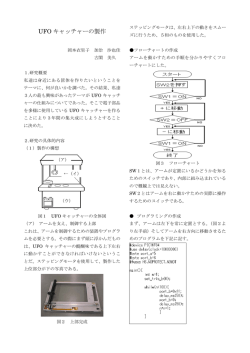
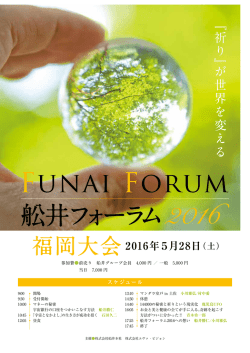
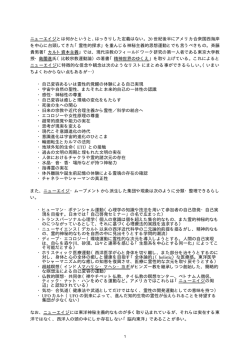
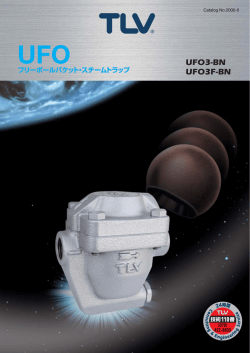
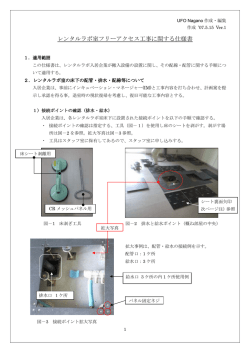
課題研究最終発表報告書 UFO キャッチャー製作 研究者 4 番 井上 聖也 5 番 岩本 大樹 9 番 柿沼 陽人 20 番 徳田 昇汰 22 番 生井 健 31 番 町田 翔太 37 番 山口 佑太 指導教員 清野 聡 先生 1 はじめに 私たちは、高校生活 3 年間のうちに学んできたことを活かし、情報技術科で学べる技術を利用 して「文化祭」や「久喜市民まつり」、「埼玉県産業教育フェア」で触って体験できるものを作る ことにした。 2 研究目的 各種イベントにおいて、子供から大人まで幅広い年齢層の人が見てわかりやすく、すごいと思 ってもらえる製作物がいいと考え、マイコンを利用して細かな制御のできる「UFO キャッチャー」 を製作した。 3 研究概要 UFO キャッチャーを製作するにあたって、ゲームセンターで 稼働しているような既存の UFO キャッチャーと同じ仕組みでは オリジナル性に欠けるため、私たちは独自のアームの動き方を 考察し、右図のような動き方のアームを搭載しようと考えた。 仕組みは、まず中央を支点にモーターを搭載し、円を描くように アームを支えるレールが回転する。次にスイッチを押している間 レールに沿ってアームが移動し、アームの降下位置が決定すると いうものである。この実現のため、DC モーター及びステッピング モーターの動作を理解し、それを上手く利用しイメージ通りの UFO キャッチャー完成を目指す。 (図 2)製作したアーム (図 1)イメージ図 (図 3)実験の様子 4 研究内容 スケジュールを(表 1)のように決めたが、スケジュール管理の甘さから(表 2)のように進んだ。 (表 1)当初のスケジュール (表 2)実際のスケジュール <入力部> 2 つのボタンでアームを『回転する動作』と、 『横移動をさせる 動作』を制御するようにし、景品をつかむときの動作や取り出し 穴へ移動させる動作は、自動で行うように考え製作した。 <制御部> ステッピングモーター3台とDCモーター1台を動作させるため (図 4)制御回路図 にドライバを 7 個使用することにした。製作当初は 1 つのマイコン でこのすべてのドライバを制御する予定だったが、1 つで運用する とマイコンが発熱してしまった。最終的に回路を 2 つに分けると 安定した動作をした。発熱した原因として考えられるのは、1 つの マイコンで出力できる電流の上限が使用するドライバの電流を賄う ことが出来ずに発熱してしまったのではないかと考察した。 <外装> (図 5)アームの様子 丈夫で軽い本体設計を考えていたので材料はアルミを主体とし て使っていくことにした。アームの構造は、バネでアームの先に つけた 2 つのアク取りスプーンを引っ張り開かせ、モーターで紐 を巻くことでアームを閉めるという動作にした。工夫した点とし て、ねじ切りを回してナットを回転させナットに固定したアーム が移動する仕組みにして製作した。 5 研究結果 (図 6)外装 高さ 60cm×横 50cm×縦 60cm の大きさで、今回の UFO キャッチャーの製作費用は約万円で した。当初の目的である、マイコンを利用して細かな制御を行うことのできる UFO キャッチャ ーを製作することができた。 6 おわりに モーターの制御や外装からアームの設計、製作まで当初の予定通りにはあまり進ませることが 出来なかった。本体の電源にはバッテリーを使い UFO キャッチャー単体で稼働させることが出 来るようにしていきたい。未完成の状態なのでたくさんの人に楽しんでもらえるように最後の作 業をしていきたいと思う。
© Copyright 2026 Paperzz