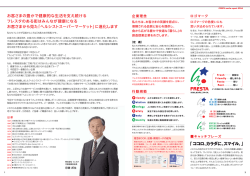
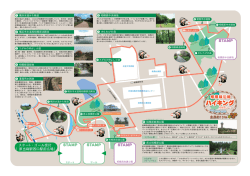
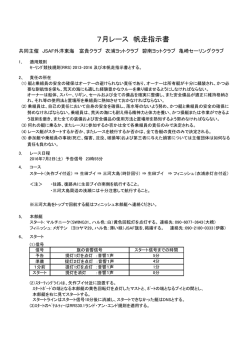
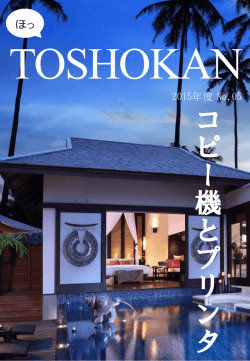
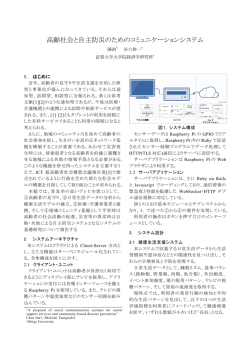
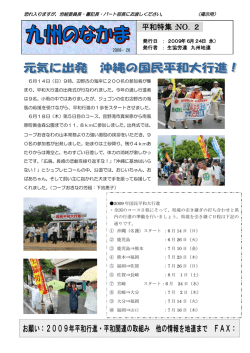
第12回大学コンソーシアムとちぎ 学生&企業研究発表会 帝京大学理工学部ヒューマン情報システム学科 ○遠山貴則(3年),横松秀康,野村佳太,青木克之,熊倉瑞樹 太陽光発電施設を自動点検する移動ロボットの開発 概要:太陽光発電施設での点検・故障検知としてパネル上のホットスポットを熱画像から抽出する方法が期待されている.しかし,大規模施設において人が 熱画像を撮影する方法には限界がある.そこで本研究では,自律移動ロボットを用いてパネルを裏側から撮影して異常を検知するシステムを開発する. 地域貢献:栃木県では大規模太陽光発電の導入拡大に取り組んでおり,蓄電技術と組み合わせて災害時の電源としても期待されている.さらに,自律移動ロボットを用いて太陽光パネルの不具合を 早期に発見できればより安定的な発電に貢献する. 活動スケジュールと役割:1年プロジェクト,自主活動と週1のミーティング,リーダー・遠山,視覚モジュール・横松,ソフトウェア・野村,太陽光パネルやホットスポット・青木+熊倉 ◆ホットスポットとは? 熱画像 RGB画像 課題:メガソーラー発電施設の効率的な点検 ◎帝京スマートエネルギーセンター ・山梨,千葉に26,000坪 ・発電量6MW • 熱画像からホットスポットを検出可能 • 大規模施設内を人力で撮影するのは負担大 図2:ホットスポットの例 図1:帝京スマートエネルギーセンター ソーラーパネルの熱画像を撮影しながら施設内を巡回し解析システムに画像を送信する, 自律移動型の施設設備点検ロボットを開発 見た目では分からないが,周囲よりも温度が相対的に高い 原因:鳥の糞,落ち葉などの汚れ,内部回路の不具合・故障 → 放置すると故障の原因,発電効率の低下 パン・チルト機構 ◆フレーム・駆動系:オープンソースのロボットフレームi-Cart miniを利用 ・独立2輪駆動方式 ・高い汎用性・拡張性 ・屋外環境における十分な走行実績(つくばチャレンジなど) Raspberry Pi 2 熱画像カメラ (FLiR Dev Kit) ◆コンピュータ:市販のノートPC+マイコン ・メインコンピュータ(Apple MacBook Air×1):自己位置の推定,障害物の回避など ・モータドライバ(TF-2MD3-R6×1):オドメトリ計算,モータ制御 ・サブコンピュータ(Raspberry Pi 2×1):画像撮影,パターン認識 ・サブコンピュータ(Arduino×2):センシング,GPS情報の取得 RGBカメラ 800mm ◆センサ:環境やロボット内部の情報をセンシングするために複数のセンサを搭載 ・測域センサ(UTM-30LX-EW×1,URG-04LX×1):周囲の形状情報,障害物をセンシング ・ロータリーエンコーダ:タイヤの回転数を計測 ・慣性センサ:姿勢や振動などの情報を取得 ◆カメラ:環境情報を取得するためのRGBカメラとホットスポット検知用の熱画像カメラ 600mm 400mm 図3:開発したロボットProgress-i 測域センサ Robot View Video Camera ◆自己位置推定:環境地図,測域センサとオドメトリか らパーティクルフィルタを用いて推定(精度約0.1m) → 推定結果と地図から経路を計画 ◆走行モード ・ウェイポイント追従:予め地図上に設定したウェイポイントへの方向 を計算して最大0.6[m/s]で走行 ・障害物回避:ある一定の範囲に障害物を検知した場合に減速し,回 避する方向へ最大0.15[m/s]で走行 ・路面状況判断:パターン認識器(SVMあるいはSDNN)を用いて路面 状況を判断して減速 ロボットの位置 センサからの 距離情報 ウェイポイント RGB 画像および熱画像を撮影し,無線通信でデータを 研究室サーバに送信 → 今後:ホットスポットを解析 図4:パーティクルフィルタを用いた自己位置推定 目的:複数の機能を統合して,屋外における基本的な自律走行能力を確認 スタート&ゴール 方法:学内に帝京トライアルコース(約720[m])を設定して様々な条件下で走行実験 結果:今年度8~11月の間に繰り返し実験を行い,合計27回コース走破 図書館 現在位置 本部棟 • • グラウンド スタート&ゴール 地域経済棟 柔整棟 バイオ棟 実習工場 航空・宇宙棟 ATC 走行位置 格納庫 • 加速度情報など8次元入力 機械棟 本発表では,大規模施設を自動巡回するロボッ トProgress-iの開発について報告した.学内およ び街中における実験によって,屋外環境におけ る基本的な自律走行能力を確認した. [m] 情報電子棟 食堂 図5:システムの構成 C4 C3 C2 C1 C3:アスファルト C4:砂利 C1:渡り廊下 メガソーラ発電施設における実験 • 山梨県南アルプス市 [step] 大学院棟 図6:作成した環境地図 精度0.1[m]で作成されたグリッドマップ. 建物の壁や渡り廊下の柱などが存在す るため,公園などの環境に比べて地図の 作成が容易.しかし,大きなループを描く 経路のため,歪みが生じており,スタート とゴールが一致していない. 図7:路面状況判断 識別器としてSVMを用いて,コース1周分のデータ をサンプルとして与えて学習後,未学習データを適 用.入力変数は,斜め下向きに設置したLRFの情報 (前方の高さの平均値),並進速度,回転速度,Z軸 方向の加速度,ヨー角,ピッチ角,ロール角など多 次元の情報を前処理・正規化したもの. 熱画像の解析方法の検討 システム統合方法の検討 • ウェイポイント追従と障害物回避のバランス 走破性・安定性の向上 • タイヤの径およびギアの変更 • ロボットフレームの更新による安定性向上 図8:発電施設における実験 雑草,砂利,凸凹,坂道など 過酷な路面状況.走行可能 領域を正確に判断する必要. 走破性や安定性の向上も今 後の課題. *つくばチャレンジ2015(街中での実験)へ参加:期間中にトライアルコース(400m弱)を5度走破 謝辞:本研究を進めるにあたり,様々なご指導とご助言を 賜りました,帝京大学理工学部情報電子工学科の小林 靖之先生と山根健先生に感謝致します.
© Copyright 2026 Paperzz