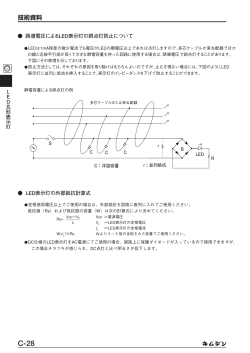
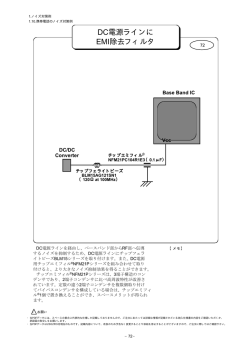
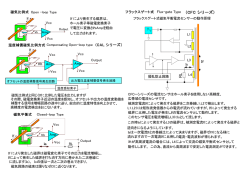
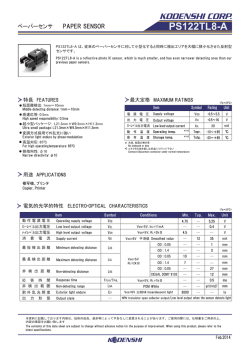
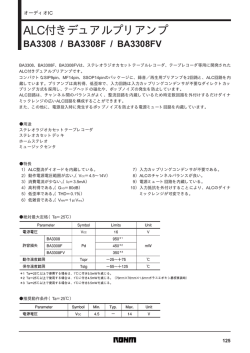
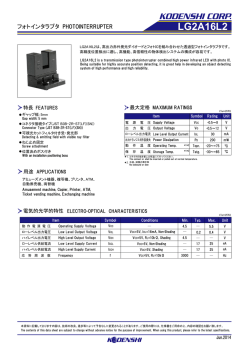
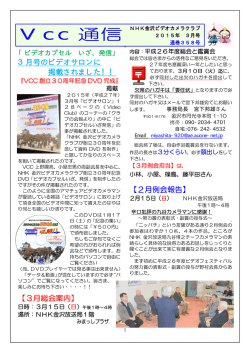
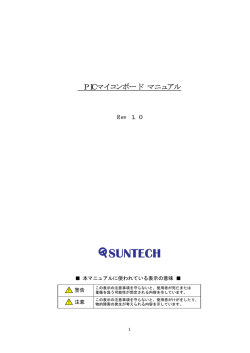
Volume Forty-Six アーティクル デザインショーケース Li+パルス充電器の充電効率とセル劣化 3 クロックデータリカバリ回路における高精度リファレンスクロックの使用 8 システムの信頼性を高めるウォッチドッグの正しい選び方 11 非安定化電源で使うパルス充電器の設計方法 15 ダラスセミコンダクタ製ディレイラインの作動原理 17 KEITHLEY MODEL 2304 6.0V, 750mA (SOURCE) B A 150Ω 100Ω KEITHLEY MODEL 2304 (LOAD) 4.7kΩ CC VCH PC VIN 5.1V VDD 100Ω 1400mAh Li-POLYMER CELL 1kΩ DQ Li+ PROTECTOR DS2770 0.1µF SNS 0.1µF VSS RS DS2770パルス充電器は、+25℃で500回の充放電のサイクル後、リニア充電器に比べ充電スピードを16%高め、セルの省化を4.6%低下させます。 となるだけです。充電ソースは、低電圧の非安定化電源 です(1セル用では、5V〜6Vのものが用いられます)。 充電電流は、ハイサイドに設置した低インピーダンスの 検出抵抗(内蔵あるいは外付け)により、正確に計測しま す。充電器は、図1に外付けP-FETとして描かれている パスエレメントの制御を通じて、セルの電圧や電流を調 節します。図1に、リニア充電回路とLi+ CCCV充電プロ ファイルの典型例を示します。 Li+パルス充電器の 充電効率と セル劣化 パルス充電トポロジーは、単純で低コスト、小型、外付け 部品点数が少ないなど、リニア充電トポロジーが持つ 利点の大半を備えています。リニア充電器よりも優れて いる点は、熱が発生するのが充電器内部ではなく、ACアダ プタであるということです。一方、Li+セルのパルス充電 では、セル電圧が最大電圧近くまで上昇しているパルス 充電領域においても、定電流領域と同じ充電電流にさら されるため劣化が速いはずだと言われています。この記 事では、まず、パルス充電とリニア(CCCV)充電の概要 を紹介し、次に、CCCV充電器とLi+パルス充電機能を 持つDS2770について、充電時間と充電容量、セル劣化 の比較を行います。 充電器は、まず、セルの充電前チェックを行い、充電が 可能な状態であること、また、当該セルに対して急速 充電を安全に行えることを確認します。セル電圧が2.5V 程度以下の場合、1C充電によってセルに不可逆的な ダメージが発生する危険があります。そのような場合 には、まず、C/15でゆっくりとトリクル充電を行い、 セル電圧を充電開始可能電圧まで上昇させます。 セルが充電可能となったら、FETを制御し、定電流充電 を行います。安全タイマを持つ場合は、急速充電開始時 にタイマをスタートさせます。リニア充電器の欠点は、 電圧が低いセルに対する急速充電時に、最も強く現れ ま す 。 非 安 定 化 電 源 の 電 圧 が 5V で 、 1C充 電 中 の 750mAhセルの電圧が3Vだとすると、FETは1.5Wの熱 を放散しなければなりません。図1に示す充電プロファ イルは、かなり簡略したもので、定電流充電時の電圧上 昇は直線的ではありません。いずれにしても、セル電圧 が3Vである時間は短く、定電流充電によりバッテリ電圧 リニア充電 リニア充電は、リチウムイオンバッテリやリチウムポリ マーバッテリの充電によく使われる方法で、充電電流は、 通常、1.5A以下です。充電器は低コストで低ノイズ、 小型で、外付け部品も安価で小型なものがごく少数必要 IBAT UNREGULATED CHARGE SOURCE RS LINEAR CHARGER VBAT 4.2V VBAT 1C VBAT IBAT 2.5V IBAT C/10 C/15 PREQUALIFICATION CONSTANT CURRENT PULSED CURRENT 図1. リニア充電プロファイルでは、定電流充電の後に定電圧充電によるトップオフを行います。 3 が上昇するにつれ、FETにおける放熱量は下がります。 充電器は、セル電圧が定電圧充電開始電圧(V CV)になる まで定電流を供給します。VCVは、通常、4.1Vか4.2V です。 を行います。充電ソース自体が電流制限されているため、 FETにおける電圧降下は最小限に抑えられ、バッテリ パック内部における放熱はほとんどありません。電流制 限に伴う損失は、トランスの結合損失か2次側のI2Rで 定電圧充電開始電圧に達したとき、セルの充電は、40% 〜70%程度終了しています。この後は、トップオフ 充電するために、定電圧(V CV )を供給するようにFETを 制御します。この充電サイクルでは、充電電流は時間と ともに減少します。定電圧充電は、充電電流の計測値が C/10あるいはC/15に低下するまで、あるいは、安全 タイマが作動するまで行います。 あり、すべて、ACアダプタ内部で発生します。 セル電圧が VCV に達すると、パルスモードに入ります。 このとき、セルの充電状態は、リニア充電器における定 電流領域の終了時と同じで、満充電の40%〜70%程度 となっており、パルス充電領域はセルのトップオフを行 います。セル電圧がVCVに達した後、充電器は、tPULSE だけFETを導通状態にします。次に、パスエレメントを オフとし、充電電流を遮断するとともに充電ソースを 開放電圧にします。この状態で、セル電圧がVCVまで低 下するのを待ちます。そして、もう一度、パスエレメン トをtPULSE だけオンにしてからオフにし、セル電圧が パルス充電 パルス充電は、CCCV方法とよく似ています。異なる 点は、充電ソースと充電終了方法です。パルス充電器は、 リニア充電器と同じ利点を持つだけでなく、バッテリ パック内部で熱を放散させる必要がありません。必要な 充電ソースは、電流制限付き非安定化電源です。図2は、 パルス充電回路とLi+充電プロファイルの典型例を示し ます。 VCVまで低下するのを待ちます。この動作を、パルス充電 のデューティサイクル[t PULSE/(t PULSE+t OFF)]が5%〜 10%に低下するまで繰り返します。こうしてパルス充電 が終了したとき、セルはほぼ満充電の状態になります。 パルス充電トポロジーでは、必要な充電速度に等しい 電流制限値を持つソースが必要です。パルス充電器の中 には、充電ソースのチェックを行う低インピーダンス検 出抵抗を持ち、電流制限値が高すぎる場合には急速充電 を行わないものもあります。リニア充電器と異なり、 パルス充電トポロジーでは電流の制御を行わないため、 充電ソースのチェックしか、電流制限用検出抵抗の使い 道はありません。パルス充電器の中には、電流検出機能 を持っておらず、充電ソースの仕様が不適切な場合には、 リニア充電器と同じように、パルス充電器も、まず、 充電が可能な状態であることを確認します。これは、通常、 バッテリよりも充電ソースの電圧が高いかどうかで判別 します。次に、セルの予備充電を行い、充電開始可能電 圧以下であれば、小電流でトリクル充電を行います。 予備充電が完了すると、安全タイマをスタートさせると ともに、外付けFETあるいはPNPトランジスタをオン 状態にして、充電ソースの制限電流でセルの定電流充電 IBAT REGULATED AND CURRENT-LIMITED CHARGE SOURCE VBAT PULSE CHARGER 4.2V IBAT 1C tPULSE VBAT VBAT IBAT 2.5V tOFF C/10 C/15 PREQUALIFICATION CONSTANT CURRENT PULSED CURRENT 図2. パルス充電プロファイルでは、定電流領域と同じ充電電流のパルスでセルのトップオフを行います。 4 KEITHLEY MODEL 2304 6.0V, 750mA (SOURCE) B A 150Ω 100Ω KEITHLEY MODEL 2304 (LOAD) 4.7kΩ CC VCH VIN 5.1V VDD 100Ω PC 1400mAh Li-POLYMER CELL 1kΩ DQ Li+ PROTECTOR DS2770 0.1µF SNS 0.1µF VSS RS 図3. DS2770を用いたパルス充電器及びクーロンカウンタの、リニア及びパルス充電の実験。 ます。DS2770は、セル電圧が4.2Vとなるまでこの 電流制限値でセルの充電を行うと、パルスモードに移行 します。このときのパルス幅(tPULSE)は875ms(typ)とし、 バッテリパックを切り離すLi+保護回路を採用している ものもあります。 パルス充電プロファイルの問題点としてよく指摘される のは、セル電圧がVCVに達した後も、tPULSE(1秒以下の tPULSE + tOFF = 14s(typ)、つまり、デューティサイクル が6.25%となった時点で充電終了としました。DS2770 の詳細な仕様は、データシートをご参照ください。 ことが多い)幅のパルスの間、セルに大きな充電電流が 流れるため、セルの劣化が早まるということです。図2 に示すように、tPULSEの間、セル電圧がVCVを超えては 戻るという操作を、デューティサイクルが5%〜10%に 低下するまで何回も繰り返すことになります。今までは、 セルが劣化するはずだとしてパルス充電を避けることが 多かったのですが、本当に、ピーク充電電流が等しい CCCV プ ロ フ ァ イ ル よ り も セ ル の 劣 化 が 激 し い の で しょうか? 次のセクションでは、特性評価手法を紹介す るとともに、パルス充電器についてよく指摘されるこの 問題に対して、明確な回答を示します。 リニア充電サイクルでは、定電流領域において、6.0Vで 750mAを供給できるように設定した電源を、DS2770 のパルス充電器をバイパスするため、点Bに接続します。 DS2770は、定電流領域ではセルの電圧を、定電圧領域 ではセルの電流を計測します。電圧測定値が4.2Vに達し たら、電源の設定を変更し、4.2Vの定電圧を点Bに供給 します。DS2770が計測する充電電流が50mAに低下し た時点で満充電であると判断し、充電を終了しました。 放電サイクルの負荷シミュレーション用に、Keithley 2304電源をもう一台用意しました。放電サイクルは、 +25℃で同一プロファイルとし、セルの充電モードによ る違いはありません。負荷電流は、まず750mA DCとし、 セル電圧が3.4Vに低下したら250mA DCに落とします。 もう一度3.4Vまでセル電圧が低下したら、負荷電流を 50mAまで落とし、この負荷でセル電圧が3.4Vまで低下 したら完全放電だと判断します。放電の開始時と終了時 におけるDS2770の電流累積レジスタ(ACR)の差を、 各充電サイクルにおけるセルの実効容量だとしました。 充電時間とセル劣化の実験 実験では、パルス充電器およびクーロンカウンタとして、 Li+パルス充電機能を持つDS2770バッテリモニタ充電 コントローラを使用しました。クーロンカウントにより、 充放電の繰り返しによるセル容量の低下を計測します。 図3は、実験に使用した回路です。 充電ソースには、Keithley Model 2304電源を使用しま した。パルスモードサイクルでは、開放電圧を6.0V、 電流制限値を750mAとした電源を、図3の点Aに接続し 5 を完了しました。これらの結果から、パルスモード充電 器は、リニア充電器と比較して充電速度は大幅に速く、 また、充電されたセルの実効容量には違いがないことが 分かります。 温度による充電時間と実効容量の変化 1400mAhリ チ ウ ム ポ リ マ ー セ ル の 新 品 を 用 い て 、 DS2770パルス充電器とディスクリートのリニア充電器 による充電時間が温度によってどのように変化するかを 調べました。新品セルの容量は、数回の充放電サイクル で大きく変化するため、計測前に10回の充放電サイク ルを加え、セルの「慣らし」を行いました。 リニア充電器とパルス充電器による セル劣化の比較 パルス充電器の方が充電時間の短いことが確認されたの で、次は、リニア充電器と比較してセルの劣化が速いか どうかの確認を行います。1400mAhリチウムポリマー セルの新品2個に対し、10回の充電/放電サイクルを加 えて慣らしを行います。次に、片方のセルにはリニアプ ロファイルで、もう一方のセルにはDS2770で、500回 の充放電サイクルを+25℃で加えます。放電プロファ イルは、充電時間の比較実験と同じものを使用しました。 セル劣化を示す実効容量の低下は、各放電サイクルの前後 におけるDS2770のACR値の差から求めました。図6に、 実験結果を、1回目の放電における実効容量に対する パーセントで示します。 実験では、まず、完全放電したセルに対し、+40℃で、 DS2770パルス充電器による充電を行い、充電の開始時刻 と終了時刻を記録します(パソコン内蔵の時計を使用)。 次に、試験チャンバー内を+25℃に戻し、前述のプロ ファイルと放電終了基準を用いて完全放電します。放電 の開始時と終了時におけるACRの差を、当該温度・当該 充電プロファイルにおけるセルの実効容量として記録し ます。次に、+40℃で、リニアプロファイルによって セルの充電を行い、充電時間を記録します。もう一度、 +25℃で放電を行い、ACRの差を記録します。同じ実験を、 0℃〜+40℃まで、5℃刻みの充電温度で繰り返した 結果が、図4と図5です。 この実験から、セルの劣化は、リニア充電よりもパルス 充電の方が少ないことが証明されました。CCCVプロ ファイルによる充放電を繰り返したセルの実効容量は、 パルス充電器による+25℃で500回の充放電を繰り返し たセルの実効容量よりも、4.6%少なかったのです。 温度が等しければ、実効容量に違いはありません。ただし、 高温では、パルス充電器の方がリニア充電器よりも若干 よい結果となりました。一方、充電時間には大きな差が あります。低温では、パルスモードトップオフよりも定 電圧トップオフの方が37%も充電時間が長くなりま した。+40℃でも、パルス充電器の方が14%早く充電 250 DS2770 (PULSED) LINEAR CHARGING TIME (MIN) 200 150 100 50 0 0 5 10 20 15 25 30 35 CHARGING TEMPERATURE (°C) 図4. パルス充電時間は温度に関わらずほぼ一定で、+25℃では、リニア充電時間よりも16%も短い結果になりました。 6 40 1350 DS2770 (PULSED) LINEAR USABLE BATTERY CAPACITY (mAh) 1300 1250 1200 1150 1100 1050 1000 0 10 5 20 15 25 35 30 40 CHARGING TEMPERATURE (°C) 図5. どの温度でも、パルス充電器とリニア充電器で、実効容量に違いはほとんどありません。 電力放散はバッテリパックではなく充電ソースで行われ 結論 るようになります。パルス充電プロファイルでは、電圧 が VCVとなったセルに対し、1C充電電流をパルスで流す Li+バッテリ用のリニア充電器とパルス充電器は、単純 で低コスト、小型、外付け部品点数が少ないなど、利点 の大半が共通しています。この記事では、まず、各トポ ロジーの概要を説明するとともに、既知の欠点だと信じ られていることを紹介しました。リニア充電器の場合、 バッテリパックに組み込まれたパスエレメントで電力を 放散するため、その結果生じる熱量を処理できるように パックを設計する必要があります。一方、パルス充電器は、 電流制限付の充電ソースが必要になりますが、その結果、 PULSED CELL 結果、セルが劣化すると言われています。DS2770バッ テリモニタ充電コントローラを使用した実験により、 1)+25℃における充電速度はパルス充電器がリニア充電 器 よ り も 16% 速 く 、 実 効 容 量 は ほ ぼ 等 し い 、 ま た 、 2) +25℃で充電/放電サイクルを500回繰り返したと ころ、セルの劣化は、リニア充電器よりもパルス充電器 の方が4.6%少ないという結果が得られました。 LINEAR CELL USABLE CAPACITY RELATIVE TO NEW CELL 100.00% 97.50% 95.00% 92.50% 90.00% 87.50% 85.00% 0 100 200 300 400 CHARGE/DISCHARGE CYCLES 図6. 500回の充電/放電サイクル後の実効容量は、リニア充電の方がパルス充電よりも4.6%少ないという結果になりました。 7 500 にデータを変換する製品をシリアライザ/デシリアライザ 「 ( サーデス」と省略することもあります)といいます。この ような製品には、シリアルデータストリームをデシリア ライズするCDRブロックが組み込まれています。 クロックデータ リカバリ回路における 高精度リファレンス クロックの使用 この記事では、高速シリアル通信リンクアプリケーション を構成するために必要なCDRのコンポーネントブロック を検討します。まず、典型的な高速シリアル通信リンク の例を紹介し、リンクでデータがどのように変換され、 また、回復されるのかを説明します。その上で、さまざ まなCDRスキームを紹介し、一般的なCDRトポロジーと どこが違うかを解説します。また、基準発信器がリンク の送信側と受信側の両方で果たす役割に、特に焦点を 当てます。 さまざまなクロックデータリカバリ(CDR)アプリケー ションがテレコミュニケーションや光トランシーバ、 データ・ストレージエリアネットワーク、無線機器など の分野で利用されています。今後、より広帯域に対応し た設計が求められるとともに、スペクトル帯域が割り当 てられ、その利用も増えることから、CDR技術の重要性 はますます高まるものと考えられます。また、システム やボードのインタフェースも、パラレルからシリアルに 移行しつつあります。 高速シリアル通信における クロックデータリカバリ 近年、広がりつつあるバックプレーンのパラレルバス幅に 対応するとともに、レシーバ側におけるクロックとデータ のスキューを管理するため、CDR技術の採用が増えてい ます。また、このような信号のルーティングには困難が 伴います。基板スペースと処理能力を消費することと、 信号とライン終端処理の管理にマルチレイヤルーティン グ方式が必要となることがその理由です。高ビット幅 データバスから発生するEMIも心配されます。 b1 b2 b3 b4 SERIALIZER 通信技術と電気信号処理技術が進歩し、FR-4やバック プレーン、光媒体、無線媒体を通じて数ギガビットもの 電気信号を送るようになったため、CDR技術が非常に重 要となりました。送信前にクロックとデータを結合する という通信手法は以前からありました。この方法では、 クロック信号とデータ信号が必ず同時に到着します。問 題は、レシーバ側でクロックとデータをどのように分離 するかということです。これを行うのが、CDR回路です。 パラレルからシリアル、あるいはシリアルからパラレル TRANSMITTER CHANNEL bn RECEIVER DESERIALIZER 図1は、高速シリアル通信リンクの基本ダイアグラムです。 送信側シリアライザに、パラレルデータ(ビット b1、 b2、b3..bn)が周波数ftで到達します。データは、シリア ライザ内部でパラレルフォーマットからシリアルフォー マットに変換されます。生成されるシリアルビットスト リームのビットレートは、n x ft以上になります(nはパラ レルデータビットの総数)。データのエンコードにより、 生成する信号の周波数(ビットレート)がftよりも高くなる 場合もあります。データのエンコードを行うのは、チャ ネルが要求するBER(ビットエラーレート)レベルを満足 するためであったり、受信側CDRに十分な遷移情報を提供 する必要があったりするときです。チャネルエンコード にはリードソロモン符号によるFEC(前方誤り訂正)などが、 受信側CDRに対する遷移情報の生成には8B10Bエン コードなどが使われます。こうして生成したシリアル データは、チャネルへの送信準備が整えばレシーバに送 られ、デシリアライザに到達します。通信媒体が光ファ イバであっても大気であっても、また、バックプレーン であっても、基本的な通信ブロックは同じです。 b1 b2 b3 b4 bn 図1. クロックデータリカバリが高速シリアル通信リンクの基礎となります。 8 LPF PD 補償を行う場合もあります。SONETベースのアプリ ケーションでは、このリファレンスがある階層レベルに 該当する場合があります(階層レベルの3、3E、あるい は4)。 VCO VREF 受信側では、クロックとデータの両方を回復する必要が あるため、CDRのPLLブロックは構成が若干異ったもの となります。図3に示すように、PLLブロックに入るク ロック/データ信号は、まず、バッファを通過し、そこ で2つのパスに分岐します。片方のパスは、データ復号 (DEC)ブロックで、もう一方は、クロックリカバリブ ロックです。クロックリカバリブロックは、図2のPLL ブロックから1/nブロックを省いたものです。回復され たクロックは、VCOから出力され、DECのサンプリング 用入力として、位相/周波数検出器へのフィードバック 信号として、また、下流機器のシステムタイミングとし て利用されます。図1の場合、回復したクロックをパラ レルクロック周波数まで分周し、デシリアライザブロッ クをドライブします。 1/n 図2. クロック逓倍アプリケーションの中核はPLLです。 CDRアプリケーションでは、タイミング(クロッキング) が重要です。システムを設計する段階で、パラレルフォー マットからシリアルフォーマットに変換した上で、チャ ネル経由で送信し、チャネルによる歪みの乗った信号を 受信するという一連のデータ処理をどのように行うかを 定めます。高いSN比とBER性能を実現するためには、 設計によって発生するデータ信号の劣化を最小限に抑える 必要があります。例えば、バックプレーンにおけるデジ タル伝送スキームでは、システムのジッタ性能が特に重要 です。これは、高速電気信号がさまざまなパス長を流れ ていく結果(FR-4とバックプレーン)、信号レベルの歪み と時間的な歪みが発生し、信号が劣化するからです。 クロックデータリカバリにおける基準発信器 ダイアグラムに示す基準発信器の例から分かるように、 発信器入力には電圧制御がかけられています。この電圧 制御は、LPF段で行います。図3に示すようなケース では、ループ発信器として、VCOやVCXO(電圧制御水晶 発信器)を使うのが普通です。その役割から明らかな ように、ループ発信器は、入力されるクロック/データの 周波数変動に追随できなければなりません。また、この ループ発信器のクロックは、CDR(デシリアライザ)下流 にある他のコンポーネントにも供給されます。これを 実現するのが、VCOやVCXOの電圧制御入力を駆動する LPF出力です。 クロックデータリカバリの中核は、PLL(位相ロック ループ)を使用した回路で、ディジタルで構成できるこ ともあります。図2に示す基本的なPLLブロックダイア グラムが、図1の通信リンクにある送信側シリアライザ に使われます。このPLLブロックは、位相/周波数検出器 (PD)とフィルタ(LPF)、電圧制御発信器(VCO)、分周回 路(1/n)で構成されます。分周回路の役割は、比較用周 波数をPDに提供することです。こうすることにより、 VCO出力の位相を、安定したリファレンス入力、VREFに 同期させることができます。PLLブロックでは、基準周 波数を固定倍率(n)で逓倍し、VCOの固有周波数を得 ます。VREF には、普通、安定性と精度、位相対ノイズ 特性に優れた水晶を使った回路を用います。また、アプ リケーションやシステムの要件に応じ、温度補償や電圧 通信や無線、データ通信などで使用するCDRアプリケー ションでは、データとクロックが結合した受信信号の周 波数特性は比較的安定しています。これは、送信側のク ロックが一定レベル以上の精度と安定度を持つと考えら れるからです。受信側の設計では、精度/安定度の最小 DATAout DEC CLK/DATAin PD LPF 図3. CDR回路では、基本PLLブロックの変化形を使用します。 9 VCO CLKrec 値や最大値に対して余裕を持たせます。例えば、送信側 クロック周波数が公称周波数から±50ppm変動する可能 性がある場合、受信側クロックは、少なくとも±50ppm の周波数調整が可能でなければなりません。しかし、 設計時には、±50ppmよりも若干広い周波数調整を考え ておくべきです。このように周波数調整機能に余裕があ れば、通信の混乱やチャネルによって信号周波数に歪み が生じても対応できるからです。 を何千回も行う必要があります。VCXOとロック検出回 路を追加すれば、VCOの動作周波数が固定され、スター トアップ時のロック時間を事前に予測できるようになり ます。もう一つの利点は、クロック/データ入力が長時 間に渡り失われたとき、VCXOが役に立つという点です。 クロック/データ信号が失われたとき、高安定の水晶 発振器(V REF )を基準として、クロック/データ信号が 信号消失(LOS)から回復するまでホールドオーバを供給 し続けられるのです。ホールドオーバとは、リファレン スクロックの仕様の一つで、ある時間、ある精度を保つ 能力を表します(例えば、24時間にわたり±4.6ppm など)。 PLL回路は静的状態に向かおうとしても、つまり、周波 数ロックをかけようとしても、電圧制御入力の変化速度 が速すぎるということもあり得ます。PLLがロック状態 を保持できる最大レートは、LPFの帯域幅によって決ま ります。最終的には、受信側VCO(またはVCXO)が、 変動に追随し、クロックを再現できなければなりません。 結論 さまざまなソリューションが、通信アプリケーションに おけるクロックデータリカバリ/リタイミング、シリア ライザ/デシリアライザ、クロック発生器、TCXOで使わ れています。このようなデバイスを使えば、10MHz〜 10GHzもの周波数で使える回路を開発したり、GSMか らOC-192、または、それ以上のアプリケーションをサ ポートしたりすることができます。広帯域化が進む中、 CDR技術は、今後ますます、テレコミュニケーションや 光トランシーバー、データ・ストレージエリアネット ワーク、無線機器などの分野で重要なものとなるで しょう。 データ/クロック入力がない間も、CDRは、一定時間、 下流の通信コンポーネント(つまりデシリアライザ)に基 準信号を供給しなければなりません。 アプリケーションによっては、VCOとVCXOを組み合わ せる場合もあります。図4に示すようなVCOとVCXOを 組み合わせた構成は、通常のCDRにはない利点を2つ持ち ます。一つは、VCXOが追加されたことにより、クロック/ データ信号周波数に対するVCO周波数の追随速度が向上 することです。VCXO周波数は、受信するクロック周波 数のレンジに合わせて選びます。例えば、広帯域VCOを データストリームにロックするためには、サンプリング DATAout DEC CLK/DATAin PD VCO LOCK DETECT MUX LPF PD VREF 図4. 基本CDRブロックの改良により、クロック/データストリーム入力に対するロック性能を高めることができます。 10 CLKrec か立ち下がりエッジが入力されると、カウンタがクリア されます。WDIピンは、ソフトウェアでトグルされる プロセッサのI/Oピンに接続します(図1)。ウォッチドッ グカウンタをクリアするコマンドは、メインプログラム ループに組み込んでおきます(図2)。ウォッチドッグが クリアされないとリセットが発生し、プログラムの実行 がアドレス0000(プログラムの最初)に戻ります。なお、 メインループの実行時間は、計算が難しいのが普通です。 システムへの入力にもよりますが、さまざまなサブルー チンが呼ばれるかも知れないからです。そのため、ウォッ チドッグタイムアウトを、実測ループ時間の最大値ある いは最長の計算値よりも長くとるという方法がよくとら れます。図3は、正常動作時のウォッチドッグとリセット 信号の関係です(タイムアウト期間内にウォッチドッグ システムの信頼性を 高めるウォッチドッグ の正しい選び方 さまざまなマイクロプロセッサ(µP)が低コストで利用で きるようになったこともあり、以前は専用ハードウェア によって実現されていた回路機能がソフトウェアによっ て構成されるようになりました。ソフトウェアは、最も 低コストでフレキシブルな解決方法であることが多いので すが、同時に、システムの信頼性を確保するために、設計 段階で十分な注意を払う必要のある方法でもあります。 この世に間違いのないプログラムなどというものは存在 せず、十分なテストをしてもコード1,000行あたり1つ くらいの間違いは残るものです。つまり、10,000行程 度の典型的な制御ソフトウェアには、少なくとも10箇所 ほどのバグがあると考えるべきなのです。 がクリアされます)。図4のようにウォッチドッグカウンタ がタイムアウトに達するとリセットが発生します。業界 標準のウォッチドッグ回路のタイムアウトは、100ms から2sの範囲です。もちろん、もっと広範囲(30msから 分単位まで)をカバーできる調整可能なウォッチドッグ やカスタムウォッチドッグもあります。使用するウォッチ ドッグに対してメインループの実行時間が長すぎる場合 は、メインループの複数箇所にウォッチドッグトグル コマンドを実装するか、タイムアウトの長いデバイスに 交換することになります。 システムをクラッシュさせるようなエラーをデスクトップ アプリケーションが発生させても、あまり大きな問題に はなりません。ユーザがシステムを再起動できるし、 データの損失も最小限に抑えられるからです。しかし、 工業用制御ソフトウェアでは、人間が操作することなく、 コードエラーからシステムが復帰できる必要があります。 この機能が特に重視される2つの分野は、サーバや電話 システム、製造ラインなどの常時稼動が必要とされるシ ステムと、自動車や医療機器、工業用制御、ロボット、 自動ドアなどのクラッシュによって人的被害が発生する 危険があり、高信頼性が必要とされるシステムです。 これほど厳しい条件が不要な分野でも、リセットスイッチ を押したり電源を入れ直したりという操作をユーザがす ることなく、システムがクラッシュから復帰できるのは 望ましいことです。デバイスがエラーから自動的に復帰 できれば、デバイス内部で問題が発生したこと自体を ユーザが知ることがないため、デバイスが高品質である という印象を与えることができます。このようにシステム の信頼性を高める簡単で有効な方法は、ウォッチドッグ を使用することです。 WATCHDOG TIMER I/O PIN µC RESET RESET GENERATOR 図1. リセットしない場合は、µPからWDIピンにパルスを送り、ウォッチ ドッグタイマをクリアします。 システムが無限ループに陥らないようにする方法と して、メインループの最初で当該I/Oピンをハイにセッ トし、メインループ内の他のセクションでローにセット するという方法があります。こうすれば、メインループの 初期に無限ループに入ってしまっても、WDIがハイ状態 のままなのでウォッチドッグのタイムアウトが発生し、 システムがリセットされます(図5)。図2のようにロー・ ハイ・ローのパルスを使用しても、ウォッチドッグの クリアはできますが、システムがハングアップから抜け 出せなくなります。モニタリングが必要な複数のタスク を処理するプログラムでは、もっと高度なスキームが必 ウォッチドッグとは ウォッチドッグとは、ウォッチドッグタイムアウト期間 内にクリアする必要があるカウンタのことです。クリア されない場合、ウォッチドッグは、システムを再起動す るリセット信号を送出するか、ノンマスカブル割込 (NMI)を発行してエラー回復ルーチンを実行させます。 ウォッチドッグは、ほとんどがエッジトリガ型です。 つまり、ウォッチドッグ入力(WDI)に立ち上がりエッジ 要になります。それぞれのタスクでフラグをセットし、 全フラグがセットされていればウォッチドッグのトグル 11 を行うようにするのです。この場合、ウォッチドッグタ イムアウト期間内に全タスクの処理が終わらなければな りません。図2も図5も、実際のプログラムと比較してあ まりに簡単だと感じられるかもしれませんが、コンセプ トはお分かりいただけるはずです。複雑なシステムでは、 メモリリークやスタックオーバフローなどの問題も モニタリングする必要があります。今回はここまで踏み 込んだ解説をしませんが、このような処理は、通常、 適切な設計手順に従い、注意深くコードの検証を行い、 特殊なソフトウェアツールを使えば行うことができます。 内蔵ウォッチドッグと外部ウォッチドッグ 多くのµPは、ソフトウェアによってディセーブルできる プログラマブルウォッチドッグを内蔵しています。この ような内蔵ウォッチドッグはコードエラーの影響を受け るため、独立した外部ウォッチドッグほどの保護機能が 得られません。安全性が重視されるアプリケーション WATCHDOG COUNTER WATCHDOG TIMEOUT ADDRESS 0000 RESET WATCHDOG INPUT WDI STARTUP ROUTINE CLEARS RAM AND CONFIGURES ALL PORTS TO INPUTS WATCHDOG TIMEOUT RESET RESET TIMEOUT START MAIN LOOP TOGGLE WATCHDOG SUBROUTINE 1 図4. ウォッチドッグカウンタがタイムアウト値に達するとリセットが 発生します。 WDI CONDITIONAL BRANCH 1 RESET SUBROUTINE 2 STARTUP ROUTINE CLEARS RAM AND CONFIGURES ALL PORTS TO INPUTS CONDITIONAL BRANCH 2 START MAIN LOOP END MAIN LOOP SET WDI HIGH SUBROUTINE 1 図2. メインループでWDI信号を生成する典型的なプログラムフロー例です。 WDI CONDITIONAL BRANCH 1 SET WDI LOW WDI WDI SUBROUTINE 2 CONDITIONAL BRANCH 2 t END MAIN LOOP RESET t 図5. ウォッチドッグトグルコマンドを2つに分けるという改良を施した プログラムフロー例です。それぞれのトグルコマンドは、WDIピン に立ち上がりエッジあるいは立ち下がりエッジを出力します。 このようにすれば、無限ループに陥ることを防止できます。 図3. ウォッチドッグタイムアウト期間中にWDIピンがトグルされればリ セットは発生しません。 12 • リセット電圧は、分圧抵抗R1/R2によって決まります。 (自動ドアや医療機器、ロボットなど)では、内蔵ウォッ チドッグは使えません。規制当局により、独立した外部 ウォッチドッグの採用が義務づけられているのです。 つまり、重大なシステム障害のリスクを低減するためには、 外部ウォッチドッグを使った方がいいのです。 • リセットタイムアウト期間は、リセットタイムアウト 設定用コンデンサ(CSRT)によって決まります。 • ウォッチドッグタイムアウト期間は、ウォッチドッグ タイムアウト設定用コンデンサ(CSWT)によって決ま ります。 ウォッチドッグとリセットを組み合わせた シンプルな製品 図8は、ウォッチドッグタイムアウト期間とCSWT(100pF〜 100nF)の関係を示すグラフです。このようにウォッチ ドッグタイムアウトを広い範囲で自由に設定できる ため、アプリケーションに適したソリューションの構築 が可能になります。MAX6301〜MAX6304ファミリは、 機能的にはMAX6746〜MAX6753ファミリと同じで すが、パッケージがSOPとDIPになります。 ウォッチドッグタイムアウトが発生すると普通はシステ ムがリセットされるため、ウォッチドッグは、プロセッ サへの電源電圧の監視も行うµPのリセットと統合される のが普通です。このとき、µPのリセットは、ウォッチ ドッグあるいは電圧低下により行われます。図6に示す MAX823〜MAX825ファミリは、これら2つの機能を 組み合わせた製品で、標準リセット電圧に加えて、公称 ウォッチドッグタイムアウト1つとリセットタイムアウ ト1つを持ち、消費電流は6µAと低く抑えられています。 パッケージは超小型のSC70です。 VIN MAX6749 MAX4751 VCC R1 RESET IN R2 VCC RESET GENERATOR VCC 1.25V MAX823 MAX824 MAX825 RESET RESET (MAX824/ MAX825 ONLY) I/O WDS CSWT WATCHDOG TRANSITION DETECTOR RESET WDI SWT WDS = 0 FOR NORMAL MODE WDS = VCC FOR EXTENDED MODE MR (MAX823/ MAX825 ONLY) WDI (MAX823/ MAX824 ONLY) µP MAX6748 MAX6749 MAX6750 RESET GND MAX6751 SRT CSRT VCC WATCHDOG TIMER 図7. MAX6346〜MAX6353容量可変ウォッチドッグファミリの回路例 です。 GND WATCHDOG TIMEOUT PERIOD (ms) 100,000 図6. MAX823〜MAX825ファミリでは、ウォッチドッグとリセットと いうよく使われる機能が統合されています。 出荷時プリセット型ウォッチドッグファミリ MAX6316〜MAX6322ファミリは、26種類のリセット 電圧、4つの公称ウォッチドッグタイムアウト期間、4つ の公称リセットタイムアウト期間、4種類の出力形式の 組み合わせが自由に選べる出荷時プリセット型の製品で す(表1参照)。 MAX6746–MAX6751 10,000 EXTENDED MODE 1000 100 NORMAL MODE 10 1 0.1 100 1000 10,000 100,000 CSWT (pF) 容量可変ウォッチドッグ 図8. ウォッチドッグタイムアウト期間を広い範囲で調節可能です。 ウォッチドッグタイムアウトをフレキシブルに調整したい 場合は、調整が可能な回路を使用します。MAX6746〜 MAX6753ファミリでは、リセット電圧は出荷時プリセッ トあるいは抵抗分割でプログラマブルとなり、ウォッチ ドッグタイムアウト期間とリセットタイムアウト期間は 外付けコンデンサによる設定が行えます。図7は回路例 です。 長いスタートアップ/タイムアウトに対応できる ピン選択式ウォッチドッグ スタートアップルーチンに時間がかかる場合は(図2参 照)、スタートアップルーチン用の長いタイムアウト期 間と通常動作用の短いタイムアウト期間を持つウォッチ ドッグを採用すべきです。MAX6369〜MAX6374ファ 13 ミリは、ピン選択により、スタートアップ遅延は 200ms〜60sの範囲で、ウォッチドッグタイムアウト 期間は30ms〜60sの範囲で設定することができます。 スタートアップルーチンが特に長い場合にも対応できる ように、第1エッジによるウォッチドッグ起動機能を 持ったデバイスもあります。このようなデバイスでは、 スタートアップにはウォッチドッグがディセーブルされ ており、µPの当該I/Oピンからの第1エッジを受け取る とウォッチドッグを起動します。 をクリアするためには設定されたウィンドウ時間内でパルス が発生しなければならないデバイスです。有効パルスが発 生する期間は、例えば、最終パルスからわずか1.5ms後、 あるいは最終パルスから10ms後までがあり得ます(レンジ については表1を参照のこと)。MAX6323/MAX6324なら、 ループ内にウォッチドッグクリアコマンドを持たせれば、 高速パルストレインが発生して、その無限ループからシス テムを回復させることが可能です。通常のウォッチドッグ では、このようなパルスが発生するとクリアされ、リセット が発生することはありません。しかし、ウィンドウ型ウォッ チドッグでは、ウォッチドッグパルス間に一定以上の遅延 時間がなければならないので、このような事態を避けるこ とができます。ウィンドウ型ウォッチドッグデバイスが適 しているアプリケーションとしては、アンチロックブレーキ システムなどの自動車用回路や、高い安全性が求められる 工業用アプリケーションや医療用アプリケーション、常時駆 動が非常に重要なアプリケーションなどが考えられます。 複数電圧に対応したウォッチドッグ デュアル電源を使うシステムでは、MAX6358〜MAX6360 ファミリを使えば、2種類の標準電圧の監視が可能です。 この製品には、通常のタイムアウトだけでなく、長時間の スタートアップにも対応したウォッチドッグが搭載されて います。3種類の電圧が混在する場合や、アクティブハイや アクティブローによるリセット機能が必要な場合には、 MAX6721〜MAX6729ファミリが最適です。この製品には、 通常のタイムアウトと長時間のスタートアップに対応した デュアルモードウォッチドッグが搭載されています。2種類 の標準電圧の監視(MAX6721/MAX6722)、あるいは2種類 の標準電圧に加えてもう1つの電源電圧(監視電圧は可変)の 監視(MAX6723/MAX6724)が行えます。また、マニュア ルリセット入力、パワーフェイルコンパレータ、デュアル リセット出力、RESET出力とRESET出力も備えています。 結論 ソフトウェアプログラムには必ずコードエラーが存在する ため、システムのロックアップを避ける工夫が必要です。 データがノイズやEMIの影響を受け、システムの動作がお かしくなることもあります。このようなシステムの信頼性 を高めるシンプルで安価な方法が、ウォッチドッグです。 外部ウォッチドッグを使えば、ウォッチドッグタイムアウト 期間内にWDIがトグルされなければµPをリセットするため、 システムのハングアップを防止することができます。さま ざまな種類のウォッチドッグが提供されているので、使用 目的に合ったデバイスが必ず見つかるはずです。 超高信頼性のウィンドウ型ウォッチドッグ 超高信頼性が必要な場合には、MAX6323/MAX6324ウィン ドウ型ウォッチドッグが最適です。これは、ウォッチドッグ 表1. アプリケーション別ウォッチドッグ機能分類 アプリ ケーション ファミリ 電圧監視 Simple plus reset MAX823/ MAX824 Factory-preset 2.5V, 3.0V, 3.3V, or 5V 1.12s 140ms SOT23 or SC70 packages Customized MAX6316– MAX6322 Factory-preset in 100mV steps 2.5V to 5V 4.3ms, 71ms, 1.12s, 17.9s 1ms, 20ms, 140ms, 1.12s Push-pull, open-drain, or bidirectional output Capacitoradjustable MAX6746– MAX6753 MAX6301– MAX6304 Factory-preset, or adjustable by voltage divider 1.575V to 5V 700ms to 70s in two ranges by 100pF to 100nF capacitor Preset, or 0.5ms to 5s by capacitor Long startup, pin-selectable MAX6369– MAX6374 SOT23-8, min/max windowed option SO or DIP packages Dual mode, pin-programmable startup delay Multisupply Windowed MAX6369– MAX6360 MAX6721– MAX6767 MAX6323/ MAX6324 Dual Mode ウォッチドッグ リセットタイム タイムアウト(min) アウト(min) 30ms to 60s; Dual factory-preset 1.8V, 200ms to 60s 2.5V, 3.0V, 3.3V, or 5.0V first-edge activation Dual fixed 1.8V, 2.5V, 3.0V, 3.3V, 5V; or dual fixed plus one adjustable Factory-preset 2.5V, 3V, 3.3V, or 5V Watchdog only 100ms Manual reset, powerfail comparator, dual reset, RESET plus RESET outputs 100ms Eight factory-trimmed options; timeout reset pulses accepted only within the defined window 1.6s normal 25.6s startup 1.5ms to 719ms (min); 10ms to 1.3s (max) window 14 特記事項 DESIGN SHOWCASE 非安定化電源で使う パルス充電器の設計方法 バッテリ電圧よりも低くなると、DS2770は、充電 ソースが取り外されたと判断し、充電を途中で停止 してしまいます。このような事態を避け、非安定化 充電ソースを使えるようにするためには、図1のよう な回路にします。 はじめに 本号に掲載されている「Li+パルス充電器の充電効率 とセル劣化」から分かるように、DS2770のようなパ ルス充電器は、電流制限付き安定化電源を必要とし ます。パルス充電器自体が充電電流を制御すること はないので、電流制限は必ず必要です。しかし、 DS2770に外付けの受動素子をいくつか追加すれば、 全波整流型の電流制限付き非安定化電源が使用でき るようになります。 非安定化電源を使うためには、DS2770データシート の回路例を3カ所変更する必要があります。150Ωの 抵抗の代わりに、ショットキダイオードD1を使い、 C1が充電ソース経由で放電しないようにします。接合 ダイオードD2を追加し、VCHが0.5V以上、VDDより も高くなり、かつ、バッテリが充電ソース経由で 放電しないようにします。安定化電源用の回路にも あるコンデンサC1は、容量を十分に大きくし、充電 ソース電圧がセル電圧を下回っている間、VCH ピン の電圧を保持できるようにしなければなりません。 C1容量の計算方法は、後述します。 動作説明 600Ω 600Ω 充電ソースがCSパッドとPACKパッド間に接続され ると、DS2770がソースを検知し、セルの充電を開 始します(最初に、充電前チェックと、必要に応じて トリクル充電を行います)。充電中は、VCHピンへの 印可電圧がバッテリ電圧以上でなければなりません。 CS 10:1 PACK- CS 10:1 360Ω PACK- Q2 CS D2 Q1 PACK+ D1 100Ω 1kΩ UV DATA CC VCH 4.7kΩ Li+/POLYMER CELL VIN 5.1V VDD 100Ω 1kΩ DQ PACK- Li+ PROTECTOR DS2770 C1 0.1µF VSS SNS RS 図1. DS2770に外付の受動素子をいくつか追加すれば、全波整流型の電流制限付き非安定化電源が使用できるようになります。 15 充電ソース電圧がセル電圧よりも高い間は、セルに 充電電流が流れ、VCH電圧はVDDよりも高い状態に保 たれます。逆に、充電ソース電圧がセル電圧よりも 低い間、VCH電圧は、コンデンサC1によってセル電圧 以上に保たれます。充電中の充電ソース電圧とVCH ピンの電圧、セル電圧の関係を、図2に示します。 VOLTAGE MEASURED AT VCH PIN コンデンサC1の容量計算方法 コンデンサC1は、充電ソース低電圧期間(図2のtlow をいう)、VCHピンの電圧をセル電圧以上に保つ働き をします。その間、VCHピンを通じて150µAの電流 (データシートにある最大値)がC1から流出します。 C1に必要な容量を計算するためには、まず、基礎式 を考えます。 CHARGE SOURCE 8 ただし、dtは低電圧期間(t low )、dVはtlow の最初に おけるVCHピンとセル電圧の差、IはVCHピンの内部 負荷です。これをCについて解くと、以下のようにな ります。 7 VOLTAGE (V) 6 tlow = 7ms 5 4 3 CELL VOLTAGE = VCV 2 必要な値を代入して、C1を求めます。 1 0 0 10 20 TIME (ms) つまり、1.5µFがC1の最低容量となります。ただし、 デバイス公差は考慮されていません。実際の回路では、 C1を含むすべてのデバイスについて最悪の公差まで 考慮する必要があり、tlowの幅についても最悪のタイ ミングまで考慮する必要があります。 図2. VCHピンの電圧は、最大セル電圧よりも高く保たれなければ なりません。 パルス充電器ですから、DS2770の急速充電には 2つのフェーズがあります。充電ソースの電流制限値 による定電流充電とパルス充電によるトップオフ です。紹介する回路で問題となるのは、トランジスタ Q1 が 連 続 的 に オ ン と な る 定 電 流 フ ェ ー ズ で す 。 まとめ 安定化電源用回路の受動素子をほんのわずか変更す るだけで、DS2770のようなパルス充電器を低コスト の非安定化電源で使うことができます。充電ソース 検出ピン(V CH )に接続する抵抗を、ショットキダイ オードに変更します。充電パスに接合ダイオードを 追加し、充電ソース経由でバッテリが放電すること を防止します。VCH に大容量コンデンサを接続し、 全波整流型充電ソースの出力波形の全域に渡り、 充電検出電圧をセル電圧以上に保ちます。このような 変更を施した回路は、充電サイクルの定電流フェーズ とパルスフェーズのいずれにおいても、VCH をセル 電圧(VCV)以上に保つことができます。 この間は定電流が望ましいため、パルス化が行われ ません。パルス充電によるトップオフフェーズでも、 Q1がオンとなるパルスの間、充電電流が流れます。 パ ル ス 幅 は 、 60Hz 全 波 整 流 電 源 の 1サ イ ク ル の 約100倍(DS2770の代表値は875ms)です。パルス フェーズでQ1がオフになると、C1は、セル電圧より もかなり高い充電ソース開放電圧までチャージされ ます。 16 DESIGN SHOWCASE ダラスセミコンダクタ製 ディレイラインの動作原理 1980年代初頭、ダラスセミコンダクタは、世界に 先駆けてシリコンディレイラインを開発しました (図1)。このICは、当時使用されていたモジュール式 ディレイラインよりも小型で費用対効果の高いもの でした。 の乱れを補償する回路とからなる斬新な回路が搭載 されています(図2)。 シリコンディレイラインの構築自体は、特に難しい ものではありません。論理ゲートには伝搬遅延があり、 ディレイラインとして使用できます。難しいのは、 プロセスや温度、電圧などの条件がどのように変化 しても、規定の遅延時間を精度良く設定できるディ レイラインとすることです。遅延時間を安定させる ためには、このようなパラメータの影響を受けない 補正方法が必要です。 最初のダラスセミコンダクタ製ディレイラインは、 RC構成のノコギリ波発生器と、発生器の電圧がある 値に達するとディレイライン出力を変化させるコン パレータ回路で構成されていました。キャリブレー ションは、製造時に、遅延時間が所定の値になるま でレーザでウェハ上のヒューズを焼き切るという方 法で行われました。温度補償の対策はほとんどされ ていませんでした。 一つの方法はフィードバックです。遅延時間の誤差 を求め、その誤差を補正する入力をディレイライン にフィードバックするわけです。この場合、遅延時 間の誤差を計測し、遅延時間を制御する方法が必要 です。論理ゲートの遅延時間を制御する簡単な方法に、 電源電圧を変化させるというものがあります。一般に、 電圧が高いほどゲートにおける遅延時間は短くなり ます。 その後、ディレイラインは進化しました。マキシム/ ダラスセミコンダクタ製の最新シリコンディレイラ インには、電圧制御ディレイライン(VCDL)とプロセ スや温度、電圧などの違いにより発生する遅延時間 VCC INPUT BUFFER FALLINGEDGE DELAY SET OUT OUTPUT BUFFER IN VREF VCC tD COMPARATORS LATCH LASER FUSES IN RISINGEDGE DELAY OUT RESET VREF 図1. 旧式のDS1000ディレイラインでは、サンプルRC回路で入力信号をシフトさせていました。最終的には、出力バッファで、シフトされ た信号を方形波に戻すとともに、フィルタ/シフトプロセス中に発生した信号劣化を除去します。 17 VCC (CONTROL VOLTAGE) DELAY INPUT DELAY OUTPUT 図2. VCDLは、電源電圧に反比例する伝搬遅延を持つNOTゲートだと考えることができます。 遅延時間を計測し、遅延誤差を求めるには、更に 仕組みが必要です。遅延時間を定量化する最もシン プルな方法は、遅延時間をもっと計測しやすいもの、 例えば周波数などに変換することです。ディレイ ラインの出力を反転させ、入力にフィードバックす ると、周波数1/2tdの発振器になります(tdは、ディ レイライン全体の遅延時間)。これが、VCDLを使っ た電圧制御発振器(VCO)です(図3)。 抵 抗 器 (R REF )で 構 成 さ れ る 基 準 電 圧 と 比 較 さ れ ます。RFREQ は、使用温度範囲と使用電圧範囲で RREF の特性にマッチングするように調整されます。 コンパレータ出力は、フィルタを経由し、VCOの駆 動電圧に供給されます。周波数が高くなるとVFREQ がVREFに対して低くなり、VCOに対する駆動電圧が 下がり、周波数が下がります。周波数が下がると、 その反対が起き、周波数が上がります。周波数安定 度は、RREF の安定度と等しくなります。RREF は、 使用電圧範囲と使用温度範囲で安定した正確な基準 です。RFREQは、制御ループによりRREFと等しく保 たれます。制御ループはまた、プロセスや温度、電圧 の変動による回路の遅延の変動も打ち消します。 正確な基準周波数があれば、位相ロックループ(PLL) によってVCO周波数を基準周波数にロックさせ、 基準周波数と同じ精度のVCO周波数を得ることがで きます。これが、遅延ロックループ(DLL)と呼ばれる 回路です。また、基準電圧など、製造時に高精度な キャリブレーションが可能な基準が、シリコンの 世界では利用できます。 しかし、この回路単独では、ディレイラインとして 使うことができません。この回路が実現するのは 高安定発振器であり、ダラスセミコンダクタの EconOscillatorTMで使われています。幸い、同じシリ コンチップ上の遅延セルは、VCOの遅延セル(図3)と ほぼ同じ特性を持っています。VCDL(VCOとして 構成されたもの)に供給される制御電圧は、他の個別 遅延セルにも同じ効果をもたらします。開ループ動 作であっても、印可された制御電圧の効果は、VCO に構成された遅延セルに対する効果と同じです。 つまり、プロセスや温度、電圧による変化に対する 補償が実現できるわけです。 これで、補正回路を持ったディレイラインを構築す るために必要な要素が揃ったことになります。図4に、 3チャネルのディレイラインを持つDS1135のブロッ クダイアグラムを示します。 この回路で(図4)、発振器出力が、定電流源でバイア スされた電圧制御抵抗にフィードバックされます。 制御抵抗は、実はスイッチトキャパシタ回路であり、 そのDC抵抗はフィードバック信号の周波数に反比例 します。つまり、周波数が高くなるほど電圧は低下 します。この電圧は、マッチングした電流源と固定 VCC (CONTROL VOLTAGE) OSCILLATOR OUTPUT 図3. VCDLによるVCO。VCDLは、出力を(入力に対して)反転し、入力にフィードバックすることにより、電圧制御発振器として使うことが できます。 EconOscillatorは、Dallas Semiconductor, Inc.の商標です。 18 これらの遅延セルは、デイジーチェーン接続して DS1100のようなタップ付きディレイラインにする ことも、また、DS1135のように個別に使うことも できます。EconOscillatorのDS1075とDS1077 では、発振器部分にプログラマブル分割チェーンが 使用され、シリコン発振器をユーザ自身が構成する ことが可能です。この回路にVCOの制御電圧を制御 するDACを組み合わせれば、DS1085のようなフル スケールの周波数シンセサイザができあがります。 上記の回路は、ダラスセミコンダクタの特許技術 です(U.S. patent 5,982,241他)。 VCC IREF = IFREQ IREF IFREQ LOWPASS FILTER VCC (CONTROL VOLTAGE) OSCILLATOR OUTPUT VOLTAGE COMPARATOR RREF RFREQ DIVIDE-BY-N (PROGRAMMABLE) tD IN1 OUT1 IN OUT OUT2 IN2 IN3 OUT3 図4. 遅延ロックループ技術によるディレイライン(DS1135)。個々の開ループディレイラインは、閉ループ基準をマスタにキャリブレー ションした後、独立ディレイライン、タップ付ディレイラインなどに構成することができます。 19
© Copyright 2026 Paperzz