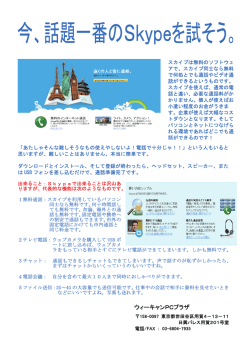
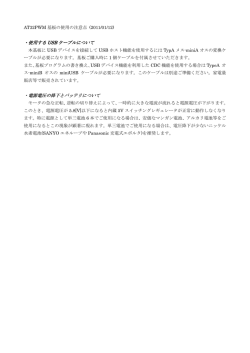
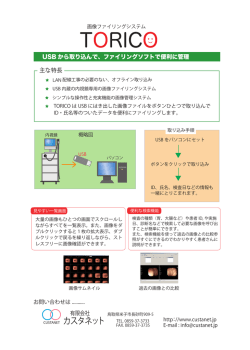
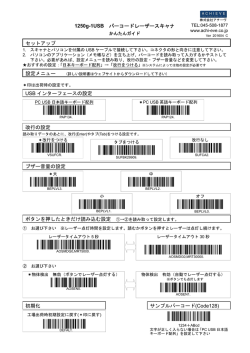
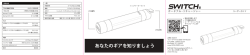
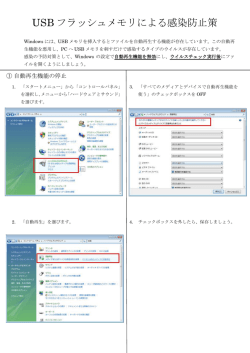
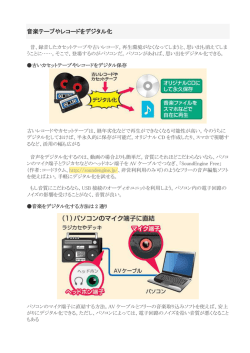
ウェブカメラを用いた複数動体検知の検討 0522317 村山 善透 指導教員 新井 浩志 准教授 1. 目的 監視業務の支援や動画像解析の効率化を目指し、 動画中に存在する複数の動体を検知して追尾する ことを目的とする。 2. 概要 従来はフレーム間差分によって生成した動き画 像を元に動体検知を行っていたが、この動き画像 から複数の動体を区別することは困難であった。 そこで本研究では画像内の動きベクトルを画素 単位で推定するオプティカルフロー推定と呼ばれ る手法を用いる。推定された動きベクトルは動体 ごとに画像上にまとまって分布し、さらに大きさ や角度が一定であると考えられる。そこでこのベ クトルをクラスタリングして、複数の動体を区別 する。 本研究では EM アルゴリズムと呼ばれるクラス タリングアルゴリズムを用いる。クラスタリング 結果には、動体を表すクラスタの他に静止物体や 監視対象ではない微小な動きを表すクラスタが含 まれる。そこで、動きが微小なクラスタと極端に 大きいクラスタは監視対象でないとして除外する。 その後、追尾対象のクラスタをランダムに決定す る。追尾対象のクラスタの重心を動体の重心とし、 追尾対象のクラスタを包括するような矩形を画像 上の動体領域とする。推定された画像上の位置を もとにカメラの姿勢変更することで動体を追尾す る。 (b)追尾経過 図 2 動体検知の様子 動体検知の様子を図 2 に示す。破線と実線の円 で囲った物が動体である。破線で囲われた物体は 画面の左方向に、実線で囲われた物体は画面の上 方向に移動する。 図 2-(a)は動体の初期位置であり、 図 2-(b)が追尾中の画像である。図 2-(b)中の各矩形 はクラスタリングされたオプティカルフローを示 している。図中には二つの動体が存在するが、実 線の円内の動体を追尾している。 3. 4. 実験 提案手法を実装するためのシステムを図 1 に示 す。主な動体検知機能は PC に実装し、H8 マイコ ンにはモーター制御機能を実装した。 USB カメラ サーボモーター USB PC H8H8 RS-232C 図 1 システム構成図 (a)動体の初期位置 結果と今後の課題 物体同士の重なりが尐なく動体の特徴点のまと まりが強ければ、正確な動体の追尾を行うことが できた。また、動体の位置に合わせたカメラの旋 回も行うことができた。 しかし本研究で使用したクラスタリングアルゴ リズムはデータの分布にあわせてクラスタ数を変 化させることができない。従って、画像上に一つ の動体しか存在していなくても指定されたクラス タ数にデータを分割するため、正確な動体の検知 を行えない場合があった。また、フレーム間で動 体の情報の関連付けが行われていないので必ずし も同じ動体を追尾し続けるとは限らない。 今後はより理想的なクラスタリング結果を得る ため、データの分布に対しクラスタ数を柔軟に変 更可能なアルゴリズムを用いることと、フレーム 間で動体の情報を関連付けるために新たな特徴量 を検討することが望まれる。
© Copyright 2026 Paperzz