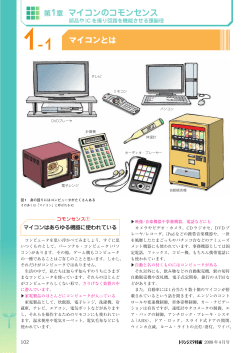
【図1】 洞結節(SAノード) 右心房 左心房 ヒス(HIS)束 房室輪 房室結節(AVノード) 右束ブランチ 左束ブランチ 左心室 右心室 プルキンエ 繊維網 心室中隔 【表1】 組織名称 心筋 組織導電率[S/m] 0.943 骨格筋 体液 0.408 1.547 血液 0.606 骨 脂肪 0.00625 0.02~0.0667 麻酔下にある犬の肺組織 0.04608 L.A.Geddesらの文献より抜粋 【図2】 + 興奮電流(電流源) - 前 帰還電流 右肺 左肺 右側 左側 後ろ 【図3】 R波 T波 P波 U波 Q波 S波 右房興奮 左房興奮 (a)心房興奮 (b)心房収縮 (c)心房弛緩 (d)心室興奮 (e)心室収縮 (f)心室弛緩 【図4】 標準12誘導法 ●標準肢誘導(Ⅰ、Ⅱ、Ⅲ)は四肢電極間の電位差 ●単極肢誘導(aVR、aVL、aVF)はその四肢電極電位から残り2極の 平均電位を差し引いた電位差 Ⅰ誘導 - + RA - LA aVR aVL RA - LA aVF Ⅱ誘導 Ⅲ誘導 V1 V2 + LF RF(基準電極) + LF V3 V6 V4 V5 胸部単極誘導法 (胸部電極電位)ー(RA,LA,LFの平均電位) 【図5】 R波 (a) デルタ波 T波 P波 U波 Q波 S波 R波 (b) T波 P波 U波 Q波 S波 STセグメントの下降例 前回計測したR-R間隔 【図6】 20代女性 60代男性 私 今回計測したR-R間隔 電気絶縁対策 マイコン 心電計 アンプ USBシリアル フォトカプラ コンバータ AN0 USB RxD 商用電源 TxD 絶縁型 DC/DCコンバータ 3.3V 5V 商用電源 心電計 アンプ マイコン ワイヤレス 通信 AN0 モジュール RxD TxD ZigBee Bluetooth WiFi 電池3V 内蔵バッテリー USBシリアル マイコン コンバータ 心電計 アンプ AN0 RxD USB TxD 5V 3.3V 3端子 レギュレータ 計装用アンプ G=11 【図1】 非反転増幅器 G=51 LPF fc=300Hz AC結合 マイコン USBシリアル フォトカプラ コンバータ AN0 AC結合 Ref 3.3V vout 1 vin dt RC USB RxD TxD 積分器 絶縁型 DC/DCコンバータ 1.65V ボルテージフォロワ 3.3V 5V ボルテージフォロワ 電気絶縁対策 Ⅰ誘導 - RA + LA R波 1.5mVpp LA RA T波 P波 RF(基準電極) U波 Q波 S波 基線 【図7】 計装用アンプ G=11 非反転増幅器 G=51 LPF fc=300Hz AC結合 マイコン AN0 USBシリアル フォトカプラ コンバータ AC結合 Ref vout USB RxD 3.3V 1 vin dt RC TxD 積分器 絶縁型 DC/DCコンバータ 1.65V ボルテージフォロワ 3.3V ボルテージフォロワ 3端子レギュレータ 5V 電池 006P 9V 電気 絶縁 対策 Ⅰ誘導 - RA + R波 LA 1.5mVpp LA RA T波 P波 RF(基準電極) U波 Q波 S波 基線 miniUSB コネクタ 歩行やジョギング時 の心電図計測 c 短距離走、マラソン 等の激しい運動時 の心電図計測 ●安静時の心電図計測 ●歩行やジョギング時の 心拍計測(ソフト処理必要) 心電図測定用電極 (ステンレスまたは 導電性ゲル電極) ここに、ステンレス または導電性ゲル 電極を取り付ける miniUSB コネクタ c 心電図測定用電極 (ステンレスまたは 導電性ゲル電極) 蓋 【図11】 【フィルタ・アルゴリズム】 毎回累積加算を行わず、前回との差分だけを計算して1周期分の移動加算を行う。 sum d0 d1 d2 d3 d4 d5 d6 d7 sum d1 d2 d3 d4 d5 d6 d7 d8 sum sum d0 d8 sum d2 d3 d4 d5 d6 d7 d8 d9 sum sum d1 d9 sum d3 d4 d5 d6 d7 d8 d9 d10 sum sum d2 d10 A/D FIFO + - オフセット値Oz2 除去周波数×n Sum + + (n=2L) 【リングメモリFIFO・アルゴリズム】 ポインタptrによりリングメモリを構成し、FIFOとする。 FIFO d6 din d7 ptr d8 d1 din dout d2 d3 d4 d5 dout dout=M(ptr); /* ①データを取り出す。 */ M(ptr)=din; /* ②データを入れる。 */ ptr=ptr+1; /* ③ポインタをインクリメント(+1) */ if( ptr==nFIFO) ptr=0; /* ④循環するようにポインタを修正する。 */
© Copyright 2026 Paperzz