画像化プロセスと画像ノイズ
高松 淳 !
(奈良先端科学技術大学院大学)!
"#$%&'(!)#*%+%,&-./%&-*.)0!
1"2(!340(55672789-./%&-*.)05:)#*%+%5
1
本チュートリアルのターゲット
光源
物体
レンズ
センサ
出力
2
背景
• ノイズがもたらす画像処理における悪影響
3
どうやって?
輝度値
• ノイズそのものの振る舞いの予測は難しい
時刻
t
t
出現頻度
時刻
輝度
4
画像ノイズに対する頑健化
• 統計的手法の利用
p(" X ) =
p( X ") p(")
# p( X ") p(")dx
ベイズ推定
!
事後確率最大化
X(!データセット!
;(!モデルパラメータ
ˆ =
"
# "p(" X )d"
ˆ = argmax p(" X )
"
"
!
最尤推定
ˆ = argmax p( X ")
"
"
!
5
統計的手法の適応手順
p(" X ) =
!
p( X ") p(")
# p( X ") p(")dx
X(!データセット!
;(!モデルパラメータ
<. 確率変数の関係のモデル化!
=. 個々の確率密度関数の設計
>. 全体の確率密度関数の推定!
6
確率密度関数の推定
• 小規模な問題なら解ける!
• 大規模な問題+?%9*76&@%87/!
– A6%03!9B*-!
– 信念伝搬法!
– パーティクルフィルタ!
– 隠れマルコフモデル!
7
?%9*76&@%87/:ノイズ除去の例
p(" X ) =
p( X ") p(")
# p( X ") p(")dx
X(!入力画像!
!(!ノイズ除去された画像
!
各画素は独立
i
隣合う画素同士は関連がある!
(例:滑らかさ)
!
(
p( X ") = $ p x i # i
p(") = %
i
)
% p(# ,# )
i
j
j$N ( i)
8
!
!
確率密度関数の設計
(
p( X ") = $ p x i # i
i
)
真の値に対する観測値の尤度:画像ノイズ
p(") = %
i
% p(# ,# )
i
j
j$N ( i)
画像データベースからの学習、?&"'C!7D!"E0"6*-
9
本日の内容
•
•
•
•
•
•
•
画像化プロセス!
画像化プロセスと画像ノイズモデル!
画像ノイズの取得!
レスポンス関数・FGH画像!
画像ノイズ・画像化プロセスを利用した推定!
画像ノイズからみるモデル推定手法!
おまけ!
10
画像化プロセス
11
画像化の仕組み
• フォトトランジスタによる光電効果の利用!
光の吸収にともない電子が励起される現象
基本的には
フォトトランジスタを配列上に配置し、!
光電流を取り出す機構をつければよい
IIGとIJKL
様々な波長の信号を取り出せば色情報も得られる!
>センサ、<センサ!M!デモザイキング、(?KNOKP!Q>)
12
IIGイメージセンサ
図は「IIGイメージセンサ」(=R<R年<<月25日(木)STI!<=(>U)!
『フリー百科辞典 ウィキペディア日本語版』より一部改変して引用!
13
IJKLイメージセンサ
• 一種のメモリ
図は「IJKLイメージセンサ」(=R<R年<<月25日(木)STI!<=(>8)!
『フリー百科辞典 ウィキペディア日本語版』より引用!
14
色画像の取得
• >センサーの利用(HV!AV!W)
• I?X+デモザイキング
# ! # ! #
# !
! #
! " ! " !
! "
" !
# ! # ! #
!"##$%&'(
!"##$%&')
" !
! "
! #
# !
!"##$%&'*
!"##$%&'+
! " ! " !
# ! # ! #
15
より美しく画像を見せるために
• ホワイトバランス:光源の影響をキャンセル!
Output
• カメラレスポンス関数:表現の効率化!
Input
16
画像化プロセス
<.
=.
>.
Y.
Z.
[.
U.
\.
光電効果による変換!
アンプによる信号処理!
(デモザイキング)!
ホワイトバランス!
レスポンス関数!
(信号処理)!
X5G変換!
データ圧縮!
HX]フォーマットによる出力!
6%1画像をさわろう
• C96%1を使えば中身に触れる!
http://www.cybercom.net/~dcoffin/dcraw/
• デモザイキングアルゴリズムとしてW&'&/"%6、NPA、
^^A、XFGが実装されている!_#`!aR!b!>cd!
• <[2&*で'&/"%6!IH?で吐き出してくれる!_#Yd!
• I?Xパターンもわかる!
18
画像化プロセスと画像ノイズ
19
画像化プロセスと画像ノイズ
<.
=.
>.
Y.
Z.
[.
U.
\.
光電効果による変換!
アンプによる信号処理!
(デモザイキング)!
ホワイトバランス!
レスポンス関数!
(信号処理)!
X5G変換!
データ圧縮!
ノイズの発生源!
ノイズの特性の変換!
20
時間的な問題によるノイズ
– モーションブラー:シャッター開放中に環境が動く
ことによって生じる!
– ローリングシャッター現象(IJKL):ピクセルごと
に露光のタイミングが異なる!
21
ハードウエアに起因するノイズ
• ブルーミング!
– 他画素への電荷の混入!
• スミア!
– 転送IIGへの電荷の混入!
余り考慮されることはない?!
せいぜいアウトライヤー扱い!
図は「スミア」(=R<R年<<月=e日(月)STI!e(=U)!
『フリー百科辞典 ウィキペディア日本語版』より引用!
22
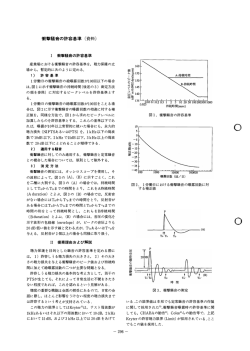
光電効果・素子における画像ノイズ
• フォトン・エレクトロンショットノイズ!
– 光・電子の粒子性にともなうノイズ!
ポアソン分布で仮定される! 平均・分散は輝度に依存する!
• 暗電流ショットノイズ!
– 熱による電子の励起!
平均・分散は温度や!
ポアソン分布で仮定される!
露光時間に依存する!
• 読み出しノイズ!
正規分布で仮定される!
23
画像ノイズの定式化
I = A( I˜ + N s + N DC + N R )
!
!
! I(!観測値!
!!!!!!(!真の観測値(N
Sの分散が0になるように定める) ˜I
!!!!A(!ゲイン!
NS(!フォトン・エレクトロンショットノイズ!
NDC(!暗電流ショットノイズ!!
NR(!読み出しノイズ!
レスポンス関数と量子化が加わると!
I = f A( I˜ + N s + N DC + N R ) + NQ
(
)
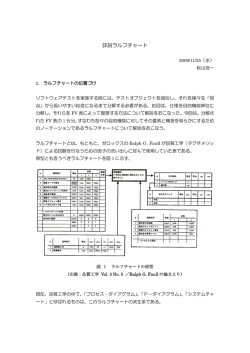
Glenn E. Healey and Raghava Kondepudy, “Radiometric CCD Camera Calibration and
Noise Estimation”, PAMI, Vol. 16, No. 3, pp. 267-274, 1994
24
画像ノイズの平均・分散
I = A( I˜ + N s + N DC + N R )
ノイズの独立性を仮定!
!
I = AtP + AtE ( N DC )
2
" 2 = A 2 tP + A 2 t"DC
+ A 2"R2
暗電流ノイズの影響が少ないと仮定!
76!!!!!!を暗電流ノイズも含めて定義!
!
!
" 2 = sI˜ + t
25
!
実際の例
• ^7&/*!A6"f!G6%g7/hf!H#I3%//"'
26
波長に関するノイズ特性
• HAW間のノイズは独立である!
• (経験的には)HAW間ではノイズの大きさは異
なる!
波長によって分光感度特性が変わり、!
結果としてゲインが変わるため?!
27
色恒常性・色度・画像ノイズ
• HAW空間ではノイズ分布は単純化できる!
線形なレスポンス関数なら" = sI˜ + t
2
• 色度空間だと非線形な変換が加わる
IR
IB
" IR %
p$ ' =
# IB &
!
(
"K %
IR
p( I ) p$ 'dI, K =
#I&
IB
非線形変換 f(x) = 1/x
!
!
28
空間に関するノイズ特性
• 転送劣化!_IIGd!
• 画素ごとに素子の不均一性がある!_IJKLd
IIGに比べIJKLのほうが不均一性が大きい!
暗いところでは暗電流ショットノイズの不均一性が大きい!
29
画像化プロセスと画像ノイズ
<.
=.
>.
Y.
Z.
[.
U.
\.
光電効果による変換!
アンプによる信号処理!
(デモザイキング)!
ホワイトバランス!
レスポンス関数!
(信号処理)!
X5G変換!
データ圧縮!
ノイズの発生源!
ノイズの特性の変換!
デモザイキングと画像ノイズ
• 変化の仕方は補間の仕方による
"I2 (i) = $ w j"O2 ( j ) 空間的なノイズの独立性を仮定!
j#N ( i)
補間画素の分散は小さくなる傾向がある!
!
# ! # ! #
# !
! " ! " !
! "
# ! # ! #
!"##$%&'(
" !
! " ! " !
! #
# ! # ! #
Jun Takamatsu, Yasuyuki Matsushita, Tsukasa Ogasawara and Katsushi Ikeuchi,
“Estimating demosaicing algorithms using image noise variance”, CVPR, 2010
!"##$%&'*
31
レスポンス関数
ノイズに関する確率密度関数が分かっていれば!
O = f ( I ) であるとき! p(O) = p( I ) f ' ( I )
元々の分散はそれほど大きくない!
レスポンス関数はなめらか!
!
!
"O2 # ( f ' ( I )) "I2
2
2
O
" =
2
$ (I # µ ) p(I I˜)dI をテーラー展開することで得られる!
O
!
Jun Takamatsu, Yasuyuki Matsushita and Katsushi Ikeuchi, “Estimating radiometric
response functions from image noise variance”, ECCV, 2008
!
32
X5G変換
• 離散化誤差が発生
[ai ,bi ) "i # Z
誤差を一様分布で仮定!
!
2
q
"O2 = "I2 +
12
離散化誤差の分散!
!
"Q 2 =
*
q
2
q
)
2
q
2
3&
2
#
1
1
x
q
x 2 dx = % ( =
q
q $ 3 ' ) q 12
2
33
画像圧縮
• ほとんどわからないi!
– j^OA圧縮の場合\E\のブロックが見える
34
画像ノイズの取得
35
画像ノイズの取得法
• (理論的には)同一信号源を同一方法で複数
観測する必要がある!
静的なシーンをパラメータ固定で複数回撮影!
36
単純な取得法
• (できるかぎり余分な信号処理は追加しない)!
• 固定パターンノイズがないものと仮定!
• 最頻値を真値とみなす!
• 画像全体でまとめる
37
実際の例
• ^7&/*!A6"f!G6%g7/hf!H#I3%//"'!(<RRフレーム)
38
まじめに測定
• 線形なレスポンス関数を仮定!
• 量子化も等間隔であると仮定!
I (p) = A(K (p) I˜ (p) + N s (p) + N DC (p) + N R ) + NQ
• 同一パラメータの2枚の画像の差分
!
!
(
)
画像全体の輝度の平均! µ = A( I + E ( N
"N2 (p) # A 2 I + E ( N DC (p)) + "C2
2
2
q
"C2 = A 2"R2 +
12
DC
)
(p))
"N (p) !
"C
差分画像の分散から を推定kXと が推定できる!
2
Glenn E. Healey and Raghava Kondepudy, “Radiometric CCD Camera Calibration and
Noise Estimation”, PAMI, Vol. 16, No. 3, pp. 267-274, 1994
!
39
まじめに測定
• 真っ黒なシーンを複数回撮影!
I (p) = A( N DC (p) + N R ) + NQ
(
)
(
)
複数枚画像の平均! E I (p) = AE N DC (p)
!
• 複数撮影条件下で複数枚撮影、平均化!
!
E ( Ii (p)) = A K (p) I˜i (p) + E ( N DC (p))
(
(
)
)
E N DC (p)
すでに は分かっている!
!
40
実際に測定
• P&+7/!G>L!lLK!\RR、シャッタースピード!<5ZR!
– C96%1!b3!#Y!で現像!
– 97/m"6*!#C"0*3!\で\2&*化!
X
n9=
!
R.RUe
R.=>
"
R.R<Y
R.R><
#
R.RRee
R.<\
# ! # ! #
#
! " ! " !
!
# ! # ! #
! " ! " !
# ! # ! #
41
!"##
"
!
!"##
実際に計測
• 固定パターン_ZRRR倍にスケールアップd
平均
分散
!
R.eeeZ
R.R>=<
"
R.eeeZ
R.R><[
#
R.eeeZ
R.R><e
IIGより固定パターンの影響は<R倍は大きい
42
実際に測定
• 暗電流ノイズ(シャッター速度1秒、1000倍にス
ケールアップ)
!
平均
R.R[\
標準偏差<.<
"
R.R<R
R.>Y
#
R.R<Z
R.YU
43
単一画像からのノイズ推定
• 均質な表面からの推定!
• ノイズ除去≒ノイズ推定と考える!
44
ノイズ除去手法概要
• 局所平滑化フィルター!
– ガウシアン平滑化!
– 異方性フィルタ!
– T7*%'!N%6&%87/!
輝度変化に依存する!
• 周波数領域フィルタ!
– ]&"/"6!?&'*"6!
– ]%m"'"*!T36"-37'C&/g!
• P7/#'79%'!_Po#$"%/-V!OE%$0'"ベースV!WJ>Gd!
A. Buades, B. Coll, and J. M. Morel, “A review of image denoising algorithms, with a new
45
one”, Multiscale Modeling and Simulation, Vol. 4, No. 2, pp. 490-530, 2005.
ガウシアン平滑化
ノイズ除去前!
ノイズ除去後!
差分画像!
エッジ抽出に近い結果が出ている!
46
P7/!o79%'な手法
• 画像中に自己相似性が観測される
Kostadin Dabov, Alessandro Foi, Vladimir Katkovnik, and Karen Egiazarian,“Image Denoising
by Sparse 3D Transform-domain Collaborative Filtering”, IEEE Trans on Image Processing,
Vol. 16, No. pp. 2080-2095, 2007
47
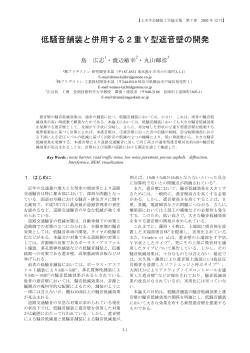
試してみる
• G6%g7/hf!H#I3%//"'V!WJ>Gを使用
6
x 10
-5
5
4
3
2
1
0
0
0.2
0.4
0.6
0.8
1
48
ノイズ推定:レスポンス関数とノイズ
• レスポンス関数のデータベースを利用して!
!ノイズレベル関数を低次元化!
Ce Liu, William T. Freeman, Richard Szeliski and Sing Bing Kang, “Noise Estimation
from a Single Image”, CVPR, 2006.
49
レスポンス関数の取得
50
レスポンス関数の測り方
• 露光時間を変えて撮影した画像を利用
(
)
I = At P + E ( N DC )
露光時間が倍kレスポンス関数への入力が倍!
!
露光時間を変えて同一信号を2回観測!
(
)
g(O ) = At ( P + E ( N ))
g(O1 ) = At1 P + E ( N DC )
2
2
g(O1 )
g(O2 )
DC
t1
=
t2
51
!
レスポンス関数の表現法
•
•
•
•
•
ガンマ補正!
ガンマ補正+正規化! f ( I) = "I# + $
P ( I ,{" })
i
f
I
=
I
,P
I,
"
=
"
I
(
)
{ i}) # i
一般化ガンマ補正!
(
i=0
!
i
f
I
=
w
I
() " i
多項式表現!
i=1
!
^6&76!M!^IXによる次元圧縮!
f ( I ) = I"
i
http://www.cs.columbia.edu/CAVE/software/softlib/dorf.php
!
!
• ノンパラメトリック(滑らかさ拘束とセット)
52
レスポンス関数の測り方
• カラーチェッカーの利用
一様な光源で照らされている!
口径食(N&g/"p/g)の影響も除去されている!
表面反射率の比が入力の比に等しい
光学密度(K089%'!C"/-&*f)から表面反射率への変換!
"
%
1
Optical density = log10 $
'
# Light Transmission &
1
Light Transmission =
pow(10, Optical density)
!
53
FGH画像と画像ノイズ
図は「ハイダイナミックレンジ合成」(=R<R年<<月=e日(月)STI!e(YR)『フリー百科辞典 ウィキペディア日本語版』より引用!
レスポンス関数の推定では、オフセットに意味はない。
I = At P + E N DC
HDRを作成する場合はオフセットも重要な意味を持つ。
(
(
))
ゲインを制御することでも同じ効果が得られるが、 桁あふれしてない場合
ノイズ的には性質は異なる。
t 2P 2
2
SNR =
!
1
2
2
2
2
2 2
2
2
" = A tP + A t"DC + A "R + "Q
tP + t"DC
+ "R2 + 2 "Q2
A
Samuel W. Hasinoff, Fredo Durand and William T. Freeman, “Noise-Optimal Capture for
High Dynamic Range Photography”, CVPR, 2010.
!
54
ノイズ除去とブラー除去
• 高ゲイン・短シャッタ速度で複数枚撮影し、
ノイズ除去をしたほうが有利
Li Zhang, Alok Deshpande and Xin Chen, Denoising vs. Deblurring: HDR
Imaging Techniques Using Moving Camera, CVPR, 2010
55
画像ノイズからの推定$
%$情報としての画像ノイズ$%
56
別の側面:情報としてのノイズ
• 熱雑音:抵抗体内の電子の不規則な熱振動
によって生じる雑音
Vn = 4kTR"f
! k(!ボルツマン定数!
"f(!帯域幅aF@c!!
!!T(!導体の温度!
!!R(!抵抗値!
!
57
画像ノイズの場合
• 単一ピクセルのHX]データにはほしい情報は
ない?
2
" 2 = A 2 tP + A 2 t"DC
+ A 2"R2
それ以降に加えられる変更は?!
!
デモザイキング、ホワイトバランス、レスポンス関数、!
信号処理、X5G変換、データ圧縮i!
58
カメラレスポンス関数の推定
• 入力空間でのノイズ分布の対称性を仮定!
Yasuyuki Matsushita and Stephen Lin, “Radiometric Calibration from Noise Distributions”,
CVPR, 2007.
59
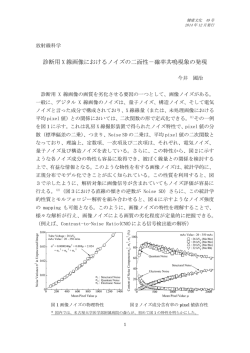
カメラレスポンス関数の推定
• 入力空間でのノイズ分散のアフィン性の利用!
Observation#
Input
Input#
Output#
Inverse response g!
Noise variance#
Radiometric Calibration#
Input#
Response f!
Noise variance#
Noise variance#
Output#
Imaging process#
Output#
Jun Takamatsu, Yasuyuki Matsushita and Katsushi Ikeuchi, “Estimating radiometric
response functions from image noise variance”, ECCV, 2008
Input#
デモザイキングアルゴリズムの推定
• ノイズの分散からI?Xパターンがわかる!
• I?Xパターンがわかれば補間方法がわかる
Jun Takamatsu, Yasuyuki Matsushita, Tsukasa Ogasawara and Katsushi Ikeuchi,
“Estimating demosaicing algorithms using image noise variance”, CVPR, 2010
61
画像化プロセスを利用した推定$
%$&'()!'*$+'(,!-'!.として%$
62
改ざん検出への応用
• IH?の不一致の利用!
• デモザイキングの仕方!
• 固定パターンノイズの違い!
• ノイズレベル関数の違い!
63
IH?の利用
• 画像の補間のされ方を推定!
– 輝度変化が平面的な部分を利用!
"1
f
''
f
R
R
( (R))
Rxx
xy
yy
Rx
2
=
Rx Ry
=
Ry
2
=
f '( f
2
(R))
– エッジ周辺の色の混合を利用
"1
!
Yu-Feng Hsu and Shih-Fu Chang, “Image Splicing Detection using Camera Response Function
Consistency and Automatic Segmentation”, Int. Conf. on Multimedia Expo., pp. 28- 31, 2007
Zhouchen Lin, Rongrong Wang, Xiaoou Tang and Heung-Yeung Shum, “Detecting Doctored
64
Images Using Camera Response Normality and Consistency”, CVPR, 2005
デモザイキングの利用
• デモザイキングを補間処理とみなす!
!!kOJによる補間フィルターの推定
Alin C. Popescu and Hany Farid, Exposing Digital Forgeries in Color Filter Array Interpolated
Images, IEEE Transactions on Signal Processing, Vol. 52, No. 10, pp. 3948—3959, 2005 65
固定パターンの利用
• あらかじめ固定パターンを測っておく!
• 単一画像より固定パターンノイズを推定!
– G%B2"93&"-!1%m"'"*ベースのノイズ除去を利用!
Jan Lukas, Jessica Fridrich and Miroslav Goljan, Digital Camera Identification from Sensor Pattern
Noise”, IEEE Trans. on Information Forensics and Security, Vol. 1, No. 2, pp. 205-214, 2006.
Mo Chen, Jessica Fridrich, Miroslav Goljan and Jan Lukas, Determining Image Origin and
Integrity Using Sensor Noise”, IEEE Trans. on Information Forensics and Security, Vol. 3, No. 1,
pp. 74-90, 2008.
66
ノイズレベル関数の違い
• ノイズレベル関数の^IX表現を利用した推定!
• 動画中のノイズレベル関数の不一致を検出
小林,岡部,佐藤,”複数のノイズレベル関数の同時推定による映像改ざん
検出”, MIRU 2010
67
ノイズから見るモデル推定
68
最小二乗法
• 観測値と推定値の差の二乗和を最小化
"ˆ = argmin $ y i # f ( x i ;" )
"
i
(
)
2
特徴!
!
• モデル式が線形の場合、高々線形方程式をとけば良い!
• 評価関数が微分可能k勾配ベースの最適化が使える!
• 正規分布をノイズとするデータとの親和性
69
最小二乗法とノイズ
• ノイズを正規分布と仮定し、最大化!
& y % f (x ))
i
i
(
++
p y i x i ," =
exp(
2
2
2#$
' 2$
*
(
y = f (x;" ) + e
!
(
) (
)
)
p " { x i },{ y i } = p { y i } { x i }," = ,
!
i
(
)
(
1
&
% yi % f ( xi )
1
(
exp
2
2
(
2
$
2#$
'
(
)
)
2
)
+
+
*
2
"log p { y i } { x i },# = $ y i " f ( x i ) + const
!
i
70
モデル化とデータ圧縮
• モデル化=より少ない情報でデータを表現!
• ノイズ=モデルとは独立に存在するもの!
!! ! ! !kモデル化により軽減される!
周波数領域フィルタがうまく!
ノイズ除去できる(であろう)根拠!
71
最小二乗法に基づくデータ圧縮
• 主成分分析!
– ユークリッド距離をできるだけ保存しつつ圧縮!
• 特異値分解+低次元化!
– フロベニウスノルムを最小化しつつ圧縮!
A
F
=
"" a
i
!
2
ij
j
72
最小二乗法と外れ値
• 外れ値:母集団の分布に従わない点
J#"-8$%*76V!HXPLXI!
図は「HXPLXI」(=R<R年<<月=e日(月)STI!<R(RZ)!
『フリー百科辞典 ウィキペディア英語版』より引用!
73
種々のノルム
• o0#ノルム
x
x
p
#n
&
p
= %" x i (
$ i=1
'
= max( x1 ,…, x n )
"
!
!
!
2
x 2 = x1 + ! + x n
x1 + ! + x n
x1=
x 0 = $1 " # ( x i )
!
i
2
最悪の場合を最適化、データフィッティング
線形計画法
最適化が容易、剛体変換に不変
線形方程式、勾配ベースの最適化…
スパースネスの尺度の近似
L1-Lasso, Fixed point algorithm 外れ値に頑健!
Rでない要素の数(スパースネス)
Marching pursuit
74
ロバストなデータ圧縮
• 低次元化+誤差項のスパースネス!
– G(!各列が1つのデータに対応 !
min rank ( A) + " E
0
s.t. D = A + E
問題のo<#6"'%E%87/
!
min A * + " E
1
s.t. D = A + E
固有値の絶対値の和
!
John Wright, Arvind Ganesh, Shankar Rao, Yigang Peng, and Yi Ma, “Robust principal
component analysis: exact recovery of corrupted low-rank matrices via convex
optimization”, NIPS, 2009
75
ノルム最小化とノイズ
• o=ノルム!
– ノイズを正規分布と仮定!
• o0ノルム!
– ノイズを一般化正規分布で仮定!
p
% %
( (
x
+
µ
"
p( x ) =
exp' +'
* *
' & # ) *
% (
2#$' 1 "*
&
)
& )
そもそもノイズが一般化正規分布に従うといえる理由は?
• oRノルム!
!
– ???
スパース表現、I7$06"--"C!-"/-&/gi!
kノイズの性質が入る要素がない?
76
おまけ
77
おまけ:ノイズと到達運動
• 人間らしいリーチング動作!
– 躍度最小化!
– トルク変化最小化!
– 終点分散最小化!(!生体ノイズを考慮した上で到
達位置の誤差を最小化する
生体ノイズの分散もシグナルの大きさに依存
Christopher M. Harris and Daniel M. Wolpert, “Signal-dependent noise determines
motor planning”, Nature, Vol. 394, pp. 780-784, 1998.
78
まとめ
•
•
•
•
•
画像化プロセスと画像ノイズモデル!
画像ノイズの取得!
レスポンス関数・FGH画像!
画像ノイズ・画像化プロセスを利用した推定!
画像ノイズからみるモデル推定手法!
79
(個人的な)疑問
• ノイズのモデリングとoRV!o<ノルム最小化との
関係は?
80
T3%/+!f7B!D76!f7B6!+&/C!%4"/87/q
81
© Copyright 2026 Paperzz