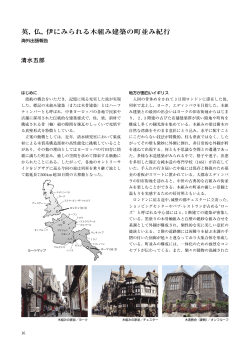
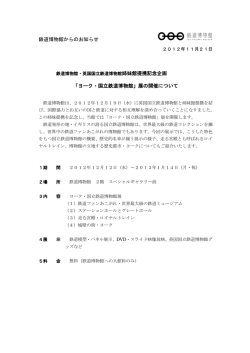
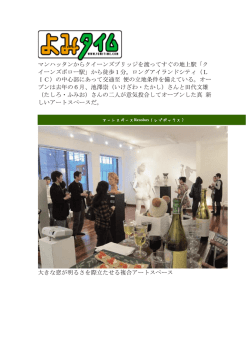
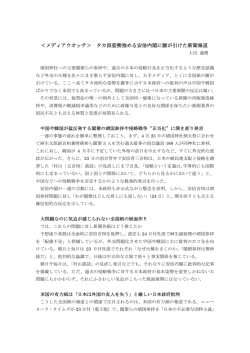
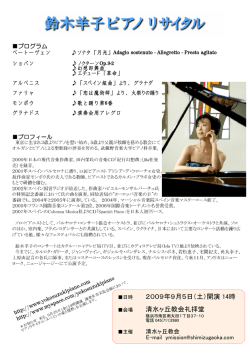
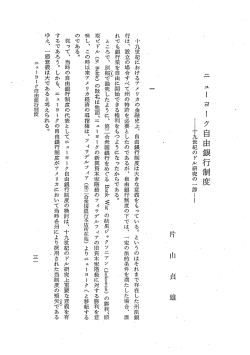
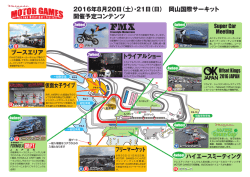
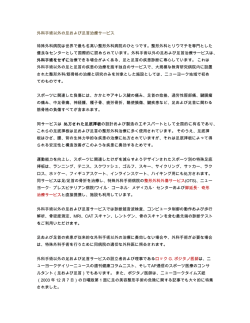
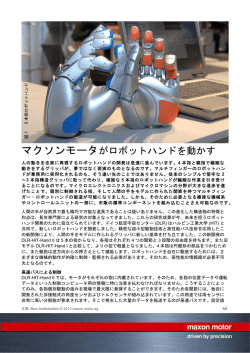
昭 和 電 線 レ ビ ュ ー 46 Vol. 51, No. 1 (2001) 省エネタイプのリニアモータ Saving Energy Type of Linear Motor 森 山 毅* Tsuyoshi MORIYAMA 本報告は各種産業用分野で飛躍的に省エネ効果を発揮する当社独自の下記リニアモータについて紹介する。 1)位置決め装置用の省エネタイプのリニアモータについて 2)コンプレッサ用の省エネタイプのボイスコイルモータについて This report introduces the original linear motor given below which shows the rapid saving energy effect in the field of the industry of all kinds. 1) Concerning the saving energy type of linear motor for positioning equipment. 2) Concerning the saving energy type of voice coil motor suitable for compresser. 1.は じ め に 代表的な事例を解説する。 2.位置決め装置用省エネタイプの リニアモータについて 本報告は,省エネタイプのリニアモータに関する。 空気中の二酸化炭素増大による地球温暖化の問題が顕在 化し,これに対する対策が世界的に叫ばれるなか,二酸化 炭素の排出を伴う,高度情報社会にむけた IT 化によるエ ネルギー消費の増大,化石燃料の燃焼により動力を得る車 等の開発途上国への一層の普及によるエネルギー消費の増 大等が新たな問題として立ち塞がりつつある。 このため,発電設備の効率向上の技術革新,自動車の低 2.1 位置決め用リニアモータの基本性能 位置決め用リニアモータには,下記の基本性能が一般的 に要求される。 ① 推力リップル(変動)が小さく,推力ができるだけ 均一である事 ② 電流と推力の関係ができるだけ線形である事 燃費化を指向した直接燃料噴射の内燃機関化或いは内燃機 ③ 小形・軽量で強い推力が発生できる事 関と電動機による駆動を適宜切り替えるハイブリッド化等 ④ 剛性が高い事 の新技術が特に注目されている。また,二酸化炭素を排出 ⑤ 制御性がよい事 しない燃料電池にも期待が集まっており,特に,将来の家 ⑥ 発熱が少ない事 庭用電力として期待され,炭化水素ガスを改質して水素ガ スを燃料とする燃料電池や,ガソリン或いはメタノールを これらの基本性能が何故大事か,位置決めシステムのブ ロック図に基づいて簡単に説明する。 (図 1) 改質して水素ガスを燃料とする自動車用の燃料電池等の開 位置決めシステムの動作を簡単に説明すると,現在位置 発も活発に行われており,直接二酸化炭素を排出していた と現在速度をフィードバックしたサーボシステムで,目標 発電設備,自動車等の分野に新しい技術が育成されつつあ 値と現在位置との差,設定速度と現在速度との差に応じた る。 モータ電流を発生させ,モータの推力定数により決まる推 しかし,その他多くの産業用分野でも,上記分野の排出 量よりは少ないものの,確実にエネルギーを消費し,間接 的に二酸化炭素を排出するモータ類が数多くの分野で使用 力がモータで発生する。この推力と可動子の質量で決まる 加速度,速度で動作し,目標地点まで移動する。 ここで,もし,推力にリップルがあると,加速度,速度, されている。これらのモータのエネルギー効率を高くでき 現在位置も変動し,この変動は位置センサーを介してフィ れば,間違いなく二酸化炭素の排出が抑制される事は明確 ードバックされ,一層振動が増幅される事となるわけで, である。 これは制御性の悪化を意味する。 次章からリニアモータのエネルギー効率を高めた当社の また,電流と推力との線形性についても,モータの推力 ゲインが変わる事となり,サブミクロン以上の高精度制御 * サーボ事業推進室 が要求されるような場合では,微振動発生の原因となる。 省エネタイプのリニアモータ 47 コア(コギング発生) 指令 電圧 発生部 偏重 カウンター部 アンプ (転流) モータ (3相) U 転起電圧 速度フィードバック 積分 要素 コイル W V S 吸引力 大 N S 推力 N S 転 流 ヨーク 磁石 位置フィードバック 位置センサ 図 2 コア付リニア同期モータ 図 1 位置決めシステムの概略ブロック図 ヨーク N 剛性については,これは可動子のモータの推力発生箇所 から位置センサーまでの剛性,可動子が剛体と見なせる程 S N U S W N S V 3相コイル1 (小判型) 非磁性ボビン (剛性確保) 磁石 剛性があったとしてもベアリング部の接触剛性,或いは, S N S モーメント復元剛性が低いと,モータの推力発生部と位置 N S N 3相コイル2 ヨーク センサーの箇所との間に位相差が発生し,位置センサーは これを検出してフィードバックループ内に帰還させる。従 図 3 コアレスリニア同期モータ って,位相差が 90 度以上あると,不安定となり,制御不能 となりやすい。 従って,このような場合では,モータの最大推力が動的 に加わったときに,少なくとも,位置センサー部の変位が 位置分解能より小さい事が制御安定性にとって重要であ コギングが大きく,停止精度,整定時間の悪 化 ④ コイルの AT による磁場の変動,磁極の磁気 飽和により推力の非線形性,頭打ち る。 小形・軽量で強い推力が発生できる事は直感的にも理解 できることであるが,小形・軽量であれば,上記剛性のと ころで説明したのと同様で制御安定性を得やすい。 発熱がすくない事はこれも直感的にも理解できることで あり,発熱が多いと,周囲の温度が上昇し,熱膨張の誤差 ⑤ 磁気吸引力によるモータの組み立て作業性の 悪化,危険性 ⑥ 精密制御が困難 (2) コアレスの特徴 コア付と異なり,コイル部に磁性材料がない。従って, 左手のフレミング則に基づいて推力が発生する。 が生じる。 また,発熱が少ない事は省エネ効果にも繋がり,今後の モータにとっては重要な課題となる。 2.2 ③ 当社の位置決め用省エネタイプのリニアモータ 一般的に,位置決め用のリニアモータとして代表的なも のはリニア同期モータがあり,これは他のモータと異なり, 比較的に制御性に優れ,しかも,大きな推力,移動量を簡 単に得られるからである。これにはコア付とコアレスタイ 長所:① コギングがない ② 推力変動が小さい ③ 磁気吸引力がない ④ 精密制御が容易 短所:① 磁石の磁場の有効活用が低い ② 大推力確保が困難 1 000 N 程度以下 プがあるが,それぞれの長所,短所を説明する。(図 2 及 ③ コイルがフラットのため,捩剛性が低い び図 3) ④ 整定時間の悪化 (1) コア付の特徴 コイルを 3 相交流で励磁し,磁極の極性と磁石の極性と の吸引・反発により推力を発生する。 長所:① 大推力を容易に確保 ② 剛性が高い 短所:① 可動子と固定子間に推力の 4 から 5 倍程度の 磁気吸引力が作用 ② 磁気吸引力による変形等を防ぐため機械が大 型化し,著しい重量増を招く ⑤ AT による磁場の変動,ヨークの飽和により, 推力の非線系性,頭打ち (3) 当社の省エネタイプのコアレスリニア同期モータ (特許出願済) 構造的特長:① センターヨーク採用 ② センターヨークを囲む密接コイル列 ③ U,− U,W,−W,V,− Vのコイル列 ④ 磁石 4 ヶとコイル 6 ヶとが同一ピッチ 長所:① 磁石の磁場の有効効率がほぼ 100 %と 昭 和 電 線 レ ビ ュ ー 48 Vol. 51, No. 1 (2001) 表 1 当社品と従来品との差異 ヨーク N S N S N S N センターヨーク N S N S N S 当社品 従来品 出力 500 W 500 W ジュール熱 170 W 340 W 0W 40 W 磁石 U −U W −W V −V N 3相コイル 鉄損 ヨーク 機械損 計 図 4 当社の省エネタイプのコアレスリニア同期モータ 10 W 10 W 680 W 890 W 73 % 57 % モータ効率 なお,このことは逆の見方でみれば,同じ消費電力とし なり大推力が容易(10 kN 程度) ② 各相のコイルからの磁束を相殺でき, たとき,当社品のリニア同期モータは従来のコアレスリニ ア同期モータより大きな推力が得られることを意味する。 場の乱れヨークの飽和等を防げる 3.当社のコンプレッサ用省エネタイプの ボイスコイルモータ ③ 推力変動,推力の頭打ちの回避 ④ コイルの断面 2 次モーメントを大きく とれ,高剛性が容易 ボイスコイルモータを搭載したコンプレッサとしては, ⑤ 整定時間の短縮 赤外線センサー,次世代携帯電話基地局の情報処理能力を ⑥ 精密制御が容易 飛躍的に高める超伝導フィルター等の冷却用として− 200 ℃ ⑦ ジュール熱当りの出力が高い 程度の冷却能力を有する極低温冷凍機用のものがある。こ ⑧ 鉄損が少ない のタイプの冷凍機は,リニアモータを内臓するコンプレッ ここで,省エネ効果について説明を加えると,モータの 消費電力 P は サ部と 1 自由度系の膨張冷却部とで構成される。コンプレ ッサ部では,ボイスコイルモータの可動子(コイル ASSY) が密閉された He ガスと機械バネの合成バネと共振する周 P = FV + J + W + W1 波数で駆動され,効率良く He ガスを膨張部へ圧送する。 この圧送された He ガスは,膨張部内で共振する銅網積層 FV :出力(W) F :実効推力= KI(N) 部内を経て膨張し,− 200 ℃程度となり,各種センサー, V :実効速度(m/s) フィルター等を冷却する。 2 J :ジュール熱= 3RI (W) W :コイルの動磁束による鉄損(W) W1 :摩擦等の機械損(W) K :推力定数(N/A) I :モータの実効電流(A) R :相抵抗(オーム) 3.1 極低温冷凍機用のボイスコイルモータについて 極低温冷凍機に搭載のボイスコイルモータは,左手のフ レミング則に基づいて推力を発生し,交番電流に応じて, ピストンを圧縮・膨張させる。 しかし,図 5 に示すように,これまでのボイスコイルモ ータはコイルから発生する交番磁束によりヨーク内に渦電 流が発生し,鉄損を生じていた。この鉄損は,コンプレッ 上式より,当社のものは以下の事が言える。 サの効率向上を妨げる大きな障害となっているばかりか, ① 同じ出力であれば,磁石の磁場の有効活用の程度が この鉄損によりコンプレッサの筺体の温度が上昇し,場合 高い程,推力定数が高くなり,必要なモータ電流が少 によっては,強制冷却等が必要となるなどコストアップの なくてすむ。 要因を招きやすい。 ② このことは,ジュール熱が低減することを意味する。 ③ また,各相のコイルからの動磁束は相互に相殺され るので,ヨーク内に発生する渦電流はほとんど皆無と なり,鉄損が著しく減少する。 仮に,磁石の有効活用の程度が 4 割程度向上すれば,推 一般的に,コンプレッサの効率は以下の式で表される。 効率= FV/ (FV + RI2 + W + Wm) ここで, F :ガスを圧縮・膨張するモータの実効推力(N) V :ピストンの実効速度=√2 πfa(m/s) 力定数は約 4 割程度向上するので,同じ出力とすれば,ジ f :駆動周波数(Hz) ュール熱は 50 %程度低減することとなる。 a :振動振幅(m) 例えば出力を 500 W 程度とした従来品との比較を表 1 に 示す。 R :モータの抵抗(オーム) I :コイル励磁電流の実効値(A) W :鉄損(W) Wm :機械損(W) 省エネタイプのリニアモータ 49 ばね コンプレッサ部 冷凍部 銅網積層部 Heガス 磁石 N N コイル :実測値 コ ン 80 プ レ 50 ッ サ 効(%) 率 当社の効率 従来の効率 50 小 100 仕事率(W) 150 大 機械ばね ピストン N N 図 5 従来の極低温冷凍機のボイスコイルモータの概略 図 7 従来方式と当社方式のコンプレッサ効率の比較 イルから発生する磁束は,同じ AT とほぼ同じ磁気抵抗で あるから,同じ強さとなり,ほぼ相殺される。 すなわち,鉄損が殆ど皆無となり,コンプレッサ効率を 従来では,50 Hz の駆動周波数の場合,効率は約 60 %前 向上できる。 実際,従来の鉄損に相当する 23 W 分が改善された結果 後の測定結果がでている。 が得られている。この結果,効率を約 85 %程度まで向上す 具体的には,仕事: 54 W ることができた。 ジュール熱 : 12 W なお,従来とのコンプレッサ効率の比較図を図 7 に示す。 鉄損 : 23 W その他 : 2 W 4.今後の展開 計 : 91 W 等の値となっている。 今回,省エネ技術に優れたリニアモータを開発できたが, この結果からもわかる様に,鉄損がコンプレッサ効率を 著しく妨げていることがわかり,これを回避できれば,大 車,機械工作機,半導体製造装置等の分野を目指した用途 開発に重点を置き,開発に取り組む所存である。 幅な省エネ効果が期待できる。 3.2 当社の省エネタイプのボイスコイルモータについ て(特許出願済) 図 6 に示すように,当社の構造は磁石とコイルを多極と することにより,コイルから発生する磁束を相殺し,ヨー ク内に発生する渦電流を解消できる点にある。 少し詳細に説明すると,隣接する磁石の極性は,相互に 逆極性になっており,このため,対応するコイルから発生 する磁束の方向も相互に逆方向となる。これにより,各コ ばね コンプレッサ部 冷凍部 銅網積層部 Heガス 第1磁石 S N N S 第2磁石 第2コイル 第1コイル 機械ばね ピストン S N N S 図 6 当社の省エネタイプのボイスコイルモータの概略 森山 毅(もりやま つよし) コミュニケーション・デバイス事業本部 サーボ事業推進室 技術開発グループ長 1984 年入社。 サーボ機器製品の開発,製造に従事。
© Copyright 2026 Paperzz