軸回りの回転半径(m) 船種やブロック係数等によって異なると考えられるが, である. ここでは全ての船種について一定値とした. -19- 表-10に,載荷重量トン数(DWT)または総トン数(GT) 工の吸収エネルギーを上回る危険性の標準的な限界値, すなわち防衝工の目標破壊確率を0.01とした.この破壊確 と偏心係数の回帰式を示す.また,図-9は,貨物船の場 合の偏心係数の回帰式および標準偏差のグラフを示す. 率は,接岸する船舶100隻に1回の割合で防衝工の破壊が なお,全ての船種の偏心係数の回帰式および標準偏差の 発生することを意味している.しかしながら,大型港湾 グラフは付録Dに掲載する. におけるコンテナ船等は年間数百回も接岸する場合があ り,また危険物を取り扱うバースではその施設の重要性 表-10 載荷重量トン数(DWT)または総トン数(GT) は高いことから,より正確には,対象船舶の年間の接岸 と偏心係数の回帰式 船種 回数や対象施設の重要性を考慮して破壊確率を設定する 標準 偏差 回帰式 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー Ce Ce Ce Ce Ce Ce Ce Ce Ce Ce = 1.840 × 10−7 DWT + 0.616 = −1.737 × 10−7 DWT + 0.580 = −2.577× 10−9 DWT + 0.631 = 2.265 × 10−7 GT + 0.570 = −6.356 × 10−8 GT + 0.546 = 6.040 × 10−7 GT + 0.592 = 2.029 × 10−8 GT + 0.591 = 2.520 × 10−7 GT + 0.537 = −1.513 × 10−6 GT + 0.531 = −1.876 × 10−7 GT + 0.512 必要がある. 長尾ら(2003)は,信頼性設計法の適用においては, 0.023 0.017 0.012 0.037 0.026 0.021 0.015 0.023 0.019 0.014 目標となる安全性水準を現行設計法の平均的な安全性水 準とする必要があるが,そのためには,防衝工を設計す る際に用いる船舶の接岸エネルギーおよび防衝工の吸収 エネルギーの算定式の各パラメータの信頼度に関するデ ータを収集する必要があるとしている.そして,このよ うなデータを収集することは実際には困難であることか ら,各パラメータに対して適当な信頼度を複数設定して, これらの信頼度の組み合わせが等しい確率で用いられて いると仮定することで,目標となる安全性水準を設定し ている.しかしながら,この方法では,目標信頼性指標 (すなわち目標破壊確率)が船種・船型によって異なる 0.80 平均値 貨物船 0.75 値となるため,船種・船型に関わらず一定した目標安全 平均値+標準偏差 性水準を設定する方が設計上は合理的であると考えられ 0.70 る.そこで,本研究では,防衝工の信頼性設計における 偏心係数 0.65 目標安全性水準として,船種・船型に関わらず,一定値 0.60 の目標破壊確率0.01を採用した. 0.55 この防衝工の目標破壊確率は,船舶の接岸エネルギー 0.50 に関するパラメータ(船舶の質量(満載時の排水量) ,船 0.45 舶の接岸速度,仮想質量係数,偏心係数)の信頼度を全 0.40 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT) て95%として,船種・船型ごとに設計した防衝工に対し, 1次信頼性理論(FORM)による信頼性解析を用いて算定 した防衝工の破壊確率を基準に設定したものである.図 図-9 偏心係数の回帰式および標準偏差(貨物船) -10は,船舶の接岸エネルギーに関する各パラメータの信 頼度を95%として設計した防衝工の破壊確率を船種別に 示したものである.防衝工の破壊確率の算定結果から, 4.4 防衝工の規格値の設定 各船種において船型ごとの破壊確率はおおむね一定値と (1) 目標破壊確率 なったため,この図には,船種ごとの防衝工の破壊確率 防衝工の性能関数を対象とした1次信頼性理論 の平均値を示している.図-10を見ると,防衝工の破壊確 (FORM)による信頼性解析を適用して,目標破壊確率を 率の最小値はRORO船およびLPG船の場合の0.010であり, 満足する防衝工の規格値を船種・船型ごとに算定する. 防衝工の破壊確率の最大値はコンテナ船の場合の0.028で 信頼性解析では,1次信頼性理論(FORM)によって対象 あることがわかる.すなわち,防衝工の破壊確率は船種 構造物の信頼性指標を求めることができる信頼性解析プ ごとに異なっており,0.010~0.028の範囲にある.このこ ログラムを用いた.なお,信頼性解析においては,信頼 とから,船種・船型に関わらず一定した目標安全性水準 性指標が算出されると同時に破壊確率および感度係数も を設定する方針により,防衝工の破壊確率の最小値であ 算出される.本研究では,船舶の接岸エネルギーが防衝 る0.01を目標破壊確率とした. -20- 船種別に示したものである.各パラメータの信頼度の算 定結果から,各船種において船型ごとの信頼度はおおむ 0.030 ね一定値となったことから,この図には,船種ごとの各 0.028 0.025 0.025 パラメータの信頼度の平均値を示している.図-11を見る 0.021 破壊確率 0.020 と,各パラメータの信頼度の最小値はLPG船の場合の 0.020 0.020 94.9%であり,各パラメータの信頼度の最大値はコンテナ 0.017 0.015 船の場合の97.7%であることがわかる.各パラメータの信 0.013 0.011 0.010 0.010 頼度についても,防衝工の破壊確率の場合と同様に船種 0.010 ごとに異なっており,94.9%~97.7%の範囲にある.した 0.005 がって,設計した防衝工の破壊確率が0.01となるような船 ー ー おおむね95%~98%程度であると言える. フ フ 長 距 離 離 距 短 中 舶の接岸エネルギーに関する各パラメータの信頼度は, ェ リ 客 ェ リ 船 船 旅 船 LN G 船 C LP G PC 貨 物 船 コ ン テ ナ 船 タ ン カ ー R O R O 船 0.000 (2) 防衝工の規格値 防衝工の規格値の設定では,防衝工の性能関数を対象 図-10 とした1次信頼性理論(FORM)による信頼性解析におい 船種別の防衝工の破壊確率 て,防衝工の規格値を適当な初期値から0.1ずつ増加させ (接岸エネルギーの各パラメータの信頼度:95%) ることにより,目標破壊確率0.01を満足する防衝工の規格 値および感度係数の値を船種・船型ごとに算定する.図 -12は,貨物船の場合について,この防衝工の規格値の算 100.0 定方法を7種類の船型に対して示したものである. 99.0 表-11は,貨物船の場合について防衝工の規格値および 98.0 感度係数の値の算定結果を示す.当然のことながら,船 97.1 97.0 96.9 96.0 95.7 95.0 95.0 96.9 型の大きな大型船舶になるほど,防衝工の規格値は大き 96.5 くなっている.また,感度係数の絶対値の大きいパラメ 95.3 94.9 ータほど船舶の接岸エネルギーの設計値への影響が大き コ 図-11 LN G LP G PC C 船 防衝工の規格値および感度係数の値の算定結果は付録E 旅 中 客 短 船 距 離 フ ェ 長 リ ー 距 離 フ ェ リ ー ータであることがわかる.なお,全ての船種についての 92.0 船 いが,表-11から,船舶の接岸速度が最も支配的なパラメ 93.0 船 94.0 貨 物 船 ン テ ナ 船 タ ン カ ー R O R O 船 信頼度(%) 97.5 97.7 に掲載する. 0.030 船種別の接岸エネルギーの各パラメータ 貨物船 の信頼度(防衝工の破壊確率:0.01) 0.025 一方,設計した防衝工の破壊確率が0.01となるような船 載時の排水量) ,船舶の接岸速度,仮想質量係数,偏心係 0.020 破壊確率 舶の接岸エネルギーに関するパラメータ(船舶の質量(満 1,000DWT 5,000DWT 10,000DWT 30,000DWT 70,000DWT 120,000DWT 150,000DWT 0.015 249.6 数)の信頼度について,各パラメータの信頼度が全て同 357.0 608.5 0.010 118.2 じ値であると仮定して検討を行った.このとき,1次信 199.2 564.5 471.8 0.005 頼性理論(FORM)による信頼性解析を用いて,各パラメ ータの信頼度を0.1ずつパラメトリックに変化させて防衝 0.000 0 工の試設計を行い,防衝工の破壊確率0.01を満足する場合 100 200 300 400 防衝工の規格値(kNm) 500 600 の各パラメータの信頼度を船種・船型ごとに算定した. 図-11は,設計した防衝工の破壊確率が0.01になる場合の 図-12 船舶の接岸エネルギーに関する各パラメータの信頼度を -21- 防衝工の規格値の算定方法(貨物船) 700 表-11 ケース 1 2 3 4 5 6 7 8 9 10 11 12 13 14 防衝工の規格値の算定結果(貨物船) 載荷重量トン 破壊確率 信頼性指標 防衝工規格値 Pf β DWT Ecat(kNm) DT 1,000 0.01 2.33 118.2 -0.066 2,000 0.01 2.33 148.0 -0.066 3,000 0.01 2.33 168.8 -0.066 5,000 0.01 2.33 199.2 -0.066 10,000 0.01 2.33 249.6 -0.066 12,000 0.01 2.33 264.8 -0.066 18,000 0.01 2.33 302.2 -0.066 30,000 0.01 2.33 357.0 -0.066 40,000 0.01 2.33 392.3 -0.066 55,000 0.01 2.33 435.6 -0.066 70,000 0.01 2.33 471.8 -0.066 90,000 0.01 2.33 512.8 -0.066 120,000 0.01 2.33 564.5 -0.066 150,000 0.01 2.33 608.5 -0.066 4.5 目標信頼性指標の算定 感度係数 α Vb Cm -0.993 -0.085 -0.993 -0.085 -0.993 -0.085 -0.993 -0.085 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.087 -0.993 -0.087 -0.993 -0.088 Ce -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.052 -0.052 -0.052 -0.051 -0.051 である. 目標信頼性指標の算定では,防衝工の規格値を設定し また,各パラメータの設計用値は,式(31)~式(34)のよ た際に算定された感度係数の値を固定して,目標信頼性 うに部分係数および特性値を用いて定義される. 指標の値を初期値からパラメトリックに変化させてレベ ここで用いる特性値は,現行設計法で用いられてきた ル1信頼性設計法による防衝工の試設計を船種・船型ご 値を設定する必要があるが,現行設計法における各パラ とに実施する.すなわち,目標信頼性指標の値を初期値 メータの信頼度に関する情報が不十分であることから, 2.000から0.001ずつ増加させ,目標信頼性指標が4.000にな ここでは,特性値として平均値を採用した.したがって, るまで,各目標信頼性指標の値を用いてレベル1信頼性 部分係数の計算式は,式(53)のように簡単な式となる. 設計法による防衝工の試設計を行う.これらの防衝工の γ X = 1 − βT α X VX 試設計の結果から,防衝工の設計値が設定した防衝工の (53) 規格値と最も近くなる場合を目標信頼性指標の最適値と する. 本研究で提示している部分係数は,平均値を特性値と レベル1信頼性設計法による防衝工の試設計では,式 した場合のものであるから,各パラメータの信頼度に対 (35)に示した防衝工の性能照査式を用いる.船舶の接岸エ する特性値を用いて防衝工の信頼性設計を行う場合は, ネルギーに関するパラメータ(船舶の質量(満載時の排 部分係数を µ X X k 倍する必要がある. 水量),船舶の接岸速度,仮想質量係数,偏心係数)の部 さて,信頼性指標と破壊確率の関係は,式(11)あるいは 分係数の計算式は,式(26)のように設計点の値と確率変数 式(12)のように標準正規確率分布関数で一意的に決定で の特性値との比ではなく,簡易的な次式を用いることと きる.したがって,防衝工の目標破壊確率0.01に対応する した(長尾ら,2003) . 目標信頼性指標の値は,約2.33となるはずである.ただし, 本研究では,部分係数を計算する際の感度係数の値を船 γ X = (1− βT α X VX ) µX Xk 種・船型ごとに一定値に固定し,式(52)に示した簡易的な (52) 部分係数の計算式を用いていることから,防衝工の規格 値と一致するような防衝工の設計値が計算される目標信 ここに, 頼性指標の最適値は,2.33よりも大きくなる.これは,式 X :パラメータ(確率変数) γ X :パラメータ X に対する部分係数 (52)の部分係数の計算式において,非正規確率変数を正規 βT :目標信頼性指標 α X :パラメータ X に対する感度係数 いないことに原因がある.しかしながら,あるパラメー VX :パラメータ X の変動係数 確率変数を正規化したときの確率分布の平均値および標 µ X :パラメータ X の平均値 準偏差を算定することは,実務上容易ではない.そこで, X k :パラメータ X の特性値 本研究では,式(52)のような簡易的な部分係数の計算式を 化したときの確率分布の平均値および標準偏差を用いて タの確率分布が正規分布に従わない場合に,その非正規 -22- 採用することとした. 4.6 部分係数の算定 図-13は,貨物船の場合について,目標信頼性指標の最 船舶の接岸エネルギーに関するパラメータ(船舶の質 適値の算定方法を7種類の船型に対して示したものであ 量(満載時の排水量),船舶の接岸速度,仮想質量係数, る.貨物船の場合については,船型の大きさに関わらず, 偏心係数)の部分係数は,式(53)に示した部分係数の算定 目標信頼性指標の最適値は3.06の一定値になることがわ 式を用いて船種・船型ごとに算定する.このとき,各パ かる.なお,全ての船種についての目標信頼性指標の最 ラメータの確率分布,防衝工の規格値を設定した際の感 適値の算定結果は,部分係数の算定結果とともに付録F 度係数の値および目標信頼性指標の最適値を用いて,船 に載せている.船種別の目標信頼性指標の最適値の算定 種・船型ごとに部分係数を計算する. 結果によると,他の船種についても,船型の大きさに関 表-12は,貨物船の場合について目標信頼性指標の最適 わらず,目標信頼性指標の最適値はおおむね一定値にな 値に対する部分係数の算定結果を示す.貨物船の場合に っている.全ての船種に対して見ても,目標信頼性指標 ついては,船型の大きさに関わらず,各パラメータに対 の最適値は2.79~3.07の範囲にあり,おおむね同じような する部分係数は一定値になることがわかる.これは,感 値となった. 度係数の値が船型の大きさに関わらずほぼ一定値である ことと,仮想質量係数および偏心係数の変動係数も船型 の大きさに関わらずほぼ一定値であることが理由である. 250 船舶の質量(満載時の排水量) ,船舶の接岸速度,仮想質 貨物船 200 量係数および偏心係数に対する部分係数は,それぞれ1.01, 防衝工の規格値と設計値の差(kNm) 150 2.06,1.02および1.01である.なお,全ての船種について 100 3.06 の目標信頼性指標の最適値に対する部分係数の算定結果 50 は付録Fに掲載する.船種別の部分係数の算定結果によ 0 2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4 ると,他の船種についても,船型の大きさに関わらず, -50 -100 -150 -200 各パラメータに対する部分係数はおおむね一定値になっ 1,000DWT 5,000DWT 10,000DWT 30,000DWT 70,000DWT 120,000DWT 150,000DWT ている. -250 目標信頼性指標 図-13 目標信頼性指標の最適値の算定方法(貨物船) 表-12 ケース 1 2 3 4 5 6 7 8 9 10 11 12 13 14 部分係数の算定結果(貨物船) 載荷重量トン 目標信頼性指標 DWT βT 1,000 3.06 2,000 3.06 3,000 3.06 5,000 3.06 10,000 3.06 12,000 3.06 18,000 3.06 30,000 3.06 40,000 3.06 55,000 3.06 70,000 3.06 90,000 3.06 120,000 3.06 150,000 3.06 DT 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 -23- 部分係数 γ Vb Cm 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 Ce 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 防衝工設計値 Ecat(kNm) 118.2 148.0 168.8 199.2 249.6 264.8 302.2 357.0 392.3 435.7 471.8 512.8 564.5 608.6 表-13は,船種別の目標信頼性指標の最適値に対する部 1.00~1.02の範囲にある.すなわち,船舶の接岸速度に対 分係数の算定結果を示す.また,図-14は,船種別の部分 する部分係数は2.0程度,船舶の質量(満載時の排水量) 係数の値および目標信頼性指標の最適値をグラフとして に対する部分係数は1.0~1.4程度,仮想質量係数および偏 示したものである.ここでは,各船種において,船型ご 心係数に対する部分係数は1.0程度となった. との部分係数の値および目標信頼性指標の最適値はそれ 図-15は,本研究で算定した部分係数の値を用いて,レ ぞれほぼ一定値となったことから,船種ごとに部分係数 ベル1信頼性設計法により船種・船型ごとに防衝工の設計 の値および目標信頼性指標の最適値を平均している. 値を計算した結果を示したものである.この図を見ると, 表-13および図-14によると,船種ごとに多少の相違は 旅客船に対する防衝工の設計値は比較的小さい傾向にあ あるが,部分係数はパラメータ(船舶の質量(満載時の り,LPG船に対する防衝工の設計値は比較的大きい傾向に 排水量),船舶の接岸速度,仮想質量係数,偏心係数)ご あることがわかる.全ての船種に対する防衝工の設計値 とにおおむね一定値となった.また,LPG船あるいは中短 については,船種ごとに多少の相違はあるものの,おお 距離フェリーの場合のように目標信頼性指標の最適値が むね同等な値となっている. 小さいときには,船舶の接岸速度に対する部分係数は小 本研究では,表-13および図-14に示した船種別の目標 さくなり,船舶の質量(満載時の排水量)に対する部分 信頼性指標の最適値に対する部分係数の値を防衝工のレ 係数は大きくなることがわかった.船舶の質量(満載時 ベル1信頼性設計法における部分係数の標準値として提 の排水量)に対する部分係数は1.01~1.41,船舶の接岸速 案する.なお,全ての船種についての部分係数の標準値 度に対する部分係数は1.90~2.07,仮想質量係数に対する の詳細については付録Gに掲載する. 部分係数は1.00~1.03,また偏心係数に対する部分係数は 表-13 船種別の部分係数の算定結果 船種 目標信頼性指標 βT 貨物船 コンテナ船 タンカー RORO船 PCC船 LPG船 LNG船 旅客船 中短距離フェリー 長距離フェリー 3.06 3.07 3.01 2.88 2.91 2.80 2.99 2.99 2.84 3.02 DT 1.01 1.01 1.07 1.20 1.18 1.41 1.09 1.09 1.32 1.06 部分係数 γ Vb Cm 2.06 1.02 2.07 1.01 2.04 1.01 1.95 1.03 1.97 1.01 1.90 1.02 2.02 1.00 2.02 1.01 1.93 1.01 2.04 1.01 Ce 1.01 1.00 1.00 1.02 1.01 1.00 1.00 1.01 1.01 1.00 3.5 3.0 目標信頼性指標 2.5 部分係数(排水量) 2.0 部分係数(接岸速度) 部分係数(仮想質量係数) 1.5 部分係数(偏心係数) 1.0 0.5 船 旅 客 船 距 離 フ ェ リ 長 ー 距 離 フ ェ リ ー 船 中 短 LN G 船 C LP G 船 PC R O カ ー O R タ ン ナ 船 ン テ コ 貨 物 船 0.0 図-14 船種別の部分係数の値および目標信頼性指標の最適値 -24- 700.0 600.0 貨物船 コンテナ船 防衝工の設計値(kNm) 500.0 タンカー RORO船 400.0 PCC船 LPG船 300.0 LNG船 旅客船 200.0 中短距離フェリー 長距離フェリー 100.0 0.0 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT)または総トン数(GT) 図-15 船種・船型別の防衝工の設計値 5.結論 値および感度係数の値を船種・船型ごとに算定した.そ の算定結果によると,大型船舶になるほど,防衝工の規 本研究では,防衝工のレベル1信頼性設計法において, 格値は大きくなることがわかった.また,感度係数の絶 船種に対応した防衝工の性能照査式の部分係数の標準値 対値の大きさから,船舶の接岸速度が船舶の接岸エネル を提案した. ギーの設計値に対する最も支配的なパラメータであるこ とがわかった. 本研究の成果を以下のとおり取りまとめる. (1) 部分係数の検討は,貨物船,コンテナ船,タンカー, (5) 目標信頼性指標の算定では,船種・船型ごとに感度係 ロールオン・ロールオフ(RORO)船,自動車専用(PCC) 数の値を固定して,目標信頼性指標の値を初期値からパ 船,LPG船,LNG船,旅客船,中短距離フェリー(航海 ラメトリックに変化させてレベル1信頼性設計法による 距離300km未満)および長距離フェリー(航海距離300km 防衝工の試設計を実施し,防衝工の設計値が設定した防 以上)の10種類の船種について,船種・船型ごとに合計 衝工の規格値と最も近くなる場合を目標信頼性指標の最 79ケースを実施した. 適値とした.その算定結果から,各船種については,船 (2) 防衝工の性能関数における船舶の接岸エネルギーに 型の大きさに関わらず目標信頼性指標の最適値はおおむ 関するパラメータ(船舶の質量(満載時の排水量) ,船舶 ね一定値となり,全ての船種に対する目標信頼性指標の の接岸速度,仮想質量係数,偏心係数)は,船舶の載荷 最適値は2.79~3.07のおおむね同じような値となった. 重量トン数(DWT)あるいは総トン数(GT)に対する回 (6) 船舶の接岸エネルギーに関するパラメータ(船舶の質 帰式として設定した.船舶の質量(満載時の排水量) ,仮 量(満載時の排水量),船舶の接岸速度,仮想質量係数, 想質量係数,偏心係数の回帰式は線形回帰式とし,船舶 偏心係数)の部分係数は,各パラメータの確率分布およ の接岸速度の回帰式は指数関数による非線形回帰式とし び目標信頼性指標の最適値を用いて船種・船型ごとに算 た. 定した.その算定結果によると,各船種については,船 (3) 防衝工の目標破壊確率は,船種・船型に関わらず,0.01 型の大きさに関わらず各パラメータに対する部分係数の の一定値とした.この目標破壊確率は,船舶の接岸エネ 値はおおむね一定値になり,船種ごとの部分係数の平均 ルギーに関する各パラメータの信頼度を全て95%として, 値を各パラメータに対する部分係数の標準値とした.船 船種・船型ごとに設計した防衝工に対し,1次信頼性理 舶の質量(満載時の排水量)に対する部分係数は1.01~ 論(FORM)による信頼性解析を用いて算定した防衝工の 1.41,船舶の接岸速度に対する部分係数は1.90~2.07,仮 破壊確率の最小値を基準に設定したものである. 想質量係数に対する部分係数は1.00~1.03,また偏心係数 (4) 防衝工の規格値の設定では,防衝工の性能関数を対象 に対する部分係数は1.00~1.02である. とした1次信頼性理論(FORM)による信頼性解析を適用 して,防衝工の目標破壊確率0.01を満足する防衝工の規格 -25- 6.おわりに (案)−,国土技術政策総合研究所研究報告,No.28, 125p. 長尚(1993) :基礎知識としての構造信頼性設計,山海堂, 本研究は,現行の防衝工の設計法にレベル1信頼性設 255p. 計法を導入するために,船種に対応した防衝工の性能照 査式の部分係数について検討し,それらの標準値を提案 P.トフ−クリステンセン・M.J.ベイカー・室津義定 したものである.本研究では,最新の船舶の諸元データ (1986):構造信頼性ー理論と応用,シュプリンガ を用いて,新たに規定された船種ごとに防衝工のレベル ー・フェアラーク東京,276p. 1信頼性設計法における部分係数を提案しているが,防 長尾毅(2002):港湾構造物の技術基準の改訂動向,第5 衝工の性能特性(製造上の誤差(公差),温度特性,速度 回鋼構造と橋に関するシンポジウム論文報告集,土 特性)などは確率分布を有するパラメータとして考慮し 木学会鋼構造委員会,pp.9-20. ていないため,今後さらに検討する必要がある. 長尾毅・岡田達彦・岩田直樹・松本英雄・石田誠・佐藤 (2005年11月16日受付) 祐司(2003) :係留施設の船舶接岸時の性能設計法に 関する基礎的研究,国土技術政策総合研究所資料, No.63,31p. 謝辞 本研究を進めるに当たって,鳥取大学の上田茂教授か 日本海運集会所(2004):日本船舶明細書(2004年版). らは,防衝工の性能照査式における各パラメータ(船舶 平野敏彦(2002) :設計諸元の統計的性質を考慮した船舶 の質量(満載時の排水量),船舶の接岸速度,仮想質量係 接岸用防舷材の設計に関する研究,鳥取大学修士論 数,偏心係数)の回帰式や防衝工設計法における目標信 文. 頼性指標の設定方法等について御指導して頂いた.また, 国土交通省国土技術政策総合研究所港湾研究部港湾施設 星谷勝・石井清(1986) :構造物の信頼性設計法,鹿島出 版会,216p. 研究室の長尾毅室長,小澤敬二主任研究官および川名太 守屋義一・吉田行秀・伊勢博・宮崎和行・杉浦淳(1991): 研究官には,防衝工の信頼性設計法における部分係数の 船舶の接岸速度に関する現地調査,海岸工学論文集, 算定方針についての情報提供および御助言を頂いている. 第38巻,pp.751-755. 以上の方々に,ここに記して深甚なる謝意を表する次第 吉岡健・長尾毅(2005) :重力式防波堤の外的安定に関す である. るレベル1信頼性設計法の提案,国土技術政策総合研 究所研究報告,No.20,38p. 参考文献 米山治男・白石悟(2004) :信頼性解析に基づいた防衝工 伊藤學・亀田弘行・黒田勝彦・藤野陽三(1988) :土木・ および係船柱の安全性評価に関する検討,港湾空港 建築のための確率・統計の応用,丸善,pp.357-467. 技術研究所資料,No.1089,86p. 上田茂・梅村亮・白石悟・山本修司・赤倉康寛・山瀬晴 Haldar, A. and Mahadevan, S. (2000) : Probability, Reliability, 義(2000) :統計的手法による船舶接岸用防舷材の設 and Statistical Methods in Engineering Design, John 計に関する研究,海岸工学論文集,第47巻,pp.866-870. Wiley & Sons, Inc., New York, 304p. Lloyd’s Marine Intelligence Unite (2004) : LMIU Shipping 運輸省港湾局監修(1992) :港湾構造物の設計計算例(第 Data (2004.1). 一集) ,日本港湾協会,pp.117-119. PIANC (2002) : Guidelines for the Design of Fender Systems : 運輸省港湾局監修(1999) :港湾の施設の技術上の基準・ 同解説,日本港湾協会,下巻,pp.825-832,pp.1080-1088. 2002, Report of WG 33 of PIANC, 70p. Ueda, S., Hirano, T., Shiraishi, S., Yamamoto, S. and Yamase, 国際航路協会(PIANC)(2005):防舷材システム設計の S. (2002a) : Statistical Design of Fender for Berthing Ship, 指針:2002版,海港委員会第33作業部会報告書. 国土交通省(2002) :土木・建築にかかる設計の基本,31p. Proc. of the 12th International Offshore and Polar 白石悟・上田茂(1987) :港湾構造物及び海洋構造物の安 Engineering Conference, ISOPE, pp.545-551. 全性照査に関する検討− 作用荷重の変動係数と荷重 Ueda, S., Hirano, T., Shiraishi, S., Yamamoto, S. and Yamase, 係数の算定,港湾技術研究所報告,第26巻第2号, S. (2002b) : Reliability Design Method of Fender for pp.493-576. Berthing Ship, Proc. of the 30th International Navigation Congress, PIANC, pp.692-707. 高橋宏直・後藤文子・安部智久(2006) :統計解析による 船舶諸元に関する研究−船舶の主要諸元の計画基準 -26- 記号表 M d :船舶の質量の設計用値(t) a DT :船舶の質量(排水トン数)の回帰式の傾き aCm :仮想質量係数の回帰式の傾き n :荷重の数 PCe :偏心係数の回帰式周りの確率分布 aCe :偏心係数の回帰式の傾き PCm :仮想質量係数の回帰式周りの確率分布 B :型幅(m) C b :ブロック係数 PDT :船舶の満載時の排水量の回帰式周りの確率分布 Pf :破壊確率 C c :バースの形状係数 PfT :目標破壊確率 C e :偏心係数 C ed :偏心係数の設計用値 PVb :船舶の接岸速度の回帰式周りの確率分布 PX i ( ⋅ ) :確率変数 X i の元の確率分布関数 C ek :偏心係数の特性値 pXi ( ⋅ ) :確率変数 X i の元の確率密度関数 C m :仮想質量係数 C md :仮想質量係数の設計用値 R :抵抗力 Rd :構造物の抵抗力の設計用値 C mk :仮想質量係数の特性値 Rk :構造物の抵抗力の特性値 C s :柔軟性係数 RT :温度補正係数 DT :船舶の満載時の排水量(排水トン数)(t) DT d :船舶の満載時の排水量の設計用値(t) RV :速度補正係数 r :船舶の重心を通る鉛直軸回りの回転半径(m), DT k :船舶の満載時の排水量の特性値(t) または抵抗力の変数 DWT :船舶の載荷重量トン数(t) S :荷重 Sd :荷重の設計用値 d :満載喫水(m),または設計用値を示す添え字 Ecat :防衝工の吸収エネルギーの規格値(kNm) Sik : i 番目の荷重の特性値 ES :防衝工の吸収エネルギー(kNm) E f :船舶の設計接岸エネルギー,または船舶の接岸エネ Sid : i 番目の荷重の設計用値 Sk :荷重の特性値 s :荷重の変数 Vb :船舶の接岸速度(m/s) ルギーの設計値(kNm) e :船の長軸方向に測った防衝工間隔と垂線間長との比 ( e ≤ α /5~ α /6) Vbd :船舶の接岸速度の設計用値(m/s) f R (r) :抵抗力の確率密度関数 Vbk :船舶の接岸速度の特性値(m/s) f S (s) :荷重の確率密度関数 f X i (x i ) :確率変数 X i ( i = 1,2, VX :パラメータ X の変動係数 , n )の確率密度関数 X :パラメータ(確率変数) f Z (z) :性能関数の確率密度関数 f R ,S (r,s) :抵抗力および荷重の同時確率密度関数 f X1 ,X2 , ,Xn (x1 , x 2 , , x n ) :確率変数 n 個の同時確率密度 X i :確率変数空間上の確率変数( i = 1,2, ,n ) X ′i :標準化空間上の標準化変数( i = 1,2, ,n ) X k :パラメータ X の特性値 x *i :(元の確率変数空間における)確率変数 X i に対する 関数 GT :船舶の総トン数(t) g(X1 , X 2 , , X n ) : n 個の確率変数で構成される性能関数 設計点 x′i x˜ i :確率変数 X i の特性値 * :標準化空間上の標準化変数 k :2つの防衝工の間において船舶と係船岸が最も近づく X ′i に対する設計点 点を表すパラメータ(0< k <1,一般的には k =0.5程度) , x * :確率変数空間上の設計点 または特性値を示す添え字 L pp :垂線間長(m) x′* :標準化空間上の設計点, ただし, x′* = ( x1′* , x′2* , , x′n* ) である. L1:船舶が1つの防衝工に接触するときの係留施設に平行 Z :性能関数 z :性能関数の変数 に測った接触点から船舶の重心までの距離(m) α :防衝工との接触点高さにおける船舶の側面の平行舷 L2:船舶がもう1つの防衝工に接触するときの係留施設に (パラレルサイド)の長さと垂線間長との比(一般 平行に測った接触点から船舶の重心までの距離(m) l :船舶の接触点から係留施設の法線に平行に測った に1/3~1/2) α 当該船舶の重心までの距離(m) M :船舶の質量(t) * :標準化空間における i i 番目の軸に対する原点と 設計点を結ぶ単位ベクトルの方向余弦,すなわち -27- 確率変数 X i に対する感度係数 α X :パラメータ X に対する感度係数 β :信頼性指標 βT :目標信頼性指標 βT ′ : γ の計算に用いる目標信頼性指標 γ :部分係数 γ Ce :偏心係数に対する部分係数 γ Cm :仮想質量係数に対する部分係数 γ DT :船舶の満載時の排水量に対する部分係数 γ f :異常接岸係数 γ g :構造物係数 γ R :抵抗力に対する部分係数 γ S :荷重に対する部分係数 γ Si :荷重 Si に対する部分係数 γ Vb :船舶の接岸速度に対する部分係数 γ X :パラメータ X に対する部分係数 γ Xi :確率変数 X i ( i = 1,2, , n )に対する部分係数 θ :接岸角度(°)(通常,0~10 °程度) µ :平均値 µ R :抵抗力 R の平均値 µ S :荷重 S の平均値 µ X :パラメータ X の平均値 µ Z :性能関数の平均値 µ XNi :確率変数 X i の元の確率分布に対応する近似 正規分布の平均値 π :円周率 ρ :海水の単位体積質量(=1.03)(t/m3) σ :標準偏差 σ R :抵抗力 R の標準偏差 σ S :荷重 S の標準偏差 σ Z :性能関数の標準偏差 σ XNi :確率変数 X i の元の確率分布に対応する近似 正規分布の標準偏差 Φ( ⋅ ) :標準正規確率分布関数 φ :防衝工の製造上の誤差(性能公差)(通常 φ =0.9) φ ( ⋅ ) :標準正規確率密度関数 ∇ :船舶の排水体積(m3) -28- 付録A 船種別の満載時の排水量(排水トン数)の回帰式および標準偏差 本文中,4.3 パラメータの確率分布の設定において説明した船種別の満載時の排水量(排水トン数)の回帰式および標準 偏差のグラフを以下に示す. 200,000 70,000 RORO船 貨物船 180,000 60,000 排水量(排水トン数)(t) 排水量(排水トン数)(t) 160,000 140,000 120,000 100,000 80,000 60,000 40,000 平均値 20,000 平均値+標準偏差 50,000 40,000 30,000 20,000 平均値 10,000 平均値+標準偏差 0 0 0 20,000 図-A.1 40,000 0 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT) 20,000 30,000 40,000 50,000 60,000 70,000 総トン数(GT) 図-A.4 満載時の排水量(排水トン数)の 満載時の排水量(排水トン数)の 回帰式および標準偏差(RORO船) 回帰式および標準偏差(貨物船) 160,000 60,000 PCC船 コンテナ船 140,000 50,000 120,000 排水量(排水トン数)(t) 排水量(排水トン数)(t) 10,000 100,000 80,000 60,000 40,000 30,000 20,000 40,000 平均値 20,000 平均値+標準偏差 0 0 0 20,000 図-A.2 40,000 60,000 80,000 載荷重量トン数(DWT) 100,000 0 120,000 図-A.5 満載時の排水量(排水トン数)の タンカー 350,000 300,000 250,000 200,000 150,000 100,000 平均値 平均値+標準偏差 50,000 0 0 50,000 100,000 150,000 200,000 250,000 300,000 350,000 載荷重量トン数(DWT) 図-A.3 20,000 30,000 40,000 50,000 60,000 70,000 満載時の排水量(排水トン数)の 回帰式および標準偏差(PCC船) 450,000 400,000 10,000 総トン数(GT) 回帰式および標準偏差(コンテナ船) 排水量(排水トン数)(t) 平均値 10,000 平均値+標準偏差 満載時の排水量(排水トン数)の 回帰式および標準偏差(タンカー) -29- 100,000 20,000 LPG船 90,000 80,000 16,000 排水量(排水トン数)(t) 排水量(排水トン数)(t) 中短距離フェリー 18,000 70,000 60,000 50,000 40,000 30,000 14,000 12,000 10,000 8,000 6,000 20,000 平均値 4,000 平均値 10,000 平均値+標準偏差 2,000 平均値+標準偏差 0 0 0 10,000 図-A.6 20,000 30,000 40,000 総トン数(GT) 50,000 60,000 70,000 0 満載時の排水量(排水トン数)の 図-A.9 回帰式および標準偏差(LPG船) 6,000 8,000 総トン数(GT) 10,000 12,000 14,000 満載時の排水量(排水トン数)の 30,000 LNG船 長距離フェリー 120,000 25,000 100,000 排水量(排水トン数)(t) 排水量(排水トン数)(t) 4,000 回帰式および標準偏差(中短距離フェリー) 140,000 80,000 60,000 40,000 平均値 20,000 20,000 15,000 10,000 平均値 5,000 平均値+標準偏差 平均値+標準偏差 0 0 0 20,000 図-A.7 40,000 60,000 80,000 総トン数(GT) 100,000 120,000 0 満載時の排水量(排水トン数)の 図-A.10 旅客船 60,000 50,000 40,000 30,000 20,000 平均値 平均値+標準偏差 0 0 20,000 40,000 60,000 80,000 100,000 120,000 総トン数(GT) 図-A.8 10,000 15,000 20,000 25,000 満載時の排水量(排水トン数)の 回帰式および標準偏差(長距離フェリー) 70,000 10,000 5,000 総トン数(GT) 回帰式および標準偏差(LNG船) 排水量(排水トン数)(t) 2,000 満載時の排水量(排水トン数)の 回帰式および標準偏差(旅客船) -30- 付録B 船種別の接岸速度の回帰式および標準偏差 本文中,4.3 パラメータの確率分布の設定において説明した船種別の接岸速度の回帰式および標準偏差のグラフを以下に 示す. 0.30 0.30 貨物船 0.25 平均値 0.25 平均値+標準偏差 0.20 接岸速度(m/s) 接岸速度(m/s) RORO船 平均値 0.15 0.10 平均値+標準偏差 0.20 0.15 0.10 0.05 0.05 0.00 0.00 0 20,000 40,000 図-B.1 60,000 80,000 100,000 120,000 140,000 160,000 載荷重量トン数(DWT) 0 接岸速度の回帰式および標準偏差 10,000 図-B.4 20,000 60,000 70,000 (RORO船) 0.30 0.30 コンテナ船 PCC船 平均値 0.25 平均値 0.25 平均値+標準偏差 0.20 接岸速度(m/s) 接岸速度(m/s) 50,000 接岸速度の回帰式および標準偏差 (貨物船) 0.15 0.10 0.05 平均値+標準偏差 0.20 0.15 0.10 0.05 0.00 0.00 0 20,000 図-B.2 40,000 60,000 80,000 載荷重量トン数(DWT) 100,000 120,000 0 接岸速度の回帰式および標準偏差 タンカー 平均値 平均値+標準偏差 0.20 0.15 0.10 0.05 0.00 0 50,000 図-B.3 100,000 20,000 30,000 40,000 総トン数(GT) 150,000 200,000 250,000 載荷重量トン数(DWT) 300,000 350,000 接岸速度の回帰式および標準偏差 (タンカー) -31- 50,000 60,000 70,000 接岸速度の回帰式および標準偏差 (PCC船) 0.30 0.25 10,000 図-B.5 (コンテナ船) 接岸速度(m/s) 30,000 40,000 総トン数(GT) 0.30 0.40 LPG船 平均値 0.25 中短距離フェリー 0.35 平均値 平均値+標準偏差 平均値+標準偏差 0.20 接岸速度(m/s) 接岸速度(m/s) 0.30 0.15 0.10 0.25 0.20 0.15 0.10 0.05 0.05 0.00 0.00 0 10,000 図-B.6 20,000 30,000 40,000 総トン数(GT) 50,000 60,000 70,000 0 接岸速度の回帰式および標準偏差 2,000 図-B.9 4,000 12,000 14,000 (中短距離フェリー) 0.30 0.30 LNG船 長距離フェリー 平均値 0.25 平均値 0.25 平均値+標準偏差 0.20 接岸速度(m/s) 接岸速度(m/s) 10,000 接岸速度の回帰式および標準偏差 (LPG船) 0.15 0.10 平均値+標準偏差 0.20 0.15 0.10 0.05 0.05 0.00 0.00 0 20,000 図-B.7 40,000 60,000 80,000 総トン数(GT) 100,000 0 120,000 接岸速度の回帰式および標準偏差 旅客船 平均値 平均値+標準偏差 0.20 0.15 0.10 0.05 0.00 0 20,000 図-B.8 40,000 10,000 15,000 総トン数(GT) 60,000 80,000 総トン数(GT) 100,000 120,000 接岸速度の回帰式および標準偏差 (旅客船) -32- 20,000 25,000 接岸速度の回帰式および標準偏差 (長距離フェリー) 0.30 0.25 5,000 図-B.10 (LNG船) 接岸速度(m/s) 6,000 8,000 総トン数(GT) 付録C 船種別の仮想質量係数の回帰式および標準偏差 本文中,4.3 パラメータの確率分布の設定において説明した船種別の仮想質量係数の回帰式および標準偏差のグラフを以 下に示す. 2.5 2.5 平均値 貨物船 2.4 2.3 平均値+標準偏差 2.3 2.2 仮想質量係数 2.2 仮想質量係数 平均値 RORO船 2.4 平均値+標準偏差 2.1 2.0 1.9 2.1 2.0 1.9 1.8 1.8 1.7 1.7 1.6 1.6 1.5 1.5 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 0 10,000 20,000 載荷重量トン数(DWT) 図-C.1 仮想質量係数の回帰式および標準偏差 図-C.4 50,000 60,000 70,000 仮想質量係数の回帰式および標準偏差 (RORO船) 2.5 2.5 平均値 コンテナ船 2.4 平均値 PCC船 2.4 平均値+標準偏差 2.3 平均値+標準偏差 2.3 2.2 仮想質量係数 2.2 仮想質量係数 40,000 総トン数(GT) (貨物船) 2.1 2.0 1.9 2.1 2.0 1.9 1.8 1.8 1.7 1.7 1.6 1.6 1.5 1.5 0 20,000 40,000 60,000 80,000 100,000 120,000 0 10,000 載荷重量トン数(DWT) 図-C.2 仮想質量係数の回帰式および標準偏差 図-C.5 平均値 タンカー 平均値+標準偏差 2.3 2.2 2.1 2.0 1.9 1.8 1.7 1.6 1.5 0 50,000 100,000 150,000 200,000 250,000 300,000 350,000 載荷重量トン数(DWT) 図-C.3 30,000 40,000 50,000 60,000 70,000 仮想質量係数の回帰式および標準偏差 (PCC船) 2.5 2.4 20,000 総トン数(GT) (コンテナ船) 仮想質量係数 30,000 仮想質量係数の回帰式および標準偏差 (タンカー) -33- 2.5 2.5 平均値 LPG船 2.4 2.3 2.2 仮想質量係数 仮想質量係数 平均値+標準偏差 2.3 2.2 2.1 2.0 1.9 2.1 2.0 1.9 1.8 1.8 1.7 1.7 1.6 1.6 1.5 1.5 0 10,000 20,000 30,000 40,000 50,000 60,000 70,000 0 2,000 4,000 総トン数(GT) 図-C.6 仮想質量係数の回帰式および標準偏差 図-C.9 8,000 10,000 12,000 14,000 仮想質量係数の回帰式および標準偏差 (中短距離フェリー) 2.5 2.5 平均値 LNG船 2.4 平均値 長距離フェリー 2.4 平均値+標準偏差 2.3 平均値+標準偏差 2.3 2.2 仮想質量係数 2.2 仮想質量係数 6,000 総トン数(GT) (LPG船) 2.1 2.0 1.9 2.1 2.0 1.9 1.8 1.8 1.7 1.7 1.6 1.6 1.5 1.5 0 20,000 40,000 60,000 80,000 100,000 120,000 0 総トン数(GT) 図-C.7 仮想質量係数の回帰式および標準偏差 図-C.10 平均値 旅客船 平均値+標準偏差 2.3 2.2 2.1 2.0 1.9 1.8 1.7 1.6 1.5 0 20,000 40,000 60,000 80,000 100,000 120,000 総トン数(GT) 図-C.8 10,000 15,000 20,000 25,000 仮想質量係数の回帰式および標準偏差 (長距離フェリー) 2.5 2.4 5,000 総トン数(GT) (LNG船) 仮想質量係数 平均値 中短距離フェリー 2.4 平均値+標準偏差 仮想質量係数の回帰式および標準偏差 (旅客船) -34- 付録D 船種別の偏心係数の回帰式および標準偏差 本文中,4.3 パラメータの確率分布の設定において説明した船種別の偏心係数の回帰式および標準偏差のグラフを以下に 示す. 0.80 0.80 0.75 0.70 0.70 0.65 0.65 0.60 平均値+標準偏差 0.60 0.55 0.55 0.50 0.50 0.45 0.45 0.40 平均値 RORO船 0.75 平均値+標準偏差 偏心係数 偏心係数 平均値 貨物船 0.40 0 20,000 40,000 60,000 80,000 100,000 120,000 140,000 160,000 0 10,000 20,000 載荷重量トン数(DWT) 図-D.1 偏心係数の回帰式および標準偏差 図-D.4 50,000 60,000 70,000 偏心係数の回帰式および標準偏差 (RORO船) 0.80 0.80 平均値 コンテナ船 0.75 0.70 0.70 0.65 0.65 0.60 平均値+標準偏差 0.60 0.55 0.55 0.50 0.50 0.45 0.45 0.40 平均値 PCC船 0.75 平均値+標準偏差 偏心係数 偏心係数 40,000 総トン数(GT) (貨物船) 0.40 0 20,000 40,000 60,000 80,000 100,000 120,000 0 10,000 載荷重量トン数(DWT) 図-D.2 偏心係数の回帰式および標準偏差 図-D.5 平均値 タンカー 平均値+標準偏差 0.70 0.65 0.60 0.55 0.50 0.45 0.40 0 50,000 100,000 150,000 200,000 250,000 300,000 350,000 載荷重量トン数(DWT) 図-D.3 30,000 40,000 50,000 60,000 70,000 偏心係数の回帰式および標準偏差 (PCC船) 0.80 0.75 20,000 総トン数(GT) (コンテナ船) 偏心係数 30,000 偏心係数の回帰式および標準偏差 (タンカー) -35- 0.80 0.80 0.75 0.70 0.70 0.65 0.65 0.60 平均値+標準偏差 0.60 0.55 0.55 0.50 0.50 0.45 0.45 0.40 0.40 0 10,000 20,000 30,000 40,000 50,000 60,000 0 70,000 2,000 4,000 図-D.6 偏心係数の回帰式および標準偏差 図-D.9 8,000 10,000 12,000 14,000 偏心係数の回帰式および標準偏差 (LPG船) (中短距離フェリー) 0.80 0.80 平均値 LNG船 0.75 0.70 0.70 0.65 0.65 0.60 平均値+標準偏差 0.60 0.55 0.55 0.50 0.50 0.45 0.45 0.40 平均値 長距離フェリー 0.75 平均値+標準偏差 偏心係数 偏心係数 6,000 総トン数(GT) 総トン数(GT) 0.40 0 20,000 40,000 60,000 80,000 100,000 120,000 0 総トン数(GT) 図-D.7 偏心係数の回帰式および標準偏差 図-D.10 平均値 旅客船 平均値+標準偏差 0.70 0.65 0.60 0.55 0.50 0.45 0.40 0 20,000 40,000 60,000 80,000 100,000 120,000 総トン数(GT) 図-D.8 10,000 15,000 20,000 25,000 偏心係数の回帰式および標準偏差 (長距離フェリー) 0.80 0.75 5,000 総トン数(GT) (LNG船) 偏心係数 平均値 中短距離フェリー 0.75 平均値+標準偏差 偏心係数 偏心係数 平均値 LPG船 偏心係数の回帰式および標準偏差 (旅客船) -36- 付録E 船種別の防衝工の規格値の算定結果 本文中,4.4 防衝工の規格値の設定において説明した船種別の防衝工の規格値の算定結果を以下に示す. 表-E.1 防衝工の規格値の算定結果(貨物船) 載荷重量トン 破壊確率 信頼性指標 防衝工規格値 ケース DWT Pf β Ecat(kNm) DT 1 1,000 0.01 2.33 118.2 -0.066 2 2,000 0.01 2.33 148.0 -0.066 3 3,000 0.01 2.33 168.8 -0.066 4 5,000 0.01 2.33 199.2 -0.066 5 10,000 0.01 2.33 249.6 -0.066 6 12,000 0.01 2.33 264.8 -0.066 7 18,000 0.01 2.33 302.2 -0.066 8 30,000 0.01 2.33 357.0 -0.066 9 40,000 0.01 2.33 392.3 -0.066 10 55,000 0.01 2.33 435.6 -0.066 11 70,000 0.01 2.33 471.8 -0.066 12 90,000 0.01 2.33 512.8 -0.066 13 120,000 0.01 2.33 564.5 -0.066 14 150,000 0.01 2.33 608.5 -0.066 感度係数 α Vb Cm -0.993 -0.085 -0.993 -0.085 -0.993 -0.085 -0.993 -0.085 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.086 -0.993 -0.087 -0.993 -0.087 -0.993 -0.088 Ce -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.053 -0.052 -0.052 -0.052 -0.051 -0.051 表-E.2 防衝工の規格値の算定結果(コンテナ船) ケース 1 2 3 4 5 6 7 載荷重量トン 破壊確率 信頼性指標 防衝工規格値 DWT Pf β Ecat(kNm) DT 10,000 0.01 2.33 257.6 -0.065 20,000 0.01 2.33 322.9 -0.065 30,000 0.01 2.33 368.6 -0.065 40,000 0.01 2.33 405.0 -0.065 50,000 0.01 2.33 435.9 -0.065 60,000 0.01 2.33 462.8 -0.065 100,000 0.01 2.33 548.2 -0.065 感度係数 α Vb Cm -0.995 -0.066 -0.995 -0.066 -0.995 -0.066 -0.995 -0.065 -0.995 -0.065 -0.995 -0.065 -0.995 -0.064 Ce -0.044 -0.044 -0.044 -0.044 -0.044 -0.045 -0.045 表-E.3 防衝工の規格値の算定結果(タンカー) ケース 1 2 3 4 5 6 7 8 9 10 11 12 13 14 載荷重量トン 破壊確率 信頼性指標 防衝工規格値 DWT Pf β Ecat(kNm) DT 1,000 0.01 2.33 113.6 -0.175 2,000 0.01 2.33 142.2 -0.175 3,000 0.01 2.33 162.2 -0.175 5,000 0.01 2.33 191.5 -0.175 10,000 0.01 2.33 239.9 -0.175 15,000 0.01 2.33 273.7 -0.175 20,000 0.01 2.33 300.7 -0.175 30,000 0.01 2.33 343.4 -0.175 50,000 0.01 2.33 406.3 -0.175 70,000 0.01 2.33 454.3 -0.175 90,000 0.01 2.33 494.2 -0.175 100,000 0.01 2.33 512.0 -0.175 150,000 0.01 2.33 587.8 -0.175 300,000 0.01 2.33 750.3 -0.175 -37- 感度係数 α Vb Cm -0.983 -0.058 -0.983 -0.058 -0.983 -0.058 -0.983 -0.058 -0.983 -0.058 -0.983 -0.058 -0.983 -0.058 -0.983 -0.058 -0.983 -0.057 -0.983 -0.057 -0.983 -0.057 -0.983 -0.057 -0.983 -0.057 -0.983 -0.056 Ce -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 -0.028 表-E.4 防衝工の規格値の算定結果(RORO船) ケース 1 2 3 4 5 6 総トン GT 3,000 5,000 10,000 20,000 40,000 60,000 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 151.1 -0.288 0.01 2.33 178.4 -0.288 0.01 2.33 223.9 -0.288 0.01 2.33 281.6 -0.288 0.01 2.33 355.8 -0.288 0.01 2.33 409.5 -0.288 感度係数 α Vb Cm -0.946 -0.115 -0.946 -0.115 -0.946 -0.115 -0.947 -0.115 -0.947 -0.115 -0.947 -0.115 Ce -0.089 -0.089 -0.089 -0.088 -0.088 -0.087 表-E.5 防衝工の規格値の算定結果(PCC船) ケース 1 2 3 4 5 6 7 総トン GT 3,000 5,000 12,000 20,000 30,000 40,000 60,000 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 129.1 -0.276 0.01 2.33 152.7 -0.276 0.01 2.33 204.3 -0.276 0.01 2.33 243.1 -0.276 0.01 2.33 280.1 -0.276 0.01 2.33 310.4 -0.276 0.01 2.33 361.1 -0.276 感度係数 α Vb Cm -0.955 -0.080 -0.955 -0.080 -0.955 -0.080 -0.956 -0.079 -0.956 -0.078 -0.956 -0.077 -0.956 -0.075 Ce -0.066 -0.066 -0.066 -0.066 -0.066 -0.066 -0.066 表-E.6 防衝工の規格値の算定結果(LPG船) ケース 1 2 3 4 5 6 7 総トン GT 3,000 5,000 10,000 20,000 30,000 40,000 60,000 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 200.5 -0.384 0.01 2.33 236.1 -0.384 0.01 2.33 294.2 -0.384 0.01 2.33 364.7 -0.384 0.01 2.33 411.6 -0.384 0.01 2.33 446.9 -0.384 0.01 2.33 498.0 -0.384 感度係数 α Vb Cm -0.917 -0.092 -0.917 -0.093 -0.917 -0.094 -0.917 -0.095 -0.917 -0.097 -0.917 -0.099 -0.917 -0.104 Ce -0.047 -0.047 -0.047 -0.046 -0.046 -0.046 -0.045 表-E.7 防衝工の規格値の算定結果(LNG船) ケース 1 2 3 4 5 総トン GT 20,000 30,000 50,000 80,000 100,000 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 284.6 -0.204 0.01 2.33 321.5 -0.204 0.01 2.33 372.2 -0.204 0.01 2.33 420.7 -0.204 0.01 2.33 443.2 -0.204 -38- 感度係数 α Vb Cm -0.977 -0.046 -0.977 -0.047 -0.977 -0.048 -0.977 -0.049 -0.977 -0.050 Ce -0.036 -0.036 -0.036 -0.036 -0.036 表-E.8 防衝工の規格値の算定結果(旅客船) ケース 1 2 3 4 5 6 7 8 総トン GT 3,000 5,000 10,000 20,000 30,000 50,000 70,000 100,000 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 112.0 -0.197 0.01 2.33 132.2 -0.197 0.01 2.33 165.5 -0.197 0.01 2.33 207.2 -0.197 0.01 2.33 236.4 -0.197 0.01 2.33 279.1 -0.197 0.01 2.33 311.2 -0.197 0.01 2.33 349.3 -0.197 感度係数 α Vb Cm -0.976 -0.066 -0.976 -0.066 -0.976 -0.066 -0.976 -0.067 -0.976 -0.067 -0.976 -0.068 -0.976 -0.068 -0.976 -0.069 Ce -0.061 -0.061 -0.061 -0.060 -0.060 -0.060 -0.059 -0.058 表-E.9 防衝工の規格値の算定結果(中短距離フェリー) ケース 1 2 3 4 5 6 7 総トン GT 400 700 1,000 3,000 7,000 10,000 13,000 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 82.3 -0.349 0.01 2.33 98.6 -0.349 0.01 2.33 110.6 -0.349 0.01 2.33 157.0 -0.349 0.01 2.33 204.5 -0.348 0.01 2.33 227.7 -0.348 0.01 2.33 245.9 -0.349 表-E.10 ケース 1 2 3 4 総トン GT 6,000 10,000 15,000 20,000 感度係数 α Vb Cm -0.933 -0.078 -0.933 -0.078 -0.933 -0.078 -0.933 -0.078 -0.933 -0.078 -0.933 -0.078 -0.933 -0.078 Ce -0.049 -0.049 -0.049 -0.049 -0.050 -0.050 -0.051 防衝工の規格値の算定結果(長距離フェリー) 破壊確率 信頼性指標 防衝工規格値 Pf β Ecat(kNm) DT 0.01 2.33 182.0 -0.162 0.01 2.33 212.2 -0.162 0.01 2.33 238.2 -0.162 0.01 2.33 257.3 -0.162 -39- 感度係数 α Vb Cm -0.984 -0.070 -0.983 -0.071 -0.983 -0.072 -0.983 -0.073 Ce -0.038 -0.038 -0.039 -0.039 付録F 船種別の部分係数の算定結果 本文中,4.6 部分係数の算定において説明した船種別の目標信頼性指標の最適値に対する部分係数の算定結果を以下に示 す. 表-F.1 部分係数の算定結果(貨物船) ケース 1 2 3 4 5 6 7 8 9 10 11 12 13 14 載荷重量トン 目標信頼性指標 DWT βT 1,000 3.06 2,000 3.06 3,000 3.06 5,000 3.06 10,000 3.06 12,000 3.06 18,000 3.06 30,000 3.06 40,000 3.06 55,000 3.06 70,000 3.06 90,000 3.06 120,000 3.06 150,000 3.06 DT 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 部分係数 γ Vb Cm 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 2.06 1.02 Ce 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 防衝工設計値 Ecat(kNm) 118.2 148.0 168.8 199.2 249.6 264.8 302.2 357.0 392.3 435.7 471.8 512.8 564.5 608.6 Ce 1.00 1.00 1.00 1.00 1.00 1.00 1.00 防衝工設計値 Ecat(kNm) 257.6 322.9 368.6 405.0 435.8 462.8 548.3 Ce 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 防衝工設計値 Ecat(kNm) 113.6 142.2 162.2 191.5 239.9 273.7 300.7 343.4 406.2 454.2 494.3 511.9 587.8 750.3 表-F.2 部分係数の算定結果(コンテナ船) ケース 1 2 3 4 5 6 7 載荷重量トン 目標信頼性指標 DWT βT 10,000 3.06 20,000 3.07 30,000 3.07 40,000 3.07 50,000 3.07 60,000 3.07 100,000 3.07 DT 1.01 1.01 1.01 1.01 1.01 1.01 1.01 部分係数 γ Vb Cm 2.07 1.01 2.07 1.01 2.07 1.01 2.07 1.01 2.07 1.01 2.07 1.01 2.07 1.01 表-F.3 部分係数の算定結果(タンカー) ケース 1 2 3 4 5 6 7 8 9 10 11 12 13 14 載荷重量トン 目標信頼性指標 βT DWT 1,000 3.01 2,000 3.01 3,000 3.01 5,000 3.01 10,000 3.01 15,000 3.01 20,000 3.01 30,000 3.01 50,000 3.01 70,000 3.01 90,000 3.01 100,000 3.01 150,000 3.01 300,000 3.01 DT 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 -40- 部分係数 γ Vb Cm 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 表-F.4 部分係数の算定結果(RORO船) ケース 1 2 3 4 5 6 総トン GT 3,000 5,000 10,000 20,000 40,000 60,000 目標信頼性指標 βT 2.88 2.88 2.88 2.88 2.88 2.88 DT 1.20 1.20 1.20 1.20 1.20 1.20 部分係数 γ Vb Cm 1.95 1.03 1.95 1.03 1.95 1.03 1.95 1.03 1.95 1.03 1.95 1.03 Ce 1.02 1.02 1.02 1.02 1.02 1.02 防衝工設計値 Ecat(kNm) 151.1 178.4 223.9 281.6 355.8 409.5 Ce 1.01 1.01 1.01 1.01 1.01 1.01 1.01 防衝工設計値 Ecat(kNm) 129.1 152.7 204.3 243.1 280.1 310.4 361.2 Ce 1.00 1.00 1.00 1.00 1.00 1.00 1.00 防衝工設計値 Ecat(kNm) 200.5 236.1 294.2 364.7 411.5 447.0 498.0 Ce 1.00 1.00 1.00 1.00 1.00 防衝工設計値 Ecat(kNm) 284.6 321.5 372.2 420.7 443.2 表-F.5 部分係数の算定結果(PCC船) ケース 1 2 3 4 5 6 7 総トン GT 3,000 5,000 12,000 20,000 30,000 40,000 60,000 目標信頼性指標 βT 2.91 2.91 2.91 2.91 2.91 2.91 2.91 DT 1.18 1.18 1.18 1.18 1.18 1.18 1.18 部分係数 γ Vb Cm 1.97 1.01 1.97 1.01 1.97 1.01 1.97 1.01 1.97 1.01 1.97 1.01 1.97 1.01 表-F.6 部分係数の算定結果(LPG船) ケース 1 2 3 4 5 6 7 総トン GT 3,000 5,000 10,000 20,000 30,000 40,000 60,000 目標信頼性指標 βT 2.80 2.80 2.80 2.80 2.80 2.80 2.79 DT 1.41 1.41 1.41 1.41 1.41 1.41 1.41 部分係数 γ Vb Cm 1.90 1.02 1.90 1.02 1.90 1.02 1.90 1.02 1.90 1.02 1.90 1.02 1.90 1.02 表-F.7 部分係数の算定結果(LNG船) ケース 1 2 3 4 5 総トン GT 20,000 30,000 50,000 80,000 100,000 目標信頼性指標 βT 2.99 2.99 2.99 2.99 2.99 DT 1.09 1.09 1.09 1.09 1.09 -41- 部分係数 γ Vb Cm 2.02 1.00 2.02 1.00 2.02 1.00 2.02 1.01 2.02 1.01 表-F.8 部分係数の算定結果(旅客船) ケース 1 2 3 4 5 6 7 8 総トン GT 3,000 5,000 10,000 20,000 30,000 50,000 70,000 100,000 目標信頼性指標 βT 2.99 2.99 2.99 2.99 2.99 2.99 2.99 2.99 DT 1.09 1.09 1.09 1.09 1.09 1.09 1.09 1.09 部分係数 γ Vb Cm 2.02 1.01 2.02 1.01 2.02 1.01 2.02 1.01 2.02 1.01 2.02 1.01 2.02 1.01 2.02 1.01 Ce 1.01 1.01 1.01 1.01 1.01 1.01 1.01 1.01 防衝工設計値 Ecat(kNm) 112.0 132.2 165.5 207.2 236.4 279.1 311.2 349.2 表-F.9 部分係数の算定結果(中短距離フェリー) ケース 1 2 3 4 5 6 7 総トン GT 400 700 1,000 3,000 7,000 10,000 13,000 目標信頼性指標 βT 2.84 2.84 2.84 2.84 2.84 2.84 2.84 表-F.10 ケース 1 2 3 4 総トン GT 6,000 10,000 15,000 20,000 DT 1.32 1.32 1.32 1.32 1.32 1.32 1.32 部分係数 γ Vb Cm 1.93 1.01 1.93 1.01 1.93 1.01 1.93 1.01 1.93 1.01 1.93 1.01 1.93 1.01 Ce 1.00 1.00 1.01 1.01 1.01 1.01 1.01 防衝工設計値 Ecat(kNm) 82.3 98.6 110.6 157.0 204.5 227.7 245.9 部分係数の算定結果(長距離フェリー) 目標信頼性指標 βT 3.02 3.02 3.02 3.02 DT 1.06 1.06 1.06 1.06 -42- 部分係数 γ Vb Cm 2.04 1.01 2.04 1.01 2.04 1.01 2.04 1.01 Ce 1.00 1.00 1.00 1.00 防舷材設計値 Ecat(kNm) 182.0 212.2 238.2 257.3 付録G 船種別の部分係数の標準値 本文中,4.6 部分係数の算定において説明した船種別の部分係数の標準値の詳細について以下に示す. 表-G.1 部分係数の標準値(詳細) 目標信頼性指標βT 2.33 目標破壊確率 PfT 0.01 船 種 貨物船 コンテナ船 タンカー ロールオン・ ロールオフ (RORO)船 自動車専用 (PCC)船 LPG 船 LNG 船 旅客船 中短距離 フェリー (航海距離 300km 未満) 長距離 フェリー (航海距離 300km 以上) 部分係数 感度係数 γ α 変動係数 V 排水量 DT 接岸速度 Vb 1.01 2.06 -0.066 -0.993 0.045 0.350 仮想質量係数 C m 1.02 -0.086 0.060 偏心係数 C e 排水量 DT 接岸速度 Vb 1.01 1.01 2.07 -0.052 -0.065 -0.995 0.036 0.045 0.350 仮想質量係数 C m 1.01 -0.065 0.045 偏心係数 C e 排水量 DT 接岸速度 Vb 1.00 1.07 2.04 -0.044 -0.175 -0.983 0.030 0.127 0.350 仮想質量係数 C m 1.01 -0.057 0.040 偏心係数 C e 排水量 DT 接岸速度 Vb 1.00 1.20 1.95 -0.028 -0.288 -0.947 0.020 0.240 0.350 仮想質量係数 C m 1.03 -0.115 0.085 偏心係数 C e 排水量 DT 接岸速度 Vb 1.02 1.18 1.97 -0.088 -0.276 -0.956 0.064 0.225 0.350 仮想質量係数 C m 1.01 -0.078 0.056 偏心係数 C e 排水量 DT 接岸速度 Vb 1.01 1.41 1.90 -0.066 -0.384 -0.917 0.047 0.382 0.350 仮想質量係数 C m 1.02 -0.096 0.073 偏心係数 C e 排水量 DT 接岸速度 Vb 1.00 1.09 2.02 -0.046 -0.204 -0.977 0.034 0.152 0.350 仮想質量係数 C m 1.00 -0.048 0.034 偏心係数 C e 排水量 DT 接岸速度 Vb 1.00 1.09 2.02 -0.036 -0.197 -0.976 0.025 0.146 0.350 仮想質量係数 C m 1.01 -0.067 0.047 偏心係数 C e 排水量 DT 接岸速度 Vb 1.01 1.32 1.93 -0.060 -0.349 -0.933 0.042 0.320 0.350 仮想質量係数 C m 1.01 -0.078 0.058 偏心係数 C e 排水量 DT 接岸速度 Vb 1.01 1.06 2.04 -0.050 -0.162 -0.983 0.036 0.117 0.350 仮想質量係数 C m 1.01 -0.071 0.050 偏心係数 C e 1.00 -0.038 0.027 -43- 平均値と 特性値の比 µ/Xk γ の計算に用いる 目標信頼性指標 β T’ 3.06 3.07 3.01 2.88 2.91 1.000 2.80 2.99 2.99 2.84 3.02 港湾空港技術研究所資料 No. 1115 2006.3 編集兼発行人 独立行政法人港湾空港技術研究所 発 行 所 独立行政法人港湾空港技術研究所 横 須 賀 市 長 瀬 3 丁 目 1 番 1 号 TEL. 046(844)5040 URL. http://www.pari.go.jp/ 印 刷 所 昭和情報プロセス株式会社 Copyright C(2006)by PARI All rights reserved. No part of this book must be reproduced by any means without the written permission of the President of PARI. この資料は,港湾空港技術研究所理事長の承認を得て刊行したものである。したがって,本報告 書の全部または一部の転載,複写は港湾空港技術研究所理事長の文書による承認を得ずしてこれを 行ってはならない。
© Copyright 2026 Paperzz