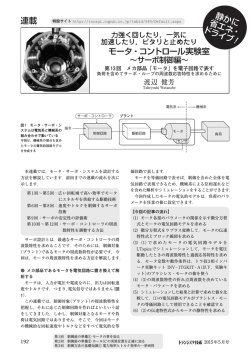
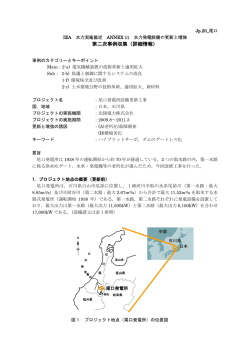
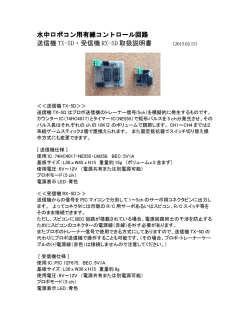
RBIO−5P シリアル・サーボモータコントローラ 取り扱い説明書 ■概要 概要 本基板は、18 個のサーボモータをコントロールする制御基板です。制御には、パソ コンなどの RS-232C ポートを使用します。 本基板のコントロールにはワンチップ CPU(PIC16F876)を使用し、ASCII 文字で構成 された指令を、サーボモータのポジションパルスに変換します。 ■特徴 特徴 ・サーボモータ個々のポジションで位置校正が行えます。 各サーボで、指示に対する、回転位置を同一に校正する事ができます。 ・多サーボが必要な場合、マルチボード構成が可能です。 ・制御命令に一般的な文字列を使用します。 ・インターフェースは一般的なシリアル信号です。 ■仕様 仕様 電源:ロジック用 4.8V ∼ 7.2V 標準 5V :サーボモータ用 標準 4.8V または 6V サーボモータの定格による。 電流:ロジック用 12mA RS232C コネクタ , サーボモータ未接続時 :サーボモータ用 使用サーボの消費電流による(最大 10A まで対応) シリアル I/F:RS-232C レベル /9600bps/8bit/ パリティー無し /9pin オス DCE 結線 出力:サーボモータ用 3P コネクタ 18 組 その他:マルチボード接続用のシリアル信号送りコネクタ付き ■必要な機器 必要な機器 本ボードを動作(確認動作)させるのに必要な機材は以下の通りです。 ●サーボモータ ●ロジック用電源 5V 程度の電源をご用意ください。 ●サーボモータ用電源 一般的なサーボモータは、4 . 8 V (N i c d 電池 4 本)を標準にしています。 4.8V タイプのサーボモータでは Nicd 電池を用いるか、5V 出力のスイッチング電源 をご用意下さい。 条件に拠っては、ロジック用電源を、サーボモータ用電源と共用できます。 ● COM ポートが実装された Windows マシン(又は USB-COM 変換アダプタ) ● COM ポート接続用 9P メス <>9P メス、ストレートタイプのケーブル *注意:本基板はスイッチング電源以外に、6V の鉛バッテリーや Nicd 電池で動作可 能です。しかし、バッテリーの様な供給能力の大きい電源から供給する場合 は、短絡事故等で火災になる場合がありますので、必ず途中にヒューズを挿 入してご利用ください。 (ver1.2) 目次 ■ 概要 ........................................................ 1 ■ 特徴 ........................................................ 1 ■ 仕様 ........................................................ 1 ■必要な機器 .................................................. 1 ■必要な機器の詳細 ............................................ 3 ■接続 ........................................................ 4 ■制御体系とサーボの制御について .............................. 7 ■動作モード .................................................. 8 ■オペレーション .............................................. 8 ■設定 ........................................................ 9 ■コマンド説明 ................................................ 9 ●サーボポジションのコントロール ............................. 10 ●動作の指定 ................................................. 11 ●ブロック転送 ............................................... 11 ●問い合わせコマンド ......................................... 12 ●パラメータ変更命令 ......................................... 13 ■特殊状態 ................................................... 14 EEPROM の内容割り当て ......................................... 16 ■コマンド一覧 ............................................... 18 ■必要な機器の詳細 ボモータで、 50Wタイプのスイッチング電源が欲 本ボードを動作させるために必要な機材に付い しいところです) ての捕捉。 ●サーボモータ サーボモータのサイズは特に問いませんが、本 ボードで供給可能なサーボモータ用電源は、最 大 10A を想定しています。一般に大型のモータ ほど消費電流が大きくなります。 ●ロジック用電源 5V程度の電源をご用意ください。 最低電圧は 4.8V、最大電圧は7.2V です。トラン ス式のACアダプタより、安定化されたスイッチ ング式の 5V 出力 AC アダプタをお勧めします。 また、サーボモータの電源と共通にする事も可 能で、この場合は、サーボモータ用電源からロ ジック用電源を供給します。 ●サーボモータ用電源 一般的なサーボモータは、4.8V(Nicd 電池4 本) を標準にしています。 4.8VタイプのサーボモータではNicd電池を用い るか、 5V出力のスイッチング電源を用いるのが、 適当です。 なお、サーボモータは、負荷状態により、かな りの電流を消費します。 18 出力全てにサーボモータを実装する場合は、 5V電源に余裕を見込んでください(小型のサー *注意 電源が、ロジック用とサーボモータ用に分かれ ています。 両者の電源は4.8V(または6V用)を用いる場合、 電圧範囲が同じため、 共通にする事が可能です。 しかしながら、サーボモータの消費電力が大き いため、重い負荷を駆動した場合、サーボモー タ用電源の電圧が低下する事があります。 多くのサーボでは、電源電圧の低下は、単に移 動速度の低下になるだけですが、共通に本ボー ドのロジック部電源を供給している場合、電圧 低下はCPUの暴走を引き起こす恐れがあります。 実験中や、ポジション確認、姿勢データの作成 中は、なるべく、ロジック電源は別供給してく ださい。 ●制御用コンピュータ 添付のCD内にポジション決定用のプログラムを 収録しています。 このプログラムを使用する場合は Windows が正 常に稼動するDOS/Vマシンをご用意ください。 制御ソフト(動作指令データの生成)を他の機 器で行う場合は、この限りではありません。 基本的に本器は、シリアルを制御可能なコン 図1 ピュータ(場合によっては PDA)であれば、コン トロールできます。 (動作確認と動作保障はWindowsマシンとさせて 3本とも、サーボモータ電源に接続してくださ い。 なお、想定している最大電流は 10A です。 頂きます。これ以外での制御は、ご利用者の責 任でお願いします) これを超える消費電力を持つサーボモータ(の 総消費)を利用する場合は、接続個数を少なく ●シリアルケーブル Windows(DOS/V)マシンに接続する場合は、9Pの して、本ボードを複数枚数を利用する等の処置 を行ってください。 ストレートメス <-> メスタイプをご用意くださ い。 サーボモータの電源はロジック電源に供給する 事もできます。 ■接続 この場合は、ロジック電源端子に電源を接続す る必要はありません。 ●ロジック電源 ロジック電源を接続する端子を二種類装備して います。 逆にロジック電源に接続したACアダプタ端子か ら、サーボモータに電源を供給する事もできま す。 サーボモータの電源からロジック用電源も供給 する場合は、ロジック用電源の接続は必要あり ません。次項のサーボモータ電源を参照してく ださい。 図 1(A)は、AC アダプタ用、2.1 φのセンター プラスのプラグを持ったACアダプタを接続する ためのコネクタです。 2.1 φプラグが付いたAC アダプタを利用する場 合は、こちらに接続してください。 数個のサーボモータを利用する場合は、この端 サーボ用電源コネクタ 子から、ロジック用とサーボモータ用の電源を 供給する事ができます。 (後述のサーボモータ電 源の項を参照) この端子からサーボモータにも給電する場合は、 最大 3A 程度を目安にしてください。 一方、 (B)の端子は、電線を利用してロジック 電源を供給する端子です。基板のスルーホール 穴にハンダ付けで接続します。 この端子から供給した電源もサーボモータに給 電可能ですが、設計上、大電流を想定していな いため、動作が不安定になる恐れがあります。 ●サーボモータ電源 付属の 6Pケーブルの先端を図 1(C)のコネクタ に接続してください。 6本の電線の内、黒3 本を束ねて、サーボモータ 電源のマイナス(-)に、赤 3 本を束ねて、サーボ モータ電源のプラス(+)の端子に接続します。 サーボモータはかなり消費電流が大きく、この コネクタにも、その電流が流れます。 コネクタの+、−それぞれに3本の電線を用意 しているのは、 この電流に耐えるためですので、 サーボ用電源の電線は3本を束ねて、接続して ください。 **注意** 本基板には、ロジック用とサーボ用の各電源を 共通にしたり、分離したりする、ジャンパーJP1 を備えています。 ロジック電源、サーボモータ電源を分離して供 給(標準の接続状態)している場合に、両者の 電源をこのジャンパーで接続してしまうと、ロ ジック用か、サーボモータ用のどちらかの電源 を壊してしまう恐れがあります。 また、両者の電源の供給能力が異常に大きい場 合、過電流で基板を破損させてしまう恐れがあ ります。 別々に電源を供給する場合は、必ず、J1 のジャ ンパーピンをX側に挿入して下さい。 サーボの接続 ●シリアル信号とジャンパー 一枚目または単独使用 RBIO-5Pは複数枚での使用が可能な様、 シリアル 信号を次の基板に送るためのコネクタを持って います。 シリアル信号は一枚目の基板の9Pコネクタ(図 1 の 232C コネクタ)に接続します。 ジャンパー JP2 と JP3 を下図の様に I と X 間が ショートする様に挿入します(出荷時はこの設 定になっています) ●サーボモータ サーボモータはCN1 (3個並びのピンが18組立っ ているコネクタ)の各 3 本が一つのサーボを担 当します。 コネクタ横の番号はサーボの番号を表します。 コネクタ端のC+−はそれぞれ、サーボのコン トロール信号、電源+、電源−を表しています。 サーボのコネクタには、極性があります。 写真はGWS社製のサーボですが、他社でも信 号名を合わせて挿入してください。 ただし、信号の並びがコントロール、電源+、電 源−またはこの逆でないと接続する事はできま せん。 単独での使用時のシリアル選択ジャ ンパー (I と X 間にプラグを挿入) 複数枚の使用 さらに、基板を追加する場合は一枚目と同じく、 二枚目以降の信号は、9P コネクタではなく、付 属の 2P ケーブルで基板間を結線します。 Y端子に2Pケーブルを挿入して、次の基板のX端 子に接続します。 下図の様に、一枚目のJP2、JP3のY側端子(ジャ ンパーが刺さっていない側)に付属の緑黄 2 P 以後、追加基板がある度に同様の接続をしてく ださい。 (左の図の下側) ケーブルを挿入します。 接続はJP2に黄色の電線、JP3に緑色電線が来る 追加基板は、各基板で番号を変更する必要があ ります。 様に挿入してください。 2枚目以降の基板は、JP2、JP3 のジャンパー 出荷時の基板番号は 0 番になっています。追加 基板は 0 以外の番号で、他の追加基板と重複し (ショートピン)を除去し、一つ前の基板からの 接続した 2Pケーブルを下図の様に、JP2、JP3 の ない番号を設定してください。 設定の方法は、特殊モードの、基板番号設定を X端子に挿入してください。 参照してください。 *複数枚数の基板を接続する場合の注意 複数枚数の基板を接続した際の 2P ケーブルは、 シリアル信号の送信と受信の信号を接続します。 しかしながら互いの基板で、信号の基準となる GND(ロジック用電源のグランド又はマイナス 側)が接続されている事を前提としています。 例えば、一枚目をACアダプタ1で、二枚目をAC アダプタ2で別々に供給した様な場合は、互い の GND が別々になってしまい、シリアル信号を 一枚目から二枚目に伝える事ができなくなりま す。 この例の様な場合は、二枚の基板のロジック電 源のマイナス側を互いに接続してください。 (下図の様なイメージになります) (次の基板への送り出しコネクタを接続する) CN5 CN4 CN5 CN4 +- RBIO-5P RBIO-5P 複数枚設置時の一枚目 +- ACアダプタ ACアダプタ (又は電池) (又は電池) ロジック電源が各基板で独立してい るいる場合は、マイナス間を接続す (最終の基板は次への送り出しは無し) る(点線の配線を追加する) 複数枚設置時の二枚目以降 また、サーボ電源とロジック電源を共通接続と ■制御体系とサーボの制御について している場合ですが、サーボモータの消費電流 が大きい関係で、モータ動作時に電線上で電圧 サーボモータは、 位置制御パルスを受信して、 出 降下が発生します。 この電圧降下が、相互接続している2Pケーブル の信号を妨害する恐れがあります。 複数枚数を一個の電源から供給する場合は、下 図の様に、付属の6P電源供給ケーブルを短い目 に切断して共通接続した後、太い電線で電源に 接続してください。 RBIO-5P RBIO-5P CN5 CN4 CN5 CN4 +- +- 力軸がパルスが示す位置になるまで、モータを 回転させる機構を持った一種の自動制御装置で す。 位置信号に比例した位置に移動できるため、 サーボモータはプロポと呼ばれる場合もありま す。 定格負荷以内で使用した場合は、制御パルスが 示す位置に、出力軸が自動的に移動します。 サーボモータは、普通のギアモータの様に、正 転、逆転の回転方向と速度を制御する概念はな く、移動させたい角度(位置)を指定して利用 します。 一般に、ギアモータでは、何らかの位置検出機 構がないと、回転角(や位置)が判りません。さ らに、指定の位置に移動させ、停止させる作業 は、使用者が行う事になります。 それに比べ、サーボモータは、位置信号さえ与 えれば、その位置に自ら移動するため、コント ロールが容易に行える利点があります。 とは言え、サーボモータを使用する場合、制御 赤色の電線 黒色の電線 サーボモータ ロジック 共用電源 特に、黒線(マイナス側)の3本が 長くならないよう、互いの基板の電 線を束ねてください。 パルス(位置指定信号)を常に送り出す必要が あります。 一般に、この様なパルスを作成する作業はWindows マシンの様な高級な OS を持った PC では難 しいため、サーボモータのコントロールは、専 用のボードを用いる事になります。 本ボードはこの様なコントロールボードの一種 で、 Windowsの様なアプリケーションレベルの命 令を受信して、サーボの位置信号に変換する作 業を行います。 サーボモータは、位置パルスを与える事で、指 定位置に移動する訳ですが、この位置制御パル スは、形式は共通ですが、メーカ間で微妙に制 御される位置が異なります。 複数接続時の最大枚数ですが、論理的には10枚 また同じメーカでも、シリーズが異なる場合も 少しづつ異なりますが、同じ形式のモータでも、 のボードを制御可能です。 しかしながら、サーボモータの消費電流による 微妙に異なっています。 本ボードでは、同じ制御位置指令 (移動命令) で、 影響が、一義的に決定できないため、使用時に 該当装置での実験を行なって正常動作する事を 同じ結果が得られる様、個々のサーボモータの 最小、最大位置を予め登録する様になっていま 確認して頂く必要があります。 す。 登録情報には、通常使用での最小位置と最大位 置、リセットした際にサーボが位置するホーム ポジションがあります。 ■オペレーション この内、最小位置と最大位置をサーボの移動可 能範囲内に設定しておけば、異常な範囲に移動 ●電源 させてしまう様な事がありません。 一般にサーボモータの制御可能な回転角度は 180 度、移動可能な範囲は、だいたい 270 度程度 になっています。 本ボードの制御命令は、この登録された、最小 範囲から最大範囲を 100 等分(% 用)又は 180 等 分(角度指定用)して利用します。 常に、分割した相対位置で指定できるため、最 小、最大を同じ位置にセットしておけば、一度 作成した制御データが、サーボモータの交換や、 違う個体にも適用できます。 上記の移動範囲を制限した命令以外に、位置パ ルスを、受信した通りに出力する命令がありま す。この命令は、自分の管理下でサーボを動か す場合や、最小、最大の移動範囲を指定する際 に使用します。 通常のサーボでは、自己の移動可能範囲外に出 てしまう様な指令を受け取った場合でも、その ポジションに移動させようと動作 (モータ駆動) を継続させます。 機械的に制限された、移動不可能なポジション に移動しようとした場合、モータに通電された ままとなってしまい、モータの発熱、電源電流 の増加、ギア破損等の問題が発生する可能性が あります。 全ての範囲に移動する命令を使用する際はご注 本ボードには電源スイッチがありませんので、 ACアダプタや電池で電力が供給された時点から 動作を開始します。 ●ステータス表示 通常モード(単に電源を入れる)では、緑色ま たは赤色のランプのどちらかが点灯します。 点灯するランプの違いは、受信するコマンドの 成否を表しています。 緑色(OK と表示されている)が点灯している場 合は、直前に受信(または実行)したコマンド が正常であった事を表しています。 一方赤色(NG と表示されている)が点灯してい る場合は、直前のコマンドにエラーが含まれて おり、実行を中断した事を表します。 ● EMG.STOP ボタン 主に非常停止に使用する押しボタンです。 コマンドを送った際、予定外の位置にサーボが 移動してしまった等の緊急にサーボを停止させ たい場合に使用します。 ボタンを押す事でサーボが停止し、フリーにな ります(この機能を無効にする事もできます) 緊急停止した場合は、緑色ランプが点滅表示に なります。 解除はEMG.STOPボタンを数秒間押し続ける(長 押しを行う)と、緑色ランプの点滅が停止し連 続点灯になりますので、この時点でボタンを離 意ください。 してください。 ボタンを離した瞬間から、サーボの動作が再開 ■動作モード します。 またEMG.STOPボタンを押した際、コントロール ●通常モード:通常の動作を行うモードです。 普通に電源を入れた場合に通常モードになりま している PC に対して、次のメッセージ(グリー ティングメッセージ)を送出します。 す。 通常モードでは、緑色ランプが最初に点灯しま 「RBIO-5 Servo motor controller Ver1.0」 Ver1.0 は、バージョンに合わせて変化します」 す。 ●特殊モード:動作に必要なパラメータの設定 このメッセージの送出を、禁止する事もできま す。 を行うモードです。 EMG.STOPボタンを押したまま電源を入れる事で EMG.STOP ボタンはエラー表示(赤色ランプ)を クリアします。 この特殊モードになります。 特殊モードでは、緑色と赤色のランプが同時に 点灯します。 特殊モードを終了させるには、電源を切断しま す。 ■設定 ●コントロール考え方 電源の項目にもありますが、ロジック電源と 本ボードのサーボコントロールは、シリアル通 信による ASCII文字を使用して行われます。 サーボ電源の間を接続するジャンパーは正しく 挿入してください。 JP1 電源ジャンパー 共通接続 Sの側にプラグを挿入 個別接続 Xの側にプラグを挿入 単一ボードの使用で、取り合えずの動作確認で は、出荷状態のままで使用できます。複数枚を 接続している場合は、最低限、ボード番号の設 定が必要となります。 出荷時のサーボポジションの最小、 最大値はGWS 社のサーボが 180 度程度稼動する範囲に、ホー ムは中央に設定されています。 これらの値は実際にサーボを組み込んだ後、設 定ソフト「*****」を使用するか、Z コマン ドを利用して、 実情に合わせる必要があります。 ****の使い方はソフトに収録されているマ ニュアルを参照してください。 通常状態での制御の流れは、 1:コントロールコマンドを発行する。 2:結果を受信する。 この1と2を交互に繰り返して、サーボをコン トロールします。 設定により項目2の、結果報告を行わない運用 も可能です。 これにより、無線リモコンの様な、送信のみの 一方通行の伝送系でも使用可能です(位置制御 系コマンド以外は使用できなくなります) 本ボードには、通常状態以外に、 基板にパラメー タを設定する特殊モードがあります。 この場合の制御の流れは、 1:特殊コントロールコマンドを発行する。 2:結果を受信する。 と、通常状態と同じですが、コマンドの書式が 異なります。 また、結果を受信する事が必須のため、双方向 に通信可能な状態である必要があります。 ■コマンド説明 ・コントロールコマンドの体系 コントロールコマンドは、ASCII コードのアル 以下のコマンド説明には G や P の大文字と、b や subの小文字があります。 ファベット1文字で識別します。 使用しているコマンド文字は、GHPQRXYZ です。 便宜上コマンドやサブコマンドの通信時に送る 文字を大文字のアルファベットで、パラメータ 同じ働きをするコマンドが異なるコマンドに存 在する場合もあります。 を示す記号として、小文字のアルファベットを 使用します。 上記コマンドの内、Zコマンドだけは、特殊モー ドでのみ使用します。 例えば、サーボのポジションを指示する命令 Pb,cnnn,cnnn,cnnn... 通常状態で Z コマンドを送った場合は、全て無 視されます(先頭がZで始まった場合、コマンド で、先頭の P が命令、b と c と nnn がパラメータ になります。 に対するエラーも出ません) コマンドは文字 GHPQRXY の何れかで開始(一番 大文字の(例では P)はその文字を命令として、 送信しますが、 小文字で表記したパラメータは、 先頭に送信する)します。 コマンドに続き、操作対象になるボードの番号 適時必要な文字を入れて送る必要があります。 例としてボード番号 2 番、サーボ番号1と3の 0 ∼ 9 を送ります。0 番ボードに限り、数字 0 を 省略可能です。 位置指定を 50% にする場合は P2,150,350 次に「,」カンマを送ります。 ここまでの命令の構成は上記 GHPQRXY のコマン となります。 なお、命令文字は説明上、大文字で記載してい ドで共通です。 続けて、パラメータを送ります。 ますが、小文字を使っても動作します。 コマンドの種類で、パラメータの個数と、書式 が異なります。 最終にリターンコード(0x0d)を送ります。 注:命令の最後のリターンコードを忘れないで 位置に移動します。 ください。本ボードはリターンを受信した時点 で命令の実行を開始します。 最小ポジションは0、最大ポジションは255 になります。 本ボードでは一枚の基板で18個のサーボを接続 この形式を絶対位置形式またはアブソリュート 形式と呼ぶ事にします。 できます。 サーボのチャンネル番号(chと記入している場 P、R、Xの各コマンドには、サーボ番号1桁と位 合もあります)を表すのに1文字の ASCII コー ドを使用します。 置を示す数値のペアを複数記述する事ができま す。この場合は、各指定の間を「,」 (カンマ)で サーボ0∼9 数字の「0」∼「9」 サーボ10 文字の「A」 区切ります。 P、R、Xの各コマンドの位置指定数値の数値有効 サーボ11 文字の「B」 サーボ12 文字の「C」 桁数は3桁ですが、最大文字数を3文字として 処理していますので、指定は3文字以内として サーボ13 文字の「D」 サーボ14 文字の「E」 ください。 なお、サーボ番号1文字が付きますので、ひと サーボ15 文字の「F」 サーボ16 文字の「(」左かっこ つのサーボの位置を指定する文字(文字列)は、 最大 4 桁となります。 サーボ17 文字の「)」右かっこ *サーボ番号が 0 から付けられているのご注意 ch5 のサーボを位置 0 に指定する数値の例 ○: 「50」 、 「500」 、 「5000」 ください ×: 「50000」位置の指定が 4 文字ある、 「5 0」数 値の頭が空白、 「5+0」記号がある サーボのch番号は1文字とするために特殊な文 字を使用していますが、それ以外の数値は、コ 同様に 15 を例にすると ○: 「515」 、 「5015」 マンド S と Z を除き、10進数(普通の数値)で す。 ×: 「50015」位置の指定が 4 文字ある、 「5 15」 頭が空白、 「5+15」記号がある ●サーボポジションのコントロール 指定位置の数値例 ボード番号2番のサーボ0と4と7と15を、 コマンド文字、P、R、X 指定ボードの指定サーボを指定ポジションに移 動させます。 Pb,cnnn,cnnn,cnnn... 指定 パーセントでの Rb,cnnn,cnnn,cnnn... Xb,cnnn,cnnn,cnnn... 角度での指定 全範囲の指定 ここで、bはボード番号0∼9、cはサーボのチャ ンネル番号、nnnはポジションの指定数値です。 Pコマンド:最小と最大の区間をパーセントで分 割した位置に移動します。 最小ポジションは0、最大ポジションは100 になります。 Rコマンド:最小と最大の区間を180度として角 度分割した位置に移動します。 最小ポジションは0、最大ポジションは180 になります。 X コマンド:すべての区間を 0 ∼ 255 に分割した P コマンド(パーセントでの指定)を使って、 10%,30%,100%,17%に移動させる。 P2,010,430,7100,F17 数値を省略すると 0 と判断されます。 次の様な文字列を送った場合、 R, R0,00 と解釈されます。 これは角度指定コマンドで、ボード 0 のサーボ 番号 0 の角度を 0 度に移動させる命令になりま す。 例えば、R,,,,,と指定した場合も有効な命令で す。 この場合の解釈は、 R0,00,00,00,00,00 となり、ボード 0のサーボ番号0の角度を0度に 移動させる命令を5回、多重に発行した事にな りますが、これも有効です。 同様に、ボード番号 0 の全てのサーボを最小に があります。 移動させる命令を記述する場合、通常なら P0,00,10,20,30,40,50,60,70,80,90,A0,B0,C0,D0,E0,F0, ・ホーム移動 Hb,n (0,)0 となりますが、 ここで、b はボード番号で、0 ∼ 9 と A が指定で きます。n は制御数値です。 P,0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F,(,) でも同様の結果となります。 基板上のコントローラに、予め記録されている ホームポジションまたは最小位置に復帰(移動) (この様な、 全てのサーボをまとめて指定する場 合は最大文字数に注意してください させるコマンドです。 ホームポジション及び、最小位置は、書き換え 本ボードで一度に受け入れ可能な命令文字数は 63 文字までです) る事ができます。 (出荷時の最小位置は、メーカ *1が公表している制御範囲の最小位置に、ホー Xコマンドで指定する場合の注意 ムポジションは制御範囲の中間位置になってい ます) P及びRコマンドと異なり、Xコマンドでは、サー ボに対して指定する数値が制御可能な範囲を超 n=0:ホーム復帰:予め設定されているホームポ ジションに移動する。 えてしまう可能性があります。 P 及び R では、予め設定した、開始点(最小ポジ n=1: 最小移動:予め設定されている最小ポジ ションに移動する。 ション)から終了点(最大ポジション)の間を 等分した位置に移動します。 n=2:ホームシャットオフ:予め設定されている ホームポジションをセットし、サーボを停止に 一方Xでは、 移動可能であろう範囲 (これは、 サー ボによって異なり、同一のサーボ型番でも異 する。 n=3:最小シャットオフ:予め設定されている最 なっている可能性がある)に対して、移動を要 求します。 小ポジションをセットし、 サーボを停止にする。 n=4 ∼ 9は無視しますが、将来、利用する可能性 この場合 0(最も最小な位置)や 255(最も最大 な位置)は、サーボの移動範囲を超えている可 があります。 なお n=2 と 3 での実際の動作としては、移動先 能性があります。 開始点や終了点の決定、可動範囲を見るための (ホームか最小) を設定した瞬間に動作が停止し ます(G コマンドで 0 を指定したのと同じ) 試験等で、この様な数値を送る場合、サーボが 端点にぶつかっていないか細心の注意を払って しかしながら、内部には、次の動作再開時に移 動してほしいポジションがセットされるところ 実行してください。 が、と異なります。 Hコマンドの2と3で停止した場合の再開はGコ ●動作の指定 マンドで数値に 1 を指定して行います。 コマンド文字、G、H ・動作/停止 Gb,n ここで、b はボード番号 0 ∼ 9 と A が指定できま す。n は制御数値です。 G コマンドは、同一ボード上の全サーボの停止 (フリーになる)及び、動作をコントロールしま す。 *ボード選択数値について HとGコマンドに限り、ボード選択用数値として 0 ∼ 9 に加え、A が指定できます。 Aを指定した場合、全てのボードが、この G及び Hの命令を受け取ります。 ●ブロック転送 コマンド文字、S なお、ボードの構成上、サーボ個別での動作、停 止を行う事はできません。 コマンドの必要性は、この項目の最後を参照し てください。 n=0 では、サーボの動作を停止します。 n=1 では、サーボの動作を開始します。 ・サーボポジションのブロック指定 Sb,P,c0c1c2c3...c17 パーセントでの n=2 ∼ 9 は無視しますが、将来、利用する可能性 ブロック指定 Sb,R,c0c1c2c3...c17 角度でのブロッ ク指定 ポジションをブロックで報告 Sb,X,c0c1c2c3...c17 ク指定 全範囲のブロッ をブロックで報告 Sb,QN 記録されているサーボのホームポジ ここで、b はボード番号 0 ∼ 9、c0 や c1 はサー ボの位置指定の数値で16進数2桁固定です。 ションをパーセントに換算してブロックで報告 Sb,QM 記録されているサーボのホームポジ サーボの ch 番号を指定する数値は無く、パラ メータの先頭から最初の2文字がch0、 次の2文 ションを角度に換算してブロックで報告 ここで、b はボード番号 0 ∼ 9 です。 字が ch1、と並び、パラメータの 37 文字目と 38 文字目がサーボのch17を固定的に表します。 結果はコマンド文字の後ろに","と18ch分の数 値(各 ch の数値は 16進数 2 桁の固定)として 36 (16 進数は、巻末の?を参照してください。 ) 数値は2文字の固定ですので、例えば0Eの様な 上位桁が0になる様な数値でも、0を省略できま せん。 一方、サーボ18個の全てを指定する必要が無い 場合は、後ろの指定を省略する事ができます。 (前方を省略する事はできません) また、変更したくないサーボに対しては、数値 の代わりに --(マイナスを2個)を指定する事 で、その ch の指定は無視されます。 個の文字が並びます。 例1:出荷時状態での開始点を報告させる 指令 S1,QB 結果 S1,QB,141414141414141414141414141414141414 例2:ブロック指定の例1を実行した後で問い 合わせを実行 指令 S1,QP 結果 命令の区別のP とRとX ですが、通常コマンドの P、R、X と同じく、P は数値をパーセント(00 ∼ S1,QP,000102030405060708090A0B0C0D0E0F1011 64)として、R は角度(00 ∼ B4)として、X は全 範囲(00 ∼ FF)を指定します。 注意:範囲指定の数値は16進数です。00 ∼ 64 は16進数での表記で、十進では0∼100になり 範囲の考え方は、P、R、X のコマンドを参照して ください。 ます。同様に 00 ∼ B4 は 0 ∼ 180、00 ∼ FF は 0 ∼ 255 を表しています。 例1:ボード番号1の全サーボに付いて、パー セント指定でch0に0%、ch1に1%...最終のch17 ブロック転送命令では、パラメータの数値が1 6進数を使用している事に注意してください。 に 17% の位置情報をブロック指定する S1,P,000102030405060708090A0B0C0D0E0F1011 ・ブロック転送が必要となる場合 例2:ボード番号1の ch4 を除く残りのサーボ に付いて、角度指定で 90 度にセット 本基板のコマンド転送は、シリアル通信で 9600bps で行われます。 S1,R,5A5A5A5A--5A5A5A5A5A5A5A5A5A5A5A5A5A この場合の転送速度は秒当たり 960 文字になり ます。 ・ブロック読み出し Sb,QP パーセントとしてサーボ位置を 0.1秒刻みでサーボに指令を送るとすると、 96文 字以内の命令数しか許されない計算になります。 ブロックで報告 Sb,QR 角度としてサーボ位置をブロッ 18 個のサーボ全てに付いて、P コマンドの様な 命令を送信するとすると、転送速度がぎりぎり クで報告 Sb,QX 全範囲としてサーボ位置をブ になります。 全てのサーボに対して、指令を頻繁に送信する 記録されているサーボの開始点 様な場合に使用するのが、ブロック転送命令で す。 をブロックで報告 Sb,QE 記録されているサーボの終了点 ブロック転送では、18個のサーボモータの位置 指令を 42 文字で一括送信できます。 をブロックで報告 Sb,QH 記録されているサーボのホーム ●問い合わせコマンド ロックで報告 Sb,QB コマンド文字、Q Qb,sub 中は、指令位置と実際の位置が異なります。 ここで、b はボード番号 0 ∼ 9、sub はサブコマ ンドを持つパラメータで、問い合わせの内容に 定格を超える負荷:サーボの出力定格を無視し て、重い負荷を動かした場合、モータが回転で より変化します。 sub の内容としてサブコマンド P、R、X、にサー きずに、指令位置に移動できない場合がありま す。 ボ番号または、Y 一文字を付けます。 Qb,P,ccccc... パーセント形式でポジション ・サブコマンド Y 制御ソフトを製作する際にボードが存在するか、 を報告 Qb,R,ccccc... 動作パラメータの設定がどの様にされているか を確認する問い合わせです。 Qb,X,ccccc... 告 角度形式でポジションを報告 全範囲形式でポジションを報 返答として、 Qb,Y,xxyyzz,ver Qb,Y:動作モードの報告 ・コマンド Q のサブコマンド P、R、X ここで、bはボード番号、xxyyzzは動作パラメー タの記録内容、ver はバージョン文字列です。 c は問い合わせるサーボのチャンネル番号を表 す文字(1サーボに付き1文字)です。 実際にはこんな感じの文字列になります(ボー ド1番に対して問い合わせを行う事にします) 一行の文字数制限(コマンド文字 63 文字)まで なら、複数の問い合わせを記述する事ができま 送信:Q1,Y 応答:Q1,Y,8D0002,V1.0 す。 またサーボ番号の指定に順番はありません。 結果の報告は Q?,x(?はボード番号、x は P また 動作パラメータが8D0002となっていますが、2 桁で区切って8D 00 02の3組として扱います。 は R または X の指定形式)の後に ",cppp,cppp,...."が続きます。 次のV1.0がコントロールソフトのバージョンで す。文字列の長さは、例では4文字ですが、バー なお、c はサーボ番号、ppp はポジションで、頭 が 0 で始まる場合は 0 が削除されます。 ジョンによっては長くなる場合があります。 動作パラメータの内容ですが、Z命令の一部と同 (一桁の 0 はそのまま) *注意1:ポジションの指定に X コマンドを使 じです。詳細は Z コマンドを参照して頂き、EEROM の内容の項目で、4 番地、5番地、6 番地の項 用した場合、予め設定している、開始点(最小 位置)より下や、終了点(最大位置)より上が 目を参照してください。 指定できます。 この様な、分割範囲を超える状態でP(パーセン EE-ROM の内容中、該当分に付いては、Z コマン ドの説明内に、QコマンドのYサブコマンドの返 ト形式)及びR(角度形式)の数値を要求した場 合、0 より小さい場合は 0 を、P の場合で 100% 超 答内容として記載していますので、そちらを参 照してください。 える場合は100を、Rで180度を超える場合は180 を報告します。 注意:同じ基板番号にセットした複数のボード がある場合、 そのボードに対する問い合わせが、 *注意2:ポジションの報告は、本基板がサー ボに対して出力している位置情報をPC側に返送 無応答であったり、変な文字列として返ってく る場合があります。 するものです。 通常の動作状態のサーボでは、位置指令=実際 これは、同じ基板番号のボードが同時に返答を 返すため、送信線が混線して、正常に送信でき の位置になりますので問題はありませんが、あ くまで、この位置に制御したいとの情報が読み ないために、発生する現象です。 基板番号の設定を行い、基板番号のダブリを解 出されるだけで、重負荷等で制御位置以外で停 止している場合でも、正常な制御位置が報告さ 消させると、正常になります。 なお、 基板番号を同じにして混線が起こっても、 れます。 結果として、次の様な場合は指令位置と実際の 基板が破損する事はありません。 位置が異なります。 移動中の場合:指令した位置に移動している途 ●パラメータ変更命令 本ボードでは、特殊状態(14 ページ参照)で Z 命令を使って、 パラメータの変更を行いますが、 X 命令を使っても同じ操作が行えますが、B、E、 最小ポジション、最大ポジション、ホームポジ ションは、通常の動作状態でも、行う事ができ Hの各コマンドと、 統一性を持たせるために用意 しました。 ます。 ただし、これらのパラメータを不用意に変更し 設定内容は、コントローラ内部の EEROM と呼ば れるエリアに記録され、電源を切断しても保持 た場合、範囲外への移動等が発生してサーボを 破損する恐れがあるため、この命令自体の動作 されます。 EEROMの書き込みに際しては、 普通の論理素子に を、 許可/禁止に設定できる様になっています。 許可されているか、禁止状態かは、Q 命令の Y サ 比べて、比較的時間がかかります。 現実の書き込み時間として一つの位置情報に ブコマンドを使って得られる応答から知る事が できます。 15mS ∼ 20mS(1000 分の 15 秒∼ 1000 分の 20 秒) まとめて、指定した場合は、それだけの個数分、 内容は、Z 命令の EE-ROM 内容を参照してくださ い。 時間がかかります。 返送文字をOKを確認後、次の操作に移る事をお Yコマンドの受付が許可されている場合、 コマン 勧めします。 なお、返送指定(OK や ERROR の文字)を切って ドの形式は他のコマンドと同様になります。 Yb,B,cnnn,cnnn,cnnn... 最小位置を いる場合は、少し長い目の時間を取った後、次 の操作に移ってください。 記録する Yb,E,cnnn,cnnn,cnnn... 最大位置を ■特殊状態 記録する Yb,H,cnnn,cnnn,cnnn... ホーム位置 を記録する Yb,X,cnnn,cnnn,cnnn... 指定の位置 にサーボを移動させる ここで、bはボード番号0∼9、cはサーボのチャ ンネル番号、nnnはポジションの指定数値です。 数値nnnは0∼255の絶対位置で表すサーボのポ ジションです。 Yb,Bが開始点(最小位置)を、Yb,Eが終了点(最 大位置)を、Yb,H がホームポジションをそれぞ れ設定します。 設定が、開始点(最小位置)>= 終了点(最大位 置)にセットすると、コントローラ内部で計算 ができなくなり、 動作できなくなりますので、 必 ず、開始点(最小位置)< 終了点(最大位置)と なる様にしてください。 本基板では、 開始点と終了点の妥当性は、 チェッ クしていません。 また、位置制御の際に、開始点から終了点の区 間を等分する計算を行います。 開始点と終了点の値が近いと、計算精度が荒く なりますので、通常は 180 度程度の回転角を目 安にしてください。 Yb,X,cnnn,cnnn,cnnn... は、設定コマンドで はなく、サーボポジションを移動させる命令で す。 ボードの動作パラメータを設定するモードです。 複数のボードを接続する場合の2枚目以降には、 必ず基板番号の設定が必要ですが、この設定も 特殊状態を使って行います。 ●通常モードの Q コマンドに付いて 通常状態で動作する問い合わせコマンド Q のサ ブコマンド Y の応答は、本項で説明する EEPROM の内容を含んでいます。 このコマンド Qb,Y(動作モードの報告)の返送 結果、Qb,Y,xxyyzz,ver の xx,yy,zz の各部分の 内容は Zコマンドのアドレス割り当て表で、 xx:04H 番地 yy:05H 番地 ZZ:06H 番地 を参照してください。 ●特殊状態とは 通常の動作状態と異なり、動作に必要なパラ メータを設定するモードです。 設定内容はコントローラに書き込まれ、電源を 切断しても、保持されます。 特殊状態では、複数のボードを区別する事がで きません。特殊状態にして、設定を受け付ける ボードは、一度に一枚としてください。複数枚 の設定が必要な場合は、一枚づつ、順に行って ください。 ●特殊状態にするには、解除するには Z コマンドの基本はコントローラ内部の EEPROM 特殊状態にしたいボードの電源を一度切断して ください。 電源が入っていない状態で、 EMG.STOP メモリと呼ばれるエリアの内容を書き換える事 です。 ボタンを押したまま、 電源を接続してください。 N G と O K の両方のランプが点灯した時点で、 このEEPROMメモリに記録されている内容に従っ て、ボードが動作しています。 EMG.STOPボタンを放してください。 特殊状態を終わらせる場合は電源を抜いて下さ また、サーボの位置確認が必要なため、サーボ のポジションを移動させるコマンドも用意して い(電源を切断する以外に、特殊状態を終了さ せる方法はありません) います。 Z コマンドを使用してパラメータを変更するに *マイコンのリセットをご理解頂ける方へ 特殊状態は、搭載しているマイコンの電源起動 は、16 進数の知識を必要とします。 Zコマンドでは、 通常のコマンド用の返送設定に (またはリセット起動)時に、押しボタンが押さ れているかを判断して実行しています。 は従わず、必ず結果が返送されます。 本ボードには、押しボタン横にG及びRと印刷さ れた端子があります。G は GND に、R はマイコン 'ZS'aann EEPROM メモリのアドレス aa に、内容 nn をセッ のリセットに接続されていますので、このGとR 間をピンセット等でショートさせる事でマイコ トする。 このコマンドは、成功した時点で 'OK' を、失敗 ンを電源入れたままリセットする事ができます。 この方法を使うと、電源を入れたままでも、特 またはエラーの場合に 'NG'を返送します。 殊状態にしたり、 解除したりする事ができます。 'ZQ'aa EE メモリのアドレス aa の値を返送する。 ●特殊状態で設定できる内容 ・動作関係 このコマンドは、正常な場合は 'OK' と次行に 'S'aann を、失敗またはエラーの場合に 'NG' を 基板番号、エラー時の応答文字を「NG」とする か「ERROR」とするか、OK等の結果を返送させな 返送します。 い、デバッグモードにする、Yコマンドの許可/ 禁止。 EMG.STOPボタンを押した際の、 グリーティ 'ZX'cpp 指定サーボのポジションを移動させます。 ングメッセージ送出の有無。 ・モータ関係 c にサーボの ch 番号、pp にポジションを指定し ます。 サーボの最小位置、最大位置、ホームポジショ ン。 サーボのch番号は、通常コマンドと同じ表記法 です(18ch を1文字で区別する) H コマンドの振る舞い。G コマンドの振る舞い。 EMG.STOPボタンの振る舞い。 ポジションは 16 進数 2 桁で指定します。 一桁しか数値が無い場合でも前の 0 は省略でき ません。必ず2桁の16進数で指定してください。 ●設定方法 設定には Z コマンドを使用します。 Zコマンドは、 特殊な動作状態で実行するコマン 10 進、16 進変換表(16 進 1 桁分) 10 進 16 進 10 進 16 進 ドですが、利用に際して、同時に接続されてい るボードを外す必要はありません(接続してい 0 0 1 る全ボードに電源を供給する必要はあります) 通常は、付属の動作モード設定ソフト「*** 2 *」を使用して内容を変更してください。 以下の説明は、ご自分で、直接書き換えたい(自 前で変更ソフトを製作する等)場合に参照くだ さい。 8 8 1 9 9 2 10 A 3 3 11 B 4 4 12 C 5 5 13 D 6 6 14 E 7 7 15 F EEPROM の内容割り当て 00H ∼ 02H の 3 バイトは未使用です。 書き換え試験等には、このアドレスをご利用く ださい。 03H EEPROM内容のバージョン番号 初期値:出荷バージョンによる EEPROMで設定できる項目のバージョン番号を示 す値で、上位4ビットが小数点以上、下4ビッ トが小数点以下を表します。 例:Ver1.0 なら 10H と記入されています。 注意:この値を書き換えないでください。 ボードの動作には、一切関係しませんが、付属 設定ソフト「p_init.exe」がこの値を参照する ため、動作が変わる可能性があります。 07H 電源 ON 時の動作モード 初期値:02H 電源 ON 直後のサーボモータの動作を指定しま す。 0:フリーモードで起動し、何らかのコマンドを 受信した直後から、サーボモータを駆動 1:フリーモードで起動するが、サーボモータの 動作開始には Gコマンドの送信が必要 2:ホームポジションに移動し通常動作 3:最小ポジションに移動し通常動作 08H ∼ 14H 未使用 初期値:不定 将来使用する可能性がありますので、値を記入 または変更しないでください。 04H ボード番号 下 4bitの数値 初期値:0 数値 0 ∼ 9 が指定できます。下の 4bit が有効で 15H サーボ ch0 のホームポジション すので、9 以上 0AH ∼ 0FH も登録できます。サー ボ操作命令では 9 を超えるボード番号は指定で 17H サーボ ch2 のホームポジション きません。 19H サーボ ch4 のホームポジション 05H 動作モード ビット割り当て 初期値:1DH (10001101B) 動作モードを指定します。 各ビットで1にした機能が有効になります。 16H サーボ ch1 のホームポジション 18H サーボ ch3 のホームポジション 1AH サーボ ch5 のホームポジション 1BH サーボ ch6 のホームポジション 1CH サーボ ch7 のホームポジション 1DH サーボ ch8 のホームポジション bit0:エラーの場合に "ERROR" を返送 bit1:エラーの場合に "NG" を返送 1EH サーボ ch9 のホームポジション 同時に ON の場合、bit0 が優先 (bit0,1=0,0の場合は正常、異常は返送しない) 20H サーボ ch11のホームポジション bit2:デッバグモードをON bit3:Yコマンドの受付可能 22H サーボ ch13のホームポジション bit4 ∼ bit6:未使用 bit7:EMG.STOPボタンの押下時にグリ-ティングメッセー 24H サーボ ch15のホームポジション ジを送信する 06H EMG.STOPボタンの動作モード 1FH サーボ ch10のホームポジション 21H サーボ ch12のホームポジション 23H サーボ ch14のホームポジション 25H サーボ ch16のホームポジション 26H サーボ ch17のホームポジション 初期値:00H EMG.STOPボタンを押した場合のサーボモータの 初期値:78H 絶対値で表した、各サーボモータのホームポジ 動作を指定します。 0:動作を停止させてフリーになる ションを記録した番地です。 00H ∼ 0FFH の値が書き込めます。 1:ホームポジションに移動させる 2:ボタン操作を無視する 電源ON時やH命令でサーボがホームポジション に移動する際に参照されます。 27H サーボ ch0 の最小ポジション 39H サーボ ch0 の最大ポジション 28H サーボ ch1 の最小ポジション 3AH サーボch1 の最大ポジション 29H サーボ ch2 の最小ポジション 3BH サーボ ch2 の最大ポジション 2AH サーボ ch3 の最小ポジション 3CH サーボ ch3 の最大ポジション 2BH サーボ ch4 の最小ポジション 3DH サーボ ch4 の最大ポジション 2CH サーボ ch5 の最小ポジション 3EH サーボ ch5 の最大ポジション 2DH サーボ ch6 の最小ポジション 3FH サーボ ch6 の最大ポジション 2EH サーボ ch7 の最小ポジション 40H サーボ ch7 の最大ポジション 2FH サーボ ch8 の最小ポジション 41H サーボ ch8 の最大ポジション 30H サーボ ch9 の最小ポジション 42H サーボ ch9 の最大ポジション 31H サーボ ch10の最小ポジション 43H サーボ ch10の最大ポジション 32H サーボ ch11の最小ポジション 44H サーボ ch11の最大ポジション 33H サーボ ch12の最小ポジション 45H サーボ ch12の最大ポジション 34H サーボ ch13の最小ポジション 46H サーボ ch13の最大ポジション 35H サーボ ch14の最小ポジション 47H サーボ ch14の最大ポジション 36H サーボ ch15の最小ポジション 48H サーボ ch15の最大ポジション 37H サーボ ch16の最小ポジション 49H サーボ ch16の最大ポジション 38H サーボ ch17の最小ポジション 4AH サーボ ch17の最大ポジション 初期値:14H 絶対値で表した、各サーボモータの最小ポジ 初期値:DCH 絶対値で表した、各サーボモータの最大ポジ ションを記録した番地です。 00H ∼ 0FFH の値が書き込めます。 ションを記録した番地です。 00H ∼ 0FFH の値が書き込めます。 %及び角度でのポジション指定で最小値として 参照されます。 %及び角度でのポジション指定で最大値として 参照されます。 注意:Zコマンドによる、最小値と最大値の書き換えでは、指定された数値をそのまま記録する だけで、妥当性のチェック行いません。 必ず最小ポジション<最大ポジションになる様に値を設定してください。 また、最小値と最大値の間を等分する演算を行いますので、両者の間の値が近いと、ポジション 指定が細かくなりすぎ、サーボの位置が追従しなくなります(位置分解能が有限のため) ● Hb,n ■コマンド一覧 ホーム復帰命令 n=0:ホーム復帰:予め設定されているホームポ サーボ ch の識別文字 サーボch 識別文字 サーボch 識別文字 ジションに移動する。 n=1: 最小移動:予め設定されている最小ポジ 0 0 9 9 1 1 10 A 2 2 11 B 3 3 12 C ホームポジションをセットし、サーボを停止に する。 4 5 4 5 13 14 D E n=3:最小シャットオフ:予め設定されている最 小ポジションをセットし、 サーボを停止にする。 6 6 15 F 7 7 16 ( ●Sb,P,c0c1c2c3...c17 パーセントでのブロック指定 8 8 17 ) ションに移動する。 n=2:ホームシャットオフ:予め設定されている ●Sb,R,c0c1c2c3...c17 角度でのブロック指定 先頭一文字がコマンド文字 ●Sb,X,c0c1c2c3...c17 全範囲のブロック指定 b= ボード番号0∼9 c= サーボ ch の識別文字 ● Sb,QP パーセントとしてサーボ位置をブロックで報告 nnn=サーボの位置指定数値 C0 ∼ C17= 各サーボの位置指定 16 進数 2 桁 ● Sb,QR 角度としてサーボ位置をブロックで報告 ● Sb,QX 全範囲としてサーボ位置をブロックで報告 ●Pb,cnnn,cnnn,cnnn... パーセントでの位置指定 ● Sb,QB 記録されているサーボの開始点をブロックで報告 ●Rb,cnnn,cnnn,cnnn... 角度での位置指定 ● Sb,QE 記録されているサーボの終了点をブロックで報告 ●Xb,cnnn,cnnn,cnnn... 全範囲の位置指定 ● Sb,QH 記録されているサーボのホームポジションを ● Gb,n 動作/停止の指示 ブロックで報告 ● Qb,P,ccccc... n=0:サーボ動作の停止。 n=1:サーボ動作の開始。 パーセント形式でポジションを報告 ● Qb,R,ccccc... 角度形式でポジションを報告 ● Qb,X,ccccc... * KEISEEDS の新製品 ニュース は共立電子の ホーム の新製品ニュース ニュースは共立電子の は共立電子のホーム ページ 「http://www.kyohritsu.com/ 」 でご覧い http://www.kyohritsu.com/」 ただけます。 全範囲形式でポジションを報告 ● Qb,Y 動作モードの報告 本製品のお問い合わせは 〒 556-0004 大阪市浪速区日本橋西2−5−1 共立電子産業株式会社、ケイシーズ担当までお願いします TEL (06)6644-0021 FAX (06)6644-0824 Email:[email protected] Copyright 1999 ∼ 2005 (C) 共立電子産業株式会社
© Copyright 2026 Paperzz