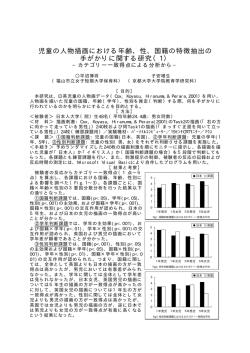
平成 26 年度 卒業論文概要 スワームロボティクスにおける動物行動学に基づく 行動連鎖の時系列解析 B104750 海道 秀彰 【背景と目的】 スワームロボティクスシステム(Swarm Robotics Systems:SRS)とは,多数の比較的単純な ロボットが局所的な相互作用を通じて群れ行動を創発することでタスク達成を図るシステムであ る.このシステムは複数のロボットが相互作用し合う複雑な環境であるため,システムの設計者 が所望の行動を獲得できたかを客観的に評価するための解析法がないのが現状である.本研究で は SRS がタスク達成のために獲得した戦略の解析を目的とし,協調採餌タスクにおけるロボット の群れ行動の特徴抽出法を提案し,その有効性を検証する. 【解析手法】 社会性生物は環境に適応してタスク割当を行う.本研究 では SRS も同様のタスク割当が行われていると考え,解析 手法には 2 つの分野からアプローチを行っている.まず最 初に,複雑ネットワーク理論に基づいたコミュニティ抽出 を行い,ロボット群をいくつかのサブグループに分割する. そして,得られたサブグループに対して,動物行動学に基 づいた行動連鎖の解析方法を適用する.行動連鎖の解析に おいて観察する基本行動を,[餌運び],[餌運び補助],[餌に 接触],[障害物に接触],[探索] の 5 種類に分類し,各行動タ イプ毎に行動推移および持続時間の解析を行う.この行動 Fig. 1: 協調採餌タスク 推移および持続時間に対して χ2 検定や,時系列の観察を行 うことで,ロボット群がタスク達成のために獲得した戦略 の特徴抽出を行う. 解析対象には,Fig. 1 に示す 100 台の自律移動ロボットを用いた協調採餌タスクを取り扱う. 餌は複数台のロボットで押さなければ動かない重さであり,ロボット同士が同時に餌を押して運 ぶ必要がある.制限時間は 5000 タイムステップとし,制限時間以内に出来るだけ多くの餌を運ぶ ことを目的としている.時系列の解析では環境の変化に応じてロボット群が戦略を変化する様子 を観察するため,500 タイムステップ毎に観察を行う.実験では,餌を運べなかった挙動と餌を 4 つ運べた挙動をそれぞれ解析する. 【解析結果】 持続時間解析により得られた [探索] 行動における,比較 的長い時間持続した回数の,500 タイムステップ毎の時系列 を Fig.2 に示す.餌を運べた挙動では,4000 タイムステッ プまでは比較的高い回数を示しながら減少と増加が周期的 に起こっている.これは [探索] と [餌運び] が周期的に繰り 返されている様子である.餌を運べなかった挙動では減少 と増加が繰り返されているが,時間の経過と共に回数が減 少している.これは [探索] から他の行動へ推移した後,他 の行動において停滞している様子を示している. Fig. 2: 50 タイムステップ以上持続 した回数の時系列
© Copyright 2026 Paperzz