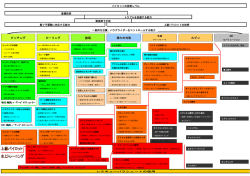
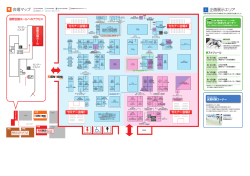
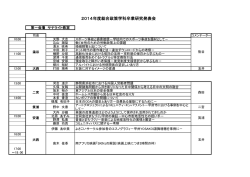
ドローン運用講習会 (空撮機概要と安全運用) 資料製作 worth-RC 北 秀夫 初版作成日 平成27年10月26日 更新日 平成28年 2月17日 http://worth-rc.net/ REV 6.2A 複写厳禁 初めに 平成27年12月10日に改正航空法が施行されました。 事件を除いて起きた事故は、特別な知識や操縦技術が無くても撮影できることが要因と考えます。 改正航空法の施行に伴って企業や団体からライセンス制度や講習会の企画が出てきています。 本資料は平成23年末から4年間の経験やノウハウを基に動画・写真を取り入れた事例を中心とした 資料です。(資料内の機材等は1オペレータでの説明となっています) ライセンス取得には、構造知識、航空力学的知識、航空法知識、民事刑事に関する基礎知識など ドローンに関して別途テキストなどの資料を入手して学習していただく必要があります。 筆者のラジコン経験を以下に紹介します。 経験年数 20年以上 機体製作経験 ①電動飛行機 10機 ②エンジンヘリ 6機 ③電動ヘリ 13機 ④自作ドローン 9機 ⑤メーカー製組み立てドローン 4機 姿勢制御装置の設定調整経験 (各FWバージョンも確認) ヘリコプター AceOne NAZA-H ドローン Phantom2 NAZA-M V1 NAZA-M V2 Wookong-M A2 2.4G DataLink & iPAD-GS プロポ使用経験 JR製(日本遠隔制御) PCM9XⅡ DSX11 DSX12 Futaba電子工業 14MZ T10J 14SG XG11 W orth-rc 北 秀夫 講習内容は2部構成です 1部 空撮機概要 (スライド31枚) 空撮機体の種類、構造概要、安定性、センサー類、映像の安定化、プロポ の通信方式や電波強度、参考動画&写真撮影事例などを動画と写真を多く 取り入れて概要説明を行っています。 2部 運用解説 (スライド46枚) 改正航空法の主な変更点、安全運用のための知識と注意点、不具合事例 の解説、責任、報道事例の見解など運用面で必要な事柄について動画と写 真を多く取り入れた説明を行っています。 W orth-rc 北 秀夫 1部 空撮機概要 1.ドローンの定義 2.空撮機体の種類(利点と欠点)、構造概要、安定性、センサー等 空撮映像の安定化 3.操縦システム、テレメトリーシステム 4.プロポの通信方式と電波強度 5.自動飛行装置の活用 6.参考動画 合計スライド31枚 W orth-rc 北 秀夫 1. ドローンの定義 ドローンとは、無線操縦或いは自動操縦によって飛行する無人航空機を指します。 したがって以下の無人航空機はすべてドローンとなります。(写真の左から2つが空撮機として使われます) 当初は軍事用の無人偵察機のことをドローン呼んでいました。 マルチローター ヘリコプター(マルチコプター) Drone(英語)=雄の蜂(日本語の意味)。 飛んでいる時の音が同じであることから シングルローター ヘリコプター ドローンと言われた。 飛行機、グライダー ※これ以降はマルチローターヘリコプターをドローンと表記します。 W orth-rc 北 秀夫 2.1 空撮機体の種類 (ヘリコプター) ヘリコプター仕様空撮機 (業務仕様 AceOne搭載) 実機でよく見るタイプ メインローターとテールローターを有する。 利点: 1.離れても姿勢を認識しやすい。 2.長時間撮影時はエンジンを使える。 3.大きなメインローターは大きな遠心力が働き 風に対する安定性が良い。 4.メインローター回転が一定のピッチ制御のため 急降下時も安定飛行が可能。 5.主要部分は機械部品のため、 卓上で調整状況の確認が可能。 6.エンジンやモーター停止時はオートローテーション 機能を使って回収が可能。 欠点: 1.機械的な構造が多くメンテナンスに手間が掛かる。 2.メインローターが大きく周囲に恐怖感を与える 3.風きり音が大きいため苦情が出やすい。 T-REX700E 総重量8kg 2012年以前はヘリコプタータイプが ラジコン空撮の主流。 W orth-rc 北 秀夫 2.2 空撮機体の種類 (ドローン) ドローン空撮機 (業務仕様) 2016年現在はドローンが主流。 複数ローター(ブレード)を電気的に制御してヘリコプターと 同じ動作をする。 利点: 1.プロペラが小さく恐怖感が少ない。 2.機械部品がないため機械的な調整が不要。 3.メンテナンスが容易。 S800 総重量7kg 欠点: 1.ローターの数は通常6枚以上では離れると円に見えるため 視認性が劣る。 2.降下はプロペラの回転を下げるので 降下スピードが速いと不安定になる。 3.全てが電子制御のため 調整の目視確認ができない。 4.6ロータ機でも回転系の2重故障時は即墜落する。 S900 総重量7.8kg W orth-rc 北 秀夫 2.3 機体の制御概要 ドローンが急速に普及したのは、ヘリコプターのように熟練した技術を要する調整が必要な機械的構造 がなく、全てが電子制御の安価で標準的な製品が制作できるようになったことが大きい。 マイコン 制御 マイコン 制御 プログラム テール・ローター 制御 W orth-rc 北 秀夫 2.4 プロポ操作と機体の移動方向 複数の機体を1つのプロポで操縦する場合は右写真のような プロポを使います。また、プロポ操作と機体の動きは写真の 説明の関係にあります。 エレベータ操作 ラダー操作 スロットル操作 エルロン操作 ①左のエレベータを上に倒すと前進。下に倒すと後退。 ②左のラダーを左に倒すと左回転。 右に倒すと右回転。 ③右のエルロンを左に倒すと左に移動。右に倒すと右に移動。 ④右のスロットルを上に倒すと上昇。下に倒すと降下。 PHANTOMやINSPIRE1などセット品では専用のプロポが 付属します。 ピッチ方向 ロール方向 ヨー方向 W orth-rc 北 秀夫 2.5 空撮機体の構造概要 (ドローン) ドローン (ローターは固定ピッチ) 前進後退・左右移動・回転・上昇降下の動作。クワッドコプターでは、M1~M4モーターの組み合わせ と回転数によって制御されます。 動画 W orth-rc 北 秀夫 2.6 空撮機体の構造概要 (ヘリコプター) ヘリコプター (ローターは可変ピッチ) 前進後退・左右移動・上昇降下は中央部のスワッシュプレートの傾きや上下でメインローターの角度を 微妙に変化させて行なう。回転はテールローターで行ないます。 メインローターの回転は一定。 動画 W orth-rc 北 秀夫 2.7 降下時のドローンとヘリコプターの違い 天候によって降下時の特性が変わります。気圧の変化で上昇気流や下降気流が発生します。 この場合のドローンとヘリコプターの制御の動きを概念的に見てみます。 ドローンの大半がプラス約4度~6度の固定ピッチ。 降下時は回転を低下させて重力により降下するので、 上昇気流があると更に回転を下げる必要があります。 あまり回転を落とすと姿勢制御不能となります。 上昇気流なし 上昇気流あり ヘリコプターはプラス12度~マイナス12度程度の可変ピッチ。 ローターの回転は一定で、ピッチ角度を浅くする度合に よって降下スピードを変えています。 マイナスピッチを使うと急降下が可能です。 プラスピッチ 上昇気流あり 上昇気流なし ボルテックスリング ボルテックス・リング マイナスピッチ ボルテックスリング は発生しない ボルテックスリング ローターは 右回転 重力 - 赤4の揚力 重力 - (赤4 + 青2) 重力 - 赤4の揚力 重力 + 赤2 + 青1 のスピードで降下 の揚力のスピードで降下 のスピードで降下 の急降下が可能 プロペラによる風の方向 上昇気流と降下による下からの風 W orth-rc 北 秀夫 2.8 降下時の安定性比較 (ドローン) ドローンの降下はローターが固定ピッチのため回転を下げて降下する。したがって降下時の下からの 降下と風による乱気流に対して、低い回転で制御する必要がり安定制御が難しい。(GPS-ATTIモード) 早い降下によって弱いボルテックスリングが発生し唸るような音がしている。 詳細は運用編で解説。 動画 W orth-rc 北 秀夫 2.9 降下時の安定性比較 (ヘリコプター) ヘリコプターはローター回転が一定でローターのピッチ角を低くして降下するため、降下時の下から の風による乱気流が抑えられて制御が安定している。 ドローンより早い降下ができる。(GPS-ATTIモード) 回転音にムラがなく安定している。 動画 W orth-rc 北 秀夫 2.10 空撮機体のセンサー類 ラジコン空撮の機体には姿勢制御高機能マイコンとセンサー類が搭載されています。 姿勢制御装置の主なセンサー機能概要 ① ② ③ ④ ⑤ ⑥ GPSセンサー 気圧高度センサー 3軸加速度センサー 3軸ジャイロセンサー 磁気コンパス 動力電源電圧監視 座標監視して定点静止が可能 飛行高度を監視 水平を維持 外乱抑制 方位を計測 電力低下による墜落防止に活用 DJIコントローラーにおけるモードの違い ・GPS-ATTIモード GPSデータにより指示座標を維持。 ・ATTIモード 水平は維持するが風や慣性で移動する。 ・マニュアルモード 常に当て舵操縦(補正操作)が必要。 次スライドの 動画で確認 ※ センサー類の詳細は各種解説書を参照ください。 W orth-rc 北 秀夫 2.10.1 空撮機体のモード別飛行比較 DJI製 メインコントローラのモード別飛行状況を動画でご覧ください。 GPS-ATTI(指示座標維持と水平維持)、ATTI(水平維持のみ) (規制区域外) 動画 W orth-rc 北 秀夫 2.10.2 空撮機体のモード別飛行比較 DJI製 メインコントローラのモード別飛行状況を動画でご覧ください。 (規制区域外) マニュアルモード(常にスティック操作が必要。左の親指に注目ください。微妙な動きです) 風速2m程度のやや横風の日の撮影です。風の日は暴れないように予測操作が必要です。 動画 W orth-rc 北 秀夫 2.11 空撮映像の安定化 ① 機体の振動は映像のこんにゃく現象やブレが混じります。 機体の振動をカメラに伝えないよう工夫する。 ② 機体の揺れは動画を醜いものにします。 風や操縦方法での機体の揺れがカメラに伝わらないようにする。 ① 次のスライドで説明。 ② カメラ安定装置(ジンバル)を使用する 2軸又は3軸があり、2種類の制御方式があります。 ブラシレス方式・・・・トルクは小さいが反応が早い 動画向き。カメラ毎の微調整が必要。 サーボ方式・・・・・・・トルクは大きいが反応が遅い 写真向き。カメラの多少の違いは問題ない。 W orth-rc 北 秀夫 2.11.1 ブラシレス式ジンバル 機体の振動対策と揺れ対策は使用するカメラに合わせて行います。 αゲルと中空ソフトゴムダンパーで 機体の振動を吸収。 ブラシレスダイレクト駆動モーターと 専用コントローラーでカメラの静止 制度を向上させます。(自作) W orth-rc 北 秀夫 2.11.2 サーボ方式ジンバル ヨーサーボ ロールサーボ ピッチサーボ 3軸ジャイロ W orth-rc 北 秀夫 3.操縦システム カメラ映像表示モニター 機体のセンサー情報もOSD表示 カメラ映像電波受信アンテナ 飛行時間管理用タイマー プロポ(機体操縦とカメラ制御) 操縦システムオンボードトレー (肩掛けベルト取り付け用) 筆者のS900用 JR製 DSX12 プロポ W orth-rc 北 秀夫 3.1 テレメトリーシステム Futaba製プロポのテレメトリーシステムはセンサー機能が充実して洗練されています。 動力電源電圧を監視しプロポが振動して知らせると同時に警告音でも知らせる機能があります。 運用面で非常に有効です。 受信機電圧と動力電源電圧の監視が可能 筆者の練習機用 Futaba製 14SG ケイホウ : INH→ACT で機能ON キョウカイチ : 警報するしきい値電圧を設定 シンドウ : 振動パターンを設定 W orth-rc 北 秀夫 4.1 プロポの通信方式と電波強度 2.4GHz帯のプロポが日本で認可される前のラジコン電波の運用 日本国内のラジコン用の無線電波には陸上用と空用として周波数が27MHz帯、40MHz帯、 72MHz帯の3グループとなっています。 この中で空用で多く使われている72MHz帯について、もう少し詳しく説明します。 72MHz帯の中は10分割され、これにバンド番号(17,18,19,20,21,50,51,52,53,54) を付けて運用しています。 この帯域の電波を使用した方式のプロポでは同一バンド番号が複数あると必ず混信が起きます。 混信して機体を制御できず墜落する事故がしばしば起きていました。 そのため運用で使用開始前に、今から18番を使用しますと宣言してからプロポの電源をいれる ルールができていました。 また、見えないが近くに同一バンドNo(周波数)が使用している可能性があるので、バンドモニター を活用し混信による事故を防止する運用もされていました。 (注) ラジコン用すべての周波数について強力な電波を発射するTV電波塔、携帯電話電波中継塔や電磁波の強い 送電鉄塔近くでは使用しないこと。この様な場所では、プロポの電波の方が弱いため誤動作の危険性が高い。 W orth-rc 北 秀夫 72MHzプロポを使うときはプロポと受信機のバンド番号を合わせます。(例:52) プロポに52番のクリスタルを付けるか、 シンセサイザープロポのダイヤルを52にセット 受信機に52番のクリスタルを付けるか、 シンセサイザー受信機で同一番号に合わせる。 W orth-rc 北 秀夫 4.2 プロポの通信方式と電波強度 プロポの2.4GHzの無線電波の運用 2.4GHz電波の利用状況 この周波数の電波は当初はノートパソコンなどをネットワークに接続する際に、ケーブルを使用 せずに利用できることを目的に開発されたのが無線LANの始まりです。 やがて2.4GHzの電波を使用するデバイスはラジコン、デジタルカメラのWiFi接続、監視カメラ 映像伝送としても利用されています。 この様に多方面で利用されていることから通信の衝突が起きる状況は多くなるため、各種通信 規格を設けて正常なデータ伝送できるようになっています。 以降に無線LANとプロポの通信方法の違いと衝突した場合の手順の概要を説明します。 W orth-rc 北 秀夫 4.3 プロポの通信方式と電波強度 無線LANでの2.4GHzの運用 無線LANは2.4GHzの電波を11チャネルに分割して複数あるルータの一つが1つのチャネル を占有します。そのチャネルに複数のパソコンが論理的に接続されて情報通信を行っています。 無線ルータがPC2とPC3との通信でCH1が渋滞すると、PC1は通信できないので一定時間後 に通信の開始行為を行います。このとき空いていれば通信ができるようになります。 無線LANではこのように、規格化されたネットワーク通信手順によって制御されています。 データは図に示すようにパケット単位(小包のようなもの)で2.4GHz電波内を流れます。 無線ルータ PC1 PC2 PC3 CH1 CH2 CH3 ・ ・ W orth-rc 北 秀夫 4.4 プロポの通信方式と電波強度 ラジコンでの2.4GHzの運用 ① ラジコンのプロポの場合は無線LANと違ってチャネルを占有せず一定時間ごとにチャネルを 切り替えながらプロポの情報(SW情報、スティックの位置情報など)を受信機に送信しています。 この方式のことを周波数ホッピング方式通信といいます。 ② プロポは受信機との間でBIND或いはLINK手続きを行ってペアリングする必要があります。 ペアリングしたプロポと受信機間ではお互いのIDで識別して通信をおこなうため、他のプロポ IDの情報は受信はしますが破棄します。このように衝突情報は処理されないため機体の暴走は 発生しないようになっています。 (衝突による処理の遅れは起きますが、実動作にはほとんど影響は出ないとされています) プロポ1 プロポ2 無線LAN 受信機1 受信機2 プロポ3など CH1 CH2 CH3 ・ ・ CH11 W orth-rc 北 秀夫 4.5 プロポの通信方式と電波強度 プロポ側アンテナの電波強度について アンテナの向きに関してプロポの取り扱い説明書を参照して適切にアンテナ の向きを合わせる必要があります。(Futaba製プロポの説明は取説を参照) JR製プロポXG11取り扱い説明書を引用 W orth-rc 北 秀夫 受信機側アンテナの電波強度について 機体の向きが変化してもアンテナの受信感度が著しく低下しないように、2本の 同軸アンテナを90度の向きで機体に配置します。(Futaba製も90度で配置) テレメトリー を兼用する EXTアンテナ JR製プロポXG11取り扱い説明書を引用 W orth-rc 北 秀夫 機体へのアンテナ取り付けでの注意点について 機体の伝導体フレーム(カーボンを含む)と並行せず5cm以上離す。更に機体が回転 したときに受信機アンテナが機体で遮蔽されないように配置する。2本の同軸アンテナは 90度の向きで機体に配置します。(Futaba製も90度で配置) JR製プロポXG11取り扱い説明書を引用 W orth-rc 北 秀夫 5.1 自動飛行装置の活用 iPAD-GSによる簡単自動飛行 製品はDJI製のマルチコプター型ドローン に対応しています。 iPADとデータリンク装置のみの小型で持 ち運びが容易です。 写真は7.9インチiPADとデータリンクの セットです。 (人口集中地区以外でも自動操縦は 国土交通省の許可が必要) W orth-rc 北 秀夫 5.2 自動飛行装置操作例 iPAD-GS操作例 50ポイントまで設定可能で、各ポイントでの高度、スピード、停止時間を設定可能です。 この機能とカメラコントロール専用プロポの併用で効果的な監視活動が可能です。 W orth-rc 北 秀夫 5.3 飛行位置表示のみの運用 (未飛行) iPAD-GS座標表示での運用 (プロポで操縦して機体位置表示での利用) この機能はドローンが現在どの位置を飛行しているかを確認するのに有効。 (自動操縦ではないが人口集中地区での飛行には国土交通省の許可が必要) 機体の位置と方向 離陸地点 W orth-rc 北 秀夫 6.参考動画 撮影例1 鉄塔をS900とSony-AX100 4Kビデオカメラで12倍ズーム撮影 送電鉄塔の空撮(四季が丘公園) 動画 W orth-rc 北 秀夫 6.参考動画 撮影例2 (鎧滝) 動画 60cm小型ドローンによる狭い場所での撮影(GPS機能停止状態、ハンドリリース&キャッチで撮影) W orth-rc 北 秀夫 1部の「空撮機体の概要説明」は終わりです。 特殊な機材や高度な技術を必要としない空撮は、低価格で高性能なカメラ付き機体が発表さ れ自社業務で必要な空撮映像は自社撮影する状況が急速に進んでいます。 問題点 安定撮影が重視されて技術知識・操縦スキル・安全運用の意識が疎かになる傾向があります。 2部では安全運用・ヒアリハットした不具合事例を中心に解説していきます。 業務での安全運用に重要な事柄が多く含まれています。 W orth-rc 北 秀夫 空撮機体の概要に関する質疑応答 15分程度の休憩タイム W orth-rc 北 秀夫 2部 安全運用 6.1 6.2 6.3 6.4 6.5 6.6 6.7 改正航空法 撮影体制 事故に至る要因 メンテナンス関連 操縦技術の維持向上訓練 飛行マニュアルを作成 悪意をもった妨害電波の発射 合計スライド31枚 W orth-rc 北 秀夫 6.1 安全運用 (改正航空法) 平成27年12月10日に改正航空法が施行されました。これを遵守した運用に努めなければなりません。 飛んでいる物体は墜落の危険性を秘めていることを自覚し、常に事故回避行動が取れる準備と日頃の 安全管理を行い運用する必要があります。 改正航空法の主な変更点 (詳細は国土交通省のHPを参照願います。) 1.通常飛行高度は地表または水面から150m以下。 2.200gを超える無人航空機が規制の対象。 3.空港周辺は空港管理事務所と国土交通省への申請が必要。 4.人口集中地区内は空き地であっても規制対象。また私有地上空を通過する場合は地権者の許可が必要。 5.人口集中地区外でも私有地上空を通過する場合は地権者の許可が必要。 6.建物内での飛行は200g以上であっても規制対象外。 7.無人航空機とは従来の無線操縦のラジコン飛行機・グライダー・ヘリコプタ・ドローン(マルチコプター) と明記されている。 8.指定された重要施設周辺(原子力発電所、国家施設など)は特別な許可が無い限り飛行禁止。 9.人・建物・鉄道などの車両から30m以内に近づく場合は許可が必要。 10.夜間飛行は原則禁止。どうしても夜間撮影を行なう場合は許可が必要。 11.操縦者が肉眼で視認できない飛行は原則禁止。自動操縦飛行時は許可が必要。 12.法令違反した場合は50万円の罰金が科せられる。 13.飲酒操縦の禁止。 ・ ・ ※ 2項,9項を次スライドで説明します。 W orth-rc 北 秀夫 改正航空法の主な変更 200g前後の機体とは 写真は改正航空法が施行されるまでは玩具扱いでした。 上半分はフランスParrot社製のBebup-Drone(左)と日本で最初に普及したAR.Drone(右)ですが規制対象。 日本の京商ドローン(玩具) W orth-rc 北 秀夫 改正航空法の主な変更点 対象から30mの距離とは 国土交通省のQAで示すように、30m離れるとは対象からの直線距離なので半径30mおよび高さ30mの 半球状内に入らなければ許可申請は不要です。(注)人口集中地区やイベント会場は許可申請が必要。 30m 対象 30m 30m W orth-rc 北 秀夫 6.2 安全運用 (撮影体制) 空撮の基本体制 1) イベントや人口集中地区での撮影。 イベントなどでは飛行する機体の状態と周囲の状態を常に把握する監視員を 配置して、異常を認めたときは即座に操縦者に伝えられる体制にしておく。 ・操縦者 1名 ・カメラ操作者 1名 ・監視員 1名以上(規模に応じて決める) の3名以上で業務にあたる。 2) 人は多くないが撮影ポイントを確認する時間が長い場合。 操縦者がカメラ操作に注意を奪われると機体の操縦がおろそかになるため、 ・操縦者 1名 ・カメラ操作者 1名 の2名体制で業務にあたる。 3) 撮影に集中する必要を要しない撮影。 撮影場所の確認やシャッター操作が簡単に短時間で行える場合に、1人で 操縦とカメラ操作を行う時は機体から目を離すのは1秒以下とすること。 W orth-rc 北 秀夫 6.2.1 iPAD-GS座標表示での運用体制例 安全性を確保しつつ正確なポイント撮影を行う体制例を以下に示します。 ①機体操縦を専門に行う操縦者 ②カメラ操作を専門に行うカメラマン ③機体の位置を把握する人 ④周辺の安全を確保する監視員 を1チームとして運用するのがベストです。 無人機 カメラジンバル iPAD画面 周辺監視 機体操縦 機体カメラ操作 機体位置監視 監視要員 兼任も可 イラストは国土交通省の無人航空機(ドローン・ラジコン機等)の飛行ルールより引用 W orth-rc 北 秀夫 6.3 安全な運用 事故に至る要因(例) 1)操縦が未熟。 実際の機体を操縦する前に練習専用機やフライトシミュレータで十分操縦練習を行なう。 業務使用者はマニュアル操縦など高度なスキルを持つべきでしょう。 また、早い垂直降下を避けてボルテックスリング・ステイトに入らないようにする。 2)GPS飛行は時に誤作動する可能性に関して認識してない。 離陸時に衛星補足が正常でも飛行場所によって不安定になる場合がある。 3)衛星の補足が十分でない状態で直ぐに離陸するケースがある。 LED表示等で衛星補足が安定してから離陸する。 (衛星捕捉数は季節や時間帯で変化する) 次スライドで詳細説明 4)①以外の暴走を食い止める機能を活用していない。 ① GoHome 機能 (機体を見失ったときプロポ操作で起動できる) ② Low-Voltage Alert 機能 ③ Limits 機能 (飛行エリア制限。高度50m距離100mなど) 5)マナーを守らない無謀な飛行でコントロール不能。 ドローンは誰でも簡単に飛ばせるが目視できない距離まで離して対処できなくなる等。 6)LiPo電池の管理不足。(知らない?) ドローンは動力バッテリーが命で電池切れや不良は即墜落と言うことを認識すること。 7)人が集まる場所での安全対策不足。 人に接触してプロペラで怪我をしないように対策する必要があるが未対策で運用。 (法改正後はプロペアガード、パラシュート等が必要) 次スライドで詳細説明 W orth-rc 北 秀夫 6.3.1 ボルテックス・リング・ステイト (乱気流状態) ドローンの弱点であるボルテックス・リング 早い垂直降下操作を行う ボルテックス・リング・エリアが物体として落下 ボルテックス・リング エリア 降下によって自分の吹き降ろし風の中に機体が入る ローター周辺にボルテックスリングを形成 ボルテックスリング 回転翼であるローターは揚力を失う (振動を伴う) スロットルを上げても揚力は発生しない 機体は急降下して墜落 離脱方法 スロットルを下げつつ前後左右の舵を打ってリングから 抜け出す。(マニュアルの方が自動補正が働かないの で離脱しやすい) ボルテックス・リングに入りやすい操作と対策 1.早い垂直降下の撮影をしたい。 対策:1m/秒付近で降下して編集で早送りする。 2.高高度から電池切れになる前に早く降ろしたい。 対策:1m/秒以上の速さで降下させる場合は旋回 しながら降下してリングの発生を防止する。 地面 W orth-rc 北 秀夫 6.3.2 安全運用 3)衛星補足不十分で離陸 衛星補足が未完了で離陸し飛行途中で完了すると、その地点をHOMEとして登録される。 飛行を続けて途中でトラブルが起きGoHome機能が起動されるとHomeに戻って着陸する 動作に移行する。ここで問題は、そこが海の上といった事態となる。 Home 未登録で離陸 着陸 Home 登録 GoHome起動 W orth-rc 北 秀夫 6.3.3 安全運用 4) ①GoHome機能の説明 Home地点から離陸して山の周囲を撮影して山に隠れる行動をとったとします。 山の裏側に行って操縦電波が遮断されるとフェールセーフ状態になりGoHome機能が起動します。 GoHomeはHomeポイントに向かって直線的に進むので高度によっては山に激突します。 操縦者と機体の間に障害物が無い飛行をするよう最新の注意が必要です。 W orth-rc 北 秀夫 6.3.4 安全運用 4)②Low-VoltageAlert機能の説明 Futaba製プロポの動力電圧監視機能を併用すれば安全運用面でさらに有効。 W orth-rc 北 秀夫 6.3.5 安全運用 4) ③ Limits 機能の説明 姿勢制御コントローラのLimits項目で高度10m、距離100mに設定した場合は図のように飛行が制限 されます。(DJI製MCの機能) 離陸地点からスロットルを上げ続けると高度10m位置で自動停止して上昇できなくなります。降下は可能。 また水平方向に移動する操作を続けても100m位置で自動停止して100mを超えることが出来ません。 つまり図の円筒形内でのみの飛行に制限するのがLimits機能です。 ※ 衛星補足数が減少しGPS-ATTIモードからATTIモードに移行すると、本設定は機能しません。 W orth-rc 北 秀夫 6.3.6 DJIパラシュートについて 人口集中地区での飛行申請は、これを組み込むと許可が下り易いようです。 W orth-rc 北 秀夫 6.4 安全な運用 (メンテナンス関連) 飛行マニュアル作成で必要な事柄(一例) 1)ネジ緩みはないこと。(プロペラ周辺は重要) 2)動力コネクターに腐食など異常が無いこと。 3)飛行直前のLiPo(機体搭載状態)が満充電であること。 4)各種信号ケーブルが確実に取り付けられていること。 5)プロペラの回転方向が正しいこと。 6)折りたたみ式アーム機の場合はアームが完全にロックされていること。 7)LiPoは未使用と使用済を明確に分けておくこと。 8)LiPoの外見に空気が入ったような膨らみが無いこと。 9)Lipoのセルバランス確認、温度管理、視認性確保について。 10) 気象状況や滞空時間を把握する。 10)LiPoを長期(1ヶ月以上)保管する場合は60%前後であることを確認する。 11)プロペラに亀裂や破損が無いこと確認する。 12)プロポ(操縦装置)の電池が十分充電されているか確認する。 13)操縦技術の維持向上の訓練を実施する。 ※これらの内容に沿ったチェックシートを作成して管理運用する。 1、2、7、8、9、10、13項を写真と図を盛り込みながら説明します。 W orth-rc 北 秀夫 6.4.1 安全な運用 (メンテナンス関連) 1項の「ネジ緩みはないこと。(プロペラ周辺は重要) 」の解説。 ナット止めしたプロペラや折ペラ使用時は、ナットやネジが緩む可能性がある。 定期的に緩みがないかを点検しなければならない。 しかし、ナット止めタイプで増し締めを繰り返すとボルトにクラックが入る可能性がある。 ネジゆるみ確認の確実性と作業の効率化のためマーカーペンの使用が有効。 緩んでいるとマーカーにズレがでて一目で確認できる。 尚、2015年以降はナット止め方式は飛行中緩まないセルフロックペラが主流になっています。 W orth-rc 北 秀夫 6.4.2.1 安全な運用 (メンテナンス関連) 2項の「動力コネクターに腐食など異常が無いこと」の解説。 動力用のLiPo電池は機体の大きさにもよるが大電流(数十アンペア)が流れている。 コネクター部は劣化しやすいのでこまめに点検し異常が認められた場合は早急に新品と交換する。 コネクターには色々なタイプがあります。 写真の左はメッキ剥がれ、右は接続時のスパークで解けた状態です。 コネクター交換には適切な半田ごてと半田付け技術が必要。 不適切な半田付けは飛行中の墜落事故に繋がる。 W orth-rc 北 秀夫 6.4.2.2 安全な運用 (メンテナンス関連) 「重要」 半田付け技術習得について。 半田付け技術講習を受けずに 適当に半田付けすると危険です。 表面的に半田付けできたようで も内部は電気的接合が不充分な ことがあります。 企業内など専門教育を受けて ない方はNPO法人が技術指導し ているDVDで学んでください。 DVDはインターネットで注文可。 ¥4000- 温度調節付き半田ごても注文可。 ¥8000-程度 W orth-rc 北 秀夫 6.4.3 安全な運用 (メンテナンス関連) 7項の「LiPoは未使用と使用済を明確に分けておくこと」の解説 業務使用で同じタイプのLiPo電池を複数使っていると、交換時に使用済みと未使用が混在し誤って 使用済みを搭載して運用する可能性があります。 その結果、離陸直前や飛行中の電圧確認を漏らすと、電池切れで墜落する最悪の状況となります。 これを防止するうえでLiPo電池の保管箱に未使用、使用済と明記し確実に取出しと収納を行う。 W orth-rc 北 秀夫 6.4.4 安全な運用 (メンテナンス関連) 8項「LiPoの外見に空気が入ったような膨らみが無いことを確認について」の解説 ①のように飛行前から内部発生ガスでパンパンになっている場合は使用禁止。 この電池は非常に危険なので絶対再使用不可です。使用すると発火する可能性があります。 ②は使用前にほんの少し内部発生ガスが溜まった状態ですが、飛行後に①のようになったときは 以後の使用は中止する。 ③は正常で飛行前と飛行後に手で触って空気が入った形跡がない。 ※ 充電式電池は使用開始からの年数と充放電を重ねるごとに劣化していくので慎重な管理が必要。 W orth-rc 北 秀夫 6.4.5 安全な運用 (メンテナンス関連) ※ 動力用LiPo電池の管理 チェックにはLiPoチェッカーを使用し、長期保管時は約60%充電状態にする。 満充電や10%以下で保管すると壊れやすくなる。 飛行するため冬場に満充電したLiPoは20℃程度の温度を保つ保温箱に入れるのが望ましい。 W orth-rc 北 秀夫 6.4.6 安全な運用 (メンテナンス関連) 9項の「Lipoのセルバランス確認、温度管理、視認性確保」の解説。 ① 1フライと毎にAMP、モータ、LiPoの温度測定をして 50℃を大きく上回らないように運用する。 (夏場は温度上昇しやすいので注意) 温度測定には非接触温度計を使用。 →→→ 動力電源コネクターが接触不良を起こすと温度上昇するので コネクター温度も確認する。 ② LiPoの充電状態とセルバランスを LiPoチェッカーで確認する。 →→→ 2台で確認し値の差が大きいときはバランス端子の 接触不良を考える必要がある。 各セル毎の電圧差は0.05Vを超えない範囲で運用。 (PHANTOM2,3とINSPIRE1は次のスライドを参照) ③ 機体の視認性の確保。 →→→ 私は後部に蛍光オレンジボールを目印に取り付け。 (緑、赤、黄、オレンジの中でオレンジが一番) W orth-rc 北 秀夫 6.4.7 安全な運用 (メンテナンス関連) 6.2.5②の補足、PHANTOM2のバッテリー状態確認例。 ・ INSPIRE1も同等です。詳しくは機体マニュアルを参照ください。 ・ 充放電器によるストアモードが使えません。 ・ 未使用の満充電バッテリーは実際にホバリングして消費させてください。 ・ セル間の電圧差はアシスタント・ソフトを起動すると確認できる。 W orth-rc 北 秀夫 6.4.8 安全な運用 10項の「 気象状況や滞空時間の把握」の解説。 ①撮影直前の気象状況を把握する。 ドローンは機体の大きさによりますが風速8mが飛行可能な 限界。 地上が風速5mの場合でもでも上空は2m~3mプラスして 考える。風速は感覚ではなく風速計で測定する。 150m以上の上空になると地上の2倍以上の風になる場合 もあるので撮影当日の気象状況を十分確認すること。 ②撮影目標までの距離を測定して滞空可能時間を考える。 GoogleMAPで判断できない場合は、撮影目標までの 距離をレーザー距離計などで測定して不必要な飛行を しないようにする。 降下に要する時間も考慮する。ドローンの降下時は不安 定になるので1.5m/秒が限界。(ベストは1m/秒) 150m降下するには1分40秒の時間が必要。 スロットルを絞りすぎるとモーター停止の危険性がある。 W orth-rc 北 秀夫 6.4.9 安全な運用 (実滞空時間の把握) DJI社の製品を例に考えて見ます。代表的な機体の仕様書での滞空時間は以下の通りです。 ①PHANTOM3Pro 最大飛行時間=23分 離陸重量=1280g バッテリー仕様=4S4480mA ②INSPAIRE1 最大飛行時間=18分 離陸重量=2980g バッテリー仕様=6S5700mA ③SW-S900 最大飛行時間=18分 離陸重量=6700g バッテリー仕様=6S12000mA (飛行条件が記載されてないので、実運用でこの数値をあてはめると危険) 安全な滞空時間は運用形態によって変わります。 ①ホバリング中心の写真撮影時はプロペラの推進力だけで自重を定位置に静止させる必用がある。 そのため動力系の電力消費は大きくなり、車に例えると燃費は悪くなります。 ②動画撮影で常に早く移動するような運用ではプロペラは推進力を生み出すことに加えて、飛行機の 翼のような効果を持つことになります。したがって車に例えると燃費は良くなります。 滞空時間の算出方法。 ①運用する機体に撮影機材を搭載した状態でホバリングを6分継続して電池残量を計測する。 ②ここで50%以上残っている場合は更に一定時間ホバリングする。 ③これを繰り返して残量が30%程度になったところを運用時の飛行滞空時間として決める。 W orth-rc 北 秀夫 6.5 安全な運用 (操縦技術の維持向上訓練) 国土交通省の無人航空機の飛行に関する許可・承認の申請・審査要領に沿った操縦技術を習得する。 (GPSによらない操縦とされている) 離陸と着陸、正面ホバー、左右横ホバー、対面ホバー、それぞれの機首方向での前後左右移動などが 安定飛行して操縦できること。 室内操縦練習映像は Galaxy-Visitor6Pro を使用。 動画 W orth-rc 北 秀夫 6.5.1 安全な運用 (操縦技術の維持向上訓練) 屋外での練習。DJI-S800を使用。 (ATTIモード) 誤って操作しても暴走しないように機体をワイヤー等で地面に固定して行なう。 (注)国土交通省に確認。この場合でも人口集中地区内では許可申請が必要。 動画 W orth-rc 北 秀夫 6.5.2 安全な運用 (操縦技術の維持向上訓練) 機体をロープで地面に固定して操縦した場合に、ロープが突っ張ると墜落しないか 心配される方のために実験しました。結論:S800クラスでは特に問題ありません。 実験結果を動画で確認ください。 (ATTIモード) 動画 W orth-rc 北 秀夫 6.5.3 安全な運用 (操縦技術の維持向上訓練) AUTOモードでの不測の事態に備えてマニュアル操縦の訓練をお勧めします。 GPS-ATTI,ATTIなど自動補正が不具合時にマニュアル操縦で異常事態を回避できる場合があります。 最新の旅客機でもマニュアル操作が残っています。最終的には人の判断ということです。 動画 W orth-rc 北 秀夫 6.6 安全な運用 (飛行マニュアルを作成) 業務で無人航空機を使用する場合は飛行マニュアルを作成して遵守する。 (趣味での飛行を除いて飛行許可申請で必要になる) 詳細は国土交通省航空局HPの「許可・承認申請の申請書記載例」の12頁 を参照して、自社なりのマニュアルを作成して運用する。 ※ 業務使用では上記マニュアルに加えて点検管理手順や管理表の管理が 必要になるので事前に作成しておく必要がある。 他にも細かく指示されていることがあるので法令を熟読して遵守する 必要があります。 W orth-rc 北 秀夫 6.7 悪意をもった妨害電波の発射 GPSジャマー使用によるドローンの正常飛行の妨害行為。 GPSジャマー(GPS Jammer)とは、微弱な電波を発生させてGPSの電波を妨害し、自動車、船、 飛行機等に搭載したGPS受信機への電波を遮断することができる装置です(携帯電話の電波も遮断 できます)。 その遮断範囲はGPSジャマーの周囲1~2mから装置によっては1~2Kmに及ぶものが存在する。 写真は携帯型の製品で1万円から2万円程度で購入可能。出力は5~10m程度と弱い。 オンラインショップ【eモンズ】 で販売の小電力タイプのジャマー 今後はトラブル発生時に何が問題なのか後日原因追及できるフライトレコーダー機能も必要になると 考えます。 W orth-rc 北 秀夫 ここまでの安全運用に関しての質疑応答。 15分程度の休憩タイム W orth-rc 北 秀夫 2部 安全運用 7.責任 8.不具合事例 9.報道事例の見解 スライド 1枚 スライド11枚 スライド 5枚 合計17枚 W orth-rc 北 秀夫 7. 責任 ドローン操縦も自動車の運転、船舶操縦などと同じように刑事責任、民事責任、地方条例など の責任が存在します。 刑事責任は、総理官邸への事件、少年における再三の飛行禁止注意無視、他人の敷地内への 不法侵入など法律で禁止されている行為に対する責任です。 ドローンでの注意点は改正航空法で明確にされたので、これを遵守しなければなりません。 民事責任は、空撮を行っているときの偶発的な不具合や操縦ミスによって墜落し、それによっ て第三者に人的や物理的な損害に対する賠償責任となります。ドローンの多くは空撮目的の ためプライバシーの侵害も発生します。 地方条例に対する責任は、法律では禁止されてないが地方自治体が個別に定める事項があり ます。この条例に違反すると罰金の支払いなどが発生します。 民事責任は賠償が主な責任となりますので、使用形態に応じた保険に加入する必要があります。 個人など趣味での使用 ・・・ ラジコン保険、個人賠償責任保険 業務使用 ・・・・・・・・・・・・・・ 保険会社個別の施設賠償保険 DJI社では機体購入とセット販売もしている。(1機体ごとに必要) W orth-rc 北 秀夫 8. 不具合事例 筆者がドローンを13機、製作調整及び飛行を行なってきた中で経験した不具合事例です。 慣れによるミス、部品の初期不良、環境と考えられるものなど順次説明していきます。 ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ 最も安全とされる8ローター機の2モータ異常で右回転しながら降下。(2013年の自作機) 目視飛行中に250m付近で機体の向きが判別不可となった。 機体が山の陰に隠れる操縦をした後に機体が山に衝突。 磁気コンパス異常の発生。 GPS衛星検知感度低下による急降下。 特定場所でGPS衛星補足がランダムに変化しGPS-AUTO飛行不可。 いつもと違う地域でピルエットを行なうと数m以上の円を描いて1回転する。 3kgクラスのドローンを200mほど離して撮影中に機体を見失った。 機体側受信機の取り付け位置の問題で操縦不能。 W orth-rc 北 秀夫 8.1 不具合事例による原因説明 ① 最も安全とされる8ローター機の2モータ異常で右回転しながら降下。(2013年の自作機) 動画 原因:載せ換えを繰り返したモーターのコネクタ部の半断線。 当時の機体は廃棄したので DJI-S800の1モータ停止しての操縦確認。 Wookong-M FW:5.26。 狭い場所なのでエレベータダウンのみ操作、地上ぎりぎりで確認したが制御できている様子。 W orth-rc 北 秀夫 8.2 不具合事例による原因説明 ② 目視飛行中に250m付近で機体の向きが判別不可となった。 原因:ドローンはヘリコプターと違い離れると円に見えて機首の向きが判別しにくい。 対策:緊急時は双眼鏡で機首方向を確認する。離れても判別できる目印を機体につけておく。 (例)講師の対策は7cmの蛍光オレンジを塗ったカラーボールを後備に取り付け。 色は蛍光オレンジが最も良かった。赤、黄、緑は判別しにくかった。 ③ 機体が山の陰に隠れる操縦をした後に機体が山に衝突。(知り合いの例) 原因:山の陰によってGoHome機能が動作したが高度設定不足で衝突。 対策:常に機体が操縦者から視認できるような飛行をする。 またGoHome機能設定で十分な高度を設定しておく。 W orth-rc 北 秀夫 8.3 不具合事例による原因説明 ④ 磁気コンパス異常の発生 場所は階段の金属性手すり 機体が手すりの間にくるとコンパスエラー。 峡谷撮影での展望デッキでも起きました。 W orth-rc 北 秀夫 8.4.1 不具合事例による原因説明 ⑤ GPS衛星検知感度低下による急降下。 場所は温井ダム 山の谷間では斜面からの衛星電波が反射したことによるGPS誤動作と推定。 高度30mでATTIモードだと反応が遅れ墜落の可能性がある。マニュアルモードで回避できた。 W orth-rc 北 秀夫 8.4.2 不具合事例による原因説明 ⑤ GPS衛星検知感度低下による急降下。 急降下に対する対処例 マニュアルではスティック操作がダイレクトに機体を操作できるので対処しやすい。 GPS-ATTI、ATTIとマニュアルの相違点をヘリを使って動画で説明 (注)マニュアルモードは訓練しておかないと突発的には対処できない。 動画 W orth-rc 北 秀夫 8.4.3 不具合事例による原因説明 ⑤ GPS衛星検知感度低下による急降下。 急降下に対する反応確認 (NAZA-H マニュアルモード) スティック反応を日本遠隔制御(JR製)のエアースキッパーE8-FBL仕様ヘリコプターで動きをご覧ください。 ピッチ可変ドローンだと同様の動作が可能。 動画 W orth-rc 北 秀夫 8.5 不具合事例による原因説明 ⑥ 特定場所でGPS衛星補足がランダムに変化しGPS-ATTI飛行不可。 衛星捕捉数が8個、0個、4個と不安定。離陸地点に戻ると13個。 その後、再現性がなく原因は不明。 W orth-rc 北 秀夫 8.6 不具合事例による原因説明 ⑦ いつもと違う地域でピルエットを行なうと数m以上の円を描いて1回転する。 飛行場所の地磁気と機体データが合ってない場合に起きやすい。 飛行場所で磁気コンパスの水平垂直のキャリブレーションを行なう。 ⑧ 3kgクラスのドローンを200mほど離して撮影中に機体を見失った。 原因 : 3秒ほどモニターを見てから機体を確認しようとしたが、山と同化 して見失った。 対応策 : この様な場合は余計な操縦はせず、視線から山が見えなくなるまで 垂直上昇して空の中にあるはずの機体を確認する。 安全の観点からは、操縦者とカメラ操作者の2名で撮影する。 最終手段 : プロポSWによるGOHOMEを起動、SW起動できない場合は プロポの電源を切ってGOHOMEを起動して回収する。(DJIの例) (この処置は正しく機能するか安全な場所で事前確認が必要、 ただし衛星補足数が不足していると機能しないので注意) W orth-rc 北 秀夫 8.7 不具合事例による原因説明 ⑨ 飛行中200m離した所で180度ターンした後操縦不能。 機体への受信機の設置場所の問題で、機体が対面を向いたタイミングで受信機のアンテナ が機体の後ろ側となって操縦不能が起きた。正面では500mでも異常はなかった。 AceOneコントローラ搭載のヘリだったのでGOHOME機能で帰還した。 確 認 アンテナ取り付け位置を変更し、360度回転治具を制作して受信状態の実測確認を実施。 72MHzプロポでテーブルを45度づつ回転させながら、2.4GHzプロポでヘリのスワッシュ を動かして受信状況をチェック。 W orth-rc 北 秀夫 まずはプロポの距離テストモード(30m)での受信感度確認を実施。そして河川敷を挟んで350m 位置で実測距離テストを実施しましたが異常はなくなりました。高度10mで同一場所への飛行も正常。 また、後日500mの距離での治具による確認も正常でした。 この様に、アンテナの向きや取り付け方法によって受信感度が変わるので距離テストは重要です。 距離テスト場所 W orth-rc 北 秀夫 9 報道事例の見解 1) 群馬でのSW-S900と思われる機体の墜落炎上 2) 新幹線線路脇への100gドローン墜落 3) 高松の人口集中地区でPhantom3と思われる機体が墜落 再度違法飛行して書類送検。2回目なので罰金50万円でしょう。 TV・ラジオ報道とインターネット検索で得た情報に基づいた個人的見解です。 W orth-rc 北 秀夫 9.1 報道事例の見解 1) 群馬でのSW-S900と思われる機体の墜落炎上 事故状況:自転車ロードレースを霧雨の中で撮影中に制御不能になって墜落した様子。 墜落で白い煙が出た後に赤い炎が出て燃えている。 推定原因1:撮影に集中するあまり飛行可能時間を越えてバッテリー切れになったと推定。 カタログ上では離陸重量6.8kg、LiPo6S12000mAで18分。 推定原因2:霧雨で飛行したことによって制御系が電気的異常に陥った。 事故の目撃者の証言(突然モーター音が変わって急降下)と燃えかたから考えると推定原因1か、 早い降下でセットリング・ウイズ・パワー(ボルテック・スリング・ステイト)が起きた可能性も考えられます。 W orth-rc 北 秀夫 9.2 報道事例の見解 2) 新幹線線路脇への100gドローン墜落 事故状況:成人男性が自宅近くで飛ばしていたときに風によって制御不能になり見失った。 推定原因:このクラスのドローンは全くの初心者(小学生程度)が飛ばせるように激しい操作をしても、 初期設定では機体は少ししか動かない設定になっている。 風速2mあると制御できないが、舵角感度を中級者モードに変更すれば風に流されにくい。 トイザラスなど玩具店で ¥12,000程度。 W orth-rc 北 秀夫 9.3.1 報道事例の見解 3) 高松の人口集中地区でPhantom3が墜落 (改正航空法の施行された平成27年12月10日に発生) 事故状況:写真店経営者が卒業アルバム製作のため空撮を行なっている際に機体を見失った。 (この機体なら見失っても正しい手順で操作すれば回収できたはず) 推定原因:モニターでの撮影に集中して機体確認が疎かになった。(1オペレータ) 高度にもよるが100m付近の高度にある機体から目を放すと機体を再確認できなく なる可能性が高い。 対策1 : 操縦者とカメラ操作者の2名で行う。 対策2 : 機体から目を放すのは長くて1秒以内の一瞬にすべき。 この人は平成28年1月25日に飛行禁止区域と知りながら再度飛行して今度は書類送検された。 飲酒運転のちょっとならいいといった感覚で飛ばした様子です。絶対にやめましょう。 W orth-rc 北 秀夫 9.3.2 報道事例の見解 つづき ・ 人口集中地区の調べ方 http://www.mlit.go.jp/koku/koku_tk10_000003.htmlを開いて ・ 地図による小地域分析(jSTAT MAP) のリンクをクリックして「お試し版」を選択し飛行したい地域を指定。 ・ 【参考】 jSTAT MAPによる人口集中地区の確認方法 W orth-rc 北 秀夫 ドローン運用講習会全体を通しての質疑応答 W orth-rc 北 秀夫 正しい運用で回避可能な事故を防止しましょう。 worth-RC 北 秀夫
© Copyright 2026 Paperzz