第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
エネルギー代謝量からみた和船櫓漕ぎの推進効率の検討
Study of Propulsion Efficiency of Working Ro-Scull from
a View Point of Energy Metabolic Expenditure
○学生会員 川﨑 規介(長崎大学)
正会員 八木 光晴(長崎大学)
正会員
正会員
清水
高山
健一(長崎大学)
久明(長崎大学)
要旨
日本の伝統的な和船における櫓漕ぎ推進は現在殆ど見られなくなっているが、他の人力推進と比べると推
進効率は良いとされる。本研究では和船櫓漕ぎ時における人間のエネルギー代謝に注目し、和船櫓漕ぎの推
進効率の検討を試みた。すなわち、エネルギー代謝率(RMR)および運動強度(Mets)を算出し、海上における和
船櫓漕ぎと陸上におけるウォーキング、ジョギングとを比較した。エネルギー代謝の計測には、市販の間接
熱量計を用い、代謝エネルギー(cal/min)と Mets を計測した。その結果、和船櫓漕ぎの RMR および Mets
は、陸上におけるウォーキングと同程度であり、エネルギー消費の面からも持続して漕ぎ続けられることが
示唆された。これらの結果から和船櫓漕ぎは若年初心者への慣海性養成及びシーマンとしての技量であるシ
ーマンシップ養成の導入手段として十分寄与できることが示唆された。
キーワード:推進性能、エネルギー代謝、櫓漕ぎ推進効率
1.はじめに
かつて日本各地で見られた伝統的な木造の和船
に着目した。運動時のエネルギー代謝量について調
漁舟は、材料の木材の減少、船大工の高齢化、沿岸
べられた先行研究では、ウォーキングやジョギング、
漁業の機械化等のため、ほぼ消滅してしまった。櫓
それ以外の様々な運動においてエネルギー代謝率
漕ぎ推進についても同様で、現在では漁場で舟の場
(RMR)の比較(3)や、運動強度(Mets)に着目した
所を一定に保つためにごく一部で使用される程度で
ものなどがある。エネルギー代謝率とは基礎代謝量
ある。
を基準とした様々な身体活動やスポーツの身体活動
一方、「櫂(練り櫂)は 3 年、櫓は 3 月」と言わ
の活動強度の指標(4)である。また、Mets とは、様々
れるように櫓漕ぎの推進は櫂と比べると扱いやすく
な身体活動時のエネルギー消費量が、安静時エネル
初心者が海に慣れ親しむ、慣海性を養成する際の導
ギー消費量の何倍にあたるかを指数化したもので、
入の部分として、また、海事資料館で行われている
安静時を1Mets(4)としている。
櫓漕ぎ体験教室は初心者へのシーマンシップ養成に
そこで本研究では次世代への櫓漕ぎ技術(文化)
役立てられている。さらに、櫓漕ぎは 1 人でも行う
の継承のため、エネルギー消費の観点に着目して和
ことが出来、他の人力推進方法と比較すると軽微な
船櫓漕ぎ時の消費エネルギーをエネルギー代謝量
力(馬力)で推進できる点で究極の省エネ推進とも
(MR)や運動強度(Mets)、さらにエネルギー代謝率
いえ、従って推進効率も高いことが予想される、ま
(RMR)によりジョギングやウォーキングといった
た、漕ぎ方次第では初心者でも 1 時間以上連続して
陸上運動と比較することで、和船櫓漕ぎ推進に伴う
漕ぐ事も可能である。しかし、櫓漕ぎの推進効率の
エネルギー代謝量を再評価することを目的とした。
検討は、池畑らによるロボットを用いた試漕実験 、
(1)
高山・清水らによる和船を使った実船実験(2)でいく
2.方法
つか試みられている程度である。
2.1
推進効率を評価する指標には様々なものがある
データの収録
櫓漕ぎ実験は長崎県西彼時津町の時津港内で行っ
が、本研究では櫓漕ぎにともなうエネルギー代謝量
91
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
た。図 1 に示すように港内に往路 200m、復路 200m
熟練度等によりそれぞれ異なるが、各自が行う通常
の計 400m の直線区間を設定し、被験者がこれらの
時のペース配分に依った。
区間を往復進むのに要した時間を計測した。また櫓
漕ぎ時の緯度・経度、船速データを GPS(GARMIN
2.2
データの解析
社製)にて 1 秒ごとに収録した。実験開始時にはデ
本研究においては、市販の間接熱量計から得られ
ジタル風速計(WS-02)より風速・気温・湿度を計測し
た Mets を用いて、エネルギー代謝率(RMR)を以
た。また、市販の間接熱量計(Body Media 社製)
下の式(4)より算出した。
Wireless
LINK
RMR = 1.2 × (Mets - 1)
Armband を被験者の左腕に装着し、
被験者の安静時および櫓漕ぎ時の単位時間あたりエ
一方、呼吸代謝測定装置により得られた単位時間
ネルギー代謝量(cal/min)および、Mets を測定した。
あたりの酸素消費量(VO2)および単位時間あたり二
酸化炭素量排出量(VCO2)から呼吸商(RQ)を求めた。
RQ = (VCO2) / (VO2)
得られた呼吸商から酸素1L 当たりの 発熱当量
(cal)を求め、単位時間当たりの酸素消費量(mL)を
乗じることで運動時の単位時間当たりエネルギー代
200m
謝量(cal/min)(6)を算出した。
ジョギング
ウォーキング
3.結果と考察
3.1
櫓漕ぎ被験者
本研究における被験者の年齢、身長、体重、喫煙
引用:Mapion
図1
の有無、櫓漕ぎ経験の度合い、および実験時の風速
実験場所
について表1に示す。なお、櫓漕ぎ経験の度合い、
すなわち熟練度については本研究では特に考慮して
本研究では被験者 A~E の 5 名において櫓漕ぎ実
いない。
験及び前述した陸上でのウォーキング、ジョギング
の運動を実施した。これらの被験者の消費エネルギ
表1 被験者の各項目
ー計測の際にはあらかじめ被験者毎に身長、体重、
性別、喫煙の有無について記録した。また、櫓漕ぎ
運動に合わせてジョギング、ウォーキングの順に距
離 400m 程度の陸上における軽微な運動を併せて実
施し、単位時間あたりのエネルギー代謝量(cal/min)
および Mets を測定した。また、今回使用した間接熱
量計では被験者の呼吸(酸素消費量)からエネルギ
ー代謝量を求めるのではなく、皮膚表面から発生し
た熱量を基に換算しているものである(5)ことから、
3.2
データの信頼性を確かめるため、本研究における被
間接熱量計と呼吸代謝測定装置によるエネ
ルギー代謝量及び Mets の相関
験者 2 名に 1 名を追加した合計 3 名の被験者に対し
て呼吸代謝測定装置(ディケイエイチ社製)VO2000
図 2 および図 3 には、それぞれ今回使用した市販
を用いて単位時間あたりのエネルギー代謝量
の間接熱量計と呼吸代謝装置から得られた単位時間
(cal/min)と Mets の相関を調べた。VO2000 による
当たりエネルギー代謝量(cal/min)及び Mets の相関を
単位時間あたりのエネルギー代謝量(cal/min)の計
示す。どちらも若干の誤差はあるものの今回の実験
測においては単位時間あたりの酸素消費量(VO )お
で行った櫓漕ぎ、ウォーキング、ジョギングにおい
よび単位時間あたり二酸化炭素量排出量(VCO2)を
ては市販の間接熱量計においても十分精度良く計測
測定し、ここから呼吸商(RQ)を求めた。なお、こ
が可能であることを示している。
2
れらの運動におけるスピードは被験者の年齢や体格、
92
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
図 2 市販の間接熱量計と呼吸代謝測定装置により
得られた単位時間当たりエネルギー消費量の比較
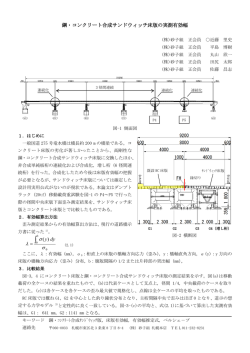
図 4 各運動における被験者の単位時間当たりエネ
ルギー代謝量(cal/min)
図 3 市販の間接熱量計と呼吸代謝測定装置により
得られた単位時間当たりエネルギー消費量の比較
図5
3.3
各運動における被験者の Mets 値
各運動におけるエネルギー代謝量及び Mets、
表2
エネルギー代謝率
各運動における Mets 値(4)
図 4、図 5、図 6 に本実験により得られた各被験
者の櫓漕ぎ、ジョギング、ウォーキングにおける単
位時間あたりのエネルギー消費量(cal/min)、Mets
及びエネルギー代謝率(RMR)を示す。
図 4 より、各運動における単位時間あたりのエネ
ルギー消費量(cal/min)はいずれの被験者において
も櫓漕ぎ、ウォーキング、ジョギングの順に小さく
なっており、被験者 5 名の平均では和船櫓漕ぎで
3.62cal/min、ウォーキングで 5.33cal/min、ジョギン
図 6 は前述した Mets 値より求めた各被験者のエネ
グで 8.31cal/min となっていた。平均的にみると和船
ルギー代謝率(RMR)を示す。エネルギー代謝率と
櫓漕ぎの単位時間当たりエネルギー消費量はウォー
は基礎代謝に対する様々な身体活動やスポーツの身
キング、ジョギングに比べそれぞれ 0.68 倍、0.44 倍
体活動の活動強度の指標を示しているが、図 5 で示
となっていた。
した Mets と同様に安静時でなく基礎代謝を元に算
出した身体活動強度であっても被験者 A や B でウォ
一方、
図 5 より各運動における Mets の比較におい
ても図 4 と同様にいずれの被験者においても櫓漕ぎ、 ーキングと同程度、それ以外の被験者 C、D、E にお
ウォーキング、ジョギングの順に小さくなっていた。
いてはウォーキングの半分程度であったことから櫓
さらに、各運動における Mets 値との関係は概ね表 2
漕ぎはウォーキングやジョギングよりも身体活動強
のとおり とされており、本研究で得られた櫓漕ぎ
度の面で疲れにくいと考えられる。
(4)
の運動強度は軽いウォーキングと同程度、もしくは
それ以下の運動強度であったということがわかる。
93
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
消費量(cal/min)はいずれの被験者において
も櫓漕ぎ、ウォーキング、ジョギングの順に
小さくなっており、平均的にみると和船櫓漕
ぎの単位時間当たりエネルギー消費量はウォ
ーキング、ジョギングに比べそれぞれ 0.7 倍
程度、半分以下となっていた。
3) 運動強度(Mets)もしくはエネルギー代謝率
(RMR)から見ると櫓漕ぎは軽いウォーキン
グと同程度、もしくはそれ以下の運動強度と
図6
各被験者の単位時間当たりエネルギー代謝率
いえる。
4) 以上より、エネルギー消費が少なく疲れにく
いと考えられる和船櫓漕ぎは、若年初心者で
図 4 より得られた、各運動における単位時間あた
も長距離、長時間を漕ぐことができるため、
りのエネルギー消費量(cal/min)をもとに、30 分間
これらを通して海に慣れ、和船櫓漕ぎ技量に
の運動を仮定した場合の和船櫓漕ぎのエネルギー消
習熟することにつながり、慣海性・シーマン
費量は平均値で 108.6cal であり、同様にウォーキン
シップ養成の導入手段として十分寄与できる
グで 159.9cal、ジョギングでは 249.3cal となる。こ
ものと考えられる。
のことから和船櫓漕ぎにおいて 30 分間の運動で消
費するエネルギー量 159.9cal に相当する運動を仮定
謝辞
すると、ウォーキングの場合、同量のエネルギーを
本研究を行うに当たり、被験者として協力頂いた
消費するのにかかる時間は 44.2 分となる。したがっ
方に厚くお礼申し上げます。
て同じ消費カロリーを仮定した場合、和船櫓漕ぎは
ウォーキングよりも 14.2 分長く運動することがで
また、本研究の一部は平成 27 年度笹川科学研究
きることから、疲れにくく、長時間運動することが
助成金(研究番号:27-714)を受けて実施しました。
できると考えられる。
関係者の方にこの場を借りて御礼申し上げます。
これらのことから、エネルギー消費の少ない、疲
れにくいと考えられる和船櫓漕ぎは、初心者でも長
い距離を漕ぐことができ、このことにより海上にお
参考文献
けるシーマンとしての技量養成、すなわちシーマン
(1) 池畑光尚・田草川善助:櫓漕ぎの推進性能に関
シップ養成の導入手段に適していると考えられる。
す る 水 槽 実 験 , 日 本 造 船 学 会 論 文 集 , 第 172 号 ,
pp.287-297,1992.12.
(2)高山久明・清水健一・山脇信博・合田政次:和船
4.まとめ
人力推進における熟練者の櫓漕ぎ技量評価-Ⅲ.木造
本研究では和船櫓漕ぎをエネルギー消費の観点に
和船推進抵抗と被験者の櫓漕ぎ推進効率に関する個
着目してエネルギー代謝量(MR)や運動強度(Mets)、
人評価,日本航海学会論文集,第 111 号,pp.17-23,
さらにエネルギー代謝率(RMR)の指標によりジョ
2004.9.
ギングやウォーキングといった陸上運動と比較する
(3)朝比奈一男・中川功哉:運動生理学, p.259-263,
ことで、和船櫓漕ぎの推進効率を評価した。その結
大修館書店,1973.
果、以下の点が明らかとなった。
(4)河野啓子他:食生活改善指導担当者研修テキスト,
1) 呼吸代謝装置を用いて市販の間接熱量計によ
pp.183-187,厚生労働省,2008.3.
り得られた値と比較したところ、本研究で行
(5)田村俊世:間接熱量計について, 静脈経腸栄養,
った櫓漕ぎ、ウォーキング、ジョギングにお
Vol.27 No.6, pp.1297-1300(2012)
いては市販の間接熱量計においても十分精度
(6)河野啓子他:食生活改善指導担当者研修テキスト,
良く計測が可能である。
pp.190,厚生労働省,2008.3.
2) 各運動における単位時間あたりのエネルギー
94
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ウイリアムソンターンにおける操縦性の影響-Ⅱ.
正会員 ○世良 亘(神戸大学) 非会員 貴志 大智(神戸大学)
要旨
ウイリアムソンターンは、元の進路上に確実に戻れる転落者救助のための操船方法として知られている。
しかし近年、船種・船型や舵の多様化により、標準的操船方法では必ずしも元のコースライン上に戻れない
場合が現れている。前報では、深江丸を用いた実船と操船シミュレータでウイリムソンターン実験を行い、
舵角と舵を反対にとる回頭角の影響について調査を行った。その結果、標準的操船方法では元のコースライ
ン上から大きく外れる状況を確認し、最大舵角一定で反対舵角にとる回頭角を変化させて調整することが救
助操船としては望ましいと考えられた。また、各船型について操船シミュレータで横偏位量について調査を
行ったが、標準的な操船方法では過半数の船が1L 以内の横偏位量で戻ることができず、最適な反対舵角に
とる回頭角については個々の船舶で実験的に求めるに留まった。
そこで本研究では、操船シミュレータを利用して舵を反対にとる回頭角に影響を与える要素について調査
し、元のコースライン上に戻ることのできる回頭角を求めるための簡易推定式作成について検討を行った。
キーワード:海難救助、操縦性、ウイリアムソンターン、船外転落者、操船シミュレータ
1.はじめに
ったが、標準的操船方法では全ての船が内側に偏位
洋上で人が海中に転落した場合、操船者は救助の
し、1L 以内の横偏位量で戻れた船はわずかであっ
ために迅速な措置を執らなければならない。このと
た。そのため、元のコースライン付近に戻れるよう
き、短時間で落水者の元へ戻るための標準的操船法
転舵回頭角を実験的に求めると、全て標準的な 60
の一つとしてウイリアムソンターンが提案されてい
度よりも小さな角度となった。
る。この操船法は、元のコースライン上にほぼ確実
しかし、各船が実験を行い元に戻れる回頭角を求
に戻れる操船法として夜間や視界不良時に有効とさ
めることは現実的ではなく、既知の値を利用して求
れているが、近年は標準的操船方法では必ずしも元
めることができることが望ましい。そこで本研究で
(1)
のコースライン上に戻れない場合が現れている 。
は、ウイリアムソンターンにおいて元のコースライ
(2)
前報 では、深江丸を用いて実船と操船シミュレ
ン上に戻ることのできる転舵回頭角を求めるための
ータでウイリムソンターン実験を行い、舵角と舵を
簡易推定式について検討を行った。
反対にとる回頭角(以下、転舵回頭角)の影響につ
いて調査を行った。その結果、標準的操船方法では
2.操船シミュレータ実験
元のコースライン上から大きく外れ、最大舵角一定
2.1
実験方法
で転舵回頭角を変化させて調整することが救助操船
実験は、神戸大学大学院海事科学研究科の操船シ
としては望ましいと考えられた。また、各船型につ
ミュレータを用いて行った。実験で使用した各船の
いて操船シミュレータで横偏位量について調査を行
主要目を表1に示す。
表1
船型
A:26 万 DWT 型タンカー(Full)
B:26 万 DWT 型タンカー(Half)
C:26 万 DWT 型タンカー(Ballast)
D:6000TEU コンテナ船
E:12.7m3 LNG 船
F:6000 台積自動車専用船
G:1万 DWT 型タンカー
全長(m)
321.95
321.95
321.95
318.00
285.30
199.93
113.95
各船の主要目
垂線間長(m)
311.00
311.00
311.00
301.00
273.41
190.00
108.00
95
型幅(m)
58.00
58.00
58.00
42.80
43.91
32.26
18.40
型深さ(m)
29.50
29.50
29.50
24.10
25.02
34.55
9.80
喫水(m)
20.00
14.63
9.91
14.00
10.80
9.50
7.90
方形係数
0.83
0.75
0.75
0.63
0.70
0.52
0.75
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
実験海域は障害物のない深水域とし、風潮流や波
結果となった。そこで、T’を用いて以下のような式
などの外力がない状態で、
初期速力は Navigation Full
で転舵回頭角ψを推定することとした。
とした。標準的操船方法に従い、直進状態から Hard
a starboard(右舵角 35 度)に舵を取り、原針路から
ψ[deg]=60-6×T’
・・・・・・・・・・・・・・・・・・ (1)
60 度回頭した時に Hard a port(左舵角 35 度)とし
た。船が左回頭となり、原針路の 20 度手前まで回頭
推定式により求めた転舵回頭角ψで舵を反対に
したときに舵角を Midships として、ほぼ反方位とな
きりウイリアムソンターンを行ったときの航跡を図
った時の横偏位量を計測した。
3に示す。全ての船型で横偏位量は1L 以内となり、
平均では 0.36L となった。
2.2
実験結果と簡易推定式
3.まとめ
実験結果の航跡図を図1に示す。この時の偏位量
と各値との関係を調べたところ、舵角 15 度での無次
本研究では、ウイリアムソンターンにおいて元の
元操縦性指数 T’との相関が良く図2に示すような
コースライン上に戻ることのできる簡易推定式を検
討し、1L 以内の横偏位量に収まる推定式を開発し
た。今後、
他の船舶でも使用可能かを調べると共に、
より精度の高い方法を検討していくことが望まれる。
参考文献
(1) Xianku ZHANG, etc. : Researches on the
Williamson Turn for Very Large Carriers,
Naval Engineers Journal, Vol.125, No.4,
pp.129-135, 2013.12.
(2) 世良亘, 他:ウイリアムソンターンにおける操
縦性の影響,日本航海学会講演予稿集,Vol.2,
No.2,pp.194-195,2014.10.
図1
図2
標準操船時の航跡図
図3
無次元操縦性指数 T’と偏位量
96
推定式による回頭角での航跡図
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
通常航海時の操縦運動データを用いた操縦性指数の推定法
正会員○寺田
大介(水研セ・水工研)
正会員
松田
真司(海上保安大学校)
要旨
本論文では、通常航海をしている状態における操縦運動データすなわち旋回角速度と舵角の時系列データ
を用いて、操縦性指数を推定する新しい方法について提案する。ここでは、野本の 1 次系近似の操縦運動モ
デル所謂 TK モデルを統計モデルの一種である制御型自己回帰モデルと関連付けることにより、操縦性指数が
時系列解析の結果として得られる可能性があることが確認できたので、その基礎理論について示す。
キーワード:操縦性、制御型自己回帰モデル、操縦性指数
t
a exp ,
T
t
b exp 1 K
T
1.はじめに
(1)
野本によって導入された操縦性指数 は、通常航
海時における船の操縦運動特性の概略を知る上で非
常に有益(2)である。
ここで、離散化された雑音 v(n)は(4)式のような関係
一般に、操縦性指数を推定するためには zig-zag
試験を実施する必要があるが、近年は通常航海時の
がある。
操縦運動データから操縦性指数を直接推定する方法
がいくつか提案
(3)(4)
(3)
v(n) v(t t)
されている。
tt
1
exp T t t t ' v(t ')dt ',
t
E v(n) 0,
本論文ではこれらの方法とは異なる方法を提案
する。具体的には、T-K モデルの解析解を離散化し、
E v(n)2
外乱の項を自己回帰過程で白色化する。その結果、
(4)
2t 2
T
2
1 exp
t
T
2
モデルは制御型自己回帰モデル(5)で近似でき、その
(2)式は、有色雑音 v(n)によって駆動される旋回角
自己回帰係数に基づいて操縦性指数の推定が可能に
速度 r(n)に関する 1 次の制御型自己回帰モデルであ
なる。その詳細について以下に示す。
ることが分かる。
2.野本の一次系近似の操縦運動モデル
3.有色ノイズの白色化と操縦性指数の推定
(1)式に示す T-K モデルに確率的な雑音を加えた
(2)式の雑音項を白色化するために、雑音項が(5)
式の自己回帰過程で近似できるものと仮定(6)する。
モデルを考える。
Tr(t) r(t) K (t) v(t)
M
(1)
v(n) ci v(n i) u(n)
ここで、T は追従性指数、r(t)は旋回角速度、K は旋
(5)
i1
回性指数、δ(t)は舵角および v(t)は正規白色雑音に従
ここで、ci は v(n)に関する自己回帰係数であり、u(n)
う雑音項である。v(t)のパラメータである平均および
は平均 0、分散 σ2 に従う正規白色雑音である。
分散はそれぞれ 0 および τ2 とする。ただし、v(t)は有
一方、次の関係は自明である。
限な分散を持つが必ずしも白色性を満たすものとは
v(n) r(n) ar(n 1) b (n 1)
仮定しない。したがって、操縦性指数を推定するた
v(n 1) r(n 1) ar(n 2) b (n 2)
めには、後述するように、この項に関して白色化す
(6)
る必要がある。また、記号(・)は 1 階の時間微分を表
v(n M ) r(n M ) ar(n M 1) b (n M 1)
している。
したがって、(6)式を(5)式に代入することによっ
(1)式を解析的に解き、時間刻み Δt で離散化すれ
て有色雑音は白色化できることになり、結局のとこ
ば、(1)式は(2)式のように変換することができる。
ろ(1)式は次に示す(7)式のように変形することがで
r(n) ar(n 1) b (n 1) v(n)
(2)
きる。
ただし、
97
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
M 1
r(n) i r(n i) i (n i) u(n)
ズムを利用している。
(7)
i1
4.まとめと今後の課題
ここで、αi は被制御変数である旋回角速度に関する
自己回帰係数であり、βi は操作変数である舵角に関
本論文では、通常航海をしている状態における操
する自己回帰係数である。αi および βi と a、b および
縦運動データすなわち旋回角速度と舵角の時系列デ
ci との関係は、M=1~3 の場合について示せば(8)式か
ータを用いた操縦性指数の新しい推定法についてそ
ら(10)式のようになる。
の基礎理論を示した。この方法の特徴は、確率力学
(M=1 の場合)
1 a c1
2 ac1
1 b
bc
2
1
系を解析解に基づいて厳密に離散化し、雑音項を離
散型自己回帰過程でモデル化するところにある。
本論文中では数値実験例および実船実験例など
(8)
の実例を示せていない。現在、計算プログラムのコ
ーディングを実施しているので、講演会の際には実
(M=2 の場合)
船データを用いた検証例を示す予定である。
1 a c1
2 ac1 c2
3 ac3
1 b
bc
1
2
3 bc2
5.謝辞
本研究は、科学研究費補助金挑戦的萌芽(2656019)
(9)
の助成を受けて実施されているものであることを付
記し、関係各位に感謝の意を表します。雑音項のモ
デル化に関しては情報・システム研究機構長の北川
(M=3 の場合)
源四郎先生から有益な御助言を賜りました。ここに
1 a c1
2 ac1 c2
3 ac2 c3
4 ac4
1 b
bc
1
2
bc
3
2
bc
4
3
深甚な謝意を表します。
6.参考文献
(1) 野本謙作・田口賢士:船の操縦性に就いて(2),
(10)
造船協会論文集, 第 101 号,pp.57-66,1957.
(2) 本田啓ノ輔:操船通論,pp.24-36,成山堂書店,
2008.
(3) D. Terada & G. Kitagawa: Estimation of the
なお、ここで M=0 の場合は雑音項が正規白色雑音で
Maneuverability under External Disturbance
あることを示していることを改めて強調しておく。
based on dada assimilation, Proceedings of
したがって、観測された旋回角速度および舵角の
IAIN2009 (Web 掲載), 2009.
時系列データに対して(7)式で表される制御型自己
(4) 羽根冬希:船体運動パラメータの包括的同定手
回帰モデルを当てはめ、最適なモデル次数および自
法,日本船舶海洋工学会論文集,第 20 号,
(5)
己回帰係数を赤池情報量規準によって決定 すれば、
pp.27-38,2014.
(8)式から(10)式などで示される代数方程式系を解
(5) 赤池弘次・中川東一郎:ダイナミックシステム
くことにより a、b および ci が推定できる。さらに、
の統計的解析と制御[新訂版],pp.30-93,サイ
(3)式の関係を使うことにより、a および b から操縦
エンス社,2000.
性指数を推定できることになる。(8)式から(10)式な
(6) 山内保文:船の動揺の時系列論的解析について,
どで示される代数方程式系を解く方法としてはニュ
造船協会論文集,第 99 号,pp.47-64,1956.
ートン-ラフソン法などが利用でき、(3)式から操縦
(7) 寺田大介・橋本博公・松田秋彦:離散-連続混
性指数を推定する方法としては最適化法が利用でき
合 AR モデルによる横揺れパラメータの推定
(未
(7)
る 。なお、著者らのうちの一人が過去に実施した
公表),第 1 回推進・運動性能研究会資料(日
(7)
横揺れパラメータの推定に関する研究 においては、
代数方程式系はニュートン-ラフソン法で解き、
その
後の横揺れパラメータの推定の際は遺伝的アルゴリ
98
本船舶海洋工学会),2015.
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
VHF 無線電話通信の内容から見た VTS の効果検証 正会員 瀬田 広明(鳥羽商船高等専門学校) 学生会員 ○大田 大(鳥羽商船高等専門学校) 非会員 Cemil YURT0REN(イスタンブル工科大学) 非会員 Y.Volkan AYDOGDU(イスタンブル工科大学) 要旨 世界各地の船舶輻輳海域では VTS センターが設置され、VTS オペレータによる航行管制がなされている。
VTS オペレータに対しての研修が義務付けられたが、各国により VTS の運用方法は様々である。 本研究では、イスタンブル VTS センターと伊勢湾海上交通センターにおける VHF 無線電話通信の内容を分
析し、各海域の現状を鑑み、VTS オペレータと操船者との間でどのような無線通信が行われているか、また、
VTS センターが海上交通の安全にどのように寄与しているのか検証することを目的とする。検証の結果、VTS
の効果は管制海域の大きさや海域特性など、種々の要因により左右されるものであることが示唆された。
キーワード:海上交通工学、交通管制、VTS センター、VHF 無線電話通信 1.はじめに 2.VTS センターの比較 海上交通における事故防止を目的とし、1948 年に
VTS はレーダ、テレビカメラ、AIS からのデータ
イ ギ リ ス の リ バ プ ー ル で 航 行 支 援 業 務 ( Vessel
及び VHF 無線電話装置を用いた海上交通に関する
Traffic Service :VTS)が初めて運用され、その後、ヨ
情報を収集、把握、監視、航行船舶に対し安全のた
ーロッパ、北米へと普及し、1980 年代には世界各地
めに必要な情報を提供し、場合によっては船舶に対
へと広がり、海上交通の安全確保に寄与している。
して危険防止等のための必要な勧告を行うものであ
2010 年の STCW 条約マニラ改定において船長、
る。また、視界の状況を考慮した航路外待機や大型
一等航海士の最小限の能力基準に VTS 利用能力が
船の入港予定の管理なども行う。
追 加 さ れ た 。 併 せ て 、 VTS オ ペ レ ー タ に 対 し て
地中海と黒海を繋ぐトルコ海峡(チャナッカレ海
IMO/IALA ガイドラインに準拠した世界標準に準拠
峡、マルマラ海、イスタンブル海峡の総称)は、分
した知識、技能の習得と運用、技能認定
(1)
が必要
離方式(Traffic Separation Scheme:TSS)が設定され、
となった。
7 つのセクターに分割された海域を 2 つの VTSC(イ
しかし、航路外待機指示、交通方法の遵守・危険
スタンブル VTSC、チャナッカレ VTSC)により航
回避の勧告など、船舶運航に直接関与できるように
行管制が行われている。イスタンブル VTSC は 4 つ
VTS の権限が増大した反面、VTS オペレータに課せ
のセクターを担当している。図 1 にトルコ海峡に設
られる責任と精神的な負担も増大することとなる。
定された各セクターを示す。
一方、操船実務者から見れば、各種航行支援情報の
享受により精神的な安心感を得られる反面、陸船間
の意思疎通に齟齬が生じた場合に想定される、船舶
運航の最終責任者という立場と VTS からの指示と
の優先順位決定の問題が挙げられる。
そこで本研究では、VTS オペレータと操船者間で
執り行われる VHF 無線電話通信の内容を分析し、操
船者に対してどのような利点があるのか、または、
どのような欠点をもたらしているのかを、伊勢湾海
上交通センター(以下、伊勢湾 VTSC とする。)と
イスタンブル VTS センター(以下イスタンブル
図 1 トルコ海峡と VTS の各セクター VTSC とする。)を比較し、VTS の効果を検証するこ
とを試みた。
99
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
3.1 使用言語の割合 表 1 は本研究で対象とする伊勢湾 VTSC とイスタ
ンブル VTSC を比較したものである。
図 2 には通信に用いられた言語を海域別に示した
イスタンブル VTSC では 1 人の VTS オペレータが 1
ものである。イスタンブルでは英語の割合が半数を
セクターを担当しており、セクター内の権限と責任
超えていることがわかった。そこで、AIS を用いて
は VTS オペレータ個人に委ねられており、休息を十
当日観測された船舶の船籍について調査した結果、
分に取ることを求めている。一方の伊勢湾 VTSC で
セクターカドゥキョイ内を航行した AIS 搭載船のト
は、全対象海域を 2 名以上の VTS オペレータで対応
ルコ籍船の割合は 32%であり、伊勢湾を航行した
し、情報を共有しながらエラーチェーンを断ち切る
AIS 搭載船の日本籍船の割合は 66%であった。
ためのバックアップ体制がとられている。
VTS での使用言語の割合は、当該海域を航行する
また、イスタンブル VTSC 管轄内は TSS が設定さ
船舶の船籍に依存することが見受けられる。また、
れているため、漁船は航路内を航行する船舶を避け
水先人が乗船した場合には、VTSC との通信を自国
なければならず、伊勢湾のように漁船と一般航行船
語で行うので、自国語の使用割合が自国船籍の割合
舶が航路内で競合することが無いという特徴がある。
を上回っている理由だと考えられる。
この点においては、イスタンブルと伊勢湾の VTS オ
ペレータの負担度が大きく異なる。
表 1 イスタンブルと伊勢湾の VTSC の比較
管轄
面積 対象
海域 当直
人数 就労
時間 就労
資格 イスタンブル VTSC 伊勢湾 VTSC 約 1000 ㎢ 約 500 ㎢ 4 セクター (マルマラ、カドゥキョイ、 カンデリ、ターケリ) 5 人 (1 人/セクター) 6 時間勤務 (48 時間以上休憩) 国際航路の船長経験 1 年以上+研修 伊良湖水道航路 及び その周辺海域 4~5 人 (2 人/全管制海域) 2 直制 (9~17 時、17~9 時) イスタンブル 伊勢湾 図 2 VTS での使用言語割合 3.2 時間別通信時間 図 3 は VTSC と船舶との間で行われた VHF 無線
電話通信の通信回数を時間別に示したものである。
海上保安官+研修 セクターカドゥキョイでは深夜から早朝にかけ
て通信回数が多いことがうかがえる。これは錨地付
3.VHF 無線電話通信による VTS の内容分析 近の海域において錨泊に関する事項を VTSC との間
イスタンブル VTSC と伊勢湾 VTSC では、当直人
で通信している船舶が多くなっていたことと、投錨
数や時間、管制海域面積などそれぞれ運用体制に特
した船舶に対して翌早朝にイスタンブル海峡へ入航
徴があることが分かった。そこで VTS オペレータと
する時間を通知するための通信が多いことが原因で
船舶間の VHF 無線電話通信に着目して VTS オペレ
ある。また、早朝 4 時頃からイスタンブル海峡に向
ータの管制方法について以下の 4 つの項目(使用言
け抜錨を開始し、再度、錨泊に関する通報するため
語の割合、通信時間、通信内容、平均通信開始位置)
通信回数が多くなっていることを確認できた。一方、
について 1 日分の通信内容を聴取し、比較検討を行
伊勢湾 VTSC においては、朝夕のラッシュ時に通信
った。イスタンブル VTSC では、1 セクターに 1 つ
回数が多少増加する傾向がうかがえた。
の国際 VHF のチャンネルが割りあてられており、本
研究ではセクターカドゥキョイ(13ch)を対象とし、
伊勢湾では船舶と通信を行う 13ch と 22ch を対象チ
ャンネルとした。なお、通信内容の分析は、鳥羽商
船高専とイスタンブル工科大学海事学部内に設置し
た船舶通信モニタリングシステム (2)で取得された
情報を用いて行った。
図 3 時間帯別通信回数 100
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
3.3 通信内容 3.5 通信開始位置 表 2 には VTSC と船舶との通信において、1 日の
図 5 および図 6 は VHF 無線電話を用いて VTS が
通信回数と 1 回あたりの平均通信時間を示している。
行われた時の対象船舶の位置と通信内容を示してい
イスタンブル VTSC では比較的単時間の通信が多い
る。図 5 に着目すれば、セクターカドゥキョイでの
のに対して伊勢湾 VTSC では回数が少ないものの 1
VTS は、管制対象海域内またはその近傍付近でのみ
回あたりの平均通信時間が長くなっていた。この理
行われていることがわかる。錨地付近ではアンカー
由は、伊勢湾 VTSC では位置通報などを行った際に、
レポートが多く、イスタンブル海峡入り口付近およ
関係する情報(例えば、操業情報など)を VTS オペ
び海峡の南口に存在するランウドアバウト方式の通
レータから操船者に提供していることが多いためで
行分離帯付近では、操船指示を含む他船情報の提供
ある。
が多いことが確認できる。つまり、イスタンブルの
表 3 には、VTS で行われた主な通信内容を示して
VTS オペレータは、セクター内に存在する船舶への
いる。いずれも接近する船舶の情報や他船の動向な
サービスに専念しているといえる。換言すれば、セ
ど共通する内容を確認することができた。しかし、
クター内の船舶動静を全て把握することが求められ
イスタンブル VTSC では、Pilot 業務や港湾管理など
る反面、オペレータに判断を委ねられた場合には、
伊勢湾 VTSC に比べ業務内容が多肢にわたり、様々
瞬時に適切な判断が下せると共に、周囲の船舶への
な通信が行われていることがわかった。
伊勢湾 VTSC では、船舶運航に直接関与しオペレ
ータに判断を委ねられるような通信内容は確認でき
なかった。一方、トルコ海峡内では、原則追い越し
行為は禁止されているが VTS オペレータの許可が
あれば追い越すことができる。そのため、イスタン
ブルの VTS オペレータは船舶に対して追い越しの
許可を行ったり、待機指示を与えたりしている通信
が複数回確認できた。このように追い越しをかける
船舶や錨地へ向かう船舶が発生した際、オペレータ
は当該船舶と見合い関係が悪くなるすべての船舶に
図 5 セクターカドゥキョイ付近での通信位置
対して、他船の航行情報を提供しており、表 2 にお
いてイスタンブル VTSC の通信回数が多くなってい
る一因である。
表 2 通信回数 通信時間 VHF の通信回数と平均通信時間
イスタンブル VTS 800 回/日 約 20 秒/回 表 3 伊勢湾 VTSC 271 回/日 約 60 秒/回 通信内容の割合
イスタンブル VTSC
27%
位置通報
24%
投錨・抜錨通報
8%
入航時間指定
4%
追い越し確認
15%
動静確認
4%
Pilot 時間確認
14%
他チャンネル指定
4%
その他
伊勢湾 VTSC
位置通報
予定及び変更通報
動静確認
AIS 表示内容訂正
68%
20%
7%
5%
図 6 伊勢湾周辺での通信位置
101
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
フォローも必要に応じて行っていることが察せられ
参考文献 る。一方、図 6 のプロット結果から伊勢湾の VTS は、
(1) IALA: IALA Recommendation V-103 on Standard 主要航路全域に及んでいることがわかる。セクター
for Training and Certification of VTS の設定が無いため、必然的に対象船舶も増えること
Personnel Edition2.1, pp.6, 2013.12. (2) 瀬田広明・小野太津也・矢野雄基・鈴木治:VHF
から VTS オペレータは広範囲を担当することが免
れない。そのため、複数のオペレータを配置し、連
無線電話通信から見た伊勢湾の海上交通状況,
携しながら、運用ミスが発生しないよう業務にあた
日本航海学会論文集,第 121 号,pp.55-61,
る必要がある。しかしながら、広範囲を管制するこ
2009.9. (3) 鈴木治:船舶通信の基礎知識(改訂版),p145,
とで、危険海域で船舶が集中することないように遠
2013.7. 距離の段階で予め運航調整を行うことが可能となり、
結果として海域全体の安全が確保されていると推し
測ることができる。
4.むすび VTS オペレータの面から見ると、VTS オペレータ
の能力を超える船舶を管制しなければならない状況
下では、複数のオペレータを配置することが望まれ
る。複数のオペレータが存在すれば意思決定の仕方
やその情報共有が煩雑となる。一方、1 人のオペレ
ータのみで管制、状況判断から意思決定、船舶への
指示は、それぞれの決定基準が個々のオペレータの
主観的判断に委ねられている。均一な安全レベルを
担保するためにも、オペレータの精神的な負担軽減
のためにも、客観的判断基準のもとで管制を行える
ような管制支援システムの設計が必要となるであろ
う。
また、操船実務者の面から見た場合、VTSC との
手続きは運用上できる限りの簡素化が望まれる。そ
の意味から、基本的にセクター毎に割り当てられた
チャンネルのみを聴守し、同チャンネルで通信する
ことは合理的である。日本国内においては 16ch で通
信相手を呼び出し、指定チャンネルへ移動すること
が習慣付いているが、無線局運用規則では海岸局の
呼出は 16ch 以外でも可能とされている(3)。そのた
め、合理的な運用を行うためにも、13ch または 22ch
が空いている場合には積極的にこれらのチャンネル
を用いて呼出しを行っても良いのではないかと考え
る。
以上のように、VTS の効果は管制海域の大きさや
海域特性など、種々の要因により左右されるもので
あることが示唆された。VTS 運用基準などを策定す
る場合には、VTS オペレータと操船実務者とが互い
の共通認識の上に立ち、海上交通の円滑さを損なわ
ないことが重要である。
102
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
OZT を用いた海上交通分析の基礎研究 正会員○福田 厳(東海大学) 正会員 庄司 るり(東京海洋大学) 要旨 地震および津波発生時には、船舶は救援物資の運搬や交通手段の確保などライフラインを保つ重要な役割
を担う。津波から船舶を守ることは乗組員の命はさることながら、のちの復興にむけても大変重要である。
しかし、津波襲来時の避難対策を目的とする海上交通分析はまだ少ない。津波発生時には航行中の船舶はよ
り水深の深い海域へと避難することとなっている。本研究は、TCPA および DCPA を用いて衝突範囲を表示
できる OZT(Obstacle Zone by Target)を用いた海上交通分析の基礎研究を行い、津波襲来時の船舶の避難対策
に利用する海上交通評価として本手法が有効であることを示し、またその課題を明らかにした。
キーワード:交通、OZT、AIS、津波、海上交通分析 1.はじめに きると考える。本研究においては、OZT を用いた海
国土交通省海事局の「船舶運航事業者における津
上交通分析の基礎研究を行い、その有効性と今後の
(1)
『船長は本社の
波避難マニュアルの手引き」 には、
課題を明らかにする。
運航管理所とは連絡できないことを念頭に、事前に
津波対応行動パターンを想定し、そのときの状況に
2.Obstacle Zone by Target 応じた最善の措置を選択する準備をしなければなら
OZT とは、自船行動空間の中で相手船の存在とそ
ない』とある。釜石海上保安部では、津波に遭遇す
の運動により妨げられる空間、すなわち相手船によ
るまでに水深 200m 以上の海域へ到達できるのであ
る妨害ゾーン(4)を表示できるものである。従来航海
れば沖への避難が安全とし、到達できない場合は船
士は危険の判断のひとつの手段として、TCPA およ
舶を放棄し陸上への避難も選択肢にいれるよう指導
び DCPA を用いて評価を行ってきた。舶用レーダに
(2)
している 。実際に東日本大震災の際には東京湾に
おいては、TCPA および DCPA は数字としてしか把
おいてはほとんどの船舶が、また注意報のみしか発
握することができないが、OZT を用いることにより
令されていなかった大阪湾においても数隻の船舶が、
視覚的に捉えることができるようになる。また、現
(3)
避難行動をとり沖へ避泊した 。安全海域への迅速
在警報に用いられている TCPA および DCPA よりも
な避難は、乗組員ならびに船舶を津波から守ること
効果的に警報を鳴らすことができるとういう研究成
につながる。これを可能にするには、海上交通状況
果も発表されている(5)。 を考慮した事前対策が必要である。
3.OZT を用いた海上交通分析 津波対策の海上交通分析では、針路変更などに伴
う衝突の危険があるエリアを把握できることが重要
OZT は、衝突針路を相手船のコース上に表すこと
である。これまで船舶では衝突の危険の一つの判断
ができるため、どのエリアに針路を向けると危険か
基準としてレーダ上で表示される TCPA(Time to
どうかを判断できると考えた。OZT の計算手法につ
Closest Point of Approach)や DCPA(Distance of Closest
いては参考文献(6)にある手法を用いた。本研究にお
Point of Approach)が利用されてきた。本研究では、
いては、OZT を計算する際の自船の周りに設定する
他船のコース上にその船舶に対して自船の衝突針路
r の値を、図 1 に示す Pedersen の Geometrical Collision
を推定できる OZT(Obstacle Zone by Target)を海上交
Diameter の計算を利用した(7)。Geometrical Collision
通分析に利用することを検討する。OZT を海上交通
Diameter は、自船の周りに他船を接するように描い
分析に利用することによって、日常的な海上交通流
た時の、図 1 に示す対角線の長さ Dij を計算するモ
に お い て 、 ど の エ リ ア に 針 路 を と る と TCPA や
デルである。Dij は(2)に示した相対速度 Vij を用いて
DCPA が危険な値になるかを判断することができ、
以下のように計算される。
津波発生時の避難計画に際し、コース設定や針路を
変更するためのエリアの選定に役に立てることがで
103
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
4.清水港における分析 本研究では、大地震及び大津波来襲時の航行安全
対策に関する調査研究(8)においてモデル港として調
査が行われた清水港について分析を行った。東海大
学海洋学部3号館に AIS 受信機(古野電気 FA-30)を
設置し AIS データの収集を行い、2015 年 3 月 1 日か
ら 3 月 31 日までの一ヶ月間の AIS データを用いて分
析を行った。 図 1 Geometrical collision diameter 1 つのセルサイズは一辺が 1/10 マイルの正方形と
し、同時刻に受信した船舶について、お互いの船舶
の距離が 3 マイル以下で DCPA が 0.5 マイル以下とな
る場合に OZT を計算した。 4.1 OZT を用いた海上交通分析の結果 (2) 図 3 に、清水港周辺の分析結果を示す。また、地
形的条件を示すため、図 4 に Google Earth 上にプロ
ここで、Vi と Vj は自船と他船の速度、θは自船と
ットしたものを示す。最も値が高くなったのは、航
他船の針路差、βは相対針路、Bi および Bj は自船
路の出入り口付近であることがわかる。図 3 および
と他船の船幅である。 図 4 からわかるように、セルの値が 500 以上となる
よって、自船の周りに描かれる円の半径 r は、
区域が港の入り口付近から航路に沿って港外へと広
がっている。このことより、津波発生時にはこのエ
リアに針路をとると DCPA が 0.5 マイル以下となる可
(3)
となる。
能性がある。特に入港船舶が沖に向けて回頭する際
まず、対象となる海域を正方形のセルに分割する。
には注意が必要である。 ある範囲内に存在するそれぞれの船舶に対し、総当
たりに OZT 計算を行い、セルの値を計算する。具体
的には、求められた OZT のラインを緯度経度に変換
Tagonoura
し、このラインが通過するセルに 1 を加算する。図
2 に、セルと OZT との関係を示す。図においては、
Shimizu
1 つ目の OZT1 が(3,5)(3,6)および2つ目の OZT2 が
(3,2)(3,3)を通過しているため、それぞれのセルに 1
が加算される。
Toi
Yaizu
セル
Oigawa
図 3 OZT を用いた清水港周辺の分析結果(MATLAB) 図 2 OZT ラインとセルの関係図
104
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
東京海洋大学名誉教授今津隼馬先生はじめ、越中島
Tagonoura
OZT 研究会の皆様に深く感謝いたします。 7.参考文献 (1) 国土交通省海事局:船舶運航業者における津波
避難マニュアル作成の手引き, 2014. 3.
Yaizu
(2) 釜 石 海 上 保 安 部 : 地 震 ・ 津 波 被 害 へ の 備 え Toi
http://www.kaiho.mlit.go.jp/02kanku/kamai
shi/tsunami/tsunami.html (3) 牧野秀成・若林伸和・矢野吉治・塩谷茂明:津
Oigawa
波警報発令時における湾内の船舶の避航・避泊
行動に関する調査研究, 日本航海学会論文集,
図 4 OZT を用いた清水港周辺の分析結果(Google Earth) Vol.125, pp191-197, 2011. 9.
(4) 今津隼馬・福戸淳司・沼野正義:相手船による
妨害ゾーンとその表示について,日本航海学会
論文集,Vol.107,pp.191-197,2002.9. 5.まとめ (5) 福戸淳司・今津隼馬:相手船による妨害ゾーン
本研究では津波対策に利用するための OZT を用
(OZT を用いた衝突警報の検討, 日本航海学会
いた海上交通分析を行った。分析結果より、OZT を
論文集, Vol.128, pp. 49-54, 2013.3. 海上交通分析に利用することにより、危険エリアを
(6) 今津隼馬:衝突針路を使った OZT 算出方法, 日
示すことは可能であると考える。特に、津波発生時
本航海学会誌 Navigation, Vol.188, pp. 78-81, には航行船舶が一斉に安全な水深の海域に向かうこ
2014.3. (7) Pedersen, P.T.:Collision and Grounding Mechanic,
とが推測されるため、DCPA が危険な値となるエリ
アを事前に把握しておくことは有効であると考える。 Proceedings of WEMT’95, Copenhagen, The
今後、サンプリング時間、計算する船舶間距離、
Danish Society of Naval Architects and Marine
TCPA や DCPA の設定値などについて検討していく
Engineers, pp125-157, 1995.
(8) 日本海難防止協会:大地震及び大津波来襲時の
必要がある。さらに他の分析手法などと比較し、そ
航行安全に関する調査研究, 2013. 5.
の有効性をさらに検証していく必要もある。また、
清水港入り口付近においても、桜エビやシラス漁の
(9) 高嶋恭子・津金正典:緊急避難時の航行管理に
時期になると由比漁港から出航した漁船団が通過し
関 す る 研 究 , 日 本 航 海 学 会 論 文 集 , Vol.128,
ていくことが知られており、津波の避難対策として
pp21-27, 2013.
用いるためには、AIS 非搭載船舶のデータも分析す
る必要がある。OZT を用いて船首方位ごとや時間ご
との分析を行うことによって、入出航船舶にとって
どのようなエリアが危険かを判断できる。これを利
用して、船舶を一斉避難させた場合(9)にどのような
エリアが危険かを判断できる。またそれぞれの船舶
の避難コースや避難時間を変更した際に危険度の高
いエリアがどのように変化するかを本手法により評
価を行うことによって、効果的な船舶の避難行動を
分析できると考える。 6.謝辞 本研究は JSPS 科研費 15K16308 の助成を受けたも
のです。また、本研究に関しアドバイスを頂いた、
105
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
AIS 記録データに基づく避航操船時の相対距離について
正会員○三宅 里奈(海上技術安全研究所) 正会員
正会員 長谷川 和彦(大阪大学)
福戸 淳司(海上技術安全研究所)
要旨
避航操船の支援を行う上で、操船者の感覚にあった避航操船法を提案することは、その支援を実際に使用
してもらう上で必要不可欠である。従来、多くの避航操船アルゴリズムが提案されているが、その多くは衝
突の脅威(衝突リスク)の発生に基づいて避航操船の判断をしている。一方、前報で示した通り、この衝突
リスクに基づく避航操船アルゴリズムの避航開始時期は、現実の避航操船時期よりも遅く、避航のための変
針も現実の操船より大きいことが分かった。このため、著者らは、有効な避航操船支援を目的として、記録
された AIS データから実運航での避航操船を抽出し、解析を行っている。
前報では、AIS データから1船対1船の横切りの見合いを抽出し、避航の有無および避航操船時期を特定
する手法を示すとともに、航過する際の航過距離等の避航操船の特徴を示した。
本報では、避航開始時期を特徴付ける指標として、避航開始時における避航対象の船舶(以下、保持船)
の方位変化と保持船との相対距離に注目し、避航開始条件を方位変化に対応した相対距離として表せること
を示した。
キーワード:海上交通工学、衝突回避、AIS、実態調査、相対距離
1.はじめに
避航開始時における避航対象の船舶(以下、保持船)
避航操船の支援を行う上で、操船者の感覚にあっ
の方位変化と保持船との相対距離に注目し、避航開
た避航操船法を提案することは、その支援を実際に
始条件を方位変化に対応した相対距離として表せる
使用してもらう上で必要不可欠である。
ことを示した。
従来、多くの避航操船アルゴリズム
(1)(2)
が提案さ
れているが、その多くは衝突の脅威(衝突リスク)
2. 避航操船時期の解析
の発生に基づいて避航操船の判断をしている。この
2.1
解析の概要
衝突リスクは、操船シミュレータ等で避航操船を我
実運航で行われている避航操船をモデル化する
慢できない危険な状況を求め、その状況を指標化し
ことを目的とし、AIS データを用いて、2 船の見合い
たもので、その指標値は、例えば最接近距離(DCPA)
における避航操船時期と避航操船の状況を解析した。
や最接近距離に至るまでの時間(TCPA)を用いて表現
具体的には、まず任意の条件下で接近した 2 船の遭
されてきた。
遇において、避航操船が行われた遭遇時のデータ(以
(3)
一方、前報 で示したように、この指標値に基づ
下、ケース)を AIS データから抽出した。次に、そ
く避航操船アルゴリズムによる避航操船支援システ
れぞれの遭遇において、避航操船が開始された時期
ムを操船シミュレータを用いて熟練船員により評価
を針路や DCPA の変化等から手作業により求めた。
したところ、避航開始は、現実の避航操船時期より
解析対象海域として、比較的横切りの見合い関係
も遅く、避航のための変針も現実の操船より大きい
が多く、様々な遭遇状況が見られる周防灘東部海域
(4)
ことが分かった 。このため、著者らは、有効な避
と東京湾南海域を選定し、それぞれ 59 ケースと、
航操船支援を目的として、記録された AIS データか
141 ケースの合計 200 ケースについて解析を行った。
ら実運航での避航操船を抽出し、解析を行っている。
解析に用いた AIS データの概要や 2 船のデータを抽
前報では、AIS データから1船対1船の横切りの
出する条件などは、文献 (3)(5)に詳細を示しているた
見合いを抽出する方法を示すとともに、その 2 船に
め、本報では割愛する。
ついて、避航の有無および避航を開始した時期を特
200 ケースのうち、避航手段として、変針と大幅
定し航過する際の航過離隔距離等の避航操船の特徴
な減速の両方が確認されたケースがいくつか観測さ
を示した。
れたが、本研究では変針のみを解析対象とした。
本報では、避航開始時期を特徴付ける指標として、
106
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
L<320m; 6
L<300m; 20
L<280m, 8
L<260m, 2
L>=320m; 2
T1:avoiding the stand-on ship
T2:keeping the avoiding angle
T3:returning to the original course
L<40m; 1
L<240m, 6
(A)
L<220m, 5
L<200m, 7
Course changing angle for
collision avoidance measured
from original course (deg)
L<180m, 7
L<160m, 8
L<140m, 9
L<120m, 12
図1
L<100m, 12
避航船の船長構成
L>=320m; 13
L<320m, 6
unknown; 1
L<60m; 5
L<300m, 15
L<80m, 35
L<280m, 4
L<260m, 4
(C)
10
10
55
00
L<240m, 15
(A) One stage collision avoidance manoeuvre
(B) Two stage collision avoidance manoeuvre
(C) Collision avoidance manoeuvre with three stage
returning manoeuvre
L<100m, 22
L<220m, 7
L<120m, 19
L<200m, 19
L<180m, 16
図2
(B)
15
15
L<80m, 95
L<160m, 4
L<140m, 15
図3
避航操船時期
保持船の船長構成
ケースごとに求めた。同様に、T1-T2 間、T2-T3 間、T3
避航船の船長の分布を、図 1 に示す。避航船の船
以降の定常状態の 2 船の状態量を求めた。
長は、60-80m が 95 ケースと最も多く、以下、280-
2.3
300m が 20 ケース、80-100 および 100-120m がとも
避航開始時における相対距離
に 1 ケースであった。一方、保持船の船長分布を図
長畑氏は、避航船から保持船を望む方位の変化
2 に示す。その船長は、同じく 60-80m が 35 ケース
(以下、方位変化)を考慮して、個別の船舶の避航
と最も多く、以下 80-100m が 22 ケース、100-120m
開始時における相対距離を表現する数式モデルを導
および 180-200m がともに 19 ケースで、避航船に比
いている(7)。しかし、船舶全体の一般的な傾向を表
べて広範に分布していた。
すためには、操縦性能などの初期条件を実態に合わ
せる必要があるとしている。
2.2
避航操船時期の特定
そこで著者らは、避航開始時における避航船と保
変針による代表的な避航操船手段では、避航のた
持船の距離(以下、相対距離)について、船舶全体
めの変針を行った後、避航終了時に原針路あるいは
に適用できる簡単なモデル式を構築するため、避航
次の変針点に向かう変針を行う。
開始時の方位変化と相対距離の関係を解析した。な
(6)
このような避航動作は、文献 によると、図 3 の
お、方位変化は、避航開始時での保持船を望む相対
ようなコースレコーダの記録紙の上に、針路がパル
方位と、航行フェーズでの避航船に対する保持船の
ス状またはステップ状の変化としてあらわれると言
平均相対速度(以下、平均相対速度)での移動量を
われている。このため、避航のための変針を図 3 の
考慮した方位との差の絶対値として求めた。
ような針路変化から判断し、避航開始時期と避航終
図 4 の各矢印は、航行フェーズにおける平均相対
了時期を AIS データから抽出できる。本報では、そ
速度ベクトルを示し、方位変化別に色分けしたもの
れぞれのケースについて図 3 に示すように、避航開
である。各矢印の始点は、避航船が避航を開始した
始(T1)、変針角保持 (T2)、避航終了(T3)の時期を
時の保持船の相対位置を示している。なお、図 4 は
針路変化や遭遇した 2 船の状態量などから、著者の
避航船の位置を原点とし、船首方向を縦軸上向きと
1 人が総合的に判断し抽出した。
した相対座標系とした。
避航の決定は、避航開始時期直前の状況から判断
図 4 の原点から各矢印の始点までの距離(相対距
される。そのため、T1 直前の定常な操船状況を航行
離)と方位変化には、わずかながら相関関係がみら
フェーズとし、このフェーズでの 2 船の状態量を
れた。しかし、ケースのばらつきが大きく相関があ
107
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
2.3.2
まり強くなかったため、方位変化の絶対値が 1.0
保持船の前方を航過する場合
deg./min 未満は 0.1 deg./min ごと、1.0 deg./min
避航船が保持船の前方を航過する場合について
以上は 1.0 deg./min ごとの方位変化の平均値をそ
も同様に、方位変化の代表値と重心までの相対距離
の代表値とし、代表値別に各矢印始点の重心、つま
の関係を求めた。
り避航船が避航を開始した時の相対位置の重心を求
図 7 は上述のように求めた解析値、点線は解析値
め、解析に用いた。
の近似直線を表している。さらに、実線は(1)式から
図 5 に方位変化の代表値と各重心までの相対距離
求めた推定値を示している。なお、横軸は、図 5 と
の関係を示す。図 5 の横軸は、方位変化の常用対数
同様に、方位変化の常用対数で表現している。図が
で表現している。非常に強い直線的な傾向がみられ
示すように、観測値のばらつきが大きいが、おおよ
ることから、点線で示される近似直線を求めた。避
その傾向が(1)式で表現することができる。
航開始時における相対距離 R は、(1)式で表現でき
る。なお、図 5 中の r2 は近似式の相関係数を示す。
12000
10000
(1)
R 3447 log 5546
:避航開始直前の方位変化の平均(deg./min)
8000
6000
4000
ところで、解析に用いた 200 ケースの避航操船に
2000
おいて、避航船が保持船の後方を航過するケース
0
-2.0
(148 ケース)と、前方を航過するケース(52 ケー
図5
ス)が観測された。そこで、両者に(1)式が適用でき
-1.0
0.0
1.0
2.0
方位変化と相対距離
るかを検討した。
2.3.1
保持船の後方を航過する場合
12000
避航船が保持船の後方を航過する場合について、
図 5 と同様に、方位変化の代表値と重心までの相対
10000
2
8000
距離の関係を求め、図 6 プロットした。点線は解析
6000
値の近似直線を表している。実線は(1)式から求めた
4000
推定値を示す。図 6 が示すように、実線で示される
2000
全体の近似直線が、後方航過時の近似直線とほぼ一
0
致していることから、(1)式を適用できる。
-2.0
図6
8
0.0
1.0
2.0
解析値と推定値の関係
(保持船の後方を航過する場合)
7
X (NM)
-1.0
6
14000
5
12000
4
5822
10000
3
8000
2
6000
1
4000
0
2000
-1
over
-2
0
-5
-4
図4
-3
-2
-1 0 1
Y (NM)
2
3
4
-2.0
5
図7
避航開始時の相対位置と
-1.0
0.0
1.0
2.0
解析値と推定値の関係
(保持船の前方を航過する場合)
平均相対速度ベクトル
108
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
2.4
前後左右の離隔距離
隔距離は、ある範囲内の方位変化では、ほぼ一定の
避航開始時における相対距離は(1)式で表現でき
離隔距離であることがわかった。
る。さらに、前後左右各成分の離隔距離が明確にな
避航船が保持船の後方もしくは前方を航過する
れば、より現実的な避航操船をモデル化することが
場合とも、上述の近似式により、避航開始時の相対
できる。そこで、2.3 節で求めた方位変化と避航開
距離を表現できることを示した。今後、変針角保持
始位置の重心位置までの成分別ごとの離隔距離につ
時や避航終了時についても同様の解析を進め、モデ
いて相関を求めた。図 8 に方位変化と成分別離隔距
ル化を行う予定である。
離の関係を示す。×印は縦方向、つまり避航船の前
4.謝辞
方向の離隔距離 RLO を示し、△印は横方向、つまり避
航船の右方向の離隔距離 RLA を示す。図が示すよう
本研究の一部は、日本学術振興会科学研究費若手
に、縦方向の離隔距離は横方向の離隔距離よりも方
研究(B) (No. 15K18297 代表者:三宅里奈)の支援
位変化に大きく影響されることがわかる。一方、横
を受けて実施した。
方向の離隔距離は、ばらつきがみられるが、方位変
化が小さいケースは 2000-3000m にまとまっており、
5.参考文献
大きいケースは 0-1000m にまとまっている。
(1) 原潔, 野本謙作, 小須田敏:操船シミュレータ
による避航操船の研究-I
縦方向の離隔距離と方位変化に直線的な強い相
避航動作に影響す
関がみられることため、図 8 の実線で示される近似
る諸要素とその評価, 日本航海学会論文集,
直線を求めた。避航開始時における縦方向の相対距
第 64 号, pp.79-86, 1981.
(2) K.
離 RLO は、(2)式で表現できる。
HASEGAWA,
J.FUKUTO,
R.
MIYAKE,
M.
YAMAZAKI : An intelligent ship handling
12000
×:longitudinal distance (RLO)
simulator
△:lateral distance (RLA)
avoidance function of target ships, Proc.
RLO= -3370 log( ) + 5119 (r 2= 0.89)
10000
with
automatic
collision
of INSLC 17, 2012.
8000
(3) 三宅里奈, 福戸淳司, 長谷川和彦:AIS 記録デ
6000
ータに基づく避航操船手法の解析, 日本航海
4000
学会講演予稿集
2000
2014
(4) R. MIYAKE, J. FUKUTO, Y. NIWA M. MINAMI: A
0
-2.0
-1.0
0.0
1.0
2.0
user
図8
test
of
Automatic
Navigational
Intention Exchange Support System using an
方位変化と前後左右の離隔距離
RLO 3370 log 5119
Vol.2, No.2, pp.100-103,
intelligent ship-handling simulator, Proc.
of CAMS 2013, 2013.
(2)
(5) R. MIYAKE, J. FUKUTO, K. HASEGAWA: Modeling
:避航開始直前の方位変化の平均(deg./min)
of Observed Ship Domain in Coastal Sea Area
Based
3.結論
on
AIS
Data,
Activities
in
Navigation: Marine Navigation and Safety
実運航で行われている避航操船をモデル化する
of Sea Transportation, pp.143-150, CRC
ことを目的とし、AIS データから横切りにおける 2
船の見合いを抽出し、避航開始時期の解析を行った。
避航開始時における相対距離は、避航開始直前の
Press, ISBN 978-1-138-02858-6
(6) 海上交通工学:藤井弥平, 巻島勉, 原潔, pp.96,
海文堂,1981, ISBN4-303-23401-X.
方位変化と相関があることが確認でき、簡単な近似
(7) 長畑司:避航の判断と操船者の特性-III : 避
式により表現できることを示した。なお、前後左右
航開始距離とカタストロフィー, 日本航海学
の成分別の離隔距離は、前方向の離隔距離は方位変
会論文集, 第 63 号, pp.19-28, 1980.
化に大きく影響を受け、方位変化が小さい時は離隔
距離が大きくなることを示した。一方、右方向の離
109
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ECDIS における情報レイヤーのユーザビリティに関する研究
正会員
正会員
中川
浩一郎(航海訓練所)
石倉
歩(海技大学校)
正会員○大井 一道(海技大学校)
正会員 村田
信(航海訓練所)
要旨
2010 年の STCW 条約改正(マニラ改正)により、タンカーや外航旅客船に対して電子海図情報表示装置
(Electronic Chart Display and Information System:ECDIS)の搭載が義務づけられ、現在では多くの船
舶に搭載されている。ECDIS に表示される情報は従来の紙海図のものに加え、海図の品質や精度、各種警報
等、多岐にわたっている。一方、その画面は紙海図と比較してあまりに小さいサイズとなる上、多くの情報
を表示させることで情報量が過多となり、かえってユーザーに負担を強いるおそれがある。ユーザーにとっ
て使いやすい装置とは、必要なときに必要な情報が得られる装置である。
筆者らは、地理的および環境条件により航行が制限される状況において ECDIS に表示すれば有用と考えら
れる海図情報について、海技免状(航海)受有者を対象に調査し、前述の状況に応じた情報レイヤーグルー
プの有用性について検討した結果について述べるとともに、状況に応じた情報レイヤーグループの表示につ
いて提案を行う。
キーワード:海図、ECDIS、情報レイヤー、ユーザビリティ
1.はじめに
それがある。
電子海図情報表示装置(以下、ECDIS という)は、
そこで筆者ら研究グループは、必要なときに必要
図 1 に示すように電子海図(以下、ENC という)や
な情報が得られるようになれば、ECDIS がユーザー
位置、針路、速力等のセンサー情報をはじめ、様々
にとって更にユーザビリティの高いものになると考
な情報をその画面上に表示させる。画面に表示され
え、これを満たすための条件を考察し、具体策を検
る情報の設定方法は機種によって異なるが、いずれ
討する。
の場合もユーザー自らが必要な情報を必要なタイミ
2.SENC のユーザーカテゴリと使用上の問題
ングで得ることができるよう、その都度設定を変更
することが求められている。
ECDIS にインストールされた ENC データは、
System-ENC(以下、SENC という)という形式に変換
しかしながら、情報をコントロールするという観
点から ECDIS を紙海図と比較してみると、ECDIS を
され、ECDIS 上に表示される。
製造するメーカーと使用するユーザーとの間に操作
ECDIS に表示される SENC 情報は、IMO 第 82 回海上安
性の認識について乖離があると考えられる。例えば、
全員会(MSC82)において採択された MSC.232(82)(1)
紙海図において、港泊図のような縮尺の大きい海図
(以下、性能基準という)に基づき、次の 3 つの表
と航洋図のような縮尺の小さい海図を比較すると、
示形式にカテゴリー分けされている。
その用途の違いから記載されている情報の種類や量
も自ずと異なるものになる。使用する紙海図を順番
に使用していけば、ユーザーが必要とする種類や量
の情報が入手 できる仕 組みとなっ ている 。一方
ECDIS の場合は、地理的および環境条件の変化にあ
わせて表示される情報の種類や量が自動的に変化す
ることはなく、それを自分で設定変更する必要があ
る。
更に、紙海図と比較して ECDIS の画面は小さいも
のである上、多くの情報を表示させることで情報量
が過多となり、かえってユーザーに負担を強いるお
図1
110
ECDIS 画面の例
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
(1) 基本表示(Display Base)
電子海図上の最も基本的な情報のみ表示されるカ
テゴリーである。海岸線や安全等深線等、海図とし
て必要最低限となる以下の情報が含まれている。
(2) 標準表示(Standard Display)
基本表示に加え、以下の、浮標やビーコンといっ
た航路標識やその名称、錨地や航路の境界線等、航
海計画と航路監視における最低要件として使用でき
る情報が含まれたカテゴリーである。
図2
(3) 全表示(All /Other Information)
SENC 情報の例
ENC の有する全ての SENC 情報を表示させるカテゴ
リーである。水深や海底ケーブル、航路標識の灯質
地理的特性に基づくカテゴリー
やその他の地名等、非常に詳細な情報が表示される。
(1)沿岸航海
(2)湾や灘等、陸地に囲まれた海域
また、ECDIS に表示される SENC 情報は、IHO 刊行
(3)狭水道
物 S-52「ECDIS の海図内容及び表示事項の IHO 仕様
(4)大洋航海
(2)
基準」 に、その記号表記や色彩が規定されており、
地理的特性及び航海状態に基づくカテゴリー
ECDIS の画面上には図 2 に示すような性能基準で規
(5)出入港
定された各オブジェクトが表示される。標準表示と
(6)投錨・抜錨
全表示については、ユーザーによって表示や非表示
地理的特性及び交通環境に基づくカテゴリー
を選択することが可能である。
(7)輻輳海域
しかし、メーカーが割り振ったオブジェクトを表
気象環境に基づくカテゴリー
示させるために使用するレイヤーグループが上記の
(8)視界制限状態
カテゴリーとは別に定められており、その分類や階
層の深さがメーカー毎に異なる。
なお、SENC 情報の種類については、日本無線株式
また、種々のオブジェクトの表示や非表示の設定
会社製 ECDIS「JAN-2000」において選択可能である
はユーザー自ら行うものであり、地理的および環境
標準表示属性及び全表示属性の SENC 情報 59 項目を
条件によって所要のオブジェクトをその都度選択し
対象とする。
て表示させ、あるいは非表示とする必要がある。
併せて、ECDIS の利便性や操作性について自由意
見を記述させることとする。
3.調査方法
4.調査結果と考察
現在の SENC 情報の利便性について実態を把握
するため、アンケート調査を実施する。アンケート
アンケート調査は、実際に海技免状と運航経験を
調査方式は、選択式および記述式の複合質問方式で
有し、かつ、ECDIS に関する知識を有する者を対象
前述の訓練終了時に実施を依頼して行う。アンケー
とするため、平成 26 年 4 月から平成 27 年 1 月、独
トの質問内容は、以下に示す地理的および環境条件
立行政法人海技教育機構海技大学校において実施し
において表示すべき SENC 情報をリストから選択さ
ている ECDIS 講習の受講者 113 名を対象として実施
せるものとする。
した。その結果回収率は 100%であった。
アンケートから得られた回答を図 3 のように収集
した結果、必要とされる SENC 情報は地理的および環
境条件によって異なることが判明した。
また、ECDIS の利便性に関して改善を求める意見
が多く挙げられた。中でも「メニュー階層の深さに
対する不安」や「小画面が故の単位面積当たりの情
報量過多」についての改善要望が多かった。
111
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
図 3 各地理的および環境条件における回答結果(「輻輳海域」の例)
これらの結果から、地理的および環境条件によ
イヤーグループが有用なものであるかどうかを評
って異なる必要とされる SENC 情報の表示や非表
価する必要がある。操船シミュレータ装置を用い
示の設定をユーザー自ら行うことが求められてい
た実験等により、再現された情報レイヤーの有用
る一方、その設定方法について不安を持つユーザ
性や安全性について解析をし、ユーザーにとって
ーが多くあるという、現在の ECDIS のユーザビリ
利用価値の高い情報レイヤーを確立していくこと
ティに関する問題点が明らかになった。
とする。更に、提案する情報レイヤーグループが
より高い操作性を満たすものとして、これを確立
5.今後の展望
する必要がある。使用しているセルや表示してい
前述の問題を解決するものとして、地理的およ
る縮尺などのパラメータと各レイヤーが関連づけ
び環境条件毎に使い分けることができる情報レイ
されれば、条件に応じて自動的にレイヤーが切り
ヤーグループを想定した。図 3 で示したそれぞれ
替わる機能を実現することも可能であると考える。
の地理的および環境条件において、平均値を上回
った項目をその条件で必要とされる SENC 情報で
表 1 各情報レイヤーにおける SENC 情報
あると位置づけ、JAN-2000 においてそれを表示さ
レイヤーの種類
せることで各情報レイヤーを図 4 のように再現し
項目数
沿岸航海
18
目数を表 1 に示す。情報レイヤーの再現にあたっ
湾や灘等、陸地に囲まれた海域
23
ては、該当する海域の紙海図と同縮尺で SENC を
狭水道
23
大洋航海
23
出入港
26
投錨・抜錨
26
輻輳海域
21
視界制限状態
20
た。各情報レイヤーに表示させた SENC 情報の項
表示させることとした。本研究で想定した情報レ
図4
「輻輳海域」における情報レイヤーの再現
112
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
謝辞
本研究に協力頂いた皆様に対し、ここに感謝の
意を表します。
参考文献
(1) IMO Resolution MSC.232(82) “ADOPTION OF
THE
REVISED
PERFORMANCE
STANDARDS FOR ELECTRONIC CHART
DISPLAY AND INFORMATION SYSTEMS”,
December 12, 2006
(2) IHO S-52 "SPECIFICATIONS FOR CHART
CONTENT AND DISPLAY ASPECTS OF
ECDIS” (Edition 6.0), March 2010
113
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
東京湾海上交通流ネットワークを利用した
船舶動静の予測に関する基礎研究
学生会員○白井 友子(東京海洋大学大学院) 正会員 久保 信明(東京海洋大学)
非会員 稲田 健二(日本海難防止協会)
正会員 田丸 人意(東京海洋大学)
要旨
AIS(Automatic Identification System)情報には船舶運航管理に有効な、様々な情報が含まれている。位
置情報等の現在の状況の他、目的地、船種、大きさが含まれている。これらの情報を有効に利用することで、
輻輳海域の船舶交通の安全性を向上させることができるだろう。そこで本研究では、東京湾内を航行する船
舶を対象に、AIS 情報を利用した管理システムについて考えることとした。
東京湾は湾口から湾奥までの長さは約 70km あり、
交通流の安全確保のため航路の設定、VTS(Vessel Traffic
Service)による交通流の管理、可航行海域の制限が行われている。そのため、東京湾は広大な海域であるが、
特に大型船については船舶の航行航路はほぼ決まっている。東京湾湾口から湾奥までの間の限られた可航行
海域からノード及びリンクを設け、出発地から目的地までの航路を選定できるようにした。加えて、過去の
AIS データを基に船舶の航行航路を標準化し、得られた航路との比較を行った。抽出した航路と実際の航路
から船舶動向の予測に対応できるか検証され、実用上課題があるものの、今後のシステム構築に有効である
と考えられる。
キーワード:航行援助施設、交通、航路選定、AIS
1.はじめに
繁な水路や狭い水路においては、法令で定める船舶
AIS は、船舶の識別符号、種類、位置、針路、速
に対して信号による行き会い調整を行うとともに、
力、航行状態及びその他の安全に関する情報を自動
港長が信号所において行う信号に従わなければなら
的に VHF 帯電波で送受信し、船舶局相互間及び船舶
ないこと及び航路航行予定時刻等を港長(各港内交
局と陸上局の航行援助施設等との間で情報の交換を
通管制室)へ通報することを義務付けている。管制
行うシステムである。
水路では、一定の基準を上回る大きさの船舶に対し
2002 年以降、順次搭載の義務化が進められ、日本
て、入出航管制を行っているが、AIS の搭載の進展
では 2008 年 7 月までにすべての義務づけ対象船舶へ
を受け、AIS から得られる船舶の「長さ」情報を活
の AIS 搭載が義務化された。
用することで、管制対象船が管制水路を航行する場
AIS は船舶局相互間の衝突予防のみならず、船舶
合であっても、これまでのように反航する船舶(管
局と陸上局の航行援助施設等との間でも有効に利用
制対象船)の航行を一律に制限するのではなく、す
されている。2009 年には、VTS センターにおける船
れ違う船舶同士の長さに応じて、一定の長さ以下の
舶の動静を把握するためのツールとして、レーダー
管制対象船の航行を認めるという効率的な交通整理
や ITV(Industrial Television)等に加えて、AIS 陸
を実施するため、
日本では 2010 年 7 月より管制船お
上局が整備された。AIS を用いることで、船舶の位
よび管制対象船の基準が、
「総トン数」から
「長さ(全
置や速度といった動的情報と MMSI(Maritime Mobile
長)」に変更された。
Service Identity)番号等の船舶を識別するために
これら条件を背景に、ここでは東京湾の船舶動静
予測について考える。
必要な静的情報をリアルタイムで同時に入手するこ
とが可能となった。例えば、AIS を搭載し適切に運
2.東京湾の交通流ネットワーク特性
用している船舶については、AIS による情報の送信
によって位置通報に代えることとなった。
2010 年 7 月より、AIS の目的地情報欄の入力方法
また、港則法適用港のうち、特に船舶の通航が頻
が定められ、同入力が義務化された。
114
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
AIS 搭載船については、目的地コードを入力して
いるため、出発地や到着地の情報を AIS 情報から得
ることができる。国際信号旗又は汽笛による行き先
の表示に加え、進路を知らせるための措置として、
利用されている。入力内容には目的港、港内での進
路(係留場所等)、その他必要な情報(通過ルート等)
があり、コード化されたことにより計算機による処
理も容易となる。
また、東京湾内は大型船の可航水域が限られてい
ることや、航路や航法がローカルルールとして詳細
に定められていることにより、船型によって交通エ
リアが限られ、計画航路をある程度推定することも
可能であると考えられる。計画航路について、ノー
ドとリンクを用いたネットワークを東京湾内に設け
ることで表現し、交通流を再現するためにネットワ
ーク・シミュレーションを用いることとした。
図 1 に東京湾の交通流及び、ネットワーク図(ノ
ード及びリンク)を示す。東京湾の交通流を示した
Navy 色の線は、東京湾内を航行する AIS を搭載して
いる長さ 50m 以上の船舶の航跡である。AIS データ
図1
は 2013 年 3 月 5 日 00 時 00 分から 2013 年 3 月 9 日
東京湾の交通流及び、ネットワーク図
00 時 00 分までの 4 日間を用いている。ネットワー
クのノードをピンク色の円及びオレンジ色の円で示
し、ピンク色の円の中にはノード番号を描写した。
ピンク色のノードは発生・吸収ノードである。ノー
ド間をつなぐリンクはオレンジ色の線で示した。
3.計画航路推定
東京湾湾口から東京西航路へ向かう船舶と東京
西航路から東京湾湾口へ向かう船舶の航跡(4日間
分の AIS データより)を図 2 に水色の線で示す。ま
た、ピンク色の線は東京西航路から東京湾口へ向か
う船舶の計画航路、緑色の線は東京湾口から東京西
航路へ向かう船舶の計画航路を示している。
計画航路は、AIS データから得られた目的港が同
じ複数の船舶の航跡と図1に示したネットワークを
重ね、これら航跡が示した海域に存在するノード番
号を筆者等が読み取り、ノードの緯度経度を変針点
として設定した。また船速については、ノード間毎
の海域別船速平均値をデータベースとして作成し、
計画航路のノード番号を元にノード間(変針点間)
の移動時間等計算に利用することとした。
図2
東京西航路入り口を目的とした
計画航路と実航跡
115
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
例えば長さ 115m の貨物船の場合、目的地コード
は『>JP
TYO
S』と入力されており、『TYO』は、
F
京浜港(東京区)を目的港とする船舶であり、『S』
は、港内では Shinagawa Wharf に向かって航行する
ことを意味している。航行経路は、東京湾湾口から
京浜港(東京区)へ向かう長さ 50m 以上の船舶は浦
賀水道航路を航行しなければならないため、浦賀水
E
D
道航路を航行し、長さ 50m 以上で喫水 20m 未満の船
舶であるため中ノ瀬航路を航行することとなる。中
C
ノ瀬航路から東京湾アクアラインに向け航行する
3,000GT 以上の船舶は東京湾アクアライン東水路を
航行し、東京沖灯浮標から半径 1 マイルの円内では、
B
これを左舷に見て航行しなければならないため、東
京沖灯浮標を左舷に見て、東京西航路へ達する。
船の大きさによっては、東京湾アクアライン東水
路を航行しなくてもよい場合がある。船型ごとに航
行経路が異なる場合があることから、計画航路を船
A
型ごとに設定することとした。(図 3)
図4
表1
大型船
大型船
中型船
各通過ラインにおける船の長さに対する
平均速力(kt)
中型船
小型船
小型船
図3
通過ラインの設定
計画航路(東京西航路)
200m以上
150~200m
100~150m
100m未満
A
12.7 kt
15.1 kt
15.6 kt
12.0 kt
B
12.7 kt
12.7 kt
12.5 kt
11.6 kt
C
12.3 kt
12.2 kt
12.1 kt
11.6 kt
D
13.3 kt
13.4 kt
12.7 kt
11.6 kt
E
14.1 kt
15.5 kt
14.4 kt
11.8 kt
F
8.0 kt
11.2 kt
10.6 kt
11.2 kt
5.シミュレーションと結果
本研究における大型船は長さ 160m 以上の船舶、
中型船は長さ 80m 以上 160m 未満の船舶、小型船は長
図 5 に任意の船の航跡とネットワークから得られ
さ 50m 以上 80m 未満の船舶とした。図 3 中の緑色の
る計画航路を示す。
線は東京湾湾口から東京西航路へ向かう船舶の計画
この船は浦賀水道航路・中ノ瀬航路・東航路を通
航路、青色の線は東京西航路から東京湾湾口へ向か
過後東京沖灯浮標をかわして東京西航路に航行した。
う船舶の計画航路とする。東京西航路以外の行き先
図 5 は、東京湾口から東京西航路までの計画航路を
についても同様に計画航路を設定する。
水色で、任意の船の実際の航跡を青色と黄色で示し
た。航跡プロット図の青色が計画航路との偏差、速
4.計画航路における予定速力の設定
力の比較を行った位置である。なお、図 5 中の赤い
速力は、図 4 に示す各通過ラインにおける平均速
点は灯台及び灯浮標等、緑色の枠は航路である。図
力を表 1 のとおり船の長さごとに設定した。平均速
6 と図 7 に、この船の計画航路に対する偏差・速力
力は AIS データ(2013 年 10 月の 1 か月分)を基と
の変化を示している。横軸は東京湾湾口を出発地と
している。
した航行距離とし、縦軸が偏差、速力変化を示す。
116
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
6.おわりに
本研究では、東京湾の交通流ネットワークを作成
し、そこから計画航路を抽出することで、船舶動静
の予測を行うため、実航跡との比較を行った。
AIS の目的地コードを用いて、ネットワークから
計画航路を作成し、予定速力を設定した。
計画航路と実際の航路から船舶動向の予測に対
応できるか検証され、実用上課題があるものの、今
後のシステム構築に有効であると考えられる。
図5
図6
任意の航跡図と予定航路
計測された速力(青線)と
予定速力(橙色の線)の変化
図7
予定航路からの偏差
117
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
東日本大震災で被災した隣接 2 隻の大型石炭船に来襲した
津波および船体に作用する津波波力に関する一考察
正会員
正会員
○榊原
久保
繁樹(東海大学)
非会員 阿部 郁男(常葉大学)
雅義(神戸大学名誉教授)正会員 津金 正典
要旨
東北地方太平洋沖地震津波の来襲に伴い大きな被害を受けた揚炭桟橋で係留・荷役中であった隣接 2 隻の
大型石炭船の挙動につき、可能な限り入手できた被災当時のデータと被災状況を把握・整理した。合わせて
津波シミュレーションを実施して津波波力に関する考察を通して 2 隻の大型石炭船の挙動の違いを検討した。
キーワード:港湾・係留、津波、船体運動、海難、海洋工学
P-Maru
1.研究目的
PINE WAVE
(550,2000), 229-290
S-Maru
SHIRAMIZU
著者らは東北地方太平洋沖地震津波来襲に伴い
津波データ参照ポイント
(250,1900), 223-288
被災したS港原油桟橋で荷役・係留中であった VLCC、
2200
O港では係留避泊に成功したアフラマックスタンカ
2100
ー(10 万トン級原油タンカー)、また H 港で係留・荷
10
12 14
桟橋
役中に大きな被害を受けた大型石炭船の挙動につき、 )
m(1900
当時の津波および船体状況を把握すると共に、津波
北
1700
な被災状況把握を試みてきた(1)(2)(3)。
1600
東北地方太平洋沿岸の他の港でも多数の大型船
港口
港口
14
10
12
02
8
14
4
12
6
10
1500
0
の被災実態が報告されているが(4)、本研究ではS港
14
14
南1800
を行って被災当時の船体挙動の再現を通して定量的
24
8
2000
シミュレーションおよび船体動揺シミュレーション
0
6
100
200
300
400
500 600
東西(m)
700
800
900
1000
図中数値:水深(m)
で当該地震津波来襲に伴い係留・荷役中に大きな被
害を受けた隣接した 2 隻の大型石炭船の挙動や来襲
図1
地震津波来襲時の大型石炭船の桟橋係留状況
した津波状況など可能な限り入手できた被災状況を
整理した。そして津波シミュレーションを行うこと
表1
地震津波来襲時の大型石炭船の諸元(2 隻)
により船体周りの流況を詳細に把握すると共に、そ
Coal carrier
れぞれの船体に作用する津波波力に関する考察を通
DWT
Loa(m)
Lpp(m)
B(m)
D(m)
dm(m)
Disp(ton)
GM(m)
KG(m)
kx(m)
ky(m)
kz(m)
して、2 隻の大型石炭船の挙動の違いについて検討
を行った。
2.研究内容
図 1 に当該地震津波来襲時の 2 隻の石炭船
(P-Maru, S-Maru)の桟橋係留状況を示す。図中には
桟橋前面の水深分布を合わせて示している。また表
1 には被災当時の 2 隻の船体諸元を示す。船首方位
は共に 225deg でほぼ西向きであり、係留索は 16 本
係留で、25m 間隔で防舷材が取付けられていた。図 1
に示すように、港口は P-Maru 後方北東側(大型船用)
および南東側である。また桟橋前面では水深 14m で
P-Maru
88,279
229.9
220.0
38.0
19.9
10.75
76,000
6.07
10.50
70.40
12.46
70.40
S-Maru
91,433
235.0
226.0
43.0
18.6
12.7
102,650
7.83
10.65
72.32
14.10
73.32
P-Maru は荷役中に津波来襲を受けた。揚炭機(ア
ンローダー)は No.3, 5 ホールドに挿入されて当初
あるが南側には水深 8m の浅水域があり、S-Maru 前
荷役を行っていたが、地震による停電によりアンロ
方には陸岸があり急に浅くなっている。
118
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ーダ先端部はホールド内に残された。津波高さは港
(2) 図 2 に P-Maru 周りの津波の水位変動および
内験潮所で 9mが観測され防波堤や桟橋を越える越
流速の時系列結果を示す。津波の水位変動は
流を生じた。船尾からの押し波来襲時に前方へ移動、
15:46:30(3630s)から急激に再上昇し、東西流速は
その後後方へ移動と合わせて大きな右舷回頭を伴っ
3900s 頃まで西向きとなっている。一方南北流速は
て、本船はアンローダ先端部を引きちぎり係留索 16
船体中央と船首ではよく一致しているが、船尾側で
本全数が破断または巻き出されて桟橋から流出・港
は違う向きに変動している。一方図 3 に S-Maru 周り
内を漂流した。一方 S-Maru は、入港直後でほぼ満載
の津波計算結果の一部を示すが、南北流速は船体中
状態(アンローダーはホールドに挿入されていなか
央および船首尾で同様な傾向で、3850s(15:50:10)
った)で津波来襲を受けた。最終的には津波来襲に
頃までは船体を桟橋に押し付ける向きに作用してい
伴い係留索 16 本全数が破断または巻き出され、桟橋
る。合わせて図 4 には押し波来襲時 15:46:30 頃の水
から流出して港内を漂流しが、P-Maru に比べ比較的
位変動分布を示す。南東側港口から船尾に到達して
長時間桟橋に留まり、また大きな右舷回頭は生じず、
いると共に北東側港口や東側からも本船に到達して
主に前後方向の移動であった。
いる様子がわかる。図 5 には P-Maru が船尾方向へ移
当該隣接 2 隻の大型石炭船の当該地震津波来襲か
動を開始する時刻 15:48:30(3750s)における水位
ら桟橋流出するまでの挙動の違いを見出すため、津
変動および流速の分布を示す。水位変動は概ね港口
波状況や船体挙動に関するヒアリング調査を詳細に
や防波堤のある東側が高いが、港内の浅水域にも高
行った。また津波シミュレーションを地震発生時
い部分が生じている。またこれに伴い東西流速の折
14:46~16:16(5400s) 間の 1 時間 30 分を実施して、
り返し点が P-Maru 船体中央に位置し、また P-Maru
桟橋周りの津波状況および 2 隻の船体に作用する津
船尾の桟橋南東端には南北流速のマイナス(南向き)
波波力の違いについて検討した。
が生じている。2 隻の石炭船周りではかなり複雑な
3.主要な結論
流況となっていた可能性がわかってきた。
(1) 表 2 にヒアリング調査から得られた 2 隻の大
水位(m) P-Maru
8.0
型石炭船の挙動や津波状況などについて時系列的に
水位(m)_P-Maru_船体中央
水位(m)_P-Maru_船尾
水位(m)_P-Maru_船首
(m)
まとめた。表 2 から P-Maru には津波は 15:46:30 に
4.0
到達し、高々3 分程で本船はアンローダーを引きち
ぎり港内を漂流し始めた。一方 S-Maru は、P-Maru
0.0
流出後も桟橋前面に留まっていたことがわかった。
表2
15:41:18
遠方の津波視認
15:42:42
南航路の遠方に白波が接近するのを視認
15:44:26
乗組員に船橋集合を指示
15:45:03
沖防波堤(南航路側)の越波を初認
15:45:26
沖防波堤全域で越波を視認
15:45:40
南航路口から津波侵入
15:46:30
津波南東からP-Maruに到達
15:46:39
津波、北東や東からも来襲
15:46:40
P-Maru大きく動揺
15:46:45
P-Maru, Sway沖側へ、Heave発生
15:47:01
P-Maru, Sway桟橋側へ、Heave発生
15:47:08
P-Maru, Sway沖側へ、Heave発生
15:47:14
P-Maru, Sway沖側へ、Heave発生
15:47:21
P-Maru, 5番ホールドのアンローダー先端の振動開始
15:47:25
P-Maru, Sway沖側へ
15:47:34
津波、P-Maru船尾側の桟橋に到達
15:47:48
P-Maru, 5番アンローダーがきしむ
15:47:57
桟橋上津波が覆う
15:48:10
P-Maru, 3番ホールドアンローダーの引きちぎれ落下(Surge最大)
15:48:12
5号埠頭北側及び北防波堤付近でものすごい水しぶきが上がる
15:48:30
P-Maru, Surge船尾側へ
15:48:36
5号埠頭上を津波が船体に向けて押し寄せる
15:48:42
15:49:00
15:49:08
15:49:15
15:49:27
15:49:35
15:49:43
15:49:49
0.0
P- Maru , S- Maru および津波状況( 2 0 1 1 .3 .1 1 )
3300
3400
3500
3600
3700
3800
3900
4000
4100
(s)
4200
3700
3800
3900
4000
4100
4200
E流速(m/s) P-Maru
2.0
(m/s)
1.0
地震津波来襲時の船体および津波状況
時刻
3200
E流速(m/s)_P-Maru_船体中央
E流速(m/s)_P-Maru_船尾
E流速(m/s)_P-Maru_船首
3200
3300
3400
3500
3600
-1.0
(s)
-2.0
2.0
(m/s)
1.0
0.0
N流速(m/s) P-Maru
N流速(m/s)_P-Maru_船体中央
N流速(m/s)_P-Maru_船尾
N流速(m/s)_P-Maru_船首
3200
3300
3400
3500
3600
3700
3800
3900
4000
4100
4200
-1.0
(s)
-2.0
図2
P-Maru 周りの津波シミュレーション時系列
(2011 年 3 月 11 日 15:39:20-15:56)
2.0
(m/s)
1.0
P-Maru, 5番ホールドアンローダーが引きちぎられる
0.0
P-Maru, 船体後方へ移動
P-Maru, 5番ホールドのアンローダー垂直部、甲板上のハッチカバー上を
N流速(m/s) S-Maru
3200
N流速(m/s)_S-Maru_船体中央
N流速(m/s)_S-Maru_船首
N流速(m/s)_S-Maru_船尾
3300
3400
3500
3600
3700
3800
3900
4000
4100
4200
-1.0
引きずる
北防波堤方向からの津波侵入が続く
(s)
-2.0
P-Maru, 船首が右舷側に振れる
P-Maru, 5番ホールドのアンローダー垂直部がちぎれる
P-Maru, 3番ホールドのアンローダー垂直部がちぎれる
P-Maru, 船首が桟橋法線に対し45度ぐらい右方向に向く
図3
P-Maru, 5番ホールドアンローダーの先端が引きちぎりられ海面へ落下・
着水
S-Maru 周りの津波シミュレーション時系列
(2011 年 3 月 11 日 15:39:20-15:56)
S-Maru, 桟橋係留続行
119
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
S-Maru
2200
2100
P-Maru
1.52
2.5
0.5
2000
2000
3
)m1900
(北
南1800
1700
)m1900
(北
南1800
6
6.2
3.2
1700
0.5
1.5
2
1 2.5
1600
3.5
3.1
3
2.9
2.8
2.7
2.6
2.5
5.4
5.5
5.3
2.4
5.2
5.1
2.3
5
4.9
5.6
2.2
4.8
4.7
4.6
2.1 4.2
4.5
5.7
5.85.9
4.4
4.3
4.1
4
3.9
3.8
3.7
3.5
3.6
3.4
3.3
1600
1500
0
100
200
300
400
500
600
東西(m)
700
800
900
1500
1000
0
100
6.1
200
(a) 15:46:30(3630s)
S-Maru
1.52
2.5
0.5
1
3
2000
)m1900
(
北
南1800
)m1900
(北
南1800
3.5
0.5
2
11.5
2.5
1600
1700
3
100
200
300
400
S-Maru
500
600
東西(m)
700
800
900
900
1000
900
1000
-1
-1.5
-2.5
-3
-3.5
-4
-2
-1.5 -1.5
-3
-2.5
-3.5
-4 -2
-4.5
-1
-2
-1.5
-2.5
0
100
-2.5
200
300
400
500 600
東西(m)
700
800
(b) EW-Current(m/s)
P-Maru
S-Maru
2200
1.5 2
2.53
10.5
11.5
22.5
3
2100
2000
2000
)m1900
(北
南1800
)m1900
(北
南1800
3.5
2 1.5
2.5
1.52
10.5
-0.5
-1
1
-0.5
0.5
4.5 4 3.5 3
2.5
5
3.5
43
0
0.5
0
1700
0.5
1.5
1 2.5
23
0.5
1600
800
P-Maru
-3.5
-2.5
-3
1500
1000
P-Maru
2200
1700
700
-4
-3.5
-3-3 -2.5
-3.5
-2
-2
-3
-1.5 -2.5
(b) 15:46:40(3640s)
2100
500 600
東西(m)
1600
1500
0
-0.5
-1
2100
2000
1700
400
(250,1900), 223-288
S-Maru
2200
2100
-0.5
-1
-2-1.5
1600
1
1500
1500
0
100
200
300
400
500 600
東西(m)
700
800
900
0
1000
100
(c) 15:46:50(3650s)
図4
300
(a) Elevation(m)
P-Maru
2200
6.1
3.3
3.4
3.5
3.6
3.7
3.8
3.9
44.2
5.9
4.1
4.3
4.4
4.5
4.6
4.7
4.8
4.9
55.3
5.1
5.2
5.8
5.4
5.55.65.7
0.6
0.7
0.8
0.9
1.2
1 1.1
1.3
1.4
1.5
1.6
1.7
1.8
1.9
22.3
2.1
2.2
2.4
2.5
2.6
2.7
2.8
2.9
3.1
3
3.2
2100
1
P-Maru
S-Maru
2200
200
300
400
500 600
東西(m)
700
800
900
1000
(c) NS-Current(m/s)
大型石炭船周りの水位変動分布(2011 年 3 月
図5
11 日 15:46:30-15:46:50, 押し波来襲時)
大型石炭船周りの水位変動・流速分布
(2011 年 3 月 11 日 15:48:30(3750s))
4.参考文献
(1) 榊原繁樹・阿部郁男・津金正典・久保雅義:東
(3) 榊原繁樹・阿部郁男・津金正典・久保雅義:東
北地方太平洋沖地震津波来襲時の係留 VLCC の
北地方太平洋沖地震津波来襲時の桟橋係留大
挙動再現について, 日本航海学会論文集, 第
型石炭船の挙動再現について, 日本航海学会論
127 号, pp.57-68, 2012.
文集, 第 131 号, pp.89-99, 2014.
(4) (社)日本海難防止協会:大地震及び大津波来襲
(2) 榊原繁樹・阿部郁男・津金正典・久保雅義:東
北地方太平洋沖地震津波来襲時のアフラマックスタンカー
時の航行安全対策調査報告書
係留避泊に関する一考察, 日本航海学会論文集,
る船舶避難行動と被災状況等に係る基礎調査-,
第 129 号, pp.19-30, 2013.
2012.3.
120
-津波影響によ
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
島嶼地域における船舶を活用した大規模災害時の対応につ
いて
学生会員○大野遼太郎 (広島商船高専専攻科) 正会員 水井
正会員 辰己 公朗(広島商船高等専門学校) 正会員 小林
真治(広島商船高等専門学校)
豪(広島商船高等専門学校)
要旨
島嶼地域において橋梁が建設されていない場合、人や物資の移動は船舶が絶対的な手段である。想定され
る南海トラフ地震のような大規模災害時には船舶を活用した災害対策の整備を進める必要がある。
そこで、災害時における船舶の持つ輸送機能を最大限に活用するために「携帯電話を利用した船舶と港湾
施設のマッチングシステム」を考案した。本研究では「携帯電話を利用した船舶と港湾施設のマッチングシ
ステム」の開発及び本システム利用に関して社会実験を行い実用性の検証を試みたので報告する。
キーワード:港湾・係留、大規模災害時の港湾施設利用、大規模災害時の対策整備、災害時の通信
1.はじめに
地域において、人や物資の移動は船舶が絶対的な手
1.1
段である。よって、南海トラフ地震のような大規模
背景
日本列島はプレートテクトニクスの観点から、非
災害時には船舶を活用した災害対策の整備が最重要
常に地震が発生しやすい場所に位置しており、その
であると考える。つまり、南海トラフ地震のような
脆弱性から地震の対策は必要不可欠である。そのよ
大規模災害時の対応を、大崎上島を一つの事例とし
うな日本において、太平洋側近海の南海トラフにお
て船舶活用から見た災害軽減手法の検討を行った。
いて、国難といえる巨大地震の発生が危惧されてい
る。
南海トラフ地震は、日本が位置するユーラシアプ
レートへの、フィリピン海プレートの沈み込みが原
因とされている地震である。その規模は M8~9 クラ
ス、
発生確率は 30 年以内に約 70%(1)とされている。
また、最悪のケースで、全壊及び焼失棟数約 2,382
千棟、死者数約 323 千人(2)の被害が予想されてい
る。これらに加え、ライフラインや施設の損傷によ
る二次被害も想定される。図 1-1 に南海トラフの巨
大地震モデル検討会による南海トラフ地震の最大値
図 1-1
南海トラフ地震の最大値の震度分布図(3)
の震度分布図(3)を示す。
1.2
広島商船高等専門学校の位置する大崎上島は瀬
目的
島嶼沿岸地域における大規模災害時の因果フロ
戸内海のほぼ中央に位置する人口 8,227 人、面積
43.29km²の離島である。大崎上島町は内閣府により、 ーを図 1-2 に示し、その対策を考慮した因果フロー
南海トラフ地震防災対策推進地域指定市町村に指定
を図 1-3 に示す。これらは社会技術論(5)の手法に
されている。大崎上島は最大震度 6 強の揺れが発生
より図示したものである。因果フロー図を作成する
すると考えられ、死者 35 名、負傷者は死者の約 10
目的は、問題の原因について着目すべき問題点を整
倍の 354 名、要救助者 29 名、帰宅困難者 309 名、家
理することにあり、着目すべき問題点を抽出するた
屋は全壊 810 棟、半壊 2,928 棟、津波発生後の液状
めに連鎖している様々な因果関係の根本的な要因を
化面積は総面積 43.29 km²のうち 12.12 km²という被
特定することが可能となる。
害予想 が挙げられている。
図 1-2 は南海トラフ地震のような大規模な震災が
(4)
大崎上島のような橋のかかっていない島嶼沿岸
発生した場合に、大崎上島が離島であることを念頭
121
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
に、起こりうる事象の因果ネットワークの流れを概
限に活用するために「携帯電話を利用した船舶と港
括的に整理している。図中の実線の矢印は正の因果
湾施設のマッチングシステム」を考案した。
関係にあることを表す。連鎖している様々な因果関
本論文は「携帯電話を利用した船舶と港湾施設の
係を把握することにより、どのような被害が生じる
マッチングシステム」を完全離島である大崎上島を
のか、また、それらの対策を検討することが可能と
その事例として開発した。また、同システムを利用
なる。
した社会実験を行い実用性の検討を行うと共に、ア
図 1-3 は、抽出された問題に対する対策を示した
ンケートによる主観的、操作ログ及び実験シナリオ
楕円を追加したものである。図中の破線の矢印は負
の比較による時間遅れに関する評価を行うことを本
の因果関係にあることを表す。対策(楕円)の事象
研究の目的とする。
が機能するほど、接続された事象の被害を減少させ
2.システムの概要
ることができることを示している。
2.1
考えうる対策を以下の三項目に整理した。
船舶と港湾施設のマッチングシステム
① 島内住民の島外避難及び物資輸送のための方法
島嶼地域の住民の移動手段や物資の輸送手段が船
② 緊急医療体制と最小限の緊急物資の準備と輸送
舶に限られることは前述の通りである。また地震や
③ 災害時の緊急通信体制
津波等の影響で船舶や港湾施設が使用不可能になる
なお、本論文においては、①島内住民の島外避難
ことも考慮しなければならない。災害時における孤
及び物資輸送のための方法に関して、一定の知見が
立を避けるためには、絶対的な移動輸送手段である
得られたので、①について報告する。
船舶を効率よく、
迅速に活用することが大切である。
そのためには災害前から使用可能である船舶をリス
トアップし、それらに対応した港湾施設がすぐに把
握可能なマッチングシステムの運用を提案する。こ
れにより、活用ニーズに応じて状況にマッチした船
舶を活用することができるようになるのではないか
と考えた。
マッチングシステムとは、岸壁の名称、座標、水
深及び対象船舶等の港湾データベース並びに船舶諸
元及び運航情報が得られる船舶総合データベースの
二種類のデータベース情報を基に、高速で条件にマ
図 1-2
島嶼地域における大規模災害時の
ッチする船舶を特定するためのシステムのことであ
因果フロー図
図 1-3
る。図 2-1 にマッチングシステムの概略を示す。
島嶼地域における大規模災害時の
図 2-1
マッチングシステム概要
対策を考慮した因果フロー図
2.2
データベース
災害時における島内住民の島外避難及び物資輸
マッチングシステムにおける港湾データベース
送のための方法として、船舶の持つ輸送機能を最大
はその港湾の種類、施設番号、名称、緯度経度によ
122
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
る場所、延長やエプロン幅、水深といった港湾施設
の諸元、係船柱や防舷材といった附帯設備や船席数
といった情報からなっている。このデータは主に自
治体が保管している港湾施設の設計図から得た情報
図 2-2
を基に作成している。また、設計図の残っていない
現状報告の操作フロー
ものや、老朽化した図面、または埋め立て等地形の
変化により値が変化しているものは 2015 年 1 月の実
測で得た値を使用した。大崎上島の事例では 69 件の
港湾データを整理した。
船舶総合データベースは、船舶の総トン数、全長
や型幅、喫水といった船舶の諸元と、運航形態、運
航会社と船主の連絡先、積荷の種類、デリックウィ
ンチなどの荷役設備、荷役能力といった船舶の運航
に関するデータにより構成されている。大崎上島の
例では 160 件の船舶データの仮登録を行った。この
登録・編集・削除は自由にできる設計とした。
2.3
現状報告機能
本システムは船舶のリアルタイムな運航状況を
把握するために、携帯端末からメインサーバーに
GPS による位置情報や船舶の運航情報を送信するこ
とができる「現状報告」が可能である。図 2-2 に現
状報告の操作フロー図を示す。QR コードを用いる
図 2-3
ことで、パスワード等を入力しなくても専用 web ペ
現状報告の完了画面
ージにアクセスすることができるため、災害時にお
いても簡単にログインすることが可能である。図 2-3
3.社会実験
に現状報告の完了画面を示す。
3.1
社会実験概要
なお、このメインサーバーは災害時に使用できる
本システムを評価するとともに実用性を検証す
ように安全性の強固なレンタルサーバー方式を採用
るため、平成 27 年 8 月に自治体大崎上島町と 10 の
した。
船会社・団体の 41 隻
(登録した 160 隻の内の 41 隻)
「現状報告」により送信された情報はデータベー
の船舶にご協力いただき、社会実験(運用試験)を
スの情報を自動で更新し、マッチングの算出に反映
行った。本実験は大規模災害が発生したと仮定し、
するため、リアルタイムにおけるマッチングの最適
災害時における自治体と広島商船高等専門学校が連
解を算出することができる。この機能により本シス
携し、
「携帯電話を利用した船舶と港湾施設のマッチ
テムは被災時における船舶への緊急運航要請の判断
ングシステム」を活用した初動訓練及び実用性の検
基準と成り得る。
証を目的としている。
なお、このマッチングの最適解は、港湾施設の延
社会実験は、未搬送の要救助者の発生を仮定しマ
長と船舶の長さの適合及び港湾施設の水深と船舶の
ッチングシステムを起動し、運用を行い、シナリオ
喫水から見た物理的な適合をまず判定する。つぎに
に従い社会実験を行う。協力船会社の船舶はマッチ
携帯端末を操作した時点で端末の GPS 機能から船
ングシステムにより、現状報告を行い、自治体から
舶の位置情報と港湾施設の位置情報比較から相対距
の返事を受信するまでとする。表 3-1 に想定する震
離を算出し、船舶毎に距離優先順位を表示する。
災規模や被害予想等前提条件を示す。図 3-2 に社会
実験の流れを示す。
123
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表 3-1
社会実験前提条件
震源
南海トラフ
マグニチュード
M9.0
震度
震度 6 強
最高津波水位
3.1[m]
最大波到達時間
372[分]
津波影響開始時間
30[分]
負傷者
354[人]
重傷者
43[人]
た。講演時に詳細を報告する。
5.まとめ
本研究は人や物資の移動は船舶が唯一の輸送手
段である島嶼地域を対象に、大規模災害時における
船舶を活用した災害対策の一例を示した。本研究に
よりつぎに示す知見が得られた。
(1) 災害時における船舶の持つ輸送機能を最大限に
活用するために「携帯電話を利用した船舶と港湾施
設のマッチングシステム」を開発した。
(2) 実際に自治体と船会社に協力いただき、実用性
を検証する社会実験を行いその有効性が確認できた。
今後の課題は、操作時間の更なる短縮、協定船舶
が増加した際の課題抽出の検討が残されている。
参考文献
図 3-2
(1)地震調査研究推進本部:南海トラフで発生する
社会実験の流れ
地震,
つぎに社会実験で協力をいただいた 41 隻の代表
http://www.jishin.go.jp/main/yosokuchizu/kaiko/k
船舶職員及び自治体職員 6 名の協力により実施した
_nankai.htm,2015/03/25.
実験のシナリオを表 3-2 に示す。同表は開発システ
(2)内閣府:南海トラフ巨大地震の被害想定につい
ムの実用上の課題確認の視点から災害想定時間を短
て(第二次報告)~施設等の被害~【被害の様
縮して機能の一部を確認・検証した。
相】,http://www.bousai.go.jp/jishin/nankai/taisak
u_wg/pdf/20130318_shiryo2_1.pdf,
表 3-2
20015/03/25.
実施した社会実験のシナリオ(一部)
社会実験の実施時間
災害対策本部
(連携自治体総務課に設 協定船舶Aの例
置)
震源:南海トラフ
震災規模:M9.0
震度:6強
災害発生(想定)
災害対策本部の立ち上げ 避難・緊急出航
~30[分]
~5[分]
想定災害フェーズ
(3)
内閣府:南海トラフの巨大地震モデル検討会(第
二次報告)強震断層モデル編
災害発生(想定)
津波影響開始想定時刻
デルと震度分布について-,
http://www.bousai.go.jp/jishin/nankai/model/pdf/
マッチングシステムに
マッチングシステムで船
より現状報告
舶に連絡
報告:「要請による運
津波影響開始想定時刻 通信:「協定船舶は現状
行可能」
報告をして下さい」
20120829_2nd_report05.pdf,
2015/07/27.
(4)広島県ホームページ:南海トラフ巨大地震等に
~180[分](3時間経過) ~10[分]
各報告を受け、マッチン
グシステムにより配船の
全ての地区にて床下浸水 全ての地区にて床下浸
準備を行う
家屋が出現し始める
水家屋が出現し始める
~15[分]
~240[分](4時間経過)
~300[分](5時間経過)
~20[分]
~360[分](6時間経過) ~25[分]
津波最大波到達
3.2
-強震断層モ
津波最大波到達
よる広島県地震被害予想調査結果の概要,
http://www.pref.hiroshima.lg.jp/soshiki/4/1181640
通信:「船舶○○は要救
助者搬送のため、岸壁A 報告:「船舶○○は、
へ着岸、要救助者を受け 緊急搬送のため、岸壁
入れB港に搬送せよ」
Aへ向かう」
340970.html,2015/03/25.
(5)堀井秀之;社会技術論,pp72-78、東京大学出
通信:「船舶○○、岸壁 報告:「船舶○○は、
Aに到着了解」
緊急搬送のため、岸壁
Aへ到着した」
マッチングシステムに
より現状報告
通信:「協定船舶は現状
報告:「要請による運
報告をして下さい」
行可能」
版会,2012.
社会実験の評価
本システムを試験運用した社会実験は携帯端末
等からシステムを利用した約 40 名のアンケート評
価及び運用の際の携帯端末から管理システムに届い
たタイムヒストリーの時間遅れについて分析を行っ
124
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
沿岸におけるうねり性波浪による水位変動の検証
正会員○河合 雅司(富山高等専門学校)
非会員 北村 康司(株式会社ソニック)
非会員 後藤 佑介(新潟港湾空港調査事務所)
非会員 川口 清司(富山大学)
要旨
富山湾沿岸では、周期 10 秒以上、波高数 m 程度のうねり性波浪が押し寄せ、たびたび災害が発生している
る。富山高等専門学校では、波浪災害を防止するために 1967 年以来、この波の研究を続けている。その結果、
うねり性波浪により、富山湾沿岸で数分周期の水位変動(長周期波)が生じることが分かっている。
この数分周期の水位変動は、海水の固有振動により生じていると考えられるが、その発生メカニズムにつ
いて、造波実験を行うことにより詳しく調べた。その結果、水平な浅瀬域にうねりが侵入すると浅瀬域で固
有振動が生じることを確認した。さらに、沖合に突き出た水平浅瀬域では、浅瀬域の長さの半分を1波長と
する平均水位の変動が生じることが分かった。そして、うねり性波浪による平均水位の上昇は沿岸部の越波
現象に重要な役割を果たしていると考えられる。
キーワード:造船・海洋工学、港湾・係留、うねり性波浪、水位変動、固有振動
1.はじめに
則波が水平床に侵入することにより、水平床上で長
周期の水位変動が生じるかどうか確かめた。これら
富山湾沿岸では、例年 10 月から 3 月にかけて、
の結果について、以下に報告する。
周期 10 秒以上、波高数 m 程度のうねり性波浪が押し
寄せ、たびたび波浪災害が発生している。このため、
2.水路による造波実験
このうねり性波浪は地域の住民から寄り回り波と呼
ばれて警戒されており、富山高等専門学校射水キャ
2014 年 8 月 11 日から 15 日にかけて、港湾空港技
ンパスでは、船舶の安全運航等の視点からこの波の
術研究所の 35m 水路を使用して造波実験を行った。
研究に取り組んでおり、また新潟港湾空港調査事務
長さ 35m、幅 0.6m の水路に水を入れて深さ 0.6m と
所では、港湾構造物の効率的かつ効果的な整備・維
し、長さ 2m、幅 0.6m、高さ 0.4m の台を設置し、台
持管理を目的として富山湾のうねり性波浪を捉え、
には長さ 1.52m のスロープを設置して実験を行った。
研究を進めている。そして、互いの既存の研究成果
Fig.1 に実験の概要図を示す。
の活用や研究を進める上での着眼点等について、情
水路内に造波装置を使用して、波長 1m~3m、波高
報交換、意見交換を図りながら研究を進める意義は
3cm~9cm の 6 種類の規則波を 10 分間発生させ、4
高いと考え、本年より、共同研究を実施している。
台の波高計(波高計 1:沖合, 波高計 2:湾口, 波高計
吉田(1987)は、1981 年 12 月 16 日に富山湾に押し
3:湾中央, 波高計 4:湾奥,)で、0.05 秒毎に 10 分間
寄せた寄り回り波を航空機から観測していた時に、
水位観測を実施し1波高計につき 12000 個のデータ
魚津から富山へかけての沖合で寄り回り波よりもは
を得た。この結果、波高 9cm、波長 3m の波を水平床
るかに周期の長い長周期波動が沿岸部に存在してい
に侵入させた場合のみ、水深 20cm の水平床上で、周
(1)
ることを発見した。 また、富山新港内の冨山高等
期 6.7 秒の水位変動が存在し、その振幅は水平床上
専門学校臨海実習場の水位観測データから、富山湾
(ch2~ch4)で大きく、沖合(ch1)で小さかった。
沿岸に寄り回り波が押し寄せている時に、約数分周
期等の水位変動(長周期波)が存在することが分かっ
ている。(2)(3)
うねり性波浪が富山湾に侵入することにより生
じる数分周期の長周期波は、船の係留や港湾の構造
物に影響を及ぼすと考えられるが、その発生原因に
ついては、十分な検証はなされていない。そこで、
造波水路や平面水槽を用いて、造波実験を行い、規
Fig.1
125
The description of wave making experiment
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
Fig.2 Power spectra of water levels at ch1,ch2,ch3 and ch4
Black, blue, purple and green show spectra of ch1, ch2, ch3 and ch4 respectively
Fig.3 The cross section of plane water tank for wave generating experiment
波高計(ch1~ch4)で観測したデータをスペクト
Fig.3 に示し、波高計の設置位置を Fig.4 に示す。
ル解析した結果を Fig.2 に示す。Fig.2 において、
幅 5.6m、長さ 13.0m、深さ 0.21m の水平床に波長
黒は ch1(沖)、青は ch2(湾口)、紫は ch3(湾中)、
3m、波高 7cm の規則波を 16 分間入射し、0.05 秒
緑は ch4(湾奥)のスペクトルを示している。
毎に波高計で水位を観測した。最初の 600 個(30
(4)
長方形湾の振動周期 T は、次式 で与えられる。
T=α
(m=0,1,2,・・・・・)
α=
L:湾の長さ(m),
(1)
,
B:湾の幅(m),
2
g:重力加速度(9.8m/s ),
秒間)のデータは無視し、それ以降の 16384 個のデ
C=B/L
H:湾の水深(m),
α:湾口係数
ここで、L=2m, B=0.6m, H=0.2m, m=0 とすると、
(1)式よりα=1.2056, T=6.9 秒
を得、実験で得ら
れた固有振動周期 6.7 秒とほぼ完全に一致する。
3. 平面水槽による造波実験
2015 年 6 月に新潟港湾空港技術調査事務所の平
面水槽(56.5m×6.3m)を用いて、造波実験を行った。
港湾空港技術研究所の 35m 水路は、幅が 0.6m であ
り側面壁の影響を受けやすいので、幅が 5.6m あり、
側面が消波構造になっている平面水槽を用いて同
様の実験を行い、水平床上で固有振動が生じるか
Fig.4 Floor plan of plane water tank
in wave generating experiment 1
どうか検証した。使用した平面水槽の断面図を
126
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ータを処理してスペクトルを求めた。
水位データの取得方法は造波実験 1 とほぼ同じ
ここでは、平面水槽内に構造物を何も設置しな
である。なお、これらの実験に使用した平面水槽
い上述の実験を造波実験 1 とする。次に、平面水
の写真を Fig.6 に示す。
槽内に仕切りを設け、幅 2m、長さ 2m、水深 16cm
の水平床を設置し、2m 四方の水平床に波長 3m、波
高 7cm の規則波を入射させた。この造波実験にお
ける波高計設置位置を Fig.5 に示す。そして、こ
の実験を造波実験 2 とする。造波実験 2 における
Fig.6 The plane water tank used in wave
generating experiments
Fig.5 Floor plan of plane water tank
The upper is dry water tank
in wave generating experiment 2
The lower is a scene of a experiment
58.5sec.
Fig.7 Power spectra of water level of channel 16 in wave generating experiment 1
273.1sec.
Fig.8 Power spectra of water level of channel 16 in wave generating experiment 2
127
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
造波実験 1 と造波実験 2 において、波長 3m、波
なり、波長 3m、波高 7cm の規則波を入射させた場
高 7cm の規則波をそれぞれの水平床に入射して得
合、岸側の平均水位の上昇は 38mm であった。これ
られた水位データをスペクトル解析した結果を
は、波長 300m、波高 7m のうねりが沖へ突き出し
Fig.7 と Fig.8 に示す。Fig.7 から、波長 3m、波
た水深 16m 程度の水平浅瀬域に侵入した場合、沿
高 7cm の規則波を水平床に入射することにより、
岸部の平均水位が 3.8m 上昇することを意味して
58.5 秒の長周期水位変動が生じることが確認で
おり、うねり性波浪の侵入による越波現象におい
きた。そして、波長 3m、波高 5cm の波を入射させ
て、この水位上昇が大きな役割を果たしていると
た場合も同様の結果が得られた。これは、長さ
考えられる。
1300m、水深 21m の水平浅瀬域に波長 300m、波高
水平床に規則波を侵入させることにより生じる
数 m の波が侵入すると、水平浅瀬域で周期約 10
固有振動や平均水位の変動について、平均床の長
分の水位変動が生じることを意味している。また、
さや水深、侵入させる規則波の波長や波高を変え
造波実験 2 において、Fig.8 から長周期の水位変
て詳しく調べることは、今後の課題である。
動が水平床上で生じていることが確認できるが、
謝辞
この水位変動の発生メカニズムについては不明で
ある。しかし、水深 16cm の水平床上の平均水位が
本研究において重要な役割を果たした港湾空港
Fig.9 に示すように変動していることが明らかに
技術研究所の 35m 水路での造波実験を実施して頂
なった。ch.16 の水位は 38mm となっており、これ
いた、港湾空港技術研究所海洋研究領域波浪研究
は長さ 200m、水深 16m の水平浅瀬域に波長 300m、
チームの平山克也博士、加島寛章博士、長沼淳也
波高 7m の波が侵入した場合、岸側の平均水位が
研究官および同研究チームの皆様、さらに、平面
3.8m 上昇することを示している。
水槽での造波実験を実施して頂いた新潟港湾空港
技術調査事務所の松田茂所長をはじめとする調査
事務所の皆様、および(株)日本港湾コンサルタン
トの永松宏一部長に心から感謝の意を表します。
本研究は、JSPS 科研費 15K12497 の助成を受け
たものです。
参考文献
Fig.9 Fluctuation of mean water level on
(1) 吉田清三:富山湾の海難と寄り回り波,海難
horizontal floor
防止資料, pp.34-38,1987.3.
(2) 河合雅司・門村英城:寄り回り波・津波の予
4. おわりに
報に関する基礎研究,日本航海学会論文集,
富山湾にうねり性波浪が侵入すると沿岸部で数
第 125 号, pp.129-135,2011.9.
分周期の水位変動が生じることが沿岸部における
(3) 河合雅司・平山克也・北村康司・川口清司:
水位観測により分かっているが、この数分周期の
うねり性波浪に伴う富山湾沿岸の水位変動に
水位変動の発生メカニズムについては、一般に、
ついて, 日本航海学会論 文集 ,第 132 号,
うねり波群に拘束された長周期波成分が、砕波に
pp.28-35,2015.7.
よって解放されたものであると考えられている
(5)
(4) 堀川清司:海岸工学
が、かならずしも明確には分かっていない。そこ
-海洋工学へ序説-,
pp.113-129, 東京大学出版会, 1982.
で、本研究では、造波水槽を用いた実験により、
(5) M.J.Tucker: Surf Beats: Sea Waves of 1 to
水深を浅くした水平床に、規則波を入射させるこ
5 Min. Period, Proceedings of the Royal
とにより、水平床上で固有振動が生じることを確
Society of London. Series A, Mathematical
認した。また沖合に突き出た水平床に規則波を入
and Physical Sciences, Vol.202, No.1071,
射した場合は、水平床上で水平床の長さの 1/2 を
pp.565-573,1950.8
1波長とする平均水位の変動が観測された。この
平均水位の変動において、岸側の水位が最も高く
128
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
モデル予測制御による船舶制御に関する基礎研究
正会員 松田 真司(海上保安大学校)
要旨
高度な制御法であるモデル予測制御(Model Predictive Control)は石油化学産業、プロセス産業界における
適用例も増加している。モデル予測制御は特に 1 入力1出力(Single Input Single Output, SISO)問題に適し、
調整が容易、アクチュエータの制約を考慮できるので舵によって船首方位を制御する船舶オートパイロット
にも適していると思われる。
本研究では、モデル予測制御を用いた船舶のオートパイロトによる直進及び変針のシミュレーションの結
果を示す。また、船舶に適用する場合の問題点などが示される。
キーワード:航海計器・計測、モデル予測制御、船舶オートパイロット
1.はじめに
3.変針シミュレーション
針路を自動的に保持するオートパイロットは大
図1はモデル予測制御を用いて行った変針時の
洋を航海する船舶に装備され、航海をする上で必要
シミュレーション結果である。シミュレーションは
不可欠になっている。
TK モデル(T=15.0 s、K=0.15 1/s)を使用し、10°変
針を行った。オーバーシュートもなくきちんと当て
オートパイロット歴史は古くの発明は 20 世紀初
舵を取っていることがわかった。
頭で、当時のオートパイロットは多分に機械・機構
的であった。
一方、制御側も古典制御理論からオートパイロッ
トの調整に関連して、航海(操舵)による針路偏差な
どを基にした評価関数やそれを最小にするための最
適制御側を用いるようになった 1)。
本研究で用いるモデル予測制御は 1 入力1出力問
題に適し(多変数も可能)、調整が容易、アクチュエ
ータの制約を考慮できるなどの特徴を持っている。
この特徴を用いて舵による保針及び変針ができる船
図1
舶のオートパイロットを設計し、シミュレーション
10°変針シミュレーション
を行った。
4.まとめ
2.モデル予測制御
本稿ではモデル予測制御を用いた一例として、変
オートパイロットの基本機能は直進及び変針であ
針時のシミュレーション結果を示した。今後は船の
るが、本稿ではモデル予測制御を用いた変針につい
動特性を表すモデルが違う場合や積分舵について検
て述べる。
討する必要がある。
変針を行うために設定値軌道と参照軌道を用い
る。現時刻における船首方位角を (k ) とし、操船者
5.参考文献
が設定した軌道が設定値軌道(いわゆる設定針路)
である。参照軌道は現時刻の (k ) から出発し、船が
(1) 松田
真司:船舶用オートパイロット,日本計
測自動制御学会学会誌計測と制御,第 50 巻,
第 6 号,pp.367-373,2011.6.
設定値軌道に戻る際の理想的な軌道であり、船の閉
ループの重要な振る舞いを定義する。また、参照軌
(2) ヤン M マチェヨフスキー,モデル予測制御,
道は現時刻の船首方位角から設定値に指数関数的に
pp.1-8,東京電機大学出版局,2005.
近づくと仮定する 2)。
129
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
船舶による高精度単独測位の精度評価と応用提案
学生会員○齊藤
詠子(東京海洋大学)
正会員 久保 信明(東京海洋大学)
正会員 霜田 一将(航海訓練所)
要旨
海上ブイは海面変動計測が可能であり、東日本大震災では津波警報の更新に役立った。船舶が海上ブイの
機能の一部を持ち合わせることができれば計測点の増加につながり、より広範囲かつ高精度な海面変動の分
析が見込める。また、大規模災害発生時、錨泊中の船舶が海面変動を分析できれば、錨泊中の船舶に対する
防災・減災対策の実現が期待できる。本研究では、高精度測位において基準点を要さない PPP に着目し、陸
上定点と錨泊中の船舶(銀河丸、総トン数:6,185)での PPP の精度評価を比較検討した。実験結果より、錨
泊中の船舶では PPP により水平方向 0.2m 程度、高さ方向で 0.1m 程度の精度で位置決定が可能であり、海上
ブイと比較し広範囲の海域かつ多点で海面変動を計測できることが示唆され、海上ブイの代替またはデータ
補間と自船のみによる防災・減災対策へ向けた海面変動計測の可能性を得た。
キーワード:電波航法、GPS、PPP、精度評価、防災・減災、海上ブイ
1.はじめに
い PPP(高精度単独測位:Precise Point Positioning
海上ブイは、波浪や潮位などを計測できるため、
海面変動を計測する目的として日本沿岸に整備が進
以下、PPP)に着目し、陸上定点と錨泊中の船舶(航
海訓練所練習船銀河丸、総トン数:6,185)での PPP
(1)
められている 。東日本大震災では、海上ブイの計
の精度評価を比較検討することで、錨泊中の船舶に
(2)
測結果が津波警報の更新に役立ったという報告 も
よる海上ブイの代替またはデータ補間と防災・減災
あり、海面変動の計測は防災・減災や環境問題の観
につながる応用提案を行う。
点からも注目されている
(3)(4)
。しかし、海上に建設
2.海上ブイと船舶の比較
するため建設費用・期間、電源確保および保守整備
(5)
などに課題がある 。
海上ブイには GPS が搭載されており、基準点を利
海上ブイを建設する際は、事前に GPS(全地球測
位システム:Global Positioning System
用した高精度測位を基本として、海面変動や気象海
以下、
象を計測している。船舶も海上ブイと同様に GPS が
GPS)
の高精度測位に必要となる基準点からの信号の
搭載されているが、船舶における GPS は、運航者が
受信可否を調査してから建設することができるため、 安全運航を行う上で有益となる自船の位置情報を得
基準点を利用した高精度測位が可能である。一方、
る た め や 、 AIS ( 船 舶 自 動 識 別 装 置 : Automatic
船舶において、航行海域はそれぞれ異なり、一様で
Identification System)のように自船の位置情報を
はないため、基準点からの信号を受信できるとは限
要する航海計器と接続し、利用されている。
らない。しかし、船舶が海上ブイの機能の一部を持
海上ブイで計測できる代表的なデータは、波浪、
ち合わせることができれば分析データの増加が見込
潮位、津波、風向・風速、水温、流向・流速、気温
め、より高精度な海面変動の計測につながり、防災・
および気圧(7)である。また、海上ブイは計測データ
減災対策の実現が期待できる。また、津波発生時に
を陸上に伝送する手段(衛星通信)を備えており、
岸壁に係留された船舶の防災・減災対策についての
より詳細な測位データの分析を陸上で行うことがで
(6)
検討 は行われているものの、気象・海象、運航計
きる。一方、大型・小型問わず全ての船舶とすれば
画および岸壁事情などにより湾内で錨泊している船
計測できるデータの種類および陸上への伝送手段
舶に対する検討は少なく、基準点を必要としない測
(衛星通信)の有無で海上ブイの全ての機能を満た
位方法により、船舶自身で高精度な海面変動を計測
しているとはいえない。しかし、国際航海に従事す
することができるようになれば、錨泊中の船舶に対
る 300 総トン数以上の船舶(以下、大型船)では、
する防災・減災対策の実現にも期待できる。
GPS は搭載が義務付けられており、搭載率は 100%と
本研究では、高精度測位において基準点を要さな
いえる。また、小型船舶においても搭載義務はない
130
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ものの、搭載率は 98%(8)に達しており、GPS の航海計
表1
器としての利用は多い。これらのことから、多くの
受信機
船舶に搭載されている GPS の二次的利用の可能性は
アンテナ
高いといえる。
使用衛星
3.実験
使用
周波数
第 2 章に示したように、船舶での GPS 搭載率は高
いものの航行海域を特定できないため、高精度測位
に用いられる基準点を利用できるとは限らない。し
かし、現状の単独測位では精度が約 10m 程度であり、
海面変動のように数 cm 単位の計測を要する用途と
実験機材・条件
Trimble SPS855
陸上:NovAtel 703GGG
海上:Trimble Zephyr Zeodetic
GPS、GLONASS、QZSS、Beidou
L1 帯と L2 帯の 2 周波
測位時間
24 時間
測位間隔
1秒
測位モード
Kinematic
仰角マスク
10 度
補正情報
OmniSTAR
しては十分な精度を満たしていないといえる。一方、
基準局を利用せずに静止衛星から補正情報を得るこ
とができる方法としては OmniSTAR(9)の利用があげ
ンテナ: Trimble 社 Zephyr Geodetic)の基準点(F3
られる。OmniSTAR は全陸地の 90%以上で補正情報を
解 ) (10)(2014 年 12 月 14 日 計 算 ) を 使 用 し 、
得ることができ、単独測位の精度向上が見込めるサ
RTKLIB2.4.2p11 よ り 得 ら れ た RTK(Real
ービスの一つである。
Kinematic 以下、RTK)の FIX 解を使用した。なお、
Time
本研究では、高精度で海面変動の計測が必要とな
RTK で使用した衛星、周波数、測位時間、測位間隔
るような海上ブイの代替またはデータ補間および錨
および仰角マスクは表 1 に示した PPP の条件と同様
泊中の船舶による防災・減災を目的とした新たな応
とした。FIX 解の算出割合を FIX 率とすると、FIX 率
用提案の可否を判断するため、OmniSTAR を用いて、
は陸上では 100%、船上では 63.4%であった。船上は
陸上の定点と錨泊中の船舶での PPP の精度評価を比
陸上に比較し、FIX 率が低く、錨泊位置と基準点と
較する実験を行った。
の距離が RTK の基線解析に影響した結果、FIX 率の
減少につながったことが考えられる。PPP は解の収
3.1
陸上の定点測位実験
束に時間を要し、収束前の測位結果は不定となるこ
2015 年 6 月 21 日、東京海洋大学越中島キャンパ
ともあるため、測位開始後から 30 分間のデータを
ス第 4 実験棟屋上(35-39N・139-47E)を定点とし、
除き、標準偏差、
平均値および RMS
(Root Mean Square
表 1 に示す実験機材を利用し 24 時間の測位を行っ
以下、RMS)を算出することで PPP の測位精度とし
た。受信機は Trimble 社 SPS855、アンテナは陸上に
た。
おいては NovAtel 社 703GGG を使用した。
陸上の定点測位実験では、アンテナ高を超えるよ
うな構造物はアンテナ周辺になくオープンスカイと
3.2
錨泊中の船上測位実験
いえる。一方、錨泊中の船上測位実験では、アンテ
2015 年 7 月 4 日、東京湾(35-34N・139-54E)に錨
ナ設置に対する安全面を考慮し、船上特有の構造物
泊中の銀河丸において、表 1 の条件にて、24 時間船
である煙突やレーダーマストの上部に設置すること
上での測位を行った。使用アンテナ(Trimble 社
を避けたことから、アンテナ高を超える構造物の近
Zephyr Geodetic)が陸上と異なるが、銀河丸の運航
傍への存在と海面反射に起因するマルチパスの発生
計画や実習訓練の都合上、陸上定点での実験日以前
により、PPP の測位率が陸上の定点測位実験と比較
にアンテナを船上に設置しなければならなかったた
し低いと予測していた。しかし、PPP の測位率は両
めである。
実験ともに 100%を示した。これは、アンテナを船橋
上部のフライングデッキに設置することで、適度に
3.3
実験の結果と考察
海面からの距離を保てたこと、また、可能な限り構
PPP の精度評価は、陸上の定点実験および錨泊中
造物から距離を離した場所にアンテナを設置したこ
の船上実験の測位率と相対測位解との比較により行
とが、PPP の測位データを安定して受信できた一要
った。相対測位解は東京海洋大学越中島キャンパス
因ではないかと考える。本実験では、船上のアンテ
第 4 実験棟屋上設置(受信機: Trimble 社 NetR9、ア
ナ設置場所を可変しての実験は行わなかったものの、
131
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
1
100
0
0
-100
船首方位 最大246.8(度)振れ回り
-1
486661
図1
503941
521221
GPS時刻(秒)
緯度方向
高度方向
経度方向
船首方位
FIX解との差(m)
緯度方向
高度方向
船首方位(度)
FIX解との差(m)
1
0
-1
538501
135783
相対測位解との比較(船上)
図2
153063
170343
GPS時刻(秒)
表2
測位
場所
187623
相対測位解との比較(陸上)
安定した高精度測位には、アンテナ設置位置をでき
るだけ煙突やレーダーマストなどから離し、高位置
経度方向
測位精度
評価
項目
標準
偏差
緯度
方向(m)
経度
方向(m)
高度
方向(m)
0.013
0.011
0.033
平均値
0.195
-0.180
0.102
と船上の両実験で得られたデータと FIX 解(船上で
RMS
0.196
0.181
0.107
は、船首方位の変位を含め)を比較する分析を行っ
標準
偏差
0.023
0.019
0.070
平均値
0.199
-0.176
0.102
RMS
0.200
0.177
0.124
に設置するなど、船上の構造物の影響を受けにくい
場所や海面反射の影響を受けにくい場所にアンテナ
を設置するなどの考慮は必要といえる。
陸上
次に、船上における PPP の精度評価として、陸上
た。船舶は、錨を海底に入れ動きを止めた錨泊中で
船上
あっても、気象海象の影響を受け海面を振れ回るた
め、
船首方位次第で OmniSTAR からの補正データが受
信できなくなり、測位精度が陸上に比較し、悪くな
るのではないかと予測していた。錨泊中の実験では、
振れ回りと因果関係があるのではないかと推察する。
船首方位は最大で 246.8 度の範囲で変位(図 1)す
表 2 より、両実験とも RMS 誤差が全体で 0.1~0.2m
ることが確認できたものの、前述のように陸上の実
程度発生し、系統誤差が生じていることが分かる。
験と同じく PPP の測位率は 100%であり、船首方位が
この原因は分析中であるが、相対測位解と PPP の解
大きく変位しても高精度測位に必要となる補正デー
算出方法の差異が影響していると考えられる。
タは受信できたといえる。しかし、実験開始時から
船上の水平方向の測位精度は平均値で 0.2m 以下
486,661 秒(GPS 時刻)までの間、船首方位が 50 度程
であり、計測地点となる船舶の錨泊位置を特定する
度の範囲で変位を繰り返しており、その間 FIX 解が
のには十分な精度といえる。測位結果のばらつきや
得られないことが確認できた。一方、538,501 秒付
系統誤差の発生原因を特定できれば、さらに高精度
近のように、安定して FIX 解が得られる間は、陸上
な測位を実現できると考える。
(図 2)と船上で測位結果は同じ傾向を示しており、
概ね 0.2m 程度で推移していることが分かる。図 1 よ
4.海上への応用提案
り FIX 解が得られない直後でも概ね 0.2m 程度の測
4.1
海上ブイの代替・データ補間
位結果がでていること、補正データの受信の欠落は
第 2 章に示したように、海上ブイが計測している
確認できなかったことから、錨泊中の船舶の動きに
項目は海面変動(高度方向)のみではないので、船
よらず、PPP による高精度測位を実現できるのでは
舶で他の項目を計測できることが必要である。銀河
ないかと推察する。
丸のような大型船は気象観測装置が搭載されており、
表 2 に、陸上および船上での測位精度を示す。標
海上ブイの計測している項目と同様な項目は、既存
準偏差より、船上は陸上に比較し、ばらつきが大き
の気象観測装置で計測可能であるといえる。また、
いことが分かる。これは、前述のように、船上の構
海上ブイは、計測された海面変動データを陸上へ送
造物や海面反射によるマルチパスの発生も要因の一
信するため、衛星通信を搭載しているが、銀河丸の
つと考えられるものの、水平・高度方向ともに、船
ような大型船は衛星通信設備が搭載されており、陸
首方位の振れ回りが大きく変位(図 1)すると、FIX
上へのデータ伝送は既存の設備で対応可能であると
解との差に開きが確認できたことから、船首方位の
いえる。
船舶は航行海域を特定できないことにより、
132
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
基準点からの信号を得られない場合が考えられるが、 促すシステムを提案できた。湾内には多数の船舶が
前述のような銀河丸と同様な装置を搭載した船舶で
錨泊しており、外部からの情報に頼らない自船で完
あれば、基準点を要せずとも船上測位で高度方向
結できる防災・減災対策システムは船舶および船員
0.1m 程度の精度が得られたことから、船舶での PPP
という貴重な財産を守るためにも必要と考える。
は、海上ブイの代替あるいはデータ補間が期待でき
謝辞
ると考える。
本研究にあたり、練習船への実験機材設置にご協
4.2
錨泊中の船舶による防災・減災対策
力頂いた東京海洋大学情報通信工学研究室の皆様、
湾内には日本籍船に限らず、多数の船舶が錨泊し
実験データの取得にご協力頂いた航海訓練所練習船
ている。本節では、船上での PPP から得られる高精
の皆様に感謝致します。
度な情報を利用し、船舶内でデータ分析を行うこと
により、船員へ異常を通知するシステムの概要につ
参考文献
いて述べる。PPP より得られた海面変動データを計
(1) 中田健嗣・西新三郎:ブイ式海底津波計の紹介,
測装置から船内設置のパソコンへ常時出力し、分析
気象庁測候時報, 第 81 巻,特別号, p.101,
する。分析の結果、海面の異常変位を検知した際は、
2014.
データ取得を継続しつつ、検知された異常変位デー
(2) 日立造船株式会社:新型 GPS 海洋ブイの実証試
タを船内全体で共有するため、異常の検知を当直航
験 を 開 始 , http://www.hitachizosen.co.jp/
海士に通報し、通報を受けた当直航海士は船内指令
release/2014/11/001453.html, 2015.7.
(3) 小林孝:GPS 波浪計による沖合波浪の観測,建
装置から大きな音で乗組員が理解できる言語、ある
いはブザー音で警報や注意を促す通知を行う。一方、
設の施工企画, 715, p.16, 2009.9.25.
(4) 林豊:GPS 波浪計の長周期波形観測値による沿
海面の異常変位が検知されない場合はデータ取得を
岸津波換算値を活用した津波即時情報,自然災
継続し、異常変位時に備える。
害科学, 29,3, p.381, 2010.
5.おわりに
(5) 防災分野での GPS 海洋ブイの取組み:海洋情報
本研究では、陸上の定点測位実験と錨泊中の船上
フォーラム, http://www.mlit.go.jp/common/
測位実験から PPP の精度評価を行った。錨泊中の船
001037641.pdf, p.15, 2014.3.27.
上測位実験から、水平方向 0.2m 程度、高さ方向 0.1m
(6) 増田光弘・南清和・増田光一:MPS 法による津
程度の精度で船上でも測位が可能であることがわか
波シミュレーションと係留船舶の津波中挙動
った。これにより、海上ブイの機能の一部である高
解 析 , 日 本 航 海 学 会 論 文 集 , 127, p.41,
度方向の海面変動は、船舶を観測点とした場合、海
2012.9.25.
上ブイの代替やデータ補間として利用可能であるこ
(7) 日立造船株式会社:GPS 海洋観測システム,
とが示唆されたといえよう。船舶は機動性が高く、
http://www.hitachizosen.co.jp/products/pr
固定された定点だけの観測にとどまらない。すなわ
oducts029.html, 2015.7.
ち、基準点を要さない PPP を利用することは広範囲
(8) 社団法人日本航空宇宙工業会:平成 22 年度宇
の海域での計測を可能とし、より詳細な海面変動の
宙産業実態調査, ユーザー産業群規模及び日
分析が期待できる。一方、船上測位では陸上での定
米欧宇宙産業比較調査報告書, p.7, 2011.3.
点測位に比較し、大きなばらつきや系統誤差が確認
(9) M.E. Cannon・S.Skeone・Y.Gao・Y.Moon・K.Chen・
された。これらの原因は本研究では明らかにするこ
S.Crawford ・ G.Lachapelle : Performance
とはできなかったが、ばらつきを補正する手法と系
Evaluation
of
統誤差軽減の検討は、今後の船上測位における、さ
Services,
Proceedings
らなる精度向上へ向けた課題といえよう。
International Technical Meeting of the
実験結果より、船舶自身での精密な海面変動デー
Several
Wide-Area
of
the
GPS
15th
Satellite Division of The Institute of
タの取得について見通しが得られたことから、高度
Navigation, p.3,2002.9.
方向の変動を錨泊中の船舶自身で分析することで、
(10) 国土地理院:電子基準点データ提供サービス,
防災・減災対策の一つとして運航者に警報や注意を
http://terras.gsi.go.jp/, 2014.12.
133
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
衛星搭載型合成開口レーダを用いた海上交通モニタリング
-陸域観測技術衛星だいち 2 号の観測性能正会員
○渡川 真規(株式会社パスコ) 非会員
三五 大輔(株式会社パスコ)
要旨
世界で 400 件以上も発生していた海賊事件は 2012 から減少に転じた。その一方では、東南アジア海域の海
賊事件は 2009 年から年々増加傾向にあり、2014 年は 141 件という過去最悪の件数を示している。本研究で
は、2014 年 5 月 24 日に打ち上げられた陸域観測技術衛星だいち 2 号に搭載された合成開口レーダから取得
される観測データを海上交通の把握という観点から評価する。
キーワード:リモートセンシング、ALOS-2、陸域観測技術衛星だいち 2 号
1.はじめに
している(2)。
IMB(国際海事局)の報告(1) によると、世界で 400
表 1 に ALOS-2 の主要緒元、表 2 は PALSAR-2 の観
件以上も発生していた海賊事件は 2012 から減少に
測モード毎の分解能、観測幅を示す。
転じた。これは、ソマリア沖とアデン湾で展開され
た海賊対処活動や商船独自の防御対策による効果と
表1
ALOS-2 主要諸元
設計寿命
5 年(目標 7 年)
打上日
2014 年 5 月 24 日
打ち上げロケット
H-ⅡA24 号機
射場
種子島宇宙センター
軌道(高度)
628km(軌道上)
周回時間
約 100 分
回帰日数
14 日
2,100kg 以下
衛星質量
(推薬含む)
衛星サイズ
約 10.0m×16.5m
(軌道上)
×3.7m
ミッションデータ
直送伝送及びデータ
伝送
中継衛星経由
PALSAR-2(周波数)
L バンド(1.2GHz 帯)
考えられる。一方、東南アジア海域の海賊事件は
2009 年から年々増加傾向にあり、2014 年は 141 件
という過去最悪の件数を示している。日本商船が多
く通航する東南アジアの海賊事件増加は、エネルギ
ー資源の大半を海上輸入に依存している我が国にと
っても脅威となる。本研究は、地表を広範囲かつ詳
細に観測できる地球観測衛星を用い、マラッカ・シ
ンガポール海峡を対象とした海上交通のモニタリン
グ手法を議論するものである。本稿では、2014 年 5
月 24 日に打ち上げられた陸域観測技術衛星だいち 2
号から取得された観測データを試験的に評価する。
2. 陸域観測技術衛星だいち 2 号
表2
域観測技術衛星だいち 2 号(ALOS-2: Advanced
PALSAR-2 の観測性能
観測モード
Land Observing Satellite 2)は 2006 年から 2011
年まで運用された陸域観測技術衛星だいち(ALOS)の
後継機となる。初号機 ALOS のミッション
(地図作成、
スポットライト
地域観測、災害状況把握など)を発展的に引き継い
Ultra-Fine
でいる。ALOS が 3 種類のセンサ(AVNIR-2、PRISM、
PALSAR)を搭載していたのに対し、ALOS-2 は全天
候・昼夜問わずに観測できる合成開口レーダ(SAR:
Synthetic Aperture Radar)に特化している。
高分
解能
High-sensitive
6m
50km
Fine
10m
100m
60m
70km
350km
490km
広域観測
ALOS-2 に搭載されたフェーズドアレイ方式 L バン
分解能
観測幅
1m(Az) 25km(Az)
×
×
3m(Rg) 25km(Rg)
3m
50km
Az:衛星進行方向(アジマス方向)の分解能
ド合成開口レーダ(PALSAR-2:The Phased Array type
Rg:電波照射方向(レンジ方向)の分解能
L-band Synthetic Aperture Radar)の能力は、PALSAR
と比較して、その分解能・観測可能域は大幅に向上
134
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
3. ALOS-2 の観測性能
図 2 は 2014 年 10 月 26 日の深夜にマレー半島を
広域な海域を定期的に観測できる地球観測衛星
含むエリアを ALOS-2 で観測した衛星画像を縮尺
は、より経済的な海上交通モニタリングに資すると
1/1,500,000 で表示している。マラッカ・シンガポ
考えられる。本章では、ALOS-2 が保有する広域観測
ール海峡(東西約 200km)を包含した、広い海域を
モードで取得された観測成果を紹介する。
一度に観測していることがわかる。図 3 は同じ衛星
画像を疑似カラー合成(Red: HH, Green: HV, Blue:
3.1
マラッカ・シンガポール海峡の特徴
HH/HV)して、縮尺 1/1,500,000 で示している。
マラッカ・シンガポール海峡の航行量は 2012 年
に 12 万隻以上に達し、海上交通の要所であると同時
に海峡が狭いという地理的特徴が挙げられる。さら
に、
海賊事件が頻発する海域でもある(3)。図 1 は 2011
年の海賊行為の発生箇所を GIS(地理情報システム)
上に重畳させたハザードマップである。発生密度が
高い地域ほど濃く(レッドゾーンで)表示されてお
り、マラッカ海峡からシンガポール海峡に差し掛か
る広い海域で事故が頻発していることが分かる。
Straits of Singapore
Malaysia
図2
マラッカ・シンガポール海峡周辺の観測結果
Borneo
Sumatra
(a)
図1
東南アジア海域の海賊事件の地理的分布
(2011 年)
3.2
広域観測モードの捕捉範囲
先行研究(4)においては、大阪湾を航行する船舶を
衛星画像から抽出できることを確認した。先行研究
で用いた光学センサは空間分解能が高く、目視で船
図3
影を容易に認識できる。しかし、天候の影響を受け
マラッカ・シンガポール海峡周辺の観測結果
易く、基本的に夜間は観測できない欠点がある。合
観測日:2014 年 10 月 26 日 1 時 21 分
成開口レーダは,
マイクロ波を地上に向けて照射し、
観測モード: 広域観測(490km)
対象物からの反射(後方散乱)を受信・記録する能
偏波: HH+HV
動型センサである。雲を透過して定期的に海域を観
©JAXA Distributed by ALOS-2 Operation and Data
測することが可能であるため、夜間の観測にも威力
Distribution Consortium.
を発揮する。
135
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
(a)
3.3
SAR 画像の特徴
PALSAR-2 は広域を 2 偏波(HH と HV)で取得でき
SAR はマイクロ波を地表に向けて照射し、地表の
る。HH には R、HV には G、2 偏波(HV/HH 比率)か
対象物からの反射(後方散乱)を受信・記録する能
ら B を割り当てることで、疑似カラー画像を作成す
動型のセンサである。後方散乱の強さは、地表面の
ることができる。この疑似カラー画像では森林域は
土地被覆状況や地表形状・地形により異なり、SAR
緑色、河川・海域などの水部は青色、都市域などの
画像上では後方散乱が弱いほど暗く(黒く)、後方散
構造物はピンク色で表現されることになる。図 4 の
乱が強いほど明るく(白く)表現される。したがっ
疑似カラー画像では、海域に存在する船舶はピンク
て海域における SAR 画像では、平滑な水面はマイク
色もしくは黄色で表示される。
ロ波の反射強度が弱くなるため暗く写り、船舶等の
4. まとめ
人工構造物は明るく映る特徴がある。
図 4 は 図 3 の 白 枠 線 (a) で 示 す 範 囲 を 縮 尺
陸域観測技術衛星だいち 2 号に搭載された合成開
1/500,000 で拡大している。シンガポール空港の東
口レーダ:PALSAR-2 が観測したマラッカ・シンガポ
南に位置するが、航路上に白く映る無数の船舶を認
ール海峡の概観図を試作し、評価した。夜間におい
識できる。
ても広い海域を観測し、船舶位置を把握できる性能
は、海上交通モニタリングにおいて、優れた情報収
集の手段となる。今後も提案手法の高度化を目指し
検証を継続する。
(a)
謝辞
本研究は独立行政法人宇宙航空研究開発機構の
陸域観測技術衛星 2 号(ALOS-2)における研究公募
(RA-2)の枠組みで提供された衛星データを使用して
いる。関係各位に深謝する。
参考文献
(1) ICC IMB: PIRACY AND ARMED ROBBERY AGAINST
SHIPS, 2014 Annual Report, pp.5-18, 2015.1.
(2) PASCO,ALOS-2 について,
(a)
http://jp.alos-pasco.com/alos-2/, 2015.8.
(3) 渡川真規・古莊雅生・若林伸和・小林英一:地
理情報システムを用いた海賊事件分析,日本航
海学会論文集,No.128,pp.55-63,2013.3.
(4) 渡川真規・香西克俊・古莊雅生・嶋田博行:ALOS
を用いた沿岸環境モニタリング手法の検討,日
本航海学会論文集, No.125, pp.83-89, 2011.9.
図4
マラッカ・シンガポール海峡の観測結果
観測日:2014 年 10 月 26 日 1 時 21 分
観測モード: 広域観測(490km)
偏波: HH+HV (Red: HH, Green: HV, Blue: HH/HV)
©JAXA Distributed by ALOS-2 Operation and Data
Distribution Consortium.
136
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
魚群探知機エコーと GPS 測位によるメタンプルーム位置特定
○正会員 千葉 元(富山高等専門学校商船学科)
非会員 竹内 章(富山大学理工学研究部)
非会員 畠 俊郎(富山県立大学工学部環境工学科) 正会員 八木光晴(長崎大学水産学部)
Abstract
魚群探知機で観測されたメタンハイドレードプルームのエコーから、海底の湧出位置の特定を行った。ま
ず 2013 年 8 月の上越沖の JAMSTEC「なつしま」の観測航海で、このメタンハイドレードのプルームのエコ
ーを観測することができ、このデータを分析することにより、プルーム位置の特定を行った。そして、2014
年 5 月、2015 年 5 月の長崎大学「長崎丸」の観測航海にて、この特定した位置に同じプルームエコーの確認
を行った。2015 年の観測航海では、この位置で海底からのメタンハイドレードの試料採取にも成功した。
キーワード:航海計器・測位、計量魚群探知機、海洋観測、GPS 測位、メタンハイドレードプルーム、
1.はじめに
タル化して保存され、後で信号処理をすることによ
近年、メタンハイドレードが次世代のエネルギー
り、目的とするエコーの詳細な識別を行うことがで
源として注目されている。特に、日本海東縁の上越
きる。また、船内の精密時計や GPS 等の航行データ
海盆では海底下の比較的浅い部分にメタンハイドレ
も連動しているため、観測時の詳細な緯度・経度、
ードが存在することが、魚群探知機によるプルーム
方位・船速を得ることも可能である。本研究では、
観測や深海観測機器による試料採取より確認されて
まず 2013 年 8 月の上越沖の観測航海で、このメタン
いる。深海底に存在するメタンハイドレードは、海
ハイドレードのプルームのエコーを観測することが
底面の亀裂等から海中に湧出することがあるが、こ
でき、このデータを分析することにより、プルーム
れは深海の低水温と高気圧により、メタンハイドレ
位置の特定を行った。そして、2014 年 5 月、2015
ードで覆われた気泡となって上昇していく。
そして、
年 5 月の観測航海にて、この特定した位置に同じプ
水深約 300m 程度になると、海水温度の上昇と水圧
ルームエコーの確認を行った。そして、2015 年の観
の低下によりハイドレードはメタンの気相となり、
測航海においては、この位置で海底からのメタンハ
最終的には海水中に溶解していく
(1),(2)
。
イドレードの試料採取にも成功した。
このメタンハイドレード湧出点位置の特定は、メ
2.2013 年 8 月「なつしま」による観測
タンハイドレードの海底下への存在と、その量を推
測する重要な指針となるものである。このメタンハ
2013 年 8 月 2 日~7 日に(独)海洋研究開発機構
イドレードが海底から海面に向かって行く状況を、
の「なつしま」
(1,739GT)による観測航海(観測航
メタンハイドレードプルームと呼んでいて、これは
海名 NT13-17:課題名「富山トラフの活構造マッピ
海水と音響インピーダンスが大きく違うために、超
ングと地震津波シミュレーション」)が行われた。こ
音波を利用した魚群探知機には明確なエコーとして
ここで、上越海盆では船が航走しながら、「なつし
確認できるものである。これにより、船上の魚群探
ま」搭載の計量魚群探知機(SIMRAD EK60,周波数
知機から、こうしたプルームのエコーを観測するこ
38kHz・120kHz)による探査を行った。ここで、ま
とにより、船からプルームの相対位置が知れ、これ
ず 8 月 3 日の夕刻に、図 1 上に示す、メタンハイド
と船の GPS 測位位置を照合することにより、プルー
レードプルームと思われるエコーを水深約 550m に
ムの絶対位置(緯度・経度・水深)を特定すること
確認した、翌朝にほぼ同じ場所を船が航走した所、
が可能である。しかし、魚群探知機で使用している
図 1 下に示すように、ほぼ同じ位置と水深に同様の
超音波では、観測ビーム幅が存在し、これは数 100m
エコーが確認された。
海底下では数 10m 幅の観測エリアとなってしまう。
現在、漁業や海洋資源調査の観測船で良く用いら
ここで、計量科学魚群探知機で記録されていた、
エコー変化にともなう、GPS 測位による緯度・経度、
れている、計量魚群探知機では、取得データがデジ
針路から、
図 2 に示すプルーム位置の特定を行った。
137
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
周波数 38kHz:8/3 の夕刻
周波数 38kHz:8/4 の早朝
図1
「なつしま」搭載計量魚群探知機によるプルームエコー(縦軸は水深(m),横軸は時間約 30 分)
+0.10'
+0.08'
エコーが見え始めた位置
8/3 夕刻の母船の航跡
エコーの中心位置
8/4 早朝の母船の航跡
エコーが消えた位置
上記データより推
+0.06'
測されるプルーム位置
+0.04'
図2
図 1 の 2 データ
より、平面で示したエ
コー観測位置(絶対位
+0.02'
50m
置からの偏差で示し
て い る 。)・ 母 船 の 航
0.0'
′
0.0`
+0.05'
+0.10'
+0.15'
Difference of Longitude
138
+0.20'
跡、及び推測されるメ
タンハイドレードプ
ルームの位置の推測
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
周波数 38kHz:5/17 の正午頃
B
A ○
○
C
○
D
○
E
○
F
○
図 3 「長崎丸」搭載魚群探知機によるプルームエコー(縦軸は水深(m),横軸は時間約 48 分,海底からの
泥等のサンプル採取のためにドッレジやピストンコアラー等の作業を行っている,航跡は図 4 に示す。)
図 2 の縦軸・横軸は、GPS で測位された絶対緯度・
経度を基準として、それぞれの偏差で示している。
+0.4'
黒・緑破線の矢印が、それぞれ 8/3 の夕刻、8/4 の
早朝の母船の航跡を示している。ここで、魚群探知
機で取得されていたデータより、プルームエコーの
見え始めと、見え終リの位置を、それぞれ赤、青丸
印で示す。また、プルームの水平的位置が一番近い
C
D
と思える、この中心位置を三角印で示す。ここで、
+0.2'
エコーを捉えられている半径は約 70m となる。これ
は、ビーム幅 7°から計算される約 35m より大きい
F
ものであるが、プルームと海水の音響インピーダン
スの差が大きいために、
検知ができたものと思える。
また、水深約 100~200m のエコーにおいては、西か
A
0.0'
′
ら東への流れが伺えるが、これはこの場所の流れが
B
E
100m
対馬暖流の影響を受けているためと思える。ここで
は、ビーム幅も約 10~20m に狭まっているので、か
0.0`
+0.2'
Difference of Longitude
なり直下近くに観測できていると思える。これより、
プルーム位置は図2中の 2 重丸の位置で特定できる。
139
図4
+0.4'
図 3 の観測における GPS 航跡(赤線)
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
3.2014 年 5 月「長崎丸」による観測
で行われ、
メタンハイドレード試料収集に成功した。
2014 年 5 月 16 日~17 日に、長崎大学水産学部の
5.おわりに
「長崎丸」
(1,174GT)による第 391 次航海乗船実習
の一部として、富山湾から上越沖の海洋観測が実施
計量魚群探知機によるエコー、これと連動した
された。この観測航海の目的は、「黒部川からの排砂
GPS による測位、CTD や ADCP による海洋物理及び
が富山湾に与える影響や、新エネルギー源として期
化学特性データを照合して、深海底から浅海域にお
待されているメタンハイドレードの賦存量を目的と
けるメタンハイドレードの挙動を分析していく。こ
した環境調査」であった。
「長崎丸」には、計量魚群
れにより、船上からの魚群探知機を用いた、メタン
探知機 KAIJYO KFC3000N が搭載されているので、
ハイドレード等の資源探査手法の一指針を確立させ
前章で特定したポイントでの観測を試みた。結果と
て行きたいと考える。
観測航海においては、「なつしま」,「長崎丸」の
して、「なつしま」
で観測したものと同様のプルーム
エコーを捉えることができた。
乗組員の皆様には、時には風波が強い条件下での観
測機器の投入及び回収、昼夜続いてのサーベイ等、
4.2015 年 5 月「長崎丸」による観測
船上観測の実施において多大なご協力を頂きました。
2015 年 5 月 15 日~17 日には、「長崎丸」による
ここに深く謝意を表させて頂きます。
第 413 次航海乗船実習の一部として、前年度と同目
参考文献
的で、ほぼ同海域における海洋観測が実施された。
ここで、3 章で確認されたプルーム観測点付近に
(1) 青山千春・松本良:
「計量魚群探知機によるメタ
おいて、約 50 分の海底のドレッジやコアサンプリン
ンプルームの観測とメタン運搬料の見積もり」,地学
グを行いながらの計量魚群探知機による観測を行っ
雑誌 118(1)C,pp.156-174,2009.
た。図 3 に魚群探知機の表示画面のコピーを、図 4
(2) 河原翔・高木洋平・伴貴彦・岡野泰則・加藤直
にこの間における GPS 航跡を示す。図 3 に示すよう
三:「深海から湧出するメタンガス/ハイドレード
に、この観測中に複数のプルームエコーが観測され
の 挙 動 予 測 」 , 第 24 回 海 洋 工 学 シ ン ポ ジ ウ ム
た。図 3 に示した、A~F の観測時における平面位
OES24-050 日本海洋工学会・日本船舶海洋工学会,
置を、図 4 に示す航跡中にも示す。ここで、C,D
2014.3.
点付近が、ほぼ図 2 中の 2 重丸で示した、プルーム
(3) 千葉元・濱田健史・道田豊・橋本心太郎:「船
の推測位置と合致する。
また、図 3 より、
水深約 200m
舶搭載型CTD・ADCPによる富山湾の海洋環境調査
においては、一様に白いエコーが写っているが、こ
ADCP観測による富山トラフ周囲の海潮流調査」,
れは対馬暖流水層と、その下部の日本海固有水層の
日本航海学会論文集第132号,pp.86-96,2015.7.
境界における、温度躍層に起因すると思える。ここ
で、プルームのエコーが弱くなるため、ここでメタ
ンハイドレードの気相化が起こっていると思える。
一方、水深が約 100~300m 深においては、エコーが
横に流れている傾向が見えるが、これは図 1 で示し
た場合と同様に、その場所の海潮流の影響を受けて
いるものと思える。これについては、
「長崎丸」で同
時 期 に 観 測 し た ADCP(Acoustic Doppler Current
Profiler)や CTD(Conductivity, Temperature and Depth
profiler)データ、また、筆者らがこれまでに長期間観
測してきた、富山湾及び周辺海域の水塊構造や流れ
の特性(3)を基にして検討していきたい。そして、図
3,4 を見る限り、プルームが単体で無く複数存在し
ていることも考えられるが、これは GPS 測位データ
の詳細と、前記の流れの構造を照合させて検討して
いきたい。尚、コアサンプリングが、ほぼ C の位置
140
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
漂流ブイを用いた日本周辺海域における
波高と表層流速の関係
正会員
○嶋田
陽一(水産大学校)
要旨
日本周辺海域において漂流型海洋気象ブイロボットによる観測から表層流速とみなしたブイ速度と波浪の
関係を調べた。ブイ速度が速くなるにつれて、ブイ速度に対する低い波高群は線形に増加傾向を示し、高い
波高群はばらつきがあるが、概ね 0.7m/s を境にして減少傾向を示す。ブイ速度が速くなるにつれて波高の分
布は 2m 程度で収束する傾向を示す。気圧の急激な低下、波高及びブイ速度の増加の関係は明確にみられる。
その一方、気圧の急激な低下がない期間中の波高及びブイ速度の増加もみられ、その期間において波向とブ
イ移動の方向が反対であることが示唆される。
キーワード:航海・地球環境、漂流ブイ、表層流、波浪、海面気圧
1.緒言
接観測は行われていない。
船体運動は波浪の影響を大きく受けるので、波高
これまで気象庁では、外洋における波浪観測を効
予報の高精度化は航海のために重要である。鹿児島
率的に行うために、漂流型海洋気象ブイロボット(以
県トカラ列島の定期航路の船長より、同海域付近に
下、漂流ブイ)を日本周辺海域で投入し、その観測デ
おける気象庁の波高予報が低いという指摘があり、
ータを公開している(気象庁(6))。漂流ブイの位置・時
また、漁業関係者から、同海域における波高は周辺
間情報から表層流速を概ね推定することができる。
海域よりも 1.5 倍程度高いということが経験的に知
そこで、本研究では、漂流型海洋気象ブイロボット
(1)
られている(久保・高野 )。北太平洋における船舶が
を用いて、日本周辺海域における波高と表層流速の
安全かつ効率的に航行するために、黒潮のような流
関係を調べる。
域における波浪状態を把握することは重要である。
2.実験概要
近年、運航会社は大型石油タンカー13 隻で得た 23
航海分のデータより、黒潮を利用して航行すると従
本研究の漂流ブイは、直径 46cm(円板径 64cm, 高
来の海流推測図に基づく航海よりも、黒潮流域にお
さ 54cm)の球形で、重量約 30kg である(図 1)。観測
ける燃料消費量および CO2 排出量を最大 9%削減で
項目は位置・時間情報、気圧、水温、有義波高(以下、
(2)
きることが示され(日本郵船 )、海流を有効利用した
波高)及び有義波周期から成る。通常 3 時間毎に観測
船舶航行は注目されている。
を行っているが、台風接近時等により波が高い場合
海洋物理学の分野では、これまで風で駆動された
は、1 時間毎の観測を行う場合がある。本研究では 3
波浪の研究は盛んに行われていた。一方、波浪に対
時間毎の観測データを抽出し、位置情報から速度を
する海流の影響については理論的な研究はいくつか
計算する。漂流ブイの形状から風圧流の影響が小さ
(3)
あり、代表例として Unna は、流れがある場合の波
くなるように設計されているので、漂流ブイ速度を
の振幅変化について理論的に示し、波向と反対方向
表層流速とみなした。気象庁が用いる漂流ブイは 4
の流れがある場合、流れがない場合よりも波の振幅
数種類あるが、本研究ではドローグ(抵抗体)無しの
が数倍高くなることを導出した。近年、飛躍的に進
漂流ブイのデータを用いた。漂流ブイの観測期間は
化した波浪モデルと高性能な計算機によって、黒潮
2000 年から 2014 年(UTC)まで、漂流ブイ数は 203
が波浪に影響を与える可能性が指摘された(例えば、
個、漂流ブイの分布海域は日本周辺海域である。
(4)
田村他 )。また、高性能な地球観測衛星によって、
3.結果
軌道上の波浪・海上風と海流(定常流仮定)との関係
(5)
を調べることができるようになった(Hwang )。し
図 2 に全期間の漂流ブイデータからブイ速度と波
かし、これまで黒潮のような流域における波浪の直
高の散布図を示す。ブイ速度が速くなるにつれて、
141
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ブイ速度に対する低い波高群は線形に増加傾向を示
の 期 間 ) 、 波 高 は 約 2.5m( 極 大 期 間 ) 、 気 圧 は 約
し、高い波高群はばらつきがあるが概ね 0.7m/s を境
1010hPa(極小期間)であり(詳細図は示さない)、天気
にして減少傾向を示す。ブイ速度が速くなるにつれ
図(図 9)及び潮岬の風向(気象庁より。図示せず)より
てブイ速度に対する波高の分布は 2m 程度で収束す
西向き(東寄り)の風の傾向のために、波向と表層流
る傾向を示す。
の向きが反対になったことにより波高が高くなった
可能性がある。講演時には詳細について報告する。
図1 漂流ブイ(気象庁(6))
図 3 ブイ 2007_06 における軌跡(気象庁(6))
(図の説明は本文に示す)
図 2 ブイ速度と波高の散布図
ブイ速度と波高の関係性が高い漂流ブイデータ
の中でブイ 2007_06 の軌跡を図 3 に示す(丸印は 1 日
毎のブイの位置を示し、黄色丸、青色丸及び赤色丸
は毎月 1 日、観測開始及び観測終了の位置をそれぞ
れ示す)。
2007 年 4 月 27 日に投入されたブイ 2007_06
図 4 ブイ 2007_06 におけるブイ速度と波高の散布図
は、四国南方の黒潮再循環領域において時計回りに
循環し、8 月 1 日頃から黒潮に取り込まれて東方へ
移動する。ブイ速度と波高の散布図(図 4)より、ブイ
速度が 0.75m/s から 2m/s まで速くなると波高が 4m
から 10m まで高くなり、その一方、ブイ速度が
1.25m/s から 2.25m/s まで速くなると、波高が 1m か
ら 3m まで高くなる傾向を示す。図 5、図 6 及び図 7
にブイ 2007_06 におけるブイ速度、波高及び気圧の
時系列を示す。8 月 1 日のブイ速度は約 2m/s、波高
は約 13m と急激に増加し、気圧は約 970hPa へ急激
に減少する。
これらの時系列と 2007 年 8 月 1 日の天
気図(図 8)より、このブイの動向は台風によりブイが
黒潮に取り込められたと推察される。一方、2007 年
図 5 ブイ 2007_06 におけるブイ速度
8 月 13 日 0 時では移動速度は約 2m/s(速くなる傾向
142
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
図 9 天気図
(2007 年 8 月 13 日 0 時 UTC, 気象庁(7))
図 6 ブイ 2007_06 における波高
謝辞
本研究における漂流ブイデータ及び天気図に関して
気象庁に感謝の意を深く表する。
参考文献
(1) 久保剛太・高野洋雄: 波浪に対する海流の影響
調査, 測候時報, No.77, pp.S141-S157, 2010.
(2) 日本郵船ニュースリリース: 海流予測情報の効
果検証を実施 黒潮流域で最大 9%の燃料消費
量 ・ CO2
排 出 量 削 減 を 確 認 ,
http://www.nyk.com/news/2008/0313_01.htm,
図 7 ブイ 2007_06 における気圧
2008.
(3) Unna, P. J. H: SEA WAVES: THE WATER
MOVEMENT,
Nature,
Vol.150,
No.3811,
pp.581-582, 1942.
(4) 田村仁・早稲田卓爾・宮澤泰正・小松幸生: JCOPE
の 応 用 と 展 開 , 月 刊 海 洋 , Vol.38, No.7,
pp.475-479, 2006.
(5) Hwang, Paul A.: Altimeter Measurements of Wind
and Wave Modulation by the Kuroshio in the Yellow
and East China Seas, Journal of Oceanography, Vol.
61, pp. 987-993, 2005.
(6) 気 象 庁 : 漂 流 型 海 洋 気 象 ブ イ ロ ボ ッ ト ,
図 8 天気図
http://www.data.jma.go.jp/kaiyou/db/buoy/buoy-inf
(7)
(2007 年 8 月 1 日 0 時 UTC, 気象庁 )
o.html
(7) 気象庁:日々の天気図,
http://www.data.jma.go.jp/fcd/yoho/hibiten/
143
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
航海視環境下でのビジビリティレベル
-距離による輝度変化の影響-
○学生会員
学生会員
石丸 義樹(神戸大学) 正会員 河本 健一郎(川崎医療福祉大学)
福田 凌 (神戸大学) 正会員 古莊 雅生 (神戸大学)
要旨
輝度は物標を視認するうえで重要な役割を担っている。輝度変化は太陽高度により変化するが、物標との
距離も輝度の変化に関係する。背景輝度と対象船舶の輝度差が小さければ、目視によりその船舶を見張るの
は困難であり、船舶の見張りが遅れると海難につながる。よって航海視環境に左右される輝度は見張りの視
認性に影響する重要な要素である。
船舶の衝突事故原因について、特に見張り不十分と指摘された原因でも、見張りには就いていたが、衝突
直前まで相手船に気がつかなかった場合は、距離による輝度変化が大きく関わっているのではないかと推察
する。そこで本研究は距離の違いが輝度変化に及ぼす影響を明らかにすることを目的とする。
1.はじめに
場合には船舶の視認が困難になる。本研究は、目視
平成 26 年における海難の現況と対策について
による船舶視認の可否を検討対象とし、物標の視認
(1)
によれば、海上保安庁が認知
に影響を与える背景と視対象の輝度を検討事項とし
した船舶衝突は、全船舶事故隻数 11,658 隻(過去
て調査した。評価においては、海面と物標との視認
5 年間の総計)のうち、最多の 3,412 隻(29%)を
可能性を検討する輝度差弁別閾を用いたビジビリテ
占める。さらに、過去 5 年間の衝突事故原因は、①
ィレベル(VL)を用いた。
(海上保安庁発行)
見張り不十分(57%)
、②操船不適切(27%)であ
輝度差弁別閾(⊿Lmin)とは、対象物視認におけ
る。
る、背景輝度に対する最小の輝度差で、人間の心理
このような衝突事故の現状から見張り不十分を
的・生理的な特性を表す閾値であり、背景輝度:L
原因とする船舶衝突事故を減少させることは、海難
を用いて次式(1)で示される。
の発生を減少させることにつながる。
⊿Lmin=0.05936×{(1.639/ L)0.4+1}2.5×L (1)
本研究は特に見張り不十分の中でも見張りを行
3.調査方法
なっていたが、衝突直前まで相手船に気がつかなか
測定は、2015 年 3 月 11 日~3 月 19 日の 9 日間に
った場合に注目する。
渡り、練習船深江丸の平成 26 年度春季研究航海を利
目視による見張りの場合、操船者は背景輝度と船
用して行った。研究航海の航跡を図 1 に示す。
舶の輝度との差から船舶を発見する。背景輝度と船
舶の輝度との差が小さければ船舶の発見は困難で
輝度の測定では、二次元色彩輝度計(コニカミノ
ある。海上における物標の視認と見張りに関する先
ルタ製 CA-2000)を深江丸船橋内左舷側の手摺りに
(2)
は、天空輝度と船舶の輝度差は、距離が
ロープで固定し用いた。この二次元色彩輝度計は、
大きくなるほど小さく、船舶が接近するにつれて大
従来の輝度計とは異なり、点(一次元)ではなく面
きくなる傾向があり、これは太陽高度の違いに関係
(二次元)で輝度測定を行なうことが可能である。
行研究
なく得られた結果であると述べている。本研究では、 本研究はこの特性を利用し、天空輝度、海面輝度、
物標までの距離と輝度の関係が見張りの視認性に
対象となる物標輝度を測定後に専用の解析ソフト
及ぼす影響を明らかにするために、距離と輝度の関
(CA-S25w)を用いて解析した。解析では、天空は
係を航海中に収集した視環境データより検討する。
他の物標の写りこまない明らかに天空、海面は他の
物標の写りこまない明らかに海面である位置にスポ
2.目的
ットを配置した。スポットの広がりは画像上では 40
航海中の相手船の視認には、輝度差弁別閾が関係
ピクセルであり,これは視角 1°に相当する。測定
しており、背景の天空輝度に対して輝度差が小さい
値はスポット内の各ピクセルで得られた輝度値を平
144
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表2
均し得た。
4.結果
4.1
輝度測定
測定概要(備讃瀬戸北航路)
測定値
測定個所
(cd/ m2)
距離
(miles)
E
天空輝度
4546
F
小島山頂付近
3261
6.2
G
高見島
3088
5.0
H
海面輝度
1644
備考 測定年月日時刻/場所
2015 年 3 月 12 日 09:40/備讃瀬戸北航路
距離は海図から計測
図1
深江丸研究航海
2015/3/11~3/19
今回は、背景条件を与える天空輝度が 4500cd/m2
E
前後となる条件に近い観測データを抽出した。表 1
~6 にこれらのデータを示す。
G
F
表1
測定概要(安芸灘付近)
測定値
測定個所
(cd/ m2)
天空輝度
A
4071
B
壷神山山頂付近
2497
22.0
C
興居島灯台付近山頂
1287
2.2
D
海面輝度
1171
備考
H
距離
(miles)
測定年月日時刻/場所
2015 年 3 月 13 日 08:00/安芸灘付近
距離は海図から計測
図3
備讃瀬戸北航路(34°20.7N、133°42.6E)
表3
測定概要(小部湾)
測定個所
測定値
(cd/ m2)
天空輝度
4239
近見山山頂付近
3398
海面輝度
1316
距離
(miles)
A
C
B
D
備考 測定年月日時刻/場所
2015 年 3 月 12 日 15:20/小部湾
(34°04.7N 132°46.8E)
距離は海図から計測
図2
安芸灘付近(33°56.9N、132°43.2E)
145
11.4
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表4
測定概要(周防灘)
否かを判断する評価レベルである。ここでは、天空
測定値
(cd/ m2)
測定個所
天空輝度
4288
狗留孫山山頂付近
3144
海面輝度
1506
距離
(miles)
輝度と船舶輝度との輝度差から船舶の視認性を評価
する指標として使用されるものである。VL は⊿L:
背景の輝度と視対象の輝度との差、⊿Lmin:輝度差
弁別閾を用いて次式(2)で表す。
24.5
VL=⊿L/⊿Lmin
(2)
図 4 の場合、視対象物が天空を背景とした場合の
輝度差弁別閾は、式(1)により求められ⊿Lmin=538
(cd/m2)、また、海面を背景とした場合の輝度差弁別
備考 測定年月日時刻/場所
2015 年 3 月 14 日 16:40/周防灘
(33°47.0N、131°07.3E)
距離は海図から計測
閾は、⊿Lmin=318(cd/ m2)であった。そして視認性
の評価レベルを示す天空輝度を背景とした場合の式
(2)により求められたビジビリティレベルは 5.9、
海面輝度を背景とした場合は 1.1 であった。
表5
測定概要(周防灘)
測定個所
測定値
(cd/ m2)
天空輝度
4916
足立山山頂付近
2687
海面輝度
1532
距離
(miles)
A
B
10.3
C
備考 測定年月日時刻/場所
2015 年 3 月 14 日 17:30/周防灘
(33°47.0N、131°07.3E)
距離は海図から計測
図4
明石海峡付近
対象船舶を含む輝度測定
4.2 船舶を対象とした輝度測定
表6
5.考察
測定概要(明石海峡航路 船舶輝度測定)
測定値
測定個所
(cd/ m2)
A
天空輝度
8363
B
対象船舶輝度
5193
C
海面輝度
4847
以上の解析の結果より、以下2点のことが明らか
になった。
(1)天空、島嶼、山頂付近、海面の輝度と視認性
天空輝度と島嶼の輝度を比較した場合、天空輝度
が必ず高い。しかし、天空輝度と海面輝度を比較す
ると、天空輝度が必ず高くなるとは言えず、サング
リッター発生時は海面輝度が高くなる場合がある。
備考 測定年月日時刻/場所
2015 年 3 月 12 日 12:20/明石海峡航路 EN ライン
島嶼および山頂付近の輝度値は、同時観測のデー
タから遠方ほど大きい。また島嶼および山頂付近の
輝度値は天空輝度値が 4500cd/㎡前後となる条件に
得られた輝度値をもとに、前述の輝度差弁別閾を
近い観測データから測定値を抽出した結果と同様に、
使用し、ビジビリティレベル(VL)を求めた。VL
輝度値は遠方ほど大きい。
は視環境下において、ある条件の視対象物が視認領
(2)天空、船舶、海面の輝度と視認性
域に存在し、観測者がその視対象物を視認できるか
船舶の輝度値は、島嶼および山頂付近の輝度値と
146
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
同様に遠方ほど大きい。よって視対象となっている
(6) 橋本進, 航海灯の視認について,東京医科大
船舶の輝度値は観測者に近づくと減少する。すなわ
学雑誌,第 50 巻 5 号, pp.850-858,1992.
ち、視対象となっている船舶は観測者に近づくほど
海面との輝度差が大きくなる。しかし、近づいてく
る船舶の輝度値は下がるので、海面輝度値が低いと
ビジビリティレベルは下がる。
6.結論
本研究は視認対象物のビジビリティレベルにつ
いて、(1)天空、島嶼、山頂付近、海面の輝度およ
び(2)天空、船舶、海面の輝度を同時観測した結果
を考察し、以下のような結論を得た。
同時刻すなわち同時観測に基づく輝度の測定結
果は、物標が近くなるほど輝度値が減少することを
示している。
ビジビリティレベルを用いて視認性を評価する
場合、島嶼および山頂付近の輝度値と比較すると、
近づいてくる視対象物の輝度値は一様に小さくなる。
これは同時に視対象物である船舶の輝度値が小さく
なることを示している。よって海面輝度が低い場合、
船舶が観測者に接近するほど輝度差が小さくなり、
ビジビリティレベルは下がる。
海面輝度が低い場合、
観測者に近づく船舶を目視により視認することは困
難になる可能性がある。すなわち、見張り不十分と
され、衝突直前まで相手船に気がつかなかった場合
は海面輝度、および相手船までの距離が関係する。
海面輝度が低い曇りや雨などの航海視環境では、
航海灯の早期点灯および、目視以外の見張り手段で
あるレーダーの有効活用により周囲の船舶を系統的
に監視することが望ましい。
参考文献
(1) 海上保安庁,平成 26 年における海難の現況と
対策について,p.12-13,2015,3,18.
(2) 古莊雅生, 海上における物標の視認と見張り,
日 本 航 海 学 会 論 文 集 , 第 98 号 ,
p.187-194,2000.
(3) 古莊雅生, 水平線の視認と見張り,日本航海
学会論文集,第 93 号, p.35-41,1998.
(4) M.G. J. Minnaert , Translated and Riviced by Len
Seymour , Light and color in the outdoors,
pp102-125,1984.
(5) 成定康平, 道路照明の輝度条件と輝度差弁別
閾,中京大学文学部紀要,第 28 巻 3・4 号,
pp.1-24,1993.
147
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
小型船舶および動揺装置による動揺に対する
生体の立位姿勢動揺と運動負荷
正会員
正会員
○坂牧
瀬田
孝規(鳥羽商船高専)
広明(鳥羽商船高専)
学生会員
非会員
土井根 礼音(東京電機大学)
小川 伸夫(鳥羽商船高専)
要旨
船舶に乗船すると、ほとんどの人たちは疲労を感じ、船舶が小さくなるほどその傾向は強い。しかし、船
舶乗船時の疲労の原因の特定や、その定量化に関する研究はほとんど行われていない。これまでに、筆者ら
は、小型船舶の動揺に対する乗船者の立位姿勢動揺を計測するとともに、立位姿勢動揺によって発生する生
体の運動負荷を算出することで、船舶動揺が乗船者に与える生理的影響を解析してきた。一方、小型船舶で
同一の動揺を再現することは困難であり、生体の状態も個体差や時系列変化が生じる。このため、船舶動揺
と同等な動揺を再現可能な研究環境の構築が必要となる。
本研究は、船舶動揺に対する乗船者の疲労などの研究環境を構築するための基礎研究として、生体の立位
姿勢動揺と運動負荷を指標とした動揺装置の評価手法の構築が目的である。本稿では、並進運動としての上
下揺れ(Heave)、回転運動としての横揺れ(Roll)、縦揺れ(Pitch)の動揺を再現する簡易型動揺装置を用
いた研究環境の構築の可能性について検討を行ったので報告する。
キーワード:労働・人間工学、立位姿勢動揺、運動負荷、小型船舶、動揺装置
1.はじめに
(Pitch)、船首揺れ(Yaw)の動揺を再現する動揺装
船舶に乗船すると、ほとんどの人たちは疲労を感
置が高価である。このため、本研究は、上下揺れ
じ、
船舶が小さくなるほどその傾向は強い。
しかし、
(Heave)、横揺れ(Roll)
、縦揺れ(Pitch)の動揺
船舶乗船時の疲労の原因の特定や、その定量化に関
を再現する簡易型動揺装置を用いた研究環境の構築
する研究はほとんど行われていない。操船者の疲労
の可能性について検討を行ったので報告する。
は、海難の原因とされるヒューマンエラーの要因の
一つと考えられており、疲労に対する適切な対応策
2.方法
が求められている。
2.1
計測システム
これまでに、筆者らは、小型船舶の動揺に対する
筆者らは、これまでに船舶動揺が乗船者に与える
乗船者の立位姿勢動揺を計測するとともに、立位姿
影響の解明を行うために図 1 に示す計測システムの
勢動揺によって生じる生体の運動負荷を算出するこ
開発を行った(1)。同システムは、船舶の床、乗船者
とで、船舶動揺が乗船者に与える生理的影響を解析
の腰部、頭部に設置した 3 台の 3 軸方位角センサ、
。一方、小型船舶で同一の動揺を再現
呼吸量と O2 濃度の計測により生体のエネルギー消
することは困難であり、生体の状態も個体差や時系
費量を計測するエネルギー代謝計(3)、生体の心電図
列変化が生じる。このため、船舶動揺と同等な動揺
や心拍数を計測するテレメータ式のベッドサイドモ
を再現することが可能な研究環境の構築が必要とな
ニタ、生体の姿勢制御のための筋肉の動きを捉える
る。
体表面筋電位計測装置から構成される。3 軸方位角
してきた
(1)(2)
本研究は、船舶動揺に対する乗船者の疲労などの
センサ、エネルギー代謝計とコンピュータは RS232C
研究環境を構築するための基礎研究として、生体の
を介して接続した。計測インターバルは 3 軸方位角
立位姿勢動揺と運動負荷を指標とした動揺装置の評
センサが 0.01s、エネルギー消費量を 10s とした。
価手法の構築を目的とする。一般に、並進運動とし
本研究では、3 軸方位角センサで計測される加速
て前後揺れ(Surge)、左右揺れ(Sway)、上下揺れ
度・角速度により、船舶動揺に対する乗船者の立位
(Heave)、回転運動として横揺れ(Roll)、縦揺れ
姿勢動揺の特徴を解析した。
148
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ている。これは、運動時のエネルギー代謝量を安静
時のエネルギー代謝量で除した値であり、運動によ
エネルギー代謝計
3軸方位角センサ
(頭部)
る全代謝量が安静時の何倍であるかを示す(6)。
本研究では、運動負荷を、METS を参考に、立位姿
勢時のエネルギー消費量を、安静時のエネルギー消
3軸方位角センサ
(腰部)
費量を除した値と定義した(式(2))。なお、安静時
ベッドサイドモニタ
のエネルギー消費量は、座位姿勢時のエネルギー消
コンピュータ
3軸方位角センサ
(床)
費量とし、エネルギー消費量は 5 分間(30 データ)の
体表面筋電位計測装置
平均値とした。
図1
計測システムの概要
運動負荷
2.2 評価指標
2.2.1 立位姿勢動揺
2.3
立位姿勢時のエネルギー消費量
2
安静時のエネルギー消費量
実験概要
船舶の床、生体の腰部、頭部に設置した 3 軸方位
実験は、鳥羽商船高等専門学校生命倫理委員会規
角センサは、各々独立した座標系をもち、その傾き
則に則り実施された。被験者には実験開始前に実験
に応じた重力加速度の影響を受ける。本研究では、
内容の説明を行い、実験への参加について同意を得
船体近傍の地球表面の接平面に、船舶の前方を x 軸
た。
のプラス方向、船舶の右側を y 軸のプラス方向、地
2.3.1
小型船舶を用いた実験
球の中心に向かう軸を z 軸のプラス方向とし、x-y
小型船舶を用いた実験は、鳥羽商船高等専門学校
平面を水平面とした固定座標系を定義し、各 3 軸方
が所有する実習船「あさま」
(総トン数 14t、定員 23
位角センサの加速度、角速度を固定座標系に変換し
名)の船舶内で実施した。実験環境を図 2 に示す。
解析を行った 。
小型船舶の速度は可能な限り一定とし、急な変針は
(4)
並進運動は、前後揺れ(Surge)、左右揺れ(Sway)
、
行わないようにした。視覚情報を排除するために、
上下揺れ(Heave)とした。回転運動は、座標変換を
被験者の立位姿勢動揺は、船舶動揺の予測を可能と
適用した角速度を微分した角加速度を算出し横揺れ
する船外の風景が見えない場所で計測した。被験者
(Roll)
、縦揺れ(Pitch)
、船首揺れ(Yaw)とした。
には、座位 25min、立位 25min、座位 15min の姿勢を
なお、上下揺れに含まれる重力加速度は、
とり、開眼状態で、船首方向である船内の壁を正面
2
9.80665m/s を減じることで除去した。
とするように指示した。座位姿勢の際は、被験者を
動揺の大きさは、船舶の床、生体の腰部、頭部の
船舶内に固定されたクッション性のある椅子に座ら
加速度・角加速度の実効値
(Root Mean Square : RMS)
せた。
として算出した。実効値とは、時系列波形がもつ任
2.3.2
動揺装置を用いた実験
意の時間内における平均的な強さを意味する。実効
動揺装置は、並進運動の上下揺れ(Heave)
、回転
値は式(1)により定義される 。式中の fi は加速度
運動の横揺れ(Roll)
、縦揺れ(Pitch)の動きを、
または角加速度であり、N はデータ数である。実効
一辺 1.0m の正三角形の板に発生させる(図 3)
。動
値は、データ数 2048 個(20.48s)について算出した。
揺は、板の各頂点が台車の上に垂直に立てられたボ
本研究では、
生体の立位姿勢動揺を抽出するために、
ールねじに接続され、AC サーボモータを用いて、ボ
カットオフ周波数 15Hz のローパスフィルタを加速
ールねじの回転を制御することで調整される。
(5)
度・角加速度データに適用した。
1
動揺装置によって発生させる動揺は、板の中心点
に於いて、上下揺れ(Heave)については振幅±6〜
±10cm、周波数 0.5〜1.0Hz、横揺れ(Roll)につい
1
ては角度±0〜±3.1 度、周波数 0〜0.6Hz、縦揺れ
2.2.2
運動負荷
(Pitch)については角度±0〜±3.4 度、周波数 0
運動に要するエネルギー量や運動の強さを表す指
〜0.6Hz で、
sin 波の形状で継続的に動揺が発生する
標として、METS(Metabolic Equivalent)が定義され
環境を設定した。
149
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
3.2
被験者には、椅子で座位 15min、動揺装置上で立
生体の運動負荷
図 4、図 5 で用いた実験データに対応する小型船
位 15min の姿勢をとり、開眼状態で正面を見るよう
舶における被験者の運動負荷、動揺装置における被
に指示した。
験者の運動負荷、および先行研究で行った踏み段昇
立位姿勢
座位姿勢
降運動(30 回/min)における運動負荷(2)を図 6 に示
3軸方位角センサ
(頭部)
す。
小型船舶における被験者の運動負荷、動揺装置に
おける被験者の運動負荷、踏み台昇降運動における
3軸方位角センサ
(腰部)
運動負荷を対象に差があるかを、マンホイットニー
の U 検定を用いて、有意水準 5%で検定を行った結果、
有意差なしとなった。
床
加速度の実効値の平均値
9
3軸方位角センサ(船舶の床)
図2
小型船舶を用いた実験風景
ボールねじ
腰
[rad/s2]
10
頭
9
8
8
7
7
6
6
5
4
5
4
3
3
2
2
1
1
0
0
前後
図4
加速度の実効値の平均値
1.0 m
図3
動揺装置の動揺面
上下
Roll
Pitch
Yaw
腰
[rad/s2]
10
頭
9
8
8
7
7
6
6
5
4
5
4
3
3
2
2
1
1
0
3.結果
3.1
床
9
ボールねじ
左右
小型船舶における加速度・角加速度の実効値
[m/s2]
10
ボールねじ
0
前後
生体の立位姿勢動揺
図5
左右
上下
Roll
Pitch
Yaw
動揺装置における加速度・角加速度の実効値
小型船舶の動揺に対する被験者の動揺を図 4 に示
す。
これは、
被験者延べ 5 名の実験データを対象に、
4.0
5 分間の船舶の床、被験者の腰部、頭部の加速度・
3.5
角加速度の実効値を求め、
床の縦揺れ(Heave)の実効
3.0
運動負荷
値が 1.00〜1.39[m/s2]の範囲にあるデータ 10 個の
平均値と標準偏差をプロットしたものである。
動揺装置の動揺に対する被験者の動揺を図 5 に示
す。
これは、
被験者延べ 5 名の実験データを対象に、
2.5
2.0
1.5
5 分間の床、被験者の腰部、頭部の加速度・角加速
度の実効値を求め、床の縦揺れ(Heave)の実効値が
1.0
1.00〜1.39[m/s2]の範囲にあるデータ 10 個の平均
0.5
値と標準偏差をプロットしたものである。
小型
船舶
図6
150
角加速度の実効値の平均値
[m/s2]
10
テレメータ
(心電図・心拍数など)
角加速度の実効値の平均値
エネルギー代謝計
動揺 踏み台昇降運動
装置
(30回/min)
運動負荷の比較
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
4.考察
船舶動揺や踏み台昇降運動と同等な強度の運動負荷
我々の先行研究により、小型船舶の乗船者の立位
が再現できた。以上より、動揺装置の評価手法とし
姿勢動揺は、
船舶の床の上下揺れ(Heave)発生時に、
て、加速度・角加速度の実効値と運動負荷を指標す
他の方向の揺れが加わることで、関節を使った姿勢
ることの有効性が示唆された。
制御が生じ、乗船者の腰部、頭部の回転方向に発生
6.謝辞
することがわかっている(1)。本研究では、上下揺れ
(Heave)、横揺れ(Roll)
、縦揺れ(Pitch)を発生
本研究は、JSPS 科研費 19651075、公益財団法人長
させる簡易型動揺装置を用いて、小型船舶の乗船者
岡技術科学大学技術開発教育研究振興会による研究
と同様な立位姿勢動揺と、運動負荷を発生させる環
助成(2008 年)
、公益財団法人日本科学協会の笹川
境の構築を目指した。本稿では、先行研究において
科学研究助成(24-724、2012 年)
、および鳥羽商船
比較的大きいとされた上下揺れ(Heave)の実効値を
高等専門学校校長裁量経費(教育研究活動支援)に
再現できるように、簡易型動揺装置において sin 波
より実施したものです。本研究のデータ収集におき
の形状で動揺を発生させた。
ましてご協力頂きました鳥羽商船高等専門学校の皆
様に厚く御礼申し上げます。
図 5 より、動揺装置の動揺に対して、被験者が、
腰部、頭部の縦揺れ(Pitch)、船首揺れ(Yaw)方向
の動きによって、姿勢制御を行う様子が示されてい
7.参考文献
る。しかし、被験者の腰部、頭部の横揺れ(Roll)
(1) 土井根礼音,坂牧孝規,瀬田広明,伊藤政光,
は、図 4 とは異なり、動揺装置の床の横揺れ(Roll)
本間章彦.福井康裕:船舶動揺に対する乗船者の
に比べて大きな値にはなっていない。一方、動揺装
立位姿勢動揺の解析,ライフサポート,Vol.27,
置の動揺によって発生する運動負荷については、図
No.2,pp.45-53,2015.8.
(2) Renon Doine, Takanori Sakamaki, Hiroaki Seta,
6 より、船舶動揺、踏み台昇降運動と同等な強度で
Masamitsu
ある可能性が示唆された。
Ito,
Akihiko
Homma , Yasuhiro
今回、簡易型動揺装置で発生させた動揺は、同一
Fukui:The Exercise Load of Passengers ’
パターンの上下揺れ(Heave)、横揺れ(Roll)
、縦揺
Postural Control Against Ship Motion Using
れ(Pitch)を発生させていた。このため、被験者が
Human Energy Expenditure, Advanced Biomedical
動揺装置の動揺に慣れ、船舶と異なった姿勢制御を
Engineering, (in press).
(3)細谷憲政,雨海照祥,金子道夫,田村俊世,鳥井
行った可能性もある。今後、小型船舶の床の動揺解
析を進め、動揺装置で再現する動揺パターンの検討
嘉彦,鈴木正成,松末智,太田壽城,石川和子,
を行っていく必要がある。
福永哲夫,三橋扶佐子,杉山みち子,森脇久隆,
加藤昌彦:今なぜエネルギー代謝かー生活習慣病
5.まとめ
予防のために,pp.83-95,第一出版株式会社,2005.
筆者らの先行研究に於いて、船舶動揺に対して乗
(4) Thor I. Fossen.:Handbook of Marine Craft
船者は、加速度・角加速度の実効値の計測により、
Hydrodynamics and Motion Control,pp.15-25,
頭部、腰部の回転方向の動きによって立位姿勢を維
John Wiley & Sons, Ltd.
,2011.
持し 、その運動負荷が踏み台昇降運動に相当して
(5) 伊佐弘,谷口勝則,岩井嘉男,吉村勉,見市知
(1)
いることを明らかにした 。
昭:基礎電気回路
(2)
本研究では、並進運動としての上下揺れ(Heave)
、
第 2 版,pp.53-54,森北出版
株式会社,2011.
回転運動としての横揺れ(Roll)、縦揺れ(Pitch)
(6)朝山正己,彼末一之,三木健寿,今村裕行,大西
の動揺を再現する簡易型動揺装置を用いて、加速
範和,藤原素子,宮側敏明,村上太郎,森悟,寄
度・角加速度の実効値と運動負荷の視点で、動揺装
本明:運動生理学,p.54,東京数学社,2013.
置の動揺と船舶動揺を評価する手法を提案し検証実
験を行った。検証実験により、動揺装置の動揺に対
して、被験者が、腰部、頭部の縦揺れ(Pitch)
、船
首揺れ(Yaw)方向の動きによって、姿勢制御を行う
様子が示された。また、動揺装置の動揺によって、
151
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
客船以外での一般乗船者向けの案内放送に関する研究 学生会員◯下薗 夏海(鳥羽商船高専専攻科) 正会員 吉田 南穂子(鳥羽商船高専) 正会員 小島 智恵(鳥羽商船高専) 正会員 鈴木 治(鳥羽商船高専) 要旨 一般公開時、船内への案内放送はその船舶や所属する団体の紹介や注意喚起を行う際に有効であるが、乗
員の少ない船舶では負担がかかる他、マイクを使った放送に慣れていない場合、かえって伝わりにくいとい
う問題があり、実施していない船舶もある。
本研究では、より多くの人々を対象としている公共交通機関の案内放送を調査し、客船以外の船舶で利用
できる簡便な仕組・手法を探したところ、PC によるプログラム再生のほか、スマートフォンによる案内音声
の録音と CD による繰り返し放送が有効であることを確認した。
キーワード:情報支援、一般公開、案内放送、アナウンス
1. はじめに りにくいという問題がある。
近年、客船以外の船舶でも、その船舶や所属する
団体の紹介をする PR 活動のため船内の見学やその
航海に参加できる一般公開や体験航海が多く行われ
ている。これらの船舶は、一般の人の乗船を目的と
していないため、さまざまな手法による船内の案内 (1)
が求められる。案内手段の一つとして、船内への
案内放送がある。PR の他、注意喚起を目的とした内
容を含んでいる。放送原稿の作成、要員の確保など
十分な準備が必要であり、実施されていない船舶も
あることから、このような船舶でも実施可能な手段
を確認する必要がある。 図 1 学生が案内放送を行っている様子
1.1 研究の目的 一般公開時の案内放送の実施は、その船舶の裁量
3. 案内放送と手法 に任されている。これを実施できれば、PR の効果の
船内における案内には乗員が、その付近にいる人
向上が見込める。そこで、本研究では鳥羽商船高等
に直接、案内を行う方法があるが、人員の配置が必
専門学校の、練習船「鳥羽丸」(全長 40m, 244 総ト
要である。一方、案内放送は、広範囲・不特定多数
ン)と、他の交通機関の案内放送を調査し、客船以
の乗船者に向けた周知が可能であるが、どのような
外の船舶で利用できる手法について検討し、いくつ
情報をどう伝えればよいか指針がない。そこで、交
か実施し、乗組員が簡単に実施可能であり、かつ、
通機関の実例から学ぶことにした。 効率の良い放送手段を検証する。
3.1 各交通機関の調査と特色 船舶、鉄道、航空機、バスの案内放送から話速と
2. 鳥羽丸での一般公開時の現状 それぞれの特徴を実際に乗車、案内放送を録音し解
鳥羽丸は、年に数回、PR 活動のため近隣の港であ
る名古屋港や四日市港で一般公開
(2 )
析した。案内放送には、乗員による案内放送と、自
動案内放送があった。表 1 は、各交通機関の自動案
や、体験航海を
行っている。図 1 は、学生が船内指令装置のマイク
内放送の調査結果を示したものである。平均話速は、
を用いて案内放送を行った時の様子である。鳥羽丸
1 分間に 343 文字で、全ての案内放送は女性の声で
ではこのような、案内放送専任の要員の確保は難し
あった。案内放送には、日本語のみか、もしくは、
いのが現状で、また案内放送は慣れていないと声量
日本語と英語の 2 ヶ国語であった。都市部ではその
や話す速度(以下、話速)が不均一となり、聞き取
他に、中国語や韓国語等の言語も使用されていた。
152
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表 2 各交通機関の乗員による案内放送の話速
表 2 は、各交通機関の乗員による案内放送の調査結
果を示したものである。平均話速は、1 分間に 476
種類と場所
文字/分
文字であり、自動案内放送と比べ 1.4 倍速く、使用
津エアポートライン セントレア~津なぎさまち 乗員(船内)
582
伊勢湾フェリー 乗員(船内)
312
名古屋市営地下鉄名城線 市役所駅~栄駅 栄駅 駅員
560
名古屋鉄道 太田川駅~尾張横須賀駅 車掌(車内)
485
されている言語は都市部においても日本語のみであ
った。乗員による案内放送の内容は、注意喚起や乗
り間違いの防止に関することであり、出発時刻が近
づくほど、話速は速かった。この速さの放送は日本
人であれば聞き取ることは可能であるが、外国人に
は難しいと考える。このことから、一般公開中の船
内への案内放送の話速は、低速である必要がある。 3.2 鳥羽丸への船内案内放送の導入 通常、船舶には、船内各所へ放送を行うための装
JR 東海関西本線 名古屋駅~四日市駅 車掌(車内)
ANA 航空機 函館空港~伊丹空港 乗務員(機内)
三重交通バス 車掌(車内)
置として船内指令装置がある。これを利用して、案
570
444
528
4.鳥羽丸への実装 鳥羽丸にはカセットテーププレイヤを搭載した
内放送を行うこととする。鳥羽丸のように乗員が 9
名と少ない船舶では放送要員の確保は難しく、読み
船内指令装置(日本舶用エレクトロニクス製
間違え等による不明瞭・不正確な案内放送を防止す
OHE-3177)があり、これを利用して船内向けの案内
るため、事前に録音した音声を自動で再生する方法
放送を行うこととした。船内の乗船者に伝えたい情
とする。
報(紹介および注意事項)をアナウンス原稿として
3.3 関係法令 作成した。内容は、船舶の紹介の他、注意喚起、救
案内放送の自動実施にあたり、船内における案内
命設備の位置等とした。話速は、遅いほうが効果的
放送に関する法律を調査した。調査した法律は、船
であり、話しやすい 1 分間に 200 文字とした。数回
員法、船舶設備規程、船舶救命設備規則、海上運送
の一般公開で利用後、カセットテーププレイヤが故
法、SOLAS 条約(3)である。この中で、SOLAS 条約
障したため、さらに汎用性および利便性を高めるた
に、
「全ての旅客船は、船内放送装置を備えなければ
め、USB メモリや SD カード、Bluetooth が利用可能
ならない。」、 「船内放送装置は、周辺の騒音より明
瞭に聞こえなければならない。」と規定されているが、
案内放送の実施方法に関する規定は特にないことが
な CD プレイヤ (Pioneer 製 DEH-970) に換装し、同
時に案内放送の内容を改めることにした。案内放送
は、各再生機器と CD プレイヤを図 2 のように接続
分かった。
することで、音声の再生が可能である。どの方法に
おいても、初めに音声を準備する必要があり、今回
表 1 各交通機関の自動案内放送の話速
は、スマートフォンのアプリケーションを用いて、
種類と場所
文字/分
鳥羽市営定期船(船内)佐田浜港~菅島漁港
340
交通機関での話し方や話速、文献 (4)を参考にして録
津エアポートライン(船内)セントレア~津なぎ
さまち
356
音を行った。例えば、誰にでも聞きやすく、素人で
名古屋臨海高速鉄道あおなみ線(車内)
名古屋競馬場前駅~名古屋駅
360
文字から、より滑らかな話速の 250 文字/分とした。
JR 東海関西本線(車内)名古屋駅~四日市駅
370
また原稿は、カセットテープでの実施時に作成した
名古屋市営地下鉄名城線(車内)市役所駅~栄駅
340
名古屋鉄道(車内)太田川駅~尾張横須賀駅
275
表 3 は、鳥羽丸で作成した案内放送と、交通機関で
ANA 航空機(機内)函館空港~伊丹空港
395
行われている案内放送の内容を示したものである。
鳥羽市営バス(車内)
330
三重交通バス(車内)
326
豊橋鉄道バス(車内)
342
mp3 (MPeg layer 3) 形式で録音した。案内放送は各
も確実に話せるようにするため、前回の 1 分間に 200
ものから、より違和感がない用語に変更し、また各
交通機関で行われている案内放送を参考に作成した。
素人が録音をすると話速の他、抑揚やアクセントが
不適切で聞き取りづらいことがある。事前に、案内
放送原稿に利用する用語および、文章を推敲、発声
方法を練習し、専門用語や強調したい単語の前には
153
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
一呼吸おくように工夫した。
グラムの他、テープや CD による方法も有効である
4.1 案内放送作成手順 案内放送に利用する音声は IC レコーダー等でデ
と考える。
ジタル化し録音する。その後、PC 上のソフトを用い
て再生間隔を編集し、mp3 化、および CD 化した。
カセットテープへは CD から録音した。プログラム
を使用して、自動再生する仕組みは、汎用の PC で
開 発 環 境 が 無 料 の プ ロ グ ラ ム ソ フ ト で あ る HSP
(Hot Soup Processor)
(5)
を使用し、先に録音した mp3
ファイルを指定した間隔で再生する。図 3 は、作成
した船内案内自動放送プログラムの実行画面を示し
たものである。PC と船内指令装置との接続は、有線
による接続の他、Bluetooth による無線接続も可能で
図 2 各再生用機器と接続した船内指令装置
ある。この他、船内指令装置に換装した CD プレイ
ヤの機能により、スマートフォンや SD カード、USB
表 3 鳥羽丸と各交通機関の案内放送の内容
メモリといった機器も同様に利用が可能である。 内容
4.2 それぞれの評価 表 4 は、各再生方法の特徴を示したものである。
鳥羽丸
カセットテープは、定間隔・不定間隔での再生が可
能であり、簡単に誰でも使用可能であるが、再生す
各交通
機関
るためのカセットデッキを備えている船舶は少ない
と考えられる。CD は、再生が容易であり、カセッ
船舶紹介
船内注意喚起
救命設備 等
行き先、
乗り換え案内
注意喚起
紹介 等
トテープと同様に定間隔・不定間隔での再生が可能
である。今回、停泊時に使用する案内放送は、乗船
中に 2〜3 回放送するように、5 分〜10 分間隔となる
ようにした。また、航海時に使用する案内放送は、1
時間半の航海を想定し、15〜20 分間隔とした。作成
した船内案内自動放送プログラムは再生間隔(単独
再生、定間隔再生、不定間隔再生)や案内放送の種
類の変更が可能である。CD プレイヤを介した船内
指令装置とスマートフォンとの無線接続も容易であ
ることは確認できたが、電源の確保の面で問題があ
ることがわかった。
4.3 案内放送の効果 作成した案内放送を鳥羽丸の一般公開時に使用し
図 3 船内案内自動放送プログラムの実行画面
て効果を確認するため、乗船者に聞き取り調査を行
った。調査内容は、案内放送への関心度や話速であ
表 4 各再生方法の利便性
る。半数以上が案内放送には気づいており、内容を
聞いている人数は 2 割であった。また、話速は聞き
カセット
テープ
取りやすいという意見を多く得た。男性よりも女性
内放送の必要性について聞いたところ、肯定的な意
作成
再生
定間隔
不定間隔
連続再生
利便性
見が多く、筆者らが作成した船内案内自動放送プロ
の声の方が聞き取りやすいという意見が多く、練習
船に限ることであるが、男子学生が多い中で女子学
生の声が聞こえると注目される傾向がわかった。案
154
△
◎
○
△
○
○
CD
△
◎
○
△
○
◎
プロ
グラ
ム
△
○
○
○
○
○
スマートフォン
ケ ー ブ
ル
-
○
×
×
○
△
無線
-
○
×
×
○
△
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
5.発展と課題 鳥羽丸ではプログラム作成による案内放送がで
認した。なお、システム開発にあたっては、各交通
きるようになった。しかし、多くの船舶で同様なシ
速や内容を参考とした。
機関の案内放送を調査し、そこで行なわれている話
ステムを導入できるわけではない。そこで、本研究
また、それぞれの船で案内する音声情報を mp3 形
の発展としてどの船舶においても比較的、導入が容
式で準備できれば、船内指令装置を使用した案内放
易な仕組みを考えた。 送を行うことが出来るが、そうでない船も多い。そ
5.1 案内放送コンテンツ提供の仕組み ういった船でも、できるような汎用的な仕組みとし
図 4 は、他の船舶向け案内放送コンテンツの提供
て誰でも利用可能な音声ファイルを作成し、配布す
の仕組みを図示したものである。案内放送を作成す
ることで対応する仕組みを提案した。一度、案内放
る段階で手間がかかるのは、案内の原稿および音声
送の仕組みを理解し、利用できれば変更等も乗員自
の作成と、システム化である。本研究の発展として、
ら可能であり、PR 活動のみならず船内での安全確保
鳥羽丸向けの案内放送の原稿を利用し、他の船でも
にも有効的であると考える。
利用できる音声案内データを筆者らが準備し、それ
を配布する仕組みを提案する。その手法は、筆者ら
謝辞 が案内音声を mp3 形式で録音し、その音声ファイル
本研究のデータ収集にご協力頂いた杉野士様、山
を Web page 上に置く。各船舶では、Web page から
下諒也様、調査にあたりご協力を頂いた練習船「鳥
音声をダウンロードし、CD 形式に加工、必要があ
羽丸」の皆様に深く感謝致します。 れば編集して使用するものである。例えば、システ
ム化が難しい船舶では、音声データを必要な時間間
7.参考文献 隔に配置した CD 形式で利用し、リピート再生で対
(1) 杉野士:船内公開中の対応と安全確保のための
応する。これにより利用可能な船舶が増えると考え
手法と提案,日本航海学会誌,第 191 号,pp.90,
る。
2015.1.
特に、用意する案内放送は、多くの船舶で使用で
(2) 鈴木治, 嶋岡芳弘:校内練習船と小艇による学
きるものを準備し、原稿も公開する。さらなる発展
校紹介—アンケートによる都市での船内一般
としては、その都度各船舶に合わせた音声を準備で
公 開 の 効 果 , 日 本 航 海 学 会 誌 , 第 143 号 ,
きればと考える。執筆時点の準備されたデータは、
pp.172-179,2000.3.
(3) 国土交通省海事局安全政策課/監修:2014 年海
下記の Web page からダウンロードが可能である。
http://www.ship.toba-cmt.ac.jp/announce/
上人命安全条約:英和対訳,海文堂出版,2014.
(4) NHK アナウンス・セミナー編集委員会:NHK
アナウンス・セミナー〜放送の現場から,
pp.114-117,NHK 出版,2015.
(5) 大槻有一郎:12 歳からはじめる HSP3.0 わくわ
くゲームプログラミング教室,株式会社ラトル
ズ,2005.
図 4 船舶向け案内放送提供システムの構成図
6.おわりに 本研究では、船舶の一般公開時の案内放送を行う
際に、鳥羽丸のような小型の船では、案内放送専任
の要員の確保が難しく、また十分な練習や準備が必
要であることから、これらを簡便化するために案内
自動放送システムを開発し、また案内放送を記録し
た CD によっても類似な仕組を提供できることを確
155
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
大陸棚石油開発事例の分析に基づく紛争原因の考察
正会員○大河内美香(東京海洋大学)
正会員 黒川 久幸(東京海洋大学)
正会員 逸見
真(東京海洋大学)
正会員 竹本 孝弘(東京海洋大学)
要旨
大陸棚に賦存する石油・天然ガス等への需要により、沿岸国間で大陸棚の境界画定紛争が生じ得る。しか
し、大陸棚境界画定の基準は確立していない。境界画定に際して石油資源等の配分を考慮するか否かも事案
により異なる。大陸棚資源開発事例ごとに、原因、発生形態、解決過程は異なるが、その分析は充分には行
われていない。本研究は、大陸棚石油開発に関連する紛争の国際裁判資料を調査し紛争原因を考察した。さ
らに、石油開発に不可欠な海運の安全性の観点から、石油開発の現実性・具体性を評価し得るかを検討した。
キーワード:海運・物流、国際条約、大陸棚、境界画定、石油資源開発
1.はじめに
の個別性を論じており、議論は決着していない。
日本は、一次エネルギー供給に占める石油の割合
次に②輸送の安全の観点からは、代替/新規航路
が 42.7%(2013 年度)であり、その石油消費の 99.7%
航行可能性、運河・パイプライン建設による航行環
(同年度)を輸入に依存する上、供給源の 83.6%(同
境の変化が石油輸送に与える影響を論じる研究があ
(1)
年度)を中東に依存する 。すなわち、日本の石油
る(5)。輸送路の多様化は、限られた産油国の中での
調達の特徴は、中東石油の長距離海上輸送である。
調達先の分散に比べ、輸送のチョークポイントをパ
この供給源の集中と長距離輸送のリスクを同時に解
イプライン等で代替することで海上輸送のリスクを
消するのは、自主開発石油の単距離輸送であるから、
軽減し、石油調達の要素である輸送の安定に寄与す
日本近海の大陸棚石油開発が注目されてきた。
る。加えて、開発の大水深化により掘削船、シャト
しかし、第一に、大陸棚には海底に賦存する石油
ルタンカー等の特殊船舶運航の必要に伴い、石油開
資源量の 65%があるから、大陸棚の帰属を定める境
発における海運の役割が増すにつれ、輸送の安全に
界の設定は沿岸国の石油資源取得に影響を与え、そ
よる石油供給の安定という視点も普及した。ホルム
の画定は容易ではない。北海大陸棚の境界は、1960
ズ海峡、マラッカ・シンガポール海峡通峡が、日本
年代、英国、デンマーク、オランダ、ノルウェー間
のシーレーンと位置づけられることに表れている。
の交渉となり、地中海大陸棚の境界は、1980 年代、
本報告では、石油資源開発に関連する紛争の国際
チュニジア、リビア、マルタ間の国際裁判となった。
裁判資料を調査し、紛争の原因を考察する。研究全
第二に、大陸棚開発で得た石油の陸域への輸送手
体の目的は、大陸棚開発事例における紛争回避に有
段は、日本の地理的条件からは―海底パイプライン
効なモデル合意を提示することである。
網が完備しない限り―タンカー輸送であるから、調
達先の変更による輸送距離の長短を問わず海上輸送
2.大陸棚石油開発と開発協定
システムの安全の確保が石油調達の安定をもたらす。
2.1
したがって日本の石油調達の安定の核心は、①大
大陸棚の概念
大陸棚の法的定義は海洋法条約 76 条が定める。
陸棚境界画定問題の解決と②輸送の安全管理にある。
海洋法条約 76 条
まず、①大陸棚境界画定問題は国家間交渉や裁判
沿岸国の大陸棚とは、当該沿岸国の領海を越える
で解決する場合の他、境界未画定で共同開発を合意
海面下の区域の海底及びその下であってその領土の
する例もある。また一方沿岸国に紛争の存否の認識
自然の延長をたどって大陸縁辺部の外縁に至るまで
がない場合もあり、大陸棚紛争の解決は一様でない。
のもの又は、大陸縁辺部の外縁が領海の幅を測定す
その一因に、大陸棚境界画定の法的基準が確立し
るための基線から 200 海里の距離まで延びていない
(2)
ていない背景がある。山本(2001) 、三好(1993)
場合には、当該沿岸国の領海を越える海面下の区域
(3)
の海底及びその下であって当該基線から 200 海里の
が、境界画定の基準を理論化するものの、芹田
(1999)(4)は、地理的条件の個性から各事案の解決
距離までのものをいう。
156
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
加えて、同条 4 項から 7 項が、2500m の等深線か
資源開発協定で決定する。協定には、①利権協定(受
ら 100 海里、大陸脚部から 60 海里、又は脚部からの
入国がコストを負担せず、開発を外国企業に従事さ
距離に対し堆積層の厚みが 1%以上ある地点、又は
せ、収入につき利潤分配を受ける形態)、②生産分与
最大 350 海里までを自国大陸棚とし得る旨を定める。
協定(受入国が事業主体として開発を外国企業に委
託し、採掘資源を報酬として支払う形態)、③合弁協
定(受入国国営企業と外国企業が共同出資して開発
事業体を設立する形態)
、④請負協定(受入国がコス
トを負担して外国企業に開発させて報酬として請負
料を支払う形態)等がある(9)。
大陸棚開発に関連する紛争の原因は、沿岸国の主
権や安全保障から、沿岸国と事業者の開発協定にお
ける利潤配分率、
排他的輸送権、販売価格まであり、
紛争回避のために原因解明が必要である。
3.大陸棚開発に関する紛争事例
図1
2.2
大陸棚概念図(外務省)
大陸棚の境界画定基準
大陸棚の権利を複数沿岸国が主張する場合、請求
重複区域が生じる。条約 83 条がこの解決を定める。
3.1
大陸棚境界画定紛争
表1
国際司法裁判所大陸棚境界画定事案一覧(10)
番号
1
2
海洋法条約 83 条
3
4
5
6
向い合っているか又は隣接している海岸を有す
る国の間における大陸棚の境界画定は、衡平な解決
を達成するために、国際司法裁判所規程第 38 条に規
7
定する国際法に基づいて合意により行う
8
9
しかし、具体的画定基準は確立していない。
学説は、芹田が、地理的条件から画定基準は個別
10
化せざるを得ず、紛争の原因は資源であるから共同
11
開発も解決の一つと評価する(6)。他方、事例分析か
ら共通項を抽出し画定基準を理論化する山本、三好
12
は、関連事情や共同開発などの具体的解決を、条約
13
14
15
16
(7)
が定める画定基準としての衡平な解決に含める 。
この画定基準の曖昧さから大陸棚紛争は長期に
亘り、沿岸国は、境界未画定で共同開発に合意する
例もある。背景に、鉱床が境界に位置すれば共同開
提訴年
1967 年
○
1976 年
1978 年
1981 年
1983 年
1986 年
○
○
○
1988 年
○
1991 年
1994 年
○
○
1999 年
2001 年
2004 年
2013 年
2014 年
2014 年
1991 年
○
石油開発に関連する境界画定紛争に○を付した。
発が効率的であること、具体的事項は、沿岸国と事
北海大陸棚では、1967 年、デンマークとオランダ
業者の利潤分配・税率、輸送権、期間等の資源開発
が中間線での画定を主張し、旧西独が海岸線の没入
協定で決定することを挙げられる(8)。
2.3
事件名(当事国)
北海大陸棚(デンマーク・オラン
ダ・旧西ドイツ)
エーゲ海大陸棚(ギリシア・トル
コ)
チュニジア・リビア大陸棚
メイン湾海洋境界(カナダ・米国)
リビア・マルタ大陸棚
陸・島・海洋境界(エルサルバド
ル・ホンデュラス)
ヤンマイエン海洋境界(デンマー
ク・ノルウェー)
カタール・バーレーン海洋境界
カメルーン・ナイジェリア領土・
海洋境界
カリブ海海洋境界(ニカラグア・
ホンデュラス)
領域及び海洋境界(ニカラグア・
コロンビア)
黒海海洋境界(ルーマニア・ウク
ライナ)
コロンビア・ニカラグア
コスタリカ・ニカラグア
ケニヤ・ソマリア
ギニアビサウ・セネガル海洋境界
画定(取下げ)
により中間線では不利となるため、陸地の自然延長
を主張し裁判所に画定基準の判断を求めた。
判決は、
大陸棚開発に関する合意の諸形態
大陸棚開発の排他的権利は沿岸国にある。しかし、
その実現は、沿岸国と事業者の合意に従い探査・採
衡平な解決のための合意か、共同開発すべきとした。
1971 年、3 か国に、英国、ノルウェーが加わり、大
陸棚画定条約が締結された。
掘・生産・輸送の過程を辿る。具体的事項は両者の
157
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
1954 年、海運会社 SATCO との原油輸送契約で優先
的輸送権を与えたことによる。サウジアラビアは、
アラムコには油井から陸上施設までの内航運送権を、
SATCO には外航運送権を賦与したと主張したが、協
定の解釈と石油事業の慣行から協定違反とされた。
アブダビ事案は、アブダビ沖大陸棚の石油開発権
が、1939 年のアブダビと石油開発社の利権協定に含
まれるかが争点となり、否定された。カタール仲裁
も、領海外の公海海底に利権協定は及ばないと決定
した。大陸棚制度が当時未確立であったためである。
アミノイル事案は、OPEC が、原油価格高騰によ
る利潤を抑えるため事業者に対し原油 1bbl あたり
10.12USD の支払いを通知したのを受け、クウェー
図2
北海大陸棚境界図(米国務省)
(11)
トとアミノイルが利権協定改訂を交渉したが合意で
きず、アミノイルが国有化されたことに起因する。
チュニジア・リビア事案で、裁判所は、重複区域
が生じていた両国の利権協定、油田の位置を関連事
4.考察
情として考慮して、境界画定基準を示した。
4.1
大陸棚開発に関連する紛争原因の考察
他方、裁判外の合意では、タイとマレーシアの大
大陸棚開発にあたっては、国家間の境界画定で大
陸棚境界合意があり、境界で発見された油田は共同
陸棚の帰属が決まり、沿岸国と事業者の協定で開発
開発とすることとしている。オーストラリアと東チ
が実現する。この開発工程を意識して日本が計画す
モールは、境界未画定での共同開発に合意し利潤配
る「海洋エネルギー・鉱物資源開発計画」(2013 年
分を 1:9 と定める。ギニアとギニアビサウの境界は、
海洋基本計画)(13)の実現にとっても、大陸棚紛争の
石油探査権を得た外国企業が係争区域での操業を停
解決は必要となる。
止したため2年の早さで仲裁により解決した
(12)
。
国家間の紛争原因は 3.1 のとおり、大陸棚の石油
資源の賦存に関連する境界画定紛争が大宗である。
3.2
石油開発協定に関する紛争事例
他方で、主権・シーレーンの確保等、安全保障を意
受入国と事業者の協定に関する紛争も発生する。
識した紛争や、生物・環境保全を指向する紛争も存
利潤配分率、輸送権、代表権から、国有化に至るま
在する。原因ごとに紛争回避の取組みは異なるから、
で、石油開発協定の解釈・適用が争われる。
有効な施策のためには、紛争当事国の指向を、交渉・
訴訟上の主張から分析することが重要である。その
表2
番号
1
2
3
4
5
6
7
8
石油開発協定に関する紛争事例
事件名(当事国・当事者)
アングロ・イラニアン石油会社(イ
ラン・AIOC)
アブダビ仲裁(アブダビ・石油開
発社)
カタール仲裁(カタール・国際海
洋石油社)
アラムコ仲裁(サウジアラビア・
アラムコ)
BP 仲裁(リビア・BP)
テキサコ仲裁(リビア・テキサコ)
リアムコ仲裁(リビア・リアムコ)
アミノイル仲裁(クウェート・ア
ミノイル)
結果、たとえば、資源開発指向性が高い場合、開発
判決年
1951 年
協定の内容によって紛争回避の可能性が高まる。開
1951 年
カルコンテンツ等により紛争解決のインセンティブ
1953 年
を得るからである。この場合、紛争回避を可能にす
発受入国は、利潤分配・税収・ロイヤルティ・ロー
る資源開発協定の提示が有意義である。もっとも、
1958 年
1980 年、国連多国籍企業センターによりモデル石油
1973 年
1977 年
1977 年
1982 年
開発協定案が作成されたが採択されていない。
仮に、国家 A から C につき、主張の特徴を数値化
するなどの手法により、資源開発指向性、安全保障
指向性、環境保全指向性を可視化し、紛争原因を分
類してみれば、次図のように図示し得る。同一の指
アラムコ事案は、サウジアラビアが、1933 年の利
向性を有する国家間の紛争解決の指針を得る一つの
権協定でアラムコ社に排他的輸送権を賦与したが、
指標となり得よう。
158
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
適用法を基準に、沿岸国間の境界紛争と、沿岸
資源
開発
45
40
国と事業者の石油開発協定に関する紛争に分類
できる。これらの紛争は互いに関連する。
(2) 大陸棚開発に関連する紛争の原因は、資源開発
とそれ以外に分類できる。
5
(3) (1)の国家間境界画定が事業者の開発協定に影
2
主権
30
35
5
響し、事業者の開発協定が国家間の境界画定紛
20
争又はその回避・解決に影響する場合がある。
48環境
(4) 海上輸送の安全性の確立、開発と輸送の具体性
からも、大陸棚開発を評価することの必要性が
国家A
国家B
近年増している。
国家C
本研究の結果を踏まえた、より詳細な紛争原因の
グラフ1
仮定の国家の紛争原因の指向
分類と分類手法の確立、原因ごとの取組み、紛争回
避に有効なモデル協定の考案が、今後の課題である。
4.2
課題
大陸棚の帰属の特定は開発の前提とされてきて
参考文献
いる。他方で、本稿の事例分析からは、開発の実態
(1) エネルギー白書,2015,pp.109,121-122.
は、探査・掘削・生産・貯蔵・輸送の一連のフロー
(2) 山本草二:海洋法, 三省堂,pp.206-207, 2001.
であり、かかる過程を通じて、国家間の境界画定問
(3) 三好正弘:大陸棚境界画定準則に関する一考察,
題の解決に寄与し得る場合もある。
海洋法の新秩序所収,東信堂,p.161,1993.
この開発過程で重要な要素が海上輸送である。開
(4) 芹田健太郎:島の領有と排他的経済水域の境界
発権益に応じた原油の輸送能力を確保する必要上、
画定,有信堂,p.178, 1999.
開発と輸送は一体であるが、近時の開発の沖合化・
(5) 鳥海重喜・高嶋隆太:海上航路ネットワークと
大水深化は、掘削船、浮体式石油生産貯蔵積出設備
エネルギー資源の国際輸送におけるチョークポ
( Floating
イント分析,GIS―理論と応用,Vol.21, No.1,
Production,
Storage
and
Offloading
system/FPSO)、シャトル輸送の安全運航の必要によ
2013, pp.47-55.
って、開発における海運の役割を増している。大水
(6) 芹田,p.178.
深化と沖合化から、海底に固定するリグと沿岸のパ
(7) 山本,pp.206-207.
イプライン輸送が困難となり、FPSO から原油をシャ
(8) 坂元茂樹:海洋境界画定と領土紛争,国際問題,
トル輸送する場合、輸送前の、探査、試掘、掘削、
No.565, p.25, 2007.
生産の段階で、高度の技術を要する船舶の運航とい
(9) 中川淳司:資源国有化紛争の法過程, 国際書院,
う要素が加わるからである。ノルウェーでは、石油
p.58, 1990.
開発に関連する船舶が全船腹中に占める割合が上昇
(10) International Court of Justice,
している(14)。実際、開発の重点が北海からバレンツ
http://www.icj-cij.org, 2015.8.3.
海へ移行し、水深約 400m の油田では FPSO を用いる。
大陸棚石油開発に関する課題は、海上輸送の安全
(11) Department
of
State,
Office
of
Geographer,
Intelligence and Research,
性の確保と具体性の構築から、開発の利点・現実性
http://www.state.gov/documents/organization/62000
を評価することである。とくに、日本の海運業が有
.pdf, 2015.8.3.
する長距離輸送と開発への参入による経験・技術が、
日本近海大陸棚の石油開発に生かされるであろう。
(12) http://www.un.org/Depts/los/LEGISLATIONANDT
REATIES/PDFFILES/TREATIES/index.htm,
2015.8.3.
5.結論
(13) エネルギー白書,2015,p. 214.
本研究では、大陸棚紛争の原因把握のため、大陸
(14) Statistics Norway,
棚開発に関連する裁判資料を調査し次の結論を得た。
https://www.ssb.no/en/transport-og-reiseliv/statistik
(1) 大陸棚の開発に関連する紛争は、紛争の主体と
ker/handelsfl/aar/2015-03-24, 2015.8.3.
159
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
男性中心社会変革のための立法とその問題点
-
女性・女性船員の就労を手掛かりとして
-
正会員 逸見 真(東京海洋大学)
要
旨
日本国憲法は男女の平等はもとより、性差別のない就労の権利も認めている。しかしわが国における女性
の就労は男性に比べて様々に劣位されてきた。戦後、特に 20 世紀後半下半期における国際的な性差別禁止の
流れに従い、政府は男女共同参画社会基本法とこれに続く男女雇用機会均等法他の法整備を進め、女性の積
極的な労働参加及び労働環境の改善を図ってきた。これらの措置により女性の就労は表面的に進捗したかに
見えはするものの、企業における女性管理職の登用は諸外国に比べて著しく低迷したままにある等、実質的
に改善されたとはいい難い状況にある。特に女性船員の採用数の停滞は未だ顕著であるといって良い。その
背景にはわが国特有の堅固な男性中心社会や女性に対する伝統的な考え方の存在がある。法制度の確立には
社会的慣行変革への期待が込められているが、社会の原状と乖離した短絡的な法の整備は実効性に乏しいの
みでなくその安定性も図れない。法の制定では市井の人々の法意識や法文化のあり方も視野に置く必要があ
るのである。本稿では女性就労を素材として、社会慣行の変革に対する法の役割を検討する。
キーワード:労働環境、女性就労、女性船員、男性中心社会、法意識
1. 女性就労支援のための法整備
労働の基本的な取り決めにおける性差別を初めて禁
わが国の憲法において、
男女の平等は第 14 条に、
止してスタートした。1998 年の本法改正では、労働
勤労の権利は第 27 条に記され、男女はその意志の下、
者の募集と採用、配置や昇進についての性差別等、
平等に労働に就く権利が認められている。
1986 年法において努力義務に留められていた事項
が禁止規定に引き上げられる等、前法施行後に指摘
女性の就労にはその意志に拘わらず、歴史的にも
されてきた法律上の不備が見直された。
様々な形で制限を加えられてきたが、戦後の世界的
な人権の下における平等、性差別の禁止の流れは、
上記均等法は基本的な理念として、わが国におけ
わが国の労働市場にも大きな影響を与え、20 世紀の
る女性労働者が性による差別を受けないように図る
後半以降、関係する基本法他の法整備が進んだ。
女性差別禁止法であり、女性の採用、登用という一
男女共同参画社会基本法が国に義務付けた基本
般的な処遇において女性が不利益を被らないよう、
的な計画の策定において、2000 年 12 月、「男女共同
企業に具体的な改善を求めた法である。本法は先の
参画基本計画」が施行された。この計画には 11 の重
基本法、及びこれに準じた基本計画の実現をモット
点目標が掲げられているが、その内容は「男女共同
ーに、法律を用いてその実効性を図ろうとする国家
参画の視点に立った社会制度・慣行の見直し、意識
政策の実現手段の一つであると表現しても過言では
の改革」、
「雇用等の分野における男女の均等な機会
ない。
と待遇の確保」等、11 項目の内、女性の雇用や社会
加えて女性の間接的な差別を招来してきた女性
的地位の向上に関するものが 6 項目と、半数以上を
保護条項を撤廃した改正労働基準法と共に、改正育
児・介護休業法が 1999 年に施行される等、20 世紀
占めている。
末にはわが国における女性の雇用促進のための一連
一方、法制度の面より見れば、男性中心の企業社
の法制度が整った。
会変革の嚆矢と期待された 1986 年施行の男女雇用
機会均等法は、現場での教育訓練、定年、解雇と、
160
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
2. 現在の女性就労の実態
女性の多くは、昇進昇格によるキャリアの蓄積が求
められる市場よりも単純で、必ずしも熟練を必要と
女性労働における男女平等を理念とした国家政
しない市場に就くという(3)。
策の方針や、これを実行面で支える法制度が整った
とはいえ、わが国における女性の就労に大きな改善
男女雇用機会均等法他、女性就労の後押しを目的
は見られていない。海運界における女性船員の採用
とした法制度の効果の如何をこのグラフにおいて読
も例外ではなく、その要因は船員稼業の特殊性、海
み取ろうとすると、1997 年(平成 9 年)に比べ 2012
運企業や船員社会の保守性、家庭と仕事の狭間に立
年(平成 24 年)の女性の有業率は確かに向上している
つ女性の志向性、
わが国特有の社会・文化的背景等、
ことが判る。しかし例えば、2010 年調査の企業にお
多様である。女性船員は大きく女性労働者に含まれ
ける管理職に女性の占める割合について、調査対象
るため、その就労の問題を問うには女性労働者の就
42 カ国中、わが国は下位より数えて 6 位に甘んじて
労状況を検討する必要がある。
いる(4)。数のみではなく、実質的に男性と同等の雇
わが国における女性労働の実態を表したのが、年
用が進んでいるかについては疑問とせざるを得ない
齢別労働力率にいう俗称、M 字型グラフである。女
状況にあり、単純労働を志向しがちな女性就労の実
性就労を縦軸に就労者数、横軸に年齢を取りグラフ
態が反映されていると理解することもできるのであ
化すると、年齢 15 歳頃より上昇する労働力率は 25
る。
歳より下り、35 歳前後で底を打ち再び緩慢に上昇す
このような女性就労に関する一般的な傾向は、専
るも、40 歳後半をピークに完全な下降線に入る(1)。
門職として経験と知識を積むことが予定されている
上記の流れをトレースすれば M 字を描くことによ
船員という職業が、女性には敬遠の対象となり得る
り、この名が付けられている。
ことを示す証でもあろう。
3. 社会的慣行としての男性中心社会
女性の年齢階級別有業率-平成9年~24 年
わが国において実質的な女性就労、即ち男性と差
異のない労働が何故、女性にもたらされ難いのかと
いえば、何よりもわが国の社会が男性中心に動いて
いる実情が挙げられる。
男は外、女は家という慣行は決して新しいもので
はない。家事、子育てを担うべきは女性とする旧弊
の由来はわが国伝統の家制度に求めることができて
も(5)、男性中心という現代社会の慣行としての起源
は、高度経済成長期を通じ世帯主のサラリーマン化
と伴侶の専業主婦化が進んだ過程にありと見て良い
だろう。
家事・子育てを女性専業とすることにより、家か
ら解放された男性を長時間労働に就かせ、企業の経
(総務省統計局統計調査部国勢統計課労働力人口統計室資料)
営あるいは雇用方針通りの配置転換や転勤を可能と
する(労働時間・職務内容・勤務地に係る無限定性(6))
グラフの意味するところは、第一に一般的な傾向
等、戦後の高度成長期に企業が男性を自由に利用で
として、25 歳から 30 歳で結婚や出産を理由に退職、
きる社会環境が整えられたのである。その背景には
子育てに一段落した 35 歳至近から再就職(主として
企業の発展により互恵的な関係を維持できる労使双
非正規労働)に向かうのが女性の就労パターンであ
方の思惑の一致(7)の他、終身雇用の維持、年功賃金
ること、第二に、女性は自身の将来設計において結
の確保、退職後の年金給付と、家庭・家族の自活の
婚または出産退職とその後の復職を考慮し、予めこ
ための夫婦の性別役割分業を正当化する諸制度の確
れを見越して就職先を選定、一般に復職し易い低ス
立があった(8)。最もバブル崩壊より今日に至る中で
キルの業種、いつでも辞められいつでも復帰可能な
労働者全体の失業率・非正規社員は増加、給与水準
仕事を選択する傾向にあることである(2)。実際にも
も低迷し、妻に就業を望む夫も漸次、増加して共働
161
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
き世帯は珍しくなくなった(9)が、未だに男並の待遇
法は、男性中心社会の恣意性という、女性就労を阻
が女性就労に対して進んでいない現実の一例は、管
む社会的慣行変革のための有効な手段の一つとなる
理職への登用状況として先に示した通りである。
と見て良い。制定される法規定の遵守のために義務
わが国の労働市場における女性は依然、弱者の身
の規定を置くのはもちろん、必要であれば罰則を加
分にあり、これを擁護して男性同様の就労の機会に
えることも視野に置き、その実効性を高める施策も
恵まれさせるためにも、関連する法制度による支
講じ得る。
援・扶助は不可欠といえる。しかし女性に男性同様
しかしだからとはいえ社会の実情と明らかに乖
の仕事振りを当たり前のように求める企業がその大
離した法、急進的な変革を求める法を制定しても、
半を占める上、法制度の認める法的な支援の利用が、
企業社会によるその遵守は形式的な内に留まる可能
却って企業の中における女性の立ち位置の揺らぎや、
性が高い。最悪、違法性の認められない範囲での脱
キャリアの形成を妨げるとした見方もある。
法が図られるという、死法化現象をも招きかねない。
有効な法制度確立の検討には、社会に生きる人々の
例えば、わが国の定めた育児休業制度、短時間勤
務制度は諸外国に比べても遜色のないレベルにある
法意識や法文化の実情を考慮する必要も出てこよう。
が、出産・子育てのための長期休業は取得者の仕事
法に対する意識の相違とは、関連する法の遵守にあ
の勘やスキルを鈍らせる実際的な問題以上に、職場
たり、女性の雇用は憲法に規定されている男女平等
における当人の存在感を薄め、ついには短時間しか
故に促進されなければならないという意識と、働く
働かない割高な労働力と看做され、責任のある仕事
のは人であると考えれば雇用における男女平等は当
より遠ざけられる(10)のも稀ではないという。
たり前と認識する観念とでは、女性の就労の促進に
法制度が整えられても、労働環境や労働者、特に
大きな差異をもたらすかも知れない。立法により原
企業やそこで働く男性の意識が従前のままであれば、
状を無理なく且つ性急過ぎず、如何に変え得るか、
立法が期待した効果は望めないといえるだろう。
社会を見据えた慎重な検討による法的な対処が求め
られるのである。
4. 社会的慣行を克服する法の役割
引用・参考文献
女性就労の促進のためには、何よりもわが国の男
性中心社会を変革する必要があると理解できる。男
(1) 総務省統計局国勢調査 e ガイド「年齢別労働力
性優位の原状の続く限り、男性が日常的にこなす長
率(2005 年)」.
時間労働、たとえ不本意でも企業内での生き残りや
(2) 大沢真知子: 男女間賃金格差」, 81 頁, 大沢真知
出世のためと従う配置転換、転勤と、限りのないわ
子・原田順子編: 21 世紀の女性と仕事,所収 2006
が国特有の男性の働き方が女性にも同定されてしま
年.
う。
(3) 大沢 前掲, 85 頁.
更に社会的な環境において、男性と女性を完全な
(4) 海老原嗣生: 女子のキャリア -<男社会>のしく
平等に置くのもまた不可能といい得るのではなかろ
み、教えます-, 58 頁, 2012 年.
うか。どうしても伝統的な社会システム上、家事、
(5) 本田和子: それでも子どもは減っていく, 113 頁,
子育てと別離できない女性労働者にとり、家庭生活
2009 年.
を圧迫する長時間労働の慣行は修正されなければな
(6) 筒井淳也: 仕事と家族-日本はなぜ働きづらく、
らず、転勤についても性別役割分担が完全に解消さ
産みにくいのか-, 103~105 頁, 2015 年.
れない限り、女性への適用には一考の必要があるよ
(7) 筒井 前掲, 103~105 頁.
うに思われる。その具体化として、妊娠・出産・子
(8) 鹿嶋敬: 男女共同参画の時代, 206~207 頁, 2003
育て、あるいは介護と、女性本来の宿命ともいい得
年.
る制約を、公的な福祉、社会サービスの充実により
(9) 筒井 前掲注(6), 71 頁.
可能な限り軽減させた社会的、身体的な基準作りと
(10) 大久保幸夫・石原直子: 女性が活躍する社会, 24
共に、性別役割分担を克服した家事・子育ての男性
負担を進める
(11)
~29 頁, 2014 年.
(11) 森田成也: 資本主義と性差別-ジェンダー的公正
社会政策の伸長と、わが国社会の意
をめざして-, 259 頁, 1997 年.
識改革は不可欠と思われる。
女性就労を促す国家の意志として具現化される
162
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
水産高校生を対象とした進路選択に対する
自己効力尺度についての検討
正会員 行平 真也(福岡工業大学) 非会員 浦上 昌則(南山大学)
正会員 高山 久明(長崎大学)
要旨
本研究は大学・短大生を対象とした浦上(1995)の進路選択行動に対する自己効力尺度について、水産高
校生を対象とした場合の妥当性、信頼性について検討することを目的とした。水産高校生 1,310 名の調査結
果から、因子構造及び信頼性の検討、各尺度の基本統計量と妥当性の検討を行った結果、進路選択に対する
自己効力尺度は、水産高校の生徒に対しても十分に利用可能な尺度であることが示唆された。
キーワード:教育・訓練、自己効力感、進路選択、職業意識
1.目的
データを用い、進路選択に対する自己効力尺度の妥
当性、信頼性について検討することを目的とした。
自己効力感とは、ある行動が自分にうまくできる
かどうかという期待の、本人によって認識されたも
ののことである
2.方法
1)
。そしてこれは、行動を開始する
2.1
か否か、どれくらい努力を継続するか、困難に直面
調査時期および調査対象
調査は 2011 年 6 月から 9 月にかけて、水産高校
した際に、どれくらい耐えうるかを決定するとされ
2)
ている。Taylor & Betz はこの自己効力感に着目し、
10 校に調査を依頼し、得られた回答のうち水産系
進路選択行動に応用している。そしてそのような自
の 1 学年から 3 学年の生徒を対象とした。なお、回
己効力感を測定するために、進路選択に対する自己
答数は 1,310 名であった。
効力感という概念を設定し、尺度を作成した。
浦上
2.2
3)
の進路選択に対する自己効力尺度は、この
z2)
調査内容
Taylor & Bet が作成した尺度を参考に、我が国の
3 部構成の質問紙法を用いた。1 部は属性に関す
大学・短大生の進路選択行動に対する自己効力感を
る設問、2 部は就きたい職業の有無、就きたい職業
測定するものとして提案されており、現在でも我が
に向いているか、就きたい職業にどの程度就きたい
国で最も利用されている尺度のひとつ
4)
と位置付け
かなど職業意識についての設問から構成される。3
3)
られる。しかし、大学・短大生を対象としているた
部では浦上
め、高校生を対象としてこの尺度を用いた研究は阿
(30 項目)を用い、「非常に自信がある(4 点)」か
濱・東
5)
などがいくつかが散見される程度である。
による進路選択に対する自己効力尺度
ら「全く自信がない(1 点)
」までの 4 件法で回答を
6)
その中で、例えば行平ら は水産高校の生徒を対象
求めた。
にこの尺度を用いた調査を実施したが、あくまでも
評点合計値の比較に留まっており、尺度の妥当性、
3.結果と考察
信頼性については十分な検討が行われたとは言い難
3.1
因子構造および信頼性の検討
い。このように高校生を対象とした利用について論
因子構造および信頼性を検討するために、全体を
じるのに十分な知見はまだ得られていないが、この
対象として、探索的因子分析を行った。固有値の推
尺度が高校生にも適用できることが明らかになれば、
移は 11.652、1.307、1.107、0.982、0.886 と続いて
同じ尺度を用いた先行研究との比較など広い展開が
いた。固有値 1 以上を基準とするなら 3 因子、固有
期待できる。そのため、水産高校生を対象として進
値の推移状況を考慮するならば 1 因子を抽出するこ
路選択行動に対する自己効力尺度の検討を行うこと
とが適当と考えられた。また平行分析を行った結果
は有用と考えられる。
では、2 因子が示唆された。この尺度は概ね 1 因子
そこで本研究では、水産高校生を対象とした調査
構造と見なすことができ、
全 30 項目の単純和をもっ
163
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表1
因子分析結果
8. 何かの理由で卒業を延期しなければならなくなった場合,それに対処すること。
5. もし望んでいた職業に就けなかった場合,それにうまく対処すること。
13.就職したい産業分野が,先行き不安定であるとわかった場合,それに対処すること。
14.将来のために,在学中にやっておくべきことの計画を立てること。
22.今年の雇用傾向について,ある程度の見通しを持つこと。
4. 5年先の目標を設定し,それにしたがって計画を立てること。
25.学校の就職係や職業安定所を探し,利用すること。
29.卒業後さらに,大学,大学院や専門学校に行くことが必要なのかどうか決定すること。
15.欲求不満を感じても,自分の勉強または仕事の成就まで粘り強く続けること。
30.望んでいた職業が,自分の考えていたものと異なっていた場合,もう一度検討し直すこと。
1. 自分の能力を正確に評価すること。
9. 将来の仕事において役に立つと思われる免許・資格取得の計画を立てること。
19.自分の将来の目標と,アルバイトなどでの経験を関連させて考えること。
27.自分の職業選択に必要な情報を得るために,新聞・テレビなどのマスメディアを利用すること。
12.ある職業についている人々の年間所得について知ること。
6. 人間相手の仕事か,情報相手の仕事か,どちらが自分に適しているか決めること。
24.就職時の面接でうまく対応すること。
21.いくつかの職業に,興味を持っていること。
11.自分の理想の仕事を思い浮かべること。
28.自分の興味・能力に合うと思われる職業を選ぶこと。
16.自分の才能を,最も生かせると思う職業的分野を決めること。
7. 自分の望むライフスタイルにあった職業を探すこと。
18.現在考えているいくつかの職業のなかから,一つの職業に絞り込むこと。
10.本当に好きな職業に進むために,両親と話し合いをすること。
23.自分の将来設計にあった職業を探すこと。
26.将来どのような生活をしたいか,はっきりとさせること。
17.自分の興味を持っている分野で働いている人と話す機会を持つこと。
2. 自分が従事したい職業(職種)の仕事内容を知ること。
20.両親や友達が勧める職業であっても,自分の適性や能力にあっていないと感じるものであれば断ること。
3. 一度進路を決定したならば,「正しかったのだろうか」と悩まないこと。
てその得点とする
3)
1因子抽出
初期解
.496
.465
.642
.659
.639
.589
.617
.519
.546
.626
.564
.603
.572
.593
.619
.585
.584
.438
.649
.678
.707
.701
.656
.590
.717
.662
.660
.645
.537
.519
2因子抽出
F1
F2
.811
-.284
.756
-.262
.730
-.050
.574
.119
.557
.113
.538
.081
.513
.135
.498
.048
.480
.094
.463
.195
.461
.131
.456
.177
.437
.162
.435
.186
.424
.225
.400
.214
.325
.287
.271
.189
-.185
.869
-.073
.786
.074
.668
.124
.611
.086
.601
.032
.587
.172
.580
.121
.572
.198
.492
.212
.463
.196
.367
.251
.292
ことが一般的である。上記の探
以上のような結果から、この尺度に関しては 1 因
索的因子分析の結果からも、今回の対象においても
子構造と見なすことはもちろんであるが、2 因子を
従前の研究と同様に 1 因子構造を仮定することは十
想定することもできる。そこで複数因子を抽出する
分に妥当なものと考えられる。しかし、2 もしくは 3
ことも排除せず、1 因子を仮定したオリジナルの得
因子構造と見なすこともできる。そこで、複数の因
点化とともに、今回のデータから得られた 2 因子構
子数を抽出した場合について検討を行った。
造を用いた得点化も行い、以後の分析を進めること
心理統計の分野で近年一般的に用いられている分
とした。2 因子構造を用いた得点化は、全体を対象
析手法である最尤法およびプロマックス回転を用い
として 2 因子を抽出し、最尤法およびプロマックス
た分析後の因子パターンを検討すると、3 因子より
回転を用いた因子パターンをもとにする。因子パタ
も 2 因子を抽出する方が単純構造に近く、また解釈
ーンが.50 程度以上であることや推測される因子の
も容易な因子が抽出されていると判断できた。また
意味内容と項目と内容的対応関係などを総合的に判
平行分析も 2 因子を示唆するので、2 因子を抽出す
断し、8 項目ずつ(表 1 の枠で囲まれた項目)を選
ることとした。
出してそれぞれの下位尺度(「課題・問題解決」尺度、
初期解および 2 因子を抽出した場合の回転後の因
「将来探究」尺度)得点を算出した。それぞれの尺
子パターンを表 1 に示す。第 1 因子には「8.何かの
度の平均値および標準偏差、また信頼性の指標とし
理由で卒業を延期しなければならなくなった場合、
てα係数を算出した。
それに対処すること」などが高い因子パターンを示
表 2 に示されるように、オリジナルではいずれの
していた。これらは現在や将来に起こりうる問題、
対象群においても.9 台中盤のα係数が認められた。
課題に対処する行動群と考えられる。また第 2 因子
また、「課題・問題解決」
、
「将来探究」の下位尺度に
には「11.自分の理想の仕事を思い浮かべること。」
おいても、ほとんどの対象において.8 台のα係数が
などが高い因子パターンを示していた。こちらは自
得られている。これらのことから、いずれの尺度も
分の将来を探求、探索し、決めていくことに関する
利用に十分な信頼性を持っていると考えられる。
行動群といえる。そこで前者を「課題・問題解決」
次に、これらの各尺度の間の相関係数について検討
因子、後者を「将来探究」因子と命名した。これら
した結果、オリジナルと「課題・問題解決」および
の因子間相関係数は.818 と高い値であった。
「将来探究」の 2 尺度の関連は、いずれの対象にお
164
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表2
対象群別の尺度の基礎統計量、信頼性係数、および尺度間相関係数
全体
男子
女子
航海
機関
食品 栽培他
情報
1年
2年
3年
平均
標準偏差
2.69
0.49
.94
2.71
0.49
.94
2.59
0.49
.95
2.80
0.46
.93
2.66
0.51
.95
2.64
0.47
.94
2.69
0.52
.95
2.60
0.42
.93
2.67
0.51
.95
2.66
0.48
.95
2.72
0.48
.94
平均
標準偏差
2.53
0.53
.82
2.56
0.53
.82
2.42
0.51
.83
2.64
0.53
.80
2.52
0.55
.84
2.47
0.50
.82
2.54
0.57
.85
2.44
0.43
.74
2.51
0.55
.88
2.52
0.52
.82
2.56
0.53
.82
平均
標準偏差
2.85
0.58
.88
2.87
0.58
.88
2.76
0.59
.89
3.00
0.54
.86
2.80
0.60
.88
2.78
0.57
.88
2.87
0.62
.91
2.74
0.55
.88
2.83
0.61
.89
2.82
0.58
.88
2.89
0.58
.88
.900
.910
.708
.899
.909
.707
.902
.912
.706
.889
.889
.653
.909
.926
.749
.894
.911
.698
.920
.901
.727
.843
.916
.644
.921
.922
.752
.898
.914
.713
.890
.899
.677
オリジナル
α
課題・問題解決
α
将来探究
α
尺度間の相関係数
オリジナル−課題・問題解決
オリジナル−将来探究
課題・問題解決−将来探究
いても概ね.9 前後の高い相関係数が認められた。以
ちらともいえない」の間にも有意な差が認められた。
上の結果から、水産高校生を対象とした場合でも1
また「将来就きたい職業はあるか」という問いに
因子構造を仮定し、得点化することは信頼性の点で
「ある」もしくは「なんとなくある」と回答した者
適切と考えられる。また 2 つの因子から構成される
のみに対して、「就きたい職業にどの程度就きたい
と見なすこともでき、それぞれの下位尺度は十分な
か」という設問への回答も求めている。その回答を
信頼性のある指標となりうることが示唆された。
要因とする 1 要因分散分析を行った結果、いずれの
尺度でも有意な主効果が認められた。多重比較の結
3.2
妥当性の検討
果、いずれの尺度でも「必ず就きたい」の方が「就
妥当性を検討するため、3 つの尺度得点と職業意
きたい」「出来れば就きたい」よりも、「就きたい」
識の各項目との関連を検討した(表 3)。まず「将来
の方が「出来れば就きたい」よりも自己効力感が有
就きたい職業はあるか」という問いに対する回答と
意に高いことが認められた。
「将来就きたい職業はあ
の関連を検討する。この設問への回答を要因とする
るか」という問いに「ない」と回答した者には、「就
1 要因分散分析を行った。その結果、いずれの尺度
きたい職業を見つけようとしているか」という設問
でも有意な主効果が認められ、将来就きたい職業が
を設け、「はい」か「いいえ」かの二者択一で回答を
あるとする回答者の方が、自己効力感が有意に高い
求めた。その結果、オリジナルおよび「将来探究」
ことが示された。多重比較の結果、オリジナルおよ
において有意な差が認められた。すなわち、現在に
び「将来探究」尺度においては、「ある」と「なんと
おいて就きたい職業がないものにおいても、自己効
なくある」
、「ある」と「ない」、「なんとなくある」
力感が高いものの方がそれを見つけようとより積極
と「ない」のすべての間に差が認められる。「課題・
的態度であることが示された。ただし、「課題・問題
問題解決」尺度では、「ある」と「なんとなくある」
解決」尺度においては、そのような差は見出せなか
および「ない」の間に差が認められた。
ったが、就きたい職業を見つけるという行動との対
応関係を考えれば納得できる結果と考えられる。
次に「将来就きたい職業はあるか」という問いに
「ある」もしくは「なんとなくある」と回答した者
以上の結果より、自己効力感の高い生徒は、将来
のみに対して、「就きたい職業に向いているか」とい
就きたい職業がより明確になっており、またそれに
う設問への回答を求めた。その回答を要因とする1
自分が向いていると判断しており、さらにそれによ
要因分散分析を行った結果、いずれの尺度でも有意
り就きたいと願っているとまとめることができる。
な主効果が認められた。多重比較の結果、いずれの
加えて、将来就きたい職業を現在は持っていない者
尺度でも「向いている」とする回答者の得点が、「少
の中でも、自己効力感の高い生徒は職業を見つけよ
し向いている」「どちらともいえない」「少しも向い
うとしていることも示された(ただし「課題・問題
ていない」
「向いていない」
と回答したものの得点よ
解決」を除く)。すなわち、水産高校生を対象として
りも有意に高かった。これに加えて、オリジナルお
もこれらの尺度が信頼性および妥当性を備えている
よび「将来探究」においては、「少し向いている」「ど
といえよう。なお、本研究は、進路選択に対する自
165
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
表 3 尺度得点と職業意識との関連
設問1.将来就きたい職業はあるか
1.ある
n
平均
標準偏差
平均
標準偏差
平均
標準偏差
オリジナル
課題・問題解決
将来探究
2.なんとなく
ある
645
2.86
0.47
2.67
0.54
3.09
0.54
3.ない
300
2.58
0.40
2.43
0.45
2.71
0.47
F値
365
2.46
0.47
2.36
0.50
2.54
0.55
多重比較
99.96 ** 1>2>3
51.14 ** 1>2,3
137.10 ** 1>2>3
設問2.就きたい職業に向いているか
1.向いている
n
平均
標準偏差
平均
標準偏差
平均
標準偏差
オリジナル
課題・問題解決
将来探究
2.少し
向いている
234
3.03
0.43
2.81
0.56
3.30
0.50
3.どちらともい
4.少しも
えない
向いていない
278
2.76
0.40
2.56
0.43
2.97
0.49
415
2.65
0.45
2.51
0.51
2.79
0.52
10
2.42
0.77
2.29
0.85
2.64
0.76
5.向いて
いない
F値
8
2.40
0.88
2.28
0.90
2.55
0.83
多重比較
32.10 ** 1>2,3,4,5, 2>3
15.84 ** 1>2,3,4,5
38.96 ** 1>2,3,4,5, 2>3
設問3.就きたい職業にどの程度就きたいか
1.必ず
就きたい
n
平均
標準偏差
平均
標準偏差
平均
標準偏差
オリジナル
課題・問題解決
将来探究
2.就きたい
462
2.94
0.45
2.73
0.55
3.21
0.51
3.出来れば就
きたい
364
2.66
0.40
2.51
0.46
2.81
0.47
F値
119
2.45
0.44
2.34
0.46
2.53
0.49
多重比較
83.04 ** 1>2>3
36.39 ** 1>2>3
119.20 ** 1>2>3
設問4.就きたい職業を見つけようとしているか
はい
n
平均
標準偏差
平均
標準偏差
平均
標準偏差
オリジナル
課題・問題解決
将来探究
t値
いいえ
324
2.49
0.45
2.38
0.48
2.57
0.53
41
2.24
0.61
2.20
0.64
2.26
0.64
2.50 *
1.78
3.05 **
(*<.05、 ** p<.01、多重比較:tukey 法、設問 4 は t 検定。なお、多重比較の欄の数字は設問の選択肢を示す。)
己効力感が 2 因子構造と見なせる可能性も示唆して
and
treatment
of
career
indecision.
おり、今後、さらなる検討が求められる。
Journal of Vocational Behavior, 22, pp.63-81,
1983.
4.おわりに
(3) 浦上昌則: 学生の進路選択に対する自己効力に
本研究では浦上
3)
関する研究. 名古屋大学教育学部紀要(教育心
の進路選択行動に対する自己効
力尺度について、水産高校生を対象とした場合の妥
理学科), 42, pp115-126, 1995.
当性、信頼性について検討した結果、十分に利用可
(4) 富永美佐子: 進路選択自己効力に関する研究の
能であることが示唆された。
現状と課題. キャリア教育研究, 25, pp.97-111,
2008.
参考文献
(5) 阿濱茂樹・東 良典: 工業高校の生徒の職業意
(1) Bandura,A.:
unifying
Self-efficacy:
theory
of
Toward
behavioral
a
識に関する研究. 金沢大学教育学部紀要教育科
学編, 55, pp.65-72, 2006.
change.
Psychological Review,84, pp.191-215. 1977.
(6) 行平真也・高山久明・清水健一・養父志乃夫: 水
(2) Taylor,K.M., & Betz,N.E.: Applications of
産高校生の職業意識に関する研究. 日本航海学
self-efficacy theory to the understanding
会論文集, 129, pp.1-7, 2013.
166
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
エラー防止のための教育・訓練
正会員○國枝
正会員 鹿島
佳明(東京海洋大学) 正会員
英之(東京海洋大学) 正会員
中村
村井
直哉(航海訓練所)
康二(神戸大学)
要旨
海上保安庁によると、毎年 2,000 隻を超える海難が発生しており、2013 年に発生した海難の約 30%が衝突
海難であった。また、原因別では全体の 79%に当たる 1,829 隻が人的要因であり、見張り不十分が全体の約
21%でもっとも多く、次いで操船不適切が約 13%となっている。
筆者らが海上航行中に衝突の危険を感じた事例を分析した結果、見張り不十分などのエラーを発生させる
背後要因として「思い込み」があった。さらに 130 件の衝突海難事例を調査し、背後要因として「思い込み」
が圧倒的に多いことが判った。そこでエラーの背後要因としての「思い込み」への対策として、クリティカ
ル・シンキングを習得する教育訓練を検討した。検討した結果、ケーススタディ及びアクティブ・ラーニン
グによりクリティカル・シンキングを効果的に習得できると考えられる。検討したケーススタディ及びアク
ティブ・ラーニングの効果的な教育・訓練方法を提案する。
キーワード:教育・訓練、ヒューマンエラー、背後要因、思い込み、クリティカル・シンキング
1.はじめに
海上保安庁のまとめによると、2013 年に発生した
海難は 2,036 隻で、過去 10 年間では 2 番目に少ない
B
数となっているものの、毎年 2,000 隻を超える海難
が発生している。その中でも衝突海難が最も多く、
683 隻で全体の約 30%を占めている。原因別では全
体の約 79%に当たる 1,829 隻が人的要因である。ま
た、見張り不十分が原因とされる事例は約 21%の
豊後水道
485 隻で最も多く、次いで操船不適切が約 13%の 309
A
隻であった(1)。
筆者らが海上航行中に衝突の危険を感じた事例
を分析すると、見張り不十分などのエラーを発生さ
せる背後要因として「思い込み」が関わっているこ
とが判った。そこで、日本近海で発生した衝突海難
図1
衝突の危険を感じた事例
事例を調査した結果、約半数に「思い込み」が関連
していた。
直した直後においては、本船の後方から本船より速
筆者らは「思い込み」の対策としてクリティカ
力の速い船舶が明らかに右舷側を追越す態勢で接近
ル・シンキングの習得が有効であると考え、ケース
していた(図 1:A)。当直航海士は、当該他船は右
スタディ及びアクティブ・ラーニングの効果的な教
舷側を追越すものと考え、その後十分な注意を払っ
育・訓練方法を検討したので報告する。
ていなかった。豊後水道を航過し、別府港へ向けて
左転しようと左舷側を確認したところ、右舷側を追
2.衝突の危険を感じた事例
越すと思っていた船舶が左舷側を追越していること
2.1
に気づき、左転を止めた(図 1:B)
。
追越し関係
豊後水道を北上し、左転して別府方面に向かおう
本事例は継続的な見張りが実施されておらず、見
としたときに追越し船と衝突の危険を感じた事例で
張り不十分であったといえる。当直航海士は当初追
ある(図 1)
。
越し船が本船の右舷側を追越す態勢であったことを
別府港に向けて航行中、当直航海士が 08 時に入
確認したが、「追越し船は右舷側を追越す」という
167
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
「思い込み」ににより、その後継続的な見張りをし
すると思い込んだ理由の主なものは、以下のとおり
なかったために左舷側から追越し船が接近している
である。
にもかかわらず、左転しようとした。
(1) 漁船が避航すると思い込んだ。
(2) 他の漁船が避航したので、当該相手船(漁船)
3.事故事例調査
も避航すると思い込んだ。
国土交通省運輸安全委員会(以下、「運輸安全委
(3) 小型船である相手船が避航すると思い込んだ。
員会」)が公表している事故事例の中から、2000 年 1
(4) 航路に沿った針路又は航路に向けた針路に変針
月から 2014 年 12 月までの 15 年間で発生した衝突事
すると思い込んだ。
故海難について調査した。
(5) 第 3 船を避航したため、新たに衝突の恐れが生
日本沿岸の事故から無作為に 130 件の船舶同士の
じたが、保持船である相手船が避航してくれると
衝突事故を抽出し、運輸安全委員会が公表している
思い込んだ。
事故原因について調べた。
3.1
(6) 相手船が避航すると思い込んだ。(特に理由な
調査結果
し)
調査した衝突事故原因は図 2 に示すとおりである。
最も多い事例は、保持船である相手船が漁船の場
合で、たとえ保持船であっても漁船が避航すると思
い込んでいる例である。また、小型船が避航すると
思い込んでいる例が数例あった。特徴的な例として
は、相手船が航路に沿った針路に変針する、あるい
は航路に向けて変針すると思い込んでいる事例が 3
件あった。
4.エラーの背後要因への対策
エラーの背後要因として、最も多いと考えられる
「思い込み」を無くすことは不可能であろうと思わ
れる。ただ、事故防止の有効な対策として考えられ
るのは、エラーの背後要因が事故に繋がる前に当事
者に気づかせることである。エラーに結びつく「思
い込み」が発生しても、気づかせてそれを修正し、
図2
事故に結びつかないようにする。当事者に気づかせ
衝突海難の原因別分類
る工夫が事故防止の対策として重要であると考える。
見張り不十分が圧倒的に多く、全体の約 53%にあ
「思い込み」は自己中心的思考によってもたらさ
たる 69 件であった。操船不適切、居眠り、ルール違
れると考えられるが、その対極にあるのが、合理的
反と続く。さらに、これらの背後要因を調べると、
思考又は批判的思考と呼ばれるクリティカル・シン
「思い込み」によるものが約 46%にあたる 60 件あ
キングである。
思考作業を合理的に行うためのクリティカル・シ
った。
ンキングのために、以下のことに留意する必要があ
本船が海上衝突予防法における保持船にあたる場
合は、避航船である相手船が本船を避けると「思う」
るとされている(2)。
ことは当然である。しかし、本船が避航船にあたる
(1) 思考の広さ。思い込みに陥らないためには、物
場合の「思い込み」による事故事例は 35 件あり、こ
事を多面的に見ること、自分の視点を相対化する
の中で保持船である相手船が避航するとの「思い込
ことが必要である。
み」は 26 件あった。その他の 9 件については、
「船
(2) 今、どんな感情か明らかにする。非合理的な感
首をかわると思った」
、「船尾をかわると思った」と
情の裏には非理性的な思考がある。感情を理性に
の記載はあるが、なぜそう思ったのか特段の理由の
従わせる必要がある。
(3) 思考の深さ。本質まで届いているか、問題に対
記載はなく不明である。
して注意深く観察し、じっくり考えようとする態
本船が避航船であり、保持船である相手船が避航
168
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
度が必要である。
げる内容としては、「思い込み」に陥った過去の事例
(4) 決めつけ思考に対する注意。絶対、当然、決ま
を対象として実施すれば臨場感も加わり、効果的で
っている、あり得ない、などの決めつけに対する
あると考える。
注意が必要である。
例えば、2 章で示した豊後水道における追越し船
(5) 論理性。非理性的思考を理性的思考に変える必
の事例では、以下の内容について少人数で議論する
要がある。
ことによってクリティカル・シンキングが身につく
(6) 明瞭さ。正確さ。曖昧でない。
と考える。
(7) 的確さ。真実かどうか。
(1) 事実と推測を明らかにし、推測を何故事実と思
(8) 公平さ。否定的事例を見落とさない。
っていたか?すなわち、「右舷追越し」は推測で
(9) 妥当性。解決しようとする問題の答えは適切か。
あり、何故そのように考えたのか?「右舷追越し」
(10) 発見した理性的思考を自分に向かって発信し
を事実と思い込まないためには、何が必要だった
実行する。
のか?
2 章で示した豊後水道における追越し船の事例で
(2) 問いを立てる。何故継続的な見張りを怠ったの
上記の留意事項を検討してみる。まず、(1)思考の広
か?RADAR などの計器は使用しなかったのか?
さでは、当直航海士は「後方から追越し船が接近し
(3) 変針までの相当な時間で気づくチャンスはあっ
ており、右舷側を追越す態勢である。」という最初の
たか?どうすれば気づいたか?何によって気づ
一場面で「右舷追越し」と判断し、それが「思い込
くことができたか?
み」となっている。継続的に観測することで、その
(4) 他のことに意識が集中していたことが考えられ
後の異なる場面で他船を見て状況を把握することを
るが、常に安全を確保するにはどうすれよいの
怠っている。(2)感情の観点では、当直航海士は、お
か?
そらく別府港へ向けての変針のこと、さらにはその
(5) チーム機能は活かせたか?コミュニケーション
先の別府入港に意識が集中していたため、現状の他
としての通信は使用できたか?
船との関係に対して十分に思考が向いていなかった
クリティカル・シンキングの習得にディベートの
ものと考えられる。(3)思考の深さという点において
活用を提案している例(3)があるが、我々が取扱う
も、追越し船の行動を瞬時に判断し、以後深く考え
事例では意見の対立をさせる必要はないので、ディ
ていないために、状況の変化を的確に捉えられてい
スカッションが良い。ディスカッションは、様々な
ない。さらに、(4)決めつけ思考に対する注意は払わ
角度から意見を述べることができ、思考の広さ、深
れておらず、最初の見張りで「右舷追越し」と決め
さを求めることもできるので、議論をする中でクリ
つけている。 このように本事例は、クリティカル・
ティカル・シンキングが育まれると考える。
シンキングに必要な留意点の多くが欠けていたこと
5.2
が判る。
アクティブ・ラーニング
中央教育審議会の報告書(2012 年 8 月)には、学
5.教育・訓練による対策
生が主体的に問題を発見し解を見いだしていく能動
「思い込み」からの脱却法として、クリティカル・
的学修(アクティブ・ラーニング)への転換が必要
シンキングを身につける必要があり、そのためには
であると、記載されている。また、文部科学省はア
教育・訓練が重要である。
「思い込み」を防ぎ、又は
クティブ・ラーニングを次のように定義している。
「思い込み」に気づくためのクリティカル・シンキ
「教員による一方向的な講義形式の教育とは異なり、
ングの習得を目的とし、航海当直及び操船技術の習
学修者の能動的な学修への参加を取り入れた教授・
得と関連させた教育・訓練の方法を検討した。
学習法の総称。学修者が能動的に学修することによ
って、認知的、倫理的、社会的能力、教養、知識、
5.1
ケーススタディ
経験を含めた汎用的能力の育成を図る。発見学習、
船長や航海士が過去に経験した事例や、経験から
問題解決学習、体験学習、
調査学習等が含まれるが、
想定される事例を教育・訓練の内容とし、事故原因
教室内でのグループ・ディスカッション、ディベー
や事故防止に関連した議論を行うケーススタディは
ト、グループ・ワーク等も有効なアクティブ・ラー
効果があると考える。ケーススタディとして取り上
ニングの方法である(4)。」これは、思考を活性化さ
169
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
せる学習形態と言え、クリティカル・シンキングの
には背後要因として「思い込み」があることが判っ
習得に適していると考える。
た。そこで、
「思い込み」防止の対策として有効であ
るとされているクリティカル・シンキングを身につ
アクティブ・ラーニングを実施する上で非常に良
い教育プログラムとして、
「揚投錨操船訓練」がある。 けるための教育・訓練について検討した。検討した
航海状態から指定された錨地に投錨する
「投錨訓練」
結果、ケーススタディとアクティブ・ラーニングの
では、事前に船長役の学習者が図 3 に示すように、
導入によりクリティカル・シンキングの習得が可能
海図を利用して計画を立案する。具体的には①指定
と考えられる。
された錨地及び周辺の調査、②針路の決定、③船首
ケーススタディでは、実際に経験した事例を題材
目標の決定、④本船の基準に沿った速力逓減計画の
とすることにより臨場感を増し、少人数での議論を
作成、⑤正横方向目標の決定、⑥予備目標の決定、
行うことで、クリティカル・シンキングを身につけ
⑦航海計器の活用案、などを計画するとともに、チ
られると考える。
ームとして作業をする三等航海士役及び操舵手役の
また、アクティブ・ラーニングでは、与えられた
学習者と事前の打ち合わせを行う。作成した計画は
目的を達成するために学習者が主体的に考えること
船長などの熟練者のチェックを受け、助言を受ける
から、クリティカル・シンキングを習得できると考
とともに、必要な修正を行う。
えられる。
今後、クリティカル・シンキング習得の評価方法
について検討するとともに、提案した教育・訓練の
検証を行うこととしたい。
7.参考文献
(1) 海上保安庁監修:海上保安レポート 2014
(2) 鈴木敏昭:思い込みの心理学,ナカニシヤ出版,
pp.175-177,2009.12.
(3) 鈴木健・大井恭子・竹前文夫編:クリティカル・
シンキングと教育,pp.137-163,世界思想社,
2006.11.
(4) 文部科学省:新たな未来を築くための大学教育
図3
の質の転換に向けて~生涯学び続け、主体的に
投錨計画の例
考える力を育成する大学へ~(答申),中央教
育審議会,2012.8
実際の訓練では、風潮流、航行する他船や漁船の
影響を受けて計画通りとならない場合が多いが、そ
れらに対応して安全で効率的に操船し、投錨する。
訓練終了後には、自己評価を行うとともに、船長な
どの熟練者から評価を含めたデブリーフィングを受
ける。
一連の訓練の中で、学習者は計画、計画の修正、
実行、自己評価及び熟練者からの助言と評価により
操船に関わる知識・技術を習得することができる。
さらに、
幅広く、
深い思考を求められることとなり、
クリティカル・シンキングの習得に適していると考
える。
6.まとめ
衝突海難の原因としては、見張り不十分や操船不
適切などが指摘されているが、さらのそれらの原因
170
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
船舶を利用した災害時の
重傷病者搬送方法に関する基礎的研究
正会員○増田 光弘(東京海洋大学) 正会員
南 清和(東京海洋大学)
要旨
現在懸念されている首都直下型地震に備えて、船舶を利用した傷病者搬送や災害時医療支援船、災害時医
療支援浮体が検討されている。これら災害時医療活動の実現を考えた場合、あらかじめ傷病者の搬送方法や
搬送に伴う注意事項を明確にし、傷病者搬送方法に関する訓練方法や手引きについて検討しておく必要があ
ると考えられる。本研究では、自力で歩行困難な重傷病者を対象に、船舶を利用した傷病者搬送方法につい
て本学所有の練習船汐路丸を用いて実験的に検討を行った。
キーワード:救命、災害時医療支援船、傷病者搬送、二船間移乗、実海域実験
1.緒言
歳の男性(Case 3)とする。土嚢によって人体を模
近年、関東地方を中心とした首都直下型地震の発
擬し、頭部、脚部、重心位置に設置した加速度セン
生に伴う大規模な人的・物的被害に備えて、災害時
サーによって、x, y, z の三軸方向の加速度を計測
医療支援船 1),2)や災害時医療支援浮体などの海上か
する。加速度センサーの計測範囲は±3G、分解能は
らの災害時医療支援が検討されている。このような
0.025G、収集間隔は 0.01 秒である。設置の様子およ
海上での災害時医療活動においては、あらかじめ傷
び座標系を Fig. 1 に示す。
病者の搬送方法や船舶間の移乗の方法、搬送に伴う
本実験では、クレーンを用いての移乗実験を実施
注意事項を明確にし、傷病者の搬送方法に関する訓
する。まず汐路丸 2 号を汐路丸左舷側から接近させ、
練方法や手引きを作成しておく必要がある。
その後、汐路丸左舷に横付けして固定する。
その後、
本研究では、既存の研究
1),2)
では検討が行われて
バスケットストレッチャーをクレーンに接続し、移
いなかった自力で歩行困難な重傷病者搬送に関する
乗を行う。この時、触れ回り防止のために補助ロー
訓練方法の検討および、
手引きの作成を目的とする。
プを結び付け、補助を行う。クレーンを用いた二船
本報では、重傷病者を対象とした船舶を利用した傷
間移乗実験の様子を Fig. 2(左)に示す。
病者搬送について、本学所有の練習船汐路丸を用い
クレーンを用いた二船間移乗実験における海象
て搬送方法に関する基礎的な実海域実験を行い、そ
現象の影響を検討することを目的として、東京海洋
の有用性や課題点について検討および考察を行う。
大学所有の回流水槽の高低差およびクレーンを利用
した陸上移乗実験を実施する。本実験水槽の床面か
2.実験概要
ら手すりまでの高さは 4.7m である。
汐路丸と汐路丸
本実験では、対象傷病者を自力歩行困難な重傷病
2 号の高低差は 5m 程度であり、ほぼ同じ高さである。
者とし、東京海洋大学の練習船汐路丸(総トン数 425t,
海上での実験と同様に補助ロープによる補助を行う。
全長 49.93m,水線間長 46m,型幅 10m,型深さ 3.8m,
陸上移乗実験の様子を Fig. 2(右)に示す。
計画満載喫水 3m,速力 14.61 ノット,最大搭載人数
z
62 名)および小型搭載艇汐路丸 2 号を用いた二船間
移乗実験および比較対象実験として東京海洋大学所
y
有の回流水槽を利用した陸上実験を実施する。実験
当日の天候は晴天、風速は 10knot、波高 0.6m、波周
期 1.5sec である。実験要員は最大 8 名で実施する。
搬送には 14kg のバスケットストレッチャーを用い
Leg
る。被搬送者は 122cm/24kg/7 歳の男児(Case 1)
、
160cm/50kg/17 歳の女子(Case 2)、172cm/68kg/20
Fig. 1
171
x
Head
Experimental setup on basket Stretcher
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
順や各作業要員の役割の確認という点においては不
安定な海上より、実用的な訓練方法となりうると考
えられる。そのため、陸上での訓練によって、手順
や役割を確認してから実海域訓練を行うことが重要
であるといえる。
Fig. 2
Transfer between two ships by crane
Table 1
(Left: actual sea experiment, Right: land experiment).
Phase of transfer between two ships by crane.
Phase
1
2
上げ
移乗手順
(汐路丸~)
3.主要な結論
クレーンを用いた二船間移乗実験の移乗手順を
3 は Case 1 の場合の頭部にかかる三軸加速度である。
映像解析および実験時間測定から、計測された三軸
加速度を Table 1 にしたがってフェーズ分けした。
G
Table 1 のようなフェーズに分けて考察を行う。Fig.
2
1
0
-1
-2 1
0
横移動
3
降下
4
5
6
7
汐路丸2号上
上げ
(汐路丸2号~)
横移動
降下
X
3
2
Y
5
4
50
Z
6 7
100
150
Time [sec]
Fig. 4 は Table 1 に示す各フェーズにおける 1G~3G
Fig. 3
の加速度の発生回数をまとめたグラフである。Fig.
5
の引き上げ時の加速度を示したグラフである。
4
Number
5 は陸上移乗実験より、Case 1 の場合のクレーンで
Fig. 3、Fig. 4 から、フェーズ 3、フェーズ 4 の
バスケットストレッチャー降下から汐路丸 2 号上で
Acceleration on Case 1 in actual sea experiment.
1G
2G
3
3G
2
1
の作業時に大きな加速度が発生するとともに、加速
0
度の発生回数も多いことが確認できる。70 秒~80
1
2
3
4
5
6
7
Phase
秒の間で発生している 2G の加速度は、汐路丸 2 号甲
Fig. 4
Number of occurrences of acceleration.
板上に置かれたバスケットストレッチャーにワイヤ
ーを取り付ける作業を行っている際、海面の変動に
1
G
伴い、汐路丸 2 号が大きく動揺し、バスケットスト
X
Y
Z
0
レッチャーが甲板上に衝突した際に生じたものであ
-1
る。このような加速度が発生する状況は、被搬送者
にとって危険な状況であるとともに、搬送者も転倒、
落水の危険がある。必ずしも経験豊富な人間が搬送
0
Fig. 5
を行うわけではない可能性がある有事の際は小型艇
50
Time[sec]
100
Acceleration at the time of rise on Case 1 in
land experiment.
の波による揺れが与える影響について十分に理解し
4.謝辞
ておく必要があると考えられる。ただし、本実験は
計 12 回実施したが、計測回数を重ねるごとに 1G の
実験の実施および実験結果の整理に協力して頂
加速度の発生頻度が少なくなっており、練度の向上
いた村田莉奈氏(研究当時、卒業研究生)をはじめ
によって被搬送者への負荷を軽減することができる
とした H26 年度研究室所属学生、汐路丸乗組員の皆
可能性があることが確認されている。そこで、実海
様に心より感謝いたします。
域実験より実施しやすいと考えられる陸上での繰り
返し訓練で練度の向上が見込めるかについて検討す
5.参考文献
る。Fig. 5 は Table 1 のフェーズ 3 の工程に相当す
(1) 日本透析医会:災害時医療支援船事業 2005~
るが、Fig. 3 と比較してもわかるように、加速度に
2007,日本透析医会 日本財団助成事業 記録
大きな変化は見られず、また海上と異なり、床面が
DVD,2008.
(2) 井上欣三:「災害時医療支援船構想」プロジェ
動くこともないことから、海上での訓練に代わる訓
クト成果報告書,2009.
練方法とはならないと考えられる。ただし、移乗手
172
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
錨泊船舶の船内電源による陸上への給電システムの開発
-システムの提案正会員 河村 義顕(広島商船高等専門学校) 学生会員○岸
拓真(東京海洋大学大学院)
正会員 南
清和 (東京海洋大学大学院) 正会員 増田 光弘 (東京海洋大学大学院)
非会員 大内 一弘(広島商船高等専門学校) 正会員 水井 真治(広島商船高等専門学校)
要旨
都市部から遠隔地にある島嶼地域・漁村へ大規模災害が発生した場合、都市からの物資輸送やライフライ
ンの応急は遅延化しやすい。そこで、これら沿岸地域が自己完結型の応急を可能とするために、本研究では
他の用件で使用が頻繁に行われる岸壁を利用できない状況を想定し、錨泊船舶の電源(発電機等)を利用し
た陸上への給電システムの提案を行い、その課題について報告する。
キーワード:港湾・係留、災害復旧、電気機器、防水ケーブル
1.緒言
装置は、主配電盤から分岐された船内用の汎用向け
の電源(100V)へ分岐するブレーカを利用しており、
都市部から離隔した沿岸地域に大規模災害が発生
した場合、応急が遅れることが予想される。大規模
環境対策等の一環でこれらの受電システムの搭載数
災害時これらの地域は、離島振興法に定めるように
は増加している。このシステムを双方向給電可能、
自律的な応急が最善策である。特に、離島沿岸地域
すなわち、受電設備から送電設備に利用するための
は、地域の一部または全周が海に囲まれているため、
変更は簡易的であり、応急的に行うことも今後可能
船舶を活用することが可能である。しかし、大規模
となると考えられる。送電時の電源ならびに本研究
災害時、岸壁の損壊によって使用可能な岸壁が限定
で対象とする受電設備に概要を Table 1 に示す。ここ
される可能性が高い。これら岸壁は物資輸送等に使
での送電量は BEMA(1)の調査を参考とするとおおよ
用されるべきで、インフラクチャー(電気・水道・
そ一般家庭約 40 戸分の電気消費量に相当する。
通信・ガス等)を支援する船舶は長期の停泊が想定
されるため、岸壁への係留は適さない。著者らは、
大規模災害時に多くの船が沖待ちのため錨泊してい
ることに注目し、避泊中の船舶を利用した陸上への
給電システムを提案する。本研究では、対象船舶を
一般内航船とした時の本システムの提案とケーブル
総延長距離と電力ロスの関係とケーブルの配置と安
全性に関する課題について検討した。
2.錨泊船舶を利用した災害応急用の陸上へ
の給電システムの概要
陸上側に受電用装置とケーブルの巻上機を用意し、
Fig. 1 に示すように浮体を洋上に設置し、小型のボ
ートにて錨泊している協力船舶に対してケーブルを
送り、船舶側の送電装置(陸上停泊時の給電装置)
に接続する。一般内航船のモデルとして本研究では、
広島商船高等専門学校所属の広島丸に双方向給電装
置を搭載した。双方向給電システムの電気的システ
ムの概要を Fig. 2 に示す。汎用的な陸上からの給電
Main Distribution panel
Fig. 1 Supply electrical power using anchorage vessel
Fig. 2 System of circuit in T.S. Hiroshimamaru
173
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
160
440V
200A
3
440V
76A
200V
100A
50/60
Drop Voltage[V]
Table 1 System of Electrical parameter
Vessel Electrical Generate Voltage[V]
Electrical Generate Current[A]
Mortar Phase
Output Electrical Voltage[V.A]
Output Electrical Current
Shore Receive demanded Voltage[V]
Receive demanded Current[A]
Receive Frequency[Hz]
140
120
100
80
400
3.ケーブルの設置方法に関する検討
3.1
Estimate
電圧降下
500 600 700 800 900
Distance of separation [m]
1000
Fig. 3 Drop voltage cause by cable resistance
本システムは、より簡易的なプラットフォームを
3.2
実現するために最適で最小のケーブルを選定し、利
ケーブルの配置の検討
前節にて、錨泊に必要な水平離岸距離、ケーブル
用することを目標とする。その目標を考える際、ケ
ーブル長による電圧降下を考慮しなければならない。
の摩耗、外力等によるケーブルにかかる水平張力な
電圧降下は三ツ星の技術資料 より式(1)に示す算
らびに挿入している浮体への作用、船舶・ケーブル・
定式で理論値が求まる。L は長さ[m]、I は電流[A]、
浮体の挙動、陸上受電側に生じる力等を総合的に考
S はケーブルの断面積[m ]、e は降下電圧[V]である。
慮し、ケーブルの配置に関する検討を行う必要があ
(2)
2
る。本研究において Fig. 4 に示す、二つのケーブル
30.8 × 𝐿 × 𝐼
𝑒=
1000 × 𝑆
(1)
配置が考えられる。浮体でケーブルを水中で浮遊さ
せる「浮体式水中電線方式」、水平張力を緩衝させる
本算定に用いたケーブルの諸元を Table 2 に示す。
三相の送電能力を持つキャブタイヤケーブルを用い、
ケーブルにかかる張力や海底の砂の摩擦によるケー
浮体を船舶側と陸上側に一つずつ挿入し、電線自身
を海底に沈める「水底電線方式」が考えられる。今
後、風圧力・潮流・波による流体力、船舶等の振れ
ブルの摩耗を考慮している。このケーブルにおける
回り運動等を考慮する必要がある。水理模型による
送電可能な電圧は 440[V]の時、76[A]であった。本ケ
実験、数値シミュレーションによる解析、実海域に
ーブルによるケーブルの長さと電圧降下の関係を
おける実験を行い、最適なケーブルの配置やケーブ
Fig. 3 のグラフに示す。横軸はケーブルの総延長、縦
ルの設置方法の検証を行う。
軸はその時の電圧降下分の電圧を示している。グラ
フからケーブル長 500mでおおよそ 440V の送電で
80[V]程度、約 20%電圧降下を引き起こしているこ
とが分かる。降下した電圧は、変圧器(ステップア
ップトランス)により調整が可能な場合が多い。し
かし、電圧降下はエネルギーの損失であり、可能な
限り搬送に必要なケーブル長を短くし、電圧降下を
減少すべきである。また、環境条件(温度、圧力等)
において電圧降下を引き起す可能性も否めない。よ
って、本システムは電気ケーブルの配置によるケー
ブル長の短縮が課題であり、またこれと相反する、
Fig. 4 Two way of electrical cable arrangements
安全な錨泊に必要な離隔距離との最適化が重要な課
題といえる。
5.参考文献
(1) 日本ビルエネルギー総合管理技術協会:建築物
Table 2 The Parameter of electrical cable
Diameter [mm]
Weight(Not water) [kg/m]
Allowable current [A]
Allowable tension [kgf]
エネルギー消費量調査報告書36報,pp.1-15,
14
0.95
76
28
2015.4.
(2) 株式会社三ツ星:総合カタログ技術資料,p.4244,2000.
174
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
OWC 波力発電ブイのエネルギー吸収性能に関する基礎的研究
(その 3)
学生会員○笹原
学生会員 茨木
裕太郎(東京海洋大学)
信 (東京海洋大学)
正会員
正会員
増田
南
光弘(東京海洋大学)
清和(東京海洋大学)
要旨
本研究では、沿岸地域における津波防災のための OWC 型波力発電装置搭載の津波観測ブイの開発を目的と
している。前報では、OWC 型ブイ模型全体の波浪エネルギー吸収性能を検討するための固定実験の実施によ
り、空気室位置および浮体形状の違いが一次変換効率に与える影響についての確認を行った。本報では、現
在想定している 8 個の空気室に対して 1 つの発電タービンを搭載した際に生じる各空気室間における応答の
位相差が本ブイ全体の一次変換効率に与える影響を明らかにすることを目的とした。
キーワード:海洋工学、津波防災、津波観測ブイ、OWC 型波力発電装置、一次変換効率
1.緒言
供試模型を Fig. 1 に示す。これまでの研究と同様
南海トラフ沖巨大地震による津波の発生に備え
に底面開放型を Type 1、側面開放型を Type 2 と表記
て各地で防災・減災対策が行われている。沿岸およ
する。また、発電機負荷を模擬するノズル面積は空
び港湾地域においては船舶の乗り揚がり、漂流、座
気室水線面積の 1/100 (以下、N100)、1/200 (以下、
礁および衝突の予防のために、高精度な津波情報を
N200)の 2 種類である。振動水柱の固有周期は、Type
迅速に船長および港湾関係者に伝達する必要がある。 1 が 0.87 s、Type 2 が 0.75 s である。本実験では供試
そこで、著者らは南海トラフ沖へ設置するための振
模型は治具により運動を拘束し、完全固定状態とし
動水柱 (Oscillating Water Column: OWC)型波力発電
ている。計測項目は、浮体への入射波、透過波およ
装置を搭載した津波観測ブイの開発を行っている。
び各空気室内部の水面変動および圧力変動である。
著者らは前報 において、波エネルギー吸収構造
入射波条件は、波高 0.05m、周期 0.6~2.6 s の規則波
(1)
の異なる 2 種類の OWC 型ブイ模型による固定式実
とし、0.6 s、0.7 s、0.8 s 以降は 0.2 s 刻みとする。
験により、浮体全体の一次変換効率を明らかにした。
しかしながら、その算出過程においては各空気室間
での応答の位相差を考慮していない。本研究ではブ
イ本体の円周上に配置されている 8 個の空気室に対
してタービンは 1 つと想定している。そのため、各
空気室間で応答に位相差がある場合、各空気室から
の位相差を含む往復空気流が干渉し合うことでエネ
ルギー吸収性能が低下する恐れがある。
Fig. 1 Experimental model of Type 1 and Type 2
そこで本報では、浮体全体のエネルギー吸収量の
3.結果および考察
算出過程に各空気室間における応答の位相差を考慮
浮体全体の一次変換効率 E は、空気室内の水面が
した算定式を用いて、より詳細な一次変換性能を明
空気に対してなした仕事率で定義される浮体全体の
らかにすることを目的とする。
単位時間当たりの波パワー吸収量 Ee と入射波の仕
2.模型実験
事率 Ei との比から算出する(2)。Ei は微小振幅波理論
本実験は東京海洋大学所有の船舶運航性能試験
より式(1)のように表される。
水槽にて実施した。本水槽は長さ 50m、幅 5.0m、水
Ei
深 2.0m で、造波方式はフラップ式である。
175
1
g a2 C g B
2
(1)
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
1.2
速度、入射波振幅、郡速度および浮体全幅である。
1.0
一方、式(2)に示す従来の Ee の算定式では、各空気室
0.8
の仕事率の総和について水面の上下を区別しておら
0.6
E
ここで ρ、g、ζa、Cg、B はそれぞれ水密度、重力加
0.4
ず各空気室間の応答の位相差が考慮されていない。
A
Ee W
T
T
i (t )
dt
Pi (t )
t
i 1 0
0.2
8
(2)
0
ここで、Aw は空気室水線面積、Pi(t)および ηi(t)はそ
研究では、空気室内部でなされる仕事率について水
1.0
面を上げる仕事と下げる仕事を便宜的に正負で区別
0.8
することで、各空気室間の往復空気流の方向および
0.6
E
1.2
10
/L
15
20
N100 The previous method
N100 The present method
N200 The previous method
N200 The present method
0.4
位相差を考慮した算定式として式(3)を提案する。
T
i (t )
dt
Pi (t )
t
i 1 0
5
Fig. 2 Primary conversion effciency in a Type 1
れぞれ空気室番号 i 内の圧力および水位を表す。本
A
Ee W
T
N100 The previous method
N100 The present method
N200 The previous method
N200 The present method
0.2
8
(3)
0
式(3)では定積分内の圧力について絶対値を取るこ
5
10
/L
15
20
Fig. 3 Primary conversion effciency in a Type 2
とにより空気流の方向を与える。各空気室での仕事
5.結言
率は空気の流出時は正となり、流入時は負となる。
一次変換効率の算定について従来手法による算定
本研究では各空気室間の応答位相差を考慮する
結果と式(2)による位相差を考慮した場合の算定結
ことで本ブイのより詳細な性能を明らかにした。そ
果を以下に示す。Fig. 2 および Fig. 3 に Type 1 およ
の結果底板の有無の影響により Type 1 よりも Type 2
び Type 2 における波長・浮体全長比 λ/L に対する一
の方が位相差の影響が強く出ることが明らかになっ
次変換効率をそれぞれ示す。Fig. 2 より Type 1 は位
た。特に振動水柱の固有周期付近での影響が強いた
相差を考慮することで、振動水柱の固有周期付近に
め、位相差を小さくする、もしくは固有周期を長周
おいて約 10%程度一次変換効率が低下していること
期側へシフトするための構造的な改良が課題である。
が確認できる。底面開放型の Type 1 は無指向性が強
また、本報では固定状態での検討であるため、係留
く短周期側でも空気室間での位相差が大きくならな
実験により浮体挙動の影響を検討する必要がある。
いため、算定結果に大きな違いは現れていない。一
6.謝辞
方で、Fig. 3 に示す Type 2 の一次変換効率は固有周
期付近で N 100 が約 30%程度低下、N200 が約 60%
本研究は国立研究開発法人海洋開発研究機構と
程度低下していることが確認できる。この原因とし
の共同研究により行われたことを付記します。また
て、底板によって入射波の伝搬が阻害されるため位
本研究を行うにあたり、協力して頂いた久安隆仁氏
相差が大きくなりやすいためであると考えられる。
(東京海洋大学大学院生)
に心より感謝いたします。
Fig. 2 および Fig. 3 を比較すると位相差の影響は
Type 1 より Type 2 の方が大きいものの、一次変換効
7.参考文献
率の最大値およびピーク範囲では Type 2 の方が高性
(1) 増田光弘・茨木信・笹原裕太郎・南清和:OWC
能といえる。位相差が大きい場合は空気流の干渉で
波力発電装置ブイのエネルギー吸収性能に関
発電性能が不安定になる恐れがあるため、位相差を
する基礎的研究(その 2)、日本航海学会講演会
小さくする、もしくは固有周期を長周期に設定でき
予稿集、Vol.2、No.2、pp.122-125、2014.9.
(2)
るような空気室形状の改良が必要と考えられる。ま
小島朗史・合田良実・鈴村諭司:波力発電ケ
た本研究では、固定式を対象としている。今後は係
ーソンの空気出力効率の解析 ―波エネルギー
留状態での浮体動揺が各空気室間の応答の位相差に
に関する研究
どのように影響を及ぼすのかを検討する必要がある。
Vol. 2、No. 3、pp.125-158、1983.9.
176
第1報―、港湾技術研究所報告、
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
ポジティブな思い出からみた帆船実習の教育効果
正会員
○行平 真也(福岡工業大学環境科学研究所) 正会員 藤原 紗衣子(神戸大学)
正会員 國枝 佳明(東京海洋大学) 正会員 藤本 昌志(神戸大学)
要旨
日本海運界の変革を受け、教育をはじめとする、船員を取り巻く環境が変動し続けている一方で、航海訓
練所における帆船実習は一貫して行われている。本研究では、その帆船実習の教育効果を明らかにするため
の予備的な調査として、帆船実習経験者の抱く「帆船実習におけるポジティブな思い出」に注目し、教育効
果について検討を行った。乗船経験者を対象とした質問紙調査により得た自由記述回答を計量テキスト分析
し、より多く抽出された語の中に、帆船教育の教育効果が表れていると仮定し、分析、考察した。その結果、
「自然」、
「実習」、
「経験」、
「海外」、
「帆船」、
「航海」、
「楽しい」、
「思い出」、
「作業」、
「仲間」の語が抽出さ
れ、特に最も多かった「自然」については、帆船実習により自然に対する畏敬の念や、航海を通じて感じた
自然についての記述が多く見られた。
キーワード:教育・訓練、帆船、思い出、計量テキスト分析
1.はじめに
2.3
日本海運界の変革を受け、教育をはじめとする、
船員を取り巻く環境が変動し続けている一方で、航
分析方法
本報告においては、ポジティブな思い出の自由記
述回答について、
データのクリーニングを行った後、
海訓練所における帆船実習は一貫して行われている。 計量テキスト分析ソフトである KH Coder1-2)を使用
本研究ではその帆船実習の教育効果を明らかにする
し、計量テキスト分析を行った。そして、より多く
ための予備的な調査として、帆船実習経験者の抱く
抽出された語の中に、帆船教育の教育効果が表れて
「帆船実習におけるポジティブな思い出」に注目し、
いると仮定し、分析、考察した。
教育効果について検討を行うことを目的とした。
3.結果
2.方法
2.1
回答者の属性について、有効回答 155 名のうち、
分析対象
男性 140 名、
女性が 15 名と男性が圧倒的に多かった。
大型練習帆船(海王丸・日本丸)における帆船実
年代については 20 歳代から 70 歳以上であり、特に
習の経験者を対象とした。なお、1 ヵ月以上の帆船
30 歳代が 51 名、40 歳代が 48 名と多かった。学んだ
実習を受講したことがあると回答した 155 名を有効
学校については、旧東京商船大学などの商船系大学
回答とした。ポジティブな思い出の回答は 152 名か
に学んだとした回答者が 114 名と最も多く、また商
ら得た。
船高等専門学校で学んだとした回答者が 36 名みら
れた。なお、商船高等専門学校から商船系大学に進
2.2
調査時期と方法
学する例もあるため、回答は重複する。
2013 年 12 月から 2014 年 1 月にかけて、東京海洋
計量テキスト分析の結果、ポジティブな思い出の
大学(旧東京商船大学)及び神戸大学海事科学部(旧
自由記述回答の総抽出語は 7,087 語、語の種類は
神戸商船大学)の卒業生を中心に機縁法により質問
1,230 語で、そのうち分析に用いたのは 997 語であ
紙を配布し実施した。
った。
質問紙の構成は、回答者の属性、帆船実習のポジ
抽出語の出現回数は「自然」、「実習」、「経験」、
ティブまたはネガティブな思い出について問う設問
「海外」、「帆船」、「航海」、「楽しい」、「思い出」、
(教示文の例:「「帆船実習」のポジティブな思い出
「作業」
、「仲間」の順に多かった。
について、単語のみ、文章、どちらでも結構ですの
最も多かった「自然」については、帆船実習によ
で、自由に記述してください。」)、本質問紙への意
り感じた自然に対する畏敬の念や、航海を通じて感
見・感想を問う項目から構成した。
じた自然についての記述が多く見られたことから、
177
第133回講演会(2015年11月6日,11月7日) 日本航海学会講演予稿集 3巻2号 2015年9月30日
実習により「自然」に畏敬の念を覚え、
「自然」を体
感したことが示唆された。2 番目に多かった「実習」
については、そのほとんどが思い出の説明に用いら
れていた。同様に、「経験」については「帆船に乗る
という経験ができた」など貴重な経験だったことに
ついて、自身の体験の説明に用いられていた。「海
外」については海外に行けたことを思い出として記
載する事例が多かった。
これらの結果に加え、帆船実習の教育効果に関す
る既往の研究を踏まえ、教育効果について考察を行
った。
参考文献
(1) KH Coder ホームページ:
http://khc.sourceforge.net/
(2) 樋口耕一:社会調査のための計量テキスト分析
内容分析の継承と発展を目指して,ナカニシヤ
出版,2014.
178
© Copyright 2026 Paperzz