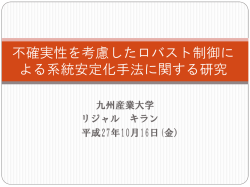
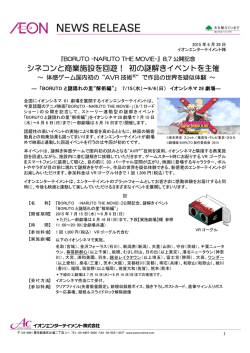
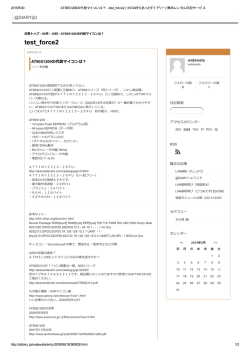
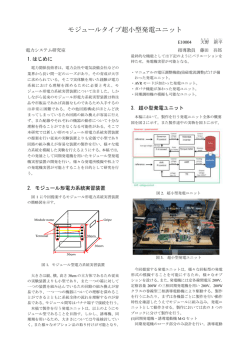
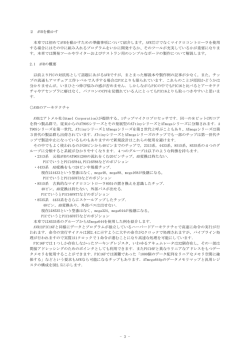
過渡現象を考慮した産業用電力系統の設計上の留意事項と課題 浦野 要 恭博 旨 発電機を有する産業用電力系統において,電力動揺や電圧不安定現象の過渡現 象が発生することがあり,電力系統解析を実施しながら発電設備や中央変電所の 設計を進めている。しかし,定量的な評価に基づいた設計手法の確立のためには まだまだ課題があり,電力系統解析の精度も向上させなければならない。あまり 知られていない電気設備の過渡現象について解説を加えるとともに,課題につい て述べる。 1 に対して 25~120%超)で,1 秒周期の激しいもの はじめに 電気設備の設計は,静的な現象を対象に大半が進 であった。 められる。しかし,実際の電力系統では事故等の 出光では,1991 年より動的過渡安定度領域の電 擾乱により様々な過渡現象が発生しており,これ 力動揺と電圧不安定現象に注目して,電力系統解 に起因してトラブルが拡大することから,過渡現 析を用いながら設計を進めている。電力動揺は, 象を考慮した設計が必要となる。 制御系を無視した固有安定度領域と制御系を考慮 図1は電力系統で発生する過渡現象を変動時間 と系統規模で分類したものである。 1) した動的安定度領域の電力動揺に分類され,さら に動的安定度領域の電力動揺は動的過渡安定度領 域と動的定態安定度領域の電力動揺に分類され2), 解析系統の規模(発電機数) 1000 A製油所の事例は動的定態安定度領域の電力動揺 電力潮流 100 に該当する。この領域の電力動揺を解析するため には,電力会社の詳細データが必要となるが,入 高調波 過電圧 10 手が困難なため,過去,電力系統解析の対象には 電力動揺 してこなかった。しかし,動的定態安定度領域の サージ 1 〈雷〉 〈開閉〉 軸ねじれ 電力動揺はこの事例をはじめ,出光でも数度のト 電圧不安定 ラブルが報告されており,解析に取り組む必要が μs ms 1周期 1s 1min 1h 時間スケール 図1 電力系統で発生する過渡現象 ある。また,他にも過渡現象を対象にした設計に は課題がある。 そこで産業用電力系統で発生する電力動揺と電 自家用発電機を有する産業用電力系統(以下,産 業用電力系統)では,電力動揺や電圧不安定現象は 圧不安定現象について解説するとともに,産業用 電力系統設計上の留意事項と課題を紹介する。 固有の問題があり,発電機や中央変電所の設計に 当っては留意しなければならないことがある。 出光でも,最近では 2004 年 11 月に,A製油所 でガスタービン発電機更新後の試運転で電力動揺 が発生している。 2 2.1 電力動揺とその対策 電力動揺の発生原因 電力動揺とは,発電機が系統と連系している場合 に,発電機に与えられる運動エネルギーと発電機 この電力動揺は,100%出力試験時に発生し,動 が発生する電気エネルギーのバランスがくずれ, 揺幅は 6,100~30,000kW 超(定格出力 25,000kW 系統との間で激しい電力授受を繰り返すことであ る。電力動揺は起因となる擾乱の大きさにより, 力会社と非連系か連系かにより制御対象が異なり, 動的定態安定度領域の電力動揺と動的過渡安定度 産業用発電機が非連系(自立)運転時は,負荷に応じ 領域の電力動揺があり,現象と対策が異なる。 て電圧と周波数が変化するため,AVR 制御は電圧 電力動揺を知るためには,発電機内の運動エネル を,ガバナ制御は周波数を制御する。電力会社と ギーと電気エネルギーの関係を知る必要があり, 連系(並列)運転時は電圧と周波数は電力会社に 最初に発電原理や交流の本質と合わせて述べる。 よって制御されているため,AVR 制御は無効電力 1) を,ガバナ制御は有効電力(出力)を制御している。 発電原理と交流の本質 発電機の原理は,図2に示すように回転子上の電 無効電力については詳細は省略するが,モータの 磁石が回転することにより,発電機の固定子コイ 電磁力等が該当する。名前から損失と誤解しやす ル内に電気を誘起(発生)するものである。 いが,損失ではなくモータの運転にとって必要な 交流は,流れる向きが交互に変ることから交流と 言われている。しかし,図2のように三相端子で みれば,N 極によって誘起される+電位は a 相→c’ 電力である。 (2) 発電機における運動方程式と出力の関係 発電機の過渡現象を考える上では,過渡解析モデ 相→b 相→a’相→c 相→b’相と回転しており,交 ルが必要であり,モデルは N 極上の仮想コイルを 流の本質が回転であることが判る。電力動揺や電 用いる。この N 極上の仮想コイルに発生する誘起 圧不安定現象は,交流機器が回転しているために 電圧(以下,内部誘起電圧)と固定子端子の電圧(以 発生している。 下,端子電圧)間の位相差を元に過渡現象を解析す +電位 a相 c’ 相 る。3)この位相差を内部相差角と言い,内部相差 a 相端子 角によって出力は決まる。 回転方向 N b’ 相 回転子 b相 S a’ 相 -電位 図2 図3は内部相差角と出力の関係を示すものであ る。 内部相差角 内部相差角0° c相 a相 a相 a~c :端子側コイル a’~c’ :中性点側コイル 発電原理 次に,制御系について概説する。タービン発電機 の制御には自動電圧調整装置(以下,AVR 制御)とガ バナ制御がある。 仮想コイル N 運動(機械)エネルギーを 電気エネルギーに変換 S S (a)無負荷時 図3 N (b)負荷時 発電出力と内部相差角 固定子に誘起される電圧を制御するためには,回 転子上の電磁石の強さを調整する必要があり, AVR 制御は界磁電流を調整して電圧を制御してい る。 発電機が電力会社の電力系統と連系されている 時,端子電圧は電力会社により固定されている。 また,発電機はタービンにより回転子に与えられ 無負荷時は,内部誘起電圧と端子電圧は同じ位置 た運動エネルギーを電磁石を介して固定子に伝達 にあり,図3(a)のように,内部相差角は 0°,出 し,電気エネルギーに変換して出力する。ガバナ 力は 0kWである。発電機に加えられる運動エネル はタービンに流入する運動エネルギーを調整する ギーが大きくなると,図3(b)のように,発電機は ことにより,発電機出力を制御している。 位相差を開き出力する。 AVR 制御とガバナ制御は,産業用発電機では電 出力Pは内部誘起電圧 Ef,端子電圧 V,内部相 差角δを用いて より発生するもので,擾乱には電力会社の潮流変 Ef・V P= sin Xd 化や発電機制御による変動がある。A製油所の事 δ 例は電力会社の系統条件が弱く,ガバナ制御が不 ここで,Xd:内部インピーダンス 安定に至ったものである。 で表すことができる。 図4は,A製油所ガスタービン発電機の電力動揺 また,前述のように交流の本質は回転であるか 波形である。 ら, 電力動揺の初期では,最初に電圧がわずかに変動 カバナで制御される機械入力 Pm と発電機出力 Pe しており,これにつれて回転数が変動し始め,回 の関係は,内部相差角δによる運動方程式 転数の変動を検出してガバナ信号が変動している。 d δ 2 M dt 2 dδ +D dt ここで,M:慣性定数 時刻 a では,ガバナ信号は急増抑制の保護システ + Pe=Pm ムが動作して絞り込まれているが,出力,回転数 D:制動係数 ともさらに変動を拡大している。 Pm:機械入力(タービンからの入力) Pe:発電機出力 時刻 b では,ガバナが大きく絞られているにも関 らず,出力は増加し回転数は低下していることが で表すことができる。 判る。このことは,タービン発電機が保有してい る運動エネルギーを減速しながら放出し,出力し 2.2 2.2.1 (1) 電力動揺の発生原因とその対策 ていることを示している。 動的定態安定度領域の電力動揺 このように,変動を繰り返す電力動揺を乱調(パ 現象と原因 ワースィング)と言う。ここで,電力動揺の起因と 動的定態安定度領域の電力動揺は,小さな擾乱に なった AVR 制御を含めた励磁システムの変動によ 出力(MW) 32.8 3.38 0 10 20 30 (秒) 0 10 20 30 (秒) 53.125 0 11.48 10 20 30 (秒) 10 20 30 (秒) タービン 回転数(rpm) 7326 7224 電圧(kV) 燃料信号(%) 68.75 11.01 0 時刻a 時刻b 図4 A製油所電力動揺波形 り回転数が変動した理由について説明する。 り発生する。 式(1)より,出力は図5の電力-相差角曲線で示 このため,ガバナ制御のゲインを適正にすること すことができ,電力-相差角曲線は Ef・V/Xd を最 が最も効果的であるが,電力会社の構成や強さに 大値とする正弦波となる。通常時は出力 Pe は,図 よっても異なるため一律ではない。このため,防 5(a)のように,ガバナ制御が調整する機械入力 Pm 止対策として,少なくとも にバランスしている。 ① P P Ef・V Xd 電力会社との並列運転時のガバナ制御は,基 本的にはガバナフリー制御は選択しないシス 曲線2 テムとする。ガバナフリー制御とする場合は, 曲線0 AVR 制御を含め感度に注意する必要がある 曲線0 Pm0=Pe0 Pm0=Pe0 ② 曲線1 δ0 δ (a)AVR 変動前 δ0 δ1 δ2 産業用タービン発電機は GD2が小さいため, ガバナ回路の PID 制御において微分要素は使 用しない δ (b)AVR 変動時 図5 電力-相差角曲線と AVR 制御の動き ことが必要である。 課題として,設計の定量的評価方法の確立があ る。このためには,電力動揺が発生する系統条件 の把握が必要であり,電力系統解析が有効と考え AVR 制御が変動した場合,内部誘起電圧 Ef が変 るが,動的定態安定度領域の電力動揺へ電力系統 動するため,図5(b)のように,電力-相差角曲線 解析を適用するためには,電力会社の詳細データ は,曲線1と曲線2を繰り返し変動する。この時, の入手と巨大なネットワークである電力会社系統 ガバナ制御は一定のため出力は一定のままで,内 の簡易モデル化が課題である。 部相差角だけがδ1からδ2の間で変動する。 内部相差角は,回転子上のN極の位置(内部誘起 電圧の位置)であり,内部相差角の変動は回転子の 変動状態を示す。図4の初期に AVR 制御の変動に より,回転数が変動したのはこのためである。 2.2.2 (1) 動的過渡安定度領域の電力動揺 現象と原因 動的過渡安定度領域の電力動揺は,大きな擾乱に より発生するもので,擾乱には短絡事故等がある。 また,電圧変動が拡大した理由は,電力会社の系 短絡事故回路を,図6に示す。短絡事故時は,負 統が弱いために,AVR 制御の変動により端子電圧 荷インピーダンス(抵抗)をバイパスする回路とな が変動した結果,AVR 制御が不安定になったため るため,定格電流の数~20 倍程度の短絡電流が流 であり,電圧の変動に従って回転数が大きく変動 れ,系統電圧は著しく低下する。 しガバナ制御が応答している。このように,動的 系統電圧V 受電系インピーダンス 定態安定度領域の電力動揺は電力会社の系統条件 が大きく影響する。 対策として,電力会社の条件が不明なため,出光 受電系 電源 短絡 発電系インピーダンス 負荷インピーダンス 側で対策を行うこととし,AVR を含んだ励磁装置 のゲインをメーカーの設計値以下に設定し,内部 抵抗 リアクタンス 相差角の変動を抑制するようにした。 (2) 設計上の留意事項と課題 動的定態安定度領域の電力動揺は,小さな擾乱 を起点にしてガバナ制御が不安定になることによ 図6 短絡事故回路 G発電機 発電機出力 P は,系統電圧 V,発電機電流 IG, 加速し同期外れに至る。 力率 cosφにより 発電機が電力系統から同期外れとなること P=V・IGcosφ (3) を脱調と言う。 で表される。 ② 収束時の動き 従って,短絡事故時は系統電圧の低下により出力 短絡事故を高速遮断することにより脱調を が低下し機械入力と差を生じるため,発電機は加 防止し安定に回復できる。図 7(b)は高速事故遮 速する。この加速エネルギーは種々の条件により 断時の出力の動きである。 大きさが異なり,限界を超えると電力会社の電力 事故遮断により,系統電圧は系統条件により 系統と発電機は同期外れを起こしてしまう。電力 決まる電圧まで回復するため,電力-相差角曲 -相差角曲線により同期外れ現象と防止策を説明 線は事故中の曲線 1 から曲線 2 に移行し c 点か する。 ら e 点へ移動する。高速事故遮断時の加速(蓄 ① 同期外れ時の動き 積)エネルギー(図 7 (b)の面積 abcd)は小さく, 図7(a)は,同期外れ時の出力の動きである。 f 点でエネルギーの放出を完了し e 点に向かい, P P P0max Pm0=Pe0 Pe1 a c b δ 0δ 1 e Pm0=Pe0 a Pe1 曲線 1 同期外れ点 加速方向 δ (a)同期外れ時 図7 って安定する。 P2max 曲線 0 曲線 0 P0max d 動揺を繰り返しながら収束し,Pm0=Pe2とな P0max f e P1max dc g b 曲線2 図7の動揺現象は説明を簡単にするため,制御系 を無視したが,実際の電力動揺では制御系の動作 も加わるため,過渡現象は複雑となる。 曲線 1 δ0δ1δ2 (2) δ 加速方向 (b)収束時 短絡時の動揺現象 設計上の留意事項と課題 動的過渡安定度領域の電力動揺の防止対策とし て,以下があり,電力系統解析を行い効果につい て定量的に把握し設計の妥当性を評価する必要が ある。 短絡事故時は系統電圧が低下するため,事故 発生と同時に電力-相差角曲線は曲線 0 から ① 短絡事故の高速遮断 ② AVR 制御の応答性の向上 ③ 系統インピーダンスの低減 曲線 1 となる。この時内部相差角は変化しない 留意事項として, ため,運転状態は a 点から b 点に移動し,出 ① AVR 制御の応答性を上げることは,事故後の 力は Pe0から Pe1へ低下する。一方,ガバナの 電力-相差角曲線を高めて加速エネルギーの 動きは,電気系の動きに比べて遅く機械入力 放出を早めることを目的にしているが,反面動 Pm は一定のままであり,Pm0>Pe1となって, 的定態安定度領域の安定性を損なうこともあ タービン発電機は加速し曲線 1 上を c 点へ向か るため,上限値の見極めが必要となる。 い,面積 abc で示される運動エネルギーを蓄積 する。 ② 系統インピーダンス Xd を小さくすることは, ①項同様,事故後の電力-相差角曲線を高める c 点を越えると Pm0<Pe1となるため,出力 ことを目的にしているが,短絡電流が大きくな と機械入力の差は蓄積した運動エネルギーを り,設備容量,機器仕様へ影響するため,費用 放出して供給される。蓄積エネルギー(面積 対効果を考慮する必要がある。 abc)>放出エネルギー(面積 cde)の場合は e 点 を超えてしまうため,再び Pm0>Pe1となり このため,高速遮断が最適な方法と言える。 また,課題としては,脱調限界の見極めがある。 脱調が懸念されるのは,構内負荷系統の短絡事故 (2) 設計上の留意事項と課題 であり,脱調限界を構内系の過電流保護協調にも 電圧不安定現象に対するの防止策は以下のもの 反映している。出光では電力系統解析により,脱 があり,電力系統解析を行い効果について定量的 調限界を事故遮断 0.5 秒と考えているが,発電機の に把握し設計の妥当性を評価する必要がある。 励磁方式等の条件でも異なるため,一律では無く ① 系統条件との関係を見極める必要がある。 短絡事故の高速遮断 事故を高速遮断することにより,電動機の回 転数低下を小さく抑えて再加速電流を抑制し, 3. 電圧不安定現象とその対策 (1) 電圧回復性を向上する。 現象と原因 ② 事故遮断後の電源容量に応じた負荷遮断 製油所・工場の電力負荷の特徴は,電動機負荷が 図9の産業用電力系統の短絡事故点は,電力 大半を占めることである。電動機のトルクは電圧 会社の電力系統(短絡事故点 A),発電系統(短絡 の二乗に比例するため,短絡事故時はトルクが低 事故点 B),負荷系統(事故点 C)に大別できる。 下する。図8は負荷トルクと電動機トルクの関係 事故点 A の場合,事故遮断後は発電系統だけ 及び電動機電流と回転数の関係を示したものであ で再加速電流を供給する必要があるが,再加速 る。 電流は全電動機の定格電流の 2~4 倍であり, 短絡事故時は,図8のように電動機トルクが負荷 発電機の定格電流を超えてしまうため電圧が トルク以下となるため,電動機は回転数を低下す 回復しない。このため,回復可能な負荷量まで る。 遮断する必要がある。電力系統解析の結果,残 負荷量は高速遮断限界の 0.15 秒遮断の条件下 電 流 電動機電流 で,定格発電機出力の 50~60%にしなければな らないことが判った。 ト ル ク 運転点 電動機トルク (定格トルク) 定格負荷トルク 運転点 (定格電流) 受電系統 発電系統 G 短絡点A 短絡点B 受電変圧器 短絡時の電動機トルク 負荷トルク 無負荷回転数 二次変電所 変圧器 定格回転数 図8 短絡事故時の電動機トルクと回転数の変化 低圧用 変圧器 事故遮断により,上位系統の電圧は回復するもの M の,電動機は元の回転数に戻ろうとして一斉に再 高圧電動機群 加速電流を要求する。この再加速電流は定格電流 M 低圧電動機群 の 2~4 倍となるため電圧降下は大きく,系統電圧 の回復は遅れる。このため,電動機は所定のトル 短絡点C 図9 産業用電力系統の構成と事故点 クを得られないため加速できず,再加速電流は流 れ続け,いつまでも電圧が回復しないばかりか過 発電系統や負荷系統の事故時は,電力会社の系 電流継電器が動作して広範囲の停電に至ることが 統が残るため電圧回復性は良いが,事故時間の長さ ある。この電圧回復の遅れを電圧不安定現象と言 や系統インピーダンスにより,回復時間が異なるた う。 め,電力系統解析により再起動電流の収束時間を把 握して過電流保護協調に反映する必要がある。 ③ べる。 励磁装置頂上電圧の変更 ②項の負荷遮断量は大きいため,製油所・工 4.電力系統解析の適用と課題 場の運用上許容されないことがある。そこで, 産業用電力系統の電力動揺と電圧不安定現象に AVRを含めた励磁装置の頂上電圧を上げて ついて3項までに解説し,対策に当って電力系統 電圧回復性を向上させるものである。 解析が不可欠であることを述べた。電力系統解析 は,表1に示す様々な汎用系統解析ソフトウェア 図 10 は,B工場動力設備での頂上電圧変更前後 が開発されており 4),誘導電動機モデルの有無, ガバナ制御や AVR モデル制御の多さ,ユーザへの の電力系統解析結果である。 本事例では,発電機定格出力 47,200kW に対し オープン性等から選択する必要がある。 て,残負荷量 35,900kW を供給する必要があった が,電力系統解析結果,電圧は回復しないことが 判り(図 10(a)),頂上電圧を 1.4 倍に変更して電圧 を回復させることができた(図 10(b))。 電圧[pu] 1.0 -1.0 0 1.0 2.0 (秒) (a)改造前の電圧回復性解析結果 表1 開発元 EMTP NETOMAC PSS/E Y 法(‘83 に改良 Y 法) EUROSTAG 米国政府エネルギー省ボンネビル庁 Siemens(ドイツ) Power Technologies Inc.社 電力中央研究所 EDF+TRACTEBEL(フランス、 ベルギー) New Energy Associates 社 電源開発株式会社 米国 OTI (Operation Technology Inc.)社 米国 SKM Systems Analysis, Inc. 英国 IPSA Power Ltd. 米国 EDSA Micro Corp. カナダ CYME International Inc. ドイツ DigSILENT Gmbh PROMOD ESPRIT ETAP PowerStation Power*Tools IPSA EDSA CYME DigSILENT PowerFactory 電圧[pu] 1.0 汎用系統解析ソフトウェア 名称 電力系統解析については,電動機モデルが開発さ れたことから,出光でも,中央変電所や発電設備 -1.0 の設計に適用するようになった。しかし,電力系 0 1.0 2.0 (秒) (b)改造前の電圧回復性解析結果 図10 頂上電圧変更前後の電圧回復 統解析は電力会社,電気機器メーカーや大学を中 心に開発されてきたため,産業用電力系統への適 用は遅れており,学問的にも確立されているとは 頂上電圧とは急激な電圧降下発生時に界磁電流 言い難い。電力系統解析の内,電力動揺と電圧不 を急増させる回路であり,頂上電圧を上げること 安定現象の解析用の安定度解析について概説する は励磁系の余裕が無くなり,常時の AVR 制御の応 とともに課題について述べる。 答も過敏になる。このため,励磁装置や動的定態 4.1 安定度解析の構成 安定度への影響の見極め等の検討が必要であり, 安定度解析の計算に用いる方程式は、発電機や誘 また,発電機メーカの許諾の上で慎重に行わねば 導電動機の内部状態をあらわす微分方程式と系統 ならない。 状態変化を示す系統方程式とこれらを連携する諸 電圧安定性については,電力系統解析を用いた 設計手法を確立しており,課題としては電力系統 解析の精度向上がある。これについては次項で述 式で構成されている。産業用電力系統動特性モデ ルの概念図を図 11 に示す。1) 電力系統 自家発電装置モデル 座標変換 IRI VY = I I dq RI 系統方程式 発電機方程式 dq VRI V dq 回転子方程式 PM Δω IRI VRI VG E df 誘導機 励磁制御系 同期電動機 その他 AVR,PSS 調速機 産業用負荷モデル 微分方程式 代数方程式 IRI :ノード注入電流 固定子座標系 VRI:ノード電圧 固定子座標系 I q :ノード注入電流 回転子座標系 V dq :ノード電圧 回転子座標系 d PM:機械出力 E df :界磁電圧 VG:発電機ノード電圧 図 11 Δω:速度偏差 産業電力系統動特性モデル概念図 このうち,発電機モデルは,式(1)の回転子方程式 ① 産業用負荷の縮約方法の確立 (運動方程式)の他,固定子コイルと励磁回路の関係 産業用電力負荷の最大の特徴は,誘導電動機 を示す発電機方程式からなる。発電機方程式は, が数千~1 万台と極めて多数設置されているこ 単相の励磁回路と三相の固定子コイルの関係を, とである。このため,全てを模擬することは実際 相互インピーダンスを用いて表わすことが難しい 的ではなく,数台~数十台の電動機に等価縮約し ため,励磁回路上の仮想コイル(直軸)とこれに 90° て解析している。縮約は,理論的な手法やトラブ 遅れた仮想コイル(横軸)の2軸方程式で等価的に ルデータにより様々な試みが行われているが,標 表わされている。このため,発電機モデルは,座 準手法として確立が必要である。 標交換計算式により三相に変換され系統方程式と ② ガバナ制御モデル上の課題 連携されている。また,発電機モデルには,ガバ 電力系統解析は,ガバナモデルを国内標準モ ナ制御や AVR 制御モデルが組み込まれており,動 デル,IEEE(米国電気電子技術者協会)モデル等 的解析を可能にしている。 の標準モデルに等価的に置き換えて解析してい るが,標準モデルは電力会社向けのモデルが多 4.2 安定度解析の課題 安定度解析は,電力会社の電力系統を対象にし く,産業用ガバナ回路を等価回路では表現し切 れない場合もある。 て開発されてきたため,産業用電力系統固有の問 例えば,出光の蒸気タービン発電機には,圧力 題に適用するには工夫を要する。代表的な産業用 の異なる蒸気系統に蒸気を供給することを優先し 電力系統の安定度解析上の課題について以下に述 ながら発電する多段抽気復水タービンがあるが, べる。 汎用系統解析ソフトウエアには,このモデルは準 備されていない。このように,産業用ガバナは, 電力会社用ガバナと目的が違い,場合によっては 複雑である。 このため,等価ガバナ制御モデルの解析精度へ の影響の評価が必要であり,影響が大きければ, 産業用ガバナ制御モデルを新たに開発する必要が ある。 5.おわりに 出光では,他社に先駆けて平成3年より安定度解 析を導入し,動的過渡安定度,電圧安定性を解析 しながら,設計に反映してきた。しかし,本稿で 紹介したように,安定度解析にはまだ取り組むべ き課題がある。 主な課題として ① 産業用ガバナモデルの開発と検証 ② 負荷モデルの縮約方法の検討による系統解 析精度の向上 ③ 動的定態安定度領域への電力系統解析の適 用の検討 がある。 このためには,電力会社の協力はもちろんのこと 大学との連携も必要と考えている。現在,産業用 系統連系技術の高度化協同研究会を立ち上げて, 安定度解析の検証と適用の拡大について取り組む とともに,大学と連携し産業用ガバナモデルの開 発と検証を計画している。緒についたばかりであ り,結果については,あらためて報告する予定で ある。 参考文献 1) 加戸,浦野,壹岐,堀,亀田,産業用電力系統 のトラブルと解析,OHM3 月号(2003) 2) 新田目倖造,電力系統技術計算の応用 3) 電気学会技術報告:第798号「同期機諸定数 の適用技術」(2000) 4) 電気協同研究:第51巻第4号「電力系統・設 備のシミュレーション技術」(1996)
© Copyright 2026 Paperzz