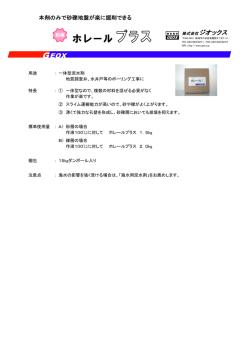
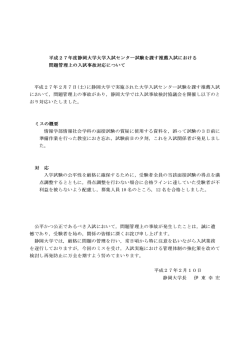
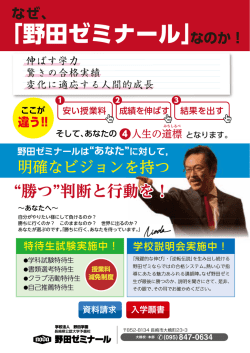
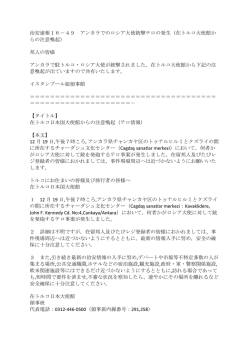
で学ぶディジタル信号処理の基礎 第 回 ディジタルフィルタ 川又 政征 はじめに 本講座の第 げ,第 回では,ディジタルフィルタをとりあ 回および第 回のディジタルフィルタの設 計のために必要な基礎事項をまとめている。ディジタ 上式は による のたたみこみあるいはたたみ ルフィルタは線形性かつ時不変性をもつ離散時間シス こみ和とよばれる。たたみこみは,図 テムであり,数学的にとりあつかいやすく,ディジタ ように,入力信号 ル信号処理では離散フーリエ変換とともに最も重要な を生成するシステムであるとみなすことができる。式 が の計算法あるいは図 信号処理手法である。 まず,ディジタルフィルタの時間領域におけるアル のようなシステムをディ ジタルフィルタとよぶ 。ディジタルフィルタの出力 ゴリズムであるたたみこみと差分方程式について説明 を表す式 し,周波数応答を求める。次に,離散時間信号とディ とよばれる。実際,式 ジタルフィルタの解析のために必要な数学的道具であ 位インパルス とおくとき,その応答 る 変換を導入する。連続時間信号やアナログフィル タ,連続時間制御理論においては,ラプラス変換が有 用な数学的道具であることはよく知られている。離散 時間信号やディジタルフィルタの解析において,これ と同様の役割を に示される を経由して出力 において, ンパルス応答)は確かに は単位インパルス応答 において 単 (単位イ となることが容易にた しかめられる。 次式のように記号 を用いて,たたみこみは簡 略に表現される 。 変換はになっている。さらに,ディ ジタルフィルタの数学的な解析のために伝達関数を利 用する。ディジタルフィルタの安定性は伝達関数の極 また,式 の位置によって決定される。 することもできる。 の右辺の変数を変換して次のように表現 ディジタルフィルタとたたみこみ いま,二つの信号 と から新しい信号 を生成する次の計算に注目しよう。 東北大学大学院工学研究科 〒 仙台市青葉区荒巻字青葉 フィルタとは,不要なものを取りのぞく濾過器の意味である。 実際,適当な単位インパルス応答をもつディジタルフィルタは不要 な信号をとりのぞくことができる。ディジタルフィルタの機能につ いては,第 回の講座であつかわれる。 記号 を単純な乗算と考えてはいけない。本講座では,記 は のように複素数 の共役を表すためにも使われるこ 号 とにも注意してほしい。 【例題 図 ディジタルフィルタ 】 次の 単位インパルス応答 フィルタ を考える。 を図示せよ。また,こ のフィルタに単位ステップ入力 が入ったと きの応答(単位ステップ応答)を求め,図示せよ。 ディジタルフィルタの単位インパルス応答 が有 限区間の数列であるとき,このようなディジタルフィ フィルタという。一方, 単位インパルス ルタを 応答 が無限区間の数列であるとき,このような フィルタという。 ディジタルフィルタを 【例題 】 信号 と単位インパルス応答 が与えられたとき,たたみこみの結果 を計算する関数 を定義せよ 。また,こ れを用いて,次のような 信号 【 フィルタ が入ったときの出力 に 単位インパルス応答 を求めよ。 】 たたみこみの簡単な計算例 単位ステップ応答 以下 ディスプレイの表示 図 【 ディジタルフィルタの応答 】 たたみこみの計算 【 には,たたみこみを計算する関数 が用意され ているので,実際には,これを利用することをすすめる。 】 フィルタのインパルス応答とステップ応答 ディジタルフィルタの安定性と因果性 以上の数値から, のときには, は十 分に小さいため ,ディジタルフィルタは安定であり, ディジタルフィルタは,ソフトウェアやハードウェ アなどの実際的な手段で実現される。このために,実 際に実現でき,信号処理を行うことができるような ディジタルフィルタを作ることが必要である。そこで, ディジタルフィルタに対して,有限な入力に対する出 力が発散しないこと(安定性)と,実際に入力が入っ てから出力がでること(因果性)が要求される。 ジタルフィルタは不安定であると推測できる。 以上のようにディジタルフィルタの安定性は,その 単位インパルス応答の絶対値和が有限であるか否かに よって判別される。しかし,数値計算によって単位イ ンパルス応答の絶対値和 を無限の時刻まで求める ことは不可能であり,これによる安定性の判断は正確 節では,ディジタ ルフィルタの安定性を判別する方法として,伝達関数 ディジタルフィルタの安定性は以下のように定義さ れる。すべての時刻 に対して となると は有界であるという。任意の有界入力 を印加し,その結果有界出力を生ずるとき,このディ ジタルフィルタは安定であるという。ディジタルフィ ルタ は十分大きいため ,ディ 性を欠くことになる。そこで, 安定性 き,信号 のときには, は単位インパルス応答の絶対値和が次のよ うに有限であるときに限って安定であることが知られ ている。 の極を用いる方法を説明する。 因果性 ディジタルフィルタは入力に対して応答して出力を 出すものであるから,入力が実際に入ってから出力が 出てくるディジタルフィルタが実際には実現可能であ る。このようなディジタルフィルタは因果的あるいは 実現可能であるという。ディジタルフィルタ は 単位インパルス応答が次の条件を満足するときに限っ て因果的となることが知られている。 【例題 フィルタ 】 次の単位インパルス応答をもつ を考える。 の それぞれの場合について,単位インパルス応答の 因果的ではないディジタルフィルタは非因果的であ を求め,このフィルタの安定性を判 るといわれる。非因果的ディジタルフィルタは,実質 絶対値和 的に入力が入る前に応答をするディジタルフィルタで 別せよ。 あるため,物理的には実現することができないが,信 号処理の数学的理論や概念上で重要なものである。 【 】 ディジタルフィルタの安定性の判別 線形差分方程式 前節では,入出力関係が式 あるいは式 のた たみこみで表されるシステムをディジタルフィルタと よんだ。一方,入出力関係が線形差分方程式で表され るシステムもディジタルフィルタとよぶ。 ディジタルフィルタの入出力関係を表す 次差分 方程式の一般形は次式で与えられる 。 以下 ディスプレイの表示 実際には,それぞれ である。 は数値の無限大(オーバーフロー)を意味する。 差分方程式の入力 と出力 の関係は,たたみこみを 使っても表すことができることが知られている。この意味で,差分 方程式で表されるシステムもディジタルフィルタである。 ただし, に対しては と 式 と式 する。上式の意味することは,ディジタルフィルタ 分方程式の係数 の現時点での出力 パルス応答 が,現在および過去の入力 と,過去の出力 はディジタルフィルタの単位イン に等しいことがわかる。したがって, 単位インパルス応答 との線形結合で決定される ことである。ここで, の比較から,非再帰形フィルタの差 を用いると非再帰形フィル タの入出力関係は以下のように表される。 をディジタルフィルタの次数 という。ディジタルフィルタの特性は係数 よって決定される。係数 と と に は一般には複素数 であるが,多くの信号処理において実数の値として与 【例題 えられる。 係数 】 ディジタルフィルタの差分方程式の と たとき,式 が与えられ,入力 に従って出力 が与えられ を計算する関 数 を定義せよ 。また,この関数を用 いて,次の 次差分方程式 再帰形フィルタのアルゴリズム で記述される再帰形フィルタの単位インパルス応 答と単位ステップ応答を求め,図示せよ。ただし, とする。 非再帰形フィルタのアルゴリズム 図 】 (図 ) 次再帰形フィルタの応答 ディジタルフィルタ のとき,入力 れる様子を図 から出力 が計算さ に示す。この図と式 かるように,少なくとも一つの 力 【 からわ のときは,出 の計算のために,すでに計算されている出力 がふたたび用いられる。このため,図 のよう なディジタルフィルタを再帰形フィルタとよぶ。 一方,式 において,すべての に対して のとき 【 となる。 のとき,入力 算される様子を図 からわかるように,出力 から出力 に示す。図 】 差分方程式によるディジタルフィルタリング が計 と式 の計算のために,すで に計算されている出力を必要とすることはない。この ため,このようなディジタルフィルタを非再帰形フィ ルタとよぶ。 には,差分方程式を計算する関数 が用意さ れているため,実際には,これを用いることをすすめる。 図 単位インパルス応答 数 ディジタルフィルタの周波数応答 の複素指数関数 を入力するとき,たたみこみの式 タルフィルタ を用いてディジ の出力は次のように得られる。 単位ステップ応答 ここで 図 次再帰形フィルタの応答 とおけば,ディジタルフィルタの出力を次のように記 述することができる。 ここで,複素数 の絶対値 と位相 を用いて とおけば,式 は次のように表される。 ディジタルフィルタの周波数応答 以上のように,ディジタルフィルタに周波数 素指数関数を入力したときの応答を 複素指数関数入力に対する応答 知ることができる。このため, たたみこみや差分方程式は,時間変数 を用いて の複 によって はディジタル フィルタの周波数応答とよばれる。周波数応答は一般 ディジタルフィルタの動作を表しているため,時間領 には複素数である。 域表現とよばれる。次にディジタルフィルタの周波数 ジタルフィルタの振幅特性および位相特性とよばれる。 領域表現について考えよう。周波数領域表現は周波数 変数 図 を用いてディジタルフィルタの機能を表す。 のように,ディジタルフィルタ に周波 式 と はそれぞれディ のように与えられるディジタルフィルタの 周波数領域表現は単位インパルス応答 の 離散時 間フーリエ変換である。よって,周波数応答 から単位インパルス応答 は以下の離散時間フー リエ逆変換によって得られる。 【例題 】 次の 次非再帰形フィルタ の 周波数応答を求め,その振幅特性と位相特性を図 示せよ。 振幅特性 【 】 (図 ) 次非再帰形フィルタの周波数応答 位相特性 図 次非再帰形フィルタの周波数応答 ここで 差分方程式によって表されるディジタルフィルタ の周波数応答 差分方程式によって表される再帰形フィルタの周波 数応答を求めよう。式 き, において とお とお い た 。し た がって,上 式 によって 与え ら れ る が差分方程式によって表される再帰形フィル および となることを利用すると,次式が得られる。 タの周波数応答を表す。この周波数応答には係数 と が含まれているため,係数 と によって周 波数応答が決定される。 なお,式 上式から を求めると において とおけば, 式 の非再帰形フィルタの周波数応答は次のように求めら れる。 非再帰形フィルタの単位インパルス応答は であることを用いると,上式は単位インパルス応答を 用いて以下のように書きかえられる。 【例題 】 式 の差分方程式で表される 次再帰形フィルタの振幅特性と位相特性を求め, 図示せよ。周波数応答を求めるために, の関数 周波数応答の性質 を用いることができる。 ここでは,ディジタルフィルタの周波数応答として 重要な以下の性質をあげておく。 周期性 任意の整数 に対して 対称性 実数の単位インパルス応答 あるいは実係 数の差分方程式のディジタルフィルタに対して 振幅特性 したがって,以下のように振幅特性 偶対称性をもち,位相特性 は は奇対称性を もつ。 たたみこみ たたみこみ 位相特性 図 次再帰形フィルタの周波数応答 あるいは差分方程式 に対応する離散時間フーリエ変換は 【 】 (図 ) 次再帰形フィルタの周波数応答 となる。上式から,入力の周波数スペクトル が周波数応答 によって変形さ れ,出力の周波数スペクトル が得られ ることがわかる。したがって,入力の特定の周 波数成分の振幅を拡大縮小したり,位相を進ま せたり遅らせたりすることがディジタルフィル タの周波数応答 によって可能となる。 変換 いることができる 。 変換の定義 信号 変換は形式的には次のように定義さ の れる。 ただし,いずれの信号も ここで は複素変数であり, が収束するような 範囲の値をとるものとする。 の 変換を と書くことにする。 変換について考察するときに必 要になる複素平面を で定義されてい るものとする。 平面とよぶ。 因果的信号 に対しては,以下のように 【 】 数式処理による 変換 変換が与 えられる 式 と式 を区別するため,それぞれ両側 変換および片側 変換とよぶ が収束する の範囲を の収束領域とい う。一般に,収束領域 はある正の数 と に よって 以下 ディスプレイの表示 のような不等式として表される。図 収束領域 は に示すように, 平面の原点を中心とする半径 と の円で囲まれる環状の領域である。 変換と離散時間フーリエ変換との関係 次に 変換と離散時間フーリエ変換の関係につい て述べよう。信号 の は複素数であるから, 図 変換の収束領域 変換 において, ( は非負の実数, は実数) と書くことができる。これを 変換の定義 式に代入すると次式が得られる。 【例題 】 次の信号の を求めるために, 変換を求めよ。 変換 の関数 を用 上式において る。したがって, すべての という。 に対して となる信号を因果的信号 とすれば, の 変換において 例題 と で用いている関数 と 上で数式処理システム するためには, が利用できるようになっている必要がある。 とな と を利用 した場合が の離散時間フーリエ変換となってい る。このため,離散時間フーリエ変換は 位円で定義された 平面上の単 変換であるということができる。 によって逆 式 変換は与えられるが,これを 実際に用いることは極めて煩雑となる。このため,因 果的信号で,その 変換が有理多項式となっている場 合には,いくつかの実際的な方法によって容易に逆 変換の性質 変換を求めることができる。 変換には,数多くの重要な性質がある。以下に最 【例題 】 例題 も重要な三つの性質をあげておく。 で求められた 変換 のそれぞれの逆 変換 を求め,これらがもとの信号(式 線形性 )に一致することを確認せよ。逆 任意の定数 と に対して 換を求めるために, の関数 変 を 用いることができる。 推移 と任意の正整数 因果的信号 に対して が成り立つ。 【 上の性質において, に対して のとき,信号 】 数式処理による逆z変換 は単位時間遅れている信号で あり,この単位時間の信号の遅れは 変換では となって現れていることになる。 たたみこみ 単位インパルス応答 こみ による のたたみ は次のように表される。 以下 ディスプレイの表示 たたみこみ の 変換は と の 変換を用いて次式で与えられる。 逆 関数 逆 変換 から 信号 変換とよばれる。 を求める変換は の逆 の 変換は次式によっ ディジタルフィルタの伝達関数 て与えられることが知られている。 伝達関数 ただし, は の収束領域内にあり,原点を反 時計まわりにまわる閉路である。 ディジタルフィルタの入力 対する出力 の 変換 の の比 変換 に をこ 上式の両辺に 変換を適用すると, 変換の線形性と 推移の性質から たたみこみ と な る 。よって ,ディジ タ ル フィル タ の 伝 達 関 数 は上式から以下のように求めら れる。 伝達関数 図 ディジタルフィルタの入出力関係 たとえば,式 のディジタルフィルタの伝達関数という。図 示される単位インパルス応答 に の 次差分方程式で表されるディ ジタルフィルタの伝達関数は以下のように与えられる。 をもつ因果的ディ ジタルフィルタの伝達関数を求めよう。このディジタ ルフィルタの入力 と出力 の関係は以下の 以上のように,ディジタルフィルタの伝達関数 たたみこみによって記述される。 はディジタルフィルタのたたみこみあるいは差分方程 式に一対一で対応し,この意味でフィルタの入出力関 係を一義的に記述する。そこで,ディジタルフィルタと 上式の両辺に 変換を適用すれば, 変換のたたみこ みの性質から,次式が成立する。 式 の伝達関数 達関数 タルフィルタ ここで, は単位インパルス応答 の 変換 を同一視する。すなわち,伝 をもつディジタルフィルタを単にディジ とよび,図 のように表す。 伝達関数と周波数応答 である。すなわち ディジタルフィルタの伝達関数 代入すると,関数 式 より,伝達関数 応答の 変換 は単位インパルス の範囲)であり,ディジタルフィルタが タであるならば,式 波数応答となる。これは,単位インパルス応答 義式 が有限長( フィル の右辺の無限和を と伝達関数の定義式 を比較することに るディジタルフィルタにおいては,周波数応答の定義 式 たとえば,式 解される。 フィルタの伝達関 の定 より明らかである。また,差分方程式によって表され までの有限和におきかえれば伝達関数が求められる。 で表される を はディジタルフィルタの周 をもつディジタルフィルタの周波数応答 そのものとなる。 もし,単位インパルス応答 に と伝達関数の定義式 の比較から容易に理 数は以下のように与えられる。 ディジタルフィルタの極と零点 極と零点 次に, 次差分方程式で記述される次のディジタ 次ディジタルフィルタ ルフィルタを考える。 関数 は に関する を考える。この伝達 次の有理多項式として, のように表される。 となる の値を伝達関数あるいはディジタ ルフィルタの零点という。零点は分子多項式 の根 である。 一方, となる の値を伝達関数あるい はディジタルフィルタの極という。 の有限な値の極 は分母多項式 は の根である。極は また にも現れることに注意してほしい。 【例題 】 式 の 次 【例題 】 式 の 次 フィルタ の極と零点を求め, 平面上に図示せよ。 フィルタの極と 零点を求め, 平面上に図示せよ。多項式の根を 求めるために,関数 を利用し, 平面上に 極と零点を図示するために,関数 を利用 することができる。 図 【 図 【 極と零点の配置 】 (図 ) フィルタの極と零点の配置 極と零点の配置 】 (図 ) フィルタの極と零点の配置 以下 ディスプレイの表示 以下 ディスプレイの表示 安定性と極 において,ディジタルフィルタの安定性は,その単 位インパルス応答 の絶対値和が有限であるとき に限って成立ことを説明した。しかし,この絶対値和 を実際に数値計算で求めることは不可能である。ディ 参考文献 ジタルフィルタの安定性に関して次の定理がある。こ の定理を利用すれば,ディジタルフィルタの極の大き さを知ることで,安定性を判別できる。 ディジタルフィルタの安定性の定理 ディジタルフィルタ は,そのすべての極の 絶対値が より小さいときに限って安定であ る。いいかえれば,ディジタルフィルタは,そ のすべての極が 平面上の単位円内(図 樋口龍雄,川又政征 . 昭晃堂, は 本書に関する であり,ここでは, が掲載されている。 対応 ディジタル信号処理, の使い方や本書のプログラム ) にあるときに限って安定である。 本講座の 図 【例題 】 式 平面上の単位円 の 次 フィルタ の安定性を判別せよ。 【 】 極によるディジタルフィルタの安定性判別 以下 ディスプレイの表示 会員。 のプログラムが掲載されている。 川又 政征 年 東北大学大学 院工学研究科電子工学専攻博士課程修 年 同 通信工学科教授, 了, 年 東北大学大学院工学研究科電子工 学専攻教授。この間,1次元および多 次元ディジタルフィルタの設計,知的 信号処理,画像・映像処理などに関す 年度 計測自動制 る研究に従事。 年度 計測自動制 御学会論文賞, 年 第 回 日 御学会著述賞, 科学賞を受賞。電子情報通信 本 学会,計測自動制御学会,情報処理学 などの 会,映像メディア学会, 。
© Copyright 2026 Paperzz