赤外線位置天文観測衛星 (JASMINE)計画
第1回検討報告書
∼Japan Astrometry Satellite Mission for INfrared
Exploration∼
—Galactic Structure Surveyor—
JASMINE チーム
http://www.jasmine-galaxy.org/index-j.html
2003 年 7 月
2
3
目次
第0章
JASMINE 計画の概要
13
第1章
序章
15
1.1
銀河系を知る意味
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
1.2
位置天文観測の発展 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
1.3
高精度アストロメトリの時代へ . . . . . . . . . . . . . . . . . . . . . .
18
1.4
スペースアストロメトリ計画と VERA 計画 . . . . . . . . . . . . . . . .
21
1.5
近赤外線スペースアストロメトリ計画の必要性 . . . . . . . . . . . . . .
21
1.6
この報告書について . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
海外計画の紹介と JASMINE の位置づけ
23
2.1
海外計画の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.2
GAIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.3
SIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
2.4
その他の参考事項
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
2.5
JASMINE 計画の位置づけ
. . . . . . . . . . . . . . . . . . . . . . . .
27
第3章
JASMINE で拓くサイエンス
29
3.1
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
3.2
銀河系の力学構造と形成史 . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.3
星形成と恒星物理
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
3.4
年周視差に関するバイアスについて . . . . . . . . . . . . . . . . . . . .
63
3.5
Astrometric Microlens . . . . . . . . . . . . . . . . . . . . . . . . . .
71
3.6
系外惑星探査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
3.7
赤外線天体の基準座標系 . . . . . . . . . . . . . . . . . . . . . . . . . .
90
JASMINE システムの検討概要
91
位置天文観測の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
第2章
第4章
4.1
4
目次
4.2
JASMINE の仕様概要 . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
4.3
サイエンスからの要求 . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
第5章
望遠鏡・検出器の仕様と課題
101
5.1
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.2
光学系デザイン . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.3
超軽量鏡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.4
焦点面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.5
検出器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.6
ビーム混合鏡と basic angle . . . . . . . . . . . . . . . . . . . . . . . . 122
第6章
衛星システム
125
6.1
概要(衛星全体のデザイン、打ち上げロケットなど) . . . . . . . . . . . 125
6.2
熱構造体(構体系、熱制御系など) . . . . . . . . . . . . . . . . . . . . 129
6.3
衛星姿勢と軌道 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
6.4
通信、電力、重量
第7章
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
位置天文情報の精度評価
143
7.1
精度評価 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
7.2
星像中心決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
7.3
ビーム混合鏡と Basic Angle について . . . . . . . . . . . . . . . . . . . 155
7.4
相対論的補正 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
7.5
アストロメトリーパラメータの精度 . . . . . . . . . . . . . . . . . . . . 163
7.6
連星系の問題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
第8章
データ解析方法
169
第9章
JASMINE シミュレーター
171
9.1
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
9.2
ガイドライン . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
9.3
要求定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
9.4
分析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
9.5
設計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
9.6
動作例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
9.7
補足 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
第 10 章
今までの経緯と今後のスケジュール、マイルストーン
205
5
目次
10.1
今までの経緯 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
10.2
Mini-JASMINE 計画について . . . . . . . . . . . . . . . . . . . . . . . 206
10.3
今後のスケジュールとマイルストーン . . . . . . . . . . . . . . . . . . . 209
第 11 章
予算概要
211
第 12 章
体制の現状
213
第 13 章
Summary
221
13.1
JASMINE のまとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
13.2
今後について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
13.3
謝辞 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
付録 A
JASMINE 仕様の計算方法
227
付録 B
銀河系モデルの概要
235
付録 C
Astrometry における source confusion limit
239
付録 D
ベーシックアングル補足
243
付録 E
関連する情報技術について
245
E.1
簡単なオブジェクト指向ソフトウェア開発 . . . . . . . . . . . . . . . . 246
E.2
Object 指向プログラミング . . . . . . . . . . . . . . . . . . . . . . . . 251
E.3
開発工程と UML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
E.4
設計例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
E.5
Gang of Four のパターンリスト
E.6
その他の情報技術
E.7
情報用語一覧 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
E.8
実行・開発環境の入手と整備
. . . . . . . . . . . . . . . . . . . . . . . 296
距離決定の手法と観測の現状
303
F.1
位置天文学におけるバイアス
. . . . . . . . . . . . . . . . . . . . . . . 303
F.2
Cepheid の PL 関係と µLM C の決定の現状 . . . . . . . . . . . . . . . . 308
F.3
疑似データの作成方法と解析手法の改良 . . . . . . . . . . . . . . . . . . 312
付録 F
. . . . . . . . . . . . . . . . . . . . . 273
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
付録 G
登録商標等について
319
付録 H
執筆者一覧
321
7
図目次
1.1
アストロメトリ観測で高精度情報が得られる銀河系の範囲 . . . . . . . . .
19
2.1
HIPPARCOS で観測された変光星 . . . . . . . . . . . . . . . . . . . . .
26
3.1
位相 χ と epicyclic phase φ の銀河面上での図 . . . . . . . . . . . . . . .
36
2
3.2
誤差 2 乗和 ∆ をアームの本数 m をパラメータとして表した図。 . . . . .
37
3.3
LMC 有・無の場合の warp の励起 . . . . . . . . . . . . . . . . . . . . .
39
3.4
LMC を重くした場合・粒子数を減らした場合の warp の励起 . . . . . . .
40
3.5
歳差運動に伴う z 方向の速度成分 . . . . . . . . . . . . . . . . . . . . . .
41
3.6
力学的摩擦による LMC の軌道進化。 . . . . . . . . . . . . . . . . . . .
44
3.7
解析的な力学的摩擦を使った軌道進化と N 体計算の比較。 . . . . . . . .
45
3.8
ハロー、thick disk、thin disk に属する星々の金属量の進化
. . . . . . .
53
3.9
さまざまな星形成領域における観測された α の分布。 . . . . . . . . . . .
55
3.10 星の数が減少したときの初期質量関数の揺らぎ。 . . . . . . . . . . . . .
56
3.11 星の数が減少したときの α の揺らぎ。 . . . . . . . . . . . . . . . . . . .
57
3.12 MJ − (J − K) diagram
. . . . . . . . . . . . . . . . . . . . . . . . . .
63
3.13 Ratnatunga 法とその改良法での解析結果の比較 . . . . . . . . . . . . . .
67
3.14 改良 Ratnatunga 法での解析結果と Feast らの方法との比較 . . . . . . .
68
3.15 より高精度の観測におけるバイアス。 . . . . . . . . . . . . . . . . . . .
69
3.16 マイクロ重力レンズによる星像中心位置の変化 . . . . . . . . . . . . . . .
74
3.17 マイクロ重力レンズイベント検出効率のシミュレーションの結果 . . . . .
76
3.18 レンズ天体と光源の位置及び+像、−像、その重心の軌道。 . . . . . . . .
79
3.19 重心 (太線) と+像 (破線) の軌道と各点での時間。 . . . . . . . . . . . . .
79
3.20 θcrit± の u0 依存性とタイプ A、B、C の分類。 . . . . . . . . . . . . . .
80
3.21 タイプ A、B、C の (θx , θy ) の時間依存性。 . . . . . . . . . . . . . . . .
80
3.22 タイプ A、B、C の軌道。
. . . . . . . . . . . . . . . . . . . . . . . . .
80
3.23 3 種のレンズ天体の諸量 . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
8
図目次
3.24 3 種のレンズ天体の諸量 . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
3.25 プラズマレンズモデルの概念図。 . . . . . . . . . . . . . . . . . . . . . .
86
4.1
期待される星の個数を太陽系からの距離の関数で示したもの . . . . . . . .
96
4.2
タイプ別の星の個数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
4.3
anticenter 方向での期待される星の個数 . . . . . . . . . . . . . . . . . .
98
4.4
K-band における銀河中心方向での confusion limit による限界等級。 . .
99
4.5
z-band における銀河中心方向での confusion limit による限界等級。 . . .
99
5.1
JASMIE 光学系の全体模式図 . . . . . . . . . . . . . . . . . . . . . . . . 103
5.2
JASMIE 光学系 Layout(Korsh 系) . . . . . . . . . . . . . . . . . . 104
5.3
JASMINE 光学系のスポットダイヤグラム . . . . . . . . . . . . . . . . . 104
5.4
スポットサイズの視野依存性 . . . . . . . . . . . . . . . . . . . . . . . . 106
5.5
RMS Wavefront error . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.6
Curvature と Distortion . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.7
Grid Distortion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.8
Encircled Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.9
フーコーテストパターン . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.10 ビーム混合鏡を除いた光学系の PSF . . . . . . . . . . . . . . . . . . . . 110
5.11 フーコーテストパターン(一つの領域に対する開口形状) . . . . . . . . . 110
5.12 ビーム混合鏡の形状を考慮した PSF . . . . . . . . . . . . . . . . . . . . 111
5.13 超精密旋盤 (東芝 Web ページより転載) . . . . . . . . . . . . . . . . . . . 115
5.14 プラズマを生成してレンズを加工する (画像提供 株式会社ニコン) . . . . . 115
5.15 GCIB の基本動作原理 (山田公京都大学名誉教授による) . . . . . . . . . . 116
5.16 CCD の感度曲線 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.17 JASMINE 概観 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
5.18 光学系部分とビーム混合鏡 . . . . . . . . . . . . . . . . . . . . . . . . . 124
6.1
H-IIA フェアリングの様々なオプション (出展 NASDA ホームページ) . . 127
6.2
JASMINE の H-IIA フェアリング収納時の様子 . . . . . . . . . . . . . . 128
6.3
JASMINE 遮蔽板展開時の様子 . . . . . . . . . . . . . . . . . . . . . . . 128
6.4
振動数毎の許容振幅のまとめ図 . . . . . . . . . . . . . . . . . . . . . . . 132
6.5
銀河面と黄道面との関係及び、衛星、地球、太陽の位置関係 . . . . . . . . 135
6.6
熱構造解析のための要素配置図 . . . . . . . . . . . . . . . . . . . . . . . 136
6.7
サーベイ方法の図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
9
図目次
7.1
精度の評価 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
7.2
実験装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
7.3
実験装置コンフィグレーション . . . . . . . . . . . . . . . . . . . . . . . 149
7.4
星1の座標に対する 2 つの星の見積もられた相対的距離 . . . . . . . . . . 150
7.5
星1の座標に対する 2 つの星の見積もられた相対的距離の拡大図 . . . . . 151
7.6
相対的距離測定値の分布 . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
7.7
縮退モードの割合(値が大きい程、不適格) . . . . . . . . . . . . . . . . 159
7.8
観測精度の見積もり . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
7.9
銀緯に対する σ(s)/σ(0), σ⊥ (s)/σ⊥ (0) . . . . . . . . . . . . . . . . . . . 166
8.1
データ解析の流れ図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
9.1
JASMINE シミュレーターの仕様 . . . . . . . . . . . . . . . . . . . . . . 180
9.2
JASMINE シミュレーターのユースケース図 . . . . . . . . . . . . . . . . 181
9.3
データの流れ
9.4
データの流れ詳細 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
9.5
UI パートのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
9.6
ファイル出力部分のクラス図 . . . . . . . . . . . . . . . . . . . . . . . . 188
9.7
描画部分のクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
9.8
宇宙モデルのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
9.9
観測モデルのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
9.10 観測装置のクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
9.11 解析アルゴリズムのカプセル化 . . . . . . . . . . . . . . . . . . . . . . . 196
9.12 衛星モデルのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
9.13 誤差の取扱方法を示すクラス図 . . . . . . . . . . . . . . . . . . . . . . . 199
9.14 JASMINE シミュレーターの動作例1 . . . . . . . . . . . . . . . . . . . 201
9.15 JASMINE シミュレーターの動作例2 . . . . . . . . . . . . . . . . . . . 202
9.16 JASMINE シミュレーターの編集機能 . . . . . . . . . . . . . . . . . . . 203
12.1 JASMINE 組織表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
B.1 予想される星の個数の観測結果とモデルの比較 . . . . . . . . . . . . . . . 238
C.1 K バンドとzバンドの見かけの等級に対する期待される星の数。 . . . . . 241
C.2 JASMINE PSF と Gaussian PSF での s/b のグラフ . . . . . . . . . . . 241
E.1 ユースケース図の書き方 . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
10
図目次
E.2 class 図の書き方 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
E.3 class の関係の表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
E.4 ステートチャートの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
E.5 アクティビティー図の例 . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
E.6 シーケンス図の例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
E.7 コラボレーション図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
E.8 コンポーネント図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
E.9 配置図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
E.10 例題の要求定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
E.11 電話器クラスの状態遷移図 . . . . . . . . . . . . . . . . . . . . . . . . . 268
E.12 電話交換システムのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . 269
E.13 電話交換システムのコードスケルトン . . . . . . . . . . . . . . . . . . . 270
E.14 電話網システムの拡張 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
E.15 電話網システムの拡張2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
E.16 AbstractFactory パターンのクラス図 . . . . . . . . . . . . . . . . . . . 275
E.17 Builder パターンのクラス図とシーケンス図 . . . . . . . . . . . . . . . . 276
E.18 Prototype パターンのクラス図 . . . . . . . . . . . . . . . . . . . . . . . 277
E.19 Singleton パターンのクラス図 . . . . . . . . . . . . . . . . . . . . . . . 277
E.20 Adapter パターンのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . 278
E.21 Bridge パターンのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . 279
E.22 Composite パターンのクラス図とオブジェクト図 . . . . . . . . . . . . . 280
E.23 Decorator パターンのクラス図とオブジェクト図 . . . . . . . . . . . . . . 281
E.24 Chain of Responsibility パターンのクラス図とオブジェクト図 . . . . . . 284
E.25 Command パターンのクラス図とシーケンス図
. . . . . . . . . . . . . . 285
E.26 Strategy パターンのクラス図 . . . . . . . . . . . . . . . . . . . . . . . . 287
F.1 Malmquist Bias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
F.2 合成データの特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
F.3 Lutz Kelker bias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
F.4 2000 個の sinthetic data に対する様々な値の分布 . . . . . . . . . . . . . 309
F.5 LMC 距離評価の一覧 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
F.6 HIPPARCOS Cepheids の σπ /πobs 分布 . . . . . . . . . . . . . . . . . . 312
F.7 HIPPARCOS の δ Cepheid 250 個の周期 P の分布。 . . . . . . . . . . . 314
F.8 HIPPARCOS および DIVA における、実視等級と σπ の関係 . . . . . . . 316
11
表目次
2.1
欧米のスペースアストロメトリ計画との比較表 . . . . . . . . . . . . . . .
24
3.1
星の大気モデルの fundamental parameters . . . . . . . . . . . . . . . .
52
3.2
2 つの星における化学組成比 . . . . . . . . . . . . . . . . . . . . . . . .
53
3.3
[Lawrence, 2001] による制限と [Kamaya and Silk, 2002] の結果 . . . . .
87
5.1
SURFACE DATA SUMMARY . . . . . . . . . . . . . . . . . . . . . . 105
6.1
時間スケール毎の要求精度 . . . . . . . . . . . . . . . . . . . . . . . . . 129
6.2
振動、変動で星像がボケないための振動数毎の許容振幅 . . . . . . . . . . 130
6.3
星像中心決定を要求精度出すための振動数毎の許容振幅 . . . . . . . . . . 131
6.4
許容誤差見積もり表 (z-band, Korsh 系) . . . . . . . . . . . . . . . . . . 132
6.5
JASMINE 要素 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
7.1
ICX085AL の仕様 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
7.2
CCD55 の仕様 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
7.3
ベーシックアングルに適する角度 (データ 2 周および 3 周)
. . . . . . . . 157
7.4
ベーシックアングルに適する角度 (データ 4 周および 5 周)
. . . . . . . . 158
7.5
観測年数、回数による精度依存性 . . . . . . . . . . . . . . . . . . . . . . 168
9.1
より抽象度の高いモデルの分類 . . . . . . . . . . . . . . . . . . . . . . . 184
9.2
JASMINE シミュレーターのソフトウエア階層構造 . . . . . . . . . . . . 190
10.1 JASMINE 計画の今後のスケジュールとマイルストーン . . . . . . . . . . 210
12.1 JASMINE 組織と WG . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
12.2 ワーキンググループ組織表 . . . . . . . . . . . . . . . . . . . . . . . . . 218
12.3 勉強会組織表
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
12
表目次
13.1 JASMINE 早見表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
B.1 arm のパラメーター . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
E.1 従来言語のオブジェクト指向対応 . . . . . . . . . . . . . . . . . . . . . . 254
E.2 ビューと UML 図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
E.3 電話器がとり得る状態 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
E.4 Java 実行環境と開発環境の入手方法 . . . . . . . . . . . . . . . . . . . . 297
E.5 各種ソフトウエアの入手先 . . . . . . . . . . . . . . . . . . . . . . . . . 298
F.1 Lutz Kelker バイアスによる絶対等級の誤差 . . . . . . . . . . . . . . . . 307
F.2 HIPPARCOS 以降の P-L 関係 . . . . . . . . . . . . . . . . . . . . . . . 311
F.3 MonteCarlo 計算のパラメータ . . . . . . . . . . . . . . . . . . . . . . . 313
H.1 本レポートの執筆者一覧 . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
13
第0章
JASMINE 計画の概要
我々は、天の川銀河(銀河系)と呼ばれる銀河の中にいる。銀河は、星やガス、ダーク
マターなどを構成要素とし、そのサイズ、質量、色、形態には様々なものが存在している。
この宇宙で我々から見える範囲内でも 1000 億個以上の銀河があると言われている、宇宙
に存在する最大規模の構成要素である。その多くの銀河の中で我々は、天の川銀河という
典型的な渦巻き銀河の中に住んでいる。確かに多くの銀河の中のたった1つのサンプルに
すぎないが、銀河系もこの宇宙で生まれ進化し、その形跡を中に留めているはずである。
さらに、星やダークマター等、宇宙に普遍的に存在する天体も銀河系は多く含んでいる。
従って、銀河系の全容を明らかにすることは、銀河系内にある様々な構成天体の解明や、
銀河系の構造や形成史を知ることに留まらず、宇宙初期での銀河の形成や銀河進化、そし
て宇宙そのものを解明することにもつながる。このように、銀河系の構造やその構成の
全容を明らかにすることは、銀河系の形成・進化、近傍宇宙論、重力多体系の新たな物理
法則、銀河系のダークマター、星形成、恒星物理学、宇宙距離指標、系外惑星などのサイ
エンスを飛躍的に発展させることにつながる。従って、銀河系をもっと理解することが、
今後の天文学では重要である。ところで、銀河系の解明にとって重要な情報となるのが、
銀河系内天体の測光 (photometry)、分光 (spectroscopy) 観測による、明るさ、色、金属
量、視線速度の情報であるが、これらと並んで、天体までの距離、天球上の位置、そして
視線に垂直方向の速度(横断速度)も重要な情報である。これらの情報を測定するのが位
置天文 (アストロメトリ:astrometry ) である。ただ、位置天文測定は、地上観測におい
ては大気ゆらぎの影響などがあり、良い精度を得ることは困難であった。そこで、スペー
スでの観測がスタートした(ヒッパルコス衛星)。しかし、ヒッパルコス衛星による位置
天文観測は画期的ではあったが、銀河系の全容を明らかにするための精度にははるかに及
んでいない。そのため、今後はやはり衛星によるさらなる高精度な位置天文観測が必要
である。特に、銀河系形成史の “化石” の宝庫と考えられる、星が一番集中して存在する
ディスクやバルジの全貌を明らかにするためには、ダストによる吸収の影響が小さい近赤
14
第 0 章 JASMINE 計画の概要
外線による位置天文観測が重要である。そこで、日本において国立天文台を中心として、
世界に先駆けて近赤外線による高精度位置天文観測衛星 (JASMINE) を計画している。
JASMINE 計画では、近赤外線 (z-band:0.9µm, または、K-band:2.2µm)によるアス
トロメトリ(位置天文)観測を行い、銀河系内、特に銀河面、バルジなどのサーベイを行
い、数億個の星の位置、距離、固有運動を今までにない高精度(現在より2桁の精度向
上)で測定する。天体の位置、年周視差、1 年当たりの固有運動は、10 万分の1秒角以
上の高精度で測定される。JASMINE は口径 2m 程度の主鏡、副鏡等からなる赤外線望遠
鏡を用いて観測する。さらに、99.5 度の角度方向離れた視野を同時に観測できるように、
49.75 度で交差する 2 枚の平面鏡を設置する。このようにするのは、絶対的な年周視差を
得るため等、グローバルなアストロメトを構築可能とするためである。また、焦点面には
なるべく広視野を得るために、検出器を数多くならべる。
衛星の打ち上げは 2013 年頃を目標とし、約 5 年間の観測を行う。打ち上げロケットは、
未定だが、H-IIA ロケットの dual launch でのフェアリングサイズを想定している。軌道
は、太陽ー地球がつくるラグランジュポイントのうち L2 を有力候補としている。衛星は、
スピン回転し、連続的にスキャン観測する。この衛星のスピン軸は、銀極から 3.5 度傾け、
スピン軸は銀極の周りを回転する。つまり、衛星はスピン回転しながら銀極の周りを歳差
運動する。こうすることによって、JASMINE は銀河面方向を 360◦ 、そして銀緯方向は
±3.5◦ 内のエリアを観測し、バルジとディスク面をサーベイする。
以上のように、JASMINE は、世界で唯一の近赤外線スペースアストロメトリ観測計画
であり、銀河系の解明と天文学の様々な分野の基礎となる位置天文情報を高精度で得るこ
とを目標とし、検討を進めているものである。
15
第1章
序章
この章の目次
1.1
1.2
1.3
1.4
1.5
1.6
銀河系を知る意味 . . . . . . . . . . . . . . . . . . . . . . . . . .
位置天文観測の発展
. . . . . . . . . . . . . . .
高精度アストロメトリの時代へ . . . . . . . . . .
スペースアストロメトリ計画と VERA 計画 . . .
近赤外線スペースアストロメトリ計画の必要性 . .
この報告書について . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15
17
18
21
21
22
1.1 銀河系を知る意味
アストロメトリ(位置天文)観測とは、天球上の星の位置、距離(年周視差)、固有運
動(天球上における横断速度の角速度)を測定するものだが、これに視線速度の情報を加
味すれば、星の 6 次元位相空間の情報が分かることになる。この情報は、銀河系内天体の
物理情報や銀河系そのもの(力学構造や形成史)を知るための貴重なものである。では、
なぜそもそも銀河系やその構成天体の情報を知ることが重要なのだろうか?
先ず、構成天体の情報に関して言えば、例えば年周視差によって、星までの距離が直接
的に精度良く分かる。ただし、現在および近未来の技術では、年周視差で精度良く分かる
のは銀河系内に限られるが、銀河系内には数多くの様々な種類の星があり、それらの星の
物理情報を知ることにより、恒星の進化や星形成に対する知見が深まる。例えば、距離が
分かれば星の本当の明るさやエネルギーが分かる。様々なタイプの星の明るさを知ること
によって、さらに星の色や金属量の情報が加味されれば、それらによって、恒星の進化や
星形成の物理過程の解析が画期的に進展する。また、星の場所と運動が分かると、実は場
所毎の星生成率や星の初期質量関数の推定までもが可能となる。まさに、場所毎の星形成
史が分かってくる。さらに、新星や超新星までの正確な距離から真の放出エネルギーを知
16
第1章
序章
ることは、それらの物理状態の解明にとっても重要である。さらに、変光星など距離指標
となる天体の本当の明るさが高精度で分かることは、距離指標の信頼性を高めることとな
り、遠くの銀河までの距離、ひいては、遠くの天体の物理情報を知るための礎ともなる。
また、連星の運動から連星系の物理情報も知ることが可能となるし、恒星運動のふらつき
からその恒星が惑星をもつかどうかの判断と惑星の質量情報等も知ることが可能となる。
以上のように、銀河系内天体のアストロメトリ情報により、恒星物理学、星形成、新星、
超新星、連星、変光星、系外惑星等の研究に対して画期的な発展が期待できる。次に、銀
河系そのものを知る意義としては次のようなものが考えられる。
(i) 銀河形成史の解明と近傍宇宙論
銀河は、宇宙に多数存在する宇宙の大規模な構成要素であるが、その構造や起源に関
しては、未知なることが多い。これは、銀河はその質量、明るさ、色、形態のどれをとっ
てみても多種多様であり、その形成と進化には、ダークマターの重力収縮、ガスの熱的進
化、星形成、銀河の衝突など様々な物理過程が複雑に絡んでいるからである。最近は、深
宇宙探査が進み、過去の多くの銀河の進化を直接観測できる時代となりつつある。このよ
うに多数の銀河を観測し、その統計的特徴を解析することはもちろん重要だが、形成進
化過程に関わる詳細な物理過程は直接的には窺い知れない。ところが、我々は天の川銀河
(銀河系)という特徴的な渦巻き銀河の中に住んでいる。我々の銀河が一番詳細に研究で
きる銀河である。確かに一つの例に過ぎないが、我々の銀河が他の(渦巻き)銀河と比べ
てよほど特異ではないかぎり、銀河全体の形成・進化の解明にとって、この上もない研究
対象であることは間違いない。まさに、銀河の形成・進化の化石を詳細に探ることが可能
であり、すばる望遠鏡やハッブル望遠鏡などによる深宇宙探査と相補的なアプローチとし
て、銀河系の 6 次元位相空間分布情報を知り銀河系を解明することは意義深いものであ
る。例えば、前述したように場所毎の星形成史と星の軌道や力学構造の情報を組み合わせ
ることにより、銀河系自体の形成史が明らかになっていく。このような、銀河系形成史の
“化石” を探ることがアストロメトリにより可能となる。
(ii) 自己重力多体系の物理
太陽系の力学構造については、基本的に太陽の周りを惑星がケプラー運動しているこ
とが知られている。実際は、多体系なので、厳密にはケプラー運動ではないが、太陽の質
量が他の惑星の質量に比べて圧倒的に大きいので、ほとんどケプラー運動で近似できる。
そして、このケプラーの法則より、ニュートン力学へと発展し、近代物理学が誕生してき
たことは周知のことである。しかし、太陽系以上のサイズの、しかもほとんど同等の質量
から成る多くの星(+ダークマター)の束縛系(自己重力多体系) に対して、実際、星の
軌道はどうなているのか、重力ポテンシャルや位相分布はどうなっているのか、現実は分
かっていない。N 体計算などの解析や理論モデルはあるが、現実がどうなっているか知る
ことは、やはり研究の画期的な発展をもたらすと期待できる。また、重力多体系のような
1.2 位置天文観測の発展
長距離力での緩和過程は、通常の気体や流体のような短距離力系で従来の統計力学が適用
できる系とは異なった様相を示す。従って、重力多体系の力学構造を明らかにすることは、
通常とは異なる長距離力系での新しい統計力学の構築に発展する可能性を秘めている。
以上、銀河系内の星のアストロメトリ情報により、銀河系の力学構造はもとより、星の
形成・進化、連星系や超新星の物理、銀河および系外銀河の形成・進化、惑星系形成、果
ては宇宙論に至るまで、様々な天文学、宇宙物理学の展開を可能とする。このように、ア
ストロメトリは、銀河系自体の物理情報はもちろんのこと、遠くの銀河の情報や宇宙論
にまで影響するわけであり、まさに天文学の基本と呼ぶにふさわしいものである。もちろ
ん、アストロメトリ情報以外に、測光 (photometry) と分光(spectroscopy) による、星
数の計測や視線速度、金属量の測定ももちろん重要な情報であり必要である。実際、20
世紀はこれらの情報が主体であった。しかし、これらの情報以外に天体までの距離、固有
運動といった運動学的な情報も必要不可欠であり、従って、銀河系の解明のためには高精
度な astrometric eye も必要なのであるが、21 世紀はいよいよその高精度な astrometric
eye が手に入る時代となる。
1.2 位置天文観測の発展
初期の天文学は位置天文学であったと言っても過言ではないだろう。星の位置とその時
間変化は、やはり天文学の基礎情報であった。最初の体系的な恒星カタログを作ったのは、
ヒッパルコス (Hipparchus:190-120BC) である。精度は、1500 秒角ほどであった。19 世
紀の終わりまでは、すべての天文観測は、天体の位置測定そのものであった。ところが、
その後、量子物理学の勃興などにより、いわゆる天体物理学が、天文学の大きな地位を占
めるようになる。例えば、星のスペクトル情報などにより星の内部構造や進化の研究が
画期的に発展してきた。さらに、電波からガンマ線に至るまで広範囲の電磁波による天文
観測が発展してきた。ところで、天体の年周視差や固有運動は多くの天体物理学の分野に
おいても重要な基礎情報であったが、1970 年ぐらいまでは、位置天文は、天体物理のよ
うな大いなる発展を行えていなかった。他の情報の精度に比べ、位置天文情報は非常に不
確かなままであった。しかし、1970 年頃以降から位置天文学も新しい時代を迎えてきた。
光学、電波の新しい技術、検出器やコンピューターの発展によって、失われた時代を取り
戻すがごとく、位置天文も進歩を開始した。1990 年代中頃までは、地上観測で得られた
FK5 星表 (the Fifth Fundamental Catalogue:FK stands for Fundamental-Katalog) が
もっとも進んだカタログであった [Fricke, 1988]。過去 1 世紀以上にわたる子午環観測の
結果到達できたものであり、V 等級で 7.5 等より明るい 1535 個の星に対して、位置と固
有運動の平均精度は、±35 ミリ秒角 (mas), ±1mas/yr である。さらに、FK5 Extension
カタログでは、11 等より明るい 3117 個の星が収められている [Fricke, 1991]。だが、地
17
18
第1章
序章
上の測定では、大気ゆらぎや装置の重力変形などに起因する観測精度の限界があり、ほ
ぼそれに達成してきた。そこで、ヨーロッパ宇宙機関 (ESA) ではヒッパルコス観測衛星
(HIPPARCOS:HIgh Precision PARallax COllecting Satellite) を計画し、いよいよス
ペースでの位置天文観測の時代に突入した。位置天文もいよいよ革命的なサイエンスと
なってきたのである。
ところで位置天文観測は、我々の宇宙における天体の幾何、運動学、力学を決め、様々
な天文学の重要な基礎情報を提供するとともに、もう一方は、基本座標系(天文座標系)
を構築する目的もある。地上では、前述した FK5 星表がその1つである。しかし、FK5
では、J2000.0 時点 (2000 年 1 月 1 日 12h 力学時) での春分点の方向が基準軸方向であ
るが、春分点は地球の一般歳差により、背景空間の中を移動してしまうし、そもそもそ
の基準点の精度が数十ミリ秒角というもので、今後の高精度観測の時代には対応できな
い。ところで一方、1970 年代より、VLBI による固有運動が無視できるほど遠方の銀河
系外天体、QSO を天球上の固定点として、電波源の高精度位置観測 (1mas より高精度)
が行われるようになってきた。その結果、天球上の実質的な不動点と考えられる QSO
や AGN を三角点網とする電波座標系を構築して、天文学会共通の国際天文基準座標系
(International Celestial Reference System=ICRS ) とすることが 1992 年の IAU 総会
で決議され、その後作業を経て、1997 年の IAU 総会で基準系が承認された。ちなみに
ICRS の基準面と基準点としての J2000.0 の瞬時の赤道面と春分点は、不動と見なされ
る系外天体の三角点網に固定されており、天球上に凍結されることとなっている。さて、
ヒッパルコス衛星では、QSO は暗すぎて観測できていないので、絶対的な座標系を張れ
ていない。つまり、ヒッパルコス星表はあくまでも、星々の天球上の相対的な位置である。
天球の向きと回転の 6 つの自由度が不定である。そこで、天球上の不動点で張られてい
る ICRS とヒッパルコス星表を結びつけることにより、絶対座標系を構築することができ
る。このようにしてできたヒッパルコス座標系は ICRS を可視光域で具体化した光学基準
座標系となっている。しかし、こうやってできてきた座標系も星が固有運動で動くことに
より、固有運動の誤差が起因して曖昧なものとなっていく。そこで、引き続き高精度な観
測を続け、基準系のバージョンアップが必要である。∗1
1.3 高精度アストロメトリの時代へ
前節で述べたように、1989 年にヨーロッパ宇宙機関(ESA)が打ち上げたヒッパルコ
ス衛星によって、アストロメトリ観測はいよいよスペースの時代に突入した (1992 年に
∗1
この章では、文中の参考文献の他、[Walter and Sovers, 2000, Kovalevsky, 2002, 宮本昌典, 1997] を
参考にした。
1.3 高精度アストロメトリの時代へ
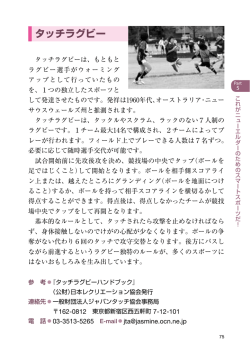
図 1.1: 天の川を我々の銀河系にみたてた模擬図。太陽系の位置を仮に定めて、そこ
からの位置天文(アストロメトリ)の観測によって、太陽系からどこまでの範囲で
どの程度のことが分かるかを記してある。例えば、ヒッパルコス衛星によって得ら
れた観測データの場合、星の年周視差による距離測定が 10%の誤差以内で得られて
いる領域が太陽の周りの小さな円で示されている。また、今後の高精度アストロメ
トリ観測で、もし 10 万分の一秒角 (10µas) の精度で星の年周視差や一年あたりの
固有運動が測定できた場合、 距離測定が 10%以内の誤差、横断速度が 1km/s 以内
の誤差になる領域も各々示してある(郷田、天文月報 2000 年 2 月号)。
19
20
第1章
序章
ミッションは終了。1997 年にその成果をカタログにしたヒッパルコスカタログがリリー
スされた)[ESA, 1997a]。位置測定に支障をもたらす地球大気の影響がないスペースに飛
び出したわけである。ヒッパルコス衛星以前は地上での年周視差の精度が最も良いカタロ
グでも、精度が約 35 mas であったのに対し、ヒッパルコス衛星では、1mas を達成した。
1桁以上の精度向上であった。このことにより、天文学での様々な分野で画期的な進展が
みられた(例えば、[ESA, 1997b] を参照)。ある意味で革命的であった。しかしながら、
ヒッパルコス衛星の観測の精度(位置精度、年周視差や1年当たりの固有運動は、約 1 ミ
リ秒角 (1mas)) は、まだ決して十分なものとはいえない。年周視差によって、距離が精度
良く(年周視差で約 10% 以内の精度が必要。これ以上だと、距離評価の際にバイアス効
果を受ける)決まるのは、1mas の精度だと我々から高々100pc 以内なのである (§ 3.4 を
参照)。銀河系全体(我々から銀河中心まで約 8kpc ある)に比べれば、はるかに小さい領
域しか見渡せていない。ヒッパルコス衛星はアストロメトリ観測にとって、革命的であっ
たが、それは小さな革命でしかなかった。例えば、ヒッパルコス衛星だと我々から 100pc
以内しか精度良く距離を求めることができず、その範囲以内にはセファイド変光星など距
離指標としても興味ある天体はほとんど存在しない。そこで、100pc 以上の距離にある精
度が比較的悪いデータも用いて、統計的な解析を行い、変光星の明るさと周期関係のゼロ
点を求めている。その統計方法の違いなどにより、大マゼラン星雲までの距離に約 20%
の開きが出ている。遠くの銀河までの距離は、この大マゼラン星雲を基準として測定して
いる場合も多く、その場合、遠くの銀河までの距離も 20% の誤差を含むことになる。す
ると、それを用いてハッブル定数といった宇宙論パラメータにも誤差が入る。また、変光
星の絶対等級に誤差が入ると球状星団の年齢にも数十億年といった誤差がはいり、宇宙の
年齢の下限値が定まらなかった。このようにヒッパルコス衛星の結果では、宇宙距離指標
の例でもまだまだ精度不足でさらなる精度アップを必要としている。
そこで、次は、銀河系全体のスケールを精度良く見渡す必要がある。そのためには、10
万分の 1 秒角 (10µas) 以上という高精度なアストロメトリ観測を要求する。この精度が
あれば、我々から 10kpc 以内の星を年周視差によって、10% 以内の誤差によって距離を
評価でき、また、20kpc 以内の星の横断速度を 1km/s 以内の誤差で決定できる (図 1.1 を
参照)。この精度まで得られれば、銀河系のかなりのことは解明できるであろうし、さら
に系外銀河も target に入ってくる。これらが天文学、宇宙物理学の多くの分野に break
through をもたらすことは間違いない。つまり、今度こそ大革命の時代が訪れるのであ
る。そこで、JASMINE も 10 万分の 1 秒角の高精度な位置測定達成を目標とする。
1.4 スペースアストロメトリ計画と VERA 計画
1.4 スペースアストロメトリ計画と VERA 計画
ヒッパルコス衛星の成功を受けて、欧米でも高精度観測を睨んだ将来計画が始まってい
る。詳細は、次章で記述するが、ヨーロッパ宇宙機関 (ESA) は、ヒッパルコスの後継と
して GAIA 計画を進行させている。GAIA は V-band で 15 等級の星を約 10 マイクロ秒
角の高精度で測定する。約 10 億個の 20 等級までの星を測定する。2012 年の打ち上げ予
定である。アメリカは、NASA を中心として Origins 計画の一環として SIM 計画を進行
中である。SIM は他のアストロメトリ衛星とは違って、干渉計である。暗い星まで超高
精度 (4 マイクロ秒角)で測定可能となる。ただ、他の計画が、サーベイ型であり大量の
天体を観測するのに対しては、SIM は、選ばれた少数の天体 (約 1 万個)のみの観測と
なる。また、SIM は初めてのスペース干渉計の実現としても期待されている。打ち上げ
予定は 2009 年である。さらに、次のような計画も有ったが、残念ながら予算上の問題も
あり、凍結された。ドイツは 2006 年の打ち上げを目標とした DIVA 計画があった。精度
は、ヒッパルコスより約 5 倍の向上に過ぎないが、ヒッパルコスと次世代の高精度観測衛
星(約 10 マイクロ秒角の高精度観測)との間をつなぐものとして期待されていたが、予
算が獲得できずに 2003 年 2 月にキャンセルとなった。アメリカも海軍天文台を中心とし
て FAME 計画を検討していた。これは、約 50 マイクロ秒角の精度達成を目標としたも
ので、ヒッパルコスと次世代の間をつなぐものとして期待されていた。しかし、予算上の
問題、および CCD 製作上の問題から、2002 年 1 月に NASA がこの計画より撤退したこ
とにより、現在は開発が凍結中である。ただ、ドイツの宇宙機関 (DLR) と NASA とが、
合同のスペースアストロメトリ計画の交渉に入るという情報もある。
スペースアストロメトリ計画ではないが、地上の電波位置天文観測計画として日本では
国立天文台を中心とした VERA 計画がまもなく稼働することは注目に値する。10 マイ
クロ秒角という超高精度を世界ではじめて達成することが期待されている。観測対象は、
メーザー源であり、約 1000 個程度に限られはするが、銀河系中心までの距離や、銀河回
転速度など、銀河系の基本定数を高精度ではじめて決定できる可能性がある。
1.5 近赤外線スペースアストロメトリ計画の必要性
高精度アストロメトリ観測の重要性が世界では認識されていることは、前節で述べたよ
うに欧米で 2 つのスペースアストロメトリ計画がアプルーブされ進行中であることからも
伺い知れる(NASA の SIM、ESA の GAIA)。また、日本でも国立天文台が中心となっ
て、地上の電波位置天文観測である VERA 計画が進行中であることも説明した。ただ、
欧米のスペースアストロメトリ計画はすべて可視光領域の観測であるため、興味ある銀河
21
22
第1章
序章
中心や、バルジ、遠くの銀河面はダストによる減光効果でほとんど観測することができな
い。そこで、ダストによる吸収の効果が少ない近赤外線による観測が有効である (2.5, 4.3
節を参照)。さらに、(メーザー源をみる)電波観測とは違って星自体を大量に観測するこ
とができる。この観測によって、バルジ、銀河面(ディスク)の構造を解明できることは
もとより、ダストに覆い隠されている星形成領域での星のアストロメトリ情報も得るこ
とが可能となる。ここに JASMINE 計画の意義がある。日本では、VERA 計画の次のス
テップとして、JASMINE 計画を位置づけられると思われる。
1.6 この報告書について
以上から、10 万分の 1 秒角の高精度観測が可能な赤外線スペースアストロメトリ計画
が重要であり、意義深いものであることを理解していただけると期待する(さらに詳細な
説明はこのあとの本報告書をご覧頂きたい)。そこで、日本では国立天文台を中心とし、
JASMINE 計画の検討をスタートしている。本検討報告書は、1999 年に検討を開始して
から現在まで行ってきた検討結果の最初の報告であるとともに、実現を目指して今後の開
発を進める方向性も記してある。本報告書に対して関係諸方面からの辛辣なご意見を頂
き、今後の検討、開発の礎とさせて頂きたいと考えている。また、本報告書を読まれ、一
人でも多くの方が本計画に興味をもたれ、ご支援、ご協力をしていただければ大変幸甚で
ある。
23
第2章
海外計画の紹介と JASMINE の位置
づけ
この章の目次
2.1
2.2
2.3
2.4
2.5
海外計画の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . .
GAIA . . . . . . . . . . .
SIM . . . . . . . . . . . .
その他の参考事項 . . . . . .
2.4.1 DIVA . . . . . . . .
2.4.2 FAME . . . . . . . .
JASMINE 計画の位置づけ
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
24
25
25
25
27
27
2.1 海外計画の概要
前章で述べたように、今後はさらなる銀河系の解明、また宇宙距離指標の精度アップや
恒星物理学などの画期的な発展を目標とし、ヒッパルコス衛星より高精度な位置測定を目
指した計画が進行中である。この章では、欧米で検討されているスペースアストロメトリ
計画を紹介するととともに、その中での JASMINE 計画の位置づけを再度強調しておき
たい。
先ず、欧米のスペースアストロメトリ計画をまとめたものを表 2.1 に示した(ヒッパル
コス衛星と JASMINE も比較のため含む)。以下、各々の計画について順番に説明してい
く。各計画の詳細は、それぞれのホームページを参照されたい。なお、途中で中止となっ
た DIVA と FAME 計画も参考のため、紹介しておく。ただ、ドイツの宇宙機関 (DLR)
と NASA での合同のスペースアストロメトリ計画(DIVA-FAME)の交渉が開始される
との情報もあることを付け加えておく。
24
第 2 章 海外計画の紹介と JASMINE の位置づけ
計画
機関
装置
打ち上
星の観
限界
げ予定
測数
等級
精度
Hipparcos
ESA
望遠鏡
1989
12 万
12
1mas@V=10
GAIA
ESA
望遠鏡
∼2012
10 億
20
10µas@V=15
SIM
NASA
干渉計
∼2009
1万
20
4µas@V=20
DIVA
Germany
望遠鏡
中止
3500 万
15
250µas@V=10
FAME
USO&NASA
望遠鏡
中止
4000 万
15
50µas@V=9
JASMINE
日本
望遠鏡
∼2013
3.0 億
16
10µas@K=12
18
10µas@z=15.5
1.8 億
表 2.1: 欧米のスペースアストロメトリ計画との比較表
2.2 GAIA
http://astro.estec.esa.nl/SA-general/Projects/GAIA/
GAIA(Global Astrometry Instrument for Astrophysics) は、ESA がヒッパルコス衛
星の後継として開発しているスペースアストロメトリ計画である。V=15 等で 10µas の
位置測定精度を達成する。全天サーベイで 20 等までの星を約 10 億個観測する。GAIA
では、アストロメトリ観測以外にも 4 つのブロードバンドと 11 の中間バンドによる測光
および分光装置による視線速度観測も行う。視線速度の精度は、V=18 等で約 5km/s を
目標としている。また、ヒッパルコス衛星と同様に大角度(106 度)離れた視野を同時に
観測する(4.2.4、5.6 節参照)。打ち上げはソユーズロケットの使用を計画しており、軌道
は、太陽ー地球がつくるラグランジュポイントのうち、L2 である。また、L2 の周りでは、
食を避けるリサージュ軌道をとり、実際の観測期間は約 5 年間を予定している。さて、最
新の主な仕様は以下の通りである。
主鏡のサイズ:1.4m ×0.5m(これを2枚)
焦点距離:46.67m
視野面積:> 0.4deg2
Number of CCDs in Astro fields: 11 × 10 = 110
Total number of CCDs: 180
TDI integration time per chip: 3.3sec
2.3 SIM
2.3 SIM
http://planetquest.jpl.nasa.gov/SIM/sim index.html
SIM(Space Interferometry Mission) は、NASA によって推進されている計画である。
他のスペースアストロメトリ計画とは違い、干渉計である。世界で初めてのスペース干渉
計であり、基線長は 10m である。他のサーベイ型の衛星とは異なり、少数の天体(約 1
万個)を比較的暗い星まで高精度で測定する。V=20mag より明るい星を、4µas の高精
度で年周視差の測定を目標としている。ただ、同時に大角度離れた視野を観測するわけで
はなく、SIM では、絶対的な年周視差や座標系を構築するために、あらかじめ決められた
grid star をもとに、観測した領域をタイル張りのように張り合わせていく方法を採用す
る。このような方法でグローバルなアストロメトリ情報(絶対的な年周視差、張り巡らさ
れた全体の座標系)を高精度で求めるのは非常にチャレンジングであると思われる。
2.4 その他の参考事項
2.4.1 DIVA
http://www.ari.uni-heidelberg.de/diva/
DIVA(Double Interferometer for Visual Astrometry) はドイツ単独の計画であり、
2006 年の打ち上げを目指していた。しかし、予算獲得ができず、2003 年 2 月に DLR(ド
イツの宇宙機関)は、DIVA を中止とした。考えられていた仕様は次の通りである。
スキャン方法や衛星の回転速度は、ヒッパルコス衛星と似ており、全天サーベイを行う。
また、大角度離れた視野を同時に観測するが、その角度は約 100 度である。位置や年周視
差の精度は、V=10 等級で、0.25mas であり、V=15 等級より明るい星、約 3500 万個を
観測する。精度は、10 万分の 1 秒角まではいかず、ヒッパルコスに比べて 5 倍程度の精
度向上である。しかし、この精度が達成されれば、我々から 500pc 以内の天体の距離を年
周視差から 10% 以内の誤算で求めることができる。1.3 節で述べたように、ヒッパルコス
だと 100pc 以内しか精度良く距離を求めることができず、その範囲以内にはセファイド変
光星など距離指標としても興味ある天体はほとんど存在しなかった。しかし、500pc まで
だとある程度数多く存在するようになる。変光星の距離が高精度で決まり、変光星を用い
た宇宙距離指標はかなりの信頼度を得ることが期待される。このように、ヒッパルコス衛
星と GAIA、SIM、JASMINE といった 10 万分の 1 秒角を出す次世代の高精度衛星の間
の期間をつなぐものとして、サイエンスでもその成果が期待されていた。
25
26
第 2 章 海外計画の紹介と JASMINE の位置づけ
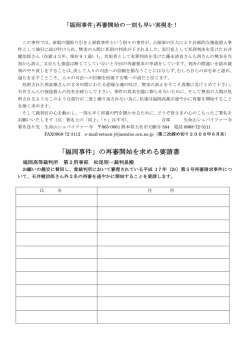
図 2.1: HIPPARCOS 衛星で観測された変光星と位置決定精度。×は Cepheid、四
角は RR Lyrae、三角は Mira 型変光星を示す。破線は HIPPARCOS で、一点鎖線
は DIVA 仕様で、破線は FAME 仕様で、点線は GAIA 仕様でそれぞれ 10% の精
度で距離を決められる限界を示す。変光星のプロットは HIPPARCOS データを用
いているため、暗い方や遠方はデータが欠落している。
さて、DIVA という名前の由来には Interferometer という文字が入っているが、最新の
仕様では、干渉計ではなく、単一鏡の望遠鏡である。また、焦点面には CCD を複数個並
べ、TDI モード (drift scan モード)を起動して観測する(4.1 参照)。望遠鏡の仕様とし
ては、以下の通りである。
主鏡のサイズ:22.5cm ×11cm
焦点距離:11.2m
視野面積:0.6◦ × 0.6◦
2.5 JASMINE 計画の位置づけ
2.4.2 FAME
http://aa.usno.navy.mil/fame/
アメリカの海軍天文台 (UNO) を中心として、FAME(Full-Sky Astrometric Mapping
Explorer) が計画されていた。この計画は、NASA Medium Class Explorer Program と
して選ばれたものであった。しかし、2002 年 1 月に NASA がこの計画より撤退を表明し
た。予算が当初予定より増えすぎたのと、CCD の制作上の問題である。残念であるが、
その後全く進展している様子はなく、事実上のキャンセルと思われる。精度は、V=9 等
で 50µas を目標としていた。これも 10µas には及ばないが、2kpc 以内の天体を年周視差
で 10% 以内の誤差で距離を測定可能である。約 4000 万個の星を全天サーベイにより観
測する。DIVA と同様、ヒッパルコス衛星と SIM や GAIA の間をつなぐものとして期待
されていた。一応、2002 年 1 月時点での FAME 仕様を以下に掲載しておく。
主鏡のサイズ:47cm ×42.6m
焦点距離:10.5m
視野直径:1.25◦
2.5 JASMINE 計画の位置づけ
以上のスペースアストロメトリ計画はすべて可視光領域での観測である。赤外線での計
画はまだない。そこで、JASMINE 計画は世界に先駆けて赤外線での位置天文観測を目
指す。赤外線、特に近赤外線を用いるのはまだやられていないと言う理由だけではなく、
大きなメリットがある。銀河系の全容を明らかにするためには、銀河系のバルジ、および
ディスクの全貌を解明する必要がある。またバルジやディスクは、星が一番密集し、銀河
系形成史を解く鍵となる “化石” の宝庫でもある。しかし、ダストも多く存在するため、
可視光を吸収しやすい。従って、遠くのディスク面やバルジを可視光で観測するとほとん
ど見えないか、見えても観測できる星の数は少数となる。一方、近赤外線は、ダストによ
る吸収の影響が可視光に比べて少ない。従って、可視光で観測するのに比べて、同じ位置
精度を出せる星の数が、バルジや遠くの銀河面では圧倒的に多くなる (詳細は、4.3 節を
参照)。バルジやディスクの運動学、力学的解析を行うためには、多数の星の情報が必要
である(場合によるが最低限でも、各構造要素ごとに 100 万個程度あることが望ましい)。
また、星形成領域もダストに覆われているため、中心にある星の位置天文情報を可視光で
得るのは困難であることが多い。しかし、近赤外線では、それが可能となる。つまり、星
形成領域までの距離や運動も近赤外線をもちいたアストロメトリ観測では高精度な測定が
27
28
第 2 章 海外計画の紹介と JASMINE の位置づけ
期待される。しかし、可視光に比べて赤外線は波長が長い。したがって、同じ位置精度を
得るためには、大きな鏡を用意するか、そうでなければ、天体の光子数をより多く獲得し
なくてはいけない。鏡の大きさや、衛星の life time は様々な制限から可視光のスペース
計画とほぼ同様である。従って、1つの天体に対する光子数を増やすためには、サーベイ
面積を小さくするしか仕方がなく、他の可視光サーベイ型アストロメトリ衛星とは異な
り、全天サーベイは非常に困難である。つまり、サーベイエリアを限る必要がある。とこ
ろで一方、ディスク面より離れた方向、つまりハロー部分の観測は、ダストの影響がほと
んどなく、可視光でのアストロメトリ観測で多数の星が高精度で観測されうる。従って、
そこは近赤外線でやる必要はなく、やはり、銀河面近くの方向での観測において、近赤外
線をもちいる効力が出てくる。従って、JASMINE は主に銀河面方向のみを観測領域とす
ることで、そのサイエンスのアウトプットが最大限に引き出されるとともに、サーベイエ
リアを限ったことにより、エリア内の星の光を十分に集めることが可能となり、可視光と
同様な仕様の衛星でも近赤外線での高精度観測が可能となる。
さて、もう一つ近赤外線で行うことの困難は、検出器の問題がある。後述するように
(4.1 節参照)、連続的なスキャンサーベイをしながら星像をゆがめずにできるだけ長く
光子をためるためには、TDI モード (drift scan モード)が使えることが、非常に重要
である。可視光の CCD はすでに開発が進んでおり、TDI モードも可能である。しかし、
近赤外線では、TDI モードが可能で、かつ感度がよい検出器がまだない。ただ、これも
K-band および z-band での検出器の開発を進めている。特に z-band 付近に感度ピーク
をもつ高感度 CCD はかなり開発されてきている (4.2.3, 5.5.2 節を参照)。
このように、近赤外線によるアストロメトリ観測は、可視光による観測と相補的なもの
であり、両者が車の両輪のようにうまく組み合わされば、銀河系の全容の解明に対して飛
躍的な進歩をもたらすことが期待できる。
29
第3章
JASMINE で拓くサイエンス
この章の目次
3.1
3.2
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
銀河系の力学構造と形成史 . . . . . . . . . . . . . . . . . . . . .
3.2.1
3.2.2
3.2.3
3.2.4
3.2.5
3.2.6
3.2.7
3.3
3.4
3.5
3.6
Bulge . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
thin disk と thick disk . . . . . . . . . . . . . . . . . . . .
銀河系 warp の構造とアストロメトリ . . . . . . . . . . . . .
サテライト銀河の進化とアストロメトリ . . . . . . . . . . . .
力学構造の構築 . . . . . . . . . . . . . . . . . . . . . . . .
長距離力系の統計物理学 . . . . . . . . . . . . . . . . . . . .
高精度距離決定による高精度化学組成決定 . . . . . . . . . . .
星形成と恒星物理 . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 アストロメトリで探る星の初期質量関数 . . . . . . . . . . . .
3.3.2 星形成領域の分布 . . . . . . . . . . . . . . . . . . . . . . .
3.3.3 thin disk 最外縁の星生成領域 . . . . . . . . . . . . . . . . .
年周視差に関するバイアスについて . . . . . . . . . . . . . . . . .
3.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 計算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.4 計算結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.5 HIPPARCOS データへの適用 . . . . . . . . . . . . . . . .
3.4.6 まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Astrometric Microlens . . . . . . . . . . . . . . . . . . . . .
3.5.1 重力レンズ . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2 重力理論の検証 . . . . . . . . . . . . . . . . . . . . . . . .
3.5.3 Astrometric Microlensing と JASMINE . . . . . . . . . . .
3.5.4 位置マイクロレンズ現象によるダークマターの質量とサイズの
決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.5 銀河系外未同定天体 . . . . . . . . . . . . . . . . . . . . . .
系外惑星探査 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
31
32
33
38
42
46
50
51
54
54
58
58
63
63
64
65
66
68
69
71
71
72
73
76
85
89
30
第 3 章 JASMINE で拓くサイエンス
3.7
赤外線天体の基準座標系
. . . . . . . . . . . . . . . . . . . . . .
90
3.1 概要
JASMINE は近赤外線で観測を行うメリットを活かし、銀河系のディスク面、バルジ、
銀河中心付近のサーベイを中心に行う。前述したように、銀河の形成進化はまだ完全に解
明されていない重要な問題である。特に銀河は多種多様であり、形だけでも渦巻き、楕円
銀河等様々な形態が存在する。このような銀河自体やそれらの種類の違いがどのようにし
てできたのかを解明することが大きな課題である。ところで、銀河には、ディスク (thin
disk and thick disk)、バルジ、ハロー成分があることが分かってはいるが、実はその大き
さ、形、構造、形成要因の詳細は未解決である。また、渦巻き銀河と楕円銀河の違いの一
つは、ディスクとバルジ成分の明るさの相対的な違いである。従って、銀河の形態の違い
を明らかにする上でも、形成過程の違いなどその特徴の違いの原因を明確にする必要があ
る。ところが、我々の天の川銀河はすべての成分をもっていると考えられ、さらに唯一、
それらの3次元的位置情報および運動情報を精度良く測定できる対象でもある。天の川銀
河が一般的だとすれば、天の川銀河の構造と形成史が分かれば他の銀河の形成進化を知る
上でも重要な情報になる。そこで、銀河系の各成分、特に JASMINE では、様々な星が
大量に存在し、まさに銀河系形成史の “化石” の宝庫と呼んでもよい(可視光だけでは観
測できない)銀河系のディスク、バルジの構造を明らかにすることによって銀河系の形成
史を明らかにするとともに、銀河全般の形成進化の解明につなげることをサイエンスの大
きな目的とする。
さらには、恒星物理学、宇宙距離指標、さらには星形成領域の観測によって、星形成の
物理を明らかにしたり、系外惑星探査、重力レンズ効果、特にディスク星によるマイクロ
レンズ効果の物理など様々なサイエンスも拓くことが可能である。重力レンズ効果に関し
ては、この効果を用いて一般相対論の検証も可能である。また、銀河系の力学構造の解明
は、自己重力多体系での(準)平衡状態の物理法則、ひいては長距離力系での統計物理学
にも結びつく可能性を秘めている。このように相対論や統計物理学のような基礎物理学に
も関わっている。最後に、JASMINE は、現在より 2 桁の精度向上となるが、今までの経
験上、、オーダーで精度が向上すると、何か予期せぬ画期的な発見も期待できるだろう。
位置天文観測は、基本的には天体の天球上の位置、年周視差、固有運動というわずか5つ
のパラメータを測定するものであるが、そのパラメータを用いて拓かれる天文学、天体物
理学のサイエンスは無尽蔵といっても過言ではないだろう。まさに、位置天文は天文学の
基本と呼ばれる所以である。JASMINE のデータを用いてどのサイエンスをどのように
切り開いていくかは、以下に記述するのはほんの一例にしか過ぎない。新しい観点から、
3.2 銀河系の力学構造と形成史
もっと多くのサイエンスが発展していくと期待されるし、それは研究者各自のまさに独創
性に関わっていると言えよう。
3.2 銀河系の力学構造と形成史
JASMINE や GAIA 等の高精度アストロメトリ観測により、銀河系の現在の構造はも
とより、その形成史も明らかになっていく。このことは、何度も述べたように、銀河全般
の形成、進化の解明にも深く結びついている。
多くの系外銀河の観測から銀河はいくつかの構造から成り立っている。つまり、バルジ
(バー構造となっていることもある)、thin disk、そして thick disk がある場合もある。そ
してさらに、これらを取り巻くハローがある。これらの構造の大きさはどれぐらいなのだ
ろうか? 年齢は? 形や密度分布は? そしてどのように形成されてきたのか? 他の
構造に影響を及ぼしているのか? などといった疑問があるが、これらはまだ完全には解
明されていない。また、すべて銀河は、ディスクとバルジを持っていることは分かってい
るが、その銀河でどちらが明るさや大きさで貢献しているのか、に関しては、その度合い
にはバラツキがあり、ハッブル系列として分類されている。また、多くの割合で銀河は、
バーや thick disk を持っている。銀河の中のこういった構造が如何にしてできてきたの
か、そして、バルジやディスクの銀河に占めるウェイトの違いやバラツキはどうして生じ
ているのか、という問題の解明が銀河全般の形成、進化にとって大変重要であり、興味深
い。そして、これらの問題に答えるためには、各々の構造がどのようなものであり、力学
的にどのように機能しているのか、といった力学的状態の完全な描像を持つことが必要で
ある。そして、それが可能となるのは、我々の天の川銀河、つまり銀河系を調べることに
よってのみである。なぜならば、天の川銀河が以上で述べた銀河の中の各構造をすべてを
もち、宇宙に存在する銀河の典型的なもであるとともに、天体の運動情報を通じて、各構
造の力学構造を精度良く決めることができるのは、我々の銀河系しかないからである。ハ
ロー構造や、太陽系近傍のディスク構造は、SIM、GAIA といった可視光のスペースアス
トロメトリ計画で探ることができる。しかし、バルジや太陽系から離れた(数 kpc より遠
方)ディスクの構造を調べるためには、ダストによる吸収の影響が少ない近赤外線を用い
る JASMINE がその力を発揮するところである。むしろ、JASMINE は §2.5 で述べたよ
うに銀河面方向、つまりバルジやディスクに観測対象を絞り、その構造を明らかにしてい
くことを大きな目的としている。銀河系全体に関してはハローの部分は GAIA 等の結果
を参照し、結びつけることによって、全容が明らかになると期待される。このように、欧
米のスペースアストロメトリ計画と相補的なものとして JASMINE 計画は位置づけられ、
両者が成功して良い結果を出すことによって、前述した問題が解明され、銀河系、ひいて
は銀河全般の形成史の研究が発展されるものと考えている。
31
32
第 3 章 JASMINE で拓くサイエンス
そして、もう一つ、銀河系の力学構造を明らかにする意義として大きなことがある。序
章でも述べたように太陽系以上のスケールで天体を非常に多く含み、自己の重力で束縛さ
れている自己重力多体系の物理法則は未だ明らかになっていない。自己重力系の緩和過
程や(準)定常状態がどのようなもので、どういう法則性があるのかを理解することは、
天文学的興味以外にもアカデミックな意味としても興味深い。それは、自己重力系のよう
な長距離力系での統計力学の構築にもつながる可能性がる。理論モデルや N 体計算での
解析は進行しているが、やはり実際にどうなっているのかを知ることは重要である。理
論、数値実験、観測という 3 拍子が揃うことによって画期的な発展が期待できる。そこで
JASMINE 等のアストロメトリ情報によって銀河系の力学構造の構築が必要である。
以上が、銀河の力学構造とその形成史に対しての概要であるが、個々の研究テーマに関
しては以下の各小節で記述していく。
3.2.1 Bulge
バルジは、ご存じのように銀河の中心部に位置し、“ふくらみ” をもった構造である。
ディスクよりは古い星の集まりであるが、金属量に関しては、多いものはディスクと同様
の太陽程度であるが、もっと少ないものまで幅広く分散している。単位質量あたりの角運
動量は、ハローの星々と同様に小さい。このようにバルジの特徴は、ディスクともハロー
とも異なっている。では、このようなバルジの形成史はどうなるのだろうか? ディスクの
不安定性で生じたものなのか? ハローより以前に出来たのか、それとも後か? はたまた、
銀河の合体した後に生じたものなのか? 矮小銀河が降ってきて、ディスクと同時に出来た
のか? それともバーの力学的進化として、ディスクのあとに出来たのか? これらの問題
は解明されていない。前述したように、ディスクとバルジの関係は、銀河の形態分類に密
着している。つまり、楕円銀河と渦巻き銀河との区分に関係している。従って、バルジ形
成を明らかにすることは、銀河の形態の起源に解明につながる重要な課題である。この課
題の解明のためには、、バルジの正確な形状(つまり、3 次元的な位置分布)やバルジ内の
天体の運動を知ることが必要であるが、これからはまさに JASMINE のような近赤外線
による高精度なアストロメトリ観測によって提供されるものである。
バルジの力学構造を知ることは、上述したような銀河系や銀河の進化を知るためだけで
はなくてそれ自身が興味深いものである。つまり、自己重力多体系の(準)定常状態の解
明である。バルジは、楕円銀河にも形状などが似ており、バルジの力学構造の解明は、楕
円銀河の力学構造の解明にもつながると期待される。さて、バルジはバーがあり、しかも
figure rotation の存在が示唆されている。3 軸不等な形状で、なおかつ回転がある場合、
力学構造としてはいかなる状態なのであろうか? その重力ポテンシャルや個々の星々の軌
道がどのようなものであり、どうして(準)定常状態、もしくはそれに近い状態を維持し
3.2 銀河系の力学構造と形成史
ているのか、または非定常的に進化しているのか、非常に興味深い課題である。
3.2.2 thin disk と thick disk
我々の銀河系はハロー、バルジ構造以外にディスク構造をもっているが、ディスク構
造も実際には、thin disk と thick disk と呼ばれる二つの構造に分けられる。Thin disk
の scale height(Z0 )、z 方向の速度分散 (σz )、回転速度 (Vrot )、[Fe/H] の平均が、各々、
Z0 ∼ 300pc、σz ∼ 20km/s、Vrot ∼ 220km/s、[Fe/H] ∼ −0.3、なのに対して、thick
disk の方は、各々、Z0 ∼ 800pc、σz ∼ 40km/s、Vrot ∼ 190km/s、[Fe/H] ∼ −0.6 で
ある [Robin et al., 1996, Ojha et al., 1996, Ojha et al., 1999]。先ず、今後の高精度アス
トロメトリ観測によって、これらの値の verion up が可能となるだろう。また、thin disk
にしても JASMINE によって、初めて太陽近傍よりはるかにはなれた場所での実際の分
布が明らかになってくることは楽しみである。
Thick Disk の形成モデル
さて、thick disk の形成原因としては、大きく分けて、I.bottom-up(post-thin disk ) モ
デルと II.top-down(pre-thin disk ) モデルとに分かれる。そして、I と II ともに、各々の
中でいくつかのモデルが存在する。詳細は、参考文献 [Majewski, 1993] を見ていただき
たい。Bottom-up 説は最初に thin disk が形成され、その後、何らかの原因で thick disk
が形成されたと考えるものである。その原因の一つが、衛星銀河による衝突合体である
と考えられている [Quinn et al., 1993, Walker et al., 1996, Huang and Carlberg, 1997,
Velázquez and White, 1999]。この説によれば、初期の thin disk に衛星銀河が衝突し、
その運動エネルギーを thin disk がもらうことで、速度分散が大きくなりふくらみ、Z0
も σz も増加し、thick disk が形成される。その後、thick disk の中で、残存しているガ
スが冷却してディスク上にガスが集まり、そこで静々と星ができてくるが、それがあた
らしい現存の thin disk であると考える。その他の bottom-up モデルの一つとしては、
thin disk 内の星々が、巨大分子雲との散乱により、ふくらみ、thick disk になると考える
ものであるが、いくつかの点でこの説は問題視されている。さて、もう一つの top-down
モデルの一つは、ハローでの星形成以後に、ある短期間で急激な星形成が起こり、そ
こで、thin disk より先に thick disk が形成されたと考えるものである (enhanced star
formation モデル)。さて、現在のところ、thin disk と thick disk の間に 1)density law
の slope のはっきりした変化がある、2)thick disk は thin disk と halo とも運動学的に異
なる、3)thick disk は vertical abundance gradient はなし、4) 系外銀河で thick disk を
もたないものがある、という観測結果がある。以上の事実は、thick disk と thin disk は連
33
34
第 3 章 JASMINE で拓くサイエンス
続的につながっているわけではなく、はっきりと形成時期に違いがあること、また thick
disk をもたない銀河があることから、ランダムな形成のプロセスが原因とも考えられる
[Robin et al., 1996]。これらの点から言えば、衛星銀河の衝突合体説が有力であり、あと
は top-down モデルの一つである、enhanced star formation モデルもその可能性は残る。
今後の戦略
では、本当に thick disk の形成原因は衛星銀河の衝突合体なのだろうか。もし、合体説
が正しいとすれば、scale height と σz に半径依存性があり、銀河の外側にいくほど、増大
すると予想される [Quinn et al., 1993, Walker et al., 1996, Huang and Carlberg, 1997,
Velázquez and White, 1999]。しかし、現在ではその傾向が見られるほど遠くまでの精度
良い観測データは得られていない。そこで、今後の高精度アストロメトリ観測によって精
度良い 6 次元位相空間(天球上の位置、距離、固有運動、視線速度)の情報が分かれば、
thick disk の構造をより精度良く把握できるかもしれない。そして、Z0 等の半径依存性と
いった特徴が見られれば、合体説の裏付けとなるかもしれない。しかし、観測できる個数
は有限に限られるかもしれない。その場合は、その有限のデータを有効に利用する統計的
処理、及び、観測データと比較すべきテンプレートとなる力学構造のモデルを構築してお
く必要がある(詳細は、3.2.5 参照)。そのためには、当然形成モデルとの関連でいくつか
のテンプレートを用意しておく必要はある。何を明白に知りたいのか、そのためにはどん
な物理量を有効に引き出す統計処理やテンプレート作りが必要なのか検討し、準備を進め
る必要がある。しかし、いずれにせよ、thick disk の構造から銀河系の形成・進化に重要
な示唆が得られれば、これは、銀河系のみならず、一般の(ディスク)銀河に対する形成・
進化に対してもインパクトを与えるものである。従って、高精度アストロメトリ情報を得
ることは、ここで述べた観点からみても、大きな目標の一つとすべきであると考える。
Spiral Arm
ディスク銀河にはスパイラルアーム構造が標準的に存在する。このスパイラルアームの
物理状態、力学構造がどのようなものであるのか、すなわち物質波であるのか、それとも
密度波であるか、といった事はいまだに十分には解決していない重要な問題のうちの一
つである。ここで物質波というのは、アームを形成している物質がアームと共に運動し、
アームの中の物質がいつでも同じアームに存在するという考え方である。この考え方は非
常に簡単であるが、銀河中心程銀河回転の角速度が大きいために数ダイナミカルタイム
でアームが巻き込んでしまうという巻き込みの問題がある。この巻き込みの問題はディス
ク銀河にスパイラルアームが普遍的に存在する事と矛盾する。一方、密度波の考え方は
3.2 銀河系の力学構造と形成史
35
密度の疎密波が、銀河面を伝わっていき、その密な部分がアームであるという考え方であ
る。こちらは密度波の疎密の回転速度と銀河を形成する物質の回転速度は基本的に独立で
ある。すなわち、銀河の物質は角半径ごとに異なる角速度をもって回っても、疎密波が各
半径で等しい角速度をもって銀河物質の角速度とは独立に回っておれば巻き込みの問題を
解決するなど、非常に有力な考え方である。このような密度波に従い運動しているなら
ば、スパイラルアームの場所で星間ガスの渋滞が起きるがその渋滞に起因してショック波
が発生すると考えられる事、Corotation Resonance をおこす半径を境に星の角速度とパ
ターン速度の関係が入れ替わるのでアームに付随するダストレーンの形状が Corotation
Resonance で変化する事などが考えられるが、観測はこういった現象を示唆している。以
上のようにスパイラルアームは密度波であると思われるような間接的な証拠などもあり、
密度波理論が広く信じられている。ところが一方でスパイラルアームが密度波である場
合、銀河ディスク面上での星の運動はアームとの位置関係により正確に記述できるが、そ
ういった個々の星の運動から直接的に密度波であることを検証されたことはまだない。こ
れは密度波であるかどうかを検証するのに十分な精度をもったデータがまだないのが原因
であるが、1990 年代にヒッパルコス衛星が観測をおこなって以来我々の銀河の個々の星
の運動が正確にわかりつつあるし、今後さらに、JASMINE など、次世代の位置天文衛星
があがるにつれて、さらに広範囲に銀河系の星の位置や運動がわかると期待できる。それ
ゆえ、今後銀河のスパイラルアームが物質波であるのか密度波であるのかといったような
事をはじめとしたディスクの力学構造を個々の星の運動から直接的に検証できる時代が来
る。そうすれば、スパイラルアームの物理状態、力学構造の理解が飛躍的に進むことが期
待できる。今後の位置天文観測の発展をにらんで、精度の良い観測データがそろった際に
は密度波かどうかを判別出来るようなスキームを持っておくことは重要である。以下では
スパイラルアームが密度波であるかどうかの判定のための手法を説明する。
■○手法
まず、はじめに銀河のスパイラルアームのピッチアングルが半径によらず一定
の値をとるロガリズムアームを仮定し、ディスクの場所の関数である位相の関数 χ を次式
により定義する。
χ = ln
(r/rg )
− θ tan(i)
(3.1)
ここで、r は銀河中心―天体の距離、rg は 銀河中心―太陽間距離、 i はピッチアング
ル、θ は太陽―銀河中心―天体のなす角である。
次に星の epicyclic 運動の phase を φ により定義する。これは、スパイラルアームの方
向と epicenter から見た星の方向との間の角である(図 3.1 参照)。
この時もし、星の運動が密度波理論に従っているならば同じアーム上に乗るすべての星
は同じ位相関数 χ の値をもつとともに同じ epicyclic phase をもつ。また、アームの本数
36
第 3 章 JASMINE で拓くサイエンス
図 3.1: 位相 χ と epicyclic phase φ の銀河面上での図
が m の時、epicyclic frequency κ は角振動数 Ω − Ωp の m 倍となる [κ = m(Ω − Ωp )]。
その時、dφ/dt = −κ、dχ/dt = Ωp − dθ/dt = Ωp − Ω であるので星の運動が密度波に
従っているならば χ と φ に次の関係が成立する。
φ ≡ mχ + φ0
(mod 2π),
(3.2)
このように、密度波ならばこの χ と epicycle 運動の位相 φ は決まった関係があるの
で、実際にこの関係になっているかどうかを調べることが出来る。具体的には、φ − χ 平
面にプロットすると m 本アームのとき m 本の斜めの線が出る。したがって、それをプ
ロットすれば密度波かどうかわかり、更にアームの本数も解るしくみである。
ここで密度波かどうかをもう少し定量的に見ていく。そのために、誤差の 2 乗和である
次式を定義する。
∆2 ≡
δφ2
i
i
2
σi
,
(3.3)
ここで δφi は次式で定義される。
δφi ≡ min(|φi − φDW (χi )|, 2π − |φi − φDW (χi )|) ,
(3.4)
ここで σi は星 i の位相 φi の分散、φDW (χi ) は、星 i の運動が密度波理論に従っている
3.2 銀河系の力学構造と形成史
37
450
Cepheid Data
Random Model(σ=σcep)
4-arm Model(σ=σcep)
Random Model(σ=0.5σcep)
4-arm Model(σ=0.5σcep)
400
350
250
∆
2
300
200
150
100
50
-20
-15
-10
-5
0
5
10
15
20
m
図 3.2: 誤差 2 乗和 ∆2 をアームの本数 m をパラメータとして表した図。
時の位相である。
そこで、試みに Hipparcos のデータよりセファイドを 80 個用いて解析した例を示す。
また比較のため、星の運動が、密度波に従わず、位相関数 χ に対して、epicyclic phase φ
がランダムである場合(Random Model)、4 本アームが存在し、密度波理論に従い運動
している場合(4-arm Model)、更に、上述の Random Model、4-arm Model で用いた誤
差(Hipparcos のセファイドデータと同じ誤差分散)を半分にしたものをそれぞれプロッ
トした。このプロットを見て解るように、誤差分散が Hipparcos と同程度存在する場合
アームが密度波に従っている場合もそうでない場合も区別がつかない状態である。しか
し、誤差分散を半分にした場合、Random Model、4-arm Model の両者が m = 4 のと
ころで明らかな違いとなって現れる。このように次世代位置天文観測により観測精度が
Hipparcos よりも良くなると密度波かどうかを明らかに出来るようになる。
38
第 3 章 JASMINE で拓くサイエンス
3.2.3 銀河系 warp の構造とアストロメトリ
イントロダクション
我々の銀河系を含め円盤銀河の中には、銀河円盤が平坦ではなく、外側へいくほど銀河
面に対し垂直方向に歪んだ、warp と呼ばれる構造を示すものがあることは古くから知ら
れている。この構造は約半数の円盤銀河で観測されている普遍的な構造であり、銀河進化
を考える上で重要でありながら、その成因については未だ良く分かっていない。また、こ
れは銀河円盤の最縁部の構造であることから、warp のダイナミクスにはダークハローの
構造、特にその形状に関する情報が含まれていると期待される。
さて、今まで知られている銀河系 warp の観測的特徴を簡単に述べておくと、銀経 90 °
付近では銀緯で北向きに捲れ上り、銀河中心から 20kpc 付近で 4kpc 程度の振幅まで単調
に発展している(ここで振幅は、比較的平坦な銀河系中心付近で定義した銀河面に対しど
れくらい捲れ上がっているかで定義される)。しかし銀経 270 °付近では、南向きに 15kpc
くらいで一旦 1kpc ほどの振幅になった後、振幅が徐々に減少し、20kpc では再び中心付
近の銀河面にほぼ一致するという、非対称な形状をしている。これはよく、それぞれ最大
2kpc ほどの振幅をもった m=1 と m=2 の warp の重ね合わせとして表現される。
したがって、少なくとも、2kpc 程度の振幅の warp を励起するメカニズムが銀河系に
は必要とされる。その一例として、次では大マゼラン雲による励起の可能性を考察する。
大マゼラン雲と銀河系 warp
先程紹介したように、銀河系 warp は銀経 270 °くらいで銀緯の南側に発達してい
るが、そのさらに先には大小マゼラン雲が存在するため、古くからマゼラン雲に伴
う 潮 汐 力 が 起 源で は な い か と い う 説が 提 唱 さ れ て い た 。そ こ で Hunter と Toomre
[Hunter and Toomre, 1969] は、大マゼラン雲による潮汐力で観測されているような
振幅の銀河系 warp が形成されるか調査を行ったが、最大でも 100pc くらいのものしかで
きないとされた。ところが彼らの計算では大マゼラン雲だけによる潮汐力しか考えていな
かったが、大マゼラン雲はダークハロー中を運動しているため、ハローに航跡場が生じ、
これも潮汐力を及ぼすことが考えられる。Weinberg[Weinberg, 1998] はこのアイデアを
提唱し、線形近似の下、航跡場による潮汐力も考慮した結果、1-2kpc くらい振幅の warp
が生じ得ることを示した。ただし、この計算は線形であるため、非線型の効果が自然に入
る多体計算による検証が求められる。その目的のため、土屋 [Tsuchiya, 2002] は多体計算
で Weinberg の結果を検証することを試み、1kpc くらいの振幅であれば励起できること
3.2 銀河系の力学構造と形成史
を示した。しかしながら、航跡場の効果を取り入れるには当然、ハローを粒子で表現する
必要があるが、その際、ハローの粒子数が少ないと、離散化に伴うポワッソンノイズの影
響が大きく出てしまう。そして、土屋の計算ではハローの粒子数が 50 万体程度と然程多
くなく、ノイズが結果に影響を及ぼしている可能性があった。そこで、同様の計算をより
粒子数の多いモデルについて行っておくことが必要になる。
そこで土屋 (2002) におけるモデル L と同じハローモデルで、ハローの粒子数を 50 万
体から約 400 万体にした計算を行い、ノイズの影響が生じていたか否かを調査した。こ
こで、大マゼラン雲の初期位置等は土屋 (2002) と同じにしており、T = 6Gyr でおよそ
現在の位置に達するようになっている。また特に理のない限り、大マゼラン雲の質量は
1.0 × 1010 M としている。
まずテスト的な計算として、ノイズの影響を把握しておくために、大マゼラン雲無で計
算を行ったのが図 3.3a である。ハローの粒子数が十分多ければ何も生じないと思われる
が、ポワッソンノイズの影響で m=1 の warp が励起されていることが分かる。ただし、
その振幅は観測されている 2 kpc よりずっと小さく、せいぜい 300 pc 程度のものである。
次に、大マゼラン雲を取り入れて計算したのが図 3.3b である。すると、先程とほとんど
変化がなく、ノイズと区別できない程度に留まっており、観測を説明するような大きな振
幅の warp はできなかった。
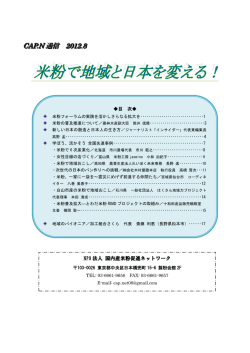
図 3.3: a)LMC を入れない場合の m=1 の warp の振幅の時間変化。実線:0 Gyr、
破線:3 Gyr、点線:6 Gyr に相当。LMC 無でもノイズの影響で数百 pc 程度の
warp が生じる。b)LMC を入れた場合の振幅の時間変化。この場合も LMC 無のと
きと幾ど変化がなく、ノイズレベル程度しか励起できていない。
そこで、大マゼラン雲の質量を大きくしていき、どれくらいの質量であれば観測を説
明できるような warp を励起し得るか調査した。その結果の一部が図 3.4a に示してある。
ここでは、質量として 5 × 1010 M という値を用い、計算を行っている。この場合、力学
的摩擦に伴う落ち込みが速くなるため、この図のみ破線・点線の時間が他とは異なってい
るが、点線の時点がおよそ現在の位置に対応しているのは変わりない。すると、観測から
39
40
第 3 章 JASMINE で拓くサイエンス
示唆されているのはせいぜい 1.5 × 1010 M であるが、そのさらに 3 倍ほどの質量がなけ
れば warp の観測を説明できないことになり、大マゼラン雲起源では説明困難であること
が示唆される。
最後に、ハローの粒子数を 50 万体に落とし、完全に土屋 (2002) と同じ粒子数・モデル
にした計算が図 3.4b である。すると、ポワッソンノイズが大きく効いた影響で、観測を
説明し得るような大きな warp が形成されることが分かる。したがって、土屋 (2002) の
計算では数値的な問題に起因するノイズの影響が効いていた可能性がある。
図 3.4: a)LMC の質量を 5 × 1010 M にしたときの振幅の時間発展。この図のみ、
破線:1.8 Gyr、点線:2.4 Gyr。実線は 0 Gyr のまま。b) 図 3.3b と同じモデル。
ただし、ハローの粒子数は土屋 (2002) と同じ 50 万体に減らしている。したがって、
ポワッソンノイズが図 3.3b に比べ、3 倍程多くなっている場合の計算。この場合は
観測と同じような振幅の warp が励起されているが、ノイズ起因と思われる。
銀河系 warp とアストロメトリ
さて、銀河系 warp の成因が実際なんであるのかという点については未だはっきりしな
いものの、銀河面が外側に行くにつれて傾いていることは明らかな観測事実である。する
と、ダークハローが球対称でない限り、ハローによる重力トルクの影響を受け、歳差運動
として銀河系 warp の運動に現れると予想される。ここでは、アストロメトリ衛星の観測
とからめ、ハローの歪みに応じて、どの程度の回転速度の歳差運動が生じ、それを検出す
るにはどれくらいの観測精度を要求するか、議論する。
ここでは簡単化のためにハローは偏平であり、かつ warp の形状は激しく時間変化して
おらず、定常的なものとする。すなわち、
z (R, φ) = h (R) · cos (φ + Ωp t).
(3.5)
と定める。ここで、h (R) は振幅、Ωp は warp のパターン速で、銀河回転と逆向きが正で
3.2 銀河系の力学構造と形成史
41
ある。振幅は現段階での観測をうまく合わせられるとする、
h (R) =
0.0
(R ≤ 6.5 kpc)
2
[R (kpc) − 6.5] /15 (R > 6.5 kpc)
(3.6)
というモデルを用いた。するとただちに、warp に伴う z 方向の運動として、
vz (R, φ) = [Ω (R) + Ωp ] · h (R) · cos (φ + Ωp t).
(3.7)
という成分が現れることが分かる。
まず、要求されるアストロメトリ衛星の精度評価のためにダークハローの形状によっ
て、どの程度の歳差運動が生じるか知る必要があるが、ここでは便宜上、Sparke と
Casertano[Sparke and Casertano, 1988] のモード理論に基づいて計算を行っている。詳
しくは原論文を参照されたい。ハローモデルとして、ディスクのスケール長の五倍のとこ
ろでディスクとハローの質量が同程度になるような Hernquist モデルを考え、等密度面の
軸比として、q という量を用いると、期待される warp の歳差運動の角速度は
q = 0.6 → 2.2 km sec−1 kpc−1
q = 0.8 → 0.8 km sec−1 kpc−1
(3.8)
の程度となる。参考までに、太陽軌道で 220 km sec−1 は、27 km sec−1 kpc−1 に相
当する。実際に式 3.7 に角速度:Ωp として 0, 1, 2 km sec−1 kpc−1 という値、及び
Ω (R)=220 km sec−1 /R を入れ、プロットしたのが次の図 3.5 である。
60
Ωp=0.0
Ωp=1.0
Ωp=2.0
50
Vz(km/sec)
40
30
20
10
0
-10
7
8
9
10
11
12
13
Radius (kpc)
図 3.5: 歳差運動に伴う、z 方向の速度成分。実線は歳差運動無し、破線は Ωp =
1.0 km sec−1 kpc−1 、点線は Ωp = 2.0 km sec−1 kpc−1 の場合。R = 8 kpc の位
置で vz = 0 としている。
銀河系 warp の歳差運動を検出することを目的にすると、1 km sec−1 kpc−1 程度の精
度は少なくとも欲しい。すると、上図から、5 kpc 離れたところで 3 km sec−1 程度のも
42
第 3 章 JASMINE で拓くサイエンス
のが、銀河面に垂直方向な proper motion の精度として必要である。これは、
100 µas yr−1
(3.9)
に対応する。JASMINE においては、銀河面に垂直方向の位置決定精度は 100 µas 程度
と想定されており、数年のミッションタイムを考慮すれば、十分に捉えることのできる値
であるといえる。
3.2.4 サテライト銀河の進化とアストロメトリ
初めに
現在の標準的な宇宙モデルでは、銀河系のような大きなものは「下から」形成される、
すなわち小さなものが集まって形成されると考えられている。この立場では、単純に考
えると特にハローの星はそれがどのように出来たかをかなり良く記憶しており、位相空
間で見る、例えば (E, J) 空間で見ると綺麗に分離して見えるということになる。DIVA,
FAME では分離は難しいが、 GAIA では十分にわかるといった理論的な見積もりもなさ
れている。[Helmi and de Zeeuw, 2000]
まあ、これが本当ならそれはそれで美しい話であり、我々の銀河がどのようにしてアセ
ンブルしてきたかということに関する重要な情報が高精度アストロメトリから得られると
いうことになる。しかし、本当にそううまくいくのだろうか?
上の Helmi and de Zeeuw の仕事では、サテライト銀河とその構成要素である星の軌
道を N 体計算で調べて、宇宙年齢の間の進化はそれほどドラスティックなものではなく、
「元に戻る」ことが可能であると結論付けたわけであるが、これはある意味、仮定=答み
たいな話になっている。というのは、シミュレーションにおいてサテライト銀河の自己重
力は考慮されている (といっても使っているのは Simon White の 4 重極コードであり、
球対称からのずれが大きいと信用できる答がでているかどうか分からないが) が、親銀河
は外場として与えているからである。 ダークマターもいれた時のサテライト銀河の初期
の質量は 109 M かそれ以上はあるわけで、力学的摩擦の影響を無視するのは現実的では
ない。
力学的摩擦の効果を考えると、話はそんなに簡単ではなくなる。ここでは、その効果は
どのようなものであるかを考えたい。
なお、最初に断わっておくが、今回扱うのは主に銀河ハローであり、ディスク、バルジ
が主なサーベイ対象である JASMINE に直接つながるものではない。銀河面で何ができ
るかについては最後に簡単に触れたい。
以下では、まず、サテライト銀河を剛体 (質点) として扱う時の力学的摩擦につい
て、我々の最近の論文 [Hashimoto et al., 2000] にそって簡単に紹介する。そんなのは
3.2 銀河系の力学構造と形成史
43
Chandrasekhar の時からわかってるのではないかと思うかもしれないが、これが意外に
そうでもない。とはいえ、なにが「正しい」扱いかは本来初めから明らかであり、これま
で何故かそれが誤解されていたというだけの話ではある。次に、サテライトの内部自由度
も考慮した場合について触れる。こちらは理論的にきちんと理解できているとはいいがた
いのが現状である。
質点への力学的摩擦
力学的摩擦が理論的にはどういうものかということは今更いうまでもないが、式として
は例えば以下のようになる。フィールドの粒子の空間分布は数密度 nf の一様分布、速度
分布が速度分散 σ のマックスウェル分布
nf
f0 (v) =
exp
(2πσ 2 )3/2
−v 2 /2
σ2
(3.10)
であるとすると、質量 m 粒子が受ける加速度は
nf Γ
∆vpara = −4 2
σ
m
1+
mf
G(x)
(3.11)
になる。ここで mf はフィールド粒子の質量、erf は誤差関数であり、G(x) は
G(x) =
erf(x) − xerf (x)
2x2
(3.12)
√
また x = vt /( 2σ) である。ここで Γ は
Γ = 4πG2 m2f ln Λ
こんなことは今更なわけだが、ここで ln Λ はなんであったかいうと、無限一様を仮定す
ると 2 体衝突の効果がインパクトパラメータ p が無限大の極限で形式的に発散するので、
上限を入れることからでてくる。物理的には、この上限は例えば系の「典型的な大きさ」
や、密度のスケールハイトということになる。また、実際に密度構造がわかっていればそ
れを使って積分すればもちろん発散はしない。
なお、下限のほうは、質点を考えても交換できる運動量には上限があるので発散は起き
ない。しかし、サテライト銀河のように有限の大きさをもつ場合には、インパクトパラ
メータがサテライトの大きさより小さい時には曲がる角度が質点の場合に比べると小さい
ので、それも考慮する、具体的にはサイズ程度で積分を打ち切る必要があることになる。
この理論にはどこもおかしいところはないが、問題はこれまでの数値計算のほとんど
が Λ = Mg /Ms (質量比) または Λ = Rg /Rs (半径の比) という近似を使っていることで
44
第 3 章 JASMINE で拓くサイエンス
200
varying Λ
constant Λ
Radius (kpc)
150
100
50
past
0
-10
-5
future
0
5
10
Time (Gyr)
図 3.6: 力学的摩擦による LMC の軌道進化。破線は bmax = Rhalo としたもの。
実線は bmax = R(t) (衛星の位置) としたもの
ある。上の理屈からは、親銀河の密度構造を考慮すると R(t) は親銀河の中心からの距離
(時間変化する) として
Λ = R(t)/Rs
(3.13)
とするのがもっともらしい。
というわけで (もちろん実際には数値計算が先にあってその解釈として上の議論を考え
たわけだが)、N 体計算と力学的摩擦を手で入れた数値計算を比べてみた。詳細は我々の
論文 [Hashimoto et al., 2000] を参照していただくとして、図 3.6 で破線は従来のやり方
に従ったもので、有名な Murai and Fujimoto [Murai and Fujimoto, 1980] の結果を良
く再現できている。これに対して実線は理論的にもっともらしいと思われるものである。
特に未来の進化が大きく違い、寿命に大きな差がでていることがわかる。
問題はどちらが正しいかだが、図 3.7 で進化の遅い 2 本が N 体計算と我々の提案
する「もっともらしい」 log Λ を使ったもの、速く落ちるのが従来のものでありこれ
はよろしくないのは明らかであろう。実は最近の論文を見ると、文章では「力学的摩
擦をいれた計算と N 体計算は良く一致した」と書いてあっても、実際にはこれくらい
ずれているという結果になっているものは結構ある (例えば [Jiang and Binney, 2000,
Velázquez and White, 1999] など)。
特に問題なのは、単にタイムスケールだけではなく、軌道進化の様子が違うことであ
る。 従来のとりかたでは、近点で力学的摩擦を過大評価するので、サテライトの軌道は
急速に円形化する。しかし、 N 体計算でも我々の計算でもそういうことは起きないわけ
である。しかし、意外にこんなことがこれまで理解されていなかった。
3.2 銀河系の力学構造と形成史
(N+1)-body
Constant
Varying
1.5
Radius
45
1
0.5
0
0
10
20
Time
30
40
50
図 3.7: 解析的な力学的摩擦を使った軌道進化と N 体計算の比較。上の 2 本が N 体
計算と我々の提案する表式を使ったもの。下の速く軌道が落ちるものが従来の扱い。
内部自由度のある場合
サテライトの内部自由度を考え、潮汐破壊を考慮したら何が変わるだろうか。普通に考
えると、サテライトは質量を失って軽くなるのでその分力学的摩擦は小さくなる。つま
り、質点の場合よりもさらに軌道進化が遅くなると期待される。従来の理論的な取り扱い
は全てそういう前提でやってきていた。
しかし、我々の数値実験の結果はむしろ逆であった。完全に self-consistent な、親銀河
とサテライトの両方を N 体で表現した場合の軌道進化は、サテライトの内部自由度を無
視した場合よりも速かった。これは何か間違っているのではないかという気もするが、実
は他の研究でもそうなっている。つまり、両方 N 体でやった計算と力学的摩擦を手でい
れた計算を比較したもの ([Jiang and Binney, 2000, Velázquez and White, 1999] など)
では、力学的摩擦を適当にに大きくすることで 2 つを合わせていたのである。
これはもちろんサテライトの軌道運動のエネルギーが力学的摩擦以外のメカニズムで失
われていることを意味する。エネルギーの行き先についてはサテライト自体の内部エネル
ギーやはぎとられた粒子の軌道運動などいくつかの候補はあるが、今のところまだ完全に
は理解できていない。ひとつ間違いないことは、サテライト銀河の軌道進化はかなり大き
なものであり、例えば (E, J) 空間で狭い領域にとどまると期待することにはかなり無理
があるということである。もちろん、だからといって過去の情報が得られないというわけ
ではないが、単純に現在の状態が過去の化石であるとはみなせない。
46
第 3 章 JASMINE で拓くサイエンス
ディスクでのサブシステムの進化
JASMINE が見るであろうディスクを考える。サテライトの残すタイダルストリームに
あたるものは散開星団が作るわけだが、その同定は可能だろうか?問題の一つは非常に数
が多いこと、もう一つはもともと分布している位相空間が狭いために分離が難しいことで
あろう。が、最近出来た星団であれば十分狭い範囲にいるわけで、 例えば過去 10 億年程
度の間に出来たものについてはある程度戻れるかもしれない。 これは距離決定精度にも
よるが、 GAIA では困難なディスクの形成・進化にかかわる情報を得ることができるか
もしれない。より詳細なモデル化、検討が必要な領域である。
3.2.5 力学構造の構築
銀河系の力学構造を知ることは、何度か前述したように、バルジやディスクの構造その
ものを理解するとともに、それらの形成史をも明らかにし、銀河系形成史、ひいては銀河
全般の形成史解明に結びつくものである。また、力学構造を知ることは、自己重力多体系
の緩和過程や定常状態の物理的解明というアカデミックな研究にとっても重要である。で
は、力学構造とはなんだろうか。その構成要素の星々の密度分布、速度分布、全重力物質
による重力ポテンシャルなどがあげられるが、一番基本的なものは、その構造の重力を形
成している構成要素(重力物質)の位相分布関数である。位相分布関数が出せれば、それ
を用いて(ポアッソン方程式を通じて)重力ポテンシャルや速度分布、密度分布などが導
出できる。
さて、この位相分布関数をアストロメトリから得られる情報(天球上の星の位置、つ
まり2次元的位置、天体までの距離(年周視差による)、固有運動(視線に垂直方向の速
度))の5次元情報、および視線速度を加えた6次元情報(つまり、3次元的な位置と3
次元速度ベクトル)から構成物質(重力を担うすべての物質、つまり重力物質)の分布関
数を導出しなくてはいけない。ただ、アストロメトリや視線速度観測により、“星” の6
次元位相分布関数が分かるからといって、これがそのまま力学構造を知ること、つまり “
重力物質” の重力ポテンシャルや位相分布関数を知ることにはならないことを注意すべき
である。先ず、星の位置と速度の情報だけでは、その星の場所の重力ポテンシャルが分か
らないことは容易に分かるであろう。もし、星の加速度が分かれば、その地点での重力ポ
テンシャルは容易に分かる。しかし、速度だけでは分からない。さらにもう一つ課題があ
る。それは、観測されるのは、重力物質のうちのごく一部だということである。つまり、
観測される星以外にも観測限界より暗い星、さらには星以外のダークマターが存在すると
思われる。力学構造の構築とは、こういったすべての重力物質の位相分布関数やそれらが
3.2 銀河系の力学構造と形成史
作る重力ポテンシャルを知ることにある。つまり、観測されている一部の星のデータから
見えていないすべての物質がつくる位相分布関数や重力ポテンシャルを構築する必要があ
る。では、どのように構築するのか、その方法について以下で記述する。
(1) モデルとの比較
上述したように、観測される一部の有限の星のデータから、すべての重力物質による重
力ポテンシャルや位相分布関数を求めるにはどのようにしたら良いのだろうか。そのため
には、先ず理論的なモデルによる力学構想のテンプレートを用意する。そのモデルでは、
重力ポテンシャルの形状が仮定され、それをもとに位相分布関数は理論的に評価されてい
る。このようなテンプレートを考え得るだけ多く用意しておく。そして、そのテンプレー
ト、つまり理論的に評価された位相分布関数(確率分布関数)と観測値とを比較すること
によって(相関をとる)、どのテンプレートが一番観測データをうまく説明できるかを統
計的解析によって見つける。そうやって、得られたテンプレートが、観測事実をもっとも
よく説明できる力学構造となる。このような手法により力学構造の構築を行う必要があ
る。では、どのようにテンプレートを作るのだろうか。以下で詳しく述べていく。
(2) 定常状態モデルについて
力学構造のモデル作りにおいて、基本的な仮定として構造は定常状態だと考える。この
仮定は、近似的に正しいと思われる。銀河系は、その力学的時間尺度は宇宙年齢に比べて
極めて短い。従って、今の時期が、非常に特別な時期であるとは考えにくいからである。
しかしながら、定常と矛盾するような観測事実が見つかってくる可能性もある。1つは、
バー構造である。バーを通じての角運動量のやりとりなど非定常になっているかもしれな
い。しかし、銀河系のバーは他の銀河とも共通しているので、その進化はかなり遅く、定
常からのずれは小さいと推測される。また、そのずれは観測にかかると期待される。さ
らに、銀河系の渦巻き構造は、角運動量の再配分やヒートアップを行っている可能性もあ
る。また、近づく、もしくは衝突してきた矮小銀河から潮汐力で物質をはぎ取って、その
残骸があり、非定常である可能性も強い。以上のように、現実的には銀河系は非定常であ
るかもしれないが、そのずれは小さいと仮定できること、またそうだとすれば定常状態か
らの摂動で構築できる。従って、先ずは、定常状態を仮定し、そのモデルの構築を考える
のが最善であると考える。さらに、定常状態を考えるメリットはもう1つある。それは、
一般に、位相分布関数は、3次元的位置、3次元運動量、時間の7つの関数であるが、定
常状態の場合は、最大でも3つの関数で済む。つまり、定常状態の場合、ほとんど規則軌
道で銀河は形成されていると考えられるので(粒子数が無限大の極限、つまり、無衝突系
では、平均場の影響が、カオス運動の起因となる短距離での衝突過程より強いため、集団
的な規則運動をすると考えられる)、その位相分布関数は “強いジーンズ定理” により、位
相分布関数か、孤立積分量で書かれている [Binney and Tremaine, 1987]。3自由度の系
であるので、孤立積分量の数は、最大で3つである。このように、定常状態を考えると変
47
48
第 3 章 JASMINE で拓くサイエンス
数の数が少なくて済む大きなメリットがある。たとえて言うならば、3次元的な人間の体
(銀河系という6次元系)が、実は DNA という1次元情報(3つの積分量でかける関数)
で形作られているようなものである。
(3) トーラス構築法
では、実際にどうやって、定常的な重力ポテンシャル中の位相分布関数を構築して
いけばいのだろうか。先ず、前述したように定常ポテンシャル中の位相分布関数は、一
般的に3つの孤立積分量の関数となっている。つまり、まずやるべきことは、定常ポ
テンシャル中でのこの積分量を見つけることである。その方法の1つとして、トーラ
ス構築法と呼ばれる方法がある [McGill and Binney, 1990, Binney and Kumar, 1993,
Kaasalainen and Binney, 1994]。それを以下で紹介する。
先ず、なにかある積分可能なハミルトニアン H0 (J) を考える。J は、この系の積分量
(作用変数)である。また、作用ー角変数 (J, θ) が (q, p) の関数として解析的に解けるも
のとする。それに対して、与えられた定常ポテンシャルに対応するハミルトニアンを H
とする。このハミルトニアンが、新しい作用変数 J のみでかけていれば、この J が孤立
積分である。このような J を見つけることがトーラス構築法である。この方法では、H0
の作用ー角変数 (J, θ) から、H の作用ー角変数 (J , θ ’
) への変換の母関数 Sn を求める。
母関数とは次の変換式を満たすののである。
S(θ, J ) = θ · J − i
Sn (J )ein·θ
(3.14)
n=0
ここで、n は正数の組である。
この母関数によって、作用ー角変数は次のように変換される。
J = ∇θ S(θ, J ) = J +
nSn (J )
(3.15)
n=0
θ = ∇J S(θ, J )
(3.16)
次にこの変換の母関数をどうやって求めるかであるが、H が J だけにしか依存しないと
いう条件を課すことで以下のように逐次的に求めていく。
(i) 各 (θ, J ) について、trial の Sn を用いて 3.15 式を使って、対応する J を求める。
(ii)q(θ, J), p(θ, J) から H(q, p) を求める。
(iii) 同一の J に対して、θ を変えていき、Np 点をサンプルとして選ぶ。そのサンプルに
対して、
χ2 [Sn (J )] =
1 (H − H̄)2 ,
Np
を最小にするように Sn (J ) を各 J 毎に決める。ここで、H̄ ≡
(3.17)
1
Np
θ
H である。こう
やって、Sn (J ) が求まったので、各 (θ, J ) から、(θ, J) が求まり、それを経て、(q, p) に
変換することが可能である。
3.2 銀河系の力学構造と形成史
(iv) 実際の解析方法
次にやるべきことは、この J の関数となる位相分布関数を仮定することである。実際
は、バルジやディスクなど要素構造によって異なるので、それを α という index で表し、
その位相分布関数を fα (J ) とする。この関数形を仮定する。すると、この関数は、(iii) で
(q, p) を計算できるので、任意の位相空間 (q, p) に存在する確率分布関数を与えるもの
である。さらにこれらの分布関数を用いれば、様々な観測量が計算可能である。従って、
この確率分布関数と観測データとの相関をとり、最も確からしいものを選ぶ。さらに、異
なった重力ポテンシャルでも同様の手続きを踏み、観測データをもっとも説明できる重力
ポテンシャルと位相分布関数の組み合わせを求める。
以上が力学構造構築方法の骨組みである。しかし、ここで2点ばかり注意しておくこ
とがある。先ず第一点は、位相分布関数から求めた密度分布が、ポアッソン方程式を通じ
て、最初に与えた重力ポテンシャルと無矛盾になっていなくてはいけない。この条件を満
たすものだけを選ぶ必要がある。
もう一点は、実際の観測データは、明るさや色で選択された特定の星々だけであるとい
うことである。今までは、純粋に力学的な観点しか考えていなかったが観測の選択効果に
よって、力学的にある偏ったデータのみ抽出されている可能性もある。この選択効果を考
慮した、確率分布関数を考えなくてはいけない。そのためには、星の初期質量関数や星の
形成史を仮定し、モデル化が必要である。そのモデルを使って、現在の星の色や明るさを
評価しておく必要がある。この情報をもとに、ある星のタイプ(色、明るさ)を観測する
選択確率を計算し、力学的に求めた位相分布関数と組み合わせたものが、本当の観測に対
する確率分布関数を与える。調べるモデルやパラメータの数が増えることになり、解析は
難しくなるが、大量の観測データとの比較によって、これらの量が求まった場合は、現在
の力学構造のみならず、星の初期質量関数や星形成史という銀河系の形成史に関わること
まで求めることができるという利点がある。
あと、現実は最初に述べたように、非定常である可能性がある。その場合は、観測デー
タには定常モデルとの比較だけでは消せない残差が残るはずである。その際は、定常モデ
ルから摂動的に非定常状態へ拡張していく工夫が必要となろう。
(5) トーラス構築法以外の他の方法:シュバルツシルトの方法
説明したトーラス構築法以外にも観測データと比べるテンプレートを作る別の方法があ
る。その一つが、シュバルツシルトの方法である [Schwarzschild, 1979]。この方法は次の
通りである。先ず、重力ポテンシャルを与える(ポアッソン方程式を通じて、密度分布を
計算する)。その定常ポテンシャルのもとで、初期条件を変えて、たくさんのテスト粒子
に対して軌道を計算する。ある粒子が、ある場所に滞在する存在確率を求めると、密度分
布はそれに比例する。各々の軌道に対応するこの存在確率をある重みで足しあげて、最初
に仮定した密度分布を再現できるようにする。この方法が、シュバルツシルトの方法であ
49
50
第 3 章 JASMINE で拓くサイエンス
る。実は、この重みが分布関数に対応している。与えられた重力ポテンシャル中で、どう
ような軌道で構造が形成されているか、無矛盾に軌道を構築できる。
この方法は、トーラス構築法に比べて、計算は容易である。しかし、軌道など多くの量
を記憶しておく必要があり、トーラス構築法に比べて記憶容量が圧倒的に多くなる。ま
た、位相空間の分解能も軌道の数で決まるという制限があり、位相空間をくまなく一様に
覆うことは困難である。従って、任意の位相空間点での確率分布関数は求めることはでき
ず、観測データとの比較が直接的にはできないデメリットがある。ただし、今後、この方
法についても吟味し、トーラス構築法との比較検討や、場合によっては両者の併用を考慮
する必要はあると思われる。
(6) 今後の戦略
JASMINE をはじめ、VERA, GAIA といった高精度アストロメトリ観測が予定され、
精度良い情報が大量に出てくることになる。データが出てくる前に、ここで説明した方法
であらかじめ多数の理論のテンプレートを用意しておく必要がある。なるべく早急に検
討して、手法の完成が肝要である。実際にこの手法がうまくいくのか、答えを知っている
銀河系の模擬カタログにこの方法を適用して、どれぐらい正しい答えを引き出すことが
出来るのか、試験を行っておく必要もあるだろう。国内でも Japan Torus Construction
Project チームを作って検討を行って行く予定である。
3.2.6 長距離力系の統計物理学
通常の気体や流体などのような短距離力系では、統計力学が確立され広く応用されてい
ることは周知の事実である。短距離力系では、衝突過程を通じて、強いカオスが効いてお
り、系のミキシングが効率的に起こっていく(混合性)[中野藤生・服部眞澄, 1994]。その
結果、緩和が起こり、系は熱平衡状態へと向かう。そして、緩和後は、マックスウェル・ボ
ルツマン分布が達成されている(いつみても、ほとんどその状態)。しかし、長距離力系の
場合、粒子数が多くなればなるほど、短距離での衝突の効果よりも平均場の効果が大きく
なってくる。そのため、カオス性は弱まり、系はなかなか緩和しない。しかも、長距離力で
あるため、系全体がコヒーレントに集団運動を行う場合もあり、グローバルな状態が変遷
していく [郷田直輝, 2000]。また、十分長時間たって、系のエルゴード性が達成された後、
確かに長時間平均すれば、マックスウェル・ボルツマン分布なのだが、“いつみても” その
分布をしているわけではない。短距離力系の場合は、系をお互いが独立と見なせる部分系
(その中の粒子数は十分多い)に分けることができる。したがって、観測すると、その部分
系のアンサンブル平均を見ることになる [丹羽敏雄, 1981]。緩和後は、エルゴードが成立
しているので、アンサンブル平均は長時間平均に等しい。従って、緩和後、観測すると、
長時間平均状態、つまり熱平衡分布を常に観測できることになる。ところが、長距離力系
3.2 銀河系の力学構造と形成史
の場合、そうはいかない。長距離力という性質のため、お互いが独立とみなせる部分系に
分けることができない。従って、観測は、部分系のアンサンブル平均をみることにはなら
ない。よって、緩和後は確かに長時間平均すれば、熱平衡分布をしているが、短時間の観
測では熱平衡状態は見られないのである。実際、1 次元重力多体系(シート系)で準平衡
状態を遷移続ける [Tsuchiya et al., 1994, Tsuchiya et al., 1996, Tsuchiya et al., 1997]。
エルゴードが成立した後でもある。しかし、全くでたらめではなく、その遷移の仕方にあ
る種の普遍的な規則性がみられる。実際は、力学系はハミルトニアンが与えれれば、原理
的にはその系の力学的振る舞いはすべて決まっているはずである。完全にでたらめで、早
く緩和すれば、ミクロな運動は実際的に予測不可能でもマクロな状態は、その後は熱平衡
分布を使い、評価は可能である。しかし、前述したように重力系は熱平衡状態がいつも実
現はしていないが、全体が集団的運動を行い続け、そこに規則性がある。その規則性は、
ハミルトニアンから実は決まっている、その関係を見つけることが興味深い。そのヒント
は、位相空間 (全エネルギー一定の Γ 空間)のトポロジーにある。その位相空間上に現れ
る、トーラス領域とカオス領域の比率とそのサイズ分布などが規則性を見つける鍵だと考
えられる。このように、自己重力系のような長距離力系での集団運動の規則性をいちいち
数値実験するのではなく、何か原理的な法則性から導き出すことができるのかどうか、そ
の新しい統計物理学とも言うべきものの構築が重要であると考える [郷田直輝, 2000]。そ
の際、カオスなどの物理的概念の発展や N 体計算等による数値実験は確かに重要かつ必
要である。しかし、現実の系で実際どのように成っているのかを知ることは理論のさらな
る進展にとって重要である。自然科学の分野では、観測結果や実験結果があってこそ画期
的な進歩が見られる。そういう意味では、我々はまだ実際の自己重力多体系がどのような
(準)定常状態にあるのかも知らない状況である。先ずは、JASMINE 等のアストロメト
リ情報をもとに、銀河系の力学構造を構築し、そこを見定めることが今後の進展の礎にな
ると期待される。
3.2.7 高精度距離決定による高精度化学組成決定
星の化学組成はいうまでもなく銀河系の形成、進化を探る強力なツールである。さら
に、この化学組成情報に星の速度情報を組み合わすことができれば、化学組成と速度間
に成り立つ相関が明らかになり、さらなる強力なツールになりうる。また、金属量欠乏
星の化学組成パターンは個々の超新星における元素合成の情報を保持していることから
(e.g., [Shigeyama and Tsujimoto, 1998])、元素合成の理論と観測された組成パターンか
ら、様々な元素の起源を明らかにすることができる。そしてさらにその結果が、化学組成
から銀河の進化を探る研究へとフィードバックされていく。例えば、太陽近傍で観測され
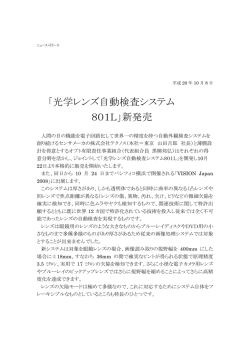
ている星の [Mg/Fe]-[Fe/H] 図 を見てみると (図 3.8)、基本的に [Mg/Fe] の値は [Fe/H]
51
52
第 3 章 JASMINE で拓くサイエンス
が少ないハロー星ではほぼ+0.4 の値を取り、ある値を境にして [Fe/H] の増加とともに
[Mg/Fe] の値は減少していく傾向が見られる。その減少をし始める [Fe/H] が実は thin
disk 星と thick disk 星で異なることが明らかになってきた。thin disk 星では [Fe/H]> −1
で [Mg/Fe] が減少をし始めるが、thick disk 星は [Fe/H]=–0.4 辺りまで減少を始めるこ
とはないのである。これは thin disk と thick disk の形成のタイムスケールの違いを反映
していると解釈できる。[Mg/Fe] が減少するのは、Ia 型超新星から大量の鉄が放出される
ことによるものだが、この Ia 型超新星の親星の寿命が 10 億年ほどと II 型超新星に比べ
てかなり長いことから、[Mg/Fe] の値が宇宙時計として機能する。図 3.8 が示す [Mg/Fe]
値の振る舞いは、thin disk が数 10 億年のタイムスケールで形成されたのに対し、thick
disk はわずか数億年という短い時間で形成されたことを示唆する。
ところが、星の化学組成の決定にはいまだ大きな不定性を伴う。ここで、最近脚光を
浴びている 2 つの星を例に挙げて、化学組成決定の現状を考察してみる。これらの星
(CS22949-037, CS29498-043) は、マグネシウムやシリコンといった軽い元素の量が鉄に
比べて異常に高い星であり、これまでの星では決して見られなかった化学組成パターンを
持っている ([Depagne et al., 2002, Aoki et al., 2002, Israelian et al., 2003])。星の化学
組成を導出する際の基本的なパラメータは 3 つある。effective temperature (Teff ) 、表面
重力 (log g)、metallicity ([Fe/H]) である。これら 3 つのパラメータが 3 者によって求め
られた結果を表 3.1 に示した。
star
CS22949-037
CS29498-043
Teff
4900
4900
4300
4400
log g
2.5
1.5
1.5
0.6
[Fe/H]
–3.54
–3.9
–3.44
–3.75
author
Israelian (2003)
Depagne (2002)
Israelian (2003)
Aoki (2002)
表 3.1: 星の大気モデルの fundamental parameters
Teff 、[Fe/H] の値はそれほど結果に違いは見られないが、表面重力においてはおよそ一
桁もの違いがでている。この表面重力の評価の大きな違いを反映して、導出された化学
組成比は表 3.2.2 に示されているように大きく異なる結果になっている。表面重力は一般
に鉄の ionization equilibrium の情報から計算される。その場合、non-LTE 効果をどの
ように取り入れるかによって大きな違いが生じてしまう。ところが、星までの距離が正確
に測られていれば表面重力を絶対等級(および Teff )から直接導出することができ、表面
重力の評価の不定性は著しく減少する。実際、現在正確に表面重力が測られている星は
3.2 銀河系の力学構造と形成史
53
図 3.8: ハロー、thick disk、thin disk に属する星々の [Fe/H]([Mg/H]) に対す
る [Mg/Fe]([Mg/Fe]) 値の進化 ([Fuhrmann, 1998] Astronomy and Astrophysics
338 161–183(1998) より, p.171 Fig.11 の引用)。
CS22949-037
CS29498-043
[O/Fe]
3.26
1.98
[O/Fe]
3.26
1.98
[Ca/Fe]
-0.01
0.35
[Ca/Fe]
-0.01
0.35
[Na/Fe]
0.69
2.09
[Na/Fe]
0.69
2.09
Israelian (2003)
Depagne (2002)
Israelian (2003)
Aoki (2002)
表 3.2: 2 つの星における化学組成比
Hipparcos によって精度良く距離の測られた太陽から数 10pc 内にある星に限られる。
このように星の化学組成を正確に評価するためには、星の距離を高精度に求めることが
要求される。JASMINE によって銀河面上の 10kpc 内の星について、高精度距離決定が実
現した場合の化学組成分野に与えるインパクトは計り知れないほどのものがあると言えよ
う。またさらに、星の高精度距離決定は星の正体を、つまり星の evolutionary stage を押
さえる意味でも極めて重要である。[Christlieb et al., 2002] によって、[Fe/H]=–5.3 とい
う超金属量欠乏星の存在が明らかになった。その星の大きな特徴は炭素や窒素が極端に多
54
第 3 章 JASMINE で拓くサイエンス
いということである。特に、炭素は鉄に対して太陽比の約 1 万倍もの値を示している。実
はこの炭素や窒素の起源がこの超金属量欠乏星がどのようにして生まれた星かを解く鍵を
担っているのである。これらの元素は星の進化過程の中で作られていったものなのか、あ
るいはもともとそれらの元素を豊富に含むガスからこの星が生まれたのか? 前者の場合、
この超金属量欠乏星は種族 III 星であることを強く示唆する ([Shigeyama et al., 2003])。
その答えを得るためには、この星がどのような進化段階にあるのかを突き詰めることが不
可欠である。そしてそのために、この星までのおよそ 10kpc という距離を正確に測り、そ
れより星の絶対等級、表面重力を高精度に評価することが求められる。
3.3 星形成と恒星物理
3.3.1 アストロメトリで探る星の初期質量関数
Introduction
銀河は,多数の星を主要天体として含む。そして,銀河の観測的性質は構成要素として
どういう質量の星がどれだけあるかに強く依存ずる。そればかりか,星は紫外線や可視光
赤外線などの電磁波の放射源であるばかりでなく,進化の最終段階における超新星爆発や
質量放出などにより,銀河内のガスの進化に対して強く影響するが,その効果は星の質
量によって大きく異なる。そのため,星の初期質量関数は,星形成率と並んで,銀河の形
成・進化を研究する上で非常に重要なのである。
ところが,星の初期質量関数の研究はかなり不充分であると言わざるを得ない。観測的
には,我々の銀河系の中での平均的な初期質量関数はある程度わかってきているが,星形
成領域や環境効果による違いがあるかどうかについては依然として確たる答えは得られて
いない。また,理論的に初期質量関数を説明する試みは過去数十年間にわたって行われて
きたにもかかわらず,いまだに説得力をもつ理論モデルは得られていない。そのため,銀
河形成過程や初期進化を研究する場合や爆発的星形成が起きている他の銀河を研究する場
合など,現在の我々の銀河系と大きく異なる環境下での星形成を知る必要がある場合に,
どういう初期質量関数を用いるべきかはっきりしない。また,確固とした理論モデルの構
築のためにも,星形成領域での違いの有無は重要な情報である。
ここでは,JASMINE による観測によって,星の初期質量関数の研究においてブレイク
スルーになる重要な情報が得られる可能性について議論する。
3.3 星形成と恒星物理
55
星の初期質量関数の観測の現状
星の初期質量関数を次のように,質量範囲でいくつかに区切ってパワーローで近似して
表現する。[Kroupa, 2001]
ξ(m) ∝ m−αi = mγi .
(3.18)
ここで,m は形成時の星の質量であり,ξ(m) は質量範囲 m から m + dm に形成された
星の数を表す。α についての観測結果をまとめたのが,図 3.9 である。[Kroupa, 2001]
図 3.9: さまざまな星形成領域における観測された α の分布。横軸は各観測領域での
星の平均質量を表す。黒丸および黒三角はそれぞれ我々の銀河系と大マゼラン星雲
の星形成領域に関する観測を Scalo(1998)[Scalo, 1998] がまとめたもの。白三角は
Muench, Lada & Lada (2000)[Muench et al., 2000] によるトラペジウム星団の
観測。図は [Kroupa, 2001], Monthly Notice of roial Astronomical Sciety, 323,
p.231–246(2001), p.233, Fig.1 の引用。
これらの観測の平均をとると以下のようにまとめることができる。
56
第 3 章 JASMINE で拓くサイエンス
α0 = +0.3 ± 0.7 (0.01 ≤ m/M < 0.08)
α1 = +1.3 ± 0.5 (0.08 ≤ m/M < 0.50)
(3.19)
(3.20)
α2 = +2.3 ± 0.3 (0.50 ≤ m/M < 1.00)
α3 = +2.3 ± 0.7 (1.00 ≤ m/M ).
(3.21)
(3.22)
図 3.9 を見ると,星形成領域による alpha の変化が大きく,環境効果があきらかにある
ように感じる。しかし,それぞれの星形成領域で観測されている星の数は通常数百個以下
であることに注意する必要がある。この数は十分ではなく,統計的な揺らぎの効果が無視
できない。統計誤差の影響は図 3.10 と図 3.11 から見ることができる。
図 3.10: 星の数が減少したときの初期質量関数の揺らぎ。初期質量関数としては,
(2)-(5) 式を仮定した。実線は星の個数が 106 個の場合。点線は星の個数が 103 個の
場合についての2回別々の試行の結果。図は [Kroupa, 2001], Monthly Notice of
roial Astronomical Sciety, 323, p.231–246(2001), p.235, Fig.2 の引用。
図 3.10 は,初期質量関数として (2)-(5) 式を仮定した場合の統計的揺らぎの効果を入れ
た数分布である。実線は星の個数が 106 個の場合であり,点線は星の個数が 103 個の場合
についての2回別々の試行の結果である。103 個の場合には,ある程度の揺らぎが見える
3.3 星形成と恒星物理
が,全体的な印象はそれほど大きく違うわけではない。しかし,α に直すためには,微分
することになり,値は大きく異なる。質量範囲を図 3.10 の b1 から b6 に区切って,星の
個数を 102 個から 106 個の間で変化させながら,初期質量の分布をつくり α を計算した
のが図 3.11 である。
図 3.11: 星の数が減少したときの α の揺らぎ。白い小さな丸印は図 3.9 の観測
点。図は [Kroupa, 2001], Monthly Notice of roial Astronomical Sciety, 323,
p.231–246(2001), p.235, Fig.3 の引用。
星の個数が 103 個以下になると,α が大きく揺らぐことがわかる。統計的な α の揺ら
ぎは観測点のばらつきと同程度の大きさであり,星形成領域によって α が異なるかどうか
は,はっきりしない。
また,観測を解析する場合には,個々の星が星団に属するかどうかの判定や,星形成
領域においては,前主系列段階での進化モデルの不定性など,他の問題も多く存在する。
[Hillenbrand, 2000] また,フィールドで観測する場合には L-K バイアスの問題が深刻に
なる。
57
58
第 3 章 JASMINE で拓くサイエンス
JASMINE による星の初期質量関数の観測
JASMINE によって,我々の銀河系の円盤部の星の質量関数は厳密に求められる。個々
の星の距離がはっきり測定されるために,星団の場合の帰属問題や,フィールド星におけ
る L-K バイアスの問題がなくなる。また,サーベイされる星の個数が非常に大きいため
に,前述したような統計誤差の問題がほとんどなくなる。
また,星形成は大半が巨大分子雲において集団的に起きていると考えられていること
から,フィールド星も形成時には個々の星団として形成されたものが多いと思われる。
JASMINE は,距離のみならず固有運動のデータももたらすために,星の位相空間での分
布がわかる。星団が破壊されてフィールド星になっても位相空間では星団の名残をとどめ
ている可能性が強い。このことを利用すると,フィールド星を用いても,星形成領域によ
る初期質量の違いが存在するかどうかについての研究が可能になるだろう。これが可能に
なるとサンプル数が多いことや,銀河の星の多数を占める円盤部のフィールド星について
の星形成時の環境効果が調べられることになり,その意義は大きい。
以上のように,非常に重要であるにもかかわらず,現在でも完全な理解にいたっていな
い星の初期質量関数の問題に対して,JASMINE のデータはブレイクスルーをもたらす
可能性が十分にあると考えられる。
3.3.2 星形成領域の分布
3.3.3 thin disk 最外縁の星生成領域
JASMINE によって、「thin disk の最外縁の構造」について、他にないユニークな研究
が可能になる。このような領域は「銀河形成期の星生成」を探る重要な対象であるだけで
なく、
「星生成研究へのフィードバック」をかけられるような、シンプルな環境を擁した星
生成の” 実験場” としても際立っている。JASMINE によって大きなサイエンティフィッ
ク・ゲインがあると考えられるこの比較的あたらしい分野について、上記3つの大きな
テーマに分けて以下に概観する。
thin disk 最外縁の構造
われわれの銀河系でも銀河半径 RG =15 kpc を越えるようなところでは、太陽系近傍
で典型的な構造(例えば、渦状腕とそれに付随する分子雲/星生成領域)は見られなくな
る。実際、分子ガスの表面輝度や星の密度分布も RG =13.5 kpc を境に極端に減少するこ
3.3 星形成と恒星物理
とが知られており、このような「thin disk 最外縁」の領域には太陽系近傍とは大きく異
なる構造/環境が存在していることがわかる。HI 21cm の電波観測で RG = 30 kpc まで
の thin disk の構造が調べられているが、とくに太陽系が属する「local arm」や、数 kpc
離れた外側にある「Perseus arm」の外側には、
「outer arm」 (RG > 10kpc) と呼ばれる
電波でのみ認識されている渦状腕が一つあること以外は明確な構造はわかっていない。
このような領域の構造や物理状態を調べるには、星をトレースとして距離を導出すると
ころからはじめる必要があるが、そのような観測は最近10年間において着実に進歩しつ
つある。とくに、可視分光観測による分光距離の導出が精密化したことにより、thin disk
の最外縁における RG = 20 kpc 近くの星生成領域までの距離が高い精度で求められたこ
とは特筆に値する [Smartt and Rolleston, 1997] 。また、電波・赤外線による thin disk
の最外縁における星生成領域の探査も大きくすすんだ。基本的には IRAS データをベース
として、電波によるフォローアップで星生成領域を同定する仕事がいくつかのグループに
より進められつつある [Wouterloot et al., 1990, Snell et al., 2002, Santos et al., 2000]
。
JASMINE により、このような遠方の全星生成領域の同定が可能となり、thin disk の
最外縁の銀河構造を決定的にすることができる。まず、高精度な距離決定により、outer
arm を越えた領域の構造を、われわれからの距離にして 15 kpc 程度まで(RG < 20 kpc)
明確に描くことができる。この距離でも、明るい中高質量星であれば K バンドで 13 等
級程度になるため十分 JASMINE のターゲットとなる。また、このように同定された領
域の視線方向の速度を分光フォローアップにより導出すれば、RG < 25 kpc の遠方ま
での銀河回転曲線が明確に描ける可能性がある。これにより、銀河回転以外の運動成分
(streaming など)も明らかにすることができるであろう。以上のような JASMINE によ
るシステマティックな観測により、長年の懸案であった” 力学的距離” と” 測光距離” の矛
盾も完全に解消されることになる。
銀河形成期の星生成
このような thin disk の最外縁は、1)渦状腕による摂動など外的な擾乱が少ない、2)
ガス密度が低い、3)金属量が低いといったことから、RG < 13.5 kpc の領域と比較して、
大きくことなる環境にあると考えられる。例えば金属量については、RG = 25 kpc までい
くと、水素に対する酸素の量で言って 12 + log[O/H] ∼ 7.0 程度まで落ちると考えられて
いるが、これは太陽近傍の値(∼ 9)と比較して 1/100 もの低さになっている。thin disk
の最外縁は、このような物理状況から、矮小銀河 (dIrr, blue compact dwarf galaxies な
ど)や QSO の吸収線系(DLA: Damped Lyman-α systems)などと同様の星生成環境
にあると考えられる。これは、銀河系の歴史で言うと、「thick disk 形成期」の環境に近
59
60
第 3 章 JASMINE で拓くサイエンス
いと考えられる。
JASMINE によって、thin disk 最外縁の星生成領域の同定が行われ、その研究がすす
められれば、“銀河形成期” の星生成の物理についての理解が大きくすすむと考えられる。
JASMINE の結果だけでも、距離と固有運動から、thin disk 最外縁の星生成領域の起源
についての知見が得られる。さらに、可視・赤外・電波によるフォローアップから、この
ような領域における基本的な星生成プロセスが明らかになるであろう。それはすなわち、
DLA などに代表される高赤方偏移の QSO 吸収線系における星生成の詳細を「間近に」
みることと等価といえる。
また、このような星生成領域の観測を通じて、銀河半径に対する金属量の減少のカーブ
(metallicity gradient)を RG ∼ 25 kpc 程度まで描くことができるようになれば、「銀河
系全体におけるグローバルな星生成」のモデルを検証することができるようになり、われ
われの銀河系の形成についての大きな知見が得られると考えられる。
星生成研究へのフィードバック
上記のように、thin disk 最外縁は、低ガス密度および力学的な外乱が少ないという
特殊な環境にあるが、RG < 13.5 kpc には見られないこのような極限状況は、複雑な
geometry や kinematics にじゃまされずに、単純化された星生成のプロセスを調べること
のできる「実験場」としての価値が高い。例えば、
「星生成のトリガーは何か?また、その
トリガーの後にどのように星生成がすすんでいくのか?」という星生成研究の最も基本的
な問題について、わかりやすい単純な観測対象から大きな知見が得られる可能性がある。
星生成トリガーとして考えられているメカニズムのうち最も重要なものとして「超新星
爆発」があげられるが、近傍の星生成領域における超新星の影響については、視線方向
の複雑さもあり、明確な結果がなかなか得られない状態にある。これに対して最近、thin
disk 最外縁において、DRO による HI 観測でたいへん興味深い巨大超新星残骸が発見
された [Stil and Irwin, 2001] 。この超新星残骸はきれいな球形をしており、このような
thin disk 最外縁の領域が外乱のない単純な環境にあるために、このようなかたちを保つ
ことができたことを示唆している。この超新星残骸には HI からつくられる過程にあると
考えられる分子雲が付随しており [Digel et al., 1994] 、星生成の兆候をしめしているこ
とも赤外線の観測から明らかになっている [Kobayashi and Tokunaga, 2000] 。このよう
な星生成の「実験場」の研究から、「超新星爆発による星生成」という宇宙における基本
的な過程を明確にすることができるかもしれない。
超新星爆発に起因する星生成は、基本的にトリガーが「一度だけ」かかったものであ
り、数多くの星生成イベントを繰り返してきた複雑な太陽近傍の星生成分子雲と比較して
ひじょうに単純だと考えられる。そこで、例えば、一つのトリガー・イベントによる” 真
3.3 星形成と恒星物理
61
の” 初期質量関数(IMF:Initial Mass Function)を出すことができるかもしれない。ま
た、超新星残骸のタイム・スケールは、電波観測などから大まかな見積りができるため、
近傍の星生成領域の研究から予想されている低質量星の若い天体の基本クラス(ClassI,
II, III)のタイム・スケールが正しいかを検証することができる可能性も高い。さらに、
星生成のモードには観測的に”cluster formation” と” association formation” の2つが
存在することが知られているが、この2つのモードの原因についても、電波観測と赤外線
観測の比較から明らかにできるかも知れない。
JASMINE は、こういった星生成領域を多数見つけ出すことにより、この研究を加速す
るだけでなく、これらの遠方の星生成領域までの距離という、これらの研究にもっとも必
要な基本量を提供する。
褐色矮星
JASMINE にとって、褐色矮星は暗い天体である。褐色矮星の絶対等級は、MK =
13 ∼ 16 であって、観測にかかる褐色矮星は、 数十パーセク以内にある近傍の天体であ
る。従って年周視差もおおきく、30 mas 以上である。地上観測の年周視差の誤差は、1
mas の程度なので、JASMINE の観測でそれ以下の誤差で年周視差が求まれば、意味の
ある観測と言える。観測にかかる褐色矮星は、まだ冷えきっていない年齢が 数 Gyr 以下
の天体であり、運動学的には Young disk population に属すると考えられる。
褐色矮星の研究に欠ているのは、絶対等級の情報とそこから求まる有効温度の評価であ
る。JASMINE は絶対等級をもとにして近傍の褐色矮星を同定するため有益な情報が得
られる。L dwarf, L/T transition object, T dwarf を検出することにより、色-等級図上
において、L/T transition の過程を明らかにすることができると考えられる。
褐色矮星は、質量が 0.08 M より小さく、重力収縮の過程で中心温度が水素燃焼温度
に達する前にコアが縮退し、縮退圧が重力と釣り合った天体である。縮退した天体なの
で、半径の質量依存性は、小さく、0.001 M = 1 MJ (木星質量) と 0.08 M の間で
は、半径は、木星半径、RJ = 0.1 R 程度である。半径が一定であるため、光度、L と
有効温度、Tef f は、
4
L = 4πσRJ2 Tef
f,
(3.23)
の関係で強く相関している。褐色矮星の光度、有効温度は、質量、年齢の関数 L =
L(M, t), Tef f = Tef f (M, t) として与えられ、褐色矮星は冷え続ける。例えば、0.04M
の天体は、年齢 5Gyr で 10−6 L , Tef f = 600K まで冷える。
スペクトル型 L 及び T は、OBAFGKM 系列の低温側の延長として定義された。M
dwarf は、可視域の TiO, VO の吸収バンドで特徴づけられ Tef f > 2200K の天体であ
62
第 3 章 JASMINE で拓くサイエンス
る。これに対し L dwarf は、Tef f =1300∼ 2000K の天体で TiO, VO のバンドは消え、
FeH, CrH 及びアルカリ金属、K I, Cs I が可視域スペクトルに現れる。H2 O, CO が近
赤外スペクトルでは顕著であり、SED 全体からは、光球中にダストがあることが推定
される。SED は赤く、J − K = 1.3 ∼ 2.0 である。2003 年の時点で、100 個以上の L
dwarf が見つかっている。T dwarf は、Tef f = 800 ∼ 1300K の天体で、可視域には、Cs
I, K I の broad absorption wing が現れる。赤外スペクトルは、H2 O と CH4 が支配す
る。SED から判断して、光球中にはダストがない。近赤外域での色は青く、J − K ∼ 0
である。これまでに 30 個程の T dwarf が見つかっている。L/T transition object は、
Tef f ∼ 1300K の天体で、赤外スペクトルには、CO と CH4 が共存する。近赤外の色は、
中間的で、J − K ∼ 0.7 である。
年周視差の知られた天体の数はまだ少なく、Brown dwarf の色-等級図は不完全である。
年周視差の知られた L dwarf は 20 個、T dwarf は 4 個、L/T transition object は、1
個である。図は、brown dwarf の MJ − (J − K) diagram である。J − K ∼ 1 のあたり
から、右下に J − K ∼ 2 まで伸ているのが、L dwarf の系列である。 左下、J − K ∼ 0
付近にあるのが、T dwarf で、右下の L dwarf と T dwarf の中間 J − K ∼ 1 のあたりに
ある一点が L/T transition object である。この MJ − (J − K) diagram 上での brown
dwarf の振る舞いは、brown dwarf が 時間に関して単調な cooling track (L = L(M, t))
を持つことを思えば、複雑である。これは、内部構造ではなく、大気が複雑な振る舞いの
原因であることを意味する。
大気の複雑な振る舞いを説明するのが、Tsuji の Unified Cloudy Models (UCMs) で
ある。UCM 大気において、T < 2000K の領域では、dust condensation の条件がみた
されている。一方 T < 1800K の領域では、dust は critical radius を越えて成長し沈降
してしまう。よって、1800 < T < 2000K の領域においてのみ小さな平衡状態の dust
が大気中に浮遊できる。この cloud layer は、L dwarf (1300 < Tef f < 2200K) におい
ては、photosphere に大きな影響を及ぼすが、T dwarf (Tef f < 1300K) においては、
photosphere より深く埋もれてしまい影響が現れない。これが、L/T transition を自然
に説明する。MJ − (J − K) diagram において、左図の実線は、質量を変えたときに
UCM を用いた evolutionary track がどのようになるかを示している。右図の実線は、
isochrone である。
MJ − (J − K) diagram の観測的不完全さを補うためには、より多くの brown dwarf
の年周視差を知る必要がある。ここでは典型的 T dwarf, Gliese 229B を例にとって、
JASMINE の限界等級を評価してみる。Gliese 229B と同じ明るさの天体の絶対等級
は、MK = 15.5 である。この天体が、K = 17 で観測されるとき parallax は、50 mas、
K = 19 で観測されるなら parallax は、20 mas である。一方 JASMINE による parallax
measurements の誤差は、K = 17 で 90 µas、K = 19 で 400 µas。K = 19 でも地上で
3.4 年周視差に関するバイアスについて
図 3.12: MJ − (J − K) diagram. 黒点が観測点である。左図の実線は、質量に依
存する evolutionary track である。右図の実線は、 isochrone である
えられる parallax error, 1 mas より小さいので、これを検出限界として、差し支えない
であろう。JASMINE では、parallax とともに JHK の測光も行うため MJ − (J − K)
diagram 上での data point がただちに求まり brown dwarf の同定は容易であろう。限
界等級を K = 19 として、luminosity function から、見積もると、L dwarf は、1 平方
度に 50 個、100 平方度に 5000 個、T dwarf は、1 平方度に 5 個、100 平方度に 500 個
で、L/T transition object も 100 平方度に 50 個程度は、見つかると期待される。
3.4 年周視差に関するバイアスについて
3.4.1 Introduction
HIPPARCOS 衛星のデータがアクセス可能になって、その解析方法に関するいくつ
かの論文が発表されている。従来の地上観測では、高々数十パーセクより近い星の年
周視差を得るに過ぎなかった。HIPPARCOS により、その距離は 2kpc 程度にまで広
がり、200 個程度の距離指標となる変光星の距離を知ることが出来るようになった。こ
こには、いくつかのバイアスの存在が指摘され、解析方法により結果が異なっている。
HIPPARCOS 後の多くの方法は、Pont ら [Pont, 1999] にまとめられている。バイアスに
ついては Arenou Luri 1998[Arenou and Luri, 1999]、Feast らの方法については Feast
Catchpole[Feast and Catchpole, 1997] と Koen Laney[Koen and Laney, 1998] を参考
にする。これに関して、我々が独立に Monte Carlo シミュレーションにより調べた。
[Yamada et al., 2003]
63
64
第 3 章 JASMINE で拓くサイエンス
Cepheids は、Period-Luminocity 関係 (以後 PL 関係)
MV 0 = δ log P + ρ.
(3.24)
に従うことはよく知られている。PL 関係のゼロ点は LMC までの距離を与え、従って宇
宙論的な距離の議論のベースを与える。同様に、Metalicity-Luminocity 関係 (以後 ML
関係)
MV 0 = αR [F e/H] + β.
(3.25)
に従う RR Lyraes もまた µLM C を与る。これらの星の距離を精密に測ることの宇宙物理
学的な意義については別の章に譲る。しかしながら、HIPPARCOS の精度をもっても、
これらの変光星のほとんどの年周視差のデータは、負の値も含む非常に大きな誤差を含む
ので、それに伴う困難な問題がある (図 F.6 参照)。このような場合、その変光星までの距
離 d は d = 1/π では計算できない。従って、ゼロ点を決定するには、HIPPARCOS 年周
視差のアンサンブルから統計的に推定することになる。
Ratnatunga と Casertano [Ratnatunga and Casertano, 1991] は、統計的にバイアス
のない見積りについて、有名な Lutz-Kelker バイアス [Lutz and Kelker, 1973] を補正す
るために、精度の低いデータおよび負の年周視差の完全な使用を許すような最尤法を提
案した。辻本他 [Tsujimoto et al., 1998] は、彼らの方法を HIPPARCOS RR Lyrae に
適用して、[F e/H] = −1.6 での RR Lyrae の絶対等級 MV (RR) = 0.59 であると結論し
た。これは、Walker[Walker, 1992] の LMC の RRLyrae のデータに従って ML 関係 (即
ち MV (RR)-[Fe/H] 関係) の勾配 0.20 を用いれば、µLM C = 18.41 に相当する。
さらに、Feast と Catchpole[Feast and Catchpole, 1997] は、Lutz-Kelker バイアスが
ない方式の加重された平均から Cepheid PL 関係のゼロ点を見積もる新しい方法を提案
した。HIPPARCOS Cepheids を用いて、以前 [Laney and Stobie, 1994] に知られてい
る結果より 0.2 等級明るいという結論、µLM C = 18.70mag を得た。この値は、数々の
LMC の距離決定 [Gibson, 2000] のなかの上限値で、すこし大き過ぎるという意見もある
(例えば [Freedman et al., 2001])。しかし、Pont[Pont, 1999] はこの方法が最も精密な値
であると結論し、また Lanoix[Lanoix et al., 1999b] はモンテカルロシミュレーションで
それを確認した。問題を Hipparocs の年周視差から µLM C を決定することに限定したと
しても、µLM C にはまだ大きな不定性が残っている。この不定性は、H0 を決める最も大
きな残された不定性の一つである。我々は Lanoix に類似のアプローチによって、これら
の二つの統計手法の精度について調べた。
3.4.2 Notation
このセクションでは、視差を π で表し、これと区別するために円周率は Π で表すこと
にする。年周視差と距離の単位は、特に断りが無い限りそれぞれミリ秒角 (max) と kpc
3.4 年周視差に関するバイアスについて
65
とする。
関数 G(x, x , σ) は、平均値 x および分散 σ に対応する、x のガウス的な分布関数を
表す。
2 1
1 x − x
.
G(x, x , σ) ≡ √
exp −
2
σ
2Πσ
(3.26)
対数の表記法では、log x が常用対数を、ln x が自然対数を表す。
3.4.3 計算
疑似データの作成方法は、第 F.3.1 章にまとめてある。
直接法は、上で生成したデータから、実視等級 mv と parallaxπ から
MV = mv + 5 log π − 10 − av
(3.27)
で絶対等級を評価し、これと周期から PL 関係を評価しようというものである。第 F.1.2
章で示す変数変換のバイアスと、π が負であるデータをカットせざるを得ないことに伴う
バイアスが効いて、観測精度に依存するが 0.3 等級程度のバイアスは避けられない。
Feast と Catchpole[Feast and Catchpole, 1997] は、上で指摘されるような直接法のバ
イアスを避けるために、
100.2ρ = 0.01π100.2(mV −aV −δ log P )
(3.28)
により各データから 100.2ρ を計算し、この平均値をとることによって ρ を決定する方法
を提唱している。疑似データにこの方法を適用した場合、変数変換によるバイアスは年周
視差ではなく絶対等級に入る。Cepheid の P-L 関係では intrinsic dispersion が 0.21 等
級 [Caldwell and Laney, 1991] 存在し、観測精度が高くなってもこの分散の不定性は避
けられない。ウエイトをかけない単純平均、およびウイエトのかけ方を Koen and Laney
1998[Koen and Laney, 1998] に従った場合、双方を計算したが、観測精度にもよるが 0.1
から 0.2 等級の誤差は避けられない。
Feast らの方法は、σm が小さいことを仮定している。その正当性を確保するため、
Feast らは二色測光を利用した以下のような解析方法を提案している。二色の絶対等級
は、以下のように与えられる。
MB = δB log P + ρB + α∆1 + ∆2
(3.29)
MV = δV log P + ρV + ∆1 ,
(3.30)
色の中央値は以下のようになる。
MB0 − MV 0 = B0 − V0
= (δB − δV ) log P + (ρB − ρV ).
(3.31)
66
第 3 章 JASMINE で拓くサイエンス
Laney & Stobie が色 B-V と周期 P の関係として示した値にしたがって、我々は勾配と
して 0.416 およびゼロ点として 0.314 を採用する。見かけの等級は
V = 5 log r − 5 + MV + AV + εV
(3.32)
B = 5 log r − 5 + MB + AB + εB ,
(3.33)
で与えられる。ここで AV と AB はそれぞれ式 (F.14) と (F.15) に示され、εV と εB は
独立な二つのガウス分布と仮定する。
観測された color excess が、色光度関係 (3.31) から導かれた B0 − V0 と以下の方程式
により与えられるとする。
E(B − V ) = B − V − (B0 − V0 ),
方程式(3.29)と(3.30)から、本当の色光度関係は以下の式で与えられる。
MB − MV = (δB − δV ) log P + (ρB − ρV )
+∆2 + (α − 1)∆1
Feast らに従って σ(∆2 ) = 0 を仮定し、色補正を使うことによって、実効的な分散は因
子 (α − 1)RV − 1 程度小さくなることが分かる。ここで、AV = RV E(B − V ) である。
Feast Catchpole 方法の論理的な鍵は、σm が小さいことである。Lanoix あるいは Feast
およびその他が述べているように、値 σ(∆2 ) = 0 と α = 1.4 を使うと、因子は 0.32 にな
る。もし σ(∆1 ) ∼ 0.2 ならば、実効的な分散の値は 0.07 以下になる。もし σ(∆2 ) の値が
σ(∆1 ) に比べて大幅に小さくなければ、実効的な内部分散は高々以下の式程度に小さくな
るに過ぎない。
((α − 1)RV − 1)2 σ(∆1 )2 + RV2 σ(∆2 )2
(3.34)
∼ 0.176
この式の最終的な値は、(F.12) を用いて得た。
我々は、最尤法の一つである Ratnatunga ら [Ratnatunga and Casertano, 1991] によ
る方法を評価した。しかし、結果は Feast[Feast and Catchpole, 1997] らの方法と同程度
のバイアスを含んでしまう。この理由は、Ratnatunga の方法が、式の導出仮定で一様分
布を仮定したからである。そこで、データから分布の巾を計算するように、この手法を改
良した方法を提案する。詳細は、第 F.3.2 章にまとめた。
3.4.4 計算結果
まず、Ratnatunga の方法で、星の分布を一様と仮定した場合と、べきをデータから
フィットした場合の比較について述べる。図 3.13 の右の図に、両者の場合の比較を示し
3.4 年周視差に関するバイアスについて
図 3.13: 左の図は、HIPPARCOS に相当する精度で Ratnatunga の方法を用いて
解析した場合の、100 回の試行結果の分布図である。疑似カタログを作る時のパ
ラメーターの入力値は、破線で示した。左の図の左側は、分布のべきをデータから
フィットした場合、右側は一様分布を仮定した場合である。一様分布を仮定した場
合、σm として大きな値を返す時に、ρ が大きな値に偏っていることが分かる。左の
図は、同じ図を DIVA 精度の場合について示した。
ている。分布を一様と仮定した場合、σm として大きな値を返す場合に ρ にも大きなバイ
アスがかかっていることが分かる。右図に示したものは、観測精度として HIPPARCOS
程度のものを仮定しているので、バイアスは分散に隠れて良く分からなくなっている。
DIVA 程度の精度を仮定したものを、右図の二つに示す。より高精度の観測に対応するシ
ミュレーションを行なうと、分散は小さくなるが、一様分布を仮定すると、ρ のバイアス
は残っていることが分かる。
べきをフィットするように改良した Ratnatunga の方法では、試行の結果の平均値は ρ、
σm ともに入力値と一致する。また、分散は観測精度を向上させるに従って小さくなる。
図右で、この方法を観測精度に対してプロットしてみる。Feast らの方法は、観測精度を
向上させてもバイアスが無くなっていない。Cepheid 変光星の PL 関係の内部分散はゼロ
ではない。また、式 (3.34) で指摘したように、それぞれの色の分散の独立性によっては、
色補正をおこなっても十分に内部分散がゼロでない効果を消すことは出来ない。この結
果、Feast らも指摘しているように、σm がゼロでない効果がきいて、バイアスが現れて
しまったと考えられる。一方、改良した Ratnatunga 法では、観測精度が向上するにつれ
てバイアスも分散も小さくなっている。
67
68
第 3 章 JASMINE で拓くサイエンス
図 3.14: 左図は、べきをデータからフィットするように改良した Ratnatunga の方
法で、さまざまな観測精度の場合に 100 回試行した場合の、結果の分布図である。
ρ、σm ともバイアスはなく、観測精度が向上すると分散も減少していることが分か
る。右図は、ρ の決定精度に注目して、観測精度に対して試行の平均値と分散を示し
たもの。実線の誤差棒と×印は改良した Ratnatunga 法のもの、破線の誤差棒と三
角は Feast らの方法を示している。
3.4.5 HIPPARCOS データへの適用
次に、HIPPARCOS のデータを解析する。HIPPARCOS の Cepheid に対して、Feast
の方法および一様分布を仮定した Ratnatunga を適用すると、ρ = −1.432 となる。これ
に、だれかの LMC での結果 17.27 を適用すると、µLM C = 18.682 となる。RR Lyrae
に関しては、同じく β = 0.908 を得る。この値は、µLM C = 18.404 に対応する。
我々の改良した Ratnatunga の方法では、それぞれ ρ = −1.431 及び β = 0.908 とな
り、あまり変わらない。その理由は明らかである。我々の改良した方法では、σm が大き
な場合にバイアスが大きく、そして σm が小さい場合はバイアスが小さい。改良法により
バイアスを小さくしても、σm が小さい場合、その効果はほとんどない。HIPPARCOS の
変光星のデータは、Ratnatunga の解析では σm ∼ 0 を返す。この結果はあきらかにおか
しい。しかし、そのようなデータでは、改良による結果の違いはほとんど見られない。し
かし、図で示したように、HIPPARCOS 程度の精度では、モンテカルロシミュレーショ
ンの分散は非常に大きい。σπ として HIPPARCOS に相当する値を、さらに等級の限界を
HIPPARCOS にあわせて 12 等級とすると、分散は Cepheid で 0.148 程度、RR Lyrae
で 0.299 程度になる。両者の値は、まだこの範囲で不定であると結論できる。数十 mas
程度の精度で 15 等級程度の暗さまで観測できると、バイアスも分散もともに 0.01 等級程
3.4 年周視差に関するバイアスについて
図 3.15: 将来の観測も含むような、より高い精度における観測でのバイアスの傾向。
度まで押えられるので、Cepheid のゼロ点、従って µLM C や球状星団の年齢などに決着
をつけることが出来る。
3.4.6 まとめ
距離指標の等級は、どの精度で決定することが要求されるだろうか。HST のキープロジ
ェクトにおいては、Hubble 定数 H0 が 10% の精度で決定されたと言っている。H0 の値を
10% 精度で決めるというのは、HST の当初の目標値である。ここで言う 10% で決定され
たという意味は、最小値が Saha et al.[Saha et al., 1999] の出した値 H0 dLM C /50kpc =
60 ± 2km s−1 Mpc−1 、最大値が Madore et al. 1999[Madore et al., 1999] の出した値
H0 dLM C /50kpc = 72 ± 3km s−1 Mpc−1 で、中心値が (66 ± 6)km s−1 Mpc−1 であるとい
うことである。それぞれの観測値に 1σ で 3% から 4% の誤差がある上、dLM C = 50kpc
あるいは µLM C = 18.5 に含まれる不定性は考慮されていない。LMC の距離は、図 F.5
に示すように、観測対象や解析方法などによって、中心値で dLM C = 45 ∼ 55kpc で 10%
程度、さらに個別のデータは 1σ で 10% 程度の誤差を含む。Hubble 定数で 10% という
決定精度を目標とするなら、µLM C 、遠方の Cepheid それぞれの中心値、1σ 誤差を 2%
69
70
第 3 章 JASMINE で拓くサイエンス
程度まで押さえ込む必要がある。
距離決定精度と等級の決定精度は、Pogson の法則に従う。10% は 0.2 等級、2% を要
求するならば 0.05 等級の決定精度が必要となる。実視等級の観測精度は 0.005 等級から
0.02 等級程度なので、むしろこれを絶対等級に焼きなおす距離決定精度がこういった解
析の精度を決める。上で見たように、では、HIPPARCOS 精度の 1mas 程度では、バイ
アスは手法によっては 0.3 等級程度、バイアスが小さい手法を開発できたとしても分散は
1σ レベルで ±0.1 等級以上存在する。たった一例である我々の宇宙で解析を行なう場合、
この分散の範囲でパラメーターは不定である。図 3.15 では Feast らの方法および直接法
の場合、図 3.14 右では Feast らの方法と改良した Ratnatunga の方法の比較を行なって
いるが、100µas 程度ではまだ 0.1 等以上のバイアスと分散を持っている。
さらに、宇宙年齢の問題においては、球状星団の年齢決定の問題を含む。130 億年程度
のところでは、年齢が 10 億年違うと主系列ターンオフが 0.06 等ずれる。従って、10 億
年の精度で宇宙年齢を決定するためには、星の明るさを 0.06 等級の精度で決定する必要
がある。0.06 等の精度を得ようと思えば、もう一桁精度の高い、JASMINE 精度の観測
は、是非必要となる。
HR 図は球状星団の年齢にも関係するが、星の進化のモデルの検証において非常に重要
である。この分野では、O 型星が重要だが、HIPPARCOS データではこの種の星の正確
なデータはほとんど無い。O 型星は明るいので、parallax の精度が向上して 1 ∼ 2kpc 程
度まで距離が精度良く決定できる範囲が広がれば、この分野に対して重要なデータを十分
な数で提供することができる。
星の進化に関しては、Open cluster のような等質なデータが重要となる。Open Cluster
は、HIPPARCOS 精度で 10% 以内の精度を得られる 100pc 以内にはたった 2 個しかな
いが、500pc にすれば 200 個まで増える。これにより、十分精度良い統計的な議論が可能
となる。
新星は、距離からエネルギーが推定される。従って、距離決定が正確になれば進化モデ
ルに制限が付く。また、惑星状星雲 は良い距離決定指標になる。
連星系の観測は、星の相互作用と進化の情報を持ち、また超新星を引き起こしたり、
compact 天体等とも関係する。質量と明るさ、進化の道筋の決定には距離決定が重要で
ある。十分距離が離れた相互作用のない連星系は、星の進化モデルのチェックとなる。
銀河の力学構造においては、銀河のできるだけ広い部分に関して速度と位置、即ち正確
な距離が決定できることが必要となる。JASMINE の精度は、ちょうど我々の太陽系から
見て銀河中心まで、反対側は銀河の端まで、ほぼ我々の銀河系の半分を 10% 精度で観測
できる。これは、まだ力学構造の解明に十分とはいえないが、飛躍的な進歩をもたらすこ
とは間違えない。
なお、今のシミュレーションでは、疑似カタログの分布は球対称である。しかし、今後
3.5 Astrometric Microlens
観測が進歩すると、遠方の変光星はディスク形状の影響を受ける。数は、N (r) ∝ r 3 よ
りむしろ r 2 で増えるだろう。その理由においても、Ratnatunga の解析を行なう場合は、
分布をちゃんとフィットする必要がある。
3.5 Astrometric Microlens
3.5.1 重力レンズ
位置天文的重力レンズへのブレークスルー
時として、量的変化は質的変化をもたらす。実際、数マイクロ秒の精度に到達すると、
マイクロ重力レンズはマクロレンズに変貌する。
例えば、我々の銀河内の星もしくは MACHO が、LMC や銀河中心といった 10 kpc
オーダーの距離にある光源に対して、レンズとして働く場合を考えてみる。重力レンズの
典型的なスケールはアインシュタイン・リング半径で、角度にすると、およそミリ秒であ
る。これは通常の光学望遠鏡での角度分解能の限界を大きく下回る。よって、明るさの変
化だけが観測可能なので、いわゆる「光度曲線」だけでレンズに関する情報を決める必
要があった。MACHO の場合、「相対速度 (の視線に垂直な成分)」、「レンズ質量」、「レ
ンズまでの距離」、「視線に対する最近接距離」の 4 つのパラメータに対して、光度曲線
は「増光率」と「増光時間」の 2 個の情報しか持ち合わせない。よって、パラメータ空間
に縮退があった。これまでは、銀河の質量分布モデルを用いて、確率的に最も確からしい
MACHO 質量の「推定」にとどまっていた。アストロメトリの観測量である光中心位置
は、重力レンズ効果により楕円運動する ([Walker, 1995, Jeong et al., 1999])。この楕円
(2 つのパラメータ) がサブミリ秒の大きさなので、高精度アストロメトリ衛星により観測
可能である。その結果、レンズパラメータ間の縮退が解ける。つまり、MACHO 等のレ
ンズパラメータ、特に、質量が確定できる。
ケプラー運動による楕円運動は周期運動であるが、重力レンズによる楕円運動は全く違
う。よって、多数回の観測をすれば、これらは区別出来る。最適な回数は観測対象天体の
等級・個数等に依存するので、この検討は今後の課題である。
なお、SIM、GAIA は可視光であるが、近赤外の JASMINE の場合、銀河中心方向の
レンズに対して圧倒的に有利である。よって、JASMINE を用いた観測によって、褐色矮
星型の MACHO だけでなく、銀河中心方向の巨星崩壊型のブラック・ホールの発見そし
て、存在確率の議論ができるようになる。頻度等の詳しい評価を今後行ないたい。
71
72
第 3 章 JASMINE で拓くサイエンス
系外惑星による重力レンズ
我々が暮らす地球のような環境は、宇宙において特別なのか、ありふれたものなのか、
という古くからの疑問に答えるのが、系外惑星科学である。この系外惑星科学は、間違い
なく、21 世紀の天文学の主流の一つになるであろう。従来からのドップラー法は、木星
のような大型惑星かつ、水星のような短い公転軌道のものに制限されていた。さらに、食
をおこす場合を除き、軌道面の傾きの不定性のため、質量は下限値しか与える事が出来な
かった。位置天文観測では、主星の視線に対する横の動き (楕円になる) から、惑星の存
在を知ることができる。これにより、長周期の系外惑星の発見が可能となる。軽い惑星の
場合、主星の運動がなす楕円は極めて小さい。
こういった状況に対しても、重力レンズ効果が期待できる。重要なのは、銀河内の星が
作る重力レンズの典型的大きさであるアインシュタイン・リング半径がおよそ 1 天文単位
である事である ([Mao and Paczynski, 1991, Gould and Loeb, 1992])。よって、地球軌
道程度の系外惑星でさえ重力レンズ効果に大きな寄与をする事が最近の研究により明らか
にされてきた。具体的には、最近接距離がアインシュタイン・リング半径程度の「強レン
ズ」の場合、地球質量程度でも、数十マイクロ秒程度の大きな歪みが楕円運動に生じる
([Safizadeh et al., 1999])。よって、JASMINE 等によりじゅうぶん検出出来る。最近接
距離が大きな「弱レンズ」の場合、効果は惑星の質量に正比例するので、木星質量程度で
さえマイクロ秒程度にとどまる ([Asada, 2002b])。よって、検出は大変困難であるが、大
きな最近接距離のため確率が大きいので、考慮に値するかもしれない。褐色矮星なら数十
マイクロ秒の効果になるので、恒星・褐色矮星の連星の検出は大いに期待できる。重力レ
ンズ効果は質量に直接依存するので、ドップラー法のような軌道面の傾きの不定性による
問題がない事を付け加えたい。
3.5.2 重力理論の検証
基礎物理学へのインパクト
重力レンズ効果はもともと銀河の星によるものだけではない。我々太陽系の重力も大変
重要である。太陽による重力レンズ (時間遅れ) は、およそ 1.7 秒の曲がり角を作る。現
在では、VLBI 観測 (約 500 マイクロ秒の精度) により、アインシュタインの一般相対性
理論が 0.01% の精度で確かめられている (レビューとしては、[Will, 1993])。数マイクロ
秒では、0.0001% の精度で検証可能である。アインシュタイン理論の有力な対抗馬である
スカラー・テンソル理論は、多くの素粒子理論家によって精力的に研究されている「超弦
3.5 Astrometric Microlens
理論」から、その低エネルギー極限での自然な帰結として示唆されている。そして、重力
レンズ効果の精密測定によって、このスカラー・テンソル理論への強い制限を与える事が
できるので、素粒子物理学へのインパクトも大きい。場合によっては、一般相対性理論か
らのずれという大発見の可能性も秘めている。この場合、アストロメトリという天文学観
測によって、新しい物理学の扉を開く事になる。事実、低エネルギー極限とはいえ、スカ
ラー・テンソル理論を地上の高エネルギー加速器で検証するのは、特殊なシナリオ (高次
元理論等) を持ち込まない限り、現時点のエネルギーレベルではとても期待できない。こ
うして、重力理論の検証に関して、JASMINE のような高精度アストロメトリは高い潜在
能力を備えている。
3.5.3 Astrometric Microlensing と JASMINE
JASMINE データの解析においては、太陽系内・系外の天体の重力レンズ効果によ
る、位置のずれの効果が一般に無視できない。太陽系内天体については位置のずれを
予測し、修正することが一般に可能である。一方、太陽系外の天体、特に銀河ディス
ク・バルジに存在する、JASMINE の限界等級よりも暗い星による重力レンズ効果 (e.g.
[Miyamoto, 1995]) では、暗い星の位置を特定できないので、ある星の天球上の位置が真
の位置なのか、それとも暗い星によるマイクロ重力レンズによって位置がずれているのか
が問題となる。すなわち、マイクロ重力レンズは一般には、位置決定へのノイズとして
の、ネガティブな側面をもつ。
一方、見方を変えれば、マイクロ重力レンズ効果はポジティブな側面も持つ。観測して
いる星たちの、マイクロ重力レンズ効果による天体位置のずれを検出することが出来れ
ば、その頻度分布の統計から、銀河系内の暗い星の分布や運動に対する、アストロメトリ
観測とは独立な議論が可能となるからである。
ポジティブ・ネガティブのどちらの側面が強いかは、観測される星の光がマイクロ重力
レンズを受ける確率 τA に依存している。τA ∼ 1、つまりほとんどすべての星がマイクロ
重力レンズ効果を受けていると、見かけの位置が常に揺らいでいることになるので、星の
相対位置が精度よく決定できないことになる。つまりネガティブな側面が強くなる。逆に
τA 1 ならば、ほとんどの星の位置は揺らいでいないので、ネガティブな側面は問題と
ならない。むしろ、あるひとつの星のマイクロ重力レンズ効果による位置ずれを、位置の
ずれていない他の星との相対位置の比較によって検出することが可能となる。このように
して検出できるマイクロ重力レンズ効果の数が十分多ければ、ポジティブな側面が強くな
ることになる。
τA の見積もりを以下に示す。観測しているひとつの星からの光が、もうひとつの暗い
星によって重力レンズをうけると、一般には増光あるいは減光された複数の像ができる。
73
74
第 3 章 JASMINE で拓くサイエンス
図 3.16:
マ イ ク ロ 重 力 レ ン ズ に よ る 星 像 中 心 位 置 の 変 化 (from
[Dominik and Sahu, 2000])。δ|| と δ⊥ はそれぞれ v⊥ に平行な方向と垂直な方
向へのずれを表す。Astrophysical Journal 534, 213-226 より、p220 Fig.4 を引用。
ただ、JASMINE の場合、これらの星の像を直接分解することはできない。その代わり
に、各星像の増光率を重みとした平均の星像中心位置の位置ずれが観測される。いま観測
天体が距離 DS にあって、観測者と観測天体の間の距離 DL のところに、質量 M の暗い
星 (レンズ天体) があるものとする。観測者からの観測天体への視線と、レンズ天体との
距離を b とすると、星像中心の位置ずれの大きさは
δ=
u2
u RE
1 RE
+ 2 DL
u DL
(3.35)
と計算される。ただし、u = b/RE 、RE はアインシュタイン半径と呼ばれる、重力レンズ
の特徴的スケールで、
RE =
x=
4GM
DS x(1 − x)
c2
(3.36)
DL
DS
(3.37)
で与えられる。u は観測天体とレンズ天体との相対運動によって時間的に変化する。時刻
を t、相対運動の速度の視線方向に垂直な成分を v⊥ 、レンズ天体が視線に最も近づくと
きの時刻を t0 、そのときの u を u0 、tE = RE /v⊥ とすると、u(t) =
u20 + (t − t0 )2 /tE
である。この場合の星像中心位置のずれの時間変化を図 3.16 に示す。
いま JASMINE が角度 δA の位置ずれを検出できるものとすると、概算では u ≤ uA RE /(DS δA ) の範囲の u のマイクロ重力レンズイベントが観測可能となる。レンズの質量
3.5 Astrometric Microlens
75
関数を ψ(M )、レンズの密度分布を ρ として、光学的厚み τA は
1
∞
ρ(x)
(3.38)
π(uA RE )2
M
0
0
2 δA
DS
M̄
−3
1
(3.39)
5 × 10
10µas
0.5M
8.5kpc
と見積もられる。ただし M̄ = M ψ(M )dM である。銀河系ディスクの質量密度のモデ
τA =
DS dx
ψ(M )dM
ルとして、スケール半径 3.5kpc、スケール高さ 300pc、太陽近傍での質量面密度 50M
pc−2 の指数関数的ディスクを仮定すると、銀緯 <2 °では銀河面全域で 1 × 10−3 < τA <
5 × 10−3 、銀緯 <7 °では銀河面全域で τA > 1 × 10−4 と計算される。したがって、マイ
クロ重力レンズの、位置決定へのノイズとしてのネガティブな影響は、ほとんどの星で問
題にならない。
JASMINE での典型的な値として、δA = 10µas、M 0.5M 、DS = 8.5kpc とする
と、uA 200 となり、RE よりかなり大きい b をレンズ天体が通過しても、位置ずれ
を理想的には検出できる。また、図 3.16 のような軌道を描いて位置がずれている期間
= uA tE = 20 年程度である。このような長いイベントでは、パララックス効果、つまり地
球の公転によって位置が図 3.16 の軌道からさらにずれる効果も観測できる。
ただ、JASMINE の観測期間は数年しかないので、位置ずれの軌道がすべて見られる
わけではない。そこでイベント検出効率のシミュレーションを行った。星像中心位置が
20µas の精度で求まったものとして、マイクロ重力レンズによる星像中心の位置ずれを、
パララックス効果も考慮に入れて、軌道の最小自乗法フィッティングによって検出できる
効率を求めたところ、図 3.17 のような結果を得た。uA > 20 では検出効率は非常に小さ
くなることがわかる。この制約のため、理想的な場合に比べ、マイクロ重力レンズイベン
トとして検出できるイベント数は 2 桁程度下がることになる。JASMINE は数億個の星
を観測するので、マイクロ重力レンズ効果が観測できる星の数は 103∼4 個程度と見積も
られる。これだけの数の重力レンズが検出できれば、銀河面内の質量分布に対し、従来の
重力レンズ観測よりも詳細な統計的議論ができると期待される。
以上に見たように、10µas スケールの位置天文観測におけるマイクロ重力レンズ効果
は、ポジティブな側面が強く、検出の意義は大きい。JASMINE のデータから、この効果
を考慮に入れて解析していくことが重要である。今後さらに詳細なシミュレーションを進
めていく。
76
第 3 章 JASMINE で拓くサイエンス
図 3.17: マイクロ重力レンズイベント検出効率のシミュレーションの結果。uA > 20
では検出効率は非常に小さくなることがわかる。
3.5.4 位置マイクロレンズ現象によるダークマターの質量とサイズの決定
導入
ダークマターの大部分は非バリオン的物質であることが CMB 観測や複数の元素
量 の 観 測 と 初 期 宇 宙 の 元 素 合 成理 論 か ら 強 く 示 唆 さ れ て い る [Spergel et al., 2003,
Benoı̂t et al., 2003, O’Meara et al., 2001] 現実には、バリオン的物質の構成について
も決着はついていない [Fukugita et al., 1998] 。バリオン的物質の中でブラックホー
3.5 Astrometric Microlens
77
ルや褐色矮星のように高密度でコンパクトな天体 (MACHOと呼ばれる) は、マイク
ロレンズ効果によって検出できるということが 1986 年に Paczyński によって提案され
[Paczyński, 1986] 、1990 年代に実際に光度曲線が複数のグループによって観測された
[Alcock et al., 2000, Lasserre et al., 2000] 。一方で、極限散乱現象の観測を説明する天体
として、0.1 から 10 木星質量で 1-100AU 程度の大きさを持つ低温ガス雲の存在が指摘さ
れている [Gerhard and Silk, 1996, Kamaya and Silk, 2002, Walker and Wardle, 1999]
。
一方、JASMINE 計画をはじめとする位置決定精度 10µ 秒角を目指した観測プロジェ
クトが計画されている (電波観測では VERA 計画 [日本]、可視光観測では SIM[米国] や
GAIA[欧州])。これらの計画に触発され、1990 年代中ごろから位置マイクロレンズレンズ
効果を利用したレンズ天体や光源に関する研究が増加しはじめた。レンズ天体の質量、イ
ンパクト・パラメータ、横断速度を位置マイクロレンズ効果を受けた光源の軌道から求める
方法は過去に多くの研究者によって研究されている [Paczyński, 1995, Paczyński, 1998,
Miralda-Escudé, 1996] 。しかし、ここでレンズ天体の正体を知ることを目的とした場合、
その質量のみを求めるのでは不十分である。理由は同じ質量を持った複数のレンズ天体の
候補 (ブラックホール、白色矮星、褐色矮星、低温ガス雲など) を区別できないからであ
る。レンズ天体の質量の他にサイズを観測的に求めることができれば、密度を求めること
ができこれらの候補をすべて区別することが可能となる。そこで、次のセクション以降で
はレンズ天体のサイズの効果を考慮した位置マイクロレンズ現象の光源の軌道を求め、そ
の観測可能性を議論する。そこでは、球対称で光学的に厚いレンズ天体を考える。一般に、
レンズ天体のサイズの効果が観測可能な量として現われれるまれであるのだが、過去の観
測により運動が特定されている天体 (ヒッパルコス天体など) の中にレンズ天体のサイズ
の効果が観測可能な量として現われる天体が 49 天体見つかっている [Takahashi, 2003] 。
有限の大きさを持つレンズ天体による位置マイクロレンズ効果
u = (<
ϕs − ϕ
< l )/θE 。ここで、
■像の軌道 次のような無次元距離ベクトルを定義する:<
ϕ
< s 及び ϕ
< s はそれぞれレンズ天体と光源の角位置、θE は角アインシュタイン半径で
θE = (4GM/c2 )(Dls /Dl Ds ) で定義される。ここで、M はレンズ天体の質量、 G は
重力定数、c は光速で、Dl 、Ds 、Dls はそれぞれレンズ天体までの距離、光源までの距
離、レンズ天体と光源間の距離である。である。レンズ天体と光源が最接近時を時間の原
点 t = t0 とする。角アインシュタイン半径で規格化したインパクトパラメータを u0 とす
る。このとき、u = |<
u| で定義される無次元距離 u は次のようになる。
u=
u20 + τE2 ,
ただし
τE =
t − t0
。
tE
(3.40)
78
第 3 章 JASMINE で拓くサイエンス
ここで、tE は角アインシュタイン半径の横断に要する時間であり、µ をレンズ天体と光源
の相対角速度とすると tE = θE /µ となる。まず、点状のレンズ天体が横断する際に+像
と−像の重心、+像、−像の軌道を求める。
レンズを受けていないときの光源の位置からのずれを現す+像と−像の重心の位置ベク
トル θ<c は [Dominik and Sahu, 2000]、
θ<c =
u
û
u2 + 2
(3.41)
と現される。ただし、û = <
u/u である。この式は角アインシュタイン半径で規格化してあ
θc の、レンズ進行方向の成分 θcx とそれに垂直な方向の成分
る。この重心位置ベクトル <
θcy は
=
<θc = (θcx , θcy )
−τE
u0
,
。
u2 + 2 u2 + 2
(3.42)
(3.43)
(θx , θy ) 空 間 上 で 図 3.18 の よ う に 現 さ れ 、軌 道 は 次 の 式 で 記 述 さ れ る 楕 円 と な る
[Walker, 1995] 。
(θcy − b)2
θcx 2
+
= 1,
a2
b2
(3.44)
ここで a と b はそれぞれ楕円の長軸と短軸であり、
1
a= 2
,
2 u0 + 2
b=
u0
+ 2)
2(u20
(3.45)
である。図 3.19 では、重心の軌道は太線で表している。θx 軸方向の最大変位は τE =
±τc = ± u20 + 2 のときに実現される。τE = −τc のとき、重心位置ベクトル θ<c は
(θcx (τc ), θcy (τc )) = (a, b) である。θy 軸方向の最大変位は τE = 0 のときに実現され、こ
のときの重心位置ベクトルは θ<c (θcx (τE = 0), θcy (τE = 0)) = (0, 2b) である。
同様に、レンズを受けていないときの光源の位置からのずれを現す+像位置ベクトル
<θ+ は次のようになる。
<θ+ =
−u +
√
2
u2 + 4
û。
(3.46)
これは角アインシュタイン半径で規格化されている。この+位置ベクトル <
θ+ の (θx , θy )
空間での成分は
θ<+ = (θ+x , θ+y )
√
√
−u + u2 + 4
−u + u2 + 4
, u0
, .
= −τE
2u
2u
(3.47)
(3.48)
3.5 Astrometric Microlens
79
図 3.19: 重心 (太線) と
図 3.18: レンズ天体と
+像 (破線) の軌道と各
光源の位置及び+像、−
点での時間。
像、その重心の軌道。
である。式 (3.47) と式 (3.48) から、u2 = u20 [1 + (θ+x /θ+y )2 ] を得、この式と式 (3.47)
の θ+y から u2 を消すと 2θ+y + u0 =
u20 + 4/((θ+x /θ+y )2 + 1) を得る。よって、+像
の軌道は
2
2
θ+x
+ θ+y
−
θ+y
= 0,
θ+y + u0
(for 2θ+y + u0 > 0).
(3.49)
となる。θ+ 軸方向の最大変位は τE = ±τ+ のときに実現し、
√ 1/3 4 √ 1/3
4
2u
+
Q
+ 2u0 − Q
0
√
1
τ+ =
2
2 3 u0 cos 3 arccos(6 3u0 )
ifQ ≥ 0
ifQ < 0
(3.50)
である。ここで、Q = (4u20 − 8/27)u60 である。式 (3.50) は、∂θ+x /∂τE = 0 から得ら
れる u2 の3次方程式 u2 as u6 − 2u20 u2 − 4u40 = 0 の u2 > 0 を満たす解から得られる。
τE = −τ+ のとき、+像位置ベクトル <
θ+ は (θ+x (τE = τ+ ), θ+y (τE = τ+ )) = (a1 , b1 ) と
なり、これは図 3.19 で破線で表されている。θy 軸方向の最大変位は τE = 0 の時に実現さ
れる。τE = 0 のとき、θ<+ は (θ+x (τE = 0), θ+y (τE = 0)) = (0, b1 + b2 ) である (図 3.19)。
θ−
次に、レンズを受けていないときの光源の位置からのずれを現す−像位置ベクトル <
は次のようになる。
<θ− =
−u −
√
u2 + 4
û。
2
(3.51)
これは、角アインシュタイン半径で規格化してある。このベクトル <
θ+ の (θx , θy ) 空間で
の成分はそれぞれ、
<θ− = (θ−x , θ−y )
√
√
u + u2 + 4
u + u2 + 4
, −u0
= τE
.
2u
2u
(3.52)
(3.53)
80
第 3 章 JASMINE で拓くサイエンス
となり (図 3.18)、軌道は次のようになる。
2
2
θ−x
+ θ−y
−
図
θcrit±
θ−y
= 0,
θ−y + u0
(for 2θ−y + u0 < 0)
(3.54)
3.20:
の u0
依存性 とタイ
プ
A、B、C
の分類。
図 3.21: タイ
図 3.22: タイ
プ A、B、C の
プ A、B、C の
(θx , θy ) の時
軌道。
間依存性。
ここから、角半径 θlens をもつ球対称レンズ天体を考える。このレンズ天体は光学的に
深い物質で構成されているものとし、光源は点状のものを考える。θl を角アインシュタイ
ン半径で規格化したレンズ天体の半径とする。即ち、θl = θlens /θE である。光源からの光
子の軌道が有限の大きさを持つレンズ天体にぶつからない限りは、上で記述した点状のレ
ンズ天体の場合の計算はそのまま適用できる。レンズ天体にぶつかった光子は観測者に届
かない。レンズ天体の角半径が角アインシュタイン半径よりも小さいか小さくないかの2
通りの場合が考えられる:(i) θl < 1 及び (ii) θl ≥ 1。(i) の場合、次の2通りの軌道があ
る:(A) θl < θcrit− and (B-1) θcrit− < θl < 1。同様に、(ii) の場合には次の2通りの軌
道がある:(B-2) 1 ≥ θl < θcrit+ 及び (C) θcrit+ ≥ θl 。ここで、θcrit+ はレンズ天体と+
像の最接近時の角距離であり、θcrit− はレンズ天体と−像の最接近時の角距離である。両
者とも角アインシュタイン半径で規格化すると、次のようにインパクトパラメータ u0 を
3.5 Astrometric Microlens
用いて表わされる。
θcrit+ =
81
u20 + 4 + u0
, θcrit− =
2
u20 + 4 − u0
2
(3.55)
B-1 と B-2 は同じタイプの軌道を作るので、両方をあわせてタイプ B とする。図 3.20 に
θcrit± を u0 の関数としてプロットしている。まずタイプ A 軌道の場合、有限サイズの
レンズ天体が |τE | > τA の間、−像を隠し、+像のみが現われている。τE = ±τA のと
きに、レンズ天体と−像の距離がレンズ天体の半径に等しくなる。τA は、 式 (3.40) と
θl = |(u −
√
u2 + 4)/2| から計算され、
τA =
1
− θl
θl
2
− u20 .
(3.56)
となる。−τA < τE < τA の間は、+像と−像の両方が現われている。次にタイプ B 軌道
の場合、有限サイズのレンズ天体が常に−像を隠している。+像は常に現われている。最
後にタイプ C 軌道の場合、有限サイズのレンズ天体が−像を常に隠し、|τE | < τC の間だ
け+像を隠す。τE = ±τC のとき、レンズ天体と+像の距離がレンズ天体の半径に等しく
なる。タイプ A の場合と同様に、式 (3.40) と θl = (u +
τC =
1
θl −
θl
√
u2 + 4)/2 から、τC は
2
− u20 .
(3.57)
と計算される。|τE | > τC のとき、+像が現われている。
図 3.21 にタイプ A、B、C の θx と θy の時間変化を太線で示している。点線と破線は
それぞれ点状レンズ天体の場合の重心像と+像の時間変化を表わしている。図 3.22 にタ
イプ A(上図)、B(中図)、C(下図) の場合の軌道を太線で表わしている。点線と破線はそ
れぞれ点状レンズ天体の場合の重心像と+像の軌道を表わしている。タイプ A 軌道では
不連続点が軌道上にあり、この不連続点では像が一方の点から他方の点に一瞬で移動す
る。しかし、これは光源の大きさを無視したためで、有限の大きさの光源を考えるとこの
不連続性はならされる。タイプ C 軌道にも不連続点が存在し、この不連続点の間は+像
と−像の両方が隠されている。この間、光源は完全に隠されているので何も観測されな
い。タイプ A と同様に有限の大きさの光源を考えるとこの不連続性はならされる。
■物理量の縮退関係 球対称有限サイズのレンズ天体と点状の光源を考える場合、像位置
の軌道は次の4つの物理量で決定される:θE 、u0 、µ、θl 。θE と u0 は重心軌道 (楕円軌
道) の全体のスケール (例:a、b) から、または+像軌道の全体のスケール (例:a1 、b1 、
b2 ) から決定される [Dominik and Sahu, 2000] 。レンズ天体の角速度 µ は像の時間変化
から決められ、角アインシュタイン半径で規格化されたレンズ天体の半径 θl は、軌道の
不連続点から決定される。
82
第 3 章 JASMINE で拓くサイエンス
点状のレンズ天体を扱った数多くの論文で、軌道からの θE 、u0 、µ の決定法が述べら
れている。例えば、インパクトパラメータ u0 は b/a または b1 /a1 から決まる。a/b から
は u0 は次のように決まる。
2
.
(a/b)2 − 1
u0 =
(3.58)
同様に、a1 /b1 から u0 を決めることもできる。
ここでは、過去の研究で述べられていない軌道上の不連続点からのレンズ天体の角半径
θl の決定について述べる。レンズ天体からの+像と−像までの角アインシュタイン半径で
規格化した距離 θp と θm は次の関係を満たしている。
θp · θm = −1,
θp + θm = u,
(3.59)
同様に、レンズ天体からの+像と−像までの角アインシュタイン半径で規格化した距離
θ+ (= θp − u) と θ− (= θm − u) は次の関係を満たしている。
θ+ · θ− = −1,
θ+ + θ− = −u.
(3.60)
タイプ A 軌道の場合は、τE = τA のときレンズ天体の半径とレンズ天体と+像の距離が
等しい (i.e. θl = −θm )。式 (3.59) と式 (3.60) から
θl = θ+ .
(3.61)
を得る。−像が現われる直前は像の位置は θ+ である。同様にタイプ C 軌道の場合、
τE = τC のときレンズ天体の半径とレンズ天体と+像の距離が等しい (i.e. θl = −θp )。式
(3.59) と式 (3.60) から
θl = 1/θ+ .
(3.62)
を得る。+像が現われる直前は像の位置は θ+ である。θE が決められていれば、式 (3.61)
と式 (3.62) からレンズ天体の角半径が観測量になっていることがわかる。
タイプ A 軌道とタイプ C 軌道の場合は θl を観測的に唯一に定めることができるのであ
るが、タイプ B 軌道の場合には θl の上限 θl,upper と下限 θl,lower のみを軌道から決めるこ
とができる。これは、タイプ B の軌道 ( θl,lower < θl < θl,upper ) では軌道はレンズ天体
の半径に独立であるからである。図 3.20 からもこれは読み取ることができる。式 (3.55)
より、θl,lower = θcrit− と θl,upper = θcrit+ となる。
像の視差が測定されていない場合には、縮退のない観測量は角アインシュタイン半径
θE 、レンズ天体と光源のインパクトパラメータ u0 、レンズ天体の天球上の角速度 µ、レン
ズ天体の角半径 θl である。視差は衛星と地球からの観測またはレンズ天体が近い場合に
は地球の公転を利用することによって測定できる場合がある。もし、レンズ天体と光源間
の視差が測定された場合は、縮退のない観測量はレンズ天体の質量、(実際の) 横断速度、
レンズ天体と光源の実際のインパクトパラメータ、レンズ天体の実際の大きさとなる。
3.5 Astrometric Microlens
83
観測可能性
ここでは、レンズ天体の半径の情報を持つ位置マイクロレンズ効果を受けた像の軌道の
観測可能性について議論する。図 3.23 は、角アインシュタイン半径 θE (上図)、角アイン
シュタイン半径 θE で規格化したレンズ天体の角半径 (中図)、軌道のタイプ (A、B、C)
の境界を示すインパクト・パラメータ u0 を表した図である。横軸はレンズ天体までの距
離 (10−3 ∼ 10 kpc) で、光源までの距離は 100Mpc としている (光源までの距離を 50kpc
としても図はほとんど変わらない)。点線、破線、実線はそれぞれ太陽タイプ、木星タイ
プ、低温ガス雲タイプ (質量は 1 木星質量でサイズは 1AU) のレンズ天体の場合を示して
いる。レンズ天体の角半径を軌道から求めようとした場合、軌道の正確な形状がとらえら
れる必要がある。まず、タイプAの軌道の場合、 軌道上の不連続点が観測される必要があ
る。これは、−像がレンズ天体に隠されるときや現われるときに、レンズのサイズの効果
が観測される像の位置が+像の軌道上から+像と−像の重心の軌道上へ (またはその逆)
の移動として現われるからである。この移動は τE = ±τA の時に起こる。この不連続点間
の角距離 |θ+ − θc | は、次の式で現されるように角アインシュタイン半径で規格化したレ
ンズ天体の角半径 θl (= θlens /θE ) のみの関数である。
|θ+ − θc |τE =τA
θl3 (θl2 + 1)
=
.
θl4 + 1
(3.63)
ここで、θ+ = |θ<+ |、θc = |θ<c | である。図 3.24(上図) に、横軸をレンズ天体までの距離と
して 3 種のレンズ天体の |θ+ − θc |τE =τA をプロットしている。
タイプ B の軌道の形は+像の軌道を表す式 (3.49) で記述される。+像と−像の重心の
軌道は楕円形をしているのであるが、+像の軌道は楕円に似ているが楕円ではない。故
に、軌道がタイプ B であるかを判定するためには、タイプ B 軌道を観測的に楕円と区別
することが必要である。図 3.19 からわかるとおり、b1 の値は b2 とは異なる (b1 = b2 )。
であるので、タイプ B 軌道を判別するには、例えば b1 と b2 の差 (|b1 − b2 |) が観測的に
とらえられればよい。前のセクションで述べたように、タイプ B の軌道からはレンズ天
体の角半径の上限と下限のみを求めることができる。図 3.24(中図) に3種のレンズ天体
について |b1 − b2 | をインパクト・パラメータ u0 とレンズ天体までの距離 Dl の関数とし
てプロットした。
タイプ C の軌道の場合には、タイプ A の場合と同様に軌道上の不連続点をとらえるこ
とによりレンズ天体の角半径を求めることができる。不連続点は τE = ±τC の時に起こ
84
第 3 章 JASMINE で拓くサイエンス
る。不連続点間の距離 2|θ+x |τE =τC は次の式のように現される。
|2θ+x |τE =τC = 2(θl + 1)
u20
1
−
.
θl2
(θl2 − 1)2
(3.64)
これは、角アインシュタイン半径で規格化されたレンズ天体の角半径 θl とインパクト・パ
ラメータ u0 のみによって決まる。図 3.24(下図) に3種のレンズ天体の場合の 2|θ+x |τE =τC
をプロットした。
図 3.24 から、レンズ天体が非常に近い (1-100pc) 場合以外は、タイプ A に分類される
星、惑星、白色矮星、褐色矮星などは 10µ 秒角の位置決定精度では一般にサイズの効果を
とらえるのは難しいことがわかる。しかし、低温ガス雲状の天体であれば、10µ 秒角の位
置決定精度で十分とらえることが可能である。∗1
solar-type
Jupiter-type
cold gas
図 3.23: 3 種のレンズ天体の諸量
∗1
solar-type
Jupiter-type
cold gas
図 3.24: 3 種のレンズ天体の諸量
こ の 章 で は 、文 中 の 参 考 文 献 の 他 、[Alcock et al., 1998]、[Belokurov and Evans, 2002]、
[Honma, 2001]、[Lawrence, 2001]、[Paczyński, 1996]、[Urban et al., 1998] を参考にした。
3.5 Astrometric Microlens
3.5.5 銀河系外未同定天体
研究の背景
WMAP による宇宙背景放射ゆらぎの詳細観測により、我々の宇宙の入れ物としての大
まかな進化は把握されたと言ってよい。これからは我々の宇宙の姿自体の解明がサイエン
スとして目指す中心となることに大きな異論はないはずである。ダークエネルギー、ダー
クマター、そしてミッシングバリオンの問題などがクローズアップされ、宇宙論的構造形
成論はその重心を宇宙の構造から宇宙の構成要素の探求へとシフトすることになるのであ
る。本研究ではこのうち、ミッシングバリオンの探査を念頭に起き、その実証的なバリオ
ン形態モデルの提案と JASMIN による検証計画の素案をまとめる。
極限散乱現象
QSO の電波観測 (数 MHz 帯) により、その光度変化が百日程度で特徴あるパターンを
示すことが知られている (極限散乱現象; [Fiedler et al., 1987])。そのライトカーブの原
因となるプラズマ塊が数百メガパーセク程度にあると仮定するならば、プラズマ塊の固
有速度は有意に光速を越えることとなる。このため、QSO 自身の変動現象か、もしくは
我々の銀河系内のプラズマ塊に起因する変動現象がその解である。
さらに、QSO 0954+658 の 2.7MHz の観測結果をみてみると、ライトカーブの対称性
が非常に良く、そのライトカーブはスパイク構造を持つことも判る。合わせて、光度が極
小になったときでさえ有限の輝度を保っている。これらのことを QSO 自身の変動現象と
して捉えることはシンプルではない (否定はされていない)。
現在では、この極限散乱現象は我々の銀河系内のプラズマ塊が QSO の前面を横断する
際に生じるものと考えられている (プラズマレンズモデル:図 3.25)。完全電離プラズマ中
を光が真空より伝搬してくると、そこで位相が早くなることが良く知られている (発散レ
ンズとなる)。この性質を踏まえると、ダプルピークのスパイク構造が非常にシンプルに
説明できるのである。ちなみにライトカーブの極小値において有限の輝度は QSO とその
ジェットからなる光源の大きさの有限性に起因する。
低温度高密度雲モデル
我々の銀河に付随したプラズマレンズが存在するとするならば、QSO の極限散乱現象
は十分に説明することができる。では、どの様なプラズマレンズモデルが許されるのだろ
85
86
第 3 章 JASMINE で拓くサイエンス
図 3.25: プラズマレンズモデルの概念図。十分遠方に光源である QSO があるとし
ている。電子プラズマ塊が発散レンズの役割りを果たすことで、特徴的なスパイ
ク構造を持つライトカーブが説明される。図は [Clegg et al., 1998] Astrophysical
Journal 496, p253-266 (1998) より p256 図 2 を引用。
うか?
■期待される性質 プラズマの空間分布としてはガウシアンを仮定することにする。まず
レンズのサイズは、それが我々観測者から1 Kpc 程度にあるとする (銀河ハロー成分であ
るが、やや我々に近いことを想定す) と、現象の時間スケールから数天文単位となる。ラ
イトカーブの明るさからプラズマレンズの密度が定まることとなり、それは単位体積当り
の電子数で数百個となる。
ここで大きな問題が生じる。QSO の極限散乱現象に必要なプラズマレンズの密度が大
き過ぎるのである。つまり、温度を1万度程度と低めに設定したとしても、プラズマレン
ズ自体の持つ圧力が大き過ぎるため、星間空間では圧力平衡を保てずプラズマ塊は拡散し
てしまうのである。
解答として期待される天体は、よって、自己重力で自身の自己同一性を保てるものと期
待される。まずサイズからの制限が強く、プラズマレンズの親天体は低温である必要があ
る (約 10K)。こういった低温では星間ガスは中性であるが、この低温でコンパクトな天
3.5 Astrometric Microlens
—
87
0.1MJ
1.0MJ
10.0MJ
1.0
10.0
100
4.0 × 1012
4.0 × 1010
4.0 × 108
Population mass (M pc−3 )
0.3
0.01
0.001
Distance (pc)
45
300
1000
HD (mJy)
5.3 10−3
1.2 10−3
1.21 10−3
LiH (mJy)
2.1
4.8
43.3
CO (mJy)
3.6 10−2
8.2 10−2
73.0 10−2
dust cont. at 0.11 mm (mJy)
3.9 10−6
8.8 10−6
7.9 10−5
dust cont. at 0.67 mm (mJy)
0.075
0.17
1.52
dust cont. at 2.60 mm (mJy)
2.2 10−2
4.9 10−2
0.44
Radius (AU)
Density (cm−3 )
表 3.3: [Lawrence, 2001] による制限と [Kamaya and Silk, 2002] の結果
体の表面から、紫外線による加熱や電離により、QSO の極限散乱現象に必要な電離プラ
ズマが供給されるものと考えれば良い。
■USOモデル
こういった低温でコンパクトな星間雲の正体はどの様に考えられるのだ
ろうか?このためには、モデルを仮定したとしても、この星間雲からの直接光を検出する
ことで制限が付けられる。[Lawrence, 2001] は SCUBA のサブミリ波点源の内で、輻射
源の素性がはっきりしないもの (Unidentified SCUBA Object: USO) のうちに、この星
間雲のポピュレーションが存在するものと予言している。低温でコンパクトな星間雲を今
後 USO と呼ぶが、この USO はダストに汚染されていることを仮定することにもなって
いる。
[Lawrence, 2001] はこのサブミリ波観測からの制限に加えて、つぎの要請を課し、期待
される USO の性質をまとめている (表 3.3)。(1) USO は奇妙な SED(スペクトルエネル
ギー分布) を持っていない。(2) 銀河系内での空間分布は当方的である。(3) 銀河の恒星
や星間物質への力学的影響は非常に小さい。(4) FIR-mm 背景放射を越える積分輝度は
持たない。(5) 天空を覆う確率は非常に小さいものとする。USO は QSO の極限散乱現
象からの制限ももちろん満たす。
その後、筆者とシルク博士により、この USO の性質は LiH の ALMA による直接観測
で明らかできることが指摘されている。USO の一番大きな問題点はその形成をどのように
可能にするかであるが、同様に筆者とシルク博士は星形成領域からの星になりつつある低
温でコンパクトなクランプが潮汐力や磁気張力のキックによりハローに飛ばされたきたも
のと指摘した。これは、銀河円盤での星形成活動と QSO の極限散乱現象を関連づける大
88
第 3 章 JASMINE で拓くサイエンス
胆な発想であるが、理論的には検証すべき課題のはずである ([Kamaya and Silk, 2002])
■位置マイクロレンズによる検証 [Kamaya and Silk, 2002] ではスペクトル輝線観測か
ら USO の物性への直接的制限をつけることが目標であった。ALMA による観測により
USO の低温さが把握できるのである。一方、USO のコンパクトさに対する実証的制限は
別途与えられるべきである。最近、高橋 (2003; 投稿中) は位置マイクロレンズ現象の詳細
な研究を発表した。彼によると、重力レンズを被った光源はダブルイメージとして観測さ
れ、レンズ天体の運動にともない光源の天空上での位置が特徴的な軌道を持つ。
レンズ天体が光学的に厚く、適度な大きなを持っていたとしたならばどうだろうか?片
方のレンズイメージが観測されつつあったとしても、もう片方のイメージがレンズ天体に
より掩蔽されることになる。この掩蔽を観測することにより、レンズ天体 (今回の場合は
USO) のサイズに強い制限がつくのである。この観測可能性は高橋 ([Takahashi, 2003])
にまとめられており、JASMIN などの活用が期待される。
■JASMINE への期待 USO が星形成活動にその起因を持つとしたうえで、そのサイズ
を位置マイクロレンズ効果を用いて調査するためには、銀河円盤全体にわたる恒星の位置
を詳細に把握する必要がある。もちろん、位置マイクロレンズ効果を被る光源は恒星であ
る。幸い JASMIN は赤外線に感度帯を持つため、銀河円盤のほぼ全体にわたる恒星分布
が判る。よって、[Lawrence, 2001] や [Kamaya and Silk, 2002] が期待する USO の位置
マイクロレンズ利用によるサイズの検証は、「JASMIN によってのみ可能なサイエンス」
である。我々の宇宙の姿自体の解明がサイエンスの中心となった今、ミッシングバリオン
探査は重様課題であるべきで、その1つの方策が JASMIN による USO 探査なのである。
まとめ
星間物質の諸相のパーフェクトな理解へ近づためには、観測限界から逃れている星間ガ
スの存在可能性を1つづつ丹念に当たっていく必要がある。これはバリオン物質の存在
形態の把握につながる。逆に、我々人類が見過ごしてきた宇宙の諸相の可能性を減じるこ
とにつながる。USO はないのかもしれないが、その存在を考察することで ISM の全体
像の再構築が行われる。これは、銀河の構造や進化を洗い直すために必須な作業であり、
JASMIN はこういった基本的サイエンスアプローチに大いにそして本質的に影響を与え
る結果を残せるプロジェクトである。
3.6 系外惑星探査
3.6 系外惑星探査
太陽系外の惑星を探すことが盛んになってきている。1つには、太陽系以外の惑星の物
理的特徴を探ることによって、惑星系形成の研究を発展させることにある。今までは太陽
系内の惑星しか知られていなかったが、他の恒星にある惑星系を探ることができれば、惑
星系形成に関しては非常に多くのサンプルが集まることになり、より普遍的な法則が見つ
かる可能性がある。もう1つは、やはり、太陽系外での生命体の発見であろう。太陽系内
の惑星ではまだ生命体は発見されていないが、太陽系外の惑星ではどうなのか。これは、
生命の起源や人類の存在意義にも関わる興味深い問題である。
以上の観点などから広く系外惑星探査が行われている。そして、将来の衛星計画として
は、NASA と ESA などが協力して行う TPF(Terrestial Planet Finder) 計画がある。こ
の計画では惑星のイメージを直接観測し、分光観測によって、そこに存在する元素をはか
り、生命体があるのかどうかも探る。2015 年当たりの打ち上げを目指している。日本で
も同様な計画 (JTPF) が検討され始めている。だが、この計画の前に、あらかじめどこに
惑星があるのか、そのターゲットを探っておく必要がある。また、惑星系を探査し、多く
の惑星系のサンプルを集めておくことは、前述したように惑星系形成の解明にとっても
重要である。そこで、系外惑星探査が盛んに行われるようになってきた。その方法として
は、transit、重力レンズ、視線速度測定などがあるが、それらに加えてアストロメトリに
よる方法もある [Perryman, 2000]。実際、NASA の SIM 計画も、SIM により惑星を探
し、それを TPF で詳細に観測するという流れにも成っている。
では、アストロメトリによってどうやって惑星を探すことができるのだろうか? それ
は、恒星運動のふらつきを見つける方法である。分解能が悪い場合、惑星がある場合で
も、恒星と惑星は分離できない。その場合、アストロメトリで観測されるのは、恒星と惑
星の光学中心である。惑星がない場合は、恒星の天球上での運動は、一般的には固有運動
による直線運動と年周運動による楕円運動の組み合わせになるが、惑星がある場合は、惑
星運動の効果により通常の組み合わせ運動からのずれが起こる。そのずれを測定するので
ある。このずれは、もちろん、恒星の視線速度からも測定できる(ドップラー法)。これ
が視線速度での惑星探査の方法である。そして、アストロメトリによる方法とは、このず
れの運動を天球上の星の運動から測定するものである。
この分光による視線速度の方法とアストロメトリの方法は、同じ運動のずれを測定する
ものであるが、2つの方法には以下のような違いがある。
(i) 視線速度による方法:
精度は星までの距離によらない。
惑星軌道の inclination に依存。したがって、求まるのは、惑星質量の下限値。
89
90
第 3 章 JASMINE で拓くサイエンス
星の振動、回転によるドップラーシフト効果が混じる可能性がある。
(ii) アストロメトリによる方法
惑星軌道の inclination に依存しない。
星の振動、回転の影響はない。
星までの距離が遠いほど、精度が悪くなる。
以上のように、方法によって長所、短所があるが、この2つの方法を組み合わせること
によって有効な物理情報を取り出すことができる [Mazeh et al., 1999]。ただ、両者の方
法とも、惑星の公転周期の約半分以上の観測時間は必要であることは注意すべきである。
さて、アストロメトリによる方法では、今までヒッパルコスのデーや HST のデータ
を用いて惑星の質量の評価などに関しての結果が出されている [Perryman et al., 1996,
Mazeh et al., 1999, Benedict et al., 2002]。しかし、より軽い惑星、または我々から遠い
距離にある惑星を探すためにはより高精度なアストロメトリ観測が必要である。運動のず
れの大きさ α は、以下のように表される。
α=
Mp a
.
M∗ d
ここで、Mp , M∗ はそれぞれ惑星と恒星の質量を表す。また、a は Mp と M∗ の間の距
離、d は太陽系から恒星までの距離を表す。すると、例えば、m∗ = 1M , Mp = MJ =
0.001M , a =5AU, d=100pc とすると、α = 50µas となる。従って、このような場合は、
やはり 10µas オーダーの高精度アストロメトリ観測が必要である。このように 100pc の
範囲内で木星質量程度の惑星を探す場合は、GAIA、SIM、JASMINE といった高精度ス
ペースアストロメトリ観測が必要であり、JASMINE でもこのような惑星系は多く検出
できる可能性がある。ただ、地球型惑星は、GAIA や JASMINE でもかなり困難であり、
サブマイクロ秒角オーダーの超高精度観測が必要となってくる。しかし、この場合でも、
主星表面の非一様性(黒点による)の方が、光度中心の移動よりも大きい場合があり、光
度中心のずれを測定するのは困難という問題点は残る。
3.7 赤外線天体の基準座標系
1.2 でも述べたように、アストロメトリの目的の1つに(むしろ、歴史的にはこれが最
大の目的)基準座標系の構築がある。GAIA もそうであるが、JASMINE の場合も、QSO
の暗さでも高精度で位置測定が可能となる。そうなれば、自らの観測データのみで、絶対
的な基準座標系を高精度で構築することが可能であろう。JASMINE は近赤外線での測定
なので、今後の近赤外線での天体観測に対して、高精度の基準座標系を提供できることに
もなる。また、ICRS の定義をもっと高精度で決めることも可能となる。
91
第4章
JASMINE システムの検討概要
この章の目次
4.1
4.2
4.3
位置天文観測の概要
. . . . .
JASMINE の仕様概要 . . .
4.2.1 達成精度の目標 . . . .
4.2.2 望遠鏡の仕様 . . . . . .
4.2.3 検出器の開発 . . . . . .
4.2.4 サーベイ方法 . . . . . .
4.2.5 衛星の軌道 . . . . . . .
サイエンスからの要求 . . . .
4.3.1 銀河系モデルによる評価
4.3.2 Confusion limit . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . .
. . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
91
92
92
93
94
94
95
95
95
97
4.1 位置天文観測の概要
アストロメトリ観測の方法はどのようなものであり、また位置決定精度はどのように決
まるのであろうか。アストロメトリの観測は、星像の中心を如何に精度良く求めるかにか
√
かっている。位置決定精度は、理想的にはおおよそ、σ ∼ λ/D N で与えられる。ここ
で、σ は位置決定精度(分散値)、λ は波長、D は望遠鏡の口径、N は星当たりの得られ
る photon 数である。つまり、イメージを分解するのではなく、イメージの中心だけを求
めればいいので、得られる photon がポアッソン分布をしていれば、photon 数を蓄えれば
蓄えるほど、中心は
√
N に逆比例して、精度良く求まることとなる。従って、photon 数
を如何にかせぎ、他のノイズを抑えるかが、位置決定精度を上げる鍵となる。そのために
は、大口径の望遠鏡により、集光力をあげる(これによって、分解能も上がってくれる)、
感度良い検出器による観測、積分時間を増やすことなどが必要となる。さて、さらに大量
の星をできるだけ短期間に観測を行うサーベイ型の場合には、広大な観測視野を必要とす
92
第 4 章 JASMINE システムの検討概要
る。つまり、検出器をなるべく多く並べて、搭載する必要がある。実際、ESA のスペース
アストロメトリ計画である GAIA 計画も、多くの CCD を並べる方式を採用している。
ところで、GAIA(DIVA や FAME も) では、CCD を使用して観測するが、衛星の scan
に合わせて、CCD の TDI モード (drift scan モード)を用いる。短時間で読み出すと、
その間に蓄えられる photon 数が少なくなり、そのぶん、読み出しノイズの影響を受けて
精度が落ちてしまう。したがって、積分時間をふやし、なるべく photon 数を蓄えたいの
だが、衛星が scan することによって、像がゆがんでしまってはいけない。そのために、
TDI モードを使用し、電荷を scan rate に同期化させて輸送し、星像がゆがまないように
工夫するわけである。
このようにして、先ず星が 1 検出器を通過した後、スキャン方向へプロジェクトした星
像の(pixel 毎の光子数の)データをとる。衛星が、1周以上することにより、大円上の
星像データが1周分以上得られるが、その情報を用いてスキャン方向の星像中心位置と衛
星の姿勢位置をデータ解析により得ることができる。その際は、99.5 度離れた視野を同時
に観測しているということが重要になる(7.3 章を参照)。こうして異なった時刻にいくつ
か得られた星像中心の情報をもとに、その星の天球上の位置、年周視差、固有運動を統計
解析により求めていく(7.5 章)。
4.2 JASMINE の仕様概要
4.2.1 達成精度の目標
JASMINE では近赤外線を用いて観測を行うが、どの波長域を用いるかは、検出器の開
発や衛星全体の仕様、コスト、そしてサイエンス目標の達成度などを総合的に判断し、決
定する予定である。候補としては、z-band(0.9µm) と K-band(2.2µm) を考えている。
先ず、z-band を採択した場合は、z=15.5mag で σ = 10µas を目標達成精度としてい
る (4.3 節参照)。この場合、z=14mag の星は、σ = 5.4µas(理想的な場合)、z=16mag
で σ = 13µas(銀河中心の星の距離精度が、11%)、z=17mag で σ = 22µas となる。銀
河面方向でのサーベイ面積は、360◦ × 7◦ を考えている。
K-band を採用した場合のアストロメトリの目標達成精度は、K=12mag で σ = 10µas
である (4.3 節参照)。この場合、K=10mag より明るい星は、σ = 4µas、K=13mag で
σ = 16µas(銀河中心の星の距離精度が、13%)、K=14mag で σ = 26µas(銀河中心の星
の距離精度が、20%) となる。
4.2 JASMINE の仕様概要
4.2.2 望遠鏡の仕様
JASMINE の目標精度を達成するためには、一回の検出当たりの星像中心を検出器の
1画素の約百分の 1 という高精度で決定する必要がある(7.2 参照)。そのためには、星
像分布 (Point Spread Function) が、ある個数以上の画素を覆っている必要がる。一方、
1つの星像があまり多くの画素を覆ってしまうと、全体の視野面積が小さくなり、目標の
サーベイエリアを限られたミッション時間内に観測することができない。そこで、妥当な
値として、数値シミュレーションの解析結果に基づき、z-band の場合は、λ/D · f /w=2、
K-band の場合は、λ/D · f /w=4(ここで、f は焦点距離、w は、1 画素のサイズ)を採
用する。このため、焦点距離は長くなるが、それを衛星のフェアリングのスペースに収ま
るようにコンパクトにしなくてはいけない。また、当然、星像中心を高精度で求める必要
があり、収差の影響が小さく、中心対称性が良い PSF を得られるような光学系の設計が
必要である。
例えば、z-band を採用した場合の望遠鏡の要求仕様は口径 2 m、焦点距離 66.7 m、ア
ストロメトリ用有効視野面積 0.23✷◦ 、望遠鏡寸法 3m × 3m × 2m である。これを満た
す光学系として(1)Ritchey-Chretien(RC)、Korsh(3 枚鏡)を検討している(高遠
氏(国立天文台)の協力のもと、矢野氏が設計。5.2 節を参照)。RC 系では球面収差とコ
マ収差しか補正できない。像面湾曲 や非点収差を補正するためにレンズ系を使用すると、
色収差の問題が出てくる。そこで、3 枚の鏡を使うと反射系だけで非点収差・像面湾曲も
補正可能となる。3 枚鏡系の中でも、1977 年に Korsh が発表した2軸系は、長焦点距離
のシステムでも視野のケラレが比較的少なく、JASMINE の要求仕様を実現するのに適し
ていると思われる。2 軸 Korsh 系は SNAP(Caltech の超新星サーベイ衛星:口径 2 m、
焦点距離 22 m)でも検討されている。Korsh3 枚鏡の場合も、ほぼ所定の寸法に収めるこ
とができ、視野も要求仕様より広く取ることが出来る。この系は反射のみで出来ているの
で、基本的に色消しである。このように光学系として有力な設計案は出来てきているが、
今後もより良い光学系設計および許容誤差の検討等を続けていく予定である。
ところで、焦点面に関しては、z-band の場合、目標精度を達成するため、アスト
ロメトリ用に焦点面に 162 個 (9(スキャン方向) × 18(スキャン方向と垂直な方向)) の
CCD(4K×2K) を並べる。また、sky-mapper 用の検出器およびアストロメトリ用以外に
測光用に可視光のいくつかのバンド、および可能ならば J, H バンド用の検出器を並べる
予定である。
K-band の場合は、焦点面に検出器をアストロメトリ用に 6(スキャン方向) × 7=42 個
(画素数が、4K × 4K の場合)、さらに、sky mapper 用、J, H-band の photometory 用
に検出器を並べる。
93
94
第 4 章 JASMINE システムの検討概要
なお、目標精度を達成するために必要な JASMINE の仕様概要については、その計算
方法が付録 A に示されているので参照されたい。
4.2.3 検出器の開発
近赤外線での観測は JASMINE 衛星以外の位置天文観測計画にはない特徴で、これに
より独自の科学成果が期待される。実際に近赤外線のどこの波長を狙うのかは、得られる
科学成果の優先順位を考慮しながら、検出器の実現可能性、衛星システムからの制限、コ
スト等、さまざまな技術課題を考慮しながら検討しなければならない。なかでも検出器
は重要な要素である。現段階で我々が検討している検出器は次の K-band と z-band 用の
2 種類である。各々は次の様なものである。(i) HgCdTe などの赤外線有感物質を、シリ
コンの読み出し回路にはりつけるハイブリッド式で、2µm を超える波長まで感度を有す
る新しいアレイ検出器であり、TDI モードが動作可能となるもの、(ii) 通常の CCD のよ
うにモノリシックなシリコン基板で作られるが、特殊なシリコン基板を使用することによ
り、可視光から波長 1µm の近赤外線まで感度を有する新タイプの CCD である(宮崎氏
(国立天文台)の協力により開発中)。前者は長い波長まで感度があるものの、後者に比べ
構造がやや複雑という特徴がある。すでに述べたように検出器は JASMINE 計画の性格
を大きく決定づけるので、我々はスケジュールの許す限り、この両者の試作、評価を精力
的に行う予定でいる(5.5 節を参照)。
4.2.4 サーベイ方法
JASMINE は衛星のスピン回転により、連続的なスキャン観測を行う(6.3 を参照)。衛
星のスピン軸は銀極方向から 3.5 度傾け、衛星はその軸の周りをスピン回転する。そし
て、そのスピン軸自体が、銀極の周りを歳差運動する。z-band での観測を採択した仕様
では、衛星のスピンレートは、97.0 秒角/秒(回転周期:約 3.7 時間)、歳差運動の周期は、
約 28.6 日である(付録 A)。以上のような衛星運動で、銀河面方向に対して、360◦ × 7◦
の面積エリアを約 28.6 日でサーベイ可能となる。このサーベイでは、1 つの target を 1
年当たりに観測する回数は約 100 回である。さて、春と秋はこのような運動でよいが、夏
と冬期は、太陽が銀河面方向に入ってくる。そこで、太陽をさけるため、衛星のスピン軸
を約 90 度傾け、衛星は、銀河面にほぼ垂直な方向をサーベイさせる。この時期の観測に
よって、ハロー星や系外銀河の観測も行うことができる。 また、グローバルアストロメトリを構築し、アストロメトリの情報を精度良くするため
には、大角度離れた filed を同時に観測する方法が得策である (5.6 を参照)。つまり、狭い
視野内では基準星とターゲット星の相対的な年周視差しか得られないが、大角度離れた星
4.3 サイエンスからの要求
を同時に見ることにより、絶対的な年周視差を得ることができる [宮本昌典, 1997]。さら
に、衛星の回転則が予想外にずれている場合、大角度離れた星の位置情報が分かっている
と、観測データを用いて、自己完結的にそのずれを導出することができる(5.6 節参照)。
このようにグローバルアストロメトリの構築のためには、大角度離れたところを同時に
観測することが必不可欠だが、この方法はヒッパルコスが初めて採用し、成功を収めた。
これに続く、GAIA といったサーベイ型のアストロメトリ衛星も同様の手法を取る。従っ
て、JASMINE も互いに交差する2枚の平面鏡を主鏡の前に用意し、99.5 度離れた視野
を同時に観測し、同一焦点面に結像させる (5.2, 5.6 節を参照)。どちらの方向から来た像
かは後からのデータ解析で判別可能である。
4.2.5 衛星の軌道
衛星の軌道としては、Sun-Earth の L2-point を検討中である。理由としては、太陽、
地球がほぼ同じ方向にあり、観測できる領域を拡げられることと、熱シールドを一方向だ
けに設置すればよいこと、(ii) 熱的環境の変化が安定していること、(iii) 衛星の軌道制御
が比較的容易であること、(iv) 放射冷却により冷却できること、等があげられる。ただ、
リサージュ軌道とハロー軌道のどちらを選ぶかは、食の影響、通信量と通信方法、通信ア
ンテナによる衛星の振動への影響などを考慮しながら選択を考えていく予定である。
4.3 サイエンスからの要求
JASMINE の観測対象の星に対して、どの等級の星にどれぐらいの位置精度を要求する
かは、仕様から受ける制限とともに、観測可能な星の数を十分考慮に入れて決定していか
なくてはならない。十分な個数とは、(1)GAIA で(同じ位置精度で)観測可能な個数と
比較して、(2) サイエンスを展開する上で、という 2 つの意味あいを持つ。そこで、
(同じ
位置精度をもつ)どのタイプの星がどのくらい観測可能であるかを、銀河系モデルから評
価した。また、星の個数密度が高い銀河面では、アストロメトリの対象となる比較的明る
い星のごく近傍に、暗い星が混入することで、アストロメトリの精度に制限がついてしま
うことが考えられる。これを confusion limit と呼ぶが、それについてもさきの銀河系モ
デルを使って評価してみた。
4.3.1 銀河系モデルによる評価
ここでは、JASMINE で検討されている K バンド及び z バンドで期待される星の個数
を計算した (銀河系モデルについては AppendixB を参照)。それぞれのバンドで 10 万分
95
96
第 4 章 JASMINE システムの検討概要
図 4.1: 期待される星の個数を距離の関数で示したもの。右:銀河中心方向、左:
anticenter 方向。銀経方向の視野の幅は、1◦
の 1 秒角の位置精度がでる等級を K=12 等、z= 15.5 等であるとして評価し、それらを、
GAIA での V バンド(GAIA が 10 万分の 1 秒角を出す等級 V=15 等)で期待される個
数との比較を行った。図 4.1 は、それらの 3 つのバンドにおける星の個数を距離の関数と
して銀河中心方向及び anticenter 方向について示したものである。銀経方向の視野の幅
は 1◦ であり、銀緯方向は、|b| ≤ 3.5◦ である。図より明らかに我々からの距離が遠くなれ
ばなるほど、近赤外での個数が可視光に比べて卓越することがわかる。例えば、バルジの
力学構造を精度良く構築するためには、大まかに言って少なくとも 100 万個程度の星の数
が必要と思われるが、近赤外線 (z-band、K-band とも)はその条件をクリアしそうであ
る(バルジの銀経方向の幅は、約 10 度であることを注意)。しかし、V-band では、バル
ジの星は 10 万分の 1 秒角の高精度では見えない。この点から言っても、近赤外線で測定
を行う意義がはっきりと理解していただけると思う。また、z∼15 等、k∼ 12 等で、10 万
分の 1 秒角の精度を出すように設定しておけば、GAIA と比較して個数が多いという点
のみならず、バルジや遠方のディスク面の力学構造の解析(に必要な星の数と精度)の点
からいっても十分であることが分かる。
さらに、図 4.2、4.3 は星のタイプ別に示したものである。銀河系ポテンシャルの tracer
であり、かつ明るい星である、gM や gK といったタイプの星は、銀河系の力学構造を解
析する上で重要であるが、近赤外線では、遠方でも可視光に比べて圧倒的に多く観測で
きる。また、dwarf star は、もともと暗いため、太陽系近傍しか精度良く観測できない
が、この領域でも近赤外線による観測の方が観測個数が多く、近赤外線での観測が有利で
ある。
4.3 サイエンスからの要求
図 4.2: 銀河中心方向で期待される星の個数をスペクトルタイプ別に距離の関数で示したもの。
4.3.2 Confusion limit
近赤外線では、可視光に比べて、星が多く見えるのは、サイエンスを展開する上で
は非常にメリットであるが、位置測定において、あまり星の密度が多すぎると、暗い星
が background noise の原因となり、位置精度に悪影響を及ぼすことになる。そこで、
confusion により、位置精度に影響が出てくる等級、つまり confusion limit で決まる限界
等級を評価した (手法については AppendixC を参照)。もし、confusion limit で決まる限
界等級が 10 万分の 1 秒角の精度達成を設定した等級より下回る場合は、その方向につい
ては confusion limit で位置測定の精度が決定し、要求通りの位置精度が出ないことを意
味する。銀河系中心方向の confusion limit の結果を図 4.4、4.5 に示す。k バンドの場合、
中心に近いところでも、confusion limit による限界等級は 12 等級を上回り、13 等級程度
である。従って、K バンドでは、銀河中心付近でも、12 等で 10 万分の 1 秒角程度の精度
97
98
第 4 章 JASMINE システムの検討概要
図 4.3: anticenter 方向で期待される星の個数をスペクトルタイプ別に距離の関数で示したもの。
で測定可能と予測される。ただ、限界等級は、銀河中心付近以外で(位置測定が可能な条
件から)設定している 16 等級に比べれば、中心付近のごくわずかな部分が confusion の
影響を受けると予想される。
また、z バンドの confusion limit による限界等級は 19 等級であり、10 万分の1秒角程
度の精度で測定可能な 15.5 等級を上回り、さらに位置測定が可能な等級である 18 等級を
も上回っており、confusion は問題にならないと予想される。
以上より、K-band、z-band ともに 10 万分の 1 秒角の精度を要求した、各々の等級に
対しては、どの観測方向でも confusion を受けることなく、その精度を達成可能と思わ
れる。
4.3 サイエンスからの要求
図 4.4: K-band における銀河中心方向での confusion limit による限界等級。
図 4.5: z-band における銀河中心方向での confusion limit による限界等級。
99
101
第5章
望遠鏡・検出器の仕様と課題
この章の目次
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.1
5.2
5.3
光学系デザイン . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
超軽量鏡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.3.1
5.3.2
5.3.3
5.4
5.5
5.6
JWST(NGST の新呼称)の開発 . . . . . . .
新材料の開発 . . . . . . . . . . . . . . . . . .
新研磨技術の進展 . . . . . . . . . . . . . . .
焦点面 . . . . . . . . . . . . . . . . . . . . . . .
検出器 . . . . . . . . . . . . . . . . . . . . . . .
5.5.1 赤外線アレイ検出器 . . . . . . . . . . . . . .
5.5.2 新タイプの CCD 開発 . . . . . . . . . . . . .
ビーム混合鏡と basic angle . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
112
113
114
117
117
119
120
122
5.1 概要
JASMINE の観測装置としては、赤外線望遠鏡と検出器からなるシステムである。打ち
上げロケットのフェアリングのサイズや、L2 ポイントまでの打ち上げ可能重量に見合っ
た望遠鏡・検出器のシステムを開発、制作することが必要である。以下では、望遠鏡制作
の土台となる光学系の設計について先ず述べる。星像中心を精度良く決めるためには、非
常に収差が少ない良い星像を安定に得ることが必要があり、そのような光学系のシステム
が望まれる。また、鏡は変形がすくなく、鏡面精度も良いものでなくてはいけない。さら
に、打ち上げの加重や振動に耐えるとともに、打ち上げ重量の制限からなるべく軽量にし
なくてはいけない。このようなスペース用の超軽量鏡の開発が必要となる。また、焦点
面では視野を大きくし、多くの検出器をならべる必要がある。検出器の感度がよく、また
TDI モードが可能なことが必要条件である。また、望遠鏡では、主鏡の前にお互いに交差
102
第 5 章 望遠鏡・検出器の仕様と課題
し、大角度離れた2方向の視野からの光を主鏡に集めるためのビーム混合鏡を設置する。
その交差角度を安定に保つ必要があるが、変動は必ず起こるので、それをモニターする必
要もある。また、星像中心を精度良く求めるために望遠鏡と検出器はその安定性が厳しく
求められる。
以上のような開発要素があるが、以下で詳細を説明していく。
5.2 光学系デザイン
JASMINE は銀河系ディスク及びバルジを 99.5 度という大角度離れた 2 つの望遠鏡で
同時に観測しながら、その 2 台の望遠鏡を含む平面と天球が交わる大円上を回転しながら
サーベイする。この時 2 台の光学系を用意する事も考えられるが、我々は 1 台の望遠鏡
に、2 つのフィールドからくる光をビーム混合鏡によって、同一光軸に導入する手法をと
る。この理由は光学系が簡素化できること、同一焦点面を共有する事により検出器の個数
を半減できることがあげられる。この場合、異なるフィールドの星が同時に検出器にかか
る事となるが、これは後の解析で分離する。
光学系に関しては、JASMINE は検出器上での Point Spread Function(PSF) が λ/D
で 2 ピクセルにわたるよう設計する必要があるため、非常に長焦点となる。これを小さい
スペースに収めなければならないことから非常に厳しい光学系となる。
2 枚鏡では Ritchey-Chretien 系が非常に良く調べられている。Ritchey-Chretien 系は
主鏡、副鏡ともに双曲面をもつ 2 枚鏡の系である。この光学系はシンプルでありながら、
球面収差、コマ収差が取り除かれる事から「すばる」をはじめとして多くの光学系に採用
されており、JASMINE の光学系としても有力な候補のひとつである。しかし、像面湾
曲が強く出る事が知られている。特に JASMINE のような長焦点では非常に強い像面湾
曲が見られる。一方 JASMINE 計画では非常に広視野を必要としているためこの像面湾
曲を補正するのは相当困難である。またこの補正光学系のために発生する色収差を取り除
く事も、幅広い波長を用いる JASMINE にとって困難をともなう。以上の観点から、3 枚
鏡(Korsh)光学系を考える。 光学系は Ritchey-Chretien 系に比べて多少複雑になるが
3 枚光学系は 2 枚鏡に比べて自由度が増えるので球面収差、コマ収差に加えて像面湾曲も
同時に補正できる可能性がある。さらに、補正レンズ系を用いずに補正が出来れば、色収
差からも完全に解放される。
検討結果の詳細は後に示すがまず総括すると、JASMINE に必要な視直径 0.75 度の広
視野全体にわたって回折限界を充分に下回る wave front error となり、良像が得られた。
像の歪みであるディストーションに関しても最大値で 0.02 %と充分に小さい視野が得ら
れた。鏡のみでの設計なので、もちろん完全に色消しである。2 軸 Korsh 系の場合、焦点
近くに光束をさえぎる平面鏡が存在する事により視野の欠落が心配であるが、その欠落が
5.2 光学系デザイン
103
図 5.1: JASMIE 光学系の全体模式図
起こらないように工夫した。焦点面はより良い視野を実現し、かつ光学系がコンパクトに
なるようにするため、若干の曲率を許して設計をしたが、曲率半径は 19m と大きく問題
はないと思われる。最終的には、H-IIA の Dual launch を想定したサイズに収まる範囲
で JASMINE の要求を満たす光学系の設計が可能である。
まず始めに、検討した光学系の全体図と個々の名称を示したものを図 5.1 で示す。他の
一般的な光学系と大きく異なる点は主鏡前方の第 1 副鏡あたりに二枚の交差する平面鏡が
あるが、これがビーム混合鏡とよばれるもので 2 つのフィールドを同一焦点面に取り込む
ものである。まず始めにここの小節では、ビーム混合鏡を除く光学部分の精度評価をおこ
なう。
ビーム混合鏡をのぞく JASMINE 光学系部分の Layout(z-band 仕様)および、その
Surface Data をそれぞれ図 5.2、表 5.1 に示す。
表 5.1 をみて解るように、この光学系は主に 2m の主鏡と 43.1cm、60.0cm の 2 枚の副
鏡より成る。主鏡と第 1 副鏡により一度結像し、結像したところで平面鏡にて異なる軸
へ光束をうつす。その像を第2副鏡(凹面鏡)にて拡大しつつ再度検出器上で結像させて
いる。第2副鏡以降の光束はコンパクトにおさえるため、平面鏡にて 3 度折りたたんで
いる。焦点面では若干の像面湾曲を許し、検出器を並べる時にある程度は吸収できるとす
る。像面の曲率半径は 18.6 mである。第 1 の副鏡に関して Conic constant −5.17 と少
し強い双曲面となっているが問題はないだろう。
図 5.3 に中心視野、0.27 °、0.375 °の 3 方向におけるスポット図を示す。スポットサイ
104
第 5 章 望遠鏡・検出器の仕様と課題
図 5.2: JASMIE 光学系 Layout(Korsh 系)
図 5.3: JASMINE 光学系のスポットダイヤグラム
5.2 光学系デザイン
105
Surf
Type
Radius
Thickness
OBJ
STANDARD
Infinity
1
STANDARD
STO
Glass
Diameter
Conic
Infinity
0
0
Infinity
3100
2040.579
0
STANDARD
-7200
-2900
MIRROR
2000.91
-0.9861102
3
STANDARD
-2333.348
1750
MIRROR
430.6424
-5.174046
4
COORDBRK
-
0
-
-
5
STANDARD
Infinity
0
142.724
0
6
COORDBRK
-
-1800
-
-
7
STANDARD
3171.834
1800
600.1363
-0.7149477
8
STANDARD
Infinity
1700
402.7171
0
9
COORDBRK
-
0
-
-
10
STANDARD
Infinity
0
424.8411
0
11
COORDBRK
-
-2900
-
-
12
COORDBRK
-
0
-
-
13
STANDARD
Infinity
0
570.6581
0
14
COORDBRK
-
3633.333
-
-
15
COORDBRK
-
0
-
-
16
STANDARD
Infinity
0
758.6172
0
17
COORDBRK
-
-3300
-
-
IMA
STANDARD
-18670.66
872.8559
0
MIRROR
MIRROR
MIRROR
MIRROR
MIRROR
表 5.1: SURFACE DATA SUMMARY
ズとの比較のため、2m 鏡でのエアリーディスクのサイズも同時に描かれてある。見ての
通り、エアリーディスクのサイズに対して充分に小さくスポットが収まっており収差は非
常に良好である。
スポットサイズの定量的視野依存性を表したのが図 5.4 である。横軸は視野中心からの
角度で測った距離、縦軸はスポットサイズである。スポットサイズは典型的に見て 0.6 μ
mである。JASMINE の設計ではエアリーディスクのサイズは検出器上でおよそ 60 μm
となり、それと比べて充分に小さい。1 ピクセル 15 μmと比べても充分に小さいサイズ
でありアストロメトリ観測に必要な精度が達成されていると考えられる。同様の内容を
Wavefront error で示したのが、図 5.5 である。横軸は同様に視野中心からの角度で測っ
た距離で、縦軸に RMS で表した Wavefront error を示している。Wavefront error を示
した図 5.5 では回折限界の値も記してある。回折限界およそ 0.07waves に対して error は
106
第 5 章 望遠鏡・検出器の仕様と課題
図 5.4: スポットサイズの視野依存性
図 5.5: RMS Wavefront error
5.2 光学系デザイン
107
図 5.6: Curvature と Distortion
視野全域にわたり、0.001waves 程度であり、この光学系は回折限界で決まる光学系であ
ることが解る。
次に示す図 5.6 は、視野の湾曲とディストーションをあらわす。図 5.6 の左は像面湾曲
を示す図である。縦軸が視野中心から角度で表された距離で、横軸に湾曲に関するずれが
与えられており、これは 0.1mm 以下に抑えられている。図 5.6 の右は像の歪みをあらわ
すディストーションが視野によってどの程度かを表している。視野中心から離れる程大き
いが最大でも 0.02 %程度であり、十分に小さいと考えられる。グリッド上のそれぞれの
場所での Distortion を表したものも図 5.7 に示しておく。また、Distortion によるずれ
の量は 100 倍に拡大している。
次に、PSF がどのような形状になっているかを見る。中心からある半径内に占めるエ
ネルギーの割合を示す Encircled Energy Fraction を図 5.8 に表す。始めの Dark ring の
場所、すなわち 30 μ m での Encircled Energy は 63 %程度となっている。理想的な円開
口での PSF では 84 %程度となるが、副鏡による中心遮蔽があると一般には始めの Dark
ring での Encircled Energy は小さくなる。開口形状は次のフーコーテストパターンより
読み取る事が出来、図 5.9 に表す。既に述べたように、スポットサイズが充分に小さく設
計されているので、フーコーパターンは非常に均質である。ここで示された中心の遮蔽は
副鏡によるもので、この光学系の開口の形状を表している。中心の遮蔽の割合は 35 %程
度であり、エアリーディスク内での Encircled Energy が 63 %程度となっているが、これ
は許容範囲である。
108
第 5 章 望遠鏡・検出器の仕様と課題
図 5.7: Grid Distortion
図 5.8: Encircled Energy
5.2 光学系デザイン
109
図 5.9: フーコーテストパターン
PSF に関しては図 5.10 のようになる。中心遮蔽された開口形状であるため、エアリー
ディスク内での Encircled Energy が 63 %程度となる分、First ring の明るさが若干強
まっている。
今度は JASMINE の具体的状況を加味して考える。JASMINE の場合、2 つの天空領
域を鏡の上半分と下半分に分けてビーム混合鏡にてひとつの光軸に投入して同一焦点面に
焦点を結ぶように設計される。すなわち、ひとつの領域に対しては開口面積の半分を用い
る事になる。具体的形状は図 5.11 参照。ここで示す開口をもつ場合、PSF は図 5.12 のよ
うになる。鏡が半分になったことにより PSF がスキャン方向に対して直角方向に伸びた
形になるが我々は基本的にはスキャン垂直方向のデータは 1 次元圧縮させるのでスキャン
方向に対する精度が問題であり、この方向に対する PSF のサイズは鏡を半分にしない場
合とまったく同じである。このことは理論的にも示される。
●まとめ
広視野ゆえ副鏡による開口中心部の遮蔽が 35 %程度あるが問題にはならないだろう。
スポットサイズは PSF サイズに比べて充分に小さく、相当に良好である。Wavefront
error で言えば、回折限界およそ 0.07waves に比べて、視野全域にわたり、0.001waves 程
度であり、この光学系は回折限界で決まる光学系であることが解る。Distortion に関して
も 0.02 %と非常に小さく、アストロメトリ観測には好都合である。従って JASMINE の
光学系の有力な候補となりえる。
110
第 5 章 望遠鏡・検出器の仕様と課題
図 5.10: ビーム混合鏡を除いた光学系の PSF
図 5.11: フーコーテストパターン(一つの領域に対する開口形状)
5.3 超軽量鏡
111
図 5.12: ビーム混合鏡の形状を考慮した PSF
5.3 超軽量鏡
JASMINE で用いられる大型の鏡には視野混合鏡 1m×2m と主鏡 2mΦ とがあり、いず
れも古典的な手法で製作すると1トンを超える重量となり、このままでは打ち上げ不可能
である。重量を減らし打ち上げコストを下げることが最重要課題となる。そのための大幅
な軽量化の工夫が必要である。L2 軌道で撮像により高精度の位置決めを行うためには、
重量以外にもこれら鏡に要求される機能があるので簡単にまとめてリストする。
回折限界に近い鏡面精度 プロジェクトとしては回折限界の数百分の一の位置分解能を目
標とするが、重心の検出が主眼であるので、回折限界の数百分の一の鏡面精度は必要
としない、が鏡面精度の劣化による光子の散逸によって、観測効率が下がることは避
ける必要がある。そのためほぼ回折限界に近い鏡面精度が必要である。
温度安定性 温度変化により結像の条件が変わることはある条件では致命的である。サン
シールドなどの工夫によって環境として恒温の条件を整えるので、環境条件と総合し
て考慮する必要がある。動作温度で熱的に安定であることは非常に有利である。
低温条件 選択する観測波長により望遠鏡本体の動作温度が変わってくるが、システムと
しては検出器の動作温度と同一温度で運用することが効率的・高性能であると考えて
いる。従って、鏡面は極低温で光学性能を保持する必要がある。常温での研磨等を考
慮すると光学性能の劣化にたいするなんらかの補償システムが必要となるかもしれ
112
第 5 章 望遠鏡・検出器の仕様と課題
ない。
望遠鏡の大型鏡の軽量化の目的はアメリカの進める NGST など多くの計画されている
光赤外の軌道望遠鏡、8m 級望遠鏡の次世代となる数十メートル級の望遠鏡への応用など
があり盛んに開発が進められつつあるのが現状である。口径、観測波長域など、ミッショ
ン毎に要求仕様が異なるのでそのまま JASMINE に適用することはできないが、共通要
素も多くあるので、JASMINE での応用を考慮した上で現状での超軽量鏡開発の現状を
概観することは意味がある。現状での開発は大きくふたつに分類される、一つは NGST
の望遠鏡部分のコンペティションのための開発であり、比較的完成度は高い、これを応用
して、JASMINE の仕様にあわせた開発を進めることが可能である。しかしながら、一見
して構造が複雑で将来的にはより簡便な現在さかに行われている開発が成功すれば代替
される可能性は高い。早い時期での実現を目指す場合や、新材料の応用がうまく行かな
かった場合には有力な超軽量鏡製作の手段となろう。ここでもう一つの開発とは、もとも
とは航空機器の耐高温材料として開発が進められていた、炭化硅素を主体とした鏡面とし
ては新構造材料の開発である。現状では、新材料の製作法の開発が一段落というところ
で、光学材料の評価が進められ始めた段階で、研磨などさらに開発要素は多く、現状での
JASMINE 適用への可能性が明らかになったわけではない。しかしながら、もともと構造
材料としては実績のある材料なので、鏡筒と光学系を一体とした構造体を構成できる利点
は大きく、材料のもつ高剛性とあわせ超軽量鏡材料としての魅力が大きい。
5.3.1 JWST(NGST の新呼称)の開発
1996 年に設定された JWST の光学系に対する要求条件は次のものであった。
• 波長範囲 1–5 ミクロン (0.6 から 30 ミクロン)
• 2 ミクロンでの回折限界 w 達成すること
• 30–60K で動作すること
• 面密度 15kg/m2 以下であること
これにもとづいて Ball, Kodak, Goodrich, University of Arizona, Coi などが開発を行っ
た。材料として Berylium, fused silica, zero dure, bolo silicate などがそれぞれ採用され
た。いずれも、薄メニスカス鏡を用い軽量化をはかり、多数のアクチュエーターを軽量構
造の上に配置し、アクティブに制御することにより必要な精度を達成するものである。こ
れらにともなって、軽量マイクロアクチュエーターの開発や、極薄の鏡面の製作技術など
が開発された。これらは今後に応用可能な斬新で興味深い技術である。
5.3 超軽量鏡
113
5.3.2 新材料の開発
JWST の開発とは別に、特に波長の長いサブミリ、赤外線などのスペース機器での応用
を目指して、新材料を用いた、軽量鏡の開発が盛んに行われるようになってきた。これら
は炭素系の高剛性材料を用いることにより軽量化を計るものである。日本での開発に限っ
てもカーボンカーボン、C/SiC、SiC、反応焼結型 SiC、焼結型 SiC などがあり、それぞ
れの特徴がある。これらの材料は高硬度である利点はあるが、もろさ、鏡面用としての表
面特性、温度特性など超軽量鏡としての適性が不明であり、基礎的な開発評価が実行され
ているのが現状である。Astro-F では SiC 構造体に SiC を CVD で形成して鏡面として
いる、また宇宙研の赤外天文衛星計画である SPICA でも、新素材の開発が進めれられて
いる。
1)C-C
カーボンカーボン天文用を目的として、国立天文台の太陽物理グループが三菱電機と共
同して基礎開発を進めている。縦横に織り込んだカーボンファイバー布をエポキシ系樹脂
で固める。これを高温で焼ことによりカーボン以外の材料をとばすことにより製作する。
膨張係数が小さく硬度が高くファイバー構造によって割れにくいことが特徴と思われる。
カニゼンをメッキし研磨して光学面利用する方法が検討されている。
2)C/SiC
宇宙研のグループが三菱と行っている。カーボンファイバーの短く切った繊維をコアに
して SiC で固める。繊維を混ぜることによりもろさを軽減する。低温特性や材料の不均一
性に由来する表面形状の評価試験などが行われている。
3) 焼結型 SiC
ハーシェル宇宙望遠鏡の SiC 3.5m 鏡が良く知られているが、SiC の粉末を高圧で整形
し、形状加工した後に高温で焼結する。焼結時に形状が大幅に変わることや光学面として
どこまで短波長までに対応できるかはまだ未知数である。京都とセラミックと理研のグ
ループが製作評価試験が行われている。
4) 反応焼結型 SiC
東芝で開発されている方法であるが、炭化ケイ素粉末と炭素粉末からなる成形体を作製
し、これに溶融したケイ素を含浸して、炭素とケイ素を反応、炭化ケイ素を合成する方法
である。粒径を制御することにより、強度を飛躍的に上げることに成功した。鏡面への応
用は開発事業団のグループがおこなっている。
多様な材料を用いることが可能である、いずれも JASMINE 光学系に適用するための
基礎材料がそろっていない。現時点では基礎的な評価開発、応用研究を進めることが必要
である。今のところ各所で盛んに評価開発が進められているのでこれらとの連携を強めつ
114
第 5 章 望遠鏡・検出器の仕様と課題
つ、JASMINE でも固有の評価開発を進めることが必要であろう。また実用化の段階で
も、各段階で要素技術の開発が必要となってくる。
5.3.3 新研磨技術の進展
ガラスの研磨剤として良く用いられるカーボランダムは SiC である。従って従来の方法
で SiC 鏡面を研磨することは大変である。非常に硬い新しい複合材料を光学面とする必
要がでてきているわけであるが、従来のガラスの研磨方法をこれに用いると途方もない時
間がかかることになる。研磨技術についても近年著しい進展があり、多様な鏡面整形技術
が開発実用化されている。以下現状を紹介するが、将来において充分実用になる技術はす
でに見えて来ている。
光学面の測定技術と多軸のナノメーターレベルの計算機による数値制御により、思いの
ままの光学面が製作できるようになりつつある。
ここでは、最近発展してきた新しい研磨方法についてまとめておく。
1) ELID 研削法 (ELectrolytic In-process Dressing) 理研
ELID は 鋳 鉄 で 結 合 し た ダ イ ヤ モ ン ド の 砥 石 を 使 い 、電 気 分 解 で 目 立 て を し
な が ら 、精 緻 に 研 削 し て い く 手 法 で 、研 削 に よ り 鏡 面 の 作 製 が 可 能 で あ る 。シ
リ コ ン 、セ ラ ミック ス や ガ ラ ス 、フェラ イ ト、高 硬 度 鋼 材 、複 合 材 料 な ど 、硬
質 か つ 難 加 工 性 を 持 つ 機 能 性 材 料 に 対 し て 、高 能 率 か つ 高 品 位 に 鏡 面 加 工
を 実 現 で き る 新 加 工 技 術 と し て 、現 在 広 範 な 用 途 に 実 用 化 が 進 ん で い る よ う
で あ る 。ELID 検 索 法 の 基 本 原 理 に 関 し て は 、理 研 ニュー ス No.244 2001 10
(http://www.riken.go.jp/r-world/info/release/news/2001/oct/#fro 01) に紹
介されている。
2) 東芝など 超精密旋盤
超精密な球面,放物面,非球面形状の光学部品を単結晶ダイヤモンド工具により切削加
工を行う。被削材は軟質金属やプラスチックに限定されるが,高硬度鋼やセラミック,ガ
ラス等に対応するため、研削をもちいた超精密非球面研削盤が開発されている。
3) Canon 社 CSSP(Canon Super Smooth Polisher)
精密な測定とそれを研磨の滞在時間にフィードバックすることにより超精密な自由局面
の加工を可能にする。キャノンの CSSP は、
http://www.canon.co.jp/employ/engineer/detail/35.html#02 に 紹 介 さ れ て い
る。
4) Nikon 社 RF Plasma CVM (Chemical Vaporization Machining)
大気圧下において電極 の近傍だけに局在的にプラズマ生成し、このプラズマを利用し
て加工を行う超精密加工法である。 プラズマCVMでは、プラ ズマ中で生成させた反応
5.3 超軽量鏡
5.13:
左:研 削 加 工 例 中:研 削 加 工 例 右:切 削 加 工 例 。図 は
http://www.toshiba-machine.co.jp/preci/contents/hikyumen.html
図
よりダウンロード、東芝機械精密機器営業部より転載許可を得た。
種と、被加工物とを反応させ、気化させることにより除去が 進行するため、従来の機械
的な加工法では難しい、複雑な光学部品の加工も可能となる。
図 5.14: プラズマを生成してレンズを加工する方法。この方法で形状精度 0.1µm 以
下、表面粗さ 0.5nm 以下の加工精度を達成できる。(画像提供 株式会社ニコン)
http://www.nikon.co.jp/main/jpn/profile/technology/index.htm(ニ コン
テクノロジー、技術紹介のページ) 以下に、関連する加工技術が紹介されている。
5) Epion 社 GCIB(Gas Cluster Ion Beam) System
ガスクラスターイオンビームは数百個から数千個の原子あるいは分子の塊を真空中で
形成し、イオン化、加速して加工する。固体表面を原始レベルで加工することが可能で
ある。
115
116
第 5 章 望遠鏡・検出器の仕様と課題
図 5.15: GCIB の基本動作原理。http://www.marubun.co.jp/sanki/pdf/epion.pdf
より転載。図の版権は、山田公京都大学名誉教授 (工学部) にあり、丸文株式会社を
通じて転載許可を得た。
6) NTGL 社 IBF (Ion Beam Figuring)
真空中で小口径のイオンビームを照射ラスタースキャンすることで固体のナノメー
タレベルでの成形を可能にする。スキャン中の滞在時間を制御する。NTGL 社の Ion
Beam Figuring の動作原理は、http://www.ntgl.de/eng/index-eng.html に紹介さ
れている。
7) Zeeko Presessions Process
研 磨 ヘッド の 多 軸 で 制 御 。コ ン ピュー タ ー 制 御 さ れ た 超 高 精 度 で の 制 御 を 光
学 面 の 研 磨 に 応 用 す る 。Zeeko Presessing Process は 、Zeeko 社 ホ ー ム ペ ー ジ 、
http://www.zeeko.co.uk/technology/index.html に紹介されている。
8) QED Technology MRF (MagnetoRheological Finishing)
5.4 焦点面
117
磁気流体粒子を照射することにより研磨を行う。磁場をかけることで磁気流体を制
御するが、基本的に対象物の多軸のナノメーターレベル位置制御にもとずくので、回
転体、平面など、多様な加工が実現される。QED Technology MRF の動作原理は、
http://qedmrf.com/technology/how.shtml に紹介されている。
5.4 焦点面
z-band 仕様の場合、良像が得られる領域に 4K × 2K の検出器を 9(スキャン方向)
×18 = 162 個並べる。K-band の仕様の場合、良像が得られる領域に 4K×4K の検
出器をを 6(スキャン方向)×7 = 42 個並べる。検出器の個数に関しては z-band 仕
様、K-band の仕様の場合で相当異なるが焦点面のサイズとしては、z-band 仕様の場
合 55.3cm×55.3cm、K-band の仕様の場合 44.2cm×51.6cm といずれの場合にせよ凡そ
50cm 四方程度である。実視野は z-band 仕様で 0.475◦ × 0.475◦ で、K-band 仕様では
0.385◦ × 0.450◦ となる。z-band 仕様の場合では、可視光でいくつかのバンド(例えば、
V, R など)と可能ならば J, H 用も設置することで、photometry の観測も行う計画であ
る。K-band 仕様でも同様に、photometory 用として J-band, H-band の 2K × 2K の検
出器を置く予定である。さらに両バンドともに sky mapper 用に 2K × 2K の検出器複数
個をアストロメトリ用の検出器に星像が入る前に置く予定である。sky mapper の主な機
能は次の通りである。(1) 衛星の scan rate を確認し、TDI モードの転送レートを、アス
トロメトリ用検出器に伝達する。(2) 入ってきた星像の明るさをもとに、window をかけ
る領域を決定し、アストロメトリ用検出器に伝達する。(3) 明るい星の場合、saturate し
て電子が溢れないように、途中で電子を逃してやる機能を作動することを伝達する。(4)
基準星による、衛星姿勢の確認。
sky mapper に必要な検出器の個数、アストロメトリ用検出器への伝達機能などは今後
の検討課題である。
5.5 検出器
何度も述べたように、近赤外線での観測は JASMINE 衛星の他にはない特徴で、これ
により独自の科学成果が期待される。しかし、実際に近赤外線のどこの波長域で観測を
行うかは慎重に考えなければならない。得られる科学成果を最優先で考慮することは当
然であるが、それ以外にも検出器の実現可能性、衛星システムからの制限、コスト等、
さまざまな技術課題を考慮することが重要である。特に検出器開発は重要な要素であ
る。JASMINE の検出器に対する要求をまとめると、赤外線に対して感度があること、
TDI(Time Delay and Integration) モード、あるいはそれに類する連続観測用のモード
118
第 5 章 望遠鏡・検出器の仕様と課題
が利用可能であること、pixel サイズの 1/300 程度の星像中心位置決定精度を持つことで
ある。4.2.3 節でも述べたように現段階で我々が検討している検出器は次の 2 種類である。
(i) HgCdTe などの赤外線有感物質を、シリコンの読み出し回路にはりつけるハイブリッ
ド式、2µm を超える波長まで感度を有する、(ii) 通常の CCD のようにモノリシックなシ
リコン基板で作られるが、特殊なシリコン基板を使用することにより、可視光から波長
1µm の近赤外線まで感度を有する新タイプの CCD である。
サーベイ観測を行なう場合、TDI モードあるいはそれに類する連続観測用のモードを
持つことは、三つの利点がある。
1. 観測効率が向上する
2. またデータ転送レートを低く押えられる
3. 感度補正が有利である
従って、サーベイ観測においては必須の技術である。例えば SDSS(Sloan Digial Sky
Survey) などでも TDI を利用している。TDI は、CCD では容易に実現可能であるが、ア
レイ型検出器の場合には新たな開発が必要となる。検出器側で連続観測用のモードが利用
できない場合、2MASS で行われているように副鏡によるスキャンを行なう、望遠鏡自身
をステップでポインティングするなどの代替方法が考えられる。副鏡によるスキャンは、
光学系に新たな可動部分を設けることになる。副鏡の向きを正確にモニターしなければ
ならないことと、副鏡の動きが衛星自身の姿勢にも影響を与えるため、衛星の姿勢制御、
あるいはモニターの問題が発生する。望遠鏡自身、すなわち衛星自身をステップでポイン
ティングする場合、同時にポインティング精度を確保する必要があり、また衛星が動いて
いる状態ととまっている状態を交互に行うことから衛星の姿勢を高精度かつ安定にどこま
で制御できるか慎重に検討する必要がある。また、連続観測モードで無い場合は、電荷を
蓄えて一度で読み出すことになるので、読み出しに時間がかかるため観測のデューティー
サイクルが減少し、またピークのデータ転送量が大きくなることに対処しなければなら
ない。
観測波長としては、上で述べたように 1µm 帯 (z-band) および 2µm 帯 (K-band) を想
定している。5.5.2 章に述べるように、1µm 帯で使用可能な CCD は、まだ開発段階にあ
り現時点で容易に入手が可能というわけではないが、開発が順調に進みつつある。従っ
て、z-band での観測を行うならば、CCD を使って TDI モードを利用することが可能で
ある。z-band は K-band より波長が短いため、ダストによる吸収の効果は受けやすくな
るが、興味ある星(K,M-giant など)の絶対光度が、z-band 付近で明るいため、吸収に
よる悪影響を補えることと、波長が短いことにより、同じ位置精度を達成するために必要
な光子数が少なくてすむ。そのため、比較的暗いところまで高精度が達成し、高精度で観
測できる星の数は K-band の場合と比べても勝るとも劣らない (4.3 節参照)。観測波長を
5.5 検出器
119
1µm 以下に押えて CCD を利用することの利点は、現在開発中の赤外線に感度を持たせ
ることは別として、可視領域の CCD 自体の技術は成熟していることである。このため、
製作しているメーカーも多く、良質の製品を得ることが可能である。そう言ったメーカー
に協力を求めれば、赤外線領域での新たな開発もやりやすい。また、比較的高温で動作可
能で、大フォーマットのものが安価に入手可能である。
K-band まで長波長になるとダストによる吸収の影響はかなり少なくなる。しかし現
在、K-band で TDI モードモードが可能な感度もよい検出器はない。そこで、(i) のよう
な方法で新しい赤外線アレイの開発を試みるものである。ただ、長い波長まで感度がある
ものの、後者に比べ構造がやや複雑という特徴があるが、現在、科研費基盤研究 (A) が採
択され、精力的に開発を検討している段階である。
さて、すでに述べたように検出器は JASMINE 計画の性格を大きく決定づけるので、
我々はスケジュールの許す限り、この両者の試作、評価を精力的に行う予定でいる。以下
でそれぞれの開発要素について詳述する。
5.5.1 赤外線アレイ検出器
2 ミクロン波長帯は可視に比べはるかに星間減光が小さく銀河系内部の星を観測するた
めには最適の波長域である。しかしながら赤外線のアレイ検出器には、可視波長域用いら
れる CCD に比べ多くの技術的な困難を伴う。以下、赤外線アレイ検出器の現状について
簡単に概観し、JASMINE における問題点を検討する。今のところ3つの問題点は解決さ
れていない。
天文用赤外線用アレイ検出器の現状
いわゆる近赤外線波長域で用いられる赤外線アレイ検出器には、HgCdTe、InSb, PtSi
を用いたものがほとんどであり、2ミクロン帯での天文撮像を考えるとほとんど HgCdTe
に限られてしまう。現在天文用短波長 HgCdTe 検出器を供給しているのは唯一 Rockwell
社のみであり、最近 Raytheon 社が HgCdTe のアレイ検出器の製造を始めている。現在
入手できる最大フォーマットの HgCdTe 赤外アレイ検出器は 2048×2048 ピクセルのも
のであり Rockwell 社と Raytheon 社から入手することができる。Rockwell 社は 2K×2K
の素子を4つモザイクとして合成した実質 4096×4096 素子の大型素子の開発にも成功し
ている。なお、Raytheon 社は HgCdTe に加え 2048×2048 の InSb アレイ素子を開発し
ており、これは2ミクロン帯に感度がある。しかしながら波長を2ミクロン帯に限る場
合、低い動作温度、熱赤外線からの雑音対策、など取扱が難しくなるため、あえて InSb
を採用する利点は少ない。
120
第 5 章 望遠鏡・検出器の仕様と課題
JASMINE のための赤外線検出器
JASMINE の計画では 2k×2k HgCdTe アレイ約 160 個(4k×4k の場合は、約 40 個)
の検出器を焦点面にモザイク配置する。
1) 赤外アレイは高価である。現状での 2k×2k アレイの価格は1個5千万円である。
JASMINE で必要とする個数を確保しようとすると、約80億円が必要となる。低価格の
赤外アレイの開発が望まれるが、サブストレイトとして用いられる CdZnTe 材料の値段
で価格が決定されているのが現状である。ちなみに現状で CdZnTe の基板を供給してい
るのはある日本の企業が唯一だそうだ。
2) 大量供給に問題がある。現状で大フォーマット HgCdTe 赤外アレイを供給できると
ころは Raytheon と Rockwell の二社のみであるが、現状の設備では大量にアレイを供給
することは困難なようである。例えば、16個の 2k×2k アレイを2年間で供給すること
が、チャレンジングなようである。
3) 現在供給されている赤外線のアレイは DRO と呼ばれる MOS を用いた直接読みだ
し方式のためそのままでは、TDI(Time Delay and Integration) モードの観測を行うこ
とができず、サーベイの効率が極めて悪くなる。
新モードに対応した赤外線アレイ検出器の開発に検討を進めた。これを実現する手法と
してはいくつかの方法が原理的に可能と思われる。HgCdTe の赤外センサー部分と薄化
裏面照射型 CCD をインジウムボンディングによって結合することによって赤外光によっ
て生成された電子を TDI モードで動作できる CCD 部分に転送することが可能である。
HgCdTe から CCD への転送効率が問題となり、高精度を達成するためには電荷を注入
する回路を付加する必要がでてくる。また読みだし回路として CCD を用いず、いわゆる
DRO 型の読みだし回路を用いたままで TDI モードの観測を実現することも可能である。
その場合蓄積用のバッファーをピクセル数だけ独立に用意し、ここに電荷をスキャニング
しながら転送、加算する。2 K レベルの多段の TDI を実現することは、なかなか難しそ
うである。またバッファー回路を別に用意するため開口率に問題がでる可能性がある。ま
た既存の赤外アレイをそのまま用い、すべてのピクセルをデジタル化しデジタル処理を行
うことにより TDI を実現することも可能である。ハードが大がかりになる、積分時間等
に制約ができるなどの問題がある。
5.5.2 新タイプの CCD 開発
最新のシリコン材料技術を用いると、極めて電気抵抗率の高い素材が得られる。これ
5.5 検出器
図 5.16: CCD の感度曲線。太線が開発されたプロトタイプのもの、一点鎖線が従来
の素子、点線が最終目標のもの
を用いて CCD を作ると光に対する有感層である「空乏層」の厚さを厚くすることができ
る。例えば厚さ 300µm のシリコン基板全体を「完全」に空乏化することができれば、近
赤外線領域の波長 1µm での感度をこれまでの 5 倍程度まで向上することができる。次世
代のすばる望遠鏡用の CCD としても、この「完全空乏型」CCD の開発を進めてきてい
るが、少し最適化のパラメーターを変更すれば、JASMINE 衛星の検出器としても使用で
きる。現段階で、最初の「完全空乏型」CCD プロトタイプの評価が終わり、空乏層は約
100µm に到達し、2-3 倍程度感度の向上していることが分かった (図 5.16 参照)。これに
より我々のアプローチの正しさが実証された。
現在、材料とプロセス条件を検討することで、まず、厚さ 300µm のシリコンの基板の
完全空乏化を目指している。こうして CCD から光に対する不感層を無くせば、光を素
子の裏面から照射することができる。この裏面照射 CCD では、配線材での光の吸収を
さけることができるため、紫外線の感度も飛躍的に向上する (図 5.16 の点線を参照)。従
来の素子で裏面照射を実現しようとすると、エッチングにより不感層を削り落す必要が
121
122
第 5 章 望遠鏡・検出器の仕様と課題
あり、この工程の歩留まりが悪かったため CCD の価格が高かったのである。したがっ
て、この工程が不要な完全空乏型 CCD では、価格を飛躍的に下げることも可能となる。
JASMINE 衛星計画では無欠陥の素子が 160 個程度と大量に必要になるため。この歩留
まり改善は非常に重要なポイントである。
我々はフォーマットが 2048 × 4096 ピクセルで裏面照射の完全空乏型 CCD の量産技
術の開発の目処を、今後 3 年程度で立てたいと考えている。その後赤外線ハイブリッド方
式の検出器と比較検討を行い、決定が下れば量産を開始する。この 3 年で行うべき仕事を
整理すると以下のようになる。
(a) 裏面入射化のための光学特性のよい膜の成膜技術を開発。JASMINE の仕様に合うよ
うに、1µm 付近に感度のピークを持つものを開発する。先ず、4 インチ wafer を用いたテ
スト素子 (2048 × 2048)の基礎実験をまとめる。
(b) 2048 × 4096 ピクセルの大フォーマット素子の設計、及び試作。またこの大型素子の
組み立て技術の開発。
(c) 大型素子の量産。そして、CCD 約 200 個からなる大型焦点面の設計、試作。熱試験、
振動耐久性試験を行う。
(d) 大規模かつ低ノイズ、低消費電力の衛星搭載用読み出しエレクトロニクスの開発。宇
宙研、KEK と協同で JASMINE 用アナログ VLSI の設計開発を行う。
5.6 ビーム混合鏡と basic angle
JASMINE では星の座標、年周視差、固有運動を測定するため、同時に大角度離れた 2
方向を観測する必要がある (§7.3 を参照)。ただし、2 台の望遠鏡を用意して 2 方向を同時
観測する手法はとらずに 1 台の望遠鏡で 2 方向を観測するように工夫する。そのため天体
からの光を直接主鏡に取り入れる事はせず、平面鏡を用いて同一光軸上に 2 つの異なった
方角からの光束を望遠鏡に取り入れる。すなわち、望遠鏡の 1 枚の主鏡を 2 方向の観測で
共有するため、上半分、下半分がそれぞれ異なる天空の領域を担当するようにする。以上
の手法をとる事により、光学系は 2 台望遠鏡を用意する必要がなく簡素化され、また検出
器に関しては同一焦点面を用いるため個数が半減できる。検出器上の星のデータは 2 つの
視野が重なっているがこれは解析の際に分離が可能である。
以上で述べた 2 方向の観測を 1 台の望遠鏡で行うため、概観図である図 5.17、もしく
は図 5.18 に示すように第 1 副鏡がある場所に 2 つの異なった方角をむいた平面鏡、すな
わちビーム混合鏡を設置する。またこの観測される 2 方向のなす角度、すなわちベーシッ
クアングルは星の位置と衛星姿勢の変動を解く際に生じる解の縮退が起こりにくい角度を
用意する。また、年周視差を求めるために有効な 90 度付近の角度を用いる。そこで以上
の条件を考慮の結果、JASMINE では 99.5 °と定める。従って、このビーム混合鏡の平
5.6 ビーム混合鏡と basic angle
123
図 5.17: JASMINE 概観
面鏡はベーシックアングルの 2 分の 1 の角度、すなわち互いに 49.75 °を成して設置され
る。このビーム混合鏡の必要性、ベーシックアングルの角度に関する詳細はベーシックア
ングルの章(§7.3)を参照されたい。
124
第 5 章 望遠鏡・検出器の仕様と課題
図 5.18: 光学系部分とビーム混合鏡
125
第6章
衛星システム
この章の目次
6.1
6.2
概要(衛星全体のデザイン、打ち上げロケットなど) . . . . . . . . . 125
熱構造体(構体系、熱制御系など) . . . . . . . . . . . . . . . . . 129
2 秒スケールでの振動、変動の許容範囲 . . . . . . . .
自転 2 周の時間スケール精度要求 . . . . . . . . . . .
観測年数、回数によるパラメータ見積もり精度依存性 .
その他、要求精度 . . . . . . . . . . . . . . . . . . .
熱構造解析 . . . . . . . . . . . . . . . . . . . . . . .
basic angle の熱変動 . . . . . . . . . . . . . . . . .
衛星姿勢と軌道 . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 他のプロジェクトとの相違点 . . . . . . . . . . . . .
通信、電力、重量 . . . . . . . . . . . . . . . . . . . . . .
6.4.1 通信量について . . . . . . . . . . . . . . . . . . . .
6.4.2 通信アンテナについて . . . . . . . . . . . . . . . . .
6.4.3 電力について . . . . . . . . . . . . . . . . . . . . . .
6.4.4 重量について . . . . . . . . . . . . . . . . . . . . . .
6.2.1
6.2.2
6.2.3
6.2.4
6.2.5
6.2.6
6.3
6.4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
129
132
133
133
134
135
137
138
138
138
140
141
141
6.1 概要(衛星全体のデザイン、打ち上げロケットなど)
衛星は、大きく2つの部分に分けられる。1つは、ミッション部と呼ばれるもので、衛
星の利用目的を遂行するものである。つまり、JASMINE の場合は、望遠鏡、検出器と
いった観測装置の総体を指す。もう一つは、そのミッションの働きをサポートするバス
部である。バス部は次のようなサブシステムからなる [茂原正道, 1995]。
(1) 構体系:搭載機器を装着し、必要な形状保持し、機器のアラインメントを保ち、打ち
上げ時、軌道上の機会的な負荷から機器を保護する役割をもつ。
(2) 熱制御系:各機器の温度を許容温度範囲の中に収め、熱的な保護を与える。
126
第 6 章 衛星システム
(3) 姿勢・軌道制御系:衛星の姿勢を所定の方向に向け安定させる。必要な場合は、その
姿勢を変更し、また軌道を修正する。また、二次推進系は、軌道の維持または変更、さら
に姿勢の変更のために大きな推力がだせるスラスタなどからなる。
(4) 通信系:地上からのコマンドを各搭載機器に中継し、その遠隔操作を行うとともに、
衛星内の温度、電圧などの状態を測定し地上に送信する。もちろん、観測で得られたデー
タも地上に電送する。また、衛星を追跡するための信号を送る。
(5) 電源系:太陽電池パドル系からの一次電力の供給を受け、必要な電力を作りすべての
搭載機器に供給する。また、食の時などパドルからの電力がない場合の電力源として、
バッテリをもつ。
JASMINE も上記のようなバス部をもつ必要がある。特に JASMINE は、高精度な位
置測定を目的とするため、高度な安定性を要求する。温度変化に伴う観測装置の構造変化
や姿勢制御などによる振動を極力小さく抑える必要がある。JASMINE 衛星全体のデザ
インとしては、望遠鏡部を主要とし、それが bench に支えられている (図 6.3、もしくは
6.2 節参照)。その bench は、電力系、通信系、二次推進系などのバス部の上に設置され
る。以上を太陽シールドの上に設置する。太陽シールドの太陽に面する側には太陽電池パ
ドルを設置する。
以上のような衛星システムを打ち上げロケットのフェアリングに収める必要がある。打
ち上げロケットを何にするかに依存するが、JASMINE は有力候補として、H-IIA ロケッ
トの dual launch を想定している。JASMINE は、サイエンスの目標達成の範囲内でなる
べく技術的、予算的に可能な現実性がある仕様検討を努力していく。そのため、なるべく
打ち上げ費用が低コストであり、なおかつフェアリングが仕様要求に合い、また L2 ポイ
ントへ運べる重量が大きくできる打ち上げロケットを選択する必要がある。その候補とし
ては、もし H-IIA の dual launch の方が M-V ロケットよりも打ち上げコストが低いのな
らば、H-IIA の dual launch が有力候補となる。さらに、H-IIA の dual launch の場合、
L2 ポイントへの打ち上げ可能な重量は、もう一つの相乗りの衛星の軌道が L2 ではない
別の軌道であることを考慮しても約 1.2 トンもある (M-V の場合は、約 0.5 トンである)
というメリットがある。また、dual launch の場合で一番小さいフェアリングを選んだと
しても、M-V のそれよりも容積は大きい。従って、JASMINE としては、H-IIA の dual
lauch を想定する。ただ、その場合もいろいろなオプションがあるが (図 6.1 を参照)、一
番小さいフェアリングを想定して、その範囲内で可能な JASMINE 仕様を厳しく検討し
ている。この場合、衛星のサイズはおよそ直径 3.9m、高さ 3m の円柱内に収める必要が
ある。そのため、図 6.2 にあるようにミッション部(光学系)および、バス部は六角柱内
に収め、6 つの側面に遮蔽板を折りたたんでおき、H-IIA フェアリングに収納しされる。
軌道投入後図 6.3 のように展開する。
6.1 概要(衛星全体のデザイン、打ち上げロケットなど)
図 6.1: H-IIA フェアリングの様々なオプション。出典 宇宙開発事業団 (NASDA)
ホームページ。
127
128
第 6 章 衛星システム
図 6.2: JASMINE の H-IIA フェアリング収納時の様子
図 6.3: JASMINE 遮蔽板展開時の様子
6.2 熱構造体(構体系、熱制御系など)
129
時間 scale
決定事項
要求精度
精度要求理由
1 検出器
星像中心
姿勢振動
振動による星像の
光学振動
広がりを最小限にし、photon の
λ/D の 20 %
目減りをおさえる。
回転則
Basic Angle 変動
縮退をおこす nω0 のモードについて
ψ = ω0 t+
δγ < 10µas
解くため、そのモードで
(t ∼ 2s)
自転 2 周
(t ∼ 8h)
2年
δγ < 10µas でおさえる。
a sin(ωt + D)
アストロメトリ
トータル
最小 2 乗適用の際
パラメータ
8 グループ以上
各パラメータをうまく分離するため。
表 6.1: 時間スケール毎の要求精度
以下で JASMINE のバス部に関連する事項について順次説明を行っていく。
6.2 熱構造体(構体系、熱制御系など)
衛星は主に太陽輻射からくる熱変形、更にジャイロ、リアクションホイールなど、バス
部からくる様々な機械振動が常に存在し観測の妨げとなっている。精度の高い観測を行う
ためにこういった熱変形、機械振動から可能な限り守らなければならない。そこで、我々
が望む観測精度を達成するため必要となる熱変形、機械振動に対する制限がどの程度なの
かが問題となる。JASMINE では以下に示すようなタイムスケールでそれぞれどういった
精度要求があるのかをまとめた (表 6.1)。この章における以下での具体的数値は z-band
仕様の場合に統一してある。ただし、その要求値の評価を行う際には、次のような仮定を
行っており注意が必要である。
• λ/D の 20 % (PSF の 10 %)という要求値についてはおおよその値である。この値
そのものの妥当性は、今後も詳細な検討が必要である。
表 6.1 で示した精度要求に関する詳細を順に説明する。
6.2.1 2 秒スケールでの振動、変動の許容範囲
2 秒というタイムスケールの間に、星が検出器上を一つ分だけ通過する。この通過する
間に星からのフォトンを蓄えて星像中心を求めることになる。星像中心は 5 × 9 ピクセル
を取り出して求めるがその精度はフォトン数に依存する。従って振動により、取り出す 5
× 9 ピクセルからはみ出すとその分精度が悪化し、要求精度を満たさなくなる。5 × 9 ピ
130
第 6 章 衛星システム
振動数
許される振幅 λ/D を基準(mas)
0.16 以上
0.20λ/D (20mas)
0.16
0.20λ/D (20mas)
0.080
0.40λ/D (40mas)
表 6.2: 振動、変動で星像がボケないための振動数毎の許容振幅
クセルの幅を拡大すると確かにフォトン数の目減り自体は減るが、やはり PSF の形が変
形し分散が大きくなる事により精度良く星像中心が求まらなくなる。従って、いずれにせ
よ、振動変動によるずれを PSF のサイズをあらわす λ/D の 20 %、すなわち、エアリー
ディスク直径の 10 %としたい。これは角度にして 20mas である。この時 JASMINE 光
学系では λf /Dw = 2 となるように設計してあるので、検出器上ではおよそ 1 ピクセル以
内となる。検出器を通過する時間スケールより短い周期をもつ高周波領域では、振動振幅
分かならずぼやけるので要求する振動の振幅 A は
A=C
(6.1)
ここで、C は許容する誤差を表す定数で、20mas である。低周波領域では、検出器を通過
する間に一回分も振動しない。通過時間内で要求誤差 C 以下であれば良いので振動の振
幅 A が C(= 20mas) 以上あっても良い。具体的には
A=
C 1
πt ν
(6.2)
ここで、t は検出器を通過する時間、ν は振動数である。以上を第1番目の仕様要求、す
なわち、2 秒スケールでの振動、変動で星像がボケないための要求とする。表 6.2 を参照。
一方我々は 1 回の検出器による測定で星像中心決定の測定誤差をおよそ 70 分の 1 画素
以下に抑えたい。この精度が達成されるために許される振幅の大きさを振動数別にあらわ
したのが表 6.3 である。検出器を通過する時間スケールより短い周期をもつ高周波領域で
は1検出器を通過するまでに複数回振動する。その重心の位置はおよそ振動の原点である
が、フォトンの重心は検出器を通過する始めと終わりの振動の位相に依存し、これが重心
を狂わせる原因となる。しかし、高周波になればなる程始めと終わりの位相のずれは重要
でなくなり重心はずれにくくなる。そしてその分、振動振幅の精度要求は甘くなる。高周
波領域での許容振幅 A は
A = πδtν,
(6.3)
ここで δ は一回検出器での測定で必要な精度である。一方、低周波領域では1検出器通過
時間に1周期分も振動しないので最悪の場合、重心は振幅 A だけずれる。従って、低周
6.2 熱構造体(構体系、熱制御系など)
131
振動数
許される振幅 λ/D を基準(mas)
9.2
0.40λ/D (40mas)
4.6
0.20λ/D (20mas)
2.3
0.10λ/D (10mas)
0.23
0.01λ/D (1mas)
0.16
0.007λ/D (0.7mas)
0.16 以下
0.007λ/D (0.7mas)
表 6.3: 星像中心決定を要求精度出すための振動数毎の許容振幅
波領域での許容振幅は
A=δ
(6.4)
となる。ここで述べた、1 回の検出器による測定で星像中心決定の測定誤差をおよそ 70
分の 1 画素以下におさえる要求を第2の要求とする。
以上2つの「星がぼけない条件」と「精度をだす条件」の要求をともに満たす領域が許
容振幅領域でこれを満たせば理想的なサーベイが実現されている。図 6.4 の太線参照。
この条件を満たす事が出来ればそれに越した事はないが、満たさなくても振動による星
のぼやけでフォトンが目減りするという事さえなければ、解析の段で回転則に衛星の振動
を盛り込むことにより後から衛星の姿勢、星の位置などを解ける(§7.3 参照)。そこで、
前述したフォトンの目減りが少ないと考えられる条件、すなわち、検出器を通過する間に
PSF の 10 パーセント以下に振動が抑えられる条件を図 6.4 に書き加えてある(細線)。
この条件の線以下であれば、解析で解く事が出来る。
最終的に、星像がボケないための振動変動誤差の要求 0.20λ/D(20mas) が満たされて
おれば、4.6Hz 以上の振動数は精度を出すための条件の中に入っているので、要求精度
が自動的に満たされている。従ってこの場合、4.6Hz 以下の振動数のみ注意すればよい。
4.6Hz 以下の比較的低周波の振動に関してはできるだけ起こらないよう硬い構体系を作る
とともに、おさえきれない変動に関しては回転則に入れて解く事にする。
最後に星が検出器を通過する間の微小振動が 0.2 λ/D(20mas) の変動に抑えるための光
学系の各要素の振動変動の許容範囲を表 6.4 に示す。表を見て解る通り、ずれに対して、
第一副鏡が一番厳しい条件となっている。これは JASMINE のように非常に焦点の長い
光学系をコンパクトに収める時、副鏡による拡大率が大きいためである。回転変動に対し
てはビーム混合鏡、主鏡が厳しくなっているが、これは焦点面から光学的距離がもっとも
遠いためである。
132
第 6 章 衛星システム
図 6.4: 振動数毎の許容振幅のまとめ図
ずれ
回転変動
ビーム混合鏡
自由
w/2f = 12mas
主鏡
基準
w/2f = 12mas
副鏡1
w/F = 0.23µ m
w/2f0 k2 = 60mas
副鏡2
wk1 /k2 = 15µ m
w/2f0 = 300mas
平面鏡
w = 15µ m
w/2f0 = 300mas
表 6.4: 許容誤差見積もり表 (z-band, Korsh 系)
6.2.2 自転 2 周の時間スケール精度要求
観測データが1周に満たない場合、星の相対的間隔と衛星の回転速度の間に縮退が生
じ、そのデータだけからでは衛星の回転周期が決定できない(付録 D)。以上の問題を回
避するためには少なくとも同じ星を1周回ってもう1度見る必要がある。同じ星を観測す
れば衛星が 360◦ 回った事が解るので同じ星を2度以上観測する事が重要である。あらゆ
6.2 熱構造体(構体系、熱制御系など)
133
る方向で2度星を観測できればさらに良いので2周がまとまったデータとして扱える基準
となる。そこで、ここでは自転2周分のデータを取る際の精度要求を考える。
得られたデータから星の座標、衛星の姿勢を解析により同時に解く事になる。ここで求
まる星の座標、衛星の姿勢の精度はベーシックアングルの誤差が直接的に反映する。ベー
シックアングルが一定の場合、もしくはどう変動するかが解っている場合解析により衛星
の姿勢と星の位置を解く事が可能であるが、もしベーシックアングルの変動周期が自転周
期の整数倍でありその変動の仕方が未知である場合、衛星の回転則と星の位置との縮退が
生じ解析からは両者を分離することができない(付録 D を参照)。そういった事からベー
シックアングルに関しては変動誤差が 10µas 以下である事を要求し、変動が出来るだけ起
らないよう創意工夫をするとともに、モニターにより監視もおこなう事とする。モニター
に関してはレーザー干渉計を用いる計画であるが具体的方法は今後の検討課題である。
6.2.3 観測年数、回数によるパラメータ見積もり精度依存性
理想的に言えば位置決定精度は蓄えられたフォトン数で決まる。言い換えれば 1 つの
ターゲットの観測回数により位置決定精度が決まるが、現実問題としてはその観測される
時間の分布状況によって、理想的な精度が達成できなくなる。あるターゲットに関して、
ミッション期間中絶えず観測が行われていると理想的な精度が達成されやすいが、観測時
期が短い期間に集中して他の時期にはまったく観測されなかったりすると理想的な精度は
得られない。そこで我々は数値シミュレーションを行いどのくらいの期間にわたりどのく
らいの観測点があればよいのかを見積もった(§7.5.3 参照)。その結果によれば、観測年
数としては 2 年以上あり、観測グループ(年周運動や固有運動が測定できるような数ヶ月
といった時間スケールに比べて十分に短い時間に観測された点の集団)が 8 グループ以上
あれば、理想的な位置決定精度が得られる。従って 2 年以上の観測があり 8 グループ以上
観測される事を要求する。
6.2.4 その他、要求精度
• 絶対的姿勢精度
絶対的姿勢精度に関しては高い精度を必要とはしていない。正確な衛星の姿勢は後か
ら解析の段階で星の座標と同時に求まる事になる。観測をおこなおうとする天体が検
出器に入れば充分である。従って、1検出器が占める実視野の角度程度の精度があれ
ばよいという事で要求精度は α = 0.05◦ となる。
• スピン軸精度
衛星の自転に同期させ TDI スキャンして星の位置の測定をおこなう。従って検出器
134
第 6 章 衛星システム
望遠鏡上部
ビーム混合鏡
主鏡部
架台部
電源系、通信系部
遮蔽板及び、太陽電池パネル部
表 6.5: JASMINE 要素
のスキャン方向の画素の列から、大きくずれるようでは観測の精度に影響する。そこ
でピクセルの列よりはみ出さずに星が移動できる様にするためには 1 検出器を通過す
る間に1ピクセル以上ずれないのが望ましい。スキャン方向に画素数 4K ある検出器
を用いるので要求精度は 1/4K ∼ 50 である。
6.2.5 熱構造解析
JASMINE は光学系を中心とするミッション部を太陽からの輻射による厳しい熱環境か
ら守る必要がある。そこで、ミッション部が十分に覆える程度に大きく開いた遮蔽板兼、
太陽電池パドルで常に太陽の影になるように衛星を姿勢制御し、太陽の熱から守る構造
をとっている。また電源系、通信系などからなるバス部は太陽輻射のあたる側に配置され
る。以上からなる JASMINE 構体系の熱変動の許容範囲を考察する。熱構造解析は光学
系、バス部、遮蔽板、などの各要素をジョイントでつなぎ、ある角度から太陽による熱輻
射があるとして、熱の流れなどの解析行う予定である。
JASMINE に必要な要求精度を与えられた熱環境の中で達成しうるか考えたい。JASMINE は L2 ポイントに行く計画であるので地球、太陽の方向は一致する。ゆえに熱
源は太陽のみを考えればよい。その太陽輻射がどういった方向よりくるかを考える。
JASMINE は銀河面サーベイをサーベイするが、太陽の通る黄道面とおよそ 60 度傾いて
おり、さらに銀河面より 45 度程度以上離れているときのみ観測するとしているので、太
陽は JASMINE の回転軸から 30 度∼45 度の範囲に存在する。また、JASMINE はおよ
そ 4 時間で 1 回転する。そこで、考察が簡単な一定方向よりくる輻射による熱構造解析
に加え、回転軸と 30 度∼45 度のある角度を保ち、輻射が 4 時間で 1 回転する場合も考
える。
熱構造解析をするにあたり、JASMINE の衛星を以下の表 6.5 にしめす要素とそれらの
ジョイントよりなる集合体として捕らえ、考察を簡単化する (図 6.6 参照)。
6.2 熱構造体(構体系、熱制御系など)
135
図 6.5: 銀河面と黄道面との関係及び、衛星、地球、太陽の位置関係
以上の要素をジョイントでつないだものを
1. 一定方向よりくる輻射
2. 自転をさせ、輻射を与える場合
について考えたい。また、ジョイントのさせ方は一例であり、様々な場合についても考
察を行う。具体的解析については宇宙研、NASDA の方々に協力を得ながら進めていく予
定である。
6.2.6 basic angle の熱変動
すでに述べたように星の位置、衛星の姿勢精度を出すためにビーム混合鏡のベーシック
アングルの熱変動を可能な限りおさえる事が重要課題である。そのために、ビーム混合鏡
の熱の管理が重要である。この小節で、どのようにしてビーム混合鏡の熱環境を良くす
るかを述べ、更に熱変動によってどのようにベーシックアングルに影響を与えるかを考察
する。
ビーム混合鏡の熱的環境を出来るだけ単純にし、熱の出入りから出来るだけ守るため、
混合鏡支持部分を最小限にする計画である。ただ、強度的には問題があるので衛星打ち上
136
第 6 章 衛星システム
図 6.6: 熱構造解析のための要素配置図
げ時には振動に耐えるよう打ち上げ時のみ機能するミラー支持機構を設け、観測を行うと
きにはミラー支持をはずし、最小限の支持にとどめる。このようにし、衛星の他の部分と
の接触を可能な限り断ち、熱の流れを最小限にとどめ且つ単純化する。
次に、鏡面の温度ムラに対してどのようにベーシックアングルが変動するかを考える。
鏡面方向の変動は、鏡面の場所ごとの温度ムラにより厚みが変化する事によって鏡面方向
が変動する効果と、鏡の上面、下面の温度ムラによって反りが発生する事で鏡面方向の変
動する効果がある。鏡面の場所ごとの温度ムラは厚み方向の温度ムラに比べて大きい事を
考慮して、同程度である事が確かめられる。従って厚みの変動による鏡面方向の変動で典
型的な鏡面方向の変動を取り扱う事が出来る。以上の事を考慮すると、最終的には前小節
で述べたように全体で総合的に熱解析を行うことが必要であるが、第0次的な議論は以下
で見積もられる式による議論でも可能である。鏡面の方向の変化 ∆θ はおよそ、次のよう
に表される。
∆θ =
D
η∆T
L
(6.5)
ここで、D、 L はそれぞれビーム混合鏡の厚みと典型的長さを表す。η は膨張係数、∆T
は温度変化を表す。この関係式の正当性は数値実験でも確かめられる。
6.3 衛星姿勢と軌道
137
図 6.7: サーベイ方法の図
これによれば、例えば鏡の材質を SiC とすれば、およそ 10−3 [K] 以内の温度変化にお
さえれば鏡面方向変動、すなわちベーシックアングル変動は 10µas 以下に抑えることが
可能である。10−3 [K] 程度の温度変化に抑える制御が可能かどうかは今後の検討課題で
ある。
6.3 衛星姿勢と軌道
JASMINE は銀河面およびバルジのサーベイを目標としているが、具体的には銀河面を
含め、銀緯± 3.5◦ 、すなわち、360 × 7 度をサーベイする。サーベイする銀河面は黄道面
とおよそ 60 度の角度で交わっているため、夏と冬の年 2 回太陽は銀河面を通過すること
となる。そこで、太陽が通過する前後、太陽が銀緯± 45 °以内に入る時には銀河面サー
ベイを一時中断し、その間太陽を含まない大円サーベイに切り替える計画である。銀河面
サーベイに関して、銀緯± 3.5 度の幅をサーベイするため、衛星の回転軸を銀極に対して
3.5 度傾け、回転軸の歳差運動をさせる。自転周期は z‐band 仕様では 3.7 時間、K-band
138
第 6 章 衛星システム
仕様では 5 時間であり、自転 1 回転する間に視野直径の 4 分の 1 程度ずつ視野がずれる
ように歳差運動させる。すなわち、4 周程度の間は同じ星を観測できるように歳差運動を
させる。以上の条件より、歳差運動はおよそ z‐band 仕様で 30 日、K-band 仕様で 40 日
程度にする予定である。
6.3.1 他のプロジェクトとの相違点
GAIA などの他のプロジェクトはすべて全天サーベイを目指している。一見全天サーベ
イに比べて銀河面サーベイの方が単純で簡単と考えるかもしれないが、一般に全天サーベ
イは衛星のスピン軸と太陽のなす角度を一定に保ちながら自転させる。また、太陽の方
向の周りにスピン軸を歳差運動させる。すると衛星の太陽の周りの公転のため、歳差運
動の軸となる太陽方向が変化する効果と相まって、自然に全天サーベイが達成される。こ
の場合、2 つの利点がある。すなわち、太陽の方向と一定の角度をなして歳差運動させる
事により、太陽方向と衛星回転軸の位置関係が変化せず、熱的に安定した環境が達成され
る。また、太陽からの熱輻射を利用して、自然な歳差運動が達成される。しかしながら、
JASMINE は以上に述べた、熱的安定と自然な歳差運動という全天サーベイによる 2 次
的な恩恵を得る事が出来ない。我々は銀河面サーベイをするが、銀河面は黄道面に対して
60 度傾いており、銀緯± 45 以上に太陽が存在する時のみ観測する事を考慮すると衛星の
スピン軸に対して太陽は 30 度から 45 °の範囲を変化する事になる。この分全天サーベイ
に比べて熱環境的には厳しくなる。また、太陽の輻射を利用した自然な歳差運動が達成さ
れないので、衛星自身の推力で歳差運動を実現する必要がある。熱環境に関しては今後、
熱構造解析で、詳しく調べる予定である。ただこのような衛星の運動に関しては専門家の
方々との検討により、チャレンジングではあるが実現可能とのことでより具体的な検討を
進めている。
6.4 通信、電力、重量
6.4.1 通信量について
通信系については、JASMINE からの通信量や衛星の軌道にも大きく依存する。先ず、
JASMINE でのデータ通信量について以下で概算してみる。
(1)z-band の場合
先ず、z-band で観測した場合の仕様でデータ通信量を考えてみる。付録 A の式 A.16
に示されているように、検出器一個あたりの積分時間 t は、約 1.96 秒である。
そして、アストロメトリ用の有効視野 Ω は、
Ω = 2.3 × 10−1 ✷◦
6.4 通信、電力、重量
139
であり、期待される星の平均個数密度 Ns は、銀河系モデル(4.3 節)を使った計算結果
によると、限界等級(z≤18mag)までの個数密度は、
Ns = 70000 個/deg2
であるので、視野内で平均的に
Ns Ω = 1.6 × 104 個
の星が観測される。これらの個数の星が、t = 1.96 秒毎に出力されてくるので、単位時間
あたりに出力される星の個数 R は、
R=
Ns Ω
= 8.2 × 103
t
となる。比較的暗い1つの星に対しては、スキャン方向の 1 次元的データのみを出力する
ので、5pixels 毎のフォトンを出力する。1つの pixel 当たり、19bit を必要とするので、
1つの星当たりに必要な bit 数は、5 × 19bit となる。
以上より、単位時間当たりに出力されるデータの bit 数は、次のようになる。
5 × 19 × R= 5 × 19 × 8.2 × 103
(6.6)
= 7.8 × 10
= 780kbit/s
5
∼ 0.78Mbps
星の個数密度は、最大の場合は、180 万個/deg2 となる。この場合の、データ量は、
20Mbps となる。ただし、衛星が1回転する 3.7 時間のうちの 0.5 時間程度以下であるの
で、その間、stock し、通信量は平均的にする工夫が可能かもしれない。
明るい星に対しては、銀緯方向の位置決定精度を上げるため、1 つの星の 2 次元的情報
の出力が必要となる。この場合、各星毎に 5 × 9 = 45pixel 毎のフォトン数を出力する。
例えば、z≤14mag の場合に 2 次元的データの出力を行うとしても、上記のデータ量はほ
とんど変わらない。
(2)K-band の場合
次に、K-band の場合も、z-band の時と全く同様に計算しておく。
付録 A の式 A.39 に示されているように、検出器一個あたりの積分時間 t は、約 3.22
秒である。つまり、1つの星の位置情報が、3.22 秒ずつに出力されてくる。
さて、アストロメトリ用の有効視野 Ω は、
Ω = 1.7 × 10−1 ✷◦
であり、期待される星の平均個数密度 Ns は、銀河系モデル(4.3 節)を使った計算結果
によると、K≤16mag までの個数密度は、
Ns = 120000 個/deg2
140
第 6 章 衛星システム
であるので、視野内で平均的に
Ns Ω = 2.0 × 104 個
の星が観測される。これらの個数の星が、t = 3.22 秒毎に出力されてくるので、単位時間
あたりに出力される星の個数 R は、
R=
Ns Ω
= 6.3 × 103
t
となる。比較的暗い1つの星に対しては、スキャン方向の 1 次元的データのみを出力する
ので、9pixels 毎のフォトンを出力する。1つの pixel 当たり、19bit を必要とするので、
1つの星当たりに必要な bit 数は、9 × 19bit となる。
以上より、単位時間当たりに出力されるデータの bit 数は、次のようになる。
9 × 19 × R= 9 × 19 × 6.3 × 103
= 1.1 × 10
(6.7)
6
= 1100kbit/s
∼ 1.1Mbps
ところで、星の平均個数密度は、Ns = 120000 個/deg2 であるが、観測場所によって違
いがあり、最大の場合は、230 万個/deg2 となる。この場合の、データ量は、21Mbps と
なることは注意すべきである。ただし、衛星が1回転する 5 時間のうちの 0.7 時間程度以
下であるので、その間、stock し、通信量は平均的にする工夫が可能かもしれない。
明るい星に対しては、銀緯方向の位置決定精度を上げるため、1 つの星の 2 次元的情報
の出力が必要となる。この場合、各星毎に 9 × 17 = 153pixel 毎のフォトン数を出力する。
例えば、K≤12mag の場合に 2 次元的データの出力を行うとしても、上記のデータ量はほ
とんど変わらない。
6.4.2 通信アンテナについて
さて、通信に関しては、衛星の軌道が大きく関係する。JASMINE は L2 ポイントが有
力候補であるが、L2 からの場合で、上記のような通信量を送る場合、かなり指向性が良
く電送が効率が良いものが必要である。L2 では、リサージュ軌道とハロー軌道の2種類
がある。リサージュ軌道は、L2 ポイントの周り、約 40 万 km 以内に収まる軌道であり、
地球の方向があまり変化はしない。しかし、地球による太陽の食が起こりうるため、その
食を防ぐことが必要である。ミッションの最初から最後まで食が起こらない軌道を選ぶこ
とも可能であるが、軌道投入に際しての制限が強いと思われる。また、地球の方向と太陽
の方向が近いため、地球とのデータ通信の際に、太陽擾乱の影響を受ける可能性がある。
6.4 通信、電力、重量
141
一方、ハロー軌道の場合は、L2 ポイントからある方向には 65 万 km 以上離れた場所を
回る軌道である。食が起こる可能性はないが、地球の向きが大きく変わるため、アンテナ
の向きをそれに合わせて変える必要がある。しかし、それを機械的に行えば、その反動と
して衛星の姿勢変動に影響を及ぼす。高精度な位置測定のため、安定性が重要なのでこの
ような影響は極力避けたい。そこで、機械的ではなく、電気的にアンテナの方向を変える
フェーズドアレーアンテナが望ましいかもしれない。フェーズドアレーアンテナでは、横
に並べたアレーから出る電波の位相を調整することで指向性を与えるものである。いずれ
にせよ、軌道とともにアンテナ、通信方法について検討を続けていく予定である。
なお、採択する仕様によって、通信量は異なるので、まだ確定できないが、通信量の大
まかな評価を考慮すると、JASMINE の通信アンテナの口径は、60cm∼1m 程度である
と評価される。
6.4.3 電力について
太陽電池パドルは、太陽シールドの太陽が当たる側面に取り付ける。JASMINE で必
要な電力、それに伴い必要なパドルに関しての詳細は検討中であるが、大まかには次の
ようになると予想されている。先ず、バス部に関しては、トータルで 500W 程度とな
る。また、ミッション部も同程度で、合計 1KW 程度と予想している(検出器関係では、
200W 程度が目安(目標)である)。この場合だと、セルサイズを 40mm×60mm の高感
度 Multi-Junction セルを使うとしたら、1.2m×1.2m の面積で 1500 枚程度必要と見込ん
でいる。
6.4.4 重量について
JASMINE の軌道は、L2 ポイントが有力候補であるが、L2 まで打ち上げ可能な重量
は、M-V ロケットの場合は、約 0.5 トン、H-IIA の dual launch の場合は、約 1.2 トンで
ある。従って、JASMINE は、このような重量制限のもと、衛星システム全体の重量を検
討していかなくてはいけない。
143
第7章
位置天文情報の精度評価
この章の目次
7.1
7.2
精度評価 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
星像中心決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
. . . . . . . . . . . . . . .
CCD を用いた星像中心決定実験 . . . . . . . . . . . . .
解析結果 . . . . . . . . . . . . . . . . . . . . . . . . . .
3 次補正 . . . . . . . . . . . . . . . . . . . . . . . . . .
画素内感度ムラ補正 . . . . . . . . . . . . . . . . . . . .
焦点面歪曲補正 . . . . . . . . . . . . . . . . . . . . . .
結論 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TDI モードにおける解析 . . . . . . . . . . . . . . . . .
ビーム混合鏡と Basic Angle について . . . . . . . . . . . .
7.3.1 大角度離れた 2 方向を同時に観測する必要性 . . . . . . .
7.3.2 大角度離れた 2 方向のなす角(Basic Angle γ )について .
相対論的補正 . . . . . . . . . . . . . . . . . . . . . . . . . .
アストロメトリーパラメータの精度 . . . . . . . . . . . . . . .
7.5.1 銀緯方向の精度の見積もり . . . . . . . . . . . . . . . . .
7.5.2 観測精度の銀緯依存性 . . . . . . . . . . . . . . . . . . .
7.5.3 観測年数、回数によるパラメータ見積もり精度依存性 . . .
連星系の問題 . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.1
7.2.2
7.2.3
7.2.4
7.2.5
7.2.6
7.2.7
7.2.8
7.3
7.4
7.5
7.6
星像中心決定のアルゴリズム
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
146
148
149
150
151
152
153
153
155
155
155
161
163
163
165
167
168
7.1 精度評価
衛星システム全体(望遠鏡、検出器、軌道、姿勢制御、熱構造、サーベイ方法など)の
仕様を仮定した場合、最終的にはどれぐらいの精度がでるものなのか、また逆に目標精度
を達成するためには、衛星のどこの仕様にどれぐらいの要求が必要なのか、という誤差評
価が重要である。年周視差など位置天文情報は、§4.1 で簡単に説明した手順に従い求めて
144
第7章
位置天文情報の精度評価
図 7.1: 精度の評価
いく。その過程においては、様々な誤差要因が入り込む恐れがある。そのため、衛星シス
テムの各部位から最終精度にどれぐらいの誤差が入り込むかという error budget の検討
が必要かつ重要である。最終的な精度評価とシステム全体とのおおよその関わりを示した
のが、図 7.1 である。
先ず、JASMINE の技術的な仕様が決まるとすれば、光学系や検出器等の特性が決ま
る。すると、星のフラックスが装置に入ったときに、どれだけ実際のフォトンが検出され
るかが分かる。そのフォトン数が分かれば、準解析的な評価を使うとすぐに1回の検出器
√
当たりの星像中心の決定精度が評価される。準解析的評価とは、例えば σ ∼ λ/D N を
用いることに対応する。しかし、実際は、このように単純なものではない。光学系では、
光学波面の誤差があり、それによって星像の形 (Point Spread Function)の変形が起こ
る。それをもとにした星像を考慮する必要がある。さらに、検出器の読み出しに関わるノ
イズが星像に加味される。こうやって生じるノイズ入りの星像をもとに実際、どのように
星像中心を決めるのかの精度評価が必要である。さらに、サーベイ方法や、観測回数によ
り最終的なアストロメトリ情報(アストロメトリーパラメーター)の精度が理想的に決ま
るが、観測装置の時間変動などによる変動の効果も加味して考えなくてはいけない。さら
に、検出のアルゴリズムから決まる限界等級を考慮し、現実の複雑星(連星や惑星をもつ
恒星など)をどう扱うか、そして、銀河系のモデルをもとに、実際にはどのような星に対
して、どれぐらいの精度が出るのかを評価しなくてはいけない。以上のことを評価し、最
7.2 星像中心決定
終的な精度を評価することによって、どれぐらいのサイエンスの結果が出せるのかという
ことが評価できる。以上のようにして、どの部分が最終的な精度にどのように影響を及ぼ
すのか、error budget の見積もりが重要な検討課題である。また、評価により、目標の精
度評価が達成できていればいいが、そうでなければ、どこの部分をどの様に改良すべきか
検討しなくてはいけない。
以上の精度評価は、§9 で記述するような JASMINE シミュレータを用いて数値実験
を行っていくとともに、可能な箇所は地上での実験によりテストをして行く予定である
(実際、以下で述べるように星像中心決定に関しては実際の CCD を用いた実験を行って
いる)。
さて、この精度評価のうちで、1回の観測で星像中心を実際にどれぐらい精度よく測
定できるのかという箇所が重要なポイントの1つとなる。そこで、先ずは地上で人工的
な光で星像を作成し、実際の CCD を用いて、星像中心を決定する実験を月面天測望遠鏡
(ILOM) チームと協力して行っている。また、星像中心を求める解析方法(重心法を独自
に改良したもの)は、数値シミュレーションをもとに開発済みである。JASMINE の場合
は、10µas を出す場合は、K-band の場合、1 画素の約 1/250、4µas の場合は、約 1/600
の精度達成が必要である。現段階では TDI なしの状況で、約 1/300 の分散精度を達成し
ている。今後さらなる高精度達成と TDI モードを用いたり、星の色を考慮した、より実
際の仕様に近い状況での実験を進める予定である。以上に関しては次の節で詳細を記述す
る。また、太陽系内を星からの光が通過する際に受ける相対論効果である重力レンズ効
果を考慮する補正も今後の高精度位置測定では重要であり、以下で詳細を記述する。さら
に、最後の節では、サーベイ方法と最終的なアストロメトリーパラメータの精度に関して
説明をしておく。
7.2 星像中心決定
星像中心決定は JASMINE 計画の最重要事項の一つである。この星像中心の解析の良
し悪しが、そのまま JASMINE の精度に影響する。JASMINE では星の位置決定精度を
z = 15.5mag、もしくは K = 12mag で 10µas と定めているので、この 10µas を達成す
るために、z-band 仕様では 1 検出器、1 回の観測あたり 1 画素のおよそ 70 分の1の精度
が必要となり、K-band 仕様ではおよそ 150 分の 1 の精度が必要となる。また、明るい星
に関して言えば、300 分の 1 画素ないし、500 分の1画素以上の精度を出す事が原理的に
可能となるため、そういった精度が解析から出せるのかどうかが重要課題となる。ここで
は JASMINE 計画で用いるために開発したアルゴリズムを紹介し、実際に用いた実験装
置とそのアルゴリズムを用いて実験の解析をおこなった結果を示す。
145
146
第7章
位置天文情報の精度評価
7.2.1 星像中心決定のアルゴリズム
ここで用いているアルゴリズムは検出器に貯められた星からのフォトンの重心を利用し
て求める方法(重心法)を基本としている。その理由は重心を求める事が容易であり、膨
大な観測データを解析する際に有利である事、星の形、すなわち PSF の形をあらかじめ
仮定しなくて良い事が挙げられる。ただし、PSF の形を仮定しないとはいえ、以下で述
べる最小 2 乗法によるパラメータフィッティングの際、パラメータ k を通じて陰に PSF
の形が与えられる。
この手法のポイントは観測される星たちが短い時間(具体的には、衛星が自転する数時
間という時間スケール)では相対的位置関係を変えないが、測定される画素の場所によ
り、重心間距離が変化する。この変化を逆に解析の際に利用し、真の星の中心を求めると
いう手法である。
具体的な手法としては以下のとおりである。
• 2 つの星をピックアップ
• 2 つの星について星の重心を含むピクセルを中心に 5 × 5 ピクセル取り出し重心を求
める。
星のイメージにおける最頻値を中心として上下左右に 2 ピクセル数だけとり、領域を定
める。すなわち、取り出された領域の一辺のピクセル数は 5 で、奇数となる。以降、星像
中心を決定するのはこの決められた領域内の情報のみを取り扱う。photon の重心は次式
で定める。
xc
yc
Aij i
i
j
i
j Aij j
j Aij
1
= i
ここで、ピクセルの場所 (i,j) でのフォトン数 Aij とする。
この式で与えられた重心(xc , yc ) は真の値 (xa , ya ) とはずれている。そこで、
●真の中心と重心のずれ(誤差)は重心のピクセル中心からのずれ(重心の座標 Xc)
に比例するとした1次の補正を行う(比例係数k)。
誤差 Xa − Xc =k× Xc (Xa : 真の中心座標)
以上を仮定し、多くの観測データを得た後、
●多くの測定点を満たすパラメータkを最小 2 乗法により求める。
以上の手順に従って解析することで真の星像中心を見積もる事が出来る。
この章では、上で述べたアルゴリズムに用いられた計算の具体的な式を示しておく。
7.2 星像中心決定
147
星1、星2についてそれぞれ真の位置 xa1 xa2 は
xa1 = xc1 + k1xc1
(7.1)
xa2 = xc2 + k2xc2
(7.2)
I = 0(Xc2 > Xc1)
I = 1(Xc1 < Xc2)
(7.3)
(7.4)
関数 I を次式で定義
相対的距離 |δxa | は
|δxa | = xa2 − xa1 + I
= xc2 − xc1 + k2xc2 − k1xc1 + I
= (1 + k2)(xc2 − xc1 ) + (k2 − k1)xc1 + I
≡ α∆ + βxc1 + I
(7.5)
(7.6)
(7.7)
(7.8)
ここで α = (1 + k2)、β = (k2 − k1)、γ = −|δxa |、∆ = (xc2 − xc1 ) である。
この式を出来るだけ満足するようにパラメータ k1, k2 を求めたい。すなわち、最
小 2 乗法を用いる。
S=
(α∆ + βxc1 + γ + I)2
(7.9)
を定義すれば、これをパラメータで微分したものは 0、すなわち、
∂S
= 0,
∂β
∂S
= 0,
∂α
∂S
=0
∂γ
(7.10)
となる。従って、以下の 3 式を満たす事になる。
∂S
=α
∆2 + β
∆xc1 + γ
∆+
∆I = 0
∂α
∂S
=α
∆xc1 + β
x2c1 + γ
xc1 +
xc1 I = 0
∂β
∂S
=α
∆+β
xc1 + γ
1+
I=0
∂γ
以上を行列表示すると次のようになる。
2
∆
∆x
c1
∆
∆xc1
2
xc1
xc1
∆I
α
∆
x
xc1 β = −
c1 I
γ
I
1
この行列をパラメータについて解く。
2
α
∆
β = −
∆x
c1
∆
γ
∆xc1
2
xc1
xc1
−1
∆
∆I
xc1
x
c1 I
1
I
以上の式により得られたパラメータより真の中心値 xa1 , xa2 が得られる。
(7.11)
(7.12)
(7.13)
148
第7章
位置天文情報の精度評価
図 7.2: 実験装置
7.2.2 CCD を用いた星像中心決定実験
星像中心の高精度位置決定は JASMINE 計画でのアストロメトリ観測に必要かつ重要
な技術である。JASMINE では 10 万分の 1 秒角の精度での星の位置決定を目標としてい
る。この時、z-band 仕様では一検出器一回あたり、およそ 1/70 ピクセル程度の精度を必
要とする。また、明るい星に関して言えば、1/300 から 1/500 ピクセル程度の精度が原理
的には出せる事になっている。相対的位置は変わらない2つの擬似星像の重心間距離を測
定する。重心は1ピクセルのどのような場所にあるかにより真の星の中心位置とずれが生
じる。従って重心間距離は測定されるピクセルの位置によって異なる。この測定されるピ
クセル位置と重心間距離の関係を調べることにより、高精度で星像中心を求める。
■実験装置 星像中心決定の実験を行うため、次のような実際の CCD を用いた実験を行
う。装置は長さ約1mの光学ベンチ上に、擬似星光源、集光レンズ、CCD カメラをこの
順に設置し、集光レンズによる擬似星光源の像を CCD 上に結像させる。擬似星は白色光
7.2 星像中心決定
149
図 7.3: 実験装置コンフィグレーション
または He-Ne レーザ光を、5 行 5 列に並べた断面 10 ミクロンの光ファイバー 25 本に導
き、端面を光らせて作っている。用いた CCD は 1024 × 1024 画素、で 1 画素 10µm で
ある。また、その CCD は光軸に垂直な方向に、1 ミクロン以下の精度で位置を調節し、
星像中心と CCD ピクセルの任意の相対位置関係を実現することができる。また、温度は
0 ℃に制御されている。集光レンズは口径 5 cm、F 値は 2∼4 だが、回折により像の大
きさを複数の CCD ピクセルにまたがるように調整するため、直径 2.5mm 程度の絞りを
入れる。また、実験で中心的に用いるのは F4 の光学系である。すなわち、絞りを入れた
状態で F80 の光学系となる。(実験場所:水沢観測センター)
以下結果を示す。
7.2.3 解析結果
様々な星1の場所での見積もられた 2 つの星の間の相対的距離をグラフにて示す(図
7.4)。横軸は2つの星のうち、一方(星1)の座標を表したものである。1画素のうち、
どこに重心があるかによって(横軸の値により)重心間距離(D) の値が大きく異なり、重
心間距離をそのまま相対的距離として測定すると数分の 1 画素クラスの精度しか得られな
い。一方、上述のアルゴリズムにより、一次補正をおこない相対的距離を見積もると、プ
ロット(E) をみて解るように、相対的距離の見積もった値は、1 画素の何処で測定しよう
150
第7章
位置天文情報の精度評価
図 7.4: 星1の座標に対する 2 つの星の見積もられた相対的距離
ともかなりの精度で、ほとんど同じ値をとる事が解る。相対的距離の拡大図を図 7.5 に示
しておく。さらに、各相対的距離測定値の分布図も図 7.6 に示しておく。この拡大したグ
ラフ(図 7.5) ないし、測定値分布図 (図 7.6) から解るように 2 つの星の相対的距離の誤
差はおよそ 300 分の 1 ピクセルの分散の範囲におさまっている。
また、1 次補正された部分の拡大図を次に示す。以上から、アルゴリズムにより 1 次補
正されると JASMINE に必要な精度、すなわち、1 検出器 1 回の観測につきおよそ 300
分の 1 画素という精度が達成される事が実験的に示された。
7.2.4 3 次補正
重心と真の中心とのずれを 1 画素の中心からのずれに比例するとした 1 次補正をする
のが、上述のアルゴリズムであった。しかし、この 1 次補正は数値シミュレーションに
よる解析の結果、一定の誤差を含む。従って、70 分の 1 画素の精度では問題とはならな
いが、500 分の 1 画素以上の精度を要求する場合には 1 次補正では充分ではなくなる。
7.2 星像中心決定
151
図 7.5: 星1の座標に対する 2 つの星の見積もられた相対的距離の拡大図
JASMINE では z = 15.5mag もしくは K = 12mag で 10µas の精度を目指しているので
この目標精度では 1 検出器 1 回の観測についておよそ 100 分の 1 画素の精度が達成され
れば良いので 3 次補正は問題とはならないが、目標の星より明るい星に対してはさらに
高精度を狙えるので、その場合 3 次補正が必然的となる。3 次補正をおこなえばシステマ
ティックなエラーは 1000 分の 1 画素より充分に小さなものになることが数値シミュレー
ションにより確かめられている。従って、JASMINE 計画では 5 次の補正は必要とはなら
ない。
7.2.5 画素内感度ムラ補正
500 分の 1 画素以上の高精度を必要とする場合、以上で述べたように 3 次補正が必要と
なることを示した。また、このような 500 分の 1 画素というような精度となってくると、
3 次補正の必要性のほか 1 画素内の感度ムラというのも影響する可能性が出てくる。こ
の感度ムラは検出器の場所に依らず、同じように存在したり、検出器の場所の関数として
152
第7章
位置天文情報の精度評価
図 7.6: 相対的距離測定値の分布
ある種の法則性をもつ場合には解析の段階で取り除く事が出来る。実際、数値シミュレー
ションにより、画素内に現実にはありえない程の感度ムラを与えても、感度ムラに法則性
がある場合には取り除く事が出来る事を示している。ただ、この感度ムラがまったくラン
ダムに存在する場合、解析による補正が出来なくなりその検出器の性能の限界という事に
なる。
7.2.6 焦点面歪曲補正
検出器上での星どうしの相対的距離を高精度に求める事に成功しているが、最終的に意
味のある相対的距離にするためには焦点面上の歪曲補正を行うことが必要である。すなわ
ち、検出器上での 2 つの星の相対的距離はあくまで、像の相対的距離であり真の相対的距
離とは異なっている。この像の歪曲による補正を行う必要があるが、やはりこれもすでに
述べたアルゴリズムとまったく同様に、1 次補正ないし、3 次補正を行うことにより誤差
を取り除く解析を行う予定である。これは検出器の大域的な歪みの補正も兼ねており、ま
7.2 星像中心決定
153
とめて補正される事になる。この歪曲補正により、最終的データが完成する。
7.2.7 結論
現段階で CCD 検出器による星像中心決定実験において、300 分の 1 ピクセル程度の精
度が達成された。今回の実験ではポアソンノイズにより、理想的にいって、300∼350 分
の 1 ピクセルが限界であるのでかなり良い結果が得られている。またこれは JASMINE
計画を遂行するにたる精度である。今後は 500 分の 1 画素以上の精度を要求する際には 1
次補正だけでは不十分であり 3 次補正が必要であり、さらにはやはり、同じく 500 分の 1
画素以上の精度では 1 画素内の感度ムラによる影響もうける可能性がある。また今後は
焦点面歪曲補正も含めて最終的に何処までの精度が得られるかの実験をおこなう予定で
ある。
7.2.8 TDI モードにおける解析
TDI モードにおいては1検出器上を星が通過するレートに合わせ electron を転送し1
検出器を通過し終わったところで初めて読み込みをおこなう。従ってデータとしては 1 つ
のターゲットに対しては1検出器1回通過で一回分のデータを得ることになる。我々のア
ルゴリズムでは星の相対的位置関係を決定するために一つの星に対して複数回の観測デー
タが必要である。焦点面にはスキャン方向に例えば z-band 仕様で9検出器並んでいるの
でその9つのデータを用いることも可能である。しかし、検出器ごとの特性が異なってい
るような場合には解析は困難となる恐れもある。しかし JASMINE の仕様では、星が年
周運動や固有運動する時間スケールに比べて充分に短い時間に1つの星に対して、2台の
望遠鏡がそれぞれ4回ずつ合計8回の観測データが集められる。そこで上で用いていた解
析アルゴリズムがそのまま適用できるようになる。
TDI モード CCD の性能評価
JASMINE 計画では、TDI モードの CCD を利用することが必要である。そのため、
centroid 実験においても TDI モードの利用可能な CCD を用いて、星像中心の決定精度
を評価しておく必要がある。
今回実験に使用した CCD カメラは、Starlight Express 社 の HX916 という CCD カ
メラである。搭載 CCD の仕様は表 7.1 に示す通りである。廉価な CCD で、TDI が使用
できて、well の深さが 10 万以上のものは無いので、今回は評価のために、binned モード
で 10 万電子を実現できる CCD を利用する。
154
第7章
pixel size
number of pixels
CCD size
位置天文情報の精度評価
6.7µm × 6.7µm
1300 × 1030
8.71 mm × 6.9 mm
well capacity
30,000e−
(2x2 binned mode)
120,000e−
表 7.1: CCD カメラ HX916 に搭載されている SONY 製 ICX085AL の仕様。
pixel size
number of pixels
CCD size
22.5µm × 22.5µm
1242 × 1152
27.9 mm × 25.9 mm
well capacity
440,000e−
read out noise
6e−
表 7.2: 国立天文台研究推進経費による冷却 CCD システムに搭載されている CCD、
EEV 社製品 CCD 55-30 のスペック
コントローラ部は、USB によりパーソナルコンピューターと接続されるようになって
おり、Windows に対応したソフトウエアは添付されている。しかし、このソフトウエア
は星の追跡には赤道儀などのガイドを利用する仕様になっており、固定された望遠鏡で直
接 CCD を TDI モードで駆動する機能は用意されていない。
そのため、TDI 操作用のソフトウエアを用意する必要がある。これは、David Schmenk
氏がホームページで開発・公開している ccd-kernel を利用する。当初 CCD 実験を開始し
た時には、カーネルドライバーのバージョンは 1.5 で、HX916 に対応していなかったが、
David Schmenk 氏のご厚意で、開発中の 1.6 を提供していただいた∗1 。現在のカーネル
ドライバーの最新バージョンは、1.7 である。このコントローラは、初期化段階でホスト
側からデバイス側に必要なプログラムを転送する方式になっており、デバイス側に転送す
るプログラムは sdcc でコンパイルして作ることが出来るようになっている。
なお、現在国立天文台研究推進経費をいただいて、より実際のミッションに近い環境で
の TDI による星像中心決定精度向上のための実験の準備を進めている。使用する CCD
は窒素冷却できる真空容器に収められているもので、CCD は EEV 社製の well の大きな
ものである。冷却することにより read out noise を押えられるので、より高い星像中心決
定精度を得られることが期待される。現在これを用いた実験のための調整中である。
∗1
HX9 シリーズへの対応は、カリフォルニア大学サンタクルーズ校で天文学の大学院生である David
Whysong 氏 http://www.physics.ucsb.edu/~ dwhysong/ による。
7.3 ビーム混合鏡と Basic Angle について
7.3 ビーム混合鏡と Basic Angle について
7.3.1 大角度離れた 2 方向を同時に観測する必要性
JASMINE 計画は星の年周視差を求めることが最重要課題の一つである。年周視差は宇
宙に張られた座標、すなわちリファレンスフレーム上での年周運動を測定する必要がある
が実際にはリファレンスフレームは観測できない故、年周運動を求めるのは容易な事では
ない。我々は星々の相対的ずれから年周視差を割り出す必要がある。しかし同一方向の星
の年周運動は距離に応じて大きさは変わるものの位相及び形状はまったく同じなので縮退
が生じてうまく解く事が出来ない。そこでまず第一に考えられる手法は次のようなもので
ある。
QSO のような充分に遠い天体で不動点だとみなせるものを用いてレファレンスフレー
ムを与える方法である。しかし、この方法はフィールドに必ず不動点を必要とするが実際
には必ず存在するとは限らない。この場合不動点をもつフレームを基準として、異なる
フィールドは共通に検出されている星を手がかりにタイルの張り合わせの如くフレームを
つないで行く手法をとらざるを得ない。この方法は張り合わせるフィールドの数に応じて
誤差が蓄積する。そういうことからこの方法はグローバルなアストロメトリには不向きで
あるといえる。
そこで、新たに考えられる方法は同時に大角度離れた方向を観測する手法である。この
方法は上で述べた縮退の問題をみごとに解決してくれ、同時に観測された星の年周視差を
それぞれ縮退を起こす事なく求めることが出来る。更に重要な事に、大角度離れた同時観
測により衛星の各時刻の姿勢、すなわち衛星の回転則と星の位置に対する解が縮退するこ
となく解け、衛星の回転則と星の位置が解析により同時に決定される事になる。これに関
しては付録 D も参照されたい。ヒッパルコス衛星では大角度離れた 2 つの星を同時に観
測し、その相対的ずれから年周視差を割り出すことに成功しており、GAIA 計画も同様の
方法をとる。JASMINE 計画でも同様の方法をとる予定である。
7.3.2 大角度離れた 2 方向のなす角(Basic Angle γ )について
2 台の望遠鏡を大角度離して同時に観測する事が年周視差をはじめ様々なパラメータを
出すのに必要不可欠であるが、その 2 台の望遠鏡のなす角、すなわちベーシックアングル
γ はどのような値をとれば良いのかというのが問題となる。そのベーシックアングル γ は
以下の3つの観点から決める事とする。
1. 2 つ星の相対的運動から年周視差運動を分離するする場合縮退を最も起こしにくく
する観点から考えると γ = 90◦ がベストでありこの値に近ければ近いほど良い。ベーシッ
155
156
第7章
位置天文情報の精度評価
クアングルが 0◦ , 180◦ では 2 つの星の年周視差による運動の位相がそろい、縮退する。
すなわち年周視差分離できない。
2. 360◦ を小さな数で割って出来るような角度は避ける。例えば、γ = 120◦ と選んだ
場合、ある星はその星から 120◦ 離れた星と年周視差分離されるがその星はまた更に 120◦
離れた星と年周視差分離されその星の 120◦ 先にははじめの星がある。この場合3方向の
星だけで閉じて、他の星とは無関係に年周視差が求まる。そうすると、ある星に大きな誤
差が生じた場合、少数の閉じた星に大きく影響する。更に、データ解析の際には 2 台の望
遠鏡のデータから衛星の回転則を解く事になるが、アングルが小さな数で割り切れる角度
であると、その数を周期に持つ回転の振動モードに関して縮退を起こしとく事が出来なく
なる。以上の問題が出ないよう、また多くのデータを対等に扱う事が出来るよう出来るだ
け多くの星とリンクできるような角度を選ぶ。以上より、γ = 72◦ , 90◦ , 120◦ といった角
度は避ける。
3. 衛星の姿勢制御のためのスラスター噴射や宇宙デブリ衝突といったような、衛星の回
転則の連続性に影響を与える現象がない一連のデータは衛星数回転分である。上で述べた
ようにベーシックアングルだけ離れた星は互いに同時に観測されるので年周視差などの
アストロメトリーパラメータの導出の際には強くリンクしあっている。このリンクしあっ
ている星が銀河面の一部分に片寄ったりせず、出来るだけ銀河面を均一に埋めるようベー
シックアングルを選びたい(エルゴード的観測点分布)。例えば、γ = 120.01◦ とした場
合、確かに 360◦ を小さな数3で割ったものとは異なるが、1 回転した時には始めに観測
した領域とほんの僅かしかずれていない(この場合 0.03 度)ので、数回転したとしても、
観測領域は銀河面上のほとんど 3 方向に集中している。そのようなことがないような角度
を選びたい。
以上の3つからベーシックアングルを決定したい。そこで試みに、有限周回でアングル
が閉じる場合をデータの長さ別(2∼5 周)に調べた結果を表 7.3 および表 7.4 に示す。
以上をまとめて、n 周で適切なベーシックアングル γ は
γ=
360n
4n + k
(7.14)
ここで、k は −n < k < n を満たす整数。n は奇数が良く、|k|/n は 0 や 1 に近すぎない。
(途中で途切れて不均一となる事を避ける。)更に、n, k は約数を持たないほうが良い。
先ほど、2∼5 周の場合で具体例を示したが、よりエルゴード的にするため、周回数は
無限リミットを取りたい。具体的にどのようにアングルを定めればよいかを示す。
縮退を避けるため、360 °を小さな角度で割った値を選ばないようにベーシックアング
ルを定めたいので、まず、360 °を小さな角度で割った値はどのように分布するのかをあ
らわした図を示す。
7.3 ビーム混合鏡と Basic Angle について
157
●データ 2 周の時(720 °)
観測回数
アングル
コメント
4
180
×(1 周で閉じる)
5
144
△(90 °から遠い)
6
120
×(1 周で閉じる)
7
102.9
○
8
90
×(1 周で閉じる)
9
80
○
10
72
×(1 周で閉じる)
11
65.4
△(90 °から遠い)
12
60
×(1 周で閉じる)
●データ 3 周の時 (1080 °)
観測回数
アングル
コメント
9
120
×(1 周で閉じる)
10
108
○
11
98.2
○
12
90
×(1 周で閉じる)
13
83.1
○
14
77.1
○
15
72
×(1 周で閉じる)
表 7.3: ベーシックアングルに適する角度 (データ 2 周および 3 周)
すなわち、k/n(0 ≤ k ≤ n : k, n は整数)をあらゆる n についてプロットする。横
軸は角度をあらわし、縦軸には上でプロットされたモードの数、すなわち “縮退頻度” を
表している。
このグラフにおいて、大きい値を示す角度は縮退が多く発生する角度であるので、避け
るべき角度である。また、条件1より、0 度や 180 度に近い角度は避けるべきである。と
いうことから、360 °の 1/4(90 °)近くで角度を探したいが、その 1/4(90 °)も 1/3(120
°) も避けたい値である。この 1/4 と 1/3 の間で角度を探すとする。この 2 つの値 1/4 と
1/3 はできるだけ避けたいことからこの中間的値が望まれるが、そこには 1/4 と 1/3 で
の値ほどではないがまた、値の大きい角度 2/7(102.9 °)が存在する。そこで、今度は
1/4 と 2/7 の中間的値を探す。やはり同様にそこには 3/11(98.2 °)が存在する。そこで
更に 2/7 と 3/11 の中間的角度を求めるといった具合に以上の操作を無限に繰り返す。そ
158
第7章
位置天文情報の精度評価
●データ 4 周の時(1440 °)
観測回数
アングル(度)
コメント
12
120 ×(1 周で閉じる)
13
110.8
×(途中で途切れる場合、エルゴード的でない)
14
102.9
×(2 周で閉じる)
15
96 ×(途中で途切れる場合、エルゴード的でない)
16
90 ×(1 周で閉じる)
17
84.7
×(途中で途切れる場合、エルゴード的でない)
18
80 ×(2 周で閉じる)
19
75.8
×(途中で途切れる場合、エルゴード的でない)
20
72 ×(1 周で閉じる)
●データ 5 周の時(1800 °)
観測回数
アングル(度)
コメント
15
120 ×(1 周で閉じる)
16
112.5
×(途中で途切れる場合、エルゴード的でない)
17
106
○
18
100
○
19
94.7
×(途中で途切れる場合、エルゴード的でない)
20
90 ×(1 周で閉じる)
21
85.7
×(途中で途切れる場合、エルゴード的でない)
22
81.8
○
23
78.3
○
24
75 ×(途中で途切れる場合、エルゴード的でない)
25
72 ×(1 周で閉じる)
表 7.4: ベーシックアングルに適する角度 (データ 4 周および 5 周)
うするとある値に収束する事が確かめられる。以上で述べた角度をあらわす数列をも追う
一度列挙すると、
1 1 2 3 5 8 13
, , , , , , ,···
3 4 7 11 18 29 47
(7.15)
となる。この数列は一定の規則が存在する。すなわち、前 2 項の分母、分子それぞれの
和が次の項の分母、分子の各々の値になっている。更にこれらの各項は前述の表にある “
エルゴード的観測点分布” を示す角度に一致している。よって、この収束値をベーシック
7.3 ビーム混合鏡と Basic Angle について
159
図 7.7: 縮退モードの割合(値が大きい程、不適格)
アングルとして選ぶ事にする。
以上より、JASMINE ではベーシックアングルを 99.5 °と決定する。
<参考>
この数列が求める数列であることは、以下のように理解できる。今、二つの分数
k2
が既約で (条件 I)、
n2
k1
、
n1
k2 − 1
k1
k2
k1 + 1
≤
<
≤
n2
n1
n2
n1
を満たし (条件 II)、かつ ∀n < max(n1 , n2 ) で
k2
k1
k
< <
n1
n
n2
を満たす既約分数
k
が存在しない (条件 III) とする。この時、
n
k3
k1 + k2
=
n3
n1 + n2
(7.16)
(7.17)
160
第7章
位置天文情報の精度評価
は、式 (7.16) を満たす既約分数である。式 (7.17) が式 (7.16) を満たすことは条件 II よ
り簡単に分かる。これが既約分数であることは、条件 (III) が保証する。もし式 (7.17) が
式 (7.16) を満たす既約分数のうち n が最小のものであることが示されれば、
k3
k2
と
に
n3
n2
ついて条件 I から条件 III が満たされるので、順次この系列を追って行けば適切な極限値
が得られる。
この数列
an
の極限値を求めるには、以下のようにする。
bn
f0 = 0
f1 = 1
fn = fn−1 + fn−2
(7.18)
で表される数列、いわゆる Fibonacci 数列を用いると、一般に Fibonacci 数列と同じ漸
化式
an = an−1 + an−2
(7.19)
に従い初期二項の値が異なる数列は、この初期値と Fibonacci 数列を用いて
an = fn a1 + fn−1 a0
と表される。JASMINE の場合のこの数列の分子 an は a0 = 1, a1 = 1 の数列に、分母は
b0 = 3, b1 = 4 の数列になっている。
Fibonacci 数列の fn /fn−1 の n → ∞ 極限値を x とすると、この値は定義式 (7.18)
より
fn
fn−1
=1+
fn−2
fn−1
と表されるので、
x = 1 + 1/x
の正の解から
√
1+ 5
x=
2
と求められる。これを用いると、
an
fn a1 + fn−1 a0
=
bn
fn b1 + fn−1 b0
fn
a1 + a0
fn−1
=
fn
b1 + b0
fn−1
√
(1 + 5)a1 + 2a0
√
→
(1 + 5)b1 + 2b0
7.4 相対論的補正
161
JASMINE の場合の初期値を代入すれば、
√
(1 + 5) + 2
√
× 360◦ ∼ 0.276393 × 360◦ = 99.501553◦
(1 + 5)4 + 6
となる。なお、GAIA は同様に
a0 = 1, a1 = 1, b0 = 4, b1 = 3
an
× 360◦ → 0.295686 × 360◦ = 106.446960
bn
程度である。
一般に、式 (7.19) で表される数列は
1
an = √
5
√
√
√ n √ n 1− 5
1+ 5
1+ 5
1− 5
a0
a0
a1 −
− a1 −
2
2
2
2
で表されるので、これを直接使っても良い。
7.4 相対論的補正
良く知られている通り、一般相対性理論は、重力による「光線の軌道の湾曲」や、「時
間の遅れ」を含んでいる。フェルマーの定理から、時間と光の曲がりは表裏一体である。
実際、干渉計での観測自体、シグナル間の到着時間の差によって、像の方向を決定してい
る。よって、以下では、光の曲がりの用語のみ使って説明する。
太陽重力による光の曲がり角は、太陽表面を光がかすめる場合に最大となりおよそ 2 秒
である。よって、通常、太陽方向以外の観測では無視することができた。しかし、その曲
がり角は、地球の位置でさえミリ秒の大きさなので、高精度アストロメトリでは 常に 相
対論的補正が必要である。
必要な精度
一般相対論を太陽系のような弱重力場系に適用する場合の有力な方法は、ポスト・
ニュートン近似を用いる事である。つまり、系の質量を M 、大きさを R、光速度を c、重
力定数を G で表すと、GM/c2 R 1 である事を利用して、逐次近似するものである。
ポスト・ニュートン近似の観点で、すでに太陽による重力レンズ効果は詳しく調べられ
ている ([Epstein and Shapiro, 1980])。通常の質量の 1 次の効果は、2 秒角、つまり、約
10−5 のオーダーなので、質量の 2 次の補正 (2 次のポスト・ニュートン近似) は数マイク
ロ秒の大きさになる。しかし、この効果は距離の 2 乗に反比例するので、太陽の方向を観
測しない JASMINE 計画では無視出来る。数マイクロ秒の精度では、太陽の四重極モー
162
第7章
位置天文情報の精度評価
メントによる光の曲がり角への補正も考察した方が安全である。実際には、その補正は
太陽表面で最大約 1 マイクロ秒で距離の 3 乗に反比例するので、JASMINE 計画では無
視できる。この他に、回転する物体のまわりでは、慣性系の引きずりが起こる。これは
Lense-Thirring 効果として知られ、太陽によるその効果は、四重極と同様に、太陽表面
で最大で約 1 マイクロ秒で距離の 3 乗に反比例するので、JASMINE 計画では無視して
よい。
次に、惑星の重力を考える。太陽系で最大の惑星である木星は、その表面付近をかすめ
る光に対して、1 ミリ秒オーダーの曲がり角を与える。2 番目に重い土星も 100 マイクロ
秒オーダーの効果を生み出す。よって、太陽系 (太陽+惑星) の重力場による相対論効果を
正しく取り込まないと、数マイクロ秒の精度で太陽系外の天体の位置を決められない。
方法
多 体 系 で の ポ ス ト・ニュー ト ン 近 似 の 研 究 は 限 ら れ て い る 。連 星 パ ル サ ー へ の
興 味 か ら 2 体 問 題 は 非 常 に 詳 し く 研 究 さ れ て き た 。し か し 、太 陽 系 の よ う な 多 体
系 は 、こ れ ま で の 観 測 精 度 で は そ の 必 要 性 が 無 かった た め 、あ ま り 研 究 さ れ て 来
な かった と い う 経 緯 が あ る 。し か し 、(1) で 見 た 通 り、JASMINE 計 画 で は 、1 次
の ポ ス ト・ニュー ト ン 近 似 で じゅう ぶ ん で あ る 。こ の 場 合 、す で に 定 式 化 が 存 在
す る ([Brumberg and Kopeikin, 1989,
Damour et al., 1991, Damour et al., 1992,
Damour et al., 1993, Damour et al., 1994])。ただし、変数等は定式化の都合上選ばれ
ているので、データ解析に合わせていくらか修正する必要があるだろう。この点に関して
は、ポスト・ニュートン近似の専門家の協力が望ましい。
なお、GAIA レポート [the GAIA Science Advisory Group, 2000] では、定常な四重
極モーメントをもつ物体に対するアインシュタイン方程式の厳密解の一つである Erez-
Rosen metric の有効性を説いている。しかし、惑星の公転運動のため、数ヵ月のタイム
スケールで太陽系の重力場は変動するので、そのような有効性は認められない。更に、
Erez-Rosen metric を利用した数値コードの開発を、同じ GAIA レポートで提唱してい
るが、むしろ、ポスト・ニュートン近似法を利用した方が、より直接的で簡単だと思われ
る。例えば、太陽系は四重極より高次のモーメントを持つが、Erez-Rosen metric にそれ
らを加えるのは大変だが、ポスト・ニュートン近似では既に取り込まれているからであ
る。なお、惑星の運動に対する光円錐効果 (光速度の有限性) は数十マイクロ秒の補正を
与える事が、最近指摘されている ([Kopeikin, 2001, Asada, 2002a])。
7.5 アストロメトリーパラメータの精度
7.5 アストロメトリーパラメータの精度
JASMINE は銀河面方向にサーベイしながら、1 検出器1回の観測で 1 画素のおよそ 70
分の 1、1 天体につきおよそ 1000 回観測する事により、最終的にサーベイ方向に 10µas
の精度を達成する計画である。データは明るい基準星を除き、基本的には 1 次元圧縮さ
れる。この時の銀緯方向の位置決定精度が問題となるが、銀極周りに 3.5 度傾けて歳差運
動させる事になっている。詳しい議論は、このあと述べるが、歳差運動により、1 つの天
体につきおよそ 7 度の角度をなす 2 つの大円で交わることになるので、銀緯成分も一定
の観測精度が得られる。正確には以下に述べるように銀緯依存性があるが、およそ 10 倍
程度精度が落ちるだけですむ。銀緯方向に 10 倍悪くなったとしても固有運動は 10kpc で
5km/s の誤差なので、視線速度の精度が数 km/s の精度である事を考慮すると力学構造
の解析の上では十分な精度が得られており問題はないと思われる。また、この問題は星の
2 次元的な位置と固有運動のみの問題であり、年周視差が 10 倍悪くなる事はない。すな
わち、年周視差のパラメータはサーベイ方向成分より求める事が出来るので充分な精度で
求める事が出来る。以上の見積もりはデータが 1 次元圧縮された場合であるが、我々は 1
部の星について 2 次元データを残す計画である。それにより、互いのデータをタイルの張
り合わせの如くつないでいくことにより銀緯方向に更なる精度が得られる。また、太陽が
銀河面を通過する前後、銀河面とは異なる大円をサーベイする計画であるが、そのデータ
も用いることにより、銀緯方向の位置決定精度を上げる予定である。
7.5.1 銀緯方向の精度の見積もり
JASMINE では明るい星を除いて基本的には得られたデータを 1 次元圧縮する事になっ
ている。具体的にはサーベイ大円と垂直方向成分のデータが圧縮される事になる。そうす
ると、大円方向には観測回数に従って一定の位置決定精度が期待できるが大円に垂直な成
分は位置が正確には求まらない。大円に垂直な成分はその大円に交わっている別のサーベ
イ大円で観測された位置を用いて決定される事になる。全天サーベイの場合、ある星に対
してそれと交わる大円は色々と存在し位置決定を行うことが容易であるが、JASMINE の
場合、回転軸が銀極から 3.5 度傾いてはいるもののほとんどサーベイの大円は銀河面方向
である。そこで、銀経方向には充分な位置決定精度が得られるが銀緯度方向にはどの程度
精度が得られるかが問題となる。しかし、以下に示す解析から、位置決定精度がほとんど
出ないと思われる銀緯方向でも僅かな歳差運動による大円のずれから銀河面方向の位置決
定精度の 10 倍程度悪いだけですむことがわかる。具体的解析を次に示す。
わずかな角度 θ だけずれた2つの大円のサーベイから大円と鉛直方向にどれだけの精度
163
164
第7章
位置天文情報の精度評価
図 7.8: 観測精度の見積もり
が得られるかを検討する。2 つの大円のサーベイを行ったが実際にはその大円からそれぞ
れ δα, δα だけずれてしまっているとする。この時大円の交点がどれだけずれるかを考え
る。そのずれをそれぞれ ∆1 ,∆2 とする。この時、以下の関係が成立。
δα
δα
−
sin θ tan θ
δα
δα
−
∆2 =
tan θ sin θ
∆1 =
(7.20)
(7.21)
以上を行列表示すると、
∆1 sin θ
∆2 sin θ
=
1
cos θ
− cos θ
−1
δα
δα
となる。よって、誤差 δα, δα は
1
−1 cos θ
∆1 sin θ
=−
∆2 sin θ
− cos θ
1
1 − cos2 θ
1
−∆1 sin θ + ∆2 sin θ cos θ
=−
−∆1 sin θ cos θ + ∆2 sin θ
1 − cos2 θ
δα
δα
7.5 アストロメトリーパラメータの精度
1
=
sin θ
165
∆1 − ∆2 cos θ
∆1 cos θ − ∆2
∆1 , ∆2 は充分な精度がある。その精度を σ とすれば δα, δα の精度 σ⊥ は
√
σ⊥ ∼
2σ
sin θ
(7.22)
ここで、微小角度 θ を 7◦ とすれば、
√
2σ
sin 7◦
∼ 11σ
σ⊥ ∼
(7.23)
(7.24)
以上より、サーベイ大円を 7 度傾けるだけで、大円方向の位置決定精度を σ とした場合、
銀緯方向に 11σ 程度の精度を出す事は可能である。
7.5.2 観測精度の銀緯依存性
衛星の姿勢と軌道の章で述べたように、JASMINE は衛星の回転軸を銀極より、i = 3.5◦
傾けて歳差運動運動させながら銀河面をサーベイする。従って、最終的に銀河面を含め、
銀緯± 3.5 度以内を観測するが、この観測方法は銀緯ごとに観測回数が異なる。銀緯 3.5
度以内において、(絶対値の大きさで)高銀緯であるほど観測回数が多いため、サーベイ
方向の精度は上がる。一方、サーベイ方向に直角な方向成分は観測する星を通る 2 つの大
円(衛星の自転によりひとつの大円上を観測するが、その大円は歳差運動とともにずれて
いき、歳差の周期の間に銀緯± 3.5 度以内の星は異なる大円 2 つと交わる事となる。)の
なす角度が大きいほど精度が上がるが、そのなす角度は銀緯 0 度の時 2i = 7◦ で最大で、
銀緯の絶対値が大きくなればなるほど大円のなす角度は小さくなり精度は落ちる。上述の
2 つの効果を考え合わせるとサーベイ方向は高銀緯ほど精度は上がり、サーベイ方向に垂
直な成分は高銀緯ほど精度は下がることになる。具体的には、以下に示す。
i = 3.5◦ 傾けて歳差運動させる時、観測する星の銀緯を is (−1 < s < 1) とする。この
√
時、銀緯 is の緯度線とこの星を通る大円サーベイのなす角度は i 1 − s2 となる。歳差運
√
動により、観測される星を大円が通過していくが、その際の観測回数は i 1 − s2 の逆数
に比例する。すなわち、銀緯 is 度でのサーベイ方向の観測精度を σ(s) とすると、観測回
数の平方根で、精度が良くなるので
σ(s) = σ(0)4
1 − s2
(7.25)
となる。サーベイ垂直方向に関して、その精度を σ⊥ (s) とする。銀緯 is 度の星の観測
√
において、通過する大円のなす角度は 2i 1 − s2 となる。従って、垂直成分の観測精度は
166
第7章
位置天文情報の精度評価
2
σ(s)/ σ(0),
σ⊥(s)/ σ⊥(0)
ratio
1.5
1
0.5
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
s
図 7.9: 銀緯に対する σ(s)/σ(0), σ⊥ (s)/σ⊥ (0)
σ⊥ (s) =
=
=
√
2
√
σ(s)
sin(2i 1 − s2 )
√
1
2
√
σ(s)
sin 2i 1 − s2
√
1
2
√
σ(0)
sin 2i 4 1 − s2
1
√
σ⊥ (0)
4 1 − s2
(7.26)
(7.27)
(7.28)
(7.29)
となる。以上の結果をまとめて、B : σ(s)/σ(0)、C : σ⊥ (s)/σ⊥ (0) をまとめたのが図
7.9 である。横軸は銀緯の絶対値(i = 3.5◦ を基準として s =|b/3.5◦|で表す)であり、
その銀緯での分散精度を銀緯 0 度を基準としてグラフを書いている。実線の方がサーベイ
方向(銀経方向)の精度で、銀緯が大きくなるにつれ精度が良くなるのは観測回数が高銀
緯ほど多いためである。ここでは観測領域を具体的な有限の値で計算せず、観測領域が 1
点であるという理想的な計算を行なっているので、s=1 の極限では分散は 0 へ収束してし
まうが、この s=1 近くの値を除いては十分傾向は正しく読み取れる。一方、銀緯方向の
精度は高銀緯になるほど悪くなる。これは 2 つの観測大円のなす角度が小さくなるためで
7.5 アストロメトリーパラメータの精度
167
ある。高銀緯程悪いが s=0.9 という高銀緯でも銀緯 0 度での精度の 1.5 倍程度悪くなるだ
けなので観測されるほとんどの銀緯で特に問題はないと考えられる。
7.5.3 観測年数、回数によるパラメータ見積もり精度依存性
星の位置決定精度は理想的には蓄えられたフォトン数で決まるが、現実問題としてはそ
の観測される時間の分布状況によって、理想的な精度が達成できなくなる。理想的な精度
を得るためにどういった期間どの程度観測すれば良いのかが問題点となる。そこで我々は
数値シミュレーションを行い観測期間や観測点の数がどうあれば良いかを見積もった。
シミュレーションは以下のように行った。トータルの観測で 10µas が達成できるよう 1
回の観測精度を設定する。星の運動は 2 次元天球面上で年周運動(一般には楕円運動)と
固有運動(直線運動)をおこなうが、その星の運動を大円上(1 次元)にプロットた時の
運動は、三角関数と直線運動の和により表す事が出来るので観測点を以下の式にてフィッ
ティングをする。
x(i) = a sin Ωt + b cos Ωt + ct + d
(7.30)
ここで、パラメータ a,b は年周視差、c は固有運動を定めるパラメータ、d は定数。以上
の式にてフィットさせた時のそれぞれのパラメータ見積もり誤差を σa 、σb 、σc 、σd とし、
また、理想的な誤差をそれぞれ σa,ideal 、σb,ideal 、σc,ideal 、σd,ideal とすると、理想的誤
差に対する実際の誤差は以下の表 7.5 のようになる。
この表において、値が1に近づけばそれだけ理想的状況に近づいている事を意味する。
まず、表 7.5 の一つ目は観測回数は 32 回に固定し、その 32 回を 1 年,2 年,3 年,5 年,
10 年に分布させて最終的な観測誤差を調べた表である。誤差は 2 年以上観測しておれば
大体精度は理想的値である 1 に収束している。従って 2 年以上の観測があれば良い。次に
2 つ目の表は観測年数を 5 年として、観測点を 32 回、16 回、8 回、6 回、4 回にした。観
測点数を変えているが、一回の観測精度を調整しトータルで理想的な精度が同じになるよ
うにしている。具体的に言えば観測点 8 回の観測は 32 回の観測より 1 回の観測で 2 倍精
度が良い。この表を見て解るとおり 8 回以上の観測点が望まれる。
以上の結果より、観測年数としては 2 年以上あり、観測グループは 8 グループ以上あれ
ば、理想的な位置決定精度が得られる事が見て取れる。
168
第7章
位置天文情報の精度評価
● 32 点
年数
1
2
3
5
10
σa /σa,ideal
1.62
1.09
1.04
1.01
1.01
σb /σb,ideal
t
t
σc / σc,ideal
2
2
σd /σd,ideal
1.01
1.00
0.99
1.01
1.00
1.61
1.09
1.05
1.02
1.01
1.44
1.04
10.1
0.99
0.98
観測回数
32
16
8
6
4
σa /σa,ideal
1.01
1.01
1.01
1.64
1.75
σb /σb,ideal
t
t
σc / σc,ideal
2
2
σd /σd,ideal
1.01
1.02
1.06
1.24
1.72
1.02
1.03
1.02
1.81
2.31
0.99
0.97
0.96
1.40
1.59
●5年
表 7.5: 観測年数、回数による精度依存性
7.6 連星系の問題
単独星の場合は、前述したような方法で、年周視差などの位置天文情報を導出してくる
ことが可能である。しかし、銀河系の大半の星は、連星系または多重連星系を構成してい
ると言われている。その場合は、解析に当たり注意が必要である。
高精度位置天文観測では、星像中心の位置は、前述したような方法で高精度で求めるこ
とが可能であるが、分解能自体は、さほど良くない (0.1∼0.2 秒程度)。従って、連星系
が分解できない場合が多く、一つの像とみなして、その中心の位置や運動を追うこととな
る。しかし、その中心は、一般には重心ではなくて、連星の光学中心であり、重心とは一
致していない。従って、短時間で固有運動を測定した場合、単純に天球上の直線運動とし
て固有運動を求めると、重心ではなくて光学中心の固有運動を求めてしまうことになり、
正しい力学情報を得ることができない [宮本昌典, 1997] 。従って、位置天文情報を求める
際には、このような状況をふまえたデータ解析方法の確立が必要となる。単独星の連星系
の判別、連星系と判断した場合の位置天文情報の求め方(天球上の運動に対して、モデル
を仮定し、fitting するパラメータ数を増やすなど)を開発しておくことが重要である。
169
第8章
データ解析方法
この章の目次
JASMINE では、現在の最高精度の星の位置カタログであるヒッパルコス衛星のものよ
り2桁の精度向上となる。その達成のためには、姿勢や観測装置の安定性も要求されると
ともに、データ解析の工夫も必要となる。さらに、数億個の星という大量のデータ数とな
ることも考慮し、効率良い解析方法の開発も必要な要素である。
データ解析方法としては、本来は先ず、観測されたデータをもとにある観測時間での星
像中心を求める。その際には、7.1 節で述べたように、観測時点での光学系や検出器の変
図 8.1: データ解析の流れ図
170
第 8 章 データ解析方法
動による PSF の変動等も考慮する必要がある。そして次に、観測時点での衛星の姿勢を
考慮し、天球上のどこに星があるのかを決める必要がある。その際には、太陽系内での重
力レンズ効果や光行差等の相対論的補正を行う必要がある。こうやって決まった、天体の
天球上の位置とその時間変化から、位置、固有運動、年周視差を統計的解析により、導出
する。この一連の作業の中で、衛星の姿勢方向や観測装置の変動もすべてモデル化され
る。統計的解析で星像中心やアストロメトリ情報を導出する際に、姿勢や観測装置関連の
モデルパラメータも同時に導出される仕組みである。このような解析の中で求めるべきパ
ラメータの数は、数億個の星のアストロメトリーパラメータと姿勢や観測装置の変動モデ
ルなど非常に多くのパラメータが含まれている。これを統計的解析で解く場合には、直
接的に解くこと(マトリックスの反転)は計算機の能力などからいってもかなり困難であ
る。そこで、直接解く方法と同等なものとして、逐次近似法による解析手法をとらざるを
得ない。その逐次近似法の流れを書いたものが、図 8.1 に示されたデータ解析の流れ図で
あるとご理解いただきたい。では、次にこの流れ図の説明を行う。
基準星となりうる、比較的近傍の単独星等の性質が良い星の位置天文情報や明るさを先
ず仮定する(以前のカタログを用いたインプットデータなど)。そこに衛星の軌道情報、
ならびに太陽系内での重力レンズ効果を加味すると、衛星上で星がいつどの方向に “見え
る” かが分かる。そこに、衛星の姿勢方向を考慮すると、望遠鏡の視野内に含まれる星の
位置が評価できる。さらに、観測装置のモデルを考慮すると、検出器上の星像の位置が理
論的に評価できる。この評価値と実際の観測で得られたデータ値を比較し、それらの差が
小さくなるようにもともとの星の位置情報や衛星の姿勢方向、観測装置の変動のモデルパ
ラメータを変化させ、逐次的にすべてのパラメータの解を求めていくという手法を採用す
る。観測装置や姿勢の変動モデルのパラメータがこのように決まれば、それらを用いて一
般の星に対してもデータ解析を行い、位置天文情報を得る。この方法は、基本的にはヒッ
パルコス衛星で採用され、GAIA も同様なものである。この方法では、衛星の姿勢方向や
観測装置のモデル化が重要な要素となり、検討が重要である。我々は、§9 で述べるような
最新のソフトウェア技術を用いたシミュレーターを構築し、データ解析方法の検討も進め
ていく予定である。
171
第9章
JASMINE シミュレーター
この章の目次
9.1
9.2
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
ガイドライン . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
9.2.1
9.2.2
9.2.3
9.2.4
9.2.5
9.2.6
9.2.7
9.2.8
9.3
9.4
9.5
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
計算機言語 .
UML ツール
開発環境 . .
コード管理 .
文書化 . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
テスティングフレームワーク . . . . . . . . . .
まとめ . . . . . . . . . . . . . . . . . . . . . .
要求定義 . . . . . . . . . . . . . . . . . . . . . . .
分析 . . . . . . . . . . . . . . . . . . . . . . . . .
9.4.1 対象モデル . . . . . . . . . . . . . . . . . . . .
9.4.2 操作モデル . . . . . . . . . . . . . . . . . . . .
9.4.3 成果物モデル . . . . . . . . . . . . . . . . . . .
9.4.4 成果物利用モデル . . . . . . . . . . . . . . . .
9.4.5 装置モデル . . . . . . . . . . . . . . . . . . . .
9.4.6 環境モデル . . . . . . . . . . . . . . . . . . . .
設計 . . . . . . . . . . . . . . . . . . . . . . . . .
9.5.1 UI パート . . . . . . . . . . . . . . . . . . . .
9.5.2 モデルの取り扱い . . . . . . . . . . . . . . . .
9.5.3 宇宙モデル . . . . . . . . . . . . . . . . . . . .
9.5.4 観測モデル . . . . . . . . . . . . . . . . . . . .
9.5.5 観測装置 . . . . . . . . . . . . . . . . . . . . .
9.5.6 データ解析アルゴリズム . . . . . . . . . . . . .
9.5.7 衛星モデル . . . . . . . . . . . . . . . . . . . .
9.5.8 座標変換 . . . . . . . . . . . . . . . . . . . . .
9.5.9 観測データに含まれる誤差およびバイアスの要因
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
174
175
176
177
177
178
179
179
184
184
185
185
185
186
186
186
186
189
192
192
194
195
196
197
198
172
第 9 章 JASMINE シミュレーター
9.6
9.7
9.5.10 熱・構造解析 . . . .
9.5.11 データベースモデル
9.5.12 サイエンス . . . . .
動作例 . . . . . . . . . .
補足 . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . .
. . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
199
199
200
200
202
9.1 概要
JASMINE では、装置仕様からサイエンスアウトプットまでを統一的にシミュレー
ションするソフトウエア、JASMINE シミュレーターの開発をすすめている。この章は、
JASMINE シミュレーターを開発するにあたっての基本的ガイドラインと目標、進捗状況
を示すことを目的とする。
近年、国内においても国際的にも、天文学観測のための衛星プロジェクトがたくさん提
案されている。衛星プロジェクトでは、一度衛星を打ち上げてしまうと仕様変更も保守も
ほぼ不可能であること、また観測期間も衛星の寿命で決まるが、通常 5 年程度と地上観
測機器に比べてはるかに短期間であり、この間に効率的なデータ取得を行なう必要があ
ることから、予め様々なシミュレーションを行なって、機器の仕様を詳細に定めている。
SIM 計画 でも衛星上のデバイスから最終的なサイエンスの結果までの end-to-end シミュ
レーションが一つの重要なキープロジェクトとなっており、第一段階のシミュレーション
結果が 2002 年度に示された [Sozzetti et al., 2002]。また GAIA プロジェクト のレポー
トでは、「GAIA シミュレーターは大規模かつチャレンジングなプロジェクトであり、国
際的かつ多くの分野のエキスパートが協力するチームになる点で、工学や計算機の分野
のコード開発と何ら変わるところはない」と分析してる。GAIA シミュレーターワーキ
ンググループでは、「ここ 10 年で発達した巨大ソフトウエアプロジェクトの方法や道具
を利用することを提案する」[Luri and Babusiaux, 2001] と結論付けている。JASMINE
シミュレーターも、多国の共同となるかどうかは別としておおよその事情は同様である。
従って、GAIA 同様の結論に達すると考えられる。
このような衛星観測の統合シミュレーションシステムは、日本の科学衛星では未経験の
領域であり、また巨大なシステムになることが予想される。様々な分野の研究者や技術者
が、そのノーハウをシステムの中に入れてゆく必要がある。巨大システムであり、多くの
人々が参加するシステム開発といえば、フリーソフトウエアや工学分野で利用されている
システム開発が思い浮かぶ。当然方法論としては、そういった分野での経験を取り入れて
ゆくことになる。要求や仕様の明確な定義が必要であり、またこのプロジェクトに関与す
るいろいろな分野の専門家の寄与を適切に管理し、情報を共有すること、また個別な分野
で利用されている特殊なツールではなく、多くの分野の人々が容易に導入できる道具や方
9.2 ガイドライン
173
法論を基本に組み立ててゆくことが必要である。
object 指向技術の概要、object 指向設計で用いられる「デザインパターン」、また
object 指向プログラミングの設計に多用される UML 図と呼ばれる図の読み方について
は、appendix に譲る (E.3.3 章参照)。この章では、シミュレーターでの使用言語の選択、
シミュレーターのプログラムの設計と動作例を示す。シミュレーターのプログラム設計を
見れば、このような衛星シミュレーターはもちろんだが、データ解析や理論シミュレー
ションなど、object 指向技術が計算機を用いたサイエンスを行なう上で広く有効であるこ
とが理解いただけると思う。また、Object 指向の問題点はいろいろ指摘されているもの
の、現段階で複雑なソフトウエアを構築する場合、Object 指向を用いることが唯一の解
決策であることは否定できない。
GAIA の国際会議では、計画全体に関する会議でも複数の口頭発表の時間を割いてお
り、シミュレーターのための会議も個別に開催されており、またヨーロッパでは査読論文
誌でも開発手法に関する論文 [O’Mullane and Lindegren, 1999] を受け付けるなど、ソフ
トウエア科学で培われた技術の導入には積極的である。JASMINE 計画でも、次世代の計
画にはこういった技術の有用性はますます拡大すると考え、個別のワーキンググループを
立ち上げ、その作成に取り組んでいるとともに、既に二回ほど方法に関するレクチャーを
行なってきている∗1 。このレポートでも、シミュレーター及び関連するソフトウエア技術
に関して、一節を割くことにする。
9.2 ガイドライン
9.2.1 概要
シミュレーターが扱うべき内容は、サイエンスの目標としてどこまで可能か、そのため
の装置のデザインの検証から最終的なデータの取り扱いまでの統合シミュレーションであ
る。コアチームとして、山田、上田、桑原、矢野、郷田を中心とする少数名で全体のデザ
インを決める。巨大システムであるため、分かりやすく、モジュール化されて、モジュー
ル同士が容易に情報交換できるような構造が必要である。このような要求に対応できるよ
うな、言語の選択、開発体制の確立、使用ツールの選択を行なう必要がある。また、天文
学分野では衛星を使った将来計画が多く提案されているので、可能な限り汎用性を持たせ
た設計とする。
∗1
平成 14 年度国立天文台共同研究による。
174
第 9 章 JASMINE シミュレーター
9.2.2 計算機言語
以上の目的のため、我々は Unified Modeling Language(UML) を使用して、コア部
分の実装にはオブジェクト指向言語を用いる。オブジェクト指向言語には Java, C++,
SmallTalk, ruby など様々なものが提案されている。我々は、次の理由により Java を用
いることとする。既存言語の比較については、E.2.4 を参照のこと。
オブジェクト指向性 JAVA は、Sun により開発された完全なオブジェクト指向言語で
ある。
プラットフォーム非依存 JAVA で書かれたプログラムは、Windows でも Unix でも
Mac でも無償で提供されている JAVA 実行環境を導入することで実行可能であり、
また開発環境もこれらのプラットフォームで無償で用意されている。従って、JAVA
での開発は、通常使用している計算機環境に実行環境あるいは開発環境を導入すれ
ば、利用することも開発に参加することも可能である。∗2
ツール 従来、科学者は C や Fortran で開発してきたが、この場合には言語の選択だけで
なく、科学計算において重要となる描画関連ソフトウエアの選択や、描画に必要な低
レベルのウィンドーシステムの選択など、様々な制約がかかってくることとなる。処
理系が高価でないとしても、描画システムは高価であったり、またプラットフォーム
に依存して互換性を確保しにくいなどの問題があった。JAVA は、描画やウィジェッ
トなどのツールが標準で提供されているところが便利である。
ウィジェットに関しては、Java 1.2 以降で標準の SWING の使用を考えている。描画は
AWT の上で開発されたいくつかのアプリケーションの使用性を評価し、その仕様にあわ
せた開発を行なう。
描画に関するプラットフォーム依存性に関しては、例えば二次元の図に関しても、天
文学で広く使われている SuperMongo
∗3
を用いようと思えば、Windows 上の処理系は
Borland C に限られるし Mac での実装は未経験の領域である。三次元の高機能なシステ
ムでは、Unix で動作するものは X Window システムを要求するため、Windows へ移植
する場合は多くのコードを書き換える必要がある。X を併用する場合は、使用するパソコ
ンに X-サーバーを導入する必要があり、これはかなりのコストがかかることになる。ウィ
ジェットは Java 以外では Tcl/Tk が比較的移植性に優れているが、コーディングがそれ
ほど容易ではない。
∗2
∗3
Java の実行環境は、計算機上の作業に習熟しているユーザーは無料でダウンロード可能だし、作業に習
熟していなくても 2000 円から 3000 円程度の書籍を購入すれば、CD-ROM が手に入り、インストール
方法も詳しく述べられている。現在入手可能な Java 環境に関しては、表 E.4 に示してある。
Robert Lupton と Patricia Monger が作成したグラフィックソフトウエア。
9.2 ガイドライン
175
GAIA 計画では、Java の欠点に関して、実行速度が遅い、天文学者が使い慣れていな
い、数値ライブラリが揃っていない、という点を挙げている。実装してみて動作速度の上
で問題があれば、部分的に C++の併用を考慮する。しかし、現段階ではこの必要はない
と考えている。数値計算部分に関しては、Linux においても Windows においても現在の
Java の実行速度は十分高速である。∗4 実行速度の遅い部分は、主に描画などのウィジェッ
トであり、この部分は C++ より Java を用いる利点が大きいと考えられる。数値ライブ
ラリの不足に関しては、現在 JSci や CCS など、いくつかのプロジェクトで、物理学等の
科学分野への応用を意識したライブラリが開発されている (E.8.2 章参照)。従って、全体
を通じて Java でコーディング可能であると考えている。∗5
個別のパーツは、コア部分と同じオブジェクト指向言語で書かれてもよいし、C や
Fortran といった言語でもコア部分の仕様に合わせたインターフェースが用意されれば良
い。それぞれのチームにより開発可能である。インターフェースとして JNI と CORBA
の選択肢があるが、標準化動向を考慮し、また並列化との相性を考慮して、CORBA を選
択する∗6 。従って、個別のパーツは最終的に分散オブジェクトとして動作するようラッピ
ングされる必要がある。ラッピングの方法は、それぞれの言語に依存するので、必要な状
況が発生次第考慮する。ただし、動作環境の自由度など Java を利用するメリットは大き
いので、開発済みのパーツで移植が困難な大規模なものでない限りは、極力 Java ライブ
ラリに移植する方向で考えたい。
なお、Java のバージョンに関して、1.1 と 1.2 で大きな変更があった。例えば、SWING
は 1.2 以降の標準だが、1.1 では標準添付されていない。1.2 以降を Java2 と呼んで、それ
以前の Java と区別している。現在、メジャーバージョンでは 1.4 が最新である。新たな
機能を追加した 1.5 の発表も予定されている。1.3 と 1.4 では CORBA 関係の API がか
なり変更になっている。JASMINE シミュレーター開発では、JAVA 1.4 をベースに行う。
9.2.3 UML ツール
設計には、UML を用いる。UML は、開発中のシステムの仕様を決め、その仕様をビ
ジュアルに、あるいは文書により表現する方法として、近年ソフトウエア開発においては
∗4
Java は、言語仕様により最適化が抑制されているため、高速化が難しいとされている。しかし、PC レ
ベルの計算機は実行速度のボトルネックはメモリー転送であり、パイプライン最適化などが十分に行なわ
れなくても実行速度に対する影響は少ない。メモリー転送については、むしろ設計の上でうまくカプセル
化することで対応すべきであり、Object 指向言語の利用はプラスに働くはずである。
∗5 Java の良い解説書として、
「Just JAVA」がある。初版は [van der Linden, 1996] あるいは日本語訳
[van der Linden, 1997]、現在は日本語版は Java2 対応の第 4 版 [van der Linden, 2000] に、英語は
第五版 [van der Linden, 2001] が出版されている。
∗6 GAIA では、他の言語との連携に Java native interface(JNI)、並列化に Remote method invocation(RMI) を使っている。
176
第 9 章 JASMINE シミュレーター
標準的表記法として浸透しており、UML を扱うための 50 種類程度のツールが開発され
ている。これを利用することにより、異なる多くのチームの共同作業が可能となる。ま
た、部分的に外注を行なうような場合、仕様が UML で記述されていることはほぼ必須条
件である。UML を使用するためのツールとして、GAIA チームは Rational ROSE と呼
ばれる 1 ライセンス 100 万円弱のソフトウエアを導入している。
天文学分野では使用経験がないため、機能的にどこまで必要かを含めて、評価する必
要がある。最低限、フォワードエンジニアリング (UML からソースコードへの変換)、リ
バースエンジニアリング (ソースコードから UML への変換)、XMI によるデータ交換が
可能なものが必要であると考えている。IIOSS や MagicDraw/UML が、現段階での評価
の対象となる。
IIOSS はフリーで流通しているソフトウエアの中ではかなり評価できるものだが、フォ
ワード・リバースエンジニアリングを繰り返す場合、コードの変更が適切の保持できない
点が難点である。また、IIOSS で XMI は出力できるものの、MagicDraw で読み込めな
い。XMI の仕様も変化している。MagicDraw は業界標準とされる Rational ROSE との
データ交換が可能なので、将来の拡張性と価格の点から、妥協できる製品ではないかと考
えている。
また、CASE ツールというより統合開発環境として、IBM の商用ソフトウエアとして
開発されてきた Eclipse というソフトウエアが、2001 年 11 月にオープンソースコミュニ
ティーに寄付され、現在フリーで利用できる。これに関しては調査が十分ではないが、上
に紹介した MagicDraw/UML もバージョン 5.5 から Eclipse との同期機能が付けられた
ようで、開発メンバーが増えた場合には導入を積極的に検討する必要があるだろう。
9.2.4 開発環境
複数名の開発となるため、動作検証のためなどに共通で利用可能な計算機等が必要と
なる。
近年パーソナルコンピューターはだいぶ廉価になっており、天文学で多用されるシミュ
レーションなどでも、Intel 互換 CPU を搭載した AT 互換パーソナルコンピューターに
Linux と GNU 等から提供されるフリーのデバッガーの組合せで開発し、大きな計算は
スーパーコンピューターで実行するというスタイルが一般的である。しかしながら、実際
に複雑なプログラムのデバッグを行なってみると、デバッガーがレポートするエラーの発
生場所と実際にエラーを起こしている場所が異なるなど、問題点が多く、開発効率を著し
く低める原因となっている。そういった経験から、開発者がより安定性の高いハードウエ
アおよび処理系 (コンパイラ) を使用して開発を進められるよう整備することが必要であ
ると考える。
9.2 ガイドライン
177
また、ハードウエア及び処理系の安定性の以外に、上で述べた UML を使用できる環
境、後で述べるような XML、Unicode を使用するための環境や、Java で利用可能な基
本ライブラリなど、従来の天文台での計算機環境整備とは異なった視点からの環境整備が
必要となってくると予想される。こういったソフトウエアを、JASMINE 関係者の事情に
従って柔軟に整備してゆける環境が必要である。そういった事情から、JASMINE 独自の
開発環境を、早急に用意する必要がある。幸い、平成 15 年度に東レ科学技術研究助成金
をいただいたので、最低限必要な開発環境は揃えることが出来そうである。
さらに、テスト段階では CPU パワーはそれほど必要とされないが、GAIA レポートに
おいても数億星というデータ量は非常にチャレンジングであると分析している。今後、大
規模なシミュレーションを行なってゆく場合、また実際にデータを取得して解析する場合
には、CPU 的にもプロジェクトが占有可能な計算機を用意する必要がある。
9.2.5 コード管理
シミュレーターのコードは CVS(concurrent version system) により保守される。CVS
は、保管庫を中央に置き、コードの開発を保守する。ただし、ファイルベースの管理であ
るため、ファイルの名称変更やディレクトリーの移動などに対応できない欠点がある。こ
れを補うため、webdab プロトコル上で動作する subversion というソフトウエアが Free
Software Foundations(FSF) で開発途上である。現段階では α バージョンであるため、
すぐに導入するのは危険であるが、JASMINE は長期のプロジェクトであるため、時期を
見て CVS から subversion へ変更する可能性を含める。現在の CVS サーバーの ROOT
は cvs.jasmine-galaxy.org:/Jasmine/cvsroot である。
cvs サーバーは、cvs.jasmine-galaxy.org でアクセス可能である。ネットワーク越しの
cvs のアクセス方法には ssh や rsh などのシェルを用いる方法と、pserver と呼ばれるサー
バークライアントタイプの接続方法を用いる方法とがある。しかし、pserver の暗号は貧
弱であり、近年は計算機管理者のセキュリティー上の管理責任が重要視されているので、
上記のの cvs サーバーでは ssh でのアクセスに限定する。開発者、即ち cvs をアクセスす
るメンバーは、このホストにアカウントを申請し、ssh2 の DSA 公開鍵を管理者に送付す
ることで、アクセス権を得ることができる。
9.2.6 文書化
共同のプログラム開発、あるいは開発者以外のものが利用することが想定されている
コード開発においては、文書化は重要である。しかし、説明文書を別に用意すると、プロ
グラムの機能が変更と文書との整合性を保つ作業が非常に大変になる。プログラムの中に
178
第 9 章 JASMINE シミュレーター
説明を書き込める形の文書化ツールを利用することが望ましい。Java では Java doc とい
う文書化ツールが附属している。この規格に従って、ソースコードの中に適切に説明を書
き込んでゆくことができる。Java 以外のプログラム言語を併用する場合、統一的な文書
管理は難しい。同様の機能を持ったものとして、C++のための Doc++がある。より多く
の種類の言語をサポートした RoboDoc であれば、複数の言語のサポートが可能である。
しかしながら、現段階では Java 言語をメインにして開発する予定なので、ソースコード
に Java Doc に従ったコメントを挿入してゆくこととする。
また、コードレベルのドキュメントではなく一般的なドキュメントが必要な場合、極
力 XML 文書で、日本語を用いる場合のコード系は UTF-8 で記述することを推奨する。
XML を利用する理由は構造化文書の標準として浸透しつつあること、XML は計算機に
とって処理しやすい文書であり、後からの様々な加工に適していることである。またコー
ド系として UTF-8 を使用するのは XML が仕様として Unicode をサポートすれば十分と
規定しているためである。XML を利用するには、XML パーサーと XSLT プロセッサと
呼ばれるソフトウエアが必要となる。数種類のものが、フリーで配布されている。
ただし、サイエンスの文書では数式が多くでてくる。XML を利用して数式を記述しよ
うとすると、mathml を使う必要があるが、非常に書きにくいため、しばらくは TEX の
利用をやむを得ず継続する必要があるかもしれない。
XML にはもう一つの利点がある。JASMINE シミュレータは、動作時に必要な装置の
配置や星の分布などをセットする。シミュレーションでは、多数のパラメータのうち少
数のパラメータだけを変更して、多くのパラメータは共通で行ないたい場合もある。こ
のような場合、以前に使用したパラメータを保存し、再利用する手段が提供される必要
がある。JASMINE シミュレーターのオブジェクト構造は、木構造をなしているであろ
う。そのようなデータ構造は、XML と相性が良い。そして、Java2 では XML の入出力
に必要な XML パーサが標準で提供されている。また、XML はアスキーテキストなの
で、パラメータの変更を使い慣れたエディターで容易に行なうことができる。∗7 従って、
JASMINE シミュレータの開発者及びユーザーは、XML 文書を扱えることが望ましい。
9.2.7 テスティングフレームワーク
近年 eXtreme Programming ということが言われている。eXtreme Programming は
開発における哲学のようなものを示したもので、具体的なツールをさすものではない。こ
のなかでコードの「テスト」を非常に重視しており、これに従って xunit と呼ばれる一連
∗7
近年増加している Java で作成されたアプリケーションでは、設定ファイルが XML 形式になっているも
のが多い。Web サーバーの tomcat もそうだし、build ツールの ant も build ルールを XML 形式で書
くようになっている。
9.3 要求定義
179
のテストツールが開発されてきた。xunit の x はそれぞれの言語を示す。
JASMINE シミュレーターでも、膨大なソフトウエアになり、仕様の管理などに大きな
コストがかかることが予想される。そこで、適切なテストコードを実装し、テストを自動
化することにより、コード及び仕様管理が開発の妨げにならないよう配慮する必要があ
る。これには、テスティングフレームワークの導入が必須である。我々がメインに利用し
ようと考えている Java では junit を利用し、この仕様に従ってテストコードの実装、ま
たテストの自動化のために ant を導入する。
9.2.8 まとめ
JASMINE シミュレーターを利用するには、各自の使用している計算機上で Java1.4
以降の実行環境を用意する必要がある。シミュレーター用の jar ファイルは、web 上で
JASMINE メンバーに公開される予定である。
従来天文台や天文学に関連する計算機環境の整備は、巨大なデータは扱うものの、単純
な計算の繰り返しを高速に処理しようという動機で行なわれてきた。このような大規模か
つ複雑なソフトウエアの構築は、従来の天文学分野にとって未経験の領域である。そのた
め、開発環境としてハードウエアにおいては価格よりも信頼性を重視した機種の選定、ま
た複雑さに対応するためのさまざまなソフトウエア製品に対する予算配分などが必要と
なる。
JASMINE シミュレーターの開発に参加するには、各自の使用している計算機上で
Java1.4 以降の開発環境、このバージョンに対応した junit および ant、開発者の計算機・
ネットワーク環境に併せた cvs、ssh を用意する必要がある。ssh の DSA 公開鍵を、cvs
サーバーの管理者宛に送付すれば、cvs サーバーに対するアクセス権が与えられ、ソース
コードの入手及び変更したコードの commit が可能になる。また、文書化のために、XML
パーサーと XSLT プロセッサ (例えば xt)、Unicode 対応のエディター (例えば emacs と
mule-ucs∗8 の組合せ) を揃えることが望ましい。
なお、Java 実行環境と開発環境の入手方法は、表 E.4 に、その他のツールの入手方法
についても、E.8 章にそれぞれまとめてある。
9.3 要求定義
最初に、JASMINE シミュレーターの要求定義を行なう。JASMINE シミュレーターの
要求定義は、文章で表現するとおおよそ図 9.1 のようになる。
そこで、この要求定義をユースケース図に表現することを考える。JASMINE シミュ
∗8
宮下尚氏の開発した、emacs 上で unicode を扱うための emacs lisp ライブラリ
180
第 9 章 JASMINE シミュレーター
衛星シミュレーションシステムを作る。模擬宇宙モデルとして、銀河系内の星、
太陽系内の天体、系外銀河を含む系を考える。衛星の軌道・観測計画をキーボー
ドから入力し、熱環境変化による観測装置の変動も考慮して、これらからの光を
鏡で反射して CCD 検出器で像を結ぶ様子をシミュレーションし、個々の像から
個々の星像中心の位置を割だし、星像中心の時間変化から位置・固有速度・距離
を計算し、画面に表示する。これにより、サイエンスの精度を評価し、装置の仕
様の決定に役立てる
図 9.1: JASMINE シミュレーターの仕様を文章で表現したもの。太字で書いたもの
は、オブジェクトの候補、即ちクラスの候補となる。キーボードや画面といったも
のは、このソフトウエアの設計に直接関係ないので、クラスの候補から省かれる。
レーターは、観測対象である宇宙、サーベイ方法などを表す観測の方法のモデル、データ
の転送及び蓄積に関するモデル、蓄積されたデータを解析する場合のアルゴリズム、個別
の装置のモデル化、観測装置の環境に関わるロケットや軌道上の熱環境などのモデル化
が必要である。これらがどのように関わり合うかを分析すると、おおよそ図 9.2 のように
なる。
観測対象としての宇宙のモデルでは、天体や吸収に影響を与える星間ガスの分布を与
える。天体としては、星、系外銀河、太陽系内の天体などを考慮する必要がある。観測
モデルとしては、サーベイの方法、衛星の軌道、機上で行なう解析 (星像中心決定アルゴ
リズム等) が考慮される。生データとしてピクセル情報を全て転送すると、10Mbps から
100Mbps オーダーの転送が必要となる。L2 点からのデータ転送としてこの値が現実的か
どうかは専門家の意見を聞く必要があるが、機上で星像中心の座標を算出して転送する
方が現実的ではないかと考えられる。そうすれば、100Kbps 程度の転送で済むと考えら
れる。データ解析モデルは、転送された後のデータを処理して位置天文学的情報を算出
する方法のシミュレーションを行なう。このためのアルゴリズムの検討と、最低限必要な
生データの精度や空間分布などを割出すことが目的となる。装置のモデル化では、主に
CCD と光学系をシミュレーションする。このモデル化においては、環境モデルに基づい
た誤差の評価とサイエンスの精度との関係を考察する。環境のモデル化については、シ
ミュレーターは簡単なもののみを実装しておおよその評価を行なう。最終的には、市販の
ソフトウエアの組み込み、あるいは外注により、詳細な熱・構造解析を行なう必要がある。
我々の分析は、この要求定義から出発し、個別のパーツに関してはさらに詳細な要求定
義を加えてゆくこととする。データフローの観点から見ると、大まかなデータの流れは図
9.3 および図 9.4 のようになる。
図 9.2: JASMINE シミュレーターのユースケース図。
Servey Method
Orbit
Analysis
DataBase
Database
AstroObject
Centroid
FEM
CCD
Stellar Image
Noise
Optics
Size
PSF
Wave Front
Instrument Model
Weight
Propulsion
Rocket Satellite Model
Photon Count
Thermal and Structure
Observation Model
Stars
Data Analysis
Algorithm
Input Analysis Parameter
Do Simulation
Input Satellite Design
Conbined system
Universe Model
Extra Galactic Objects
Universe Model
9.3 要求定義
181
182
第 9 章 JASMINE シミュレーター
図 9.3: シミュレーターで扱うべきデータの流れの全体像。
9.3 要求定義
図 9.4: シミュレーションで扱うべきデータの流れ(snap shot から raw data までの詳細)。
183
184
第 9 章 JASMINE シミュレーター
JASMINE モデル
抽象モデル
TargetModel
対象モデル
宇宙モデル
OperationModel
操作モデル
観測モデル
ProductModel
成果物モデル
データベース
UsageModel
成果物利用モデル
データ解析モデル
InstrumentModel
装置モデル
機器モデル
EnvironmentModel
環境モデル
ロケット・衛星モデル
表 9.1: JASMINE シミュレーターは、他のプロジェクトにも転用可能なように、抽
象度の高い設計とすることが望まれる。このため、一つ高い抽象度のクラスを用意
し、JASMINE シミュレーター本体は抽象モデルに対する拡張として実装されるの
が望ましい。
9.4 分析
このサブセクションでは、ユースケース図にあるそれぞれのモデル、あるいはユース
ケースが持つべき機能を分析する。
このソフトウエアでは、将来別のプロジェクトにおいても応用が可能なよう、柔軟性の
高い設計にする。このため、表 9.1 に示すような、一つ抽象度の高いモデルに対する統合
インターフェースを構築する設計を行なう。抽象度の高いモデルは jslib モジュールとし
て、JASMINE 特有の部分は jasmine モジュール及びそのサブモジュールに実装される。
jslib モジュールが保持するクラスは、具体的な応用目的に依存しないよう設計されるべ
きである。
9.4.1 対象モデル
対象モデルは、天文観測では宇宙モデルであり、アストロメトリーにおいては、時刻を
与えた時に、三次元の点の位置を返却する機能が必要がある。視線速度観測などに備え
て、運動の情報を併せて保持・返却可能にすることが望ましい。また、広がりを持った物
体や面や立体などが、将来的にサポート可能であることが望ましい。有限要素や格子によ
る離散化は、三次元点データとその複合による適切な抽象化を可能にする。
次のように、段階的に複雑なものが用意される。
• 静止した一点
• 等速直線運動する一点
• 等速直線運動する複数点
9.4 分析
• 複雑な運動をする点
– 太陽系内の天体
– 連星
– マイクロレンズ
• 広がりを持った物体
– 銀河
– 星間ガス
9.4.2 操作モデル
操作モデルは、観測そのものを行なうプロセスのモデル化である。対象モデルのデータ
から、装置モデルのデータを使って、成果物モデルを生成することが、操作モデルの責務
である。
アストロメトリでは、操作モデルの役割は以下のようになる。
• 装置モデルの光学系の特性と衛星の軌道及び姿勢の情報を利用して、実際の検出器面
上のイメージを作成する。
• 検出器の特性からこれを pixel データに変換する。
• 星像中心決定アルゴリズムを用いて星像中心座標を得る。
• 星像中心の時系列データからアストロメトリカタログを得る。
サーベイモード、星像中心決定アルゴリズム、時系列からアストロメトリカタログを得
る方法は、交換可能なアルゴリズムである必要がある。
9.4.3 成果物モデル
アストロメトリーにおいては、成果物には三段階ある。実際の検出器上のイメージデー
タ、テレメトリで転送される生データと、最終的なカタログデータである。それぞれの変
換アルゴリズムは、成果物モデルの中で統一的に扱うことが望ましい。データリダクショ
ンを段階的に行なう必要があるが、機上と地上での役割分担は、仕様の検討後に決まるこ
とだからである。
9.4.4 成果物利用モデル
成果物利用モデルは、できたデータベースからどのようにしてサイエンスを引き出すか
をモデル化する。成果物利用モデルを使った検討で、成果物が持つべき性質を明らかにす
ることが、このモデルを統合シミュレーターに組み込む目的である。他のプロジェクトの
185
186
第 9 章 JASMINE シミュレーター
データについても、成果物モデルに適宜組み込んで成果物利用モデルを利用するだけで、
サイエンスが行なえることになる。
9.4.5 装置モデル
実際に観測を行なう装置をモデル化する。JASMINE の場合は、鏡あるいはレンズを含
む光学系と、検出器がモデル化される必要がある。通常は、装置はパーツの組み合わせな
ので、個別のパーツの複合によりモデルが生成されることとなる。これらの熱や振動に伴
う誤差を取り扱うために、装置を乗せる架台を装置モデルに含む必要がある。また、重量
や消費電力などを評価するためには、電子回路や通信系などに関しても、その動作の詳細
は別としても、最低限重量と消費電力に関する属性を持って、モデルの中の一つのパーツ
として位置付けられる必要がある。
9.4.6 環境モデル
観測装置に影響を与える、熱・構造的な要素を取り扱う。ロケットや衛星の軌道、太陽
などの熱源の位置、固有振動モードや誤差などを取り扱う。
9.5 設計
この章では、各パーツのソフトウエア上の設計に関して考察する。設計方針をいくつか
の部分に分けて解説する。それぞれの部分で適用されるパターンがあれば、パターン名を
示す。パターンの詳細は、E.5 章を参照していただきたい。パターンの適用方法の説明に
必要なクラス名やメソッド名として、E.5 章に示した GoF の文献のものを使う。
9.5.1 UI パート
このシミュレーターでは、パラメーターの設定や装置のデザインの入力、実際の観測
のスナップショットや連続的な観測のエミュレーションなど、様々な機能が盛り込まれる
予定である。こういった操作には、command パターン が有用である。クラス図は、図
9.5 のようになる。メニュー項目や操作において、さらに複雑な要求に応えるためには、
mediator パターン の併用が必要となる場合も想定される。
この設計では、UI クラスが Command クラスの各具象クラスを生成し、各具象クラス
が各 Builder の具象クラスを生成する。Command クラスの具象クラスから呼び出される
クラスが Builder でない場合は、すでに別のところで生成されたクラスを呼び出す必要が
ある。クラスが生成される前にクラス呼び出しを行なわないような、適切な方法が必要と
9.5 設計
187
jslib
storeCommand(aCommand)
command->execu
te()
receiver->buildPa
rt()
UI
Command
command
CommandInvoker
+execute() : void
+execute() : void
new
SetTarget
SetInstrument
SetOperation
DoSimulation
receiver
receiver
concreteCommand()
Output
+askUser() : void
receiver
TargetBuilder
receiver
InstrumentBuilder
OperationBuilder
+execute() : void
Operation
OutputData
+buildPart() : void
+buildPart() : void
+buildPart() : void
+currentItem()
+first()
create
+isDone()
OutputData
+next()
図 9.5: UI パートの設計。このモデルでは、クラス UI が全てを駆動することにな
る。再上位クラス Command は抽象クラスで、サブクラスに新たなコマンドを定義
できる。実際の操作は必要なオブジェクトの生成ととシミュレーションの実行、結
果の書き出しであるから、適切な Builder クラスか Operation クラスが Receiver
クラスになる。単純な場合を想定して、Client クラスが Invoker クラスを兼ねるよ
うになっている。将来分離する可能性がある。
なる。ただし、具象クラスの情報やその生成方法を知っているのは、jslib モジュールでは
なく jasmine モジュールである。そのため、jslib モジュール内の UI クラスは jasmine モ
ジュール内のクラスに継承される必要がある。
各具象モデルは、具象クラスがその生成において適切なリストを提供することにより、
jslib モジュールの側からリスト選択による具象クラスの選択が可能であり、これを実装
すべきである。しかし、より詳細にパラメーターを与えるなどの操作を可能にするため、
jasmine モジュールの中での置き換えが可能であるよう設計しておくことが望ましい。
ファイル入出力に関しては、複数のフォーマットをサポートすることが想定される。画
像データに関しては、通常テキストファイルと FITS 形式が必要である。この実装には、
Decorator パターンが適している。このパターンを適用して OutputData クラスの設計
を行なうと、図 9.6 のようになる。
描画に関しては、(1) 独自に実装する、(2)Java で使用できる適切なツールを使用する、
188
第 9 章 JASMINE シミュレーター
jslib
Output
use askUser()
+askUser() : void
+execute() : void
-component
receiver
OutputData
1
OutputResult
+currentItem()
+first()
+handleData() : AstroObject
+isDone()
+next()
GraphicOutput
FileOutput
OutputDecorator
+handleData() : AstroObject
+OutputDecorator( comp : OutputResult )
component->handleDa
PlainTextOutput
ta()
PostScriptOutput
jasmine
data type conversion is done
here.
FitsOutput
+FitsOutput( comp : OutputResult )
+handleData() : AstroObject
図 9.6: ファイル出力部分では、計算結果にあたるデータを適切に加工した上で、
ファイルへの出力を行なわなければならない。このため、加工部分に Decorator パ
ターンを適用して、適切な処理の後にストリームを出力する手続きが必要となる。
(3)Java 以外のツールで使用可能なデータファイルを吐き出すか CORBA や JNI などの
方法でリンクする、の 3 つの方法が考えられる。しかし、今のところその方針を定めて
いない。独自に実装する場合は時間がかかる。またシミュレーターシステムとは独立性を
高くすることが可能である。Java で使用可能な描画ツールもいくつか開発されているが、
いずれも使用経験が無いので、現段階では使用性などの評価が行なえない。このような場
合、最初は Bridge パターンを利用して実装する。将来設計がほぼ固まれば、Adapter パ
ターンの適用に変更される可能性もある。Bridge パターンの適用例は、図 9.7 である。詳
細は、GraphicsImp クラスの仕様による。
9.5 設計
189
jslib
OutputResult
+handleData() : AstroObject
-impl
GraphicOutput
GraphicOutputImpl
図 9.7: 描画部分では、初期には外部リソースを用いた実装となる。いずれ独自で開
発する可能性もあるが、外部リソースを用いるにしても独自で開発するにしても、
インターフェースに対する柔軟性を確保する必要がある。この場合、Bridge パター
ンを適用することになる。
9.5.2 モデルの取り扱い
確かに、図 9.3 および図 9.4 で示したように大まかなデータの流れ、個別のモデルの間
のつながりは、既に規定されているように見える。そうであれば、設計はこのデータの
流れに沿って、例えば宇宙モデルや衛星モデルといった個別のモデルの抽象モデルを用意
し、このモデル間の関連を規定し、抽象モデルに対応する具象モデルを作成するという
手順となる。しかし、例えば検出器一つ取ってみても、出力は理想的な点あるいはその集
合であったり、ある精度をもつ点の集合であったり、あるいは画像情報であったり、抽象
化のレベルを予め規定することは難しい。そこで、我々はまず抽象的なモデルと、モデル
同士のつながりの抽象的な取り扱い方法、そしてこれらを組み合わせた一つ一つのシミュ
レーションという形の抽象化を行うことにする。
モデルは、以下に示すように JASMINE の観測にかかわる観測対象や装置、観測に影
響する外部環境などを表すものである。これらは、シンプルに実装されるべきである。
実際にはモデル同士が連携している状況で、相互の関連性をシミュレーションしたいわ
けだが、そのためにモデルを繋げるための道具を用意する必要がある。今考えているモデ
ルはすべて入力に対してある応答をするものであり、その意味でデータフローの中継点と
考えられる。この、モデルに対する入出力を取り扱うために、モデルを生で扱うのではな
190
第 9 章 JASMINE シミュレーター
階層
機能
GUI モデリング層
GUI 部分の機能を集中させる
CORBA 通信層
通信方式を隠蔽する
コンポーネント層
実際の計算を行なう
表 9.2: JASMINE シミュレーターのソフトウエア階層構造
く、入出力を担当する抽象クラスに持たせる。抽象クラスを用意することで、モデル同士
のつながりの取り扱いは、相手のモデルに依存しない形で抽象化できる。
こういったデータフローの構造は、例えば AVS や OpenDX といったグラフィックエ
ディターを持った描画ソフトの上では一般的に用いられている。従って、こういった構造
での抽象化を行うのであれば、グラフィックソフトウエアのプラグインを実装するのが容
易であるように思われる。しかし、こういったグラフィックソフトウエアの上で実装可能
なプラグインは、モデルだけであり、モデルどうしの間に流れるデータはグラフィックに
必要なデータ型、例えば一次元、二次元のメッシュに張られた物理量の列であったり、有
限要素格子点のデータで順序付けされた物理量の集合であったりする。一般に、こういっ
たグラフィックソフトウエアはデータの拡張はできない。もし、モデルの間を流れるデー
タ型が予め規定できるのであれば、我々はあえてこういったモデルの抽象化を行う必要は
無かった。モデルどうしを繋ぐデータも拡張可能にしておくため、我々はグラフィックソ
フトウエアのプラグインを作成するというアプローチを取ることはできないのである。そ
こで、我々はこういった機能を持つソフトウエアの実装からはじめることにする。グラ
フィックなモデルエディターの構築は次の段階で考慮するが、まずこの枠組みにあわせて
我々のシミュレーションを分析し、いくつかの具体的なシミュレーションを実装してみる
ところからはじめる。
また、将来の拡張としては、CORBA IIOP などの通信機能を利用した分散処理を行
なう必要があり、また計算時間を必要とする長大なジョブにはバッチ処理を、そうでない
ジョブはリアルタイム処理をするというような機能分類も必要となる。バッチ処理にはグ
ラフィックは不向きであり、逆にリアルタイム処理では優れたユーザーインターフェース
の実装が不可欠である。そこで、表 9.2 に示すような階層構造を明確にして、これに基づ
いた設計が必要となる。
GUI モデリング層は多機能になるので、mediator パターンに近い実装を要する。コン
ポーネントが保持するプロパティーの変更は GUI モデリング層が統括し、コンポーネン
ト側は自分の保持するプロパティーを相手に通知する手段を持てば良い。プロパティーに
依存した表示方法の選択は、GUI モデラ側の機能として実装される。依存関係は GUI モ
デリング層のプロパティーマネージャーに委譲する。
9.5 設計
191
jslib
SetTarget
receiver
TargetBuilder
+buildPart() : void
new
concreteTargetBuilder()
jasmine
Interval
-t1 : double
-t2 : double
-children
SimpleUniverseBuilder
AstroObject
universe
0..*
+add( comp : AstroObject )
+getChild( index : int ) : AstroObject
attributes:Y0, Vy, T0, G0
+getPositoin()
method: toString, XYZ, LB, mn,
+remove( comp : AstroObject )
xy
other subclasses.
Planets, Satellites, Zodiacal
light, Solar wind etc.
SingleStar
MultipleStar
Neo
Quasar
Sun, Earth, and
Moon.
Not for observation.
SEM
ReferenceUniverse
SnapShot
-singletonInstance : ReferenceUniverse
-interval : Interval
+add( comp : AstroObject )
+add( comp : AstroObject )
+getChild( index : int ) : AstroObject
+getChild( index : int ) : AstroObject
+getInstance() : ReferenceUniverse
+getPositoin()
+getPositoin()
+remove( comp : AstroObject )
#ReferenceUniverse()
+remove( comp : AstroObject )
For satellite orbit
図 9.8: 宇宙モデルのクラス図。ReferenceUniverse クラス及び SnapShot クラス
は、抽象クラス AstroObject のサブクラスとして実装され、Composite パター
ンを利用することにより、集約オブジェクトの構造を実現できる。SnapShot は併
せて Interval を属性として保持する。生成は、TargetBuilder クラスが担当する。
ProtoType を用いる場合は、Clone オペレーションを AstroObject に実装する必
要がある。
通信機能と分散機能については ORB を採用し、通信方式は OMG 標準で Java でも標
準で搭載されている CORBA を利用する。コンポーネント間の通信に関しては、CORBA
の仕様に基づく制約があるかもしれないので、これに関しては早急に検討する。
バッチ処理機能は、GUI 版のシミュレーターのサブセットとして、モデルをロードし、
プロパティーを読み込み、実行して結果を書き出すだけに機能限定した別の実行モジュー
ルを用意することで対応する。
192
第 9 章 JASMINE シミュレーター
9.5.3 宇宙モデル
GAIA では、ReferenceUniverse クラスから SnapShot クラスを生成し、SnapShot ク
ラスは AstroObject を集約する構造になっている。このような集約構造を AstroObject を
親クラスである Component クラスとする Composite パターンで実装すれば、SnapShot
クラスも ReferenceUniverse クラスも一つの Composite クラスとして自然に実装され
る。Leaf クラスとしては GAIA の例に従って、SingleStar、MultipleStar、小惑星など
の NEO、Quasar などがあてられる。この場合、GAIA の SnapShot クラスで使用され
ている Interval 属性は、Composite クラスである SnapShot に持たせるのが適切である。
ReferenceUniverse クラスには Singleton パターンを適用する。
Composite パターンは、また領域分割にも適した方法である。実際に、流体計算法で
ある SPH 法の並列化のためにオブジェクト指向を利用した例∗9 でも、領域分割手法の
ために Composite パターンを利用している。領域分割は、将来扱うデータ量が増大し
た場合には、対象天体の検索の高速化のため、及び並列化を行なう上で必須であるが、
Composite パターンを適用しておけば、オブジェクトの生成部分と検索部分を少し変更
するだけで対応可能で、クラス階層に将来大きな変更を加える必要は無い。
Composite パターンをなすオブジェクトの生成には、Builder パターンあるいは Prototype パターンが利用される。この例では Builder パターンが適用されている。分析で
得られた様々な複雑さを持つ宇宙モデルは、抽象クラス TargetBuilder のサブクラスであ
る個別の具象クラスに対応し、どの具象クラスが Instantiate されるかで、使用されるモ
デルが決まる。
このクラスは、操作モデル (観測モデル) に引数として渡されるべきである。操作を行
なうために、自律モデルが組めるようにある程度のメソッドを用意すべきである。
9.5.4 観測モデル
操作モデルである観測モデルは、内部操作としては座標変換とデータ型の変換が主な機
能となる。装置の仕様や対象に関するデータを適切に利用して、これらが保持する手続き
を順番に実行するように実装することとなる。
後述するように、アルゴリズムは Strategy パターンで、装置は Composite パターンで
実装される。部分的な性能評価のために一部装置をバイパスする場合は、装置クラスの中
でバイパスする実クラスを作ることとなるので、目的に併せて適切な装置および対象クラ
スの選択が必要となる。また、出力値も様々なので、目的に併せて出力オブジェクトを選
∗9
http://www-ti.informatik.uni-tuebingen.de/ ˜hutteman/Diplomarbeiten
9.5 設計
193
jslib
-successor
Coordinate
jasmine
observation
SatelliteCoordinate
InstrumentalCoordinate
ElectronicCoordinate
PixelData
Lb
Posision
0..*
Satellite
Attitude
PSF
Centroid
CatalogueData
Operation
DoAstrometry
Observation
Jasmine
+add( comp : Instrument )
OpticalSystem
+add( comp : Optics )
+getChild( index : int ) : Instrument
+getChild( index : int ) : Optics
+operation()
+operation()
+remove( comp : Instrument )
+remove( comp : Optics )
図 9.9: 観測モデルは、実際に操作を行なう複雑な部分である。観測クラスは装置と
観測対象を関連クラスとして持つ。装置と対象を表現するクラスは、観測を行なう
上で必要な適切なインターフェースを実装し、観測クラスはこれらのインターフェー
スを適切な順序で実行することにより、観測を模擬する。
択する必要がある。
入力値は、宇宙モデルの三次元点データ列と観測装置のモデルである。観測操作に必要
な座標変換は、観測装置のモデルの中で適切に実装されるべきである。さらにこのクラス
では、検出器上の二次元イメージ、ピクセルデータ、中心値の二次元データを扱う必要が
ある。アストロメトリカタログのデータは、三次元点データなので、データ型としては入
力値のものと同じ、別のオブジェクトを生成することになる。
ここで言っているイメージデータとは、離散化されていないイメージである。従って、
適切な関数を返却する以外に方法は無い。このデータ型が利用されるのは、光学系の干渉
パターンの解析や星像中心決定精度の評価など、限られた場合に限られる。このイメージ
の取り扱いにはコストがかかるため、多くの場合にはバイパスされるように設計すべきで
ある。
pixel データもバイパスして、星像中心データに直接変換される場合は、単純な座標変
194
第 9 章 JASMINE シミュレーター
換である。三次元座標値のオブジェクトを与えて、二次元座標値のオブジェクトを返却
すれば良い。装置のパラメータから射影規則が導出されれば、この手続きは単純である。
pixel データから星像中心を得る場合は、その手法を実装すべきである。
9.5.5 観測装置
観測装置は、大きく光学系と検出器に分けられる。光学系は、鏡あるいはレンズの組み
合わせであるが、鏡とレンズについては抽象化すべき性質はほぼ同じである。また、検出
器は CCD を用いる予定だが、数や組み合わせにおいて柔軟性を持たせる必要がある。
即ち、シミュレーターの観測装置を表現する部分では、一つあるいは複数の装置の組み
合わせを同様に扱う必要がある。個々の装置自身は、鏡や CCD といった単純なものであ
るが、これらの組み合わせ方は柔軟でなければならないし、仕様の検討を行なう段階では
その数も配置も不定である。そして、利用者側からは個々の装置の性能評価を行なう場合
もあるし、「観測装置」全体に関する性能評価が必要な場合もある。後者の場合であって
も、装置を一つのまとまりとして扱える方が現実的である。そこで、「JASMINE の観測
装置」とそれを構成する個別の CCD や鏡などの「装置」が部分全体階層をなすような、
図 E.22(下) のようなオブジェクト構造を容易に得られることが望ましい。
そこで、図 9.10 のようなクラス構造で実装する。親クラスとして「装置」を表す抽象
クラスを一つ用意する。サブクラスとしては、大きな部品の括りとして、光学系、検出
器、衛星 (図 9.12)、解析部分 (図 9.11) を実装する。これらを取りまとめ、実際にシミュ
レーションに利用される具象クラスは、JASMINE クラスとして Instrument クラスのサ
ブクラスとなる。
光学系も、いくつかのパーツの組合せから出来ている。これらの組合せによって、一つ
の特性を持った光学系が完成する。従って、Composite パターンを適用する Instrument
クラスの Leaf クラスとなる Optics クラスも一つの抽象クラスとして実装し、これが、ま
た鏡やレンズなどを表す Leaf クラスを持つ Composite パターンの Root クラスの役割を
持つ。検出器クラスの下部構造をここでは述べないが、やはり同様の構造を持つことにな
る。Composite パターンの適用は、部分の抽象物が親クラスになっているが、オブジェ
クト構造としては、図 E.22(下) のようなツリー構造を得ることができ、拡張性にも優れ
ている。また「装置」を表す抽象クラスへアクセスするようにプログラムしておけば、ツ
リーの構造によらず統一的な扱いが可能となる。このため、装置の組合せや数などツリー
の構造を変更した場合でも、ほかの多くの部分を変更する必要は無い。
装置は光学系と検出器の他、それに解析アルゴリズム、姿勢情報や観測モードを保持す
るための衛星モデルがある。
9.5 設計
195
name:int Instrument
jslib
number
InstrumentBuilder
Instrument
+buildPart() : void
+add( comp : Instrument )
-children
+getChild( index : int ) : Instrument
+operation()
limist:double
observe(interval),
0..*
coordinate
+remove( comp : Instrument )
transformation
observe(interval,SkyPatch)
Pointing(t):Coordinate ecl2Equ(u[]):double[]
jasmine
Pointing(t, CCD:int)
ecl2Gal
(u[]):double[]
-children
genericPointing(instPhase,)
instrument
0..*
t
Optics
JasmineBuilder
Satellite
Jasmine
+add( comp : Optics )
+add( comp : Instrument )
+getChild( index : int ) : Optics
+getChild( index : int ) : Instrument
+operation()
+operation()
+remove( comp : Optics )
+remove( comp : Instrument )
gaia2ins
vec2Sph
getConvex(t):Spatial
Convex
OpticalSystem
SimpleOptics
Mirror
Lens
getPole(t):Coordinate
+add( comp : Optics )
+getChild( index : int ) : Optics
for all c in
+operation()
children
getFOV():AM-FOV
in
Astro
c.operation()
+remove( comp : Optics )
}
図 9.10: 観測装置のクラス図。光学系と検出器それぞれについて Composite パター
ンを適用し、それぞれのアクションを順次行なって行く。
9.5.6 データ解析アルゴリズム
星像中心の時系列からアストロメトリーカタログデータを得る方法を実装する必要があ
る。この実装は、操作モデルからの利用形態を考えれば、装置クラスの中で実装するのが
自然である。これは、衛星の軌道と姿勢の情報から、視点の違いを考慮して、二次元座標
値の時系列から位置、距離、速度情報を割出す操作となる。
データ解析のアルゴリズムは、これから検討してゆく課題である。複数のアルゴリズム
を実装し、これらのアルゴリズムを比較検討する必要がある。このような場合、図 9.11
のようにアルゴリズムに相当する部分を一つの抽象クラスとして実装し、実際のアルゴリ
ズムはこの抽象クラスのサブクラスとして複数実装し、データを持っているオブジェクト
はアルゴリズムのオブジェクトを「持つ」ように実装すればよい。この方法は、strategy
パターンと呼ばれる。このとき、データオブジェクトはアルゴリズムの抽象クラスのオブ
ジェクトの持つメソッドのみをアクセスするように実装する必要がある。
196
第 9 章 JASMINE シミュレーター
jslib
Instrument
+add( comp : Instrument )
Operation
+getChild( index : int ) : Instrument
+operation()
+remove( comp : Instrument )
jasmine
observation
DoAstrometry
Algorithm1
Algorithm2
図 9.11: アルゴリズムのカプセル化には、通常 Strategy パターンが利用される。抽
象クラス DoAstrometry で必要なインターフェースを定義して、具体的なアルゴリ
ズムの実装はその具象サブクラスにまかされる。具象クラスを登録する機構を用意
することで、実行時にアルゴリズムを変更することも可能である。
動的に、あるいは静的であっても良く利用される複数の異なるアルゴリズムがあって比
較検討したい場合など、数値計算においても strategy パターンは有用である。
9.5.7 衛星モデル
装置には、装置同士を支える構造物なども含まれる可能性がある。熱・構造といった環
境モデルと観測精度の評価を行なう場合である。従って、具体的な装置だけでなく、一般
的な面や立体といった有限要素的な構造を取り扱うための拡張可能性に優れていることが
9.5 設計
197
jslib
Instrument
+add( comp : Instrument )
-children
+getChild( index : int ) : Instrument
0..*
+operation()
+remove( comp : Instrument )
jasmine
instrument
transport
Rocket
Detector
Optics
Jasmine
Satellite
+add( comp : Optics )
Attitude
+add( comp : Instrument )
+getChild( index : int ) : Optics+getChild( index : int ) : Instrument
+operation()
+operation()
+remove( comp : Optics )
+remove( comp : Instrument )
universe
for all c in
AstroObject
childlen{
c.operatoin()
+add( comp : AstroObject )
}
+getChild( index : int ) : AstroObject
PixelData
+getPositoin()
+remove( comp : AstroObject )
図 9.12: 衛星モデルは、装置モデルのサブクラスとして実装されるのが適切である。
熱環境や姿勢情報などを保持し、座標変換のために適切に利用される。
要求される。これは、環境モデルとして実装されるが、環境モデルと装置モデルの関係
は Decorator パターンとして実装される。Decorator パターンは退化した Composite パ
ターンと見なすことが出来るので、Composite パターンの Jasmine クラスのなかで、メ
ソッドを適切に定義することで、Decorator パターンを実現可能である。
Composite パターンの生成には、しばしば Builder パターンが利用される。
9.5.8 座標変換
衛星計画においては、宇宙に固定された座標の他、衛星とともに動く座標、検出器面で
の座標など、いろいろな座標系を使う必要がある。これは、装置モデルの中で実装される
のが自然である。
宇宙モデルの座標系としては、サイエンスの上では銀経銀緯が最も適している。しかし、
太陽系重心座標を用いても、銀河系座標とは平行移動だけなので、どちらを利用しても利
198
第 9 章 JASMINE シミュレーター
便性の面ではあまり変わらない。装置モデルにパラメーターとして渡される AstroObject
の座標は、太陽系重心座標で記述される。これに、装置に乗った座標、検出器面での座標
などを、適切に変換する方法、そして最終的にサイエンスの解析に用いるために、変換さ
れた座標系をもとに戻す方法が提供されるべきである。
GAIA では、SnapShot クラスから生データを生成する実装に関する記述から、以下の
ように順次座標変換を行なっている。
1. まず基本となるデータが Barycentric(太陽系重心座標) で与えられる。Sun-Earth L2
点を観測点とするため、Geocentric や Heliocentric より Barycentric が適している
と判断したものと思われる。ただし、宇宙モデルを考える場合、Galactic coordinate
が良い場合もある。
2. 衛星の重心座標のデータから Satellite 系へ変換する。
3. 衛星の姿勢情報 (Attitude model と呼ばれる) から Instrument 系へ変換する。
4. CCD の位置や焦点面などの情報 (Geometric model と呼ばれる) から Electronic
reference system へ変換する。
この機構を、クラス図 9.10 では GetFOV メソッドに持たせている。最初は必要になるた
びに順次メソッドを呼び出す方式で実装するが、動作速度に問題を生じた場合は、適切な
キャッシング機構を利用する必要があるかも知れない。
9.5.9 観測データに含まれる誤差およびバイアスの要因
観測データには、様々な誤差が含まれる。最終的には全ての誤差を考慮しなければなら
ないのだが、シミュレーションを行なうにあたり、個別の誤差の要因の比率などをチェッ
クする必要がある。このために、誤差を要因毎に個別に与える必要がある。また、検討の
結果新たな誤差要因がを考慮する必要が生じた場合に、動的に要因を追加することが容易
でなければならない。そこで、一般的に誤差を表す抽象クラスの下に個別の誤差を表現す
る具象クラスを用意する。こうすることで、誤差を動的に追加することが可能で、また誤
差要因毎の評価を個別に行なうことを可能にする。
誤差だけでなく、10µ 秒角という精度は未経験の分野であり、前述した相対論的補正
(§7.4) のように、今までの位置天文学観測で考慮する必要が無かった新たな補正要因が考
えられる。設計段階において、そういった補正要因が容易に追加できるようなプログラム
の構造をとっておくことは重要である。そこで、Decorator パターンと呼ばれるパターン
を適用する。クラス図を図 9.13 に示す。
一般の科学シミュレーションにおいても、状況によっていくつかの違った種類の付加的
な属性を持たせるような場合で、付加的属性の組合せがオブジェクトによりことなる、あ
9.5 設計
199
jasmine
instrument
Optics
+add( comp : Optics )
-component
1
+getChild( index : int ) : Optics
+operation()
+remove( comp : Optics )
SimpleOptics
Mirror
Lens
OpticalError
+add( comp : Optics )
+getChild( index : int ) : Optics
+operation()
+OpticalError( comp : Optics )
+remove( comp : Optics )
MirrorAngle
+MirrorAngle( comp : Optics )
図 9.13: 誤差は、付加的属性として取り扱うのが適当である。このような取扱には、
Decorator パターンが適している。
るいは計算途上で動的に変化するような場合、このパターンが利用できる。
シミュレーション等の数値計算においても、手続きがいくつかの単純な手続きに分解可
能で、その組合せ方が場合によって変化するような場合に、このパターンを利用できる。
9.5.10 熱・構造解析
外部リソースが使用される可能性が高いので、Adapter パターンあるいは Bridge パ
ターン が有効であると推察される。
9.5.11 データベースモデル
JASMINE では、最終的には約 10 億程度の星の点データに対して、それぞれ 100 以上
のオーダーの観測点を持つことになる。即ち、1000 億から 1 兆のフィールドを持つデー
タベースをリダクションして、10 億のフィールドを持つデータベースに変換する作業が
200
第 9 章 JASMINE シミュレーター
必要となる。銀行の預金データベースは巨大なデータベースの代表例として良く語られ
る。日本の人口が 1 億 4 千万、銀行で合算せずに入金・出金のデータを保持してくれるの
は通帳の見開き 1 ページ分程度、約 20 件程度であるから、銀行の預金口座データベース
もせいぜい数十億フィールド程度を保持しているものと想定される (これは企業秘密なの
で、我々が知ることは出来ない、あくまでも推測である)。JASMINE が扱うべきデータ
ベースは、この規模をはるかに越えるデータベースとなる。
独自にデータベースシステムを開発することは、我々のテーマをはるかに越える問題で
あり、また時間的にも無理がある。また、解析には 2 年程度かけてよいので、銀行のシス
テムほど高速なデータ処理は必要無い。そこで、従来のデータベース技術を用いて、適切
な分散処理により、必要な時間内にデータを処理する方法を確立する方法をとるべきであ
る。データベース技術としては、通常のリレーショナルデータベースで良い。オブジェク
トデータベースという研究もあるが、あまり成功しているようには思われないし、少なく
とも位置天文データは単純なので、オブジェクトデータベースを持ち出すまでもない。
リレーショナルデータベースは、SQL という標準言語があり、Java では JDBC により
アクセス可能である。
9.5.12 サイエンス
サイエンスの上でのカタログデータの利用は、今までにメンバーの中で検討されてきた
サイエンスの上での課題、あるいは既にほかの研究者が論文として発表しているもののな
かから、適切なものを選択して実装する。
9.6 動作例
図 9.14 に、JASMINE シミュレータープロトタイプの動作例を示す。計算すべき量を
得るのに必要なパラメータは、Slider や ComboBox などの GUI 部品から入力可能にす
る。簡単に計算が完了するようなものについては、入力部品のイベントを受け取って、結
果をすぐに表示画面に反映するようにする。
入力部品は、モデルが必要とする入力値の性質や入力方法を通知することにより、適切
に選択される。入力値の性質として、入力値が単なる数値である場合は、文字列・整数・
実数の別、可能な文字列の種類や数値の最大値・最小値などがあげられる。また、実数値
の場合、対数スケールでの入力が好ましい場合があるので、適宜選択される必要がある。
また、ファイルからある種のデータを入力、出力する場合があり得る。例えば二次元三
次元のテーブルが入力値として割り当てられる場合、FITS などの形式の定まったフォー
マットデータが割り当てられる場合、有限要素データが割り当てられる場合などがある。
9.6 動作例
201
図 9.14: JASMINE シミュレーターの動作例1
この場合、GUI 部品としてはファイル名を示す文字列の入力で良いが、モデルに体する
入力という観点から見れば、適切にデータが解釈される必要がある。
出力に関しては、図 9.14 に示すように単に数値を得たい場合もあるが、図 9.15 のよう
にグラフを表示したい場合、複雑な図を表示したい場合などに、適切に対応できる必要が
ある
シミュレーションを行なうべき内容は、多岐に渡る。そこで、適当なモデルを構築し、
これらを組み合わせることにより、シミュレーションを簡単に組み上げられる機構が必要
である。このため、JASMINE シミュレーターではモデル編集機能 (モデラ) を実装する
予定である。編集機能で実現モデルを選択し、モデル同士のデータフローを編集画面の上
で構築すれば、適切な GUI 部品が接続され、図 9.14 に示すような動作を開始するような
ものが必要である。
JASMINE シミュレーターに必要な個別のモデルは、編集画面の横に用意されたアイコ
ンを編集画面の上に移動することで、シミュレーションに組み込まれる。実装は prototype
が適切であろう。データフローを司る線部品は、抽象化された最上位の線部品を接続す
れば、モデル部品の要求を解釈して Abstract Factory で具象クラス構築するのが、ユー
ザーフレンドリーな設計である。
なお、このような抽象化を行なう場合、データ通信部分の構築に対する制限を予め考慮
する必要がある。データ通信の一部は CORBA での実装になるので、予め CORBA の仕
202
第 9 章 JASMINE シミュレーター
図 9.15: JASMINE シミュレーターの動作例2
様を検討した上でデータ通信部分の仕様を絞り込む必要がある。
9.7 補足
JASMINE では、jasmine-galaxy.org というドメインを取得している。cvs サーバーは
cvs.jasmine-galaxy.org で、web サーバーは www.jasmine-galaxy.org でアクセス可能で
ある。
9.7 補足
203
Model1
Model2
Analyze1
Analyze2
Model3
Analyze3
Compute
Collect
Image
図 9.16: JASMINE シミュレーターの編集機能。宇宙や装置、解析などに関する個
別のモデル同士のデータフローを、編集画面の上で線で接続することで、シミュレー
ションを構築する。最終的に、結果を集めて表示する。
205
第 10 章
今までの経緯と今後のスケジュー
ル、マイルストーン
この章の目次
10.1
10.2
今までの経緯 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Mini-JASMINE 計画について . . . . . . . . . .
10.2.1 スペースでの実証の必要性 . . . . . . . . . . .
10.2.2 超小型衛星 (CubeSat) について . . . . . . . .
10.2.3 Mini-JASMINE 計画の概要 . . . . . . . . . .
10.3 今後のスケジュールとマイルストーン . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
206
206
207
208
209
今まで JASMINE 計画について述べてきたが、この計画に関しての今までの経緯と今
後予定しているスケジュールについて説明しておきたい。特にスケジュールの節目である
マイルストーンの予定を以下で述べる。
10.1 今までの経緯
JASMINE 計画は、現在、国立天文台を中心とし、宇宙科学研究所や大学の研究者の協
力のもとに進められているが (§12 参照)、以下のような経緯で計画が起こり、また、現在
進行中である。
○平成 9 年:国立天文台第三者評価委員会による検討推進勧告を次のように受けた(国立
天文台のホームページ内を参照。http://www.nao.ac.jp/ReportJ/index230.html):ヒッ
パルコスの成果を踏まえて位置天文学の将来を見据えたとき、遠方のクェーサーに準拠し
た銀河スケールでの位置天文を進めるのが肝要だと考えられる。それには、スペースアス
トロメトリー計画が最も近道であり実現性も高いと考えられるので、その実現の可能性を
真剣に検討すべきであろう。
206
第 10 章 今までの経緯と今後のスケジュール、マイルストーン
○平成 11 年度:国立天文台を中心として、宇宙科学研究所スタッフの協力の下、有志に
よるスペースアストロメトリ勉強会を開始。その後、現在の JAMSMINE 勉強会に発展
し、さらにいくつかの勉強会、ワーキンググループも誕生し、検討が進められている (§
12 参照)。
○平成 13 年度:国立天文台将来計画委員会のもとに設置された台内外の研究者 50 名
(2003 年 3 月 1 日時点)をメンバーとする、位置天文観測衛星ワーキンググループが
発足。
○平成 13,14 年度:位置天文観測衛星ワーキンググループの会合を定期的に行い、検討方
針などの意見をもらっている。
○平成 13 年度:国立天文台光赤外線天文学専門委員会で、JASMINE 計画のレビューを
行い、検討を推進することに対して奨励された。
○平成 12,13,14 年度:宇宙科学研究所における宇宙科学シンポジウムにおいて、将来計画
として JASMINE 計画の紹介を行ってきた。
○平成 13,14 年度:国立天文台将来計画委員会主催の将来計画シンポジウムにて、JAS-
MINE の検討状況を報告し、検討課題などの意見をもらっている。
○平成 14 年度:国内における光赤外線天文学研究者のコミュニティ組織である光天連主催
のシンポジウムにて、JASMINE 計画の紹介を行い、意義を認識してきてもらっている。
○その他:天文学会や京都大学、大阪大学、ぐんま天文台などの談話会を通じて、随時
JASMINE 計画の紹介を行っている。国際会議にもいくつか参加し講演を行ってきてい
る (GAIA の会議での口頭発表 (2001)[Gouda et al., 2002b]、変光星の国際会議での招待
講演 (2002)[Gouda et al., 2002a]、IAU regional meeting(2002)[Gouda et al., 2003b]、
SPIE(2002)[Gouda et al., 2003a] での発表)。
10.2 Mini-JASMINE 計画について
10.2.1 スペースでの実証の必要性
JASMINE 計画自体は、前述したような経緯のもと、前章までに詳細に説明したような
計画検討が多くの方のご支援、ご協力のもと、順調に進んできている。ただ、多くの方法
論的および技術的な課題があり、解析的、およびシミュレータでの検討とともに開発、実
証を進めていかなくてはいけない。例えば、期待しているような精度を本当に達成できる
のか、考えられうるすべての検討項目を当たっていかなくてはいけない。地上で、実際の
CCD 検出器を用いて、星像中心決定の実験を行っているのもその検証の1つである。こ
のように、地上で可能なことは実証を行っていくが、実際の宇宙環境条件での実証も重要
である。しかし、地上で宇宙環境を忠実に再現することは困難が多い。可能ならば、実際
10.2 Mini-JASMINE 計画について
207
のスペースでの実験、実証が可能ならばそれに越したことはない。また、スペースアスト
ロメトリは、日本においては初めての経験であり、今までのノウハウの蓄積は皆無に等し
い状況から、JASMINE の検討が始まっている現状である。その点から言っても、本番前
に、実際のスペースで重要な点を検証できることが可能であれば、大変望ましいことであ
る。さらに、言うと、JASMINE で採用しようと計画している、TDI モードを稼働して、
グローバルなアストロメトリ観測をスペースで行うこと自体が、世界ではまだ実現してい
ない。確かに、ヒッパルコス衛星においては、大角度離れた視野を同時に観測し、絶対的
な年周視差の情報を得るというスペースでのグローバルアストロメトリの観測手法は(1
ミリ秒角の精度では)実証されている。しかし、ヒッパルコス衛星では、CCD を用いて
はおらず、光電管による検出である。DIVA、FAME が中止となった現時点では、GAIA
や JASMINE までは、実際のスペースで、TDI モードを稼働して、グローバルなアスト
ロメトリ観測は行われない。つまり、今のところ、そのときまで実証も行われる予定がな
い。さらに、JASMINE はヒッパルコスや GAIA とは違って、全天サーベイを行うので
はなく、部分的なサーベイを行う。この点では独自の実証も必要である。
以上述べたように、本番前に、スペースでのいくつかの課題に関しての実証は強く望ま
れる。その方法の1つとして、JASMINE よりも小型で目的を特化した、小型衛星によ
る実証が挙げられる。しかし、小型衛星といえども (50cm 立方程度、重さ 50kg∼100kg
程度)、予算的なことやリスク、その小型衛星開発に費やせるマンパワーなどを考慮す
るとその実現はたやすくはない。ところが、最近、超小型衛星 (pico-satellite) と呼ばれ
る、大きさは 10cm∼20cm 程度、重さは、1kg∼ 数 kg 程度の衛星が開発されてきてい
る。そこで、我々としては、この超小型衛星を用いた、技術的実証を大きな目的とした
Mini-JASMINE 計画の検討を始めている。そこで先ず、次小節で、超小型衛星に関して、
簡単に説明を行う。
10.2.2 超小型衛星 (CubeSat) について
10cm∼20cm 立方のサイズで重さが 1kg∼数 kg 程度の超小型衛星 (pico-Satellite) と
呼ばれる超小型衛星開発が進展してきている。CubeSat プロジェクトは、このような超
小型衛星を地球周回軌道上に打ち上げ、運用することを目的としたプロジェクトである。
日本では、東大をはじめ東工大などいくつかの大学で開発が進められている。東大と東工
大は、各々、2003 年 6 月 30 日に 1 号機を無事に打ち上げた。CubeSat は、短期間での
開発、打ち上げ、運用を可能とし、また低コスト(打ち上げ費用は、衛星1 kg 当たり約
100 万円)で実現可能である。打ち上げは、フェアリングの中の大型衛星のすきまに複数
の超小型衛星を設置し、打ち上げる。CubeSat 1号機の打ち上げは EUROCKOT 社のロ
ケット EUCROCKOT を使用し、ロシアから打ち上げられた。軌道を選ばなければ、年
208
第 10 章 今までの経緯と今後のスケジュール、マイルストーン
に2回程度の打ち上げ機会はある。
CubeSat は以上のような特徴があるため、CubSate の大きな目的の1つは、教育目
的であり、学生が衛星プロジェクトのすべて(ミッションの構想、シナリオ、設計、製
作、試験、打ち上げ、運用)を経験できる。また、技術的実証、衛星の設計・制作をと
した技術・知識の獲得等も大きな目的である。さらには、新規分野の衛星計画参入のし
きいを下げるという利点もある。東京大学工学部の中須賀研究室では、前述したように
CubeSatXI-IV(1号機)を 2003 年 6 月 30 日にロシアから打ち上げ、成功をおさめたが
(http://www.space.t.u-tokyo.ac.jp/cubesat/general/index.html)、この衛星は、学生の
教育、超小型衛星バスシステムの機能実証および民生品(宇宙用ではない部品)の動作実
証を目的としている。また、中須賀研究室では、CubeSat 1号機によるバス機能をベース
にし、さらなる高性能化を目指し、CubeSatII を開発中である。CubeSatII は、15cm 立
方と CubeSat 1号機よりやや大型化し、バス機器に加えて地球の光学観測用のミッショ
ン機器を搭載する。打ち上げは 2004 年春以降を目指している。
10.2.3 Mini-JASMINE 計画の概要
前 述 し た よ う に 、JASMINE も 本 番 前 に で き る だ け ス ペ ー ス で の 実 証 、技 術・
知識の獲得を行って いきたいと考えている。そこで、東京大学工学部中須賀研究室
(http://www.space.t.u-tokyo.ac.jp/)との協力のもと、技術的実証を主な目的とし、ま
た可能ならば、明るい少数の星に対してのみとなるが、ヒッパルコスの観測精度を若干上
回る世界最高精度での観測を目的とし、CubeSatII クラスを用いた Mini-JASMINE 計画
を推進、検討していくこととなった。打ち上げは今後 2∼3 年後を目標とする。
Mini-JASMINE の仕様としては、例えば以下のようなものをたたき台案として考えて
いる。
検出器は、1024 × 1024pixels の z-band(0.9 ミクロン)に感度のピークがある、CCD
を想定。1pixel のサイズは、15 ミクロン。
○ CubeSatII クラスのもの
○位置天文精度 640 μ as@z=7 等級(photon noise のみで決まる理想的精度)
○光学系(望遠鏡)
○口径 5cm の反射望遠鏡(Korsh 系)
○(合成)焦点距離:1.67m
○検出器の並べ方と個数:よこ(scan 方向)1個、たて1個、合計1個
○ 衛星の spin 周期:0.594 時間
○衛星の歳差周期:4.12 日
○積分時間(1つの検出器を星が横切る時間)
:3.1 秒
10.3 今後のスケジュールとマイルストーン
209
○1つの星に対する1年間当たりの観測回数:709 回
今後、上記のたたき台案をもとに、中須賀研究室とも密接な検討を行い、仕様を固め、
設計、試作、実際の打ち上げ、運用までを進めて行く予定である。
10.3 今後のスケジュールとマイルストーン
次に今後のスケジュールとマイルストーンを以下にまとめる。もちろん、これは現在、
目標としているスケジュールで今後の変更がありうることはご注意願いたい。 210
第 10 章 今までの経緯と今後のスケジュール、マイルストーン
年度
項目
2003
審査など
国立天文台光赤外専門委員会での
レビューを申請
新宇宙機関 (JAXA) の理学委員会
へ WG 設置を申請
phaseA(概念設計)
(国立天文台 A プロジェクト室設
置申請)
∼ 2006
phaseB(予備設計、基本設計)
予備設計審査
基本設計審査
Mini-JASMINE の打ち上げ、運用 2008
衛星計画の承認(目標)
新宇宙機関でのミッション提案、審
査 (国立天文台 B プロジェクト室設
置申請)
2009
phaseC(詳細設計) 詳細設計審査 phaseD(制作、試験) 試験後審査 2012
2013
打ち上げ (目標) (国立天文台 C プロジェクト室設
置申請)
5年間のミッション
2018
データ解析
2020
データ公開 表 10.1: JASMINE 計画の今後のスケジュールとマイルストーン
211
第 11 章
予算概要
★予算状況について
JASMINE 計画に関連して、現在までに獲得した予算について以下に記述する。
◎平成 12 年度∼14 年度の補助金等に関して
○平成 12 年度∼13 年度 文科省科学研究費基盤研究 (C)
「高精度位置天文観測で開く宇宙物理学」(辻本拓司代表、郷田直輝分担):240 万円
今後の高精度位置天文観測で拓くサイエンスの検討を行った。
○平成 13 年度∼14 年度 文科省科学研究費基盤研究 (C)
「高精度アストロメトリ観測で解き明かす銀河の構造と形成」(郷田直輝代表):180 万円
JASMINE で拓くサイエンスおよび JASMINE の基礎的な検討を行った。
○平成 14 年度∼17 年度 文科省科学研究費基盤研究 (A)
「新動作モードに対応した赤外線アレイ検出器の開発」(小林行泰代表、郷田直輝分担)
:
4270 万円 K-band での TDI モード可能な赤外線アレイ検出器の開発を行っている。
○平成13年度と14年度 国立天文台研究推進経費
CCD を用いた星像中心決定の実験(月面天測望遠鏡 (ILOM) 計画チームと共同)
:
合計 1460 万円
7.2.2 節で説明したように、実験を行い、一定の成果をおさめてきているが、さらに高
精度達成を目指して続行中である。
○平成1 4 年度 国立天文台光赤外系・位置力系合同系留め置き金(研究推進経費)
JASMINE シミュレーターの構築(郷田直輝代表)
合計 100 万円
◎今後について
○平成15年度 東レ科学技術研究助成金
212
第 11 章 予算概要
「銀河系とは何か?」(郷田直輝代表)
:合計 1000 万円
一部を、JASMINE に関連して、主に JASMINE シミュレーター構築のために使用
予定。
○平成15年度∼17年度 文科省科学研究費基盤研究 (B)
「近赤外線高精度位置天文観測のための新手法の研究」(郷田直輝代表、山田良透他
JASMINE メンバーが研究分担者)
:1620 万円 主に JASMINE シミュレーター構築、観測装置などのモデル化のための開発、試作な
どに使用予定。
○平成15年度 国立天文台研究推進経費
:300 万円 「JASMINE プロジェクト」(郷田直輝代表)
主に焦点面での CCD 配置に関する開発や本検討報告書の制作費などに使用。
○平成15年度 国立天文台光赤外系・位置力系合同系留め置き金(研究推進経費)
JASMINE シミュレーター構築(矢野太平代表)
:19 万円
213
第 12 章
体制の現状
先ず、下記のような定期的な勉強会や実際の検討、開発を行っていくいくつかのワーキ
ンググループ (WG) を設置している。現在のメンバーは以下の通りであるが、ご興味の
あるかたの参加は大いに歓迎である。また、現在は、JASMINE 計画は多くの協力者はあ
るものの、計画に専念できるスタッフ(1名)とポスドク研究員(平成 15 年度より国立
天文台科学研究員 1 名)はごく少数である。メンバーの充実化をはかる努力も今後は必要
である。
■ワーキンググループメンバー
図 12.1: JASMINE 組織表
214
第 12 章 体制の現状
1.JASMINE 推進グループ
3. サイエンス WG
銀河系力学モデル勉強会
4.JASMINE Simulator WG
5.Simulator System
JASMINE Simulator 検討会
構築 sub-WG
6.Virtual
Galaxy
アストロメトリ勉強会
sub-WG
7. アストロメトリ観
YG
測手法 sub-WG
相談
8.centroid 決定アル
スペース天文研究会
会
ゴリズム sub-WG
9.centroid 実験 WG
10. 光学系・検出器 WG
JASMINE 勉強会
11. 衛星システム WG
NASDA 技術研究本部との検討会
ISAS との相談会
12.Mini-JAMSMIE 推
Mini-JASMINE 検討会
進 WG
2. 国立天文台将来計画委員
アストロメトリ衛星 WG 会合および
会アストロメトリ衛星 WG
JASMINE ワークショップ
13. 光赤外天文学将来計画
スペース班検討会、全体検討会
検討会 (スペース班)
表 12.1: JASMINE 組織と WG
サイエンス (力学構造)WG 郷田直輝、矢野太平、官谷幸利、上田晴彦(秋田大)、上田誠
治 (総研大)、松林達史(東工大)、小山博子、辻本拓司
Simulator 構築 sub-WG 山田良透 (京大)、上田誠治 (総研大)、桑原 立 (新潟大)、
協力メンバー: 西亮一 (新潟大)、矢野太平、官谷幸利、郷田直輝
Virtual Galaxy sub-WG 上田誠治 (総研大)、官谷幸利、辻本拓司、矢野太平、郷田直輝
アストロメトリ観測手法 sub-WG
矢野太平、郷田直輝、山田良透 (京大)、辻本拓司
協力メンバー: 官谷幸利、笹尾哲夫 (亜州大)、真鍋盛二
centroid 決定アルゴリズム WG 矢野太平、郷田直輝、安田直樹、大越克也 (電通大)
協力メンバー: 山田良透 (京大)、小林行泰、辻本拓司
centroid 実験 WG * 2001 年 6 月に開始。CCD の TDI モードを用いて、実際の星像中
心決定の実験を行う。SELENE2 での月面天測望遠鏡 (ILOM) 計画に直接関連して
215
いるため、ILOM チームと共同。矢野太平、小林行泰、郷田直輝、、山田良透(京
大)、中島 紀、辻本拓司、官谷幸利+ ILOM グループ(荒木、花田、鶴田、田澤、
浅利、河野 etc.)(国立天文台)
光学系・検出器 WG
小林行泰、矢野太平、宮崎 聡 (ハワイ観測所)、高遠尚徳 (ハワイ
観測所)、中島 紀、松原英雄 (宇宙研)、上野宗孝 (東大)、郷田直輝
衛星システム WG
松原英雄(宇宙研)、井上一(宇宙研)、野田篤司(宇宙開発事業団)、
對木淳夫(宇宙開発事業団)、上田裕子(宇宙開発事業団)、小川 亮 (宇宙開発事業
団)、郷田直輝、矢野太平、小林行泰、山田良透 (京大)、中島 紀、辻本拓司、上田
誠治 (総研大)
協力メンバー: 、澤井秀次郎、山川 宏、橋本樹明、峯杉賢治、小川博之(以上宇
宙研)
Mini-JASMINE WG 郷田直輝、矢野太平、小林行泰、松原英雄 (宇宙研)、山田良透 (京
大)、中島 紀、辻本拓司、上田誠治 (総研大)、中須賀真一 (東大)、中須賀研+町田
研メンバー (東大)
アストロメトリ衛星 WG
(2003 年 5 月 20 日現在)56 名、メンバー参加を歓迎します。
*年に1,2回、会合を開き、JASMINE に関する検討、意見交換を行う。
国立天文台:
○位置天文・天体力学研究系:
郷田直輝、辻本拓司、矢野太平、上田誠治
○光学赤外線天文学観測システム研究系:
中島 紀、高遠徳尚、家 正則、安藤裕康、田村元秀、山田 亨
○天文機器開発実験センター: 小林行泰、越田進太郎
○ハワイ観測所:宮崎 聡、唐牛 宏
○天文学データ解析計算センター: 安田直樹、榎基宏
○電波天文学研究系: 井上 允 ○地球回転研究系 (RISE): 河野宣之、日置幸介、花田英夫
○地球回転研究系 (VERA): 真鍋盛二、本間希樹、官谷幸利
○理論天文学研究系:児玉忠恭
宇宙科学研究所: 松原英雄、澤井秀次郎、井上 一、満田和久、平林 久
NASDA: 岩田隆浩
弘前大: 浅田秀樹
東北大: 土佐 誠、千葉柾司
ぐんま天文台: 奥田治之
放送大学: 宮本昌典
通総研: 細川瑞彦
216
第 12 章 体制の現状
東大: 上野宗孝、岡村正矩、吉井 譲、中田好一、尾中 敬、牧野淳一郎、小林尚人
理研: 戎崎俊一
電通大: 大越克也
新潟大: 西 亮一
名大: 芝井 広、長田哲也
長野高専: 大西浩次
京大: 山田良透、舞原俊憲、稲垣省五、釜谷秀幸、高橋労太
鹿児島大: 面高敏宏
亜州大学 (韓国): 笹尾哲夫
■勉強会・検討会等
JASMINE 勉強会 1999 年 6 月に開始。全 WG の報告および全体の検討を行なう。月一
回程度開催。
郷田直輝、小林行泰、矢野太平、中島 紀、辻本拓司、松原英雄(宇宙研)、上田誠
治 (総研大)、越田進太郎(東大)、官谷幸利、山田良透(京大)、上野宗孝(東大)
アストロメトリ勉強会 2001 年 2 月に開始。模擬銀河系モデルや観測手法の検討など、
月に一回程度。
郷田直輝、矢野太平、辻本拓司、上田誠治(総研大)、安田直樹、官谷幸利、山田良
透、大越克也(電通大)、真鍋盛二、笹尾哲夫(亜州大)
銀河系力学モデル勉強会 (G-ゼミ)
2000 年に開始。約1ヶ月に1度の割合。高精度アス
トロメトリデータが得られた場合の銀河系の力学モデル構築方法の検討、銀河系力学
に関係するサイエンスの検討。いずれ、VERA グループとの共同にもする予定。
郷田直輝、矢野太平、官谷幸利、上田晴彦 (秋田大)、上田誠治(総研大)、松林達史
(東工大)、小山博子
JASMINE Simulator 検討会 JASMINE Simulator に関わる全体の検討、ソフト開発な
ど、月に一回程度。
山田良透 (京大)、上田誠治(総研大)、桑原 立 (新潟大)、西亮一 (新潟大)、矢野太
平、官谷幸利、郷田直輝
YG 相談会 観測手法、光学系、centroid 決定方法の検討、衛星システムの検討、週に一
回程度
矢野太平、郷田直輝
スペース天文研究会 2001 年4月から発足。約2ヶ月に1度の割合。JASMINE チーム
と月面天測望遠鏡 (ILOM) 計画チーム、RISE、SELENE 計画チームとのスペース
関係の合同勉強会、計画や実証実験の検討、共同研究や共通の技術開発などを協力し
217
て行う。メンバーは主に国立天文台、宇宙研、 NASDA、岩手大など。
郷田直輝、矢野太平、小林行泰、越田進太郎(東大)、辻本拓司、中島 紀、松原英雄
(宇宙研)、山田良透(京大)、上田誠治(総研大)+ SELENE グループ (河野、日置、
花田、坪川、荒木、鶴田、田澤、浅利他 (国立天文台)、岩田隆浩、青木 (NASDA))、
磯部 (国立天文台)etc.
アストロメトリ衛星 WG 会合および JASMINE ワークショップ
JASMINE の現状報告、
今後の進め方の議論、サイエンスの研究会など。年一回程度。
NASDA 技術研究本部との検討会 2003 年 4 月に開始。月に一回程度。
ISAS との相談会 * 2001 年 6 月に開始。まだ、不定期。
Mini-JASMINE 検討会 中須賀研究室との超小型衛星 (CubeSat) による Mini-JASMINE
計画の検討、開発。今後は定期的に行なう予定。
スペース班検討会、全体検討会
約 10 年以後の日本の光赤外天文学の計画を検討。サイ
エンス、地上観測、スペース班がある。随時。
218
第 12 章 体制の現状
サイエンス WG
Simulator System sub-WG
Virtual Galaxy sub-WG
アストロメ トリ観測手 法
JASMINE
Simulator
WG
sub-WG
Centroid 決定アルゴ
リズム sub-WG
Centroid 実験 WG
光学系検出器 WG
衛星システム WG
Mini-JASMINE 推進 WG
コアメンバー
郷田 直輝
○
△
○
○
○
○
○
○
○
国立天文台
矢野 太平
○
△
○
○
○
○
○
○
○
国立天文台
△
○
○
○
○
国立天文台
△
○
○
○
国立天文台
○
○
国立天文台
小林 行泰
辻本 拓司
○
○
○
中島 紀
○
官谷 幸利
○
△
○
上田 誠治
○
○
○
△
○
○
松原 英雄
国立天文台
○
山田 良透
○
○
△
○
○
○
総合研究大学院大学
○
○
宇宙科学研究所
○
○
京都大学
協力メンバー
宮崎 聡
○
国立天文台
高遠 尚徳
○
国立天文台
安田 直樹
○
上野 宗孝
小山 博子
国立天文台
○
○
東京大学
国立天文台
笹尾 哲夫
△
国立天文台
真鍋 盛二
△
国立天文台
上田 晴彦
○
秋田大学
大越 克也
○
東京大学
越田 進太郎
松林 達史
東京大学
○
○
東京工業大学
西 亮一
△
新潟大学
桑原 立
○
新潟大学
表 12.2: ワーキンググループ組織表。また、星像中心決定実験グループは国立天文
台の ILOM グループ (河野、花田、荒木、鶴田、田澤、浅利、日置、坪川各氏他) と
の共同である。
219
JASMINE 勉強会
アストロメトリ勉強会
銀河力学モデル勉強会
JASMINE Simulator 検討会
YG 相談会
スペース天文研究会
ISAS との相談会
NASDA との検討会
Mini-JASMINE 検討会
コアメンバー
郷田 直輝
○
○
○
○
○
○
○
○
○
国立天文台
矢野 太平
○
○
○
○
○
○
○
○
○
国立天文台
小林 行泰
○
○
○
○
○
国立天文台
辻本 拓司
○
○
○
○
○
国立天文台
中島 紀
○
○
○
○
○
国立天文台
官谷 幸利
○
○
○
○
上田 誠治
○
○
○
○
松原 英雄
○
山田 良透
○
○
○
○
国立天文台
○
○
○
○
総合研究大学院大学
○
○
○
○
宇宙科学研究所
○
○
○
○
京都大学
協力メンバー
宮崎 聡
国立天文台
高遠 尚徳
国立天文台
安田 直樹
上野 宗孝
○
国立天文台
○
東京大学
小山 博子
○
国立天文台
笹尾 哲夫
○
国立天文台
真鍋 盛二
○
国立天文台
上田 晴彦
○
大越 克也
越田 進太郎
秋田大学
○
東京大学
○
松林 達史
○
○
東京大学
東京工業大学
西 亮一
○
新潟大学
桑原 立
○
新潟大学
表 12.3: 勉強会の組織表。ISAS との相談会は宇宙科学研の澤井 秀次郎、山川 宏、
橋本 樹明、峯杉 賢治、小川 博之各氏に、NASDA との検討会は NASDA の野田篤
司、對木淳夫、上田裕子、小川亮各氏に、Mini-JASMINE 検討会は東大工学部の中
須賀真一氏、中須賀研および町田研の大学院生、学部学生の方々にオブザーバー参
加していただいている。
221
第 13 章
Summary
この章の目次
13.1
13.2
13.3
JASMINE のまとめ . . . . . . . . . . . . . . . . . . . . . . . 221
今後について . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
謝辞 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
13.1 JASMINE のまとめ
JASMIEN に関して、その概要、JASMINE で開けるサイエンス、仕様(望遠鏡、検出
器など)、衛星仕様、精度評価、データ解析、シミュレーターなどについて説明を行って
きた。JASMINE の主な仕様等に関しては、あらためて表 13.1 にまとめておく。
13.2 今後について
今後は、このレポートに記載した検討課題を中心にさらに検討、基礎開発、実験等を精
力的に行っていきたいと思っている。なるべく、スケジュール通りの過程を経て、実現に
一歩一歩向かっていきたいと考えている。必要な予算の獲得、メンバーの増強なども努力
していきたい。今後も、皆様からのアドバイス、辛辣なご意見が非常に重要である。是
非、今後ともご支援、ご協力をよろしくお願いする次第である。
222
第 13 章
Summary
13.3 謝辞
この検討報告書を作成するにあたり、いつもご支援、ご意見をいただいているアストロ
メトリ衛星ワーキンググループの皆様に感謝いたします。また、2003 年 3 月に開催した
JASMINE ワークショップのサイエンス部門で講演していただき、本報告書の第3章の執
筆を分担していただいた、JASMINE メンバー以外の講演者の方(3.2.4 の出田 誠さん、
3.2.5 の牧野淳一郎さん、3.3.1 の西 亮一さん、3.3.2 の小林尚人さん、3.5.1 の浅田秀樹
さん、3.5.4 の高橋労太さん、3.5.5. の釜谷秀幸さん)にも特に御礼申し上げます。さら
に、日頃から JASMINE の基礎開発に協力していただいており、この報告書作成にも協
力していただけた国立天文台の宮崎 聡さんと高遠徳尚さんに厚く御礼を申し上げます。
また、相対論的効果について日頃からお知恵を貸していただいており、報告書作成にもご
協力いただいた弘前大学の浅田秀樹さんにも感謝を申し上げます。また、confusion limit
の計算方法に関しては、竹内 努さんに多大なご協力をしていただきました。ここに御礼
を申し上げます。
そして、日頃、スペース研究会の開催とともに、CCD を用いた星像中心実験を共同で
行っている、月面天測望遠鏡 (ILOM) 計画チーム(河野宣之さん、花田英夫さん、荒木博
志さん、鶴田誠逸さん、田澤誠一さん、浅利一善さん、日置幸介さん、坪川恒也さん他)
のみなさんに深く感謝を申し上げます。
JASMINE に関しては、松本敏雄さん、井上 一さん、中川貴雄さん、満田和久さん、
澤井秀次郎さん、山川 宏さん、橋本樹明さん、峯杉賢治さん、小川博之さんをはじめと
し、宇宙科学研究所の多くのスタッフの方にもアドバイス、ご意見を頂いており、ここに
厚く御礼申し上げます。
また、宇宙開発事業団技術研究本部の岩田 努さん、野田篤志さん、對木淳夫さん、
上田裕子さん、小川 亮さんをはじめとする、技術研究本部の方々にも JASMINE の衛
星システム検討に関して多大なご協力をいただいております。この場を借りて、厚く御礼
を申し上げます。さらに、東京大学工学部航空宇宙工学専攻の中須賀真一さんとその研究
室の方々とは、Min-JASMINE 計画に関して、いろいろとご協力をいただいており、大
変感謝いたしております。また、理化学研究所の戎崎さんには、日頃から JASMINE に
なにかとご支援をいただいており、厚く御礼申し上げます。
また、海部宣男台長、観山正見企画調整主幹、藤本眞克位置天文・天体力学研究系主
幹、安藤裕康光赤外線観測天文学研究系主幹、唐牛 宏すばる観測所長、小林秀行将来計
画委員会委員長、家 正則光赤外将来計画検討委員会委員長をはじめ、国立天文台の方々
には日頃から何かとご支援、ご協力をしただいており、ここにあらためて感謝を申し上げ
ます。特に、勉強会やそのほかの多くの機会で有益なアドバイスをいただいている、笹尾
13.3 謝辞
223
哲夫さん(現在は韓国の亜州大学所属)や真鍋盛二さん、本間希樹さんをはじめとする
VERA チームの方々に厚く御礼を申し上げます。
最後に、JASMINE チームの皆さん、特にこの報告書を出すにあたって、多大な協力を
していただいた、山田良透さん、矢野太平さん、辻本拓司さん、上田誠治さん、小林行泰
さん、松原英雄さん、中島 紀さん、官谷幸利さんに御礼申し上げます。
JASMINE チーム代表 郷田直輝(国立天文台)
224
第 13 章
Summary
13.3 謝辞
225
z-band 仕様
K-band 仕様
Korsh 系
Korsh 系 2m
2m
主鏡の有効面積 A
2.76m2
2.76m2
ビーム混合鏡の数
2
2
ビーム混合鏡の面積
1.4m2
1.4m2
焦点距離 f
66.7m
65.8m
アストロメトリ用視野面積
0.23✷◦
0.17✷◦
4096×2048pixels
4096×4096pixels
15µm
18µm
Pixel on Sky
46.4mas
56.5mas
λ/D のサイズ
2pixels
4pixels
162(9×18) 個
42(6×7) 個
V, R, z, J, H
J, H, K
3.7 時間
5.0 時間 97.0arcsec/sec
71.9arcsec/sec
歳差周期
28.6 日
40.1 日
星が 1 検出器を通過する時間(積
1.96sec
3.22sec
10µas@z=15.5mag
10µas@K=12mag
z=18mag
K=16mag
H-IIA(dual launch)
H-IIA(dual launch)
Sun-Earth の L2 ポイント
同左 5年
5年
項目
観測装置
光学系のタイプ
主鏡の口径 D
検出器のサイズ
Pixel のサイズ w
検出器の個数(アストロメトリ
用)
測光用バンド
衛星仕様
衛星の回転周期
回転率
分時間)
観測精度
アストロメトリの精度
(位置測定の)限界等級
打ち上げロケット、軌道など
打ち上げロケット
軌道
観測年数
表 13.1: JASMINE の仕様をまとめた早見表
227
付録 A
JASMINE 仕様の計算方法
JASMINE の仕様を計算する方法をここでは紹介する。この方法はまだあくまで準解
析的手法である。つまり、位置精度は、天体の位置によらず一様と仮定しており、また、
精度の評価式もノイズを考慮しない理想的なものを使用していることに注意すべきであ
る。だが、この方法によって、検出器の必要な個数や衛星の回転率、歳差運動の周期、1
つの星に対して 1 年間に何回観測できるかが概算できる。さらに精度よい計算方法は、
JASMINE シミュレータを用いて、より現実に即して計算を行っていく予定である。従っ
て、この仕様概要は、あくまで第 0 次案的なものとお考え頂きたい。
(1)z-band の場合
ここでは、先ず z-band での観測を想定し、要求精度は、z=15.5mag で 10µas が達せ
されるものとする。また、主鏡は、口径 2m のものを考える。また、銀経方向は 360◦ 、銀
緯方向には、±3.5◦ サーベイ観測するものとする。
先ず、星像中心を望む精度で決定するためには、PSF をある程度の pixel で覆う必要が
ある。しかし、あまり広く覆うと全体の視野が狭くなり、サーベイエリアが小さくなる。
そこで、数値シミュレーションなどによるアルゴリズムを考察の上、以下のようにするこ
とが妥当であると判断した。つまり、
○回折限界とピクセル数との関係
λ f
=2
Dw
(A.1)
である。ここで、λ は波長、D は口径、f は焦点距離、w は検出器の 1pixel のサイズで
ある。従って、焦点距離 f は、次のようになる。
2wD
= 66.7[m]
f=
λ
w
15µm
さて、検出器に関しては以下の通りである。
D
2.0m
λ
0.9µm
−1
(A.2)
228
付録 A
JASMINE 仕様の計算方法
○検出器サイズ(scan 方向と cross scan 方向)
w
Npix−s
Npix−s w = 6.1 × 10 [m]
15µm
4096
w
Npix−c
−2
Npix−c w = 3.1 × 10 [m]
15µm
2048
−2
(A.3)
(A.4)
検出器の scan 方向の angular size αs と cross-scan 方向の αc は、
Npix−s w
αs =
= 5.3 × 10−2 [deg]
f
Npix−s w
= 2.6 × 10−2 [deg]
αc =
f
D
2.0m
D
2.0m
−1 −1 λ
0.9µm
λ
0.9µm
Npix−s
4096
Npix−c
2048
(A.5)
(A.6)
○次に 10µas の精度を出すために1つの天体に対して必要な総 photon 数 Nph は、精度
評価が理想的な場合、以下のようになる。
λ
σ=c D Nph
(A.7)
より、
2
Nph = c
λ
D
2
σ −2
c 2 λ 2 D −2 σ −2
= 2.2 × 10
0.5
0.9µm
2.0m
10µas
7
(A.8)
(A.9)
ここで、c は、係数で、シミュレーションによる解析によれば、ほぼ 0.5 である。
○さて、Z − band で m 等級の星に対して 1 つの鏡に対して 1 秒間に得ることが出来
る photon 数 Fm は、検出器の感度、鏡の有効面積、バンド幅などで決まり、次のように
なる。
Fm
Ai DEm Rw ∆ν
=
h
ν
A
D E0
10−0.4m
3
= 2.4 × 10
2.76m2
0.7
2100Jy
10−0.4×15.5
−1
∆ν/ν
Rw
Ni
×
0.2
0.63
2
(A.10)
(A.11)
ここで D は検出効率、Rw は観測される星の全エネルギーのうち星像の window (5 ×
9pixels) 内に含まれるエネルギーの割合、Em は z-band で m 等級の星のエネルギー。A
は主鏡の有効面積であり、Ni はビーム混合鏡の枚数、Ai = A/Ni である。h はプランク
定数である。
229
○以上より、10µ as を z = 15.5mag で出すための 1 天体の総積分時間が以下のように求
まる。
tint =
Nph
F15.5
(A.12)
−1
c 2 λ 2 D −2 σ −2 E
0
= 8.9 × 10 [sec]
0.5
0.9µm
2.0m
10µm
2100Jy
−1 −1
−1
A
100.4m
∆ν/ν
Rw
Ni
D −1
×
(A.13)
2
0.4×15.5
2.76m
0.7
10
0.2
0.63
2
3
○さて、1 天体が 1 つの検出器を通過する時間を t とする。また、ms = 9.8mag で
saturation を起こすとする。
0.109F9.8 t = Ne
(A.14)
ここで、Ne は、charge storage capacity、ファクター (Rc =)0.109 は 5×9 pixels で星像
を覆う場合の星像中心に位置するピクセルに蓄えられる photon の割合。以上より、
t=
Ne
Rc F9.8
(A.15)
−1 −1 Ne
A
Rc
D −1
= 1.96[sec]
1.0 × 105
2.76m2
0.109
0.7
0.4ms −1 −1 −1
10
∆ν/ν
Rw
Ni
E0
×
100.4×9.8
0.2
0.63
2
2100Jy
(A.16)
○衛星がスピン回転する周期 T は
T=
360◦
t
αs
(A.17)
−1
−1 −1 −1 D
λ
Npix−s
Ne
Rc
A
= 3.7[h]
5
2.0m
0.9µm
4096
1.0 × 10
0.109
2.76m2
−1
D −1 100.4ms ∆ν/ν −1 R −1 N E
w
i
0
×
(A.18)
0.7
100.4×9.8
0.2
0.63
2
2100Jy
○銀極まわりに衛星のスピン軸が歳差運動するが、その周期を Tpole とする。また、一
回衛星が自転する間に銀河面に沿って l[deg] 動くとする。この際、視野の (1-S) が重複す
るようにする。
この時、
l sin i = Sαc nc
(A.19)
230
付録 A
JASMINE 仕様の計算方法
以上より、
l= S
αc nc
sin i
−1 D
λ
Npix−c
= 1.1 × 10 nc
2.0m
0.9µm
2048
−1 S
sin i
×
◦
sin 3.5
0.25
−1
(A.20)
またさらに、
Tpole =
360◦
T
l
(A.21)
2 2 −1 −1
D
λ
Npix−s
Npix−c
= 5.1 ×
2.0m
0.9µm
4096
2048
−1 −1
−1 Ne
A
∆ν/ν
Rw
D −1 100.4ms
×
1.0 × 105
2.76m2
0.7
100.4×9.8
0.2
0.63
−1 −1 −1
Ni
E(0)
S
Rc
sin i
×
(A.22)
◦
2
sin 3.5
2100Jy
0.25
0.109
102 n−1
c [day]
ここで、nc はスキャン方向に垂直な方向に並べられている検出器の個数である。
さて、1 年間の観測回数(検出器通過回数)X は次のようになる。
1yr
1
Ni ns × 2 ×
Tpole
S
−1
−2 2 β
D
λ
Npix−s
Npix−c
Ne
= 5.7
nc ns
0.5
2.0m
0.9µm
4096
2048
1.0 × 105
−1 −1
Rw
sin i
D 100.4ms
∆ν/ν
A
×
2.76m2
0.7
100.4×9.8
0.2
0.63
sin 3.5◦
Rc
×
(A.23)
0.109
X= β ×
上記の第1式の 2 × 2 の意味は、2 の意味は、歳差1周期につき、2度サーベイ大円と
交わるファクターであり、1/S は、視野全体の S 倍の部分ずつ視野がずれていくことよ
り、平均的に 1/S 回続けて観測される効果である。また、β は太陽を避けて銀河面を観測
できる割合で、ns はスキャン方向に並べられている検出器の個数である。
○さて、積分時間の条件を課すと、検出器の必要な個数が以下のように求まる。
XTmis t = tint
ここで、Tmis はミッションの年数である。この時検出器の個数は
(A.24)
231
c 2 σ −2 A −1 D −1 100.4m nc ns = 1.6 × 10
0.5
10µm
2.76m2
0.7
100.4×15.5
−1 −1 −1 −1 −1
Rw
β
Tmis
Npix−s
∆ν/ν
×
0.2
0.63
0.5
5yr
4096
−1 sin i
Npix−c
(A.25)
×
2048
sin 3.5◦
2
従って、例えば、検出器をスキャン方向に 9 個、その垂直方向に 18 個並べれば、要求
精度を満足することができる。
またさらに、上記の導出から分かるように、このような個数になった場合、(A.22)式
より、歳差運動の周期は、約 28.6 日となる。また、一つのターゲットを一年間あたりに
観測する回数は、約 100 回となる。
(2)K-band の場合
では、次に K-band の場合を考える。この場合、要求精度は、K=12mag で 10µas を仮
定する。主鏡の口径、サーベイ領域などは、z-band と同様なものを考える。ただ、すべ
ての効果を入れた検出効率 D は 0.5 とする。基本的には、z-band の場合と全く同様の導
出方法であるが、計算結果を以下に列挙していく。
○回折限界とピクセル数との関係
λ f
=4
(A.26)
Dw
である。ここで、λ は波長、D は口径、f は焦点距離、w は検出器の 1pixel のサイズで
ある。従って、焦点距離 f は、次のようになる。
4wD
= 65.8[m]
f=
λ
w
18µm
D
2.0m
λ
2.2µm
−1
(A.27)
さて、検出器に関しては以下の通りである。
○検出器サイズ
Npix w = 73.7[mm]
w
18µm
Npix
4096
(A.28)
検出器の angular size α は
Npix w
= 6.4 × 10−2 [deg]
α=
f
D
2.0m
−1 λ
2.2µm
Npix
4096
(A.29)
○次に 10µas の精度を出すために1つの天体に対して必要な総 photon 数 Nph は、精度
評価が理想的な場合、以下のようになる。
λ
σ=c D Nph
(A.30)
232
付録 A
JASMINE 仕様の計算方法
より、
2
Nph = c
λ
D
2
σ −2
(A.31)
c 2 λ 2 D −2 σ −2
= 1.3 × 10
0.5
2.2µm
2.0m
10µas
8
(A.32)
ここで、c は、係数で、シミュレーションによる解析によれば、ほぼ 0.5 である。
○さて、K − band で m 等級の星に対して 1 つの鏡に対して 1 秒間に得ることが出来
る photon 数 Fm は、検出器の感度、鏡の有効面積、バンド幅などで決まり、次のように
なる。
Fm
∆ν
ν
−0.4m A
D E0
10
4
= 1.98 × 10
2.76m2
0.5
636Jy
10−0.4×12
−1
∆ν/ν
Rw
Ni
×
0.3
0.63
2
Ai DEm Rw
=
h
(A.33)
(A.34)
ここで D は検出効率、Rw は観測される星の全エネルギーのうち星像の window (9 ×
17pixels) 内に含まれるエネルギーの割合、Em は K-band で m 等級の星のエネルギー。
A は主鏡の有効面積であり、Ni はビーム混合鏡の枚数、Ai = A/Ni である。h はプラン
ク定数である。
○以上より、10µ as を K = 12mag で出すための 1 天体の総積分時間が以下のように求
まる。
tint =
Nph
F12
(A.35)
c 2 λ 2 D −2 σ −2 E −1
0
= 6.4 × 10 [sec]
0.5
2.2µm
2.0m
10µm
636Jy
−1 −1 −1 D −1 100.4m
A
∆ν/ν
Rw
Ni
×
(A.36)
2
0.4×12
2.76m
0.5
10
0.3
0.63
2
3
○さて、1 天体が 1 つの検出器を通過する時間を t とする。また、ms = 7.90mag で
saturation を起こすとする。
0.0288F7.9 t = Ne
(A.37)
ここで、Ne は、charge storage capacity、ファクター (Rc =)0.0288 は 9×17pixels で星
像を覆う場合の星像中心に位置するピクセルに蓄えられる photon の割合。以上より、
233
t=
Ne
Rc F10
(A.38)
−1 −1 Ne
A
Rc
D −1
= 3.2[sec]
8 × 104
2.76m2
0.0288
0.5
−1
−1
−1
100.4ms
∆ν/ν
Rw
Ni
E0
×
100.4×7.90
0.3
0.63
2
636Jy
(A.39)
○衛星がスピン回転する周期 T は
T=
360◦
t
α
(A.40)
−1
−1 −1 −1 D
λ
Npix
Ne
Rc
A
= 5.0[h]
4
2.0m
2.2µm
4096
8 × 10
0.0288
2.76m2
D −1 100.4ms ∆ν/ν −1 R −1 N E −1
w
i
0
×
(A.41)
0.5
100.4×7.90
0.3
0.63
2
636Jy
○銀極まわりに衛星のスピン軸が歳差運動するが、その周期を Tpole とする。また、一
回衛星が自転する間に銀河面に沿って l[deg] 動くとする。この際、視野の一部 (全体の
(1-S) 倍)が重複するようにする。この時、
l sin i = Sαnc
(A.42)
以上より、
l= S
αnc
sin i
= 2.6 × 10
−1
nc
D
2.0m
−1 λ
2.2µm
Npix
4096
sin i
sin 3.5◦
−1 S
0.25
(A.43)
またさらに、
Tpole =
360◦
T
l
(A.44)
−2 −2 λ
Npix
Ne
= 2.9 ×
2.2µm
4096
8 × 104
−1 −1 −1 A
100.4ms
∆ν/ν
Rw
Ni
D −1
×
2
0.4×7.90
2.76m
0.5
10
0.3
0.63
2
−1 −1 −1
E0
sin i
S
Rc
(A.45)
×
◦
636Jy
sin 3.5
0.25
0.0288
102 n−1
c [day]
D
2.0m
2 ここで、nc はスキャン方向に垂直な方向に並べられている検出器の個数である。
さて、1 年間の観測回数(検出器通過回数)X は次のようになる。
234
付録 A
JASMINE 仕様の計算方法
1yr
1
Ni ns × 2 ×
Tpole
S
−1 −2 2 2 β
D
λ
Npix
Ne
A
= 1.0 × 10
nc ns
0.5
2.0m
2.2µm
4096
8 × 104
2.76m2
D 100.4ms −1 ∆ν/ν R sin i −1
w
×
0.4×7.90
0.5
10
0.3
0.63
sin 3.5◦
Rc
×
(A.46)
0.0288
X= β ×
上記の第1式の 2 × 2 の意味は、2 の意味は、歳差1周期につき、2度サーベイ大円と
交わるファクターであり、1/S は、視野全体の S 倍の部分ずつ視野がずれていくことよ
り、平均的に 1/S 回続けて観測される効果である。また、β は太陽を避けて銀河面を観測
できる割合で、ns はスキャン方向に並べられている検出器の個数である。
○さて、積分時間の条件を課すと、検出器の必要な個数が以下のように求まる。
XTmis t = tint
(A.47)
ここで、Tmis はミッションの年数である。この時検出器の個数は
c 2 σ −2 A −1 D −1 100.4m nc ns = 3.9 × 10
0.5
10µm
2.76m2
0.5
100.4×12
−1 −1 −1 −1 ∆ν/ν
Rw
β
Tmis
Npix
sin i
×
(A.48)
0.3
0.63
0.5
5yr
4096
sin 3.5◦
従って、例えば、検出器をスキャン方向に 6 個、その垂直方向に 7 個並べれば、要求精
度を満足することができる。
またさらに、上記の導出から分かるように、このような個数になった場合、(A.45)式
より、歳差運動の周期は、約 40.8 日となる。また、一つのターゲットを一年間あたりに
観測する回数は、約 67 回となる。
235
付録 B
銀河系モデルの概要
銀 河 系 モ デ ル と し て Cohen の model を 採 用 し て い る 。詳 し く は Wainscoat et
al.[Wainscoat et al., 1992]、Cohen[Cohen, 1992] に記述されている。また、吸収の見積
りには、COBE の DIRBE による最新データを取り入れ、より現実に近いモデルとなっ
ている。
このモデルでは星のスペクトルタイプとして87種類を考慮し、スペクトルタイプご
とに分類された星の個数を目的のサイエンスに応じて求めることができる。Cohen のモ
デルでは B,V,H,I,J,12µm,25µm の 7 種のバンドで星の数を計算することができる。さら
に、我々に必要なzバンドについては、Cohen の B,V,H,I,J バンドのデータから各スペ
クトルタイプに対して評価した z バンドの星の明るさを用いて計算している。
銀河系成分として、disk, bulge, halo , spiral arm, molecular ring の5つを考える。
よって、あるスペクトル型 S の距離 r での個数密度 ρ(S) は、
ρ(S) = ρ(S)disk + ρ(S)bulge + ρ(S)halo + ρ(S)arm + ρ(S)ring
(B.1)
と表せる。各銀河成分の個数密度は、太陽近傍でのスペクトル型 S の個数密度 ρ0 (S)、
normalization factor, fD , fB , fH , fA , fr を使って、以下の式から計算する。なお、各
バンドでの、星のスペクトル型毎の絶対等級と normalization factor は、いくつかの観測
データとうまく合うように評価されており、Wainscoat et al. の論文中に表として与えら
れている。
(1) disk
exponential disk を仮定する。
|z|
r − r0
−
ρ(S)disk = ρ0 (S)fD (S) exp −
(B.2)
h
hz (S)
ここで、r0 :銀河中心までの距離 = 8kpc、h:the radial scale length=3.5 kpc、hz (S):ス
236
付録 B
銀河系モデルの概要
ペクトル型 S の scale height である。
(2) bulge
軸対象の bulge を仮定する。
3
ρ(S)bulge = ρ0 (S)fB (S)gB x−1.8 e−x
ここで、x =
(B.3)
r 2 + k12 z 2 /r1 (k1 :the bulge axis ratio = 1.6; r1 :the bulge radius=2
3
kpc)。gB :bulge の x−1.8 e−x = 1 における密度/太陽近傍の disk の密度=3.6 として
いる。
(3) halo
r 1/4 則を仮定する。
ρ(S)halo = ρ0 (S)fH (S)gH exp −7.669
r
re
1/4 r −7/8
re
(B.4)
ここで、re :the effective radius of the halo=2.83 kpc、gH =0.002。
(4) spiral arm
表 B で与えられる 3 つの spiral arm のペアを取り入れる。
θ(r) = a log
Arm
a
r
rmin
(B.5)
+ θmin
rmin
θmin
Extent
width
(kpc)
(radian)
(radian)
(pc)
1
4.25
3.48
0.000
6.0
750
1’
4.25
3.48
3.141
6.0
750
2
4.89
4.90
2.525
6.0
750
2’
4.89
4.90
5.666
6.0
750
L
4.57
8.10
5.847
0.55
300
L’
4.57
7.59
5.847
0.55
300
表 B.1: spiral arm の存在位置を表すパラメーター
密度分布は disk と同じであると仮定している。すなわち、
ρ(S)arm
|z|
(r − r0 )
−
= ρ0 (S)fA (S)gA exp −
h
hz (S)
ここで、gA :disk の総面積/ arm の占める面積=5 である。
(5) molecular ring
(B.6)
237
r ∼ 0.45r0 にある molecular ring をモデル化して加える。
ρ(S)ring
−(r − rr )2
|z|
= ρ0 (S)fr (S)gr exp
−
2
2σr
hz (S)
(B.7)
ここで、rr :the ring radius=0.45r0 、σr =0.064r0 、gr :disk の総面積/ ring の総面積=25
である。
Dust による吸収の効果ダスト
吸収は、DIRBE/IRAS dust map の結果 (http://astron.berkeley.edu/dust/) を使っ
た。DIRBE のデータは各方向での dust による吸収の積算量である。よって、dust の分
布を disk の密度分布と同様の exponential 分布であると仮定することによって太陽近傍
の吸収量を求める必要がある。距離 r 、r + δr 間の吸収 δAλ は、
r − r0
|z|
δAλ = Aλ0 exp −
−
δr
hda
hza
(B.8)
ここで、Aλ0 :太陽近傍での吸収の値、hda :the radial scale length of the absorption= 3.5
kpc、hza :the scale height of the absorption=100 pc である。
そして、各 (M,b) における Aλ0 の値を下式から決定する。
Aλ (DIRBE) = Aλ0
0
∞
r − r0
|z|
dr
exp −
−
ha
hza
(B.9)
観測との比較
Cohen のモデルは当時の観測を正確に再現するように作られたモデルであるが、最近
の観測結果である2 MASS(Two Micron All Sky Survey) の結果にも良く合うことがわ
かっている。これを参考のために図 B.1 に示しておく。
238
付録 B
銀河系モデルの概要
図 B.1: 実線が 2mass での観測結果、点線が Cohen のモデルで予測される星の数。
K < 14 では観測と Cohen モデルが非常に良くあっていることがわかる。
239
付録 C
Astrometry における source
confusion limit
JASMINE の PSF から求められる星像決定に必要な領域を Ωb [deg2 ] 、星の微分計数
を dN (m)/dm [stars/deg2 /mag]、m 等の星のフラックスを Sm ≡ S0 10−0.4m [Jy] とす
ると、Ωb に対して、Ωb を満たす暗い星の積分フラックスは
N̄ ≡
m1
Sm
m0
dN (m)
dm [Jy]
dm
(C.1)
となる。次に Ωb の積分フラックスのゆらぎの分散は
(∆N) ≡
2
m1
2
Sm
m0
dN (m)
dm [Jy2 ]
dm
(C.2)
s/b
dN (m)
dm =
dm
Ωb
(C.3)
となる。ここで、積分の下限 m = m0 は、
N (m < m0 ) =
0
m0
によって定める。s/b は surce per beam と呼ばれるもので Ωb の中に m > m0 である暗
い星が s/b 個以上入ると confusion が起こることに対応する星の数である。アストロメト
リの対象である星のフラックスを SA とすると、confusion が効かない(光子統計のみで
決定精度が決まる)ためには、
SA
> Nph
∆N
(C.4)
が満たされる必要がある。ここで、NA は、mA 等級の星に対して、1回の検出器当たり
で検出される光子数である。それで、口径 2.0m、z バンドの場合、10µas のアストロメト
リを達成するためには、NA = 4.76 × 103 · 10−0.4(mA −15.5) となることから
240
付録 C Astrometry における source confusion limit
mA < 5 log
S0
∆N
−
5
log(4.76 × 103 ) − 15.5
2
(C.5)
K バンドの場合は NA = 6.37 × 104 · 10−0.4(mA −12) より
mA < 5 log
S0
∆N
−
5
log(6.37 × 104 ) − 12
2
(C.6)
となる。
まず JASMINE の PSF から求められる星像決定に必要な領域 Ωb は、
z バンドの場合、
Ωb(z) = 4.25 × 10−5 arcmin2
K バンドの場合
Ωb(K) = 3.05 × 10−4 arcmin2
と数値的に求められる。
次に s/b は d log N/d log L に依存しており、これを銀河モデルから評価する。今回は
d log N/d log L が最も大きいと思われる (l, b) = (0, 1) の方向での計算をすることにより
厳しく d log N/d log L を求める。この結果を図 C.1 に示す。図 C.1 により、z バンド、k
バンドともに d log N/d log L = 0.4 程度であることがわかる。一方、s/b の依存性を図
C.2 に示す。ここで γ は N (S) ∝ S −γ のべき指数を表している。また m ∝ −2.5 log S よ
り d log N/d log L = 0.4 は γ = 1 に対応する。故に図 C.2 の γ = 1 より s/b ∼
= 0.15 とな
るので、s/b = 0.1 を取れば十分であることがわかる。よって Ωb(z) , Ωb(K) と s/b = 0.1
をもって confusion limit を評価した。
241
図 C.1: K バンドとzバンドの見かけの等級に対する期待される星の数。銀経 0 °、
銀緯 1 °方向の様子。
図 C.2: JASMINE PSF と Gaussian PSF での s/b のグラフ。竹内努氏提供 (計算
方法は Takeuchi,T.T.& Ishii,T,T 2003,submitted を参照のこと)
243
付録 D
ベーシックアングル補足
ここではまず初めに 1 台の望遠鏡では衛星の回転則と星の座標とに縮退が生じて解けな
いが、ベーシックアングルが正確に決まった 2 台の望遠鏡による同時観測をおこなえば星
の座標が求まる事を述べる。次に、もしベーシックアングルが振動し、その振動数が、衛
星の回転則の一様からのずれの振動の振動数と同じならば、2 台の望遠鏡を用いても縮退
が生じ解くことが出来ない事を示す。そのため、ベーシックアングルの振動の大きさを極
力小さく抑えることや縮退が生じにくいような創意工夫、及びベーシックアングルのモニ
ターの必要性も具体例を用いながら説明する。
望遠鏡 1 台である大円上の座標 ψ = 0, π2 , π, 3π
2 に位置する星を回転則 ψ = ωt+a sin ωt
をもつ衛星にて観測をするとする。この時、ψ = 0, π2 , π, 3π
2 の星をそれぞれ ωt = 0,
ωt π
2
− a, ωt = π, ωt 3π
2
+ a なる時刻で観測する事になる。この時回転則を誤って
ψ = ωt と考えてしまうと、観測時刻は上で述べたように ωt = 0, ωt ωt 3π
2
π
2
− a, ωt = π,
+ a であるから、星の座標を ψ = 0, π2 − a, π, 3π
+ a と測定し誤ることになる。
2
一方、実際に星が、大円上に非一様に分布し、ψ = 0,
π
2
− a, π, 3π
2 + a にあり、回転則が、
ψ = ωt で有る場合も前述の場合と全く同じ観測結果を出す。つまり、両者の区別はまっ
たくつかない。すなわち衛星の回転則と星の座標とに縮退が生じ解くことが出来ない。し
かし、大角度はなれた望遠鏡が 2 台あり、そのベーシックアングルが決まっていると以上
の縮退が解ける。
例えば、今衛星の回転則を以下であるとする。
ψ = ωt + a sin ωt + γi
(D.1)
ここで i は望遠鏡の番号で i = 1, 2, γi は
γ1 = 0
γ2 = γ =
π
2
(D.2)
244
付録 D
ベーシックアングル補足
であり、ベーシックアングルを表す。この時、望遠鏡1では前述同様の時刻 ωt = 0,
ωt π
2
− a, ωt = π, ωt 3π
2
+ a で観測し、もう一方の望遠鏡 2 の方でも同時に星を観
測する事になる。しかし、星の分布が非一様で回転則を ψ = ωt と考えると 90 度離れた
2 つの望遠鏡で星が同時に観測される事と矛盾する。従って、2 台の望遠鏡による同時観
測により回転則と星の位置を同時に解くことが可能となる。
しかし、ベーシックアングルが正確に固定されておらず、未知のままであるとやはり 1
台の望遠鏡の場合に起こった衛星の回転則と星の座標との縮退が生じる。いいかえれば、
ベーシックアングルの変動と衛星の回転則の縮退が解けない。それを以下の具体的な例で
示す。
今衛星の回転則を以下であるとする。
ψ = ωt + a sin ωt + γi
(D.3)
ここで i は望遠鏡の番号で i = 1, 2, γi は
γ1 = 0
γ2 = γ =
π
2
(D.4)
であり、ベーシックアングルを表す。
この回転則をもった衛星で、上と同様に大円上の座標 ψ = 0, π2 , π, 3π
2 に位置する星を
観測することにする。この時 ωt = 0, ωt ぞれ ψ = 0, π2 、ψ =
π
2 , π 、ψ
π
2
= π, 3π
2 、ψ =
− a, ωt = π, ωt 3π
2 ,0
3π
2
+ a なる時刻にそれ
の 2 つの星を同時に観測していく事に
なる。
この時もしベーシックアングルが上述のようにベーシックアングルが固定されていると
回転則が ψ = ωt だと誤る事はない。しかし、もしベーシックアングルが
γ1 = 0
γ2 = γ =
π √
π
+ 2a sin(− + ωt)
2
4
と変動すれば、やはり時刻 ωt = 0, ωt ψ = 0, π2 − a、ψ =
π
2
π
2
− a, ωt = π, ωt − a, π 、ψ = π, 3π
+ a、ψ =
2
3π
2
(D.5)
3π
2
+ a にそれぞれ
+ a, 0 の 2 つの星を同時に観測し
ていくと考える場合との区別がつかなくなる。すなわち、回転側と星の位置との縮退が解
けなくなる。以上をみて解るが、衛星の回転則とベーシックアングルとが同じ振動数で変
動している項が縮退を起こしている。そこで、ベーシックアングルの振動の大きさを極力
小さく抑えるか、ベーシックアングルで起こりうる変動の振動数が衛星の回転則に出来る
だけ含まれないような工夫が必要とともにベーシックアングルが充分に管理され、監視さ
れている必要がある。これが出来なければ星の位置決定は困難となる。
245
付録 E
関連する情報技術について
この章の目次
E.1
E.2
E.3
E.4
E.5
E.6
簡単なオブジェクト指向ソフトウェア開発 . . . . . . . . . . . . . . 246
E.1.1 はじめに . . . . . . . . . . . . . . . . . . . . . .
E.1.2 コトバの混同を避ける . . . . . . . . . . . . . . .
E.1.3 オブジェクト指向ソフトウェア開発がなぜ必要か?
E.1.4 まとめ . . . . . . . . . . . . . . . . . . . . . . .
Object 指向プログラミング . . . . . . . . . . . . . .
E.2.1 Object 指向の必要性 . . . . . . . . . . . . . . .
E.2.2 Objsect の要素 . . . . . . . . . . . . . . . . . .
E.2.3 Object 指向言語の 4 つの要素 . . . . . . . . . . .
E.2.4 Object 指向の欠点と有効性 . . . . . . . . . . . .
開発工程と UML . . . . . . . . . . . . . . . . . . .
E.3.1 UML とは . . . . . . . . . . . . . . . . . . . . .
E.3.2 ビュー . . . . . . . . . . . . . . . . . . . . . . .
E.3.3 UML 図各論 . . . . . . . . . . . . . . . . . . . .
E.3.4 CASE ツール . . . . . . . . . . . . . . . . . . .
設計例 . . . . . . . . . . . . . . . . . . . . . . . . .
E.4.1 要求定義 . . . . . . . . . . . . . . . . . . . . . .
E.4.2 設計 . . . . . . . . . . . . . . . . . . . . . . . .
E.4.3 実装 . . . . . . . . . . . . . . . . . . . . . . . .
E.4.4 拡張 . . . . . . . . . . . . . . . . . . . . . . . .
Gang of Four のパターンリスト . . . . . . . . . . .
E.5.1 生成に関するパターン . . . . . . . . . . . . . . .
E.5.2 構造に関するパターン . . . . . . . . . . . . . . .
E.5.3 振る舞いに関するパターン . . . . . . . . . . . . .
その他の情報技術 . . . . . . . . . . . . . . . . . . . .
E.6.1 分散オブジェクト技術 . . . . . . . . . . . . . . .
E.6.2 CVS . . . . . . . . . . . . . . . . . . . . . . . .
E.6.3 XML . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
246
246
247
251
251
251
252
252
253
255
255
256
257
264
266
266
266
269
271
273
274
278
283
287
287
288
288
246
付録 E
E.7
E.8
関連する情報技術について
E.6.4 Web サービス . . . . . . . . . . . . . . . . .
E.6.5 テスティングフレームワーク . . . . . . . . .
情報用語一覧 . . . . . . . . . . . . . . . . . . . .
実行・開発環境の入手と整備 . . . . . . . . . . . .
E.8.1 Java 実行環境及び開発環境 . . . . . . . . . .
E.8.2 Java ライブラリ . . . . . . . . . . . . . . . .
E.8.3 CVS と ssh . . . . . . . . . . . . . . . . . .
E.8.4 Unicode 環境 . . . . . . . . . . . . . . . . .
E.8.5 CCD カーネルと GUI . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
289
289
289
296
296
296
300
300
301
E.1 簡単なオブジェクト指向ソフトウェア開発
E.1.1 はじめに
オブジェクト指向という言葉が生まれて約 30 年、ソフトウェア開発において世間に知
られてから約 20 年が経つ。20 年前にはハードウェアのコストやノウハウの無さがネック
となり、実現できなかったこのソフトウェア開発技法も現在の多様化、複雑化したニーズ
に対応するためにソフトウェア開発業界ではなくてはならないものとなっている。
E.1.2 コトバの混同を避ける
オブジェクト指向とオブジェクト指向言語、そしてオブジェクト指向ソフトウェア開発。
『オブジェクト指向』とは
この言葉自身にすでに苦手意識をもつ方も多いのであるが、オブジェクト指向とは『現
実に存在するもの』を性質 (ものが保持しているデータ) と動作 (どのような動きをするの
か) を見極めて一まとめのグループにして考えるということである。
(注) これを説明するためによく犬とか猫などの例が出てきて、犬は 4 本足だとか (デー
タ)、「わん」と鳴くとか「にゃん」と鳴く (動作)とか言う話が出てきてよくわからなく
なる。
『オブジェクト指向言語』とは
オブジェクト指向の考えを実現しやすいように作られているのが、『オブジェクト指向
言語』である。オブジェクト指向言語といわれるものは幾つかの必須要素と呼ばれる能力
を持っており (付録 E.2 参照)オブジェクト指向を実現しやすいように作られている。逆
E.1 簡単なオブジェクト指向ソフトウェア開発
247
に言えば、これらのオブジェクト指向言語を用いなくてもオブジェクト指向ソフトウェア
開発をすることは可能である。しかし、これは『東京から大阪まで徒歩でも移動できる』
ということを言っているようなものである。実際に江戸時代には当然のこととされていた
ことだが、現在の交通事情では現実的ではない。我々はオブジェクト指向言語を使用し、
現在のソフトウェア開発事情にのっとって開発に望むことにする。
『オブジェクト指向ソフトウェア開発』とは
オブジェクト指向ソフトウェア開発の定義は『オブジェクト指向の方法論に基づいてシ
ステムを分析/設計し、その結果をオブジェクト指向言語によって実現すること』とすれ
ば大きく誤解することは無いであろう。分析と設計とはどのようなものかについては後で
具体的な例を述べる。
ほかにもオブジェクト指向を勉強していると『メッセージ』
『インスタンス』
『メソッド』
などよくわからない言葉が出てきて混乱を招くもととなっているわけだが、ここでは、こ
れら語彙の使用と説明は省きなるべく混乱を招かないようにしたいと思う。
E.1.3 オブジェクト指向ソフトウェア開発がなぜ必要か?
オブジェクト指向は経験則
オブジェクト指向的な考え方はある程度プログラムを経験されている方ならある程度理
解しているはずである。なぜなら、ある程度経験をつめば誰でも便利なプログラムや有用
性、再利用性の高いプログラムなどを作ろうと (たとえ挫折しても)思ったことがあるは
ずだからである。例えば、長くなって見にくくなったプログラムをいくつかの部分に分け
ることを思いつきサブルーチンを用いてプログラムを見やすくしようと試みたことはない
だろうか?さらに慣れてくると、そのサブルーチンを他のプログラムでも使えるようにと
汎用性を持たせようと改良したことはないだろうか?更にベテランと言われる方はプロ
ジェクト用、開発チーム用のライブラリを開発しようと頭を悩ませたこともあるかもしれ
ない。オブジェクト指向はこのようなプログラマの試行錯誤から生まれたといっても過言
ではないであろう。実際、オブジェクト指向が提唱される前は一部の職人プログラマがこ
のような試行錯誤を繰り返し、このノウハウを (独占的に)所持していたのである。
オブジェクト指向が今日の形になるまでにも色々な開発方法が提唱されてきた。オブ
ジェクト指向はこれらプログラマのノウハウの集大成であり、経験的なもので積み上げら
れているのである。このように言われると確固としたものがなく心もとないと感じるかも
しれないが、我々の身近に存在するモノはこのようにして作られているのである。例えば
248
付録 E
関連する情報技術について
家やビルなどの建築物から、机や文房具にいたるまで、最初は職人がノウハウを積み上げ
ていた。しかし、現在では一部の限られた職人でなくても高級な品物が作れるようになっ
たことは今の実世界を見れば明らかである。(工場で働いているのは専門家ではなくアル
バイトであったりする)このような現実に存在するモノを開発するのと同じようなスタン
スで、ソフトウェアを開発していこうと言うのがオブジェクト指向ソフトウェア開発とい
う開発方法論なのである。
建築業界を例にしたオブジェクト指向ソフトウェア開発の説明
オブジェクト指向の利点として開発段階においての変更がしやすいと言う点が上げられ
る。この利点を説明する例としては建築業界での家の設計の仕方が使われることが多い。
ここで、鍵となるのは依頼主のほうが『自分の建てたい家の詳細をすべて決定しているわ
けではない』と言うことである。大まかな要求や予算、面積などの制限はあるものの、依
頼主の好みの問題も加わり、そこから出来上がるものは千差万別であると言うわけであ
る。このような複雑な問題に対して、建築業界ではどのようにして対応するかと言うこと
を簡単にあげると
1. 要求定義:依頼主が何を要求してるか、またその要求の優先順位はどうか?などを詳
しく聞き要求を定義する
2. 分析:依頼主の要求、制限を整理する。依頼主の要求は実行可能か?また使い勝手は
どうかなどを分析する
3. 設計:分析した内容に従って、実際に家の模型を作ってみる。(最初は外枠だけかも
しれない。今は PC 上で描かれたりもする。)
4. 打ち合わせ:依頼主と家の模型を使って、問題の洗い出しをする。(キッチンの配置と
か、壁の色がどうのこうの etc.)
5. 依頼主が納得するまで1∼4を繰り返す。
6. 実装段階:依頼主が納得したら (ほかの要因も多々あるでしょうが)実際の建築に
入る。
では、このようなプロセスを経るには何が必要だろうか?それは実際に模型を作れて、
その模型が変更にリーズナブルであると言うことである。家の模型を見せるときに、家の
内壁が固定されていたら間取りを変更することが困難であるし、風呂や台所も家の模型に
張り付いていたら、作り直すのに時間がかかる。さらに内装だけでなく、打ち合わせ段階
で予算が足りなくなったから 3 階建てから 2 階建てに変更や、逆に予算があるから地下室
を付け足すことも考えられる。
E.1 簡単なオブジェクト指向ソフトウェア開発
このような変更に柔軟性を持つためには何が必要なのだろうか?それは、家というモノ
を細分化することである。家というモノが何からできているかを考えると、
• 柱、壁、窓、扉、床など :家というモノを構成する要素
• 風呂、トイレ、台所など :水周りなど家の設計に影響を及ぼす要素
で構成される。このように、家を部品に分け個別に用意しておけば、依頼主の要求に柔軟
に対応できる。急な変更があってもその部分を入れ替えもしくは付け加えればよいので
ある。
オブジェクト指向ソフトウェア開発ではこの家の建築の仕方と同じように、ソフトウェ
ア開発を行う。家を立てる例と非常に似ているのは、『依頼主が望んでいるソフトウェア
の詳細を決定していない(決定できない)』点にある。
似ていない点としては、『ソフトウェアは目に見えず手で触ることもできないモノ』で
あるということである。
ここでひとつ問題が生じる。家の例では家の模型を依頼主の前に出すことによって、家
の内側はこうなるとか、利便性を考えて台所はこっちに配置したほうが良いとか、と言う
議論ができた。しかし、ソフトウェアは実体のないものであるから、開発前からそのよう
な模型を作り、依頼主に使ってもらって使い勝手を議論しながら開発を進めることは非常
に困難であった。
そこで、オブジェクト指向ソフトウェア開発では UML が用いられる。UML の説明は
付録 E.3 で書かれているが、一言でいうとソフトウェア開発における世界共通語 (共通定
義) である。家の建築で出てきた壁とか柱などの部品は、常識的にどのようなものかを誤
解することはまずないと思う。ソフトウェアの世界では、このような共通の常識と言うも
のが存在しなかったので混乱を招いた時期があった。それを解決するのが UML を使った
表記方法であり、今では世界標準となっている。UML を使えば目に見えないソフトウェ
アの成果物 (家)、そして部品 (柱、壁、etc) をまるで建築模型を作るように扱うことがで
きるようになったのである。
また、UML を使うと仕事の分業化も行える。例えとして話を建築業界に戻すと、設計
士と実際に家を建てる大工は別のグループが行う。これは建物を設計する人と、建てる人
のとのあいだに誤解のない意思疎通が可能であって初めて行えることである。ソフトウェ
アの世界でも UML と言う業界標準言語ができたおかげで、誤解のない意思疎通が可能に
なりソフトウェアを設計する人、実際にコードを書く人、のように分担作業ができるよう
になった。それぞれの部門の担当者は自分の専門分野に力を注ぐことができるようにな
り、より作業効率が上がるようになったのである。
UML を使う利点であげておきたい事がもうひとつある。建築業界には模型を使って顧
客と打ち合わせをするのではなく、PC 上で家を再現して顧客のニーズを探ると言ったこ
249
250
付録 E
関連する情報技術について
とが行われるようになっている。そして PC 上で再現した家は実際の家の建築の基礎デー
タとしてそのまま使用することができ設計図の骨組みを描いてくれる。設計士はその骨組
みの上にさらに細かい仕様を書き加えていくと言うスタイルになってきている。これは模
型を作って、一から設計図を書くという作業を大幅に減少させているのである。
ソフトウェアの世界でも UML を使うことによってこの省作業化が可能になったのであ
る。UML で使われる図は一意の定義を持っていますから人間のみならず、機械(PC)に
も理解できるものである。この作業をしてくれる道具のことを一般に CASE ツールと呼
ぶ。CASE ツールは UML で描かれたソフトウェアの模型からソフトウェア開発の骨組み
となるコードを作ってくれるものである。これはソフトウェアの実装担当者にとって作業
の軽減となり、より中身の作業に力を注ぐことが出来るようになった。実際のソフトウェ
ア開発業界ではこれらのツールによる作業の軽減より仕事の要求の増加のほうが大きく仕
事が楽になったと言う話はなかなか聞かないが、これらのツールを使わなければ複雑に
なったソフトウェア開発は非常に困難なものとなるであろう。
これまで家の建築を例にとって話を進めてきたが、この開発手法は車や電化製品、電子
部品などの開発にも使われており工業の世界ではきわめて一般的なものであるといえる。
この工業界で成功した開発技法をソフトウェア開発にも適応しているのがオブジェクト指
向である。そうは言うものの、ソフトウェア開発にのみ付きまとう問題もある。ソフト
ウェアと言うものは出来上がった後でも仕様の変更が多々あり、バージョンアップが比較
的頻繁に行われるという問題である。今までの例ではモノを作り出すまでの変更は容易で
あるが、モノを作り始めた後の変更は難しいように思われる。家の例でも建築し始めてし
まうと実際の問題として変更は困難であるように見える。しかし、実はオブジェクト指向
ソフトウェア開発はこの問題にも対応しているのである。また、建物の例で言いますと増
築という問題にあたる。増築の度合いにもよるでしょうが、増築する時に建物の設計を一
からやり直すであろうか?通常は変更のある部分だけをやり直し、新しい部分を加えると
言うことになるであろう。(注:この考え方はオブジェクト指向というより構造化と言わ
れた考え方です。オブジェクト指向はもう一段階進んでいる。)さらにソフトウェアの場
合は建築物のように部品が老朽化や破損することない。たとえ増築の度合いが大きくな
り、全体的に改築と言うことになっても今までの開発してきた部品は無駄になることはな
く、すべて再利用することができる。よって我々は改良が加えられれば、その改良したと
ころのみを変更すればよいのである。
オブジェクト指向を用いればこのように、ソフトウェアを開発し成果物を得るところま
でだけではなく、その成果物を実際に運用するところまでをサポートした考え方なので
ある。
E.2 Object 指向プログラミング
251
E.1.4 まとめ
Jasmine の詳細な仕様はまだ決定されておらず、これから Simulator を使って徐々に開
発されていくものである。これが、Jasmine Simulator に対して我々がオブジェクト指向
ソフトウェア開発を選択した大きな理由である。依頼主である我々にも今現在は最良な仕
様を決定することが出来ないのである。さらに Jasmine Simulator は多くの部分から成
り立ち、それぞれが独自の仕様変更を行い、その上全体的にも仕様要求が変更される、と
いった多種多様な変化が予想される。それ故この開発にはオブジェクト指向ソフトウェア
開発を用いなければ開発不可能であると判断する。
衛星の仕様がまだ決定せず、繰り返し仕様要求を変化させながら最良の道を探ろうとす
るにはオブジェクト指向ソフトウェア開発が必要不可欠なのである。
E.2 Object 指向プログラミング
E.2.1 Object 指向の必要性
∗1
計算機の進歩にしたがって、ソフトウエアシステムは巨大化・複雑化した。そのため、
複雑化に対応できるソフトウエア技術というものが必要になった。巨大プロジェクトにお
いては、使用するソフトウエアも当然巨大なものとなる。巨大なソフトウエアに対応す
る技術として誕生した Object 指向技術は、必須のものとなるであろう。また、いわゆる
Moore の法則∗2 は、すでに単体の半導体では限界が見えており、分散オブジェクト技術
のような適切なソフトウエア技術とセットで考えなければ性能向上は見込めないという考
え方がある。そう言った意味からも、オブジェクト指向は有用である。
この Object 指向には、三つの要素が重要だと考えられている。
まず、第一の条件は自然な発想によるプログラミングである。できるだけ現実世界に近
いイメージでプログラミングを行なうことによって、表現しようとするものとプログラム
の関係がつかみやすいプログラムを書けるような言語仕様を考えるということである。こ
れが、Object 指向という考え方の基本である。現実世界は、「もの」同士が何かの作用を
しながら進行する。そこで、計算機の上に現実世界の「もの」に対応する object を作り、
もの同士が作用をし合うということを、計算機上の object がメッセージを交換するとい
うイメージでプログラミングを行なってゆくのが、object 指向プログラミングである。
次に大切なのは、仕様に対する柔軟性である。計算機プログラムの開発では、次々に機
∗1
∗2
E.2.1 章から E.2.3 章までの解説は、文献 [van der Linden, 1996][van der Linden, 1997] に従う。
Intel 名誉会長 Gordon Moore 氏が 1965 年に提唱した、半導体の集積度は 18ヶ月で二倍になるという
経験則。現在では、集積度の向上はやや鈍ってきたものの、性能と考えればまだ維持されている。
252
付録 E
関連する情報技術について
能が付け加えられたり変更されたりということが起こる。こういったことに対して、ある
箇所のちょっとした変更が、プログラム全体の多数の箇所への変更を要求するようでは、
大きなプログラムを書くことは現実的には不可能となる。そこで、適切にカプセル化を行
なうことで、他への影響を軽減する方法をとる。これは、object 指向では、上で言った
メッセージを交換する手段、即ちメソッドを object 自身が持ち、このメソッドが他のオ
ブジェクトから適切に隠蔽出来る、すなわちアクセス制御ができるという実装方法をとる
ことで、解決されます。
最後に、再利用性の高いソフトウエアの構築が求められる。本質的に同じことを行なう
のに、データ型がちょっと異なるだけでプログラムを書き直すことになると、10 種類の
データ型に対する処理を行なうには 10 個のプログラムが用意されることになり、従って
このプログラムを保守するには常に 10 個のプログラムの整合性を確保する必要が生じる。
これでは、事実上保守は不可能である。そこで、適切なモデル化により、再利用が可能な
ソフトウエアを構築しておくことが重要となる。
E.2.2 Objsect の要素
Object と呼ばれるものは、状態、振舞、識別性の 3 つの要素を持っている。
例えば CCD がどちらの向きに向いているかとか、それぞれの pixel にどれだけの
チャージがたまっているかとか、シャッターが開いているとか閉まっているとかそういっ
たものが状態となるであろう。
それにたいして、CCD のチャージをフラッシュするとか、シャッターを開けるとか閉
めるとか、読み出すとか、そう言った振舞が定義されると予想される。
そして、実際には衛星の上に CCD を 100 個程度搭載することになるので、それぞれが
区別できる (識別性) 必要がある。
クラスとは、ユーザーが定義する「型」である。組み込みの型には、その上で可能な操
作が定義されている。プログラマが定義したクラス型に対しても、その上の操作を限定
することを可能にしたのが、クラスである。クラスの中にある「もの」はメンバーと呼ば
れ、またメンバー関数はメソッドとも呼ばれる。通常は、メンバーは状態を表すために使
われ、メソッドは振舞を定義するために使われる。
オブジェクトとは、クラス型の特定のインスタンス (への参照) である。
E.2.3 Object 指向言語の 4 つの要素
Object 指向言語には、4 つの重要な要素がある。ここでは、これを順番に説明する。
まず、第一の重要な要素は Abstraction(抽象化) である。これは、対象を表現するの
E.2 Object 指向プログラミング
253
に必要な属性を一括りにすることである。対象を表現するのにどのような属性が必要かと
いうことは、ものの見方そのものを与えることになる。対象には様々な要素があるが、今
見ている見方にとって不要な性質は切り落とし、必要な、あるいは適切な性質だけを残す
作業である。素人向けの星のデータベースを作るのであれば、単色の等級 (整数)、天球上
の位置、属する星座の名前、名前のついている星ならその名前、星座にまつわる伝説や故
事などが星の属性となる。固有運動や視線方向の速度といったものは、不要な属性といえ
るだろう。一方、Astrometry で使うデータは、多色の等級 (実数)、位置、固有運動、視
線速度、などが必要になるが、故事などは不要な属性である。現在使われている通常の言
語では、構造体やレコードと呼ばれるデータ型が用意されています。
二番目は、Encapslation(カプセル化) です。data と operation の組を作り、情報隠
蔽をしてアクセスの制限をすることを、カプセル化と言う。C の structure は、アクセス
制御や method を含まないので、完全な意味でカプセル化しているとは言い難い。fortran
90 も、データ隠蔽は出来ているが、データとメソッドの組みを作っているわけではない
ので、オブジェクト指向の意味においてはカプセル化の実装は不十分なものと言える。
三番目の性質は、Inheritance (継承) である。読んで字のごとく、性質を受け継ぐこ
とである。例えば、一般的に「星」というもののなかに、「恒星」と「惑星」があり、「恒
星」の中には「変光星」とか「中性子星」とかいう特殊な星がある。「星」には半径や色、
位置などの属性がある。これは、恒星でも惑星でも、変光星でも持っている共通の性質で
ある。特殊な「星」、例えば変光星には変光周期や変光星型などの属性があるが、恒星が
もっている属性は共通に持っています。
最後に、Polymorphism(多相性) を説明する。多相性には二つある。一つは overload
とよばれるもので、同じ名前で引数のことなる別の関数を定義することが出来る。これ
は、プログラムを書く時にちょっとだけ分かりやすくなるというご利益がある。もう一つ
は override と呼ばれるもので、継承されるクラスでは、同じ関数が別の機能を持つこ
とが出来る。継承されるクラスによって、意味的に同じものを計算するのに別の処理が
必要である場合がある。例えば、検出器は input を受け取って output を出すと言う意味
で、見かけ上全く同じだが、内部の動作は検出器によって異なる。これをシミュレーショ
ンする場合、動的解決をするようにしてスーパークラスの側でこれをシミュレーションす
る関数を作っておけば、プログラムは非常にすっきりする。こういう方法を、遅延束縛と
いい、オブジェクト指向ならではのプログラミング手法である。
E.2.4 Object 指向の欠点と有効性
実際に使っている言語で、これらの性質がどこまで実装されているかを見てみると、表
E.1 のようになる。継承や多相性といったオブジェクト指向ならではの性質を使おうとす
254
付録 E
関連する情報技術について
f77
C
f90
C++/Java
抽象化
×
△
△
○
カプセル化
×
×
△
○
継承
×
×
×
○
多相性
×
×
×
○
表 E.1: 従来の言語の object 指向対応表。C は struct を持っているので抽象化は可
能だが、struct は method を持てないのでカプセル化以降の要求は満たさない。f90
では、type 宣言で構造体が使える。しかし、この構造体も method を持っていない
と言う点で、C の struct と一緒です。f90 では、データの隠蔽がある程度出来る。
その意味でカプセル化に△をつけておいたが、これは限りなく×に近い△である。
れば、Fortran 90 でも不十分であることが分かる。そして、デザインパターンを見れば、
継承は随所に利用されているのである。
では、C や Fortran といった天文学者が使い慣れた言語で、こういったスマートな設計
を行なうことは本当に不可能なのだろうか。答えは、原理的には「可能」、実際上は「不
可能」である。原理的に可能という意味は、C++ のようなオブジェクト指向言語も、コ
ンパイラは最終的にはアセンブラコードを生成する。つまり、コンパイラの作業を人間が
代行すれば、言語仕様の上でオブジェクト指向性が保証されていなくても、そういった
コードを書くことは出来る。しかし、実際上は不可能である。それは、たとえば大規模な
数値シミュレーションコードを作成する場合に、Fortran を使わずにアセンブラで記述し
ようとは誰も思わないことを想像していただければ、容易に理解いただけると思う。∗3
Object 指向プログラミングも万能ではない。これを補う新たな試みも続けられている。
しかし、いまのところ今後 10 年程度以上標準として利用されるであろう、Object 指向
プログラミングに変わる新たなパラダイムは無い。従って、複雑なソフトウエアを構築す
る方法として、Object 指向プログラミングを利用するのが、現段階では唯一の解決法で
ある。
Object 指向の問題点は、二つある。一つは、プログラムはクラスの関係を表す一方実
際に動作に関わるのはオブジェクトの関係であるという点である。この解決策は、パター
ンを利用することである。パターンリストを章 E.5 に示すが、この問題を解決するために
はパターンを適用することが有効である。現代のプログラマーの仕事は、問題を分析し、
適用可能なパターンを当てはめることだと言い切る人さえいるくらい、「デザインパター
ン」は object 指向プログラミングにとって重要なものである。
∗3
Fortran コードをアセンブラにすることは原理的に可能であり、実際これはコンパイラがいつも行なって
いることである。
E.3 開発工程と UML
255
もう一つの欠点は、オブジェクト指向が現実を表すと言う意味が、「現実のある一つの
側面」を表しているに過ぎないことである。これに関しては、アスペクト指向など新しい
試みがされているが、今のところある程度長期にわたり業界標準の地位を維持できると期
待される技術は無い。しかしながら、アスペクト指向も Java をベースに開発されている。
従って、JASMINE プロジェクトの途中でこういった新たなパラダイムを利用すべき時期
が到来したとしても、Java をベースに開発を続けていれば、作成したソフトウエアの多
くのパーツは最低限の修正で利用可能であると考えられる。
Object 指向言語には数々の処理系が提案されているが、広く利用されているものは
Java と C++である。
C++は名前の通り C 言語にオブジェクト指向的拡張をほどこしたもので、そのために
広く広まったが、既存言語をベースにしているため Object 指向性が不完全であり、その
意味で欠陥言語と呼ばれる。オブジェクトがセルフタイプではなく、GC の実装がないこ
となどから、プログラミングも難しい。同様に既存言語をベースにしたものでは、pascal
ベースの Delphy や lisp ベースの Cross などがあるが、いずれも普及率はあまり高くな
い。Smalltalk は海外ではかなり利用されているが、日本ではあまり馴染みが無い。また、
インタープリター言語である。日本発のスクリプト言語 ruby も同じくインタープリタ言
語であり、動作速度に問題がある。∗4 。
E.3 開発工程と UML
E.3.1 UML とは
object 指向分析で注目されているのは、UML(Unified Modeling Language) と呼ば
れる図である。Language という名前がついているが、これは図、あるいは文書の書き
方を示したガイドラインという言い方が適している。もし、物理屋が名前を付けたら、
UMD(Unified Modeling Diagram) という名前になったことであろう。
これは、フローチャートのちょっと高級なものと思っていただいたらよい。実際、フロー
チャートに対応するもは、数種類の UML 図の一つとして、アクティビティー図という名
前で存在している。ただ、重要なことは、UML というのが目的のソフトウエア設計の考
え方を表すための図だということである。複数の人達で設計・構築するソフトウエア、あ
るいは部分的に外注するようなソフトウエアの場合、その考え方を正しく伝えておかなけ
れば、目的にかなったものは出来ない。そのためのコミュニケーションの道具としての図
が、UML 図である。従って、規格に従って書かないと、別の意味に解釈されて意志疎通
が出来ないことがある。また、ソフトウエアの備えた要件をビジュアルで理解できるとい
∗4
高エネルギーグループでは、ライブラリを ruby に移植する作業を進めている。
256
付録 E
実装図
関連する情報技術について
配置図
コンポーネント図
要求図
ユースケース図
振舞い図
コラボレーション図
シーケンス図
アクティビティ図
ステートチ
ャート
構造図
オブジェクト図
クラス図
ビューによる分類
論理
○
プロセス
usecase
○
○
○
○
○
○
○
○
○
○
実装
○
配置
○
表 E.2: 5 つのビューと UML 図の関係
うことが、UML の最も大きな利点と言えるでしょう。補足すると、UML 図はモデリン
グの図であり、ソフトウエアに限ったことではない。現実をモデルする段階から UML 図
は有効に使うことができる。
ソフトウエアと通常の「もの」作り大きな違いは、要件要求が随時変化するということ
である。自動車を作るとかビルを建てるとか言えば、だいたいどういうものが出来上がっ
てくるのか想像できるし、要件に対する要求も考えやすい。しかし、ソフトウエアは、あ
る程度出来上がって来ないと何が必要かが見えにくい。従って、出来上がってきたものを
見て、また要件が変わり、作り直して、また要件が変わりということが繰り返される。そ
のたび毎に、開発者、およびソフトウエアの発注元であるクライアントなどと、意志の
疎通をする必要がある。この様な意味で、UML の重要性は今後益々増大することと思わ
れる。
E.3.2 ビュー
複雑なシステムをモデリング場合、システムを説明するためには多くの違った側面から
見る必要がある。UML では、これを見方によって 5 つのビューに分類している。表 E.2
に 5 つのビューをまとめてある。
まず、ユースケースビューは、ユーザーや他のシステムの観点から、システムが提供し
E.3 開発工程と UML
なければならない機能を記述したものである。システムの使用法は、このビューにある多
数のユースケースで記述されており、このビューで記述した内容を提供する事がシステム
の最終目的になる。中核を成すビューであり, 他のビューはこの内容を反映して作られる
ため、顧客や設計者, 開発者およびテスターのためのビューである。
論理ビューは、システムがその機能をどのようにして提供するかを説明するビューであ
る。システムの内部構造に着目し、このシステムが提供すべき機能を表現している。クラ
ス・オブジェクト・関係などの静的構造および、ある機能を実現するためのオブジェクト
間でのメッセージのやり取りが記述されている。設計者と開発者のためのビューである。
実装ビューは、実装モジュールおよびモジュール間の依存関係を説明するビューで、開
発者のためのビューである。コンポーネントビューとも呼ばれる。
プロセスビューは、プロセスとプロセッサへのシステムの分割など、平行性や同期と
いったメカニズムに着目したビューである。効率的な資源の使用・並列実行・実行環境か
らの非同期イベントの処理を可能にする。システム開発者とインテグレーター(統合する
人)のためのビューといえる。並行性ビューとも呼ばれる。
最後に配置ビュー は、コンピューターや装置などの物理的な配置とそれらの接続を表
す。コンポーネントの物理アーキテクチャへの配置の仕方(各コンピュータ上でどのプロ
グラムやオブジェクトを動かすか)も表す。開発者・インテグレーター・テスターのため
のビューである。
E.3.3 UML 図各論
ユースケース図
ユースケースの書き方を図 E.1 に示す。ユースケースは、外部のアクター (あるいは
エージェント) がシステムを使って行なう一連のイベントを、通常の文章で表現するもの
である。
ユースケース名、アクタ、分類、説明のように書きます。始めに高水準のユースケース
を作り、あとに拡張ユースケースを作ります。拡張ユースケースには、目的、クロスレ
ファレンスなどが追加されますが、中でもイベントの典型的な順序として実際のアクター
の行動とシステムの応答を表にする点が最も重要である。
ユースケース図は、システム境界、アクター、ユースケースから作らる。
ユースケースは楕円の中にユースケース名を書く。UML1.1 では、ユースケース同士の
関係は後述の汎化関係と同一の記号で書かれたが、UML1.3 では記号が依存性を表す記号
に変わっている。矢印の属性として uses がついた矢印は、視点のユースケースを利用す
るには終点のユースケースも利用することになることを意味している。この他、extend,
257
258
付録 E
関連する情報技術について
図 E.1: 簡単なユースケース図の例。ユースケースはシステム境界の中である程度
まとまった手続きの固まりをユースケースとして捉え、システム境界の外部のアク
ター、あるいは内部のユースケース同士の関係を示す。この図は UML1.1 仕様に
従っているため、関連の矢印の形状が 1.3 のものと異なるが、これは汎化ではなく
関連であることに注意。
include などがある。なお、端が折れた紙のようなものは、コメントを書くもので、破線
で説明の対象となるものと結ばれる。
アクターは、利用者とかマネージャーとか、プログラムに外から作用を与えるものであ
る。システム境界は、そのシステムの境界をあらわす。通常システム境界としては、ハー
ドウエアとソフトウエアの境界がとられることが多い。ということは、アクターとしては
人間ではなくハードウエアが入るということも想定されることになる。
通常はユースケース図は利用者の視点で行なう。ユースケースに限って言えば、図より
も文書の方が役にたつ場合が多い。
クラス図
クラス図は、クラスの静的構造を表します。オブジェクト指向プログラミングでは、通
常はオブジェクトは生成・状態遷移・消滅を繰り返す。オブジェクトの構造は、動的に変
化する。
「クラス」は前にも述べたように「型」なので、この構造は変化しない。即ち、シ
ステムのどのライフサイクルを取っても記述された構造が常に成り立つという特徴を持っ
ている。これが、「静的」構造と言う意味である。
具体的には、属性と操作によるクラスの内部構造とともに、クラス間の関係、すなわち
関連 (相互接続)・依存・特化 (特殊化、逆の見方をすれば汎化)・パッケージ (グループ化)
を記述している。
図 E.2 に示すように、クラスは三つの四角形を重ねて表現する。上から名前、属性、操
E.3 開発工程と UML
図 E.2: クラス図でのクラスの表現。クラス図において、クラスはクラス名、属性、
操作を表す三つの四角形からなる。属性と操作は可視性を与えることが可能である。
また、クラスの性質を表すステレオタイプを適宜加えても良い。
図 E.3: class 図では、class 同士の関係を表現できる。複数のクラスの間の関係を表
現する。汎化関係は白三角形を先端に持つ矢印で、広い意味の集約関係は菱形を持
つ矢印で表現する。集約関係では多重度を表現できる。また、菱形が黒塗の場合は
複合、知ろ抜きの場合は集約である。
作を表す。名前には、ステレオタイプと呼ばれるクラスの型を指定することが出来る。ス
テレオタイプとしてどのようなものを許すかは、ユーザーが決めることが出来る。属性
と操作には、可視性が付与できる。また操作には戻り値や引数リスト、多相性 (virtual 関
数) などの性質を加えることが出来る。
クラスの関係には、関連、依存、汎化あるいは特化、ユニット化、集約などがある。
図 E.3 に示すように、あるクラスに別のクラスが含まれる場合は、含む方のクラス側に
菱形の根本をもつ線で含まれる方のクラスを指す。菱形が黒塗の場合は強い結び付きを表
す。強い結び付きとは、含む方のクラスのライフタイムが終了する時には含まれる方のク
ラスも消滅することを示す。この様な包含関係を、複合 (composite) と呼ぶ。一方、含む
259
260
付録 E
関連する情報技術について
図 E.4: ステートチャート、あるいは状態図は、オブジェクトの状態遷移を表す。状
態遷移を起こすアクションを矢印の上に表現できる。
側のクラスが消滅しても含まれる側のクラスが生き残る場合があるような弱い包含関係
を、集約 (aggregate) と言う。集約は白抜きの菱形で表す。また、包含関係には多重度を
書くことが出来る。
矢印は誘導可能性を表す。矢印のもとのクラスから矢印の先のクラスを特定できること
を表す。
線に数字、あるいは*印を書いて、多重度を表す。
オブジェクト図
オブジェクト図は、クラス図の変形で、クラスから生成されたオブジェクト(クラスの
インスタンス)が表される。この図によってインスタンスや関係がどのようになるのかを
把握できる。クラス図が、あるスナップショットでどう実現されているかということを表
す。名前は「オブジェクト名:クラス名」で記述する。また関係するインスタンスを全て記
入する。
最近は、ケースツールと言うものがある。これは、通常ソースコードと UML 図を相互
に変換するような機能を持っている。廉価なケースツールでは、オブジェクト図は作成で
きない。それは、オブジェクト図を書くには実行時のスナップショットにおいて、コンパ
イルドバイナリー・ソースコード・実行メモリーイメージの関係を把握する必要があるか
らである。数百万円する高価な物では、オブジェクト図を書くことが出来るものもある。
システムが複雑になると、この様なツールが威力を発揮する場合も容易に想定できる。
状態を表す図
ステートチャートは、クラスの説明を補足する。つまり、オブジェクトが取りうる全て
の状態と状態の変化を引き起こすイベントを表す。この図は通常クラス毎に作られる。明
確な場合は、もちろん省略して構わない。ここでイベントとは、時間と空間の中での意味
のある出来事である。例えば、時間経過や条件の成立など、アクションは、実行可能な文
で生成される一連の手続きを表す。
ステートチャートでは、図 E.4 のように黒丸が始状態、黒二重丸が終状態で、その間に
E.3 開発工程と UML
図 E.5: アクティビティー図は、昔フローチャートと呼ばれた図である。
四角で囲まれた状態がいくつかあるのが通常である。状態の遷移はラベルつき矢印で表
し、状態遷移毎に遷移を引き起こすイベントを記述する。
アクティビティー図は、図 E.5 に示すように、実行される仕事に着目したやり取りを示
す。だいたいの実行を含む一連のアクションとその仕事を担当するオブジェクトを表現し
ており、状態の移行に状態図ではイベントが必要なのに対し、アクションが実行されるだ
けで状態が移るダイアグラムである。ステートチャートではオブジェクトの状態遷移を記
述し、アクティビティー図ではオブジェクトが実行するアクションを一つの状態とみなす
点が異なる。アクティビティー図のアクションは、ステートチャートでの遷移をトリガー
するイベントに対応する。条件、並行実行、メッセージ仕様なども表現できる。
261
262
付録 E
関連する情報技術について
図 E.6: シーケンス図は、アクターの操作とオブジェクトの状態変化の時間的関係を表す図である。
相互作用図
シーケンス図とは、多数のオブジェクトの間の動的なコラボレーション (協調動作)お
よび相互作用を表す。オブジェクト間でやり取りされるメッセージの順序 (シーケンス) が
表現される。時間は上から下への流れで書かれることになっている。
シーケンス図は、図 E.6 のように、オブジェクトは名前付き四角で、破線でオブジェク
トの生存期間を表します。破線の上に、オブジェクトが実際に活性化している期間を表し
ます。メッセージはラベル付き矢印で、メッセージの返却は破線矢印で書かれる。
シーケンス図では時間的流れを協調したのに対し、コラボレーション図では、オブジェ
クトを主体として、多数のオブジェクトの間の動的なコラボレーション (協調動作)を表
E.3 開発工程と UML
図 E.7: コラボレーション図は、時間的流れよりむしろオブジェクトを主体とした複
数のオブジェクトの協調動作を示す図である。MagicDraw では、時間的流れをあら
わすシーケンス図とオブジェクト同士の協調動作を表すコラボレーション図をあわ
せて 3 次元的に表現することを可能にしている。
す。図 E.7 で示す通り、やり取りされるメッセージの他、オブジェクトとその関係(コン
テキスト)を表現できる。シーケンス図に似た役割ですが、時間・順序を強調するなら
シーケンス図・オブジェクトと関係を強調するならコラボレーション図と使い分けされて
いる。メセージラベルには、順序、条件、繰り返し、戻り値などを書く。
記号はほぼシーケンス図と同じで、オブジェクトは名前付き四角で、メッセージはラベ
ル付き矢印 ([条件] シーケンス番号:メッセージ) で書かれる。
コンポーネント図
コンポーネント図は、コンポーネント(物理的な実装)の間の依存関係を示す。他のコ
ンポーネントへの影響を解析する事を可能にするもので、プログラムを作成する際に使用
される。
ここで、コンポーネントとは「モデル要素のインスタンスの集まりを物理的にパッケー
ジした、再利用可能な部品」というのが定義である。論理モデルの要素の物理的な実装を
表すもので、論理アーキテクチャーで定義された概念と機能。
コンポーネント図とは、コード・コンポーネントの視点から、コードの物理的な構造を
表した図である。コンポーネントには、ソース・コード・コンポーネント、バイナリ・コ
ンポーネント、実行可能コンポーネントがある。コンポーネントをまとめてパッケージ化
することなどを考える場合に便利な図である。
図の要素は、図 E.8 に示すように、コンポーネントをコンセント型の図で、パッケージ
263
264
付録 E
関連する情報技術について
図 E.8: コンポーネント図は、複数のプログラムのコンポーネントや外部資源の関係
を表現するために利用する図である。コンポーネントのサイズはいろいろとり得る
が、コンポーネント図をサポートする多くの CASE ツールでは、ソースプログラム
のファイル一つ一つを一つのコンポーネントに対応させている場合が多い。
をタブつき長方形で、コンポーネント同士の関係をラベル付き線で表す。
配置図
配置図は、システム中のハードウェアとソフトウェアの物理的な構造を示す。コンピュー
タや装置と、その間の接続や種類を記述することが可能で、どの装置がどのソフトウェア
を使うのかが表される。ノードに実行可能コンポーネントやオブジェクトを割り当てるこ
とが出来る。また、コンポーネント図と同様に、コンポーネント(物理的な実装)の間の
依存関係も示すことができる。主に、ハードウエアとソフトウエアの関係を表すことに用
いられる。
E.3.4 CASE ツール
UML を用いてソフトウエアを開発し、あるいは分析するためのツールを、CASE ツー
ルと呼ぶ。CASE は Computer Aided Software Engineering の略である。このような
製品には、フリーのものからプロ用の 100 万円程度の高価なものまで約 50 種類ほどある
が、天文学分野では使用経験が無いので、どの程度のものが必要なのか、今後検討する必
要がある。
GAIA では Rational ROSE∗5 を使用しているが、これは 50 万円以上の高価なもので
∗5
Rational 社は、オブジェクト指向の仕様記述法を現在の UML という形に統一した Grady Booch 氏、
James Rumbaugh 氏、Ivar Jacobson 氏が所属する会社で、この分野では中心的役割を果たしてお
E.4 設計例
265
図 E.9: 配置図は、ハードウエアとソフトウエアの物理的構造を示す。
ある。これを導入できることは開発効率の著しい向上に繋がる。しかしながら、Rational
ROSE は高価で、コアチームのみに配布するにも 200 万円から 300 万円を要するため、
現段階では難しい。同じく定評あるソフトウエアに、Together Control Center がある
が、これも 50 万円から 100 万円の製品である∗6 。
幸い東 レ科 学振 興財 団か らの 助成 が得 られ たた め、MagicDraw 社の MagicDraw
UML∗7 を使用することとした。一ライセンス 20 万円程度なので、必要に応じて複数
ライセンスを購入できる。本報告書に記載されているいくつかの UML 図も、この製品を
用いて描画したものである。
266
付録 E
関連する情報技術について
電話網をシミュレーションする。複数の電話器と一つあるいは複数の交換機 (員)
を考える。ある電話器は番号を指定することにより、別の電話器と接続可能であ
る。電話器は交換機と回線で接続されていて、接続を確立するのは交換機の仕事
である。交換機は要求された電話器が接続されている電話回線が busy であるか
どうかを判断し、busy でない場合だけ接続を確立する。通常の電話器では双方
向通信を行なえるが、簡単のため通信形態はトランシーバーのように一方向通行
の切替えで良いことにする。
図 E.10: 例題としてとりあげる電話網の要求定義。
E.4 設計例
E.4.1 要求定義
オブジェクト指向の有用性を御理解いただくため、簡単な設計の例を示す。例題とし
て、交換機 (員) を含む電話網のシミュレーションを考える。要求定義を文書化すると、図
E.10 のようになる。
ここでは、黒電話からはじめて FAX や留守番機能のついた電話へ拡張する例、および
電話加入者数が増大した場合の交換システムの拡張について、例示する。この時、パター
ンの適用について述べるが、パターンについては次の E.5 章を参照していただきたい。
E.4.2 設計
要求定義の文章から、クラスの候補として「電話器」、「電話回線」、
「交換機」があげら
れる。しかし、接続形態を交換機と電話器が一つの回線で接続されている例に限定したた
め、「電話回線」は「電話器」の一つの属性として定義すれば十分で、クラスである必要
はない。従って、考えるべきクラスは「電話器」と「交換機」の二つということになる。
次に、それぞれのクラスが持つべき属性とメソッドについて議論する。
り、ソフトウエアの品質も非常に高い。日本法人日本 Rational 社で製品情報や価格表を公開している。
∗6
http://www.rational.co.jp/products/rose/index.html
日本では Techmatrix 社 http://www.techmatrix.co.jp/together/products/price/が 販売して
∗7
URL は http://www.magicdraw.jp。スタンダード版とプロフェッショナル版があるが、我々の目的に
いる。
はプロフェッショナル版が必要。
E.4 設計例
267
受話器
回線
ベル
状態名
up
busy
ring
–
up
busy
quiet
up
up
free
ring
–
up
free
quiet
–
down
busy
ring
ring
down
busy
quiet
–
down
free
ring
–
down
free
quiet
free
表 E.3: 電話器がとり得る状態
電話器
電話器としては、まず、簡単な黒電話から考える。電話器は、それぞれを区別する電話
番号 (id) を持つ。また、状態を表す属性 (state) が必要である。電話器がとるべき状態
は、受話器が上がっている (up) 場合と下がっている (down) 場合、回線が busy な場合と
free な場合、ベルが鳴っている (ring) 場合と鳴っていない (quiet) 場合の組合せで合計 8
通りである。しかし、その全ての組合せが実現するわけではなく、検討すると表 E.3 に示
す 3 通りの状態で十分である。それぞれを別の状態を表す変数として保持し、その整合性
を確保することも可能だが、今回はとり得る状態数が少ないので、とり得る状態の組合せ
を一つの状態として保持することにする。つまり、状態を表す属性は一つで、この属性が
ring, up, free の三つの値を取ることにする。
電話器はかならず 1 対 1 で接続されるものと仮定するが、交換機が接続中の id の関連
をテーブルとして保持する方法と、電話器が相手先の id を保持する二つの方法がある。
本来は交換機がテーブルを持つのだが、簡単のため相手先 id を電話器側に保持させ、電
話器オブジェクトをサーチしてテーブル検索を行なうことにする。
電話器の機能としては、ダイアルを回して相手先を指定する情報を送信ことと、音声を
送受信することが考えられる。しかしながら、実際の電話器においても、大昔の電話器
は直接ユーザーから交換種に対して音声で、黒電話ではパルストーンで、プッシュホンで
も PB 音でという違いはあるものの、いずれも番号通知は音声信号の上に何かの情報を載
せる形で行なわれている。従って、回線を最初に繋ぐ時に、状態を up にした後に送るべ
き数字情報の実現の方法が違うだけで、回線そのもの、交換機との接続方法そのものに
違いを持たせる必要はない。これを考慮して、電話器が持つべきメソッドは、次のように
268
付録 E
関連する情報技術について
acceptConnection
ring
establishConnection
requireConnection
free
up
hangup
図 E.11: 電話器クラスの状態遷移図の例。
なる。
requireConnection ダイヤルを回す等により交換機に相手先電話番号を通知して、接続を
要求する。このとき、状態は free から up になる。free 以外ではこの操作は出来ない。
acceptConnection 受話器をあげて接続要求に応じる。このメソッドは ring 状態でのみ
有効である。
isBusy 交換機の isBusy メソッドに応答して、電話器が現在 busy 状態であるかどうか
を交換機に通知する。busy でなければ、acceptConnection メソッドが起動するのを
待つ。
sendMessage 通話中に、こちらから相手にメッセージを送信する。このメソッドは up
状態でのみ可能である。
receiveMessage 通話中に、相手からこちらへのメッセージを受信する。このメソッドは
up 状態でのみ可能である。
hangup 通話を終了する。up 状態のどちらの電話器からでもこのメソッドは実行できる。
自身は up 状態から free 状態に戻り、hangup したことを交換機に通知して相手の電
話器も up 状態から free 状態に戻す必要がある。従って、このメソッドが交換機から
も呼ばれる必要がある。
このように、メソッドは状態によって使用可能だったり使用不可能だったりする。ま
た、メソッド自身が状態を変化させる必要がある。そのため、内部的には状態変化を司る
メソッドを別途用意するのが有効である。
状態変化は、図 E.11 のようになる。
E.4 設計例
269
phone
0..*
1
Telephone
-id : int
Operator
+disconnect( id1 : int, id2 : int ) : void
-state : int
+establishConnection( id1 : int, id2 : int ) : boolean
+acceptConnection() : void
+isBusy( id : int ) : boolean
+hangup() : void
+send( message : char[], id : int ) : void
#isBusy() : boolean
+receiveMessage() : char[]
+requireConnection( id : int ) : boolean
+sendMessage( message : char[] ) : void
図 E.12: 電話交換システムのクラス図の例。
交換機
establishConnection ベルが鳴る等によって、電話器に相手からの接続要求があることを
通知する。電話器の状態を、free から ring に変化させる。
disconnect 電話器の hangup を受け取り、双方の電話器の状態を変化させる。
send ある電話器から受け取ったメッセージを、相手先の電話器に送る機能を持つ。
isBusy establishConnection から起動され、相手先が busy かどうかを問い合わせる。戻
り値に従った動作を行なうため、boolean で値を返す必要がある。
次に、交換機の持つべき属性とメソッドを考える。通常交換機は複数の回線が接続されて
いる機械である。今、電話回線は電話器の一部分と考えたので、我々のモデルでは、交換
機には複数の電話器が接続されている形になる。交換機は、ある電話器からの接続要求を
受け取って、相手先の電話器が busy かどうかを確認し、free であれば接続を受け付け、
busy であれば接続を受け付けられない旨通知する必要がある。今回線は電話器が保持し
ているので、busy かどうかは電話器が応答すれば良い。従って、電話器は busy かどうか
を返す public メソッドが必要である。また、接続中の回線の一方が通信を切断した場合、
双方の回線に対して busy を free に変更する手続きが必要となる。
E.4.3 実装
通常の CASE ツールでは、最低限コードのスケルトンを作成する機能は持っている。
こう機能なものでは、作成したコードとモデルの間を行き来できる。MagicDraw UML
では、コードとモデルの関連付けはコードエンジニアリングセットという概念で表され
ている。始めに UML 図から書き始めた場合は、Tools から Code Engineering Sets を開
270
付録 E
関連する情報技術について
/**
* @(#) /my/work/directory/Telephone.java
*/
public class Telephone
{
private int id;
private int state;
public void acceptConnection( )
{
}
public void hangup( )
{
}
protected boolean isBusy( )
{
return false;
}
public char[] receiveMessage( )
{
return null;
}
public boolean requireConnection( int id )
{
return false;
}
public void sendMessage( char[] message )
{
}
}
/**
* @(#) /my/work/directory/Operator.java
*/
public class Operator
{
private Telephone phone;
public void disconnect( int id1, int id2 )
{
}
public boolean establishConnection( final int id1, final int id2 )
{
return false;
}
public boolean isBusy( final int id )
{
return false;
}
public void send( final char[] message, final int id )
{
}
}
図 E.13: 電話交換システムのコードスケルトン。
E.4 設計例
271
き、New で新規作成する。この後、Add Data from Model を選択し、Add Recursively
を選択すると、クラスに対応する Java ファイル名が生成される。この時、作業ディレク
トリーを指定しておくと、モデル情報の中にこれが保持される。ファイルの対応付けが出
来れば、コードを生成することが出来るようになる。上のクラス図から吐き出したスケル
トンは、図 E.13 のようなコードが生成されるであろう。後は、この中にメソッドを実装
して行けば良い。
なお、コード側を編集した結果をモデルにマージさせたい場合、Code Engineering
Sets の Reverse を用いる。また、Engineering Sets が生成されている場合は、コードの
中身を実装していればこれを壊さないようにモデルの変更を反映する。
E.4.4 拡張
次に、電話器に対する機能拡張を考える。FAX 付き電話器、留守番機能付電話器、
キャッチホンへの拡張を例示する。
現在の仕様では、電話器と交換機の仕様は整合している。もし、新たな機能を追加する
ために、電話器クラスを勝手に変更してしまうと、交換機との通信が不可能になるかも知
れない。そこで、機能拡張には継承を用いる。
ただし、我々が追加すべき機能は今のところ三つあるし、将来はもっと増えるかも知れ
ない。当然のことながら、複数の機能を合わせ持つ電話器も欲しくなってくる。従って、
単純に継承して実装すれば、FAX なしの留守番電話と FAX ありの留守番電話の双方に
留守番機能を実装しなければならなくなるし、留守番ありの FAX と留守番なしの FAX
の双方に FAX 機能を実装する必要が生じる。もし、FAX 機能や留守番機能に変更が加
えられると、いつもコードを複数箇所づつ変更する必要が生じる。即ち、保守性が悪く
なる。そこで、電話器は TelephoneDecorator クラスを継承し、これをさらに継承して
FAX 機能と留守番機能を実現する。そして、これに Decorator パターンを適用すること
により、コードの保守性が向上する。電話を改良する担当者は TelephoneDecorator の継
承クラスを作ることにしておき、Telephone クラスを直接触ることは禁止する必要があ
る。Telephone クラスを直接触れるのは、電話器と交換機の仕様の両方を知っている者だ
けである。図 E.15 は、Decorator パターンを適用したクラス図である。
また、加入電話の数が増大した場合、交換機はネットワークを形成して処理を分散する
必要が生じるであろう。
272
付録 E
関連する情報技術について
Telephone
Operator
-id : int
-phone : Telephone
-state : int
+disconnect( id1 : int, id2 : int ) : void
+acceptConnection() : void
+establishConnection( id1 : int, id2 : int ) : boolean
+hangup() : void
+isBusy( id : int ) : boolean
#isBusy() : boolean
+send( message : char[], id : int ) : void
+receiveMessage() : char[]
+requireConnection( id : int ) : boolean
+sendMessage( message : char[] ) : void
TelephoneDecorator
Catch
CareTaker
Fax
図 E.14: 電話交換システムに FAX 機能、留守番機能、キャッチホン機能を付
け加えた場合のクラス図の例。この図の Telephone クラスを選択し、Tools の
ApplyPattern を実行すると、Decorator パターンの実装が出来る。(図 E.15)
FAX 機能の要求
FAX は、受信信号が FAX のものであるかどうかをチェックして、自身のモードを変更
して音声信号を画像信号に読みかえて画像として出力する機能である。
留守番機能の要求
最初に設計した電話器は message を保持しないが、留守番機能は message を保持する
機能としてモデル化される。
E.5 Gang of Four のパターンリスト
273
Telephone
Operator
-id : int
-phone : Telephone
-state : int
+disconnect( id1 : int, id2 : int ) : void
+acceptConnection() : void
+establishConnection( id1 : int, id2 : int ) : boolean
+hangup() : void
+isBusy( id : int ) : boolean
#isBusy() : boolean
+send( message : char[], id : int ) : void
+receiveMessage() : char[]
+requireConnection( id : int ) : boolean
+sendMessage( message : char[] ) : void
TelephoneDecorator
+acceptConnection() : void
+hangup() : void
+receiveMessage() : char[]
+requireConnection( id : int ) : boolean
+sendMessage( message : char[] ) : void
+TelephoneDecorator( comp : Telephone )
CareTaker
Fax
Catch
+CareTaker( comp : Telephone )
+Fax( comp : Telephone ) +Catch( comp : Telephone )
図 E.15: 実際に Decorator パターンの実装した例。
キャッチホン機能の要求
一台の電話に接続できる回線の数が1または2になるので、交換機側の機能も変更され
る必要がある。
この例を見ていただくと、全体構成は視覚的に把握することが可能で、実際にコードを
実装すべき個別の機能は非常に単純なものに分析されていることが分かる。
E.5 Gang of Four のパターンリスト
こ の 章 で は 、情 報 科 学 分 野 の 4 人 組 み と 呼 ば れ る 著 者 の「 デ ザ イ ン パ タ ー ン 」
[Gamma et al., 1995](日本語版 [Gamma et al., 1999]) に収録されている 23 のパターン
274
付録 E
関連する情報技術について
のリストを示す。JASMINE シミュレーターに使用されるパターンについては、実際の使
用例などについても解説する。GoF では、パターンの利用意義として「共通の単語を提
供する」と言う点を挙げているので、パターンの説明に使用されるクラス名やメソッド名
は、GoF の文献に従う。
E.5.1 生成に関するパターン
生成に関するパターンは、オブジェクトの生成、組合せ、表現をシステムから独立にす
る手法を分析したものである。ここでは、オブジェクトを生成するサブクラス化すること
による方法 (Factory Method) と、オブジェクトコンポジションによってクラス生成をパ
ラメータ化する方法 (Abstract Factory, Builder, Prototype) を示す。
Factory Method
別名:Virtual Constructor。
オブジェクトを生成するときのインターフェースだけを規定して、実際にどのクラスを
インスタンス化するかの決定をサブクラスに任せる方法。実際のインスタンス化はサブク
ラスが行なう。生成のパターンとしては最も使いやすいもので、GoF の分析では、まず
この方法で実装した上で、必要があれば別の方法に移行することを勧めている。オブジェ
クト生成のパラメーター化をクラス構造で実現しているので、オブジェクトコンポジショ
ンによる方法と比べて柔軟性に乏しく、クラス数が増大する危険がある。
Abstract Factory
別名:Kit。
複数のウインドーシステムをサポートするような場合に、スクロールバーなどのユー
ザーインターフェースを生成するインターフェースのみを提供し、実際の動作を行なう具
象クラスと独立性を持たせる方法。ウインドーシステムの例では、新たなウインドーシス
テムへの対応、あるいは置換えが容易になる。このパターンは、図 E.16 のようなクラス
構造をとる。これにより、ウインドーシステムの変更は、ConcreteFactory クラスに対応
するメソッドを追加するだけで済み、AbstractFactory クラスとその継承クラスの構造を
大きく変更する必要はない。
E.5 Gang of Four のパターンリスト
275
AbstractFactory
AbstractProductA
AbstractProductB
図 E.16: AbstractFactory パターンのクラス図
Builder
複合オブジェクトを生成する場合、その作成過程を構成要素そのものやその組合せ方法
などに依存しないものにすることにより、同じ作成過程で異なる表現形式のオブジェク
トを生成できるようにする。Composite パターンのように多くの構成要素からなるオブ
ジェクトを生成する場合、その生成方法として利用される。
クラス図とシーケンス図を図 E.17 に示す。Product オブジェクトは、作成したい複合
オブジェクトを表す。Builder クラスは Product オブジェクトの構成要素を生成するため
の抽象化されたインターフェースのみを実装し、Director クラスは Builder クラスのイン
ターフェースを利用する。実際の生成は、ConcreteBuilder クラスにおいて実装される (
図 E.17 下)。
276
付録 E
関連する情報技術について
Builder
図 E.17: Builder パターンのクラス図とシーケンス図
E.5 Gang of Four のパターンリスト
277
Prototype
図 E.18: Prototype パターンのクラス図
図 E.19: Singleton パターンのクラス図
Prototype
Client クラスが、生成すべきオブジェクトの原型を持っておくことで、原型をコピーし
て新たなオブジェクト生成を行なうことが可能になる。多くの生成に関するパターンで
は、生成されるオブジェクトのクラス構造とパラレルな構造を持つ、生成のためのクラ
ス階層を保持することになる。Prototype パターンは、これを避けることが出来る。一
方、原型を保持する必要があることから、状態の組合せの数が多いと保持すべき原型も増
える。従って、再利用の回数が少なければ、非効率である。図 E.18 にクラス図を示す。
ConcreteProductotype のそれぞれが、Clone オペレーションを持つ必要がある。
Singleton
あるクラスに対してインスタンスが一つしか存在しないことを保証して、かつそれに
アクセスする方法を提供する。この方法では、static なインスタンスを用意し、生成は
278
付録 E
関連する情報技術について
Target
図 E.20: Adapter パターンのクラス図
Instance オペレーションを呼び出すことで行なわれる。Instance オペレーションは、す
でにオブジェクトが存在している場合はそのオブジェクトを返し、存在しなければコンス
トラクターを呼び出して生成した後に生成されたオブジェクトを返す。
E.5.2 構造に関するパターン
ここに示す 7 つのパターンは、大規模な構造を作る場合に、オブジェクトやクラスをど
のように組み合わせれば、再利用性や保守性を高められるかについて分析されたもので
ある。Adapter パターンと Bridge パターンは、オブジェクトに対する間接アクセスを提
供する。Composite パターンと Decorator パターンは、オブジェクトに多様性を持たせ、
かつ複雑になることを避ける手法を述べている。Facade、Flyweight、Proxy は、これら
のクラスの実装の中で適宜利用されることが多い。
Adapter
別名:Wrapper。
既存のクラスライブラリ持っているインターフェースと、Client が必要とするインター
フェースが一致していない場合、あるいは今後ライブラリがどのようなインターフェース
を持つべきか予め決定できないような場合に、Adapter パターンは互換性の無いインター
フェースを組み合わせる手段を提供する
図 E.20 で、Target クラスがインターフェースを持つ抽象クラスであり、クライアント
はこれを利用する。インターフェースの適合は Adapter クラスが行なう。それにより、ラ
イブラリ、クライアント双方がインターフェースを柔軟に変更することが可能となる。こ
のパターンは、例えば実際のグラフィックスオブジェクトの実装とメニューの上での実装
E.5 Gang of Four のパターンリスト
Abstraction
279
Implementor
図 E.21: Bridge パターンのクラス図
が異なる場合などに、二つのクラスを結合するために用いられる。多重継承をもちいて実
装する方法もあるが、Java は多重継承を許さないので、ここでは省略する。
Bridge
別名:Handle/Body。
抽出されたクラスと実装を分離することで、双方を独立に変更できるようにする。
Bridge パターンと Adapter パターンはともに間接アクセスを可能とし、インターフェー
スの変更を行なうという結果をもたらす。これらの違いは、Adapter パターンの方はイン
ターフェースを変換することが目的であり、既存のインターフェースに適用される、即ち
設計が完了した段階で適用されるものである。一方このパターンは、双方を独立に変更で
きるようにすることが目的なので、仕様が定まる前に利用されることが多い。
実際の分離方法は、図 E.21 のように、Implementor クラスのサブクラスである Con-
creteImplementor クラスが行ない、Abstraction クラスがインターフェースと Implementor クラスへの参照を持つ。RefinedAbstraction クラスの実装により、インターフェース
の拡張も可能である。
このパターンは、実際に Sun, IBM, Microsoft, Unix の X など複数の Window システ
ム上で稼働するグラフィックソフトウエアに用いられている。ベースとなるグラフィック
インターフェースの違いを吸収するために使われる。
Composite
オブジェクトの木構造、あるいは部分全体階層を実現するための方法。得たいオブジェ
クト構造が図 E.22 下のような木構造あるいは部分– 全体階層であるばあい、図 E.22 上の
ようなクラス階層を作ることで、これが実現可能である。抽象クラス Component が具象
280
付録 E
関連する情報技術について
Component
図 E.22: Composite パターンのクラス図 (上) とオブジェクト図 (下)。
クラス Leaf と Composite を持ち、Composite クラスは Component クラスへの参照と、
図に示すような Operation() 関数を実装することで、木構造への再帰的アクセスを実現で
きる。Composite パターンにより、クライアントは、対象が個々のオブジェクトである
か、あるいはオブジェクトを合成したものであるかを区別せずに、一様に扱うことが出来
るようになる。
composite パターンは多くのオブジェクト指向プログラムで利用されているが、例えば
以下のような利用例がある。画像エディターを作成することを考える。通常、画像エディ
ターには線のほか、丸、四角、文字程度のプリミティブな要素しかない。当然これらは拡
E.5 Gang of Four のパターンリスト
281
Component
Decorator
図 E.23: Decorator パターンのクラス図 (上) とオブジェクト図 (下)。
大、縮小、回転、色付け、コピー、移動などの機能を有する。しかし、実際にはユーザー
はこれらを組み合わせて、様々な画像を作る。ユーザーは、一度作成した画像を再利用す
るためにコピーしたり、また拡大縮小などの機能を、プリミティブな要素同様に行なえる
ことを期待するだろう。そのため、画像要素を composite パターンで作成しておけば、こ
の期待にこたえることができる。また、テキストエディターにおいても、カラム、行、文
字と言った階層構造を表現するのに利用される。
Decorator
別名:Wrapper。
オブジェクトに責任を動的に追加する。機能拡張については、サブクラス化を利用する
よりも、このパターンを利用する方が柔軟で、またクラス数の増大を防ぐことが出来る。
実装は、図 E.23 のようなクラス階層を用いる。Decorator クラスは Component への参
照を持つ。
282
付録 E
関連する情報技術について
Decorator パターンはいわゆる透明な囲いを与えるパターンとして利用される。例えば
テキストエディターにおいて、境界線を与えたりスクロールバーを与えたりといった機能
を追加する場合、ものとクラスが持っている様々な機能を継承しながら、特定機能につい
てだけ追加を行なう。もしこれをクラスの継承で実現するとすると、装飾の組合せの数だ
けクラスが必要となるが、Decorator パターンを用いて object composition で実装すれ
ば、装飾の数だけのクラスを作成すれば済む。また、グラフィカルなアプリケーションに
留まらず、例えば出力ファイルの形式として、日本語コードと異なる複数のファイル圧縮
形式をサポートしようとする場合、継承を使えば日本語コードの数と圧縮形式の数の積の
数だけクラスを実装する必要があり、多くのコードは共有可能となる。Decorator パター
ンを用いれば、コードの数と圧縮形式の数の和だけのクラスを実装すれば良く、コードの
重複は避けられるので保守性も向上する。
Facade
複雑なオブジェクト構造を持つシステムに対して、これらを一つのサブシステムとみな
して、サブシステム内に存在する複数のインターフェースに対して、一つの統一インター
フェースを与える。これによって、クライアントはサブシステムの中身を詳細に知る必要
が無く、入口 (Facade) オブジェクトの仕様だけを知っていれば良いことになる。従って、
サブシステムの利用を容易にする。
Flyweight
多数の細かいオブジェクト個別に実装するにはコストがかかり過ぎる場合、効率良く実
装することを可能にするため、共有を利用する。例えば、英文エディターあるいはワープ
ロでは、個々の文字がオブジェクトとなるが、フォント情報まで含めて個別のオブジェク
トに持たせることはコストがかかり過ぎる。この場合、Flyweight パターンを用いて、必
要最小限のもの以外の共有可能な情報を共有することで、効率を高めることが出来る。
Proxy
別名:Surrogate。
あるオブジェクトへのアクセスを制御するために、そのオブジェクトの代理となるもの
を提供する。例えば、ワープロ中の図などは大きなオブジェクトであり、生成にコストが
かかる。こういったものを代理の物で置き換えておくことで、操作性を確保できる。
E.5 Gang of Four のパターンリスト
283
E.5.3 振る舞いに関するパターン
ここで述べる振る舞いに関する 11 のパターンは、変化をカプセル化したり、オブジェ
クト同士の通信をカプセル化する目的で用いられる。
Interpreter
アブストラクトシンタックスツリーで表現されるような文法を持つ言語を解釈する場
合、例えば正規表現の解釈の場合などに、文法表現を、それを使用して文を解釈するイン
タプリターを一緒に定義する。
Template Method
一連のオペレーションの中で、振る舞いが変化する可能性がある部分が存在する場合、
親クラスでは不変な部分を定義しておいて、変更され得る部分はスケルトンで定義してお
く。スケルトンの実装をサブクラスに任せることにより、全体のアルゴリズムの構造を変
えずに、部分的な変更を実装できる。
Chain of Responsibility
複数のオブジェクトに要求を処理する機会を与えることにより、要求を送信するオブ
ジェクトと受信するオブジェクトの結合を避ける。
Handler クラスにインターフェースを定義し、実装を ConcreteHandler クラスに任せ
る。successor によってチェーンを作ることで、担当する部分の要求だけに応えてさらに
残りの要求を別のオブジェクトに引き渡すことが出来る。(図 E.24)。例えばヘルプの実
装などではこの方法が利用される。ヘルプのアクションを受け取ったオブジェクトは、必
ずしも表示方法を知らない。最終的にメッセージを表示できるオブジェクトまで、順次
チェーンに沿って要求を渡してゆくことで、この問題を解決できる。
Command
別名:Action、Transaction。
要求をオブジェクトとしてカプセル化する。これにより、異なる要求や、要求からなる
キューやログにより、クライアントをパラメータ化する。また、Command パターンを利
284
付録 E
関連する情報技術について
Handler
図 E.24: Chain of Responsibility パターンのクラス図 (上) とオブジェクト図 (下)。
用することで、取消可能なオペレーションをサポートする。
クラス図とシーケンス図は、図 E.25 のようになる。Command クラスが抽象化され
たインターフェースを持つ。Invoker は、Command クラスに対して要求を出す。Client
クラスは Command クラスのサブクラスである ConcreteCommand クラスを生成し、
Receiver オブジェクトを設定する。ConcreteCommand クラスは、Receiver クラスに対
してオペレーションを呼び出す。このパターンは、多くのオブジェクト指向プログラムの
中で、特に取消可能な操作を実装するために用いられている。
Iterator
別名:Cursor。
集約オブジェクトにたいして、その要素に順にアクセスする方法を提供する。Iterator
パターンを利用すれば、集約オブジェクトは基にある内部表現を公開せずに、この操作を
行なうことが出来る。
E.5 Gang of Four のパターンリスト
285
Command
図 E.25: Command パターンのクラス図 (上) とシーケンス図 (下)。
Mediator
例えばメニューボックスでは、ボタンと入力欄や選択欄が依存関係を持つ。ファイル選
択のリストボックスからファイルを選択すれば、ファイル名の入力欄には自動的に名前が
入力される。またあるボタンを選択することで有効となるウィジェットを作成したい場合
がある。このような場合、ボタンやリストボックスを別々のオブジェクトとして実装する
ことで、再利用性が高められる一方、オブジェクト同士の結合度が高くなる欠点がある。
そこで、個々のオブジェクトを仲介するオブジェクトを定義することにより、個々のオブ
ジェクトは仲介オブジェクトとだけ相互作用をし、明示的に参照し合うことがないように
して、結合度を低めることが出来る。
リストボックスや入力フィールドと言ったウィジェッとは全て Widget クラスのサブ
286
付録 E
関連する情報技術について
クラスとして実装する。抽象クラス Mediator とその具象クラス ConcreteMediator が、
Widget が Mediator を保持し、ConcreteMediator が Widget の具象クラスを保持する
ように作ることで、相互の協調動作を実現する。
Memento
別名:Token。
取消アクションなどをサポートする場合には、オブジェクトの内部状態を保存する必要
が生じる。そこで、client のオブジェクトの要求により、オブジェクトの状態を保存し、
あるいは回復する機能だけを持つオブジェクトを用いることで、後でオブジェクトを元の
状態に戻すことができるようにする。
Observer
別名:Dependents、 Publish-Subscribe。
相互に依存関係があるようなオブジェクト、例えば数値を入力する表とそれを表示する
複数のグラフがある場合、あるオブジェクトが更新されたことを、別のオブジェクトが知
り、自分の状態を更新する必要がある。そのため、状態の変化を観測し、変化の存在を通
知するようなオブジェクトを用意することで、複数のオブジェクトの整合性を保つことが
出来る。
State
別名:Objects of States。
TCP ネットワークなどでは、内部状態 (Listen, Established, Closed) によりその振る
舞いが変わる。一般に、状態の数が限られていて、状態によって大きく振る舞いが変わる
ような場合、状態をクラス内部で保持するのではなく、状態を表すオブジェクトを挿入す
ることで、状態による振る舞いの変化が容易に実現できる。
Strategy
別名:Policy。
抽象的なアルゴリズムのためのインターフェースを定義し、具体的なアルゴリズムをそ
のサブクラスとして継承するクラス構造を作ることにより、アルゴリズムの交換を容易に
することが出来る。
E.6 その他の情報技術
287
Strategy
図 E.26: Strategy パターンのクラス図
図 E.26 のように、Context クラスは Strategy クラスの AlgorithmInterface メソッド
を呼び出すことによって、アルゴリズムを実行する。実際にどのアルゴリズムが起動する
かは、ConcreteStrategy のどのクラスがインスタンス化されているかに依存する。この
Strategy パターンを利用することで、アルゴリズムを、それを利用するクライアントか
らは独立に変更することが可能になる。
例えばテキストエディターにおいて行やカラムなどの整列アルゴリズムを後から容易に
変更可能なようにするために、実際に利用されている。この方法はアルゴリズムをカプセ
ル化する一般的な方法であり、例えば金融商品の価格変動評価のアルゴリズムをカプセル
化したり、グラフィカルな設計システムにおいて最適な線を引くアルゴリズムをカプセル
化するなどの応用がある。
Visitor
例えば Composite パターンで表現されるような、あるオブジェクト構造の上の要素で
実行されるオペレーションを表現する。
E.6 その他の情報技術
E.6.1 分散オブジェクト技術
本文の中でも我々は基本的に Java を用いることを述べている。しかし、天文学研究者
にとって、この言語は必ずしもよく知られているものではない。そして、Java の最大の
特徴は、コンパイル結果が Java バイトコードと呼ばれる中間形式で書かれ、通常の計算
機言語のように native オブジェクトコードを持たないことである。従って、Fortran や
C といった天文学者に良く知られた言語で作られたプログラムを利用する場合は、C と
288
付録 E
関連する情報技術について
Fortran をリンクするようなわけには行かない。
この問題の解決方法には、二つある。一つは Java Native Interface(JNI) を用いる方
法である。Java はバイトコードと呼ばれる中間形式のコードを持つが、これに対して通
常のプログラミング言語は計算機に依存した実行コードを生成する。こういったコードを
native コードと呼ぶ。JNI は、Java の側で、ある API を用いることにより、native コー
ドに対するインターフェースを提供する方法である。native コードを利用するため、可搬
性は失われる。一方一部の開発者の負担だけでリンク作業を完了できる利点があるため、
GAIA で採用されている。
もう一つは Object Request Broker(ORB) を用いる方法である。これは、Java の側で
も C や Fortran といった native な言語の側でもある仕様に準拠した方法でメッセージを
交換できるように変更するアプローチである。既存コードに対してもある種の呼び出し手
続きを定義する必要があるため、場合によっては既存コードのインターフェース部分に立
ち入って変更する必要がある。一方、基本が分散オブジェクト技術であるため、並列化な
どを共通の枠組みで考えられる利点がある∗8 。
これらの利点と欠点を整理し、仕様の成熟度などを判断し、JASMINE では ORB によ
る統一的な枠組みを採用する予定である。なお、オブジェクト指向技術では、オブジェク
ト間の責務の割当と通信量に配慮してプログラミングを行なう。分散オブジェクト技術の
場合、そういった枠組が、プログラムの上から通信量とオブジェクト同士の依存性の把握
を可能にし、分散するオブジェクトをどう配置するかの指針を与える。これは、一般のシ
ミュレーションにおいても、並列化効率を論じるのに好都合である。数値シミュレーショ
ンの分野でも、積極的にオブジェクト指向技術を用いた方が良い理由の一つは、ここに
ある。
E.6.2 CVS
巨大コード開発は共同作業となるため、ある種のコード共有・バージョン管理のツール
が必要となる。多くのフリーのプログラム開発では、CVS が利用されており、JAMINE
でも cvs サーバーを立ち上げている。
E.6.3 XML
今後も、構造化文書にたいする需要は継続すると思われるが、この標準として今は
XML という形式が利用可能である。XML はメタ言語で、そのためのパーサーや変換プ
∗8
GAIA では、native コードとのリンクに JNI を使用しているため、並列化は Remote Method Invocation(RMI) と呼ばれる別の技術を用いて解決している。
E.7 情報用語一覧
289
ログラム XSL の仕様などが定められている。従って、XML でかかれて文書型が定義さ
れていれば、簡単に読み込むことが可能であり、さらに別の文書型の XML や HTML へ
の変換が容易である。さらに、適切な XSL で Formatting Object(FO) へ変換すれば、
pdf や rtf(Windows rich text file、Microsoft Word で読み書き可能) への変換の道具も
用意されている。
E.6.4 Web サービス
このようなプロジェクトにとって、情報の共有は特に重要である。この点は、Web サー
ビス技術を用いて対応する。現在、JASMINE のホームページでは XML ページのテスト
を行なっている。
E.6.5 テスティングフレームワーク
1999 年ころより、eXtreme Programming(XP) ということがいわれるようになった∗9 。
これは、具体的な技術というよりはプログラム開発の考え方、哲学といったものをさすの
だが、この中で近年注目されいてる技術に、テスティングフレームワークというものがあ
る。テストコードを実装し、頻繁にテストを行なうことを推奨するとともに、これを自
動化するツールがいくつか提案されている。Java では junit が、C++では cppunit が、
Web ページ作成には httpunit がといった具合である。そこで、我々も junit を開発ツー
ルとして導入する。junit は、build ツールである ant と併用することが効果的である。
E.7 情報用語一覧
• オブジェクト指向
Object 指向 ソフトウェアの設計や開発において、操作手順よりも操作対象に重点を
置く考え方で、現在の大規模コード開発ではほとんどの分野で利用されている。
関連する一つあるいは複数のデータと、それに対する手続き (メソッド) を「オ
ブジェクト」と呼ばれる一つのまとまりとして管理し、その組み合わせによって
ソフトウェアを構築する。オブジェクトは、利用に際してその内部構造や動作原
理の詳細を知る必要はなく、外部からメッセージを送れば機能するため、特に大
規模なソフトウェア開発において有効な考え方であると考えられる。データと操
作を一まとまりにする考え方が、現実世界の「モノ」になぞらえた考え方である
∗9
この XP という略語は、Windows XP や Athlon XP の XP とは異なる。Windows XP はユーザーに
新しい体験をしてもらうという eXPerience の意味で、Athlon XP は eXtreme Performance の意味
で利用されている。
290
付録 E
関連する情報技術について
ことから、「オブジェクト」指向と呼ばれる。個々の操作対象に対して固有の操
作方法を設定することで、その内部動作の詳細を覆い隠し、利用しやすくしよう
とする考え方と言える。この考え方を応用したプログラミング技法を、オブジェ
クト指向プログラミング (OOP) と呼ぶ。ただ、オブジェクト指向の考え方にも
限界があるとされ、アスペクト指向や MixJuice など新しいパラダイムが提案さ
れている。Simula、 Smalltalk、 C++、 Java などが代表的なオブジェクト指
向言語である。
Simula Ole-Johan Dahl と Kristen Nygaard によって、1962 年から 1967 年にか
けて開発された言語。Smalltalk より早く、初めてオブジェクト指向の考え方を
実装した言語である。
Smalltalk 1972 年から 1980 年にかけて開発およびバージョンアップされた言語。
Xerox 社パロアルト研究所 (PARC) で Alan Kay 氏らによって開発され、1980
年に Smalltak-80 が発売された。インタープリタ言語である。日本ではあまり馴
染みが無いが、欧米では商用ソフトウエアでも実装に利用されている。
C++ C 言語にオブジェクト指向的な拡張を施した言語。1980 年ころの「クラス付
きの C」から C 言語の拡張が始まり、1983 年から 1984 年までに、C++として
まとめられ、発表された。C の上位互換であることから、良く利用されている
が、それに伴う問題点も多い。
UML Unified Modeling Language の略。オブジェクト指向のソフトウェア開発にお
ける、プログラム設計図の統一表記法として、現在では多くのプログラマーから
必須の技術として受け入れられている。。Rational Software 社の Grady Booch
氏、James Rumbaugh 氏、Ivar Jacobson 氏の 3 人によって開発された。従来、
オブジェクト指向設計の表記法は 50 以上の規格が乱立していたが、1997 年 11
月に OMG によって UML が標準として認定された。Microsoft 社や IBM 社、
Oracle 社、Unisys 社などの大手企業が支持を表明している。
AOP Aspect-Oriented Programming の略。アスペクト指向プログラミングは、
Xerox の Palo Alto 研究所のプロジェクトとして研究されている。ある抽象化
はあるアスペクトをうまく捉え十分に動いても、他のアスペクトでは同じように
うまく捉えては動かないと予想される。そこで、AOP を用いれば、システムの
挙動の様々なアスペクトを最も自然な形でプログラミングすることができ、別
個のプログラムが編み込まれて実行コードを生成する。AOP は一般的な目的
(general purpose) 言語と特定ドメイン (domain specific) 言語の文脈で研究され
ており、そのどちらにも有用であろうと考えられている。(例えば、オブジェク
ト指向プログラミングのような) モジュール型のプログラミングでは、ソースの
コードからコンパイルされたコードへ単純なマッピングがなされている。コンパ
E.7 情報用語一覧
291
イラの最適化の効果を無視すれば、ソースにおいて連続するコードは、そのまま
計算機上で連続したコードとなる。ソースの一行を変更すると、結果として、バ
イナリコードに線形の効果を与えるといえる。アスペクト指向プログラミングを
用いれば、ソースコードからコンパイルされたコードへの直接的なマッピングと
いう制約を受けなくなる。アスペクト指向プログラムのある一行の変更は、コン
パイルされたコードに対して非線形に効果を与える。この違いは、非常に強力な
プログラミングシステムを生み出す。なぜなら、プログラムを通してもつれあっ
ているプログラム全体の特性 (global program property) は、アスペクトとして
別個に表現され得るからである。
GC garbage collection の略。プログラムが使用しなくなったメモリ領域や、プロ
グラム間の隙間のメモリ領域を集めて、連続した利用可能なメモリ領域を増や
す技術。OS の機能として実装される他、オブジェクト指向など動的なメモリー
割当の激しいプログラミングでは、アプリケーションプログラムの中でも実装
することがある。Virtual Machine で動作する Java のような言語では、Virtual
Machine がこの機能を持っている場合が多い。
• JAVA
Java Sun Microsystems 社の開発したプログラミング言語。C 言語に似た表記法を
採用しているが、新たに設計し直された言語であり、今までの言語にない完全な
オブジェクト指向性を備えている。また、強力なセキュリティ機構や豊富なネッ
トワーク関連の機能が標準で搭載されており、ネットワーク環境で利用されるこ
とを強く意識した仕様になっている。Java で記述されたソースコードは Java バ
イトコードと呼ばれる中間形式にいったん変換され、この状態で配布される。実
行時には Java 仮想マシンと呼ばれるソフトウェアによって、そのプラットフォー
ムで実行可能な形式 (ネイティブコード) に変換され、実行される。バイトコー
ドによる可搬性を得た反面、これが実行速度の点でオーバーヘッドになる点、ま
たどのプラットフォームでも動作させるために最大公約数的な機能しか使用でき
ない点などが難点とされる。機能上の欠点を補うため、Microsoft 社のように、
特定のプラットフォーム (例えば Windows) でしか動作しないがその分高速で、
プラットフォーム固有の強力な機能を利用できる Java 開発環境を提供している
メーカーもある。1999 年には全面的に新しくなった Java 2 が発表され、多くの
新たな機能が追加された。
Java2 Java のバージョンは、Java Developpers Kit のバージョンで呼ばれている。
JDK1.1 から JDK1.2 の間で大きな仕様変更があり、1.2 以降のものを総称して
Java2 と呼ぶんでいる。2003 年 1 月 7 日現在の最新バージョンは、1.4.1 であ
る。Java2 には大きく 3 つのセットがある。J2SE(Java 2 Standard Edition) と
292
付録 E
関連する情報技術について
よばれるものは、基礎となる標準的な機能をまとめたもので、パソコンなどの
ネットワーククライアント環境、あるいはスタンドアローン用途向けと言うこ
とができる。J2ME(Java 2 Micro Edition) は、家電製品や携帯情報端末、携帯
電話などの組み込み機器向けの機能をまとめたもの、J2EE(Java 2 Enterprise
Edition ) は、標準機能セットの Java 2 Standard Edition(J2SE) に、サーバ用
の API や諸機能を付加したものである。1.3 は多くのプラットフォームに移植さ
れて仕様可能だが、1.4 への対応が遅れているプラットフォームもあるようであ
る。1.3 と 1.4 の間で CORBA の API が変更されている。
JNI Java Native Interface の略。Java 言語で開発されたプログラムから、他の言語
で開発されたネイティブコード (特定のプラットフォームでそのまま実行可能な
プログラム) のプログラムを利用するための API。
Java RMI Java Remote Method Invocation の略。Java で分散オブジェクト環境
(異なるマシン間でオブジェクト同士がメッセージをやりとりできる環境) を実現
するための手法。JDK1.1 以降に標準で付属する。ネットワークを通じてプログ
ラム同士が通信を行うことができるようになる。
JDBC Java DataBase Connectivity の略。Java プログラムからデータベースを操
作するための API。IBM 社が開発したデータベース操作用言語である SQL 言語
による命令を発行してデータベースの操作を行なうことができる。SQL は ANSI
や JIS で標準化されている規格で、データベースの種類によらない汎用性の高い
プログラムを開発することが可能である。
• 分散オブジェクト技術
ORB Object Request Broker の略。異なるマシン上に分散して存在するオブジェ
クト (プログラム部品) 間で、データや処理要求などのメッセージをやりとりす
る際に用いられる仲介ソフトウェア。業界団体である OMG が CORBA として
標準仕様を提案しているほか、平野氏の HORB など、いくつかの実装がある。
CORBA Common Object Request Broker Architecture の略。OMG が定めた分
散オブジェクト技術の仕様。異機種分散環境上のオブジェクト (プログラム部品)
間でメッセージを交換するためのソフトウェア (ORB と呼ばれる) の仕様を定め
ている。Linux で多く利用されているウィンドーマネージャーである gnome が内
部で利用している ORBit は、C++を始めとする多くの native 言語で CORBA
を利用できるようにするためのオープンソースライブラリである。CORBA 準
拠の製品リストは、OMG(Object Management Group) のホームページで参照
できる。
IIOP Internet Inter-ORB Protocol の略。分散オブジェクト技術の規格の一つであ
る CORBA に準拠して定められた、異なる ORB 間でメッセージを交換するた
E.7 情報用語一覧
293
めのプロトコル。IIOP を使うと、インターネットなどの TCP/IP 接続された複
数のコンピュータに分散配置されたオブジェクト同士が、機種の違いやプログラ
ミング言語の違いを超えて、互いにデータの受け渡しをしたり、処理を依頼した
りすることができる。
COM Component Object Model の略。Microsoft 社が提唱する、部品化されたプ
ログラムを作成・利用するための基盤となる技術仕様。特定の機能のみを持つプ
ログラム部品を組み合わせることでアプリケーションソフトの開発が容易にな
る。COM コンポーネント (この仕様に基づいてデータのやりとりができるプロ
グラム部品) は開発に使った言語やコンポーネントのある場所などに拠らず、ど
の言語からでも、どこからでも利用することができる。ネットワークを通じて別
のコンピュータ上にある COM コンポーネントを利用する技術を DCOM と言
う。これらの技術は Windows の他、UNIX や Mac OS にも移植されている。
• バージョン管理
CVS Concurrent Versioning System の略。ファイルのバージョンを管理するアプ
リケーションソフト。主にプログラムの開発作業などで使用されるが、CVS 自
体はどんなファイルでも管理できる。複数人が同時に同じファイルを編集するこ
とができ、編集した内容が競合していなければ両方の変更を自動的に統合でき
る。また、1 つのバージョンに対して別々の変更を加えるためにバージョンを分
岐させることも可能など、多様な開発ニーズに対応できる機能を備える。CVS
は、多くのオープンソースソフトウェアでも採用されている。ただし、変更の管
理は RCS を踏襲しており、同一ファイル内の変更のみがサポートされている。
このため、ファイル名の変更やディレクトリーの移動などには対応できない難点
があり、これに対応するものとして subversion が開発されている。
subversion CVS が持つ機能の実現、ディレクトリ、リネーム、ファイルのメタデー
タなどのバージョン管理、バイナリの効率的な取り扱いを、WEBDAV プロトコ
ルの上で実現する。Subversion は、mod dav fs と同じ部分に位置するバックエ
ンドモジュール(mod dav svn)。バージョニング機能を提供するものという意
味で「バージョニングプロバイダ」と呼ばれる。
webdav Web-based Distributed Authoring and Versioning の 略 。RFC 2291
「WWW に お け る分 散 オー サ リ ング お よび バ ージョン 管 理 プロ ト コ ルの 要
件」(注 1)で提唱され、RFC 2518「分散オーサリングのための HTTP 拡張
–WEBDAV」(注 2)で具体的に定義されているプロトコルの名称。ネットワー
クによる分散環境下での Web コンテンツなどの編集(Authoring)やリビジョ
ン管理(Versioning)を行うことを目的に規定されたプロトコル。
• 構造化文書
294
付録 E
関連する情報技術について
XML eXtensible Markup Language の略。データをネットワーク経由で送受信す
るための言語。XML 1.0 は 1998 年 2 月に W3C 勧告となった。XML はコン
ピュータ同士でのデータの送受信に使用できるほか、Web ブラウザで直接閲覧
することも想定され、表現を記述する XSL などが用意されている。XML 文書
の構造を規定するいわゆるスキーマ言語に関しては、現在は DTD が良く使わ
れており、また W3C では XML Schema を策定中であるがなかなか進んでいな
い。DTD に変わるものとして、RELAX という国産のスキーマ言語も提唱され
ている。
XML パーサ XML 文書を解釈するプログラム。XML では形式が定められている
ので、個別のソフトウエアに XML を解釈するプログラムを持たせるのではな
く、汎用的な XML パーサを介して XML 文書の構造を解釈させるのが一般的で
ある。
XSL eXtensible Stylesheet Language。Microsoft 社、Inso 社、Arbor Text 社の三
社を中心として提案された、XML の見栄えを記述する言語。
XSLT XML Stylesheet Language Transform の略。XML で書かれた文書を他の形
式に変換するための簡易言語。この簡易言語による処理を実行するソフトウエア
を、XSLT プロセッサと呼ぶ。XML の規格制定に関わっている James Clark 氏
の配布している xt や、apache で開発された xalan などがある。
XMI XMI は XML Metadata Interchange の略で、XML を使って UML で定義さ
れたメタモデルやモデルを交換する仕組みである。XMI は、MOF(Meta Object
Facility) と呼ばれる、相互に取り扱い可能なメタモデルに共通のインターフェー
スと意味付けを定義するモデル作成言語を使って、UML の情報を XML に焼き
なおして、データ交換を可能にする。1998 年 11 月 11 日、米国の IBM、ユニシ
ス、オラクル 3 社が、カリファルニア州で開催された OMG の年次総会で、XMI
の最終案を公開した。
• 文字コード
Unicode Apple 社、IBM 社、Microsoft 社など米国の情報関連企業が中心となって
提唱し、1993 年に国際標準化機構 (ISO) で ISO/IEC 10646 の一部 (UCS-2) と
して標準化された文字コード体系。すべての文字を 16 ビット (2 バイト) で表現
し、1 つの文字コード体系で多国語処理を可能にしようとするもの。世界の主要
な言語のほとんどの文字を収録している。2 バイト表記では最大 65536 文字し
か収録できないため、中国語・日本語・韓国語で同じ意味や同じルーツの漢字は
すべて同じ文字とみなし、同じコードを割り当てる統合作業 (Han Unification
と呼ばれる) が行われ、文化の違いを無視したものだとの反発を招いている。
Unicode は、最初の規格が策定された後にハングル文字の追加や異体字表現方式
E.7 情報用語一覧
295
の策定が行われ、部分的に 3 バイト以上を使用する体系に変化している。
UCS Universal multi-octet coded Character Set の略。ISO/IEC 10646-1 として
定められた国際文字集合。世界の主要な言語で使われる文字のほとんどを収録す
る。31 ビット (4 バイト) の UCS-4 と、その部分集合である 16 ビット (2 バイ
ト) の UCS-2 がある。UCS-4 は実際に使われたことはなく、UCS-2 は Unicode
とほぼ同じものである。コンピュータ上で扱う際の符号化方式としては UTF が
使われる。
UTF UCS Transformation Format の略。UCS-2(Unicode) で定義される文字集合
を用いて記述された文字列をコンピュータが扱いやすいようにバイト列 (数値の
列) に変換する方式。1文字を 1∼6 バイトの可変長の数値 (バイト列) に変換す
る UTF-8 と、UCS-2 の集合の中に UCS-4 の一部の文字を埋め込んで UCS-2
を拡張するための UTF-16 がある。
• ハードウエア
USB Universal Serial Bus の略。周辺機器とパソコンを結ぶデータ伝送路の規格の
ひとつ。キーボードやマウス、モデム、ジョイスティック、ハードディスク、プ
リンターなど広範囲に利用される。当初、低速 (最高で 12Mbps=1.5MB/s) の
USB 1.1 という規格名で投入された。しかし、IEEE 1394 の立ち上げが遅れ、
その間に USB 1.1 の普及が爆発的に進んだ結果、CD-R や HDD などが接続さ
れるようになり、速度面での改善が必要とり、USB 2.0(HI-SPEED USB) が策
定された。http://www.usb.org に仕様書などがある。
UHCI Universal Host Controller Interface の略。USB 1.x のコントローラには
UHCI 方式と OHCI 方式の 2 種類があり、制御方法、ドライバ等が異なる。
UHCI は Intel 社が主導して策定された USB 規格で、Intel 社、VIA 社のチッ
プセットに搭載されている。インターフェースのシンプルさからコストがかから
ないが、コンピュータ本体にかかる負荷が大きくなる。USB 2.0 では Intel 社が
EHCI(Enhanced Host Controller Interface) と呼ばれる規格を無償で公開した。
OHCI Open Host Controller Interface の略。OHCI は Microsoft 社、National
Semiconductor 社などが中心となって策定された規格で、Intel 社と VIA 社以
外のほとんどのメーカーのチップセットに搭載されている。バスマスタ転送をサ
ポートしており、コンピュータ本体の CPU にあまり負荷をかけないという特徴
がある。
IEEE1394 次世代の高速転送規格。最大で 63 台の機器を、デイジーチェーンあるい
はツリー接続することが可能である。転送速度は 100Mbps, 200Mbps, 400Mbps
の規格がある。ホットプラグ (機器を動作中に抜き差しできる) が可能。ケーブ
ルからの電源供給の規格も採り入れられている。デジタルビデオの DV 端子な
296
付録 E
関連する情報技術について
ど、家電の領域でも採用が始まっている。もともとは Apple 社の FireWire であ
り、またソニーの i.Link も IEEE1394 の規格をベースにしている。
シリアル転送 コンピュータ本体と周辺機器の間のデータ転送方式の一つ。1 本の信
号線を使って 1 ビットずつデータを転送する方式。利点としてはパラレル転送方
式に比べて最大伝送距離が長いが、欠点として転送速度が遅いこと、またコン
ピュータ内部のデータ転送はパラレル方式なので UART などの回路を使ってパ
ラレルとシリアルの相互変換を行なう必要があることがあげられる。パソコン用
のシリアル転送方式としては、モデムなどとの接続に使われる RS-232C が広く
用いられていたが、近年は IrDA、USB、IEEE 1394 など新しい規格でシリアル
転送方式を採用するものが多い。
SDCC Small Device C Compiler の略。USB は、コンピューターとデバイスの双
方にマイクロプロセッサを搭載して通信する規格になっている。通信に用いられ
るのは、Cypress の EZ-USB など、8051 互換の CPU である。このプロセッサ
のためのクロス開発環境として、Linux では SDCC と呼ばれるコンパイラやデ
バッガーが開発されている。
E.8 実行・開発環境の入手と整備
E.8.1 Java 実行環境及び開発環境
Java 実行環境および開発環境は、多くのプラットフォームに対して無償で提供され
ている。表 E.4 に、入手先とインストールガイドの URL を示す。1.3 から 1.4 の間で、
CORBA 関連の仕様が大きく変更されているので、並列化が必要となった時点では 1.4 以
降のものを標準としたい。なお、Java で閉じた jar ファイルに関しては、1.2 以降のもの
であればどれでも動作するので、今のところバージョン 1.3 と 1.4 の違いはあまり問題と
ならない。
E.8.2 Java ライブラリ
この章では、開発に利用されるであろういくつかの Java ライブラリの入手先及び導入
方法を示す。入手先一覧は、表 E.5 に示す。
E.8 実行・開発環境の入手と整備
297
入手先、インストールガイド
Personal Computer
Windows(※)
http://java.sun.com/j2se/1.4.1/download.html
http://java.sun.com/j2se/1.4.1/ja/install-windows.html
Macintosh(§)
http://developer.apple.com/java/download.html
Linux
RedHat x86
http://java.sun.com/j2se/1.4.1/download.html
http://java.sun.com/j2se/1.4.1/ja/install-linux.html
Debian
http://www.tux.org/pub/java/debian woody main non-free
Linux alpha
http://www.compaq.com/java/download/
Other Unix platform
Solaris(¶)
http://java.sun.com/j2se/1.4.1/download.html
http://java.sun.com/j2se/1.4.1/ja/install-solaris.html
IBM AIX
http://www-106.ibm.com/developerworks/java/jdk/index.html
SGI IRIX
http://www.sgi.com/products/evaluation/
HP-UX
http://www.hp.com/products1/unix/java/
OpenVMS
http://www.compaq.com/java/download/
Tru64 Unix
http://www.compaq.com/java/download/
※:Windows 98 NT4 ME XP 2000
§:Mac OS 8 and later
¶:Solaris 7 and later
表 E.4: Java 実行環境と開発環境の入手方法
junit
junit , は、Java 用のテスティングフレームワークである。2003 年 1 月 7 日現在の最新
バージョンは 3.8.1 である。zip ファイルが入手可能である。Debian ではパッケージが用
意されている。rpm ファイルは http://www.jpackage.org から入手可能である。
ant
ant は Java 用の自動ビルドツールである。2003 年 1 月 7 日現在の最新バージョンは、
1.5.1 である。tar.gz ファイルあるいは zip ファイルが入手可能である。Debian ではパッ
298
付録 E
名称
配布元
junit
http://www.junit.org
ant
http://jakarta.apache.org/ant/
xt
http://www.blnz.com/xt/index.html
IIOSS
http://www.iioss.org/
関連する情報技術について
http://www.iioss.org/Download/list-j.html(ダウンロード)
http://www.iioss.org/Manual/iioss12.html#12.3(Windows 用説明)
http://www.iioss.org/Manual/iioss12.html(Linux 用説明)
CVS
http://www.cvshome.com
http://www.cvsgui.org(WindowsGUI 版)
http://www.linkclub.or.jp/˜tumibito/soft-an/
ssh
http://www.openssh.com/ja/
http://www.networksimplicity.com/openssh/(Windows 版)
mule-ucs
http://gd.tuwien.ac.at/opsys/linux/suse/suse.com/i386/8.0/suse/e2/
http://kawacho.don.am/win/meadow/mule-ucs/mule-ucs.html
Hipparcos
http://astro.estec.esa.nl/Hipparcos/hipparcos java.html
CCS
http://www.cmt.phys.kyushu-u.ac.jp/˜M.Sakurai/java/ccs/
JSci
http://jsci.sourceforge.net/
表 E.5: 各種ソフトウエアの入手方法一覧
ケージが用意されている。ant は、いくつかの jar ファイルと実行可能なシェルスクリプ
ト、Windows バッチファイル、パールスクリプトが付属している。ユーザー環境に合わ
せて実行可能スクリプトをインストールすれば、利用可能である。
xt
xt は、XML の仕様策定にもかかわる James Clark さんが作成した XML パーサと
XSLT プロセッサである。tar.gz を展開すると、xt-バージョン名-src というディレクト
リーの下に xt.jar, サブディレクトリー lib の下に 3 つの jar ファイルが生成される。これ
を適当な所にコピーすれば利用可能。サブディレクトリー demo の下に sh スクリプト及
び Windows 用バッチファイルがあるので、コピー先のディレクトリーなど必要な修正を
加えて、パスの通った所に置くと利用できる。
XML パーサや XSLT プロセッサは各種あるが、xt は、XML の仕様に忠実であり、仕
様の改訂があった際の追随も早いことで、定評がある。日本語コードは Unicode にしか
E.8 実行・開発環境の入手と整備
対応していない∗10 。他の日本語コードが必要な場合は、cocoon2 に付属しているパッチ
のあてられた xalan や xerces を使用する必要がある。
IIOSS
UML ツ ー ル の IIOSS は 、情 報 処 理 振 興 事 業 協 会∗11 が 公 募 し た 平 成 10 年
度「 ビ ジ ネ ス オ ブ ジェク ト 関 連 シ ス テ ム 開 発 事 業 」で 、琉 球 大 学 等 の グ ル ー
プ∗12 [具志堅隆児 et al., 2002] により開発された。
Hipparcos Java
将来的には、グラフィックツールや座標変換ツールなど、位置天文学に必要なツールを
一通り独自に実装したいと考えている。しかしながら、早急に結果を得る必要があること
から、現段階ではいくつかの既存ライブラリを使用する。
Hipparcos で開発された Java ライブラリは、Hipparcos のデータを解析、表示するた
めのライブラリである。
CCS
情報処理振興事業協会が公募した平成 13 年度「未踏ソフトウエア創造事業」∗13 で開発
された「可視化・疑似体験教材作成アイテム」CCS(Class Collection Sakurai) 、は、物
理学教育に必要な方程式の取扱や可視化のためのライブラリである。作成者の桜井雅史
氏は、当時九州大学で、物性物理学の大学院生であった。
∗10
仕様としては、これで十分である。
略称 IPA。「情報処理の促進に関する法律」に基づき、日本の情報処理の振興を図ることを目的に、1970
年 10 月に通産省 (当時) が管轄する特殊認可法人として設立された組織で、現在は経済産業省が管轄す
る。
∗12 佐野元之、岩田成康、古木良子、鈴木重徳 (株式会社オープンテクノロジーズ)、山田正樹 (有限会社メタ
ポリックス)、小野哲男 (宇和島郡)、佐藤賢司 (有限会社マルチパラダイムシステムズ)、高木明 (有限会
社エイビスシステムソリューション)、永松貴久代 (メランジ株式会社)、鈴木信寛 (有限会社インフォ・ウ
エイブ)、加藤俊嗣 (株式会社アステック・イーコマース)、具志堅 隆児、垣花一成、岸本克巳、新垣将史
(琉球大学 工学部情報工学科)
∗11
∗13
http://www.ipa.go.jp/NBP/13nendo/reports/explorat/
299
300
付録 E
関連する情報技術について
JSci
イギリスのダラムにあるダラム大学 の素粒子論センターの大学院 3 年生であった Mark
Hale 氏により設立された Java Objects for Science (JSci)
∗14
は、オープン・ソース・プ
ロジェクトであり、物理学や化学において Java が有効に利用され得る可能性をチャレン
ジした。
E.8.3 CVS と ssh
CVS はバージョン管理システムである。サーバーは既に JASMINE グループで運用し
ている。クライアントは、Windows 用コマンドライン版、ソースファイルとも一次配布
元から入手可能である。多くの Linux では、パッケージが用意されているか、始めから
入っている。また、Windows 用の GUI を完備した CVS システムも開発されている。
なお、emacs を利用する場合は、cvshome で配布されている pcl-cvs が便利である。
JASMINE の cvs サーバーは、ssh のアクセスを必須としている。ssh には商用のもの
と OpneSSH が配布しているフリーのものがある。ssh で cvs サーバーにアクセスするに
は、環境変数 CVS RSH を ssh にセットする必要がある。
E.8.4 Unicode 環境
今のところ、Unicode 対応のエディターはあまり多くなく、簡単に入手でいる方法とし
ては emacs に mule-ucs∗15 を入れることである。Suse Linux 版の rpm ファイルがあり、
RedHat 系で動作を確認している。Debian でもパッケージが配布されている。
Windows で emacs を利用するには meadow∗16 をインストールした後の Mule-UCS の
インストール方法が、表に示す川原雅好さんのページに記述されている。.emcs 中で、(re-
quire ’un-define)(require ’jisx0213) の二行を (set-language-environment ”Japanese”)
より前に書く必要がある。また、emacs 19 ベースのもの (Windows 版だと mule-for-
windows∗17 ) では pcl-cvs は動作しない。emacs20 以降あるいは Windows 版は meadow
が必須である。
∗14
正確な歴史は不明だが、1999 年 1 月 11 日に ver 0.825 がリリースされている。現在の最新バージョン
は、2002 年 12 月 20 日にリリースされた 0.89 である。
∗15 emacs 上で Unicode を使用するための emacs lisp ライブラリ。宮下尚氏が作成した。
∗16 宮 下 尚 氏 が Windows に 移 植 し た emacs。emacs 20 を ベ ー ス に し て い る 。一 次 配 布 元 は
∗17
http://www.meadowy.org/meadow/download.html
meadow の前のバージョン。同じく宮下尚氏が Windows 用に移植したもので、emacs19 ベースである。
E.8 実行・開発環境の入手と整備
301
な お 、ftp.m17.org/pub/mule/Windows/tools に は 、ci、 co、 crlf2lf、cvs-1.11-
client.c.diff、 cvs、 diff、 diff3、 gzip、 metamail、 mmencode、patch、 rcs、 rcsclean、
rcsdiff、 rcsmerge、 rlog、 scanvkey.gz、 splitmail、tar、 uudecode、 uuencode、の各
exe ファイルが収められている。外部コマンドの呼び出しなどで必要になった時には便利
なので参照されたい。
なお、ページャーやファイルの日本語コード変換には、Windows では So-net のダウン
ロードサイト等にいくつかのツールが紹介されている。Unix であれば、lv が less や vi
と同様な感覚で利用できて、便利であろう。
E.8.5 CCD カーネルと GUI
7.2.8 章で紹介した ccd-kernel と Gnome GUI 操作ツール gccd は、David Schmenk
氏の作で、作成者のホームページ http://home.earthlink.net/~dschmenk/で提供さ
れている。2003 年 1 月 7 日現在の最新バージョンは、gccd が 1.5、ccd-kernel は 1.7 で
ある。このドライバーは、バージョン 1.6 以降では Linux の 2.2 カーネル、2.4 カーネル
双方で動作するように設計されている。使用する CCD に対応したのは、バージョン 1.6
以降である。
usb を使用するカーネルドライバーであるから、利用するにはカーネルドライバーの
組み込み操作が必要である。必要なドライバーは、通常 Linux に附属していて usbcore
と、利用する環境に合わせて usb-ohci あるいは usb-uhci モジュールを組み込む必要があ
る。使用されているコンピューターの USB が ohci 仕様であるか、uhci 仕様であるかは、
/sbin/lspci -v コマンドでチェック可能である。また、コンパイルにはカーネルヘッ
ダーが必要である。一部の Linux バージョンでは、カーネルヘッダーや usb 関連のカー
ネルモジュールが無い場合があるので、カーネルソースを取得して作成する必要がある。
usb ドライバーを組み込んだ後、ccd-kernel をコンパイルして、これも組み込む。ドライ
バー名は sx usb、バージョン 1.6 では組み込みのオプションとして model=-9 が必要で
ある。あとは CCD を USB ポートに接続すれば、CCD を認識するはずである。
同時に gccd というソフトウエアがついており、これは GUI で CCD の操作や画像取
り込みが可能なソフトウエアである。ただし、これを利用するには gnome 開発環境∗18 と
gdkpixbuf の開発環境∗19 が必要で、別途インストールしておく必要がある。これを使え
ば、CCD が正しく認識されているか、また正しく画像の取り込みができるかのチェック
が可能となる。
TDI 機能に関する部分はサンプルのソフトウエアで、ccd-kernel のソースに付属して
∗18
∗19
Debian GNU Linux の場合は libgnome-dev パッケージ。
Debian GNU Linux の場合は libgdk-pixbuf-dev パッケージ。
302
付録 E
関連する情報技術について
いる。ccd-kernel 1.5 では kernel/samples 以下にあり、Makefile も附属している。なお、
svgalib の開発環境∗20 が必要である。
∗20
Debian GNU Linux では xvgalib1-dev パッケージ。
303
付録 F
距離決定の手法と観測の現状
この章の目次
F.1
F.2
F.3
位置天文学におけるバイアス . . . . . . . . . . . . . . . . . . . . 303
F.1.1 Malmquist バイアス . . . . . . . . . . . . . . .
F.1.2 単純な変数変換によるバイアス . . . . . . . . .
F.1.3 Lutz Kelker バイアス . . . . . . . . . . . . . .
Cepheid の PL 関係と µLMC の決定の現状 . . . . .
F.2.1 PL 関係 . . . . . . . . . . . . . . . . . . . . .
F.2.2 HIPPARCOS Cepheids . . . . . . . . . . . .
疑似データの作成方法と解析手法の改良 . . . . . . . .
F.3.1 疑似データの作成 . . . . . . . . . . . . . . . .
F.3.2 最尤法とその改良 . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
303
304
306
308
308
311
312
312
317
この章では、3.4.2 章の表記を用いる。
F.1 位置天文学におけるバイアス
F.1.1 Malmquist バイアス
Malmquist[Malmquist, 1936] は、選択効果によるバイアスの存在について議論した。
天文学のデータにはかならず magnitude limit はあるので、 magnitude limited sample
を扱う場合に出てくるこのバイアスは重要である。距離によらず等級の平均値が一定で
あっても、観測限界があるために観測されたオブジェクトだけから単純な平均値をとれ
ば、遠方のオブジェクトがより明るく見える。図 F.1 に、その典型例を示す。
304
付録 F 距離決定の手法と観測の現状
図 F.1: Malmquist bias。絶対等級は平均値が距離によらず σM = 3 の Gauß分布
で分布し、観測限界は m < M + 5 である場合を示す。下の線は観測限界、上の誤
差棒は観測されたサンプルだけの単純平均値と分散。遠方に行くほど平均値が明る
いほうにずれていることが分かる。
F.1.2 単純な変数変換によるバイアス
直接的には、視差の逆数を直接距離にして、Pogson の法則から PL 関係を求める。
Pont(1999)[Pont, 1999] は直接法の危険性を指摘しているが、これは変数変換を行なうと
ピークがずれるというバイアスである。
mV − MV = 5 log
1
− 5 + aV
π
(F.1)
し か し 、1/π か ら 距 離 を 求 め る こ と は 、σπ /π > 20% で は 極 度 に バ イ ア ス を 入 れ
るこ とに なる 。もし 視 差の 分布 がガ ウス 分布 だ とす ると 、視差 の逆 数 であ る距 離、
そ こ か ら 求 め ら れ る mag の 分 布 は 非 対 称 で 、バ イ ア ス が 入 る (Luri and Arenou
1997[Luri and Arenou, 1997])。したがって、この方法では絶対等級にも大きなバイアス
が入る。
• 最小二乗法が有効なのは、対称分布の場合である
F.1 位置天文学におけるバイアス
図 F.2: 20000 個の平均値 3.0 mas, 分散 1.0mas の π のデータを振り、これから
π > 0 のものだけを選択して距離 (pc) と絶対等級の分布を示した。絶対等級の計算
には、実視等級 5 等、av = 0 を仮定した。π の平均値から期待されるそれぞれの値
を破線の縦棒で、データから計算される平均と分散 (1σ) を実線の十字でそれぞれ示
した。この分布は、本文中に示す数学的に得られる分布に良く一致する。
• 視差がマイナスになる場合もあるので、σπ /π にカットを入れることになる。この選
択規則が、さらにバイアスを導入する。
モンテカルロ法からは、HIPPARCOS のデータからこの方法で求めたゼロ点は、0.2
mag のバイアスが入ることが予想される。(Pont(1999)[Pont, 1999])
実際にはピークのずれる方向とデータの平均値がずれる方向は、単純に重みを等しいと
して解析すると逆になる。というのは、ピークがずれる方向とは反対に大きく値がずれた
305
306
付録 F 距離決定の手法と観測の現状
データが少数あって、それが平均値に影響を及ぼすからである。図 F.2 は、20000 個の平
均値 3.0 mas, 分散 1.0mas の π のデータを振り、これから π > 0 のものだけを選択して
距離 (pc) と絶対等級の分布を表したものである。絶対等級の計算には、実視等級 5 等、
av = 0 を仮定した。π の平均値から期待されるそれぞれの値を破線で、重みはすべての
データに関して同じと仮定してデータから計算される平均と分散 (1σ) を十字で示した。
このことは、ガウス分布の解析的取扱からも理解できる。今、視差は平均値 π0 、分散
σπ の正規分布をすると仮定している。
f (π) = G (π, π0 , σπ )
(F.2)
上の図 F.2 の例に従えば、距離 r の分布 g(r) と等級 M の分布 h(M ) は
r = c1 /π (c1 = 1)
c1 c1
g(r) = 2 G
, π 0 , σπ
r
r
(F.3)
(F.4)
5
, c3 = −5)
M = c2 log π + c2 (c2 =
ln 10
2
M −c3
− π0
exp
c2
1
M − c3
exp
−
h(M ) = √
c2
2σπ2
2Πσπ c2
(F.5)
(F.6)
となるはずで、これは Monte Carlo 計算と良く一致している。ここで注意すべきは、距
離の平均値は数学的には r = 1/ c1 /π に一致するはずなのだが、π が正規分布をする
場合、1/π は数学的には不定である。π のカットオフをどこに与えるかでこの期待値
が決まるので、この期待値を議論することは意味が無い。等級については、式 (F.5) か
ら log π の期待値を計算することになるが、この値は log π にはならない。この例では
m/σ = 3.0 だから
ln π = ln π − 0.001196 ln π − 0.067276
となる。これを等級で表すと、-0.15 等級程度のバイアスがはいることになるが、そのほ
とんどは変数変換に由来する。
F.1.3 Lutz Kelker バイアス
Lutz と Kelker[Lutz and Kelker, 1973] は、視差のデータによるバイアスの存在につい
て議論した。
今、 parallax が Gauß分布をするとする。すなわち真の parallax πtrue に対して、観
測される parallax πobs は
g(πobs |πtrue ) = √
1
G (πobs , πtrue , σ)
2Πσ
(F.7)
F.1 位置天文学におけるバイアス
307
σ/πobs
0.0
0.025
0.050
0.075
0.100
0.125
0.150
0.175
∆M 0.0
-0.01
-0.02
-0.06
-0.11
-0.18
-0.28
-0.43
表 F.1: Lutz Kelker バイアスによる絶対等級の誤差を示す表。σ/πobs の値が 0.1
を越えると、∆M の値の大きくなり方は急激であることが分かる。
と分布するとする。この時、観測された parallax から真の parallax の分布を評価した
い。星の分布が球対称である、すなわち
N (r)dr = 4Πr 2 dr
であるとすると、これを parallax 空間で書けば
N (πtrue ) dπtrue =
4Π dπtrue
4
πtrue
となる。この時、式 (F.7) から逆に観測される parallax πobs が分かっている時の真の
parallax πobs の値の分布関数は
4
πobs
(πobs − πtrue )2
g(πtrue |πobs ) ∝
exp −
πtrue
2σ 2
(Z − 1)2
1
∝ 4 exp −
Z
2(σ/πobs )2
= G1 (Z)
πtrue
Z=
πobs
(F.8)
と表される。すなわち、これは σ/πobs だけをパラメーターとする Z の関数として表され
て、図 F.3 のようになる。
ただし、この積分は発散するので、確率分布としては規格化不可能である。いま、Lutz
と Kelker は、これを絶対等級の評価に関するバイアスの存在を示すために利用した。こ
の場合も積分は発散するので、パラメーター D を導入し、
∆M (D) =
5
∞
log ZG1 (Z)dZ
3
∞
G1 (Z)dZ
3
と置くと、この値が D に対して安定するのは σ/πobs < 0.175 であり、これ以下のそれぞ
れの値について絶対等級のバイアスは表 F.1 のようであると結論している。
単純に、σπ を定数として生成されたデータと、それから計算したいくつかの量の分布
を図 F.4 に示す。理想的には、距離分布と 1/π の分布は同じにならなければならないが、
誤差を導入しているために分布に大きな偏りが見られる。等級の分布は、周期が対数正規
分布をするのでこのパラメータから分散 1.75 等の正規分布になることが期待される。実
308
付録 F 距離決定の手法と観測の現状
図 F.3: Lutz Kelker bias, σ/πobs = 0.05, 0.15, 0.25 の場合について、本文中の式
(F.8) に示される関数 G1 の値を示した。
線の曲線は、この分布を示している。これに、観測誤差 1 等級を与えて、分布を見ている
ことになる。しかし、我々はマゼラン星雲までの距離を 10% の誤差で決定したいと考え
ているのだから、等級を 0.2 等の精度で求める必要があることに注意したい。
F.2 Cepheid の PL 関係と µLM C の決定の現状
F.2.1 PL 関係
HST で H0 が 10% 精度で決まったと言っているが、ここで言う 10% とは、最小が Saha
et al. [Saha et al., 1999] の H0 dLM C /50kpc = 60 ± 2km s−1 Mpc−1 、最大が Madore
et al.[Madore et al., 1999] の H0 dLM C /50kpc = 72 ± 3km s−1 Mpc−1 で ±10% という
ことである。しかし、dLM C /50kpc あるいは µLM C = 18.5 に含まれる不定性は考慮され
ていない。
Cepheid は、最も近いものでも 100pc ある。従来は、年周視差の信頼できるデータは
F.2 Cepheid の PL 関係と µLM C の決定の現状
309
図 F.4: 2000 個の sinthetic data に対する分布。σπ = 1mas, 左上は距離の分布、
右上は誤差を与えた parallaxπ の分布、左下は 1/π の分布、右下は評価された絶対
等級の分布である。それぞれ、期待される値が破線の縦棒で、データから求めた平
均と分散は実線の十字で示してある。この図には、σπ = 1.0 および σm = 1.0 を採
用した。
HIPPARCOS 以前には存在しなかった。従来は、Period-Luminosity 関係
MV = δ log P + ρ
(F.9)
のゼロ点 ρ は open cluster で Baade-Wesselink の技法を用いて決めていた。HIPPAR-
COS 以降は、表 F.2 のような結果となった (図 F.2 あるいは Pont 1999[Pont, 1999] 図
2)。この Pont 1999[Pont, 1999] では、それぞれの結果の問題点をまとめる。
通 常 は 、P-L 関 係 の 勾 配 と ゼ ロ 点 は 独 立 に 決 定 さ れ る と 考 え る 。勾 配 は 、距 離
310
付録 F 距離決定の手法と観測の現状
図 F.5: LMC の距離と、P-L 関係の ρCEP 。ここに掲げたデータは以下の文献によ
る。HIPPARCOS Cepheid に関するものが 5 つ、LPG が [Lanoix et al., 1999b],
FC が [Feast and Catchpole, 1997], OGS が [Oudmaijer et al., 1998], L が
[Luri et al., 1998] MF が [Madore and Freedman, 1998], で あ る 。HIPPARCOS RR Rylae に 関 す る も の が 4 つ で 、RR:R が [Reid, 1998], RR:G が
[Gratton et al., 1997], RR:GS が [Groenewegen and Salaris, 1999], RR:F が
[Fernley et al., 1998] で あ る 。HIPPARCOS Mira 型 変 光 星 に 関 す る も の が
Mira で 示 す [van Leeuwen et al., 1997], cluster calibration に よ る Cepheid
に に つ い て は LS で 示 す [Laney and Stobie, 1994], Barnes-Evans の surface brightness に よ る Cepheid に 関 し て GFG で 示 す [Gieren et al., 1998]
で あ る 。参 考 ま で に 、SN1987A を 用 い た も の が SN で 示 し て あって 、LS97
が [Lundqvist and Sonneborn, 1997], P97 が [Panagia et al., 1997], S97 が
[Sonneborn et al., 1997], G97 が [Gould and Uza, 1998] に対応する。
F.2 Cepheid の PL 関係と µLM C の決定の現状
ρ
FC(1997)
−1.43 ± 0.13
H0 は 10% 小さい
Szabados(1997)
連星を除くと従来と同じ
Madore(1998)
6 色測光でゼロ点を再評価
Oudmaijer(1998)
−1.29 ± 0.02
Lutz-Kelker bias を考慮
Luri(1998)
−1.05 ± 0.17
LM 法
δ = −2.81(assumed)
表 F.2: HIPPARCOS 以降の P-L 関係。FC は [Feast and Catchpole, 1997]、Szabados は [Szabados, 1997]、Madore は [Madore and Freedman, 1998]、Oudmaijer は [Oudmaijer et al., 1998]、Luri は [Luri et al., 1998] による。
が 一 定 と 考 え ら れ る 同 じ 星 団 (例 え ば LMC) で 実 視 等 級 か ら 決 定 す る 。Lanoix et
al.[Lanoix et al., 1999b] は 、信 頼 で き る 値 と し て δ = −2.77 ± 0.08 を あ げ て お り
[Caldwell and Laney, 1991]、また 遠方 の銀 河 でな く LMC を使う こと で population
incompleteness bias[Lanoix et al., 1999a] も避けられると指摘している。このドキュメ
ントでは固定する場合は δ = −2.81 を採用している。
F.2.2 HIPPARCOS Cepheids
200 個の Cepheids のうち、一つを除き πreal < σπ 、19 個が σπ /π < 50% にすぎない
(Pont(1999)[Pont, 1999])。この記述は、Lutz & Kelker(1973)[Lutz and Kelker, 1973]
によれば、parallax が観測的に信頼できる条件として σπ /πobs < 0.175 という値をあげて
おり、このデータに比べて精度の良いものが一つしかないということである。観測の個別
データでは信頼性は低いが、相対距離の精度は高いので、PL 関係のゼロ点は正確に求め
られる。沢山の低い精度のデータから信頼性の高いゼロ点を導くのが妥当。
HIPPARCOS のデータは、地上観測と比べて誤差がガウス分布であることが示され
ている [Arenou et al., 1995]。その他に、非ガウスエラーを含む場合がある。連星系な
どをなしている場合がそれである。その他にも systematic など、いくつかのエラーに
ついて文献 [Arenou et al., 1995][Arenou and Luri, 1999] で示されているが、その大き
さは小さい。主なものは、上のガウス分布のエラーと考えて良い。これに起因して考慮
しなければならないバイアスは、Lutz Kelker バイアスと Malmquist バイアスである
[Arenou and Luri, 1999]。
311
312
付録 F 距離決定の手法と観測の現状
図 F.6: HIPPARCOS Cepheids の σπ /πobs 分布。実線は σπ = πobs (上) および
σπ = 0.175πobs (下) を示しており、Lutz Kelker バイアスを考えた場合は下の実線
より更に下のデータのみが信頼できると考えられる。
F.3 疑似データの作成方法と解析手法の改良
F.3.1 疑似データの作成
次に、Cepheid の PL 関係式 (3.24)、あるいは RR Lyrae の ML 関係式 (3.25) のゼロ
点 ρ あるいは β を仮定して、モンテカルロ法により疑似データを作成し、この疑似デー
タを解析することこれらの量を計算し、仮定した値とのずれを見積もるシミュレーション
を行なった。式から、周期の対数 log P と金属量 [F e/H] は、V バンドの絶対等級 MV 0
に対して同様の線形関係を持つため、データ解析は全く同様の手法が適用できる。今後、
この変数を代表して y と書くことにする。後で多色測光にも触れるが、疑似データは y 、
MV 0 の他、B バンドの絶対等級 MB0 、それぞれの実視等級 mv 、mb 、観測された視差 π
F.3 疑似データの作成方法と解析手法の改良
Cepheid
RR Lyrae
log P (day)
[F e/H]
パラメータ
y の値
313
rmax (kpc)
8.4
y
0.8554
−1.3638
σy
0.2865
0.5880
勾配 δ or α
-2.77
0.2
ゼロ点 ρ or β
-1.33
0.72
Nstar
250
Ntry
1000
σm0
σmobs
0.21
0.12
0.005
0.02
表 F.3: 計算に使用したパラメータと、それらの典型的な値。
とその精度 σπ を属性として持つ。
以下に、疑似データの作成方法を述べる。乱数発生には、48 ビットの線形の合同乗算
法を使用した。また、典型的なパラメータの値は、表 F.3 に示す。
星の分布
これらの変光星の空間分配は一様であると仮定する。一様な分布は規格化できないの
で、我々は星の分布する距離の最大値を表す新しいパラメータ rmax を導入する。この
パラメータを用いて、星の空間分布は以下の式で与える。ここで、rmax の値は限界等
級 12.5 等の HIPPARCOS 精度では 2.1kpc、限界等級を変化させる時は、それに応じ
て rmax の値をスケールすることにする。DIVA 精度では限界等級は 15.5 等級なので、
rmax = 8.4kpc を採用する。
r2
P (r) ∝
0
0 < r < rmax
r > rmax
(F.10)
変光星の周期あるいは金属量
この値は、近似的に正規分布が良く合う (図 F.7)。
P (y) = G(y, y , σy ).
(F.11)
我々の分析では、この分布則の詳細は結果に影響を与えないだろう。そこで、我々は上の
単純なフィッティング関数を、周期あるいは金属量の分布関数として使用する。y と σy
314
付録 F 距離決定の手法と観測の現状
図 F.7: HIPPARCOS の δ Cepheid 250 個の周期 P の分布。実線は log P での平
均値 0.858 , 分散 0.255 の対数正規分布を表す曲線。
の値は、表 F.3 に与える。
V バンドの絶対等級
それぞれの変光星に対して変数 y の値が与えられたので、式 (3.24) と (3.25) に従って
絶対光度を与えることが出来る。ここで与えた絶対光度 mV 0 は、分布の中央の値である。
V バンドの絶対光度 MV は、平均値 MV 0 および分散 σm0 を持つガウス分布で分布する
と仮定する。
P (MV ) = G(MV , MV 0 , σm0 ).
F.3 疑似データの作成方法と解析手法の改良
315
B バンドの絶対等級
Cepheid の現実的なサンプルでは、多色測光により誤差を減らす手法が用いられてい
る。我々は、その方法の有効性を検証するため、B バンドの等級も併せて与えることに
する。これら 2 つのバンドでは、それぞれ異なる係数の線形関係をもつ (式 (3.29) お
よび (3.30))。Lanoix は σ(∆2 ) = 0 を仮定し、Feast は σ(∆1 ) = 0.21, α = 1.4 及び
RV = 3.3 を仮定た。我々は Laney と Stobie[Laney and Stobie, 1994] に示されたデータ
を再解析し、B, V 及び B-V の分散はとして 0.322, 0.236 および 0.0974 を採用する。式
(3.29) と式 (3.30) の独立な正規分布の分散および合成係数 α として、我々は次の値を採
用する。
σ(∆1 ) = 0.236, σ(∆2 ) = 0.0521, α = 1.35.
(F.12)
吸収係数
実視等級は、以下の式で与えられる。
mV = MV + 5 log r + 10 + AV
(F.13)
単純な傾向を得るためには、AV はゼロとしてか舞わない。現実的なシミュレーションで
は、AV の影響を評価する必要がある。Lanoix が言及したように、E(B − V )/r もまた
ランダムであるように見える。HIPPARCOS データの E(B − V ) の分布を再現するに、
以下の範囲で分布が一様であることを仮定する。
0.05 < E(B − V )/r < 0.5.
Color excess として、以下の関係式を用いる。
AV = RV E(B − V )
AB = RB E(B − V )
ここで、Lanoix に従って、RV = 3.3、RB = 4.3 とする。
実視等級
吸収係数と絶対等級が決まれば、実視等級は観測誤差を与えることで得られる。
P (mV ) = G(mV , MV + 5 log r + 10 + AV , σmobs )
(F.14)
(F.15)
316
付録 F 距離決定の手法と観測の現状
図 F.8: HIPPARCOS データでは、V と σπ の相関が見られる。(左) DIVA の場合
も、V 等級と σπ に関係がある。(右)
年周視差
年周視差は、以下のように分布すると仮定する。
P (πobs ) = G(π, 1/r, σπ ),
(F.16)
ここで、σπ はパラメーターである。現実的には年周視差 σπ の観測誤差は、見かけの光度
に依存する。我々は、DIVA 観察のケースを参考に、これらの関係が以下の式で表される
と仮定する (図 F.8)。われわれは、DIVA の web ページの図から良く一致する式を導出
した。Lanoix らのシミュレーションにおいては、やはり HIPPARCOS データにおける
V 等級と σπ の相関を考慮している。
σ0
2
3
σπ = σ0 × 100.0146(V −8) +0.00036(V −8)
6.6225σ0 100.4(V −15.5)
V <8
8 < V < 18
V > 18
(F.17)
Malmquist バイアスの取り扱い
Malmquist バイアスに関しては、Lanoix に従って以下のように取り扱う。まず 0 ≤
t ≤ 1 区間の一様乱数を生成する。t0 は以下のように定義する。
t0 =
1
.
1 + exp [γ(V − Vlim )]
(F.18)
F.3 疑似データの作成方法と解析手法の改良
317
得られた乱数 t の値が t0 より小さい場合は、星をサンプルに残す。この星は、観測され
ると考える。それ以外の場合は、我々はその星をサンプルから捨てる。我々の計算では、
γ = 1 を採用する。HIPPARCOS の場合はおよそ Vlim = 12.5 に対応し、DIVA の場合
は Vlim = 15.5 に対応する。
F.3.2 最尤法とその改良
Cepheid のパラメーター決定のために用いられている、いくつかの最尤法がある。こ
こでは、われわれは、Ratnatunga et al.[Ratnatunga and Casertano, 1991] により、も
ともとディスク矮星の周期色関係を得るために使われた方法のバイアスについて、検討
する。この方法は Tsujimoto[Tsujimoto et al., 1998] およびその他によって Cepheid の
PL 関係と RR-Lyrae の ML 関係の係数を決定することに応用された。
この方法では、パラメータの値は以下で与えられる尤度関数 L が最大値を与える値と
して得られる。
P (πok |ρ, σm )
∞
∝
d∆V p(πo |π)m(∆V , σm )ν k (D)100.6∆V
−∞
!
"
,L(ρ, σm ) =
ln P (πok |ρ, σm )
k
及び
G(πo , π, σπ )
p(πo |π) =
0
πo ∈ (π− , π+ )
otherwise
m(∆V , σm ) = G(∆V , 0, σm )
∆V = ρ + δ log P + 10 + 5 log D − mV
1
D=
π
この方法の最大の特徴は、内部的な分散および線形関係の係数が同時に決定できることで
ある。ここで、内部的分散 σm は、色補正をした場合は式 ( 3.34) で与えられる値に相当
するものである。確率関数 P (πok |ρ, σm ) は、πok で規格化される。
積分式の、ν k (D) は、星の空間分布を表す関数で、距離 D だけに依存すると仮定す
る。通常は定数と仮定される。積分の式の中に現れる 100.6∆V の巾は、式 ν k (D)D2 dD =
ν k (D)100.2×(2+1)∆V d∆V に由来し、これも空間分布に関係する。もし ν k (D) が D の単
純なべき ν k (D) ∝ D−n であれば、これは 10 のべきに繰り込むことが出来る。この場
合、100.6∆V を 100.2(3−n)∆V に修正すれば良いことになる。今、線形関係 (3.24) あるい
は (3.25) の係数が分からなくても、適当な値を用いれば相対的な距離は観測データか
318
付録 F 距離決定の手法と観測の現状
ら得ることが出来る。吸収を補正した相対的な空間分布は、図に示すように一様、即ち
ν k (D)D2 ∝ D2 ではない。
そこで、次の方法により距離分布のべきを見積り、それにしたがってここの値を修正し
することで、Ratnatunga の方法に含まれるバイアスを除去する方法を提案する。我々は
まず吸収を補正した相対的な距離を算出する。全てのデータを、この距離の昇順に並べか
えことにより、D と以下の式の N (D) の関係を得ることが出来る。
D
N (D) ≡
ν k (D)D2 dD
0
もし、分布が ν k (D) ∝ D−n に従うとすると、N (D) は以下のように計算される。
D
N (D) ∝
D2−n dD ∝ D3−n
0
即ち、log D は log N (D) にたいして、勾配 1/(3 − n) の線形関係にあることが分かる。
最小二乗法を用いて log D と log N (D) の勾配を算出すれば、n が分かる。また、データ
は星毎に作られるので、星の数が多いところに自然に重みがかけられることになる。な
お、線形関係の定数光は分布の定数倍の違いに相当する。尤度関数は規格化されるので、
定数倍の違いは尤度の結果に反映しない。
319
付録 G
登録商標等について
このレポートは、pLATEX で jsbook スタイルを用いてタイプセットしました。
AIX AIX は IBM 社の登録商標です。
Athlon XP Athlon XP は、AMD 社の登録商標です。
Borland C Borland C は Borland 社の登録商標です。
CSSP CSSP は Canon の製品名です。
GAIA GAIA は ESA のプロジェクト名です。
HIPPARCOS HIPPARCOS は ESA のプロジェクト名です。
HP-UX HP-UX は HP 社の登録商標です。
HX916 HX916 は Starlight Express 社の登録商標です。
ICX085AL ICX085AL は SONY 社の登録商標です。
IRIX IRIX は SGI-クレイ社の登録商標です。
Java Java は、Sun Microsystems 社の登録商標です。
LaTeX LATEX は、DEC 社の Leslie Lamport 氏によりマクロ強化された TEX です。
MacOS MacOS は、米国アップルコンピューター社の登録商標です。
Macintosh Macintosh は、米国アップルコンピューター社の登録商標です。
OpenVMS OpenVMS は DEC 社 (Compaq 社に吸収された) の登録商標です。
Rational ROSE Rational ROSE は Rational Software 社の登録商標です。
SIM SIM は NASA のプロジェクト名です。
TeX TEX は、Stanford 大学元教授の Donald E. Knuth 氏により開発された数式組版シ
ステムです。
Tru64 Unix Tru64 Unix は DEC 社 (Compaq 社に吸収された) の登録商標です。
Windows Windows, Windows 98, Windows XP, Windows 2000 は、Microsoft 社の登
録商標です。
320
付録 G
登録商標等について
alpha alpha は DEC 社 (Compaq 社に吸収された) の登録商標です。
jsbook jsbook は、松坂大学の奥村晴彦氏により開発されたスタイルファイルです。
platex pLATEX は、株式会社アスキーにより日本語化された LATEX です。
図 5.13 東芝機械精密機器営業部より転載許可を得た。
図 5.14 株式会社ニコンより画像提供を受けた。
図 5.15 原図の版権は山田公京都大学名誉教授 (工学部) にあり、丸文株式会社を通じて
転載許可を得た。
321
付録 H
執筆者一覧
このレポートの執筆者は以下の通りです。
郷田直輝
0, 1, 2, 3.1, 3.2.1, 3.2.2, 3.2.5, 3.2.6, 3.6, 3.7, 4.1, 4.2, 5.1,
6.1, 6.4, 7.1, 7.6, 8, 10, 11, 12, 13, A
辻本拓司
3.2.7, 4.3, B C
矢野太平
3.2.2, 5.2, 5.4, 5.6, 6.2, 6.3, 7.2, 7.5, D
小林行泰
5.3, 5.5.1
宮崎 聡
5.5.2
中島 紀
3.3.3
上田誠治
E.1
山田良透
3.4, 7.2.8, 9, E.2-E.8 F
官谷幸利
3.5.3
出田 誠
3.2.3
小林尚人
3.3.3
釜谷秀幸
3.5.5
高橋労太
3.5.4
西 亮一
3.3.1
牧野淳一郎
3.2.4
浅田秀樹
3.5.1, 3.5.2, 7.4
表 H.1: 本レポートの執筆者一覧
323
参考文献
[Alcock et al., 1998] Alcock, C., Allsman, R. A., Alves, D., Ansari, R., Aubourg,
E., Axelrod, T. S., Bareyre, P., Beaulieu, J.-P., Becker, A. C., Bennett, D. P.,
Brehin, S., Cavalier, F., Char, S., Cook, K. H., Ferlet, R., Fernandez, J., Freeman,
K. C., Griest, K., Grison, P., Gros, M., Gry, C., Guibert, J., Lachieze-Rey, M.,
Laurent, B., Lehner, M. J., Lesquoy, E., Magneville, C., Marshall, S. L., Maurice,
E., Milsztajn, A., Minniti, D., Moniez, M., Moreau, O., Moscoso, L., PalanqueDelabrouille, N., Peterson, B. A., Pratt, M. R., Prevot, L., Queinnec, F., Quinn,
P. J., Renault, C., Rich, J., Spiro, M., Stubbs, C. W., Sutherland, W., Tomaney,
A., Vandehei, T., Vidal-Madjar, A., Vigroux, L., and Zylberajch, S. (1998). EROS
and MACHO combined limits on planetary-mass dark matter in the galactic halo.
Astrophys. J., 499:L9–L12.
[Alcock et al., 2000] Alcock, C., Allsman, R. A., Alves, D. R., Axelrod, T. S., Becker,
A. C., Bennett, D. P., Cook, K. H., Dalal, N., Drake, A. J., Freeman, K. C., Geha,
M., Griest, K., Lehner, M. J., Marshall, S. L., Minniti, D., Nelson, C. A., Peterson,
B. A., Popowski, P., Pratt, M. R., Quinn, P. J., Stubbs, C. W., Sutherland, W.,
Tomaney, A. B., Vandehei, T., and Welch, D. (2000). The MACHO project: Microlensing results from 5.7 years of large magellanic cloud observations. Astrophys.
J., 542:281–307.
[Aoki et al., 2002] Aoki, W., Norris, J. E., Ryan, S. G., Beers, T. C., and Ando, H.
(2002). Chemical composition of the carbon-rich, extremely metal poor star cs
29498-043: A new class of extremely metal poor stars with xcesses of magnesium
and silicon. Astrophys. J., 576:L141–L144.
[Arenou et al., 1995] Arenou, F., Lindegren, L., Froeschlé, M., Gómez, A., Turon, C.,
Perryman, M., and Wielen, R. (1995). Zero-point and external errors of hipparcos
parallaxes. Astron. & Astrophys., 304:52–60.
[Arenou and Luri, 1999] Arenou, F. and Luri, X. (1999). Distances and absolute
324
参考文献
magnitudes from trigonometric parallaxes. In Egret, D. and Heck, A., editors,
Harmonizing Cosmic Distance Scales in a Post-HIPPARCOS Era, ASP Conference
Series, volume 167, page 13. AIP Press.
[Asada, 2002a] Asada, H. (2002a). The light cone effect on the shapiro time delay.
Astrophys. J., 574:L69–L70.
[Asada, 2002b] Asada, H. (2002b). Perturbative approach to astrometric microlensing
due to an extrasolar planet. Astrophys.J., 573:825–828.
[Belokurov and Evans, 2002] Belokurov, V. A. and Evans, N. W. (2002). Astrometric
microlensing with the GAIA satellite. Mon. Not. R. astr. Soc., 331:649–665.
[Benedict et al., 2002] Benedict, G. F., McArthur, B. E., Forveille, T., Delfosse, X.,
Nelan, E., Butler, R. P., Spiesman, W., Marcy, G., Goldman, B., Perrier, C.,
Jefferys, W. H., and Mayor, M. (2002). A mass for the extrasolar planet gliese
876b determined from hubble space telescope fine guidance sensor 3 astrometry
and high-precision radial velocities. Astrophys. J., 581:L115.
[Benoı̂t et al., 2003] Benoı̂t, A., Ade, P., Amblard, A., Ansari, R., Aubourg, Ê.,
Bargot, S., Bartlett, J. G., Bernard, J.-P., Bhatia, R. S., Blanchard, A., Bock,
J. J., Boscaleri, A., Bouchet, F. R., Bourrachot, A., Camus, P., Couchot, F.,
de Bernardis, P., Delabrouille, J., Désert, F.-X., Doré, O., Douspis, M., Dumoulin,
L., Dupac, X., Filliatre, P., Fosalba, P., Ganga, K., Gannaway, F., Gautier, B., Giard, M., Giraud-Héraud, Y., Gispert, R., Guglielmi, L., Hamilton, J.-C., Hanany,
S., Henrot-Versillé, S., Kaplan, J., Lagache, G., Lamarre, J.-M., Lange, A. E.,
Macı́as-Pérez, J. F., Madet, K., Maffei, B., Magneville, C., Marrone, D. P., Masi,
S., Mayet, F., Murphy, A., Naraghi, F., Nati, F., Patanchon, G., Perrin, G., Piat,
M., Ponthieu, N., Prunet, S., Puget, J.-L., Renault, C., Rosset, C., Santos, D.,
Starobinsky, A., Strukov, I., Sudiwala, R. V., Teyssier, R., Tristram, M., Tucker,
C., Vanel, J.-C., Vibert, D., Wakui, E., and Yvon, D. (2003). Cosmological constraints from archeops. Astron. & Astrophys., 399:L25–L30.
[Binney and Kumar, 1993] Binney, J. and Kumar, S. (1993). Angle variables for
numerically fitted orbital tori. Mon. Not. R. astr. Soc., 261(3):584–592.
[Binney and Tremaine, 1987] Binney, J. and Tremaine, S. (1987). Galactic Dynamics.
Princeton University Press.
[Brumberg and Kopeikin, 1989] Brumberg, V. A. and Kopeikin, S. M. (1989). Nuovo
Cimento B, 103:63.
[Caldwell and Laney, 1991] Caldwell, J. A. R. and Laney, C. D. (1991). Cepheids in
the Magellanic Clouds. In Haynes, R. and Milne, D., editors, Proc. IAU Symp.
325
参考文献
148, The Magellanic Clouds, page 249. Kluwer, Dordrecht.
[Christlieb et al., 2002] Christlieb, N., Bessell, M. S., Beers, T. C., Gustafsson, B.,
Korn, A., Barklem, P. S., Karlsson, T., Mizuno-Wiedner, M., and Rossi, S. (2002).
A stellar relic from the early milky way. Nature, 419:904–906.
[Clegg et al., 1998] Clegg, A. W., Fey, A. L., and Lazio, T. J. W. (1998). The gaussian
plasma lens in astrophysics: Refraction. Astrophys. J., 496:253–266.
[Cohen, 1992] Cohen, M. (1992). Powerful model for the point source sky: Farultraviolet and enhanced midinfrared performance. Astron. J., 107(2):582–593.
[Damour et al., 1991] Damour, T., Soffel, M., and Xu, C. (1991). General-relativistic
celestial mechanics. i. method and definition of reference systems. Phys. Rev.,
D43(15):3273–3307.
[Damour et al., 1992] Damour, T., Soffel, M., and Xu, C. (1992). General-relativistic
celestial mechanics. ii. translationla equation of motion. Phys. Rev., D45(4):1017–
1044.
[Damour et al., 1993] Damour, T., Soffel, M., and Xu, C. (1993). General-relativistic
celestial mechanics. iii. rotational equation of motion. Phys. Rev., D47(8):3124–
3135.
[Damour et al., 1994] Damour, T., Soffel, M., and Xu, C. (1994). General-relativistic
celestial mechanics. iv. theory of satellite motion. Phys. Rev., D49(15):618–635.
[Depagne et al., 2002] Depagne, E., Hill, V., Spite, M., Spite, F., Plez, B., Beers,
T. C., Barbuy, B., Cayrel, R., Andersen, J., Bonifacio, P., Fran?ois, P., Nordstr?m,
B., and Primas, F. (2002). First stars. ii. elemental abundances in the extremely
metal-poor star cs 22949–037. a diagnostic of early massive supernovae. Astronomy
& Astrophys, 390:187–198.
[Digel et al., 1994] Digel, S., de Geus, E., and Thaddeus, P. (1994). Molecular clouds
in the extreme outer galaxy. Astrophys. J., 422:92–101.
[Dominik and Sahu, 2000] Dominik, M. and Sahu, K. C. (2000). Astrometric microlensing of stars. Astrophys. J., 534:213–226.
[Epstein and Shapiro, 1980] Epstein, R. and Shapiro, I. I. (1980).
Post-post-
newtonian deflection of light by the sun. Phys. Rev., D22(12):2947–2949.
[ESA, 1997a] ESA (1997a). The Hipparcos and Tycho Catalogues. ESA Publication
SP-1200.
[ESA, 1997b] ESA (1997b). Hipparcos, Venice’97. ESA Publication SP-402.
[Feast and Catchpole, 1997] Feast, M. and Catchpole, R. (1997). The Cepheid periodluminosity zero-point from Hipparcos trigonometrical parallaxes. Mon. Not. R.
326
参考文献
astr. Soc., 286:L1–L5.
[Fernley et al., 1998] Fernley, J., Barnes, T., ane S. L. Hawley, I. S., Hanley, C. J.,
Evans, D., and Solano, E.and Garrido, R. (1998). The absolute magnitudes of RR
Lyraes from HIPPARCOS parallaxes and proper motions. Astron. & Astrophys.,
330:515.
[Fiedler et al., 1987] Fiedler, R., Bennison, B., Johnston, K., and Hewish, A. (1987).
Extreme scattering events caused by compact structures in the interstellar medium.
Nature, 326:675–678.
[Freedman et al., 2001] Freedman, S. L., Madore, B. F., Gibson, B. K., Ferrarese, L.,
Kelson, D. D., Sakai, S., Mould, J. R., Kennicutt, R. C. J., Ford, H. C., Graham,
J. A., Huchra, J. P., Hughes, S. M. G., Illingworth, G. D., Macri, L. M., and
Stetson, P. B. (2001). Final results from the hubble space telescope key project to
measure the hubble constant. Astrophys. J., 553:47–72.
[Fricke, 1988] Fricke, W., etal. (1988).
Fifth Fundamental Catalogue.
Veroff
Astron.Rechen-Institute, Hidelberg.
[Fricke, 1991] Fricke, W., etal. (1991). Fifth Fundamental Catalogue, PartII. Veroff
Astron.Rechen-Institute, Hidelberg.
[Fuhrmann, 1998] Fuhrmann, K. (1998). Nearby stars of the galactic disk and halo.
Astronomy & Astrophys, 338:161–183.
[Fukugita et al., 1998] Fukugita, M., Hogan, C. J., and Peebles, P. J. E. (1998). The
cosmic baryon budget. Astrophys. J., 503:518–530.
[Gamma et al., 1995] Gamma, E., Helm, R., Johnson, R., and Vlissides, J. (1995).
Design Patterns Elements of Reusable Object-Oriented Software. Addison Wesey
Longman, Inc.
[Gamma et al., 1999] Gamma, E., Helm, R., Johnson, R., and Vlissides, J. (1999).
オブジェクト指向における再利用のためのデザインパターン (改訂版). ソフトバンクパ
ブリッシング. 本位田真一、吉田和樹監訳 ISBN4-7973-1112-6.
[Gerhard and Silk, 1996] Gerhard, O. and Silk, J. (1996). Baryonic dark halos: A
cold gas component? Astrophys. J., 472:34–45.
[Gibson, 2000] Gibson, B. K. (2000). The distance to the large magellanic cloud.
Mem. Soc. Astron. Italiana, 71:693–700.
[Gieren et al., 1998] Gieren, W. P., Fouqué, P., and Goméz, M. (1998). Cepheid
period-radius and period-luminosity relations and the distance to the Large Magellanic Cloud. Astrophys. J., 496:17–30.
[Gouda et al., 2003a] Gouda, N., Tsujimoto, T., Kobayashi, Y., Nakajima, T., Mat-
参考文献
suhara, H., Yano, T., Yasuda, N., Kan-ya, Y., Yamada, Y., and Ueno, M. (2003a).
Introduction of japanese astrometry satellite mission for infrared exploration (JASMINE). In Mather, J. C., editor, IR Space Telescopes and Instruments. Proceedings
of the SPIE, volume 4850, pages 1161–1168.
[Gouda et al., 2003b] Gouda, N., Tsujimoto, T., Kobayashi, Y., Nakajima, T., Matsuhara, H., Yano, T., Yasuda, N., Kan-Ya, Y., Yamada, Y., and Ueno, M. (2003b).
Ir space astrometry:JASMINE-galactic structure surveyor project. In Ikeuchi, S.,
Hearnshaw, J., and Hanawa, T., editors, The Proceedings of the IAU 8th AsianPacific Regional Meeting, Volume II, held at National Center of Sciences, Hitotsubashi Memorial Hall, Tokyo, July 2 - 5, 2002, the Astronomical Society of Japan,
volume 289, pages 5–6. ASP.
[Gouda et al., 2002a] Gouda, N., Tsujimoto, T., Kobayashi, Y., Nakajima, T., Yasuda, N., Kan-ya, Y., Matsuhara, H., Yano, T., Yamada, Y., and Ueno, M. (2002a).
Ir space astronomy JASMINE-project. In Proc. Workshopp on Mass-Losing Pulsating Stars and Their Circumstellar Matter at Sendai, Japan Saito Ho-on kaikan
2002/5/13–16.
[Gouda et al., 2002b] Gouda, N., Tsujimoto, T., Kobayashi, Y., Nakajima, T., Yasuda, N., and Matsuhara, H. (2002b). Japanese astrometry satellite mission for
infrared exploration. Astrophysics and Space Science, 280:89–94.
[Gould and Loeb, 1992] Gould, A. and Loeb, A. (1992). Discovering planetary systems through gravitational microlenses. Astrophys. J., 396(1):104–114.
[Gould and Uza, 1998] Gould, A. and Uza, O. (1998). Upper limit to the distance to
the large magellanic cloud. Astrophys. J., 494:118–124.
[Gratton et al., 1997] Gratton, R. G., Pecci, F. F., Carretta, E., Clementini, G.,
Corsi, C. E., and Lattanzi, M. (1997). Ages of globular clusters from HIPPARCOS parallaxes of local subdwarfs. Astrophys. J., 491:749–771.
[Groenewegen and Salaris, 1999] Groenewegen, M. and Salaris, M. (1999). The absolute magnitudes of RR Lyrae stars from HIPPARCOS parallaxes. Astron. &
Astrophys., 348:L33–L36.
[Hashimoto et al., 2000] Hashimoto, Y., Funato, Y., and Makino, J. (2000). To circularize or not to circularize?-orbital evolution of satellite galaxies. Astrophys. J.,
582:196–201.
[Helmi and de Zeeuw, 2000] Helmi, A. and de Zeeuw, T. (2000). Mapping the substructure in the galactic halo with the next generation of astrometric satellites.
astro-ph/0007166.
327
328
参考文献
[Hillenbrand, 2000] Hillenbrand, L. (2000).
On the stellar population and star-
forming history of the orion nebula cluster. Astrophys. J., 533:358–371.
[Honma, 2001] Honma, M. (2001). Detecting galactic MACHOs with VERA through
astrometric microlensing of distant radio sources. Publ. Astrophys. Soc. Japan,
53:233–241.
[Huang and Carlberg, 1997] Huang, S. and Carlberg, R. G. (1997). Sinking satellites
and tilting disk galaxies. Astrophys. J., 480:503.
[Hunter and Toomre, 1969] Hunter, C. and Toomre, A. (1969). Dynamics of the
bending of the galaxy. Astrophys. J., 155:747–776.
[Israelian et al., 2003] Israelian, G., Shchukina, N., Rebolo, R., Basri, G., and Gonzalez, G. (2003). Oxygen abundances in ultra-metal-poor giants cs29498-043 and
cs22949-037
.
http://www.ociw.edu/ociw/symposia/series/symposium4/proceedings.html).
[Jeong et al., 1999] Jeong, Y., Han, C., and Park, S.-H. (1999). The effect of bright
lenses on the astrometric observations of gravitational microlensing events. Astrophys. J., 511(2):569–573.
[Jiang and Binney, 2000] Jiang, I. and Binney, J. (2000). The orbit and mass of the
sagittarius dwarf galaxy. Mon. Not. R. astron. Soc., 314:468–474.
[Kaasalainen and Binney, 1994] Kaasalainen, M. and Binney, J. (1994). Torus construction in potentials supporting different orbit families. Mon. Not. R. astr. Soc.,
268:1033–1040.
[Kamaya and Silk, 2002] Kamaya, H. and Silk, J. (2002). Observing baryonic dark
matter with ALMA. MNRAS, 335:L62–L66.
[Kobayashi and Tokunaga, 2000] Kobayashi, N. and Tokunaga, A. T. (2000). Discovery of young stellar objects at the edge of the optical disk of our galaxy. Astrophys.
J., 532:423–429.
[Koen and Laney, 1998] Koen, C. and Laney, D. (1998). On the determination of
absolute magnitude zero-points from HIPPARCOS parallaxes. Mon. Not. R. astr.
Soc., 301:582–584.
[Kopeikin, 2001] Kopeikin, S. M. (2001). Testing the relativistic effect of the propagation of gravity by very long baseline interferometry. Astrophys. J., 556(1):L1–L5.
[Kovalevsky, 2002] Kovalevsky, J. (2002). Modern Astrometry. Springer-Verlag Berlin
Heidelberg.
[Kroupa, 2001] Kroupa, P. (2001). On the variation of the initial mass function. Mon.
Not. R. Astron. Soc., 322:231–246.
329
参考文献
[Laney and Stobie, 1994] Laney, C. D. and Stobie, R. S. (1994). Cepheid periodluminosity relations in K, H, J and V. Mon. Not. R. astr. Soc., 266:441.
[Lanoix et al., 1999a] Lanoix, P., Paturel, G., and Garnier, R. (1999a). Bias in the
Cepheid period-luminosity relation. Astrophys. J., 517:188–192.
[Lanoix et al., 1999b] Lanoix, P., Paturel, G., and Garnier, R. (1999b). Direct calibration of the Cepheid period-luminosity relation. Mon. Not. R. astr. Soc., pages
969–978.
[Lasserre et al., 2000] Lasserre, T., Afonso, C., Albert, J. N., Andersen, J., Ansari,
R., Aubourg, É., Bareyre, P., Bauer, F., Beaulieu, J. P., Blanc, G., Bouquet, A.,
Char, S., Charlot, X., Couchot, F., Coutures, C., Derue, F., Ferlet, R., Glicenstein,
J. F., Goldman, B., Gould, A., Graff, D., Gros, M., Haissinski, J., Hamilton,
J. C., Hardin, D., de Kat, J., Kim, A., Lesquoy, É., Loup, C., Magneville, C.,
Mansoux, B., Marquette, J. B., Maurice, E., Milsztajn, A., Moniez, M., PalanqueDelabrouille, N., Perdereau, O., Prévot, L., Regnault, N., Rich, J., Spiro, M.,
Vidal-Madjar, A., Vigroux, L., Zylberajch, S., and collaboration, T. E. (2000). Not
enough stellar mass machos in the galactic halo. Astron. & Astrophys., 355:L39–
L42.
[Lawrence, 2001] Lawrence, A. (2001). Blank-field submm sources, failed stars and
the dark matter. MNRAS, 323:147–158.
[Lundqvist and Sonneborn, 1997] Lundqvist, P. and Sonneborn, G. (1997). In APS
Conference.
[Luri and Arenou, 1997] Luri, X. and Arenou, F. (1997). Utilisation of HIPPARCOS
data for distance determinations: Error, bias and estimation. In Proc. of the ESA
Symposium Hipparcos in Venice ’97, 13-16 May, pages 449–452. ESA SP-402.
[Luri and Babusiaux, 2001] Luri, X. and Babusiaux, C. (2001). The GAIA simulator: reference document.
Technical report, GAIA Simulator working group.
http://gaia.am.ub.es/SWG/.
[Luri et al., 1998] Luri, X., Gómez, A. E., Torra, J., Figueras, F., and Mennessier,
M. (1998). The LMC distance modulus from HIPPARCOS RR Lyrae and classical
Cepheid data. Astron. & Astrophys., 335:L81.
[Lutz and Kelker, 1973] Lutz, T. E. and Kelker, D. H. (1973). On the use of trigonometric parallaxes for the calibration of luminosity systems: theory. Publ. Astrophys.
Soc. Pacific, 85:573–578.
[Madore and Freedman, 1998] Madore, B. F. and Freedman, W. L. (1998). HIPPARCOS parallaxes and the Cepheid distance scale. Astrophys. J., 492:110.
330
参考文献
[Madore et al., 1999] Madore, B. F., Freedman, W. L., Silbermann, N., Harding, P.,
Huchra, J., Mould, J. R., Graham, J. A., Ferrarese, L., Gibson, B. K., Han, M.,
Hoessel, J. G., Hughes, S. M., Illingworth, G. D., Phelps, R., Sakai, S., and Stetson,
P. (1999). The Hubble Space Telescope key project on the extragalactic distance
scale. XV. a Cepheid distance to the Fornax cluster and its implications. Astrophys.
J., 515:29–41.
[Majewski, 1993] Majewski, S. (1993). Galactic structure surveys and the evolution
of the milky way. Annu.Rev.Astron.Astrophys., 31:575–638.
[Malmquist, 1936] Malmquist, K. G. (1936). Stockholms Ob. Medd., 26.
[Mao and Paczynski, 1991] Mao, S. and Paczynski, B. (1991). Gravitational microlensing by double stars and planetary systems. Astrophys. J., 374:L37–L40.
[Mazeh et al., 1999] Mazeh, T., Zucker, S., dalla Torre, A., and van Leeuwen, F.
(1999). Analysis of the hipparcos measurements of upsilon andromedae: A mass
estimate of its outermost known planetary companion. Astrophys. J., 522:L149–
L151.
[McGill and Binney, 1990] McGill, C. and Binney, J. (1990). Torus construction in
general gravitaional potentials. Mon. Not. R. astr. Soc., 244:634–645.
[Miralda-Escudé, 1996] Miralda-Escudé, J. (1996). Microlensing events from measurements of the deflection. Astrophys. J., 470:L113–L116.
[Miyamoto, 1995] Miyamoto, M. & Yoshii, Y. (1995). Astromety for determining the
macho mass and trajectory. Astron. J., 110:1427–1432.
[Muench et al., 2000] Muench, A., Lada, E., and C.J. (2000). Modeling the nearinfrared luminosity functions of young stellar clusters. Astrophys. J., 533:358–371.
[Murai and Fujimoto, 1980] Murai, T. and Fujimoto, M. (1980). The magellanic
stream and the galaxy with a massive halo. Publ. Astron. Soc. J., 32:581–603.
[Ojha et al., 1999] Ojha, D. K., Bienaymé, O., Mohan, V., and Robin, A. C. (1999).
New surveys of ubv photometry and absolute proper motions at intermediate latitude. Astron. & Astrophys., 351:945–953.
[Ojha et al., 1996] Ojha, D. K., Bienayme, O., Robin, A. C., Creze, M., and Mohan,
V. (1996). Structure and kinematical properties of the galaxy at intermediate
galactic latitudes. Astron. & Astrophys., 311:456–469.
[O’Meara et al., 2001] O’Meara, J. M., Tytler, D., Kirkman, D., Suzuki, N.,
Prochaska, J. X., Lubin, D., and Wolfe, A. M. (2001). The deuterium to hydrogen
abundance ratio toward a fourth QSO: HS 0105+1619. Astrophys. J., 552:718–730.
[O’Mullane and Lindegren, 1999] O’Mullane, W. and Lindegren, L. (1999).
An
参考文献
object-oriented framework for GAIA data processing. Baltic Astronomy, 8:57–72.
[Oudmaijer et al., 1998] Oudmaijer, R., Groenewegen, M., and Schrijver, H. (1998).
The Lutz-Kelker bias in trigonometric parallaxes. Mon. Not. R. astr. Soc., 294:L41.
[Paczyński, 1986] Paczyński, B. (1986). Gravitational microlensing by the galactic
halo. Astrophys. J., 304:1–5.
[Paczyński, 1995] Paczyński, B. (1995). The masses of nearby dwarfs can be determined with gravitational microlensing. Acta Astron., 45:345–348.
[Paczyński, 1996] Paczyński, B. (1996). Gravitational microlensing in the local group.
Ann. Rev. Astron. Astrophys., 34:419–460.
[Paczyński, 1998] Paczyński, B. (1998). Gravitational microlensing with the space
interferometry mission. Astrophys. J., 494:L23–L26.
[Panagia et al., 1997] Panagia, N., Gilmozzi, R., Kirshner, R. P., Pun, C. S. J., Sonneborn, G., and Collaboration, S. (1997). Improved distance determination to sn
1987a and the lmc. AAS Conference.
[Perryman, 2000] Perryman, M. (2000). Extra-solar planets. Rep.Prog.Phys., 63:1209.
[Perryman et al., 1996] Perryman, M. A. C., Lindegren, L., Arenou, F., Bastian, U.,
Bernstein, H.-H., van Leeuwen, F., Schrijver, H., Bernacca, P. L., Evans, D. W.,
Falin, J. L., Froeschle, M., Grenon, M., Hering, R., Hoeg, E., Kovalevsky, J.,
Mignard, F., Murray, C. A., Penston, M. J., Petersen, C. S., Le Poole, R. S.,
S?derhjelm, S., and Turon, C. (1996). Hipparcos distances and mass limits for
the planetary candidates: 47 ursae majoris, 70 virginis, and 51 pegasi. Astron. &
Astrophys., 310:L21.
[Pont, 1999] Pont, F. (1999). The Cepheid distance scale after Hipparcos. In Egret,
D. and Heck, A., editors, Harmonizing cosmic distance scale in a post-Hipparcos
era, ASP conference series, volume 167, pages 113–128. AIP Press.
[Quinn et al., 1993] Quinn, P. J., Hernquist, L., and Fullagar, D. P. (1993). Heating
of galactic disks by mergers. Astrophys. J., 403(1):74–93.
[Ratnatunga and Casertano, 1991] Ratnatunga, K. U. and Casertano, S. (1991). Absolute magnitude calibration using trigonometric parallax: incomplete, spectroscopic samples. Astron. J., 101(3):101–115.
[Reid, 1998] Reid, L. N. (1998). HIPPARCOS subdwarf parallaxes: metal-rich clusters and the thick disk. Astrophys. J., 115:204–228.
[Robin et al., 1996] Robin, A. C., Haywood, M., Creze, M., Ojha, D. K., and Bienayme, O. (1996). The thick disc of the galaxy: sequel of a merging event. Astron.
& Astrophys., 305:125.
331
332
参考文献
[Safizadeh et al., 1999] Safizadeh, N., Dalal, N., and Griest, K. (1999). Astrometric microlensing as a method of discovering and characterizing extrasolar planets.
Astrophys. J., 522(1):512–517.
[Saha et al., 1999] Saha, A., Sandage, A., Tammann, G., Labhardt, L., Macchetto,
F. D., and Panagia, N. (1999). Cepheid calibration of the peak brightness of type
Ia supernovae. IX. SN 1989B in NGC3627. Astrophys. J., 522:802–838.
[Santos et al., 2000] Santos, C. A., Yun, J. a. L., Clemens, D. P., and Agostinho, R. J.
(2000). Two distant embedded clusters in the outer galaxy. Astrophys. J. Lett.,
540:L87–L90.
[Scalo, 1998] Scalo, J. (1998). The imf revisited: A case for variations. In G., G. and
D., H., editors, The Stellar Initial Mass Function, ASP Conf. Ser., volume 142,
page 201. Astron. Soc. San Francisco.
[Schwarzschild, 1979] Schwarzschild, M. (1979). A numerical model for a triaxial
stellar system in dynamical equilibrium. Astrophys. J., 232:236–247.
[Shigeyama and Tsujimoto, 1998] Shigeyama, T. and Tsujimoto, T. (1998). Fossil
imprints of the first-generation supernova ejecta in extremely metal-deficient stars.
Astrophys. J., 507:L135–L139.
[Shigeyama et al., 2003] Shigeyama, T., Tsujimoto, T., and Yoshii, Y. (2003). Excavation of the first stars. Astrophys. J., 586:L57–L60.
[Smartt and Rolleston, 1997] Smartt, S. J. and Rolleston, W. R. J. (1997). The galactic oxygen abundance gradient. Astrophys. J. Lett., 481:L47–L50.
[Snell et al., 2002] Snell, R. L., Carpenter, J. M., and Heyer, M. H. (2002). Molecular
clouds and infrared stellar clusters in the far outer galaxy. Astrophys. J., 578:229–
244.
[Sonneborn et al., 1997] Sonneborn, G., Fransson, C., Lundqvist, P., Cassatella, A.,
Gilmozzi, R., Kirshner, R. P., Panagia, N., and Wamsteker, W. (1997). The evolution of ultraviolet emission lines from circumstellar material surrounding SN 1987A.
Astrophys. J., 477:848–864.
[Sozzetti et al., 2002] Sozzetti, A., Casertano, S., Brown, R. A., and Lattanzi, M. G.
(2002). Narrow-angle astrometry with the Space Interferometry Mission: The
search for extra-solar planets. I. detection and characterization of single planets.
astro-ph/0207222.
[Sparke and Casertano, 1988] Sparke, L. and Casertano, S. (1988). A model for persistent galactic warps. Mon. Not. R. astron. Soc., 234:873–898.
[Spergel et al., 2003] Spergel, D. N., Verde, L., Peiris, H. V., Komatsu, E., Nolta,
333
参考文献
M. R., Bennett, C. L., Halpern, M., Hinshaw, G., Jarosik, N., Kogut, A., Limon, M.,
Meyer, S. S., Page, L., Tucker, G. S., Weiland, J. L., Wollack, E., and Wright, E. L.
(2003). First year wilkinson microwave anisotropy probe (WMAP) observations:
Determination of cosmological parameters. astro-ph/0302209.
[Stil and Irwin, 2001] Stil, J. M. and Irwin, J. A. (2001). Gsh 138-01-94: An old
supernova remnant in the far outer galaxy. Astrophys. J., 563:816–827.
[Szabados, 1997] Szabados, L. (1997). HIPPARCOS parallaxes of the nearest cepheids
– implicative of binarity. In Proceedings of the ESA Symposium Hipparcos in Venice
’97, 13-16 May, pages 657–660. ESA SP-402.
[Takahashi, 2003] Takahashi, R. (2003). The Astorophysical Journal, in press:***.
[the GAIA Science Advisory Group, 2000] the GAIA Science Advisory Group (2000).
GAIA: Composition, formation and evolution of the galaxy, concept and technology
study report. Technical report, ESA-SCI.
[Tsuchiya, 2002] Tsuchiya, T. (2002). Contribution of the large magellanic cloud to
the galactic warp. New Astron., 7:293–315.
[Tsuchiya et al., 1996] Tsuchiya, T., Gouda, N., and Konishi, T. (1996). Relaxation
processes in one-dimensional self-gravitating many-body systems.
Phys.Rev.E,
53:2210–2216.
[Tsuchiya et al., 1997] Tsuchiya, T., Gouda, N., and Konishi, T. (1997). Chaotic
itinerancy and thermalization in a one-dimensional self-gravitating system. Ap.&
SS, 257:319–341.
[Tsuchiya et al., 1994] Tsuchiya, T., Konishi, T., and Gouda, N. (1994). Quasiequilibria in one-dimensional self-gravitating many-body systems.
Phys.Rev.E,
50(4):2607–2615.
[Tsujimoto et al., 1998] Tsujimoto, T., Miyamoto, M., and Yoshii, Y. (1998). The absolute magnitude of rr lyrae stars derived from the hipparcos catalogue. Astrophys.
J., 492:L79–L82.
[Urban et al., 1998] Urban, S. E., Corbin, T. E., and Wycoff, G. L. (1998). The ACT
reference catalog. Astron. J., 115:2161–2166.
[van der Linden, 1996] van der Linden, P. (1996).
Just JAVA.
Sunsoft Press.
ISBN013565839X.
[van der Linden, 1997] van der Linden, P. (1997). ジャストジャバ. 株式会社 ASCII.
中田秀基訳、ISBN4-7561-0799-0.
[van der Linden, 2000] van der Linden, P. (2000). ジャスト JAVA2–オブジェクト指向
プログラミングと JAVA–. 株式会社 ASCII. 中田秀基訳、4th edition, ISBN4-7561-
334
参考文献
3598-6.
[van der Linden, 2001] van der Linden, P. (2001). Just JAVA 2. Sunsoft Press.
ISBN0130320722, 5th edition.
[van Leeuwen et al., 1997] van Leeuwen, F., Feast, M. W., Whitelock, P., and Yudin,
B. (1997). First results from HIPPARCOS trigonometrical parallaxes fo Mira-type
variables. Mon. Not. R. astr. Soc., 287:955–960.
[Velázquez and White, 1999] Velázquez, H. and White, S. D. M. (1999). Sinking
satellites and the heating of galaxy discs. Mon. Not. R. astr. Soc., 304:254–270.
[Wainscoat et al., 1992] Wainscoat, R. J., Cohen, M., Volk, K., Walker, H. J., and
Schwartz, D. E. (1992). A model of the 8-25 micron point source infrared sky.
Astrophys. J. Suppl., 83(1):111–146.
[Walker, 1992] Walker, A. R. (1992). The absolute magnitudes of lmc rr lyrae variables and the ages of galactic globular clusters. Astrophys. J., pages L81–L84.
[Walker et al., 1996] Walker, I. R., Mihos, J. C., and Hernquist, L. (1996). Quantifying the fragility of galactic disks in minor mergers. Astrophys. J., 460:121.
[Walker and Wardle, 1999] Walker, M. and Wardle, M. (1999). The cloudy universe.
Publ. Astron. Soc. Australia, 16:262–272.
[Walker, 1995] Walker, M. A. (1995). Microlensed image motions. Astrophys. J.,
453:37–39.
[Walter and Sovers, 2000] Walter, H. and Sovers, O. (2000). Astrometry of Fundamental Catalogues. Springer-Verlag Berlin Heidelberg.
[Weinberg, 1998] Weinberg, M. (1998). Dynamics of an interacting luminous disc,
dark halo and satellite companion. Mon. Not. R. Astron. Soc., 299:499–514.
[Will, 1993] Will, C. M. (1993). Theory and Experiment in Gravitational Physics.
Cambridge: Cambridge Univ. Press.
[Wouterloot et al., 1990] Wouterloot, J. G. A., Brand, J., Burton, W. B., and Kwee,
K. K. (1990). Iras sources beyond the solar circle. ii - distribution in the galactic
warp. Astron. & Astrophys., 230(1):21–36.
[Yamada et al., 2003] Yamada, Y., Gouda, N., and Tsujimoto, T. (2003). Statistical
calibrations of trigonometric parallaxes. in preparation.
[宮本昌典, 1997] 宮本昌典 (1997). 位置天文学. 東京大学講義ノート.
[郷田直輝, 2000] 郷田直輝 (2000). 自己重力多体系の物理. 数理科学 2000 年 3 月号.
[具志堅隆児 et al., 2002] 具志堅隆児, 垣花一成, and 倉骨彰 (2002). 実践的 UML 入
門–IIOSS で始める新世紀プログラミング. 株式会社 ASCII. 山田正樹, 鈴木重徳監修.
[丹羽敏雄, 1981] 丹羽敏雄 (1981). 力学系. 紀伊國屋書店.
参考文献
[中野藤生・服部眞澄, 1994] 中野藤生・服部眞澄 (1994). エルゴード性とは何か. パリ
ティ物理学コース, 丸善.
[茂原正道, 1995] 茂原正道 (1995). 宇宙システム概論. 培風館.
335
337
索引
記号/数字
元素・化合物・素材
Berylium . . . . . . . . . . . . . . 112
bolo silicate . . . . . . . . . . . . 112
C-C . . . . . . . . . . . . . . . . . . . 113
C/SiC . . . . . . . . . . . . . . . . . 113
CdZnTe . . . . . . . . . . . . . . . 120
Fe . . . . . . . . . . . . . . . . . . . . . . 51
fused silica . . . . . . . . . . . . . 112
HgCdTe . . . . . . . 94, 118, 119
InSb . . . . . . . . . . . . . . . . . . . 119
LiH . . . . . . . . . . . . . . . . . . . . . 87
Mg . . . . . . . . . . . . . . . . . . 51, 52
PtSi . . . . . . . . . . . . . . . . . . . 119
Si . . . . . . . . . . . . . . . . . . . . . . . 52
SiC . . . . . . . . . . . . . . . . . . . . 113
zero dure . . . . . . . . . . . . . . 112
カーボランダム . . . . . . . . . . 114
焼結型 SiC . . . . . . . . . . . . . 113
反応焼結型 SiC . . . . . . . . . 113
人名
Booch, Grady . . . . . . . . . . 264
Clark, James . . . . . . . . . . 298
Dahl, Ole-Johan . . . . . . . 290
David Schmenk . . . . . . . . 301
Hale, Mark . . . . . . . . . . . . 300
Hipparchus . . . . . . . . . . . . . 17
Jacobson, Ivar . . . . . . . . . 264
Key, Alan. . . . . . . . . . . . . . 290
Lupton, Robert . . . . . . . . 174
Monger, Patricia . . . . . . . 174
Moor, Gordon . . . . . . . . . 251
Nygaard, Kristen . . . . . . 290
Rumbaugh, James . . . . . 264
Schmenk, David . . . . . . . 154
Whysong, David . . . . . . . 154
桜井雅史 . . . . . . . . . . . . . . . .299
宮下尚 . . . . . . . . . . . . . 179, 300
2MASS . . . . . . . . . . . . . . . 118, 237
A
abstraction . . . . . . . . . 参照 抽象化
Activity Diagram . 参照 アクティ
ビティー図
aggregate . . . . . . . . . . . . . 参照 集約
AGN . . . . . . . . . . . . . . . . . . . . . . . 18
ALMA . . . . . . . . . . . . . . . . . . . . . . 87
AOP . . . . . . . . . . . . . . . . . . 255, 290
Aspect-Oriented Programming
参照 AOP
Astro-F . . . . . . . . . . . . . . . . . . . . 113
astrometric eye . . . . . . . . . . . . . 17
astrometry . . . . . 参照 位置天文学
AWT . . . . . . . . . . . . . . . . . . . . . . 174
B
Baade-Wesselink の技法 . . . . 309
bottom-up . . . . . . . . . . . . . . . . . . 33
brown dwarf . . . . . . 参照 褐色矮星
bulge . . . . . . . . . . . . . . . . . . . . . . 236
C
C++ . . . . . . . . . . . . . 174, 255, 290
CASE . . . . . . . . . . . . . . . . . . . . . 264
CASE ツール . . . . . . . . . . . . . . . 264
CCD . . . . . . . . . . . . . . . . . . . 92, 207
class . . . . . . . . . . . . . . . . 参照 クラス
Class Diagram . . . . 参照 クラス図
CMB . . . . . . . . . 参照 宇宙背景放射
COBE DIRBE . . . . . . . . . . . . . 235
Collaboration Diagram . 参照 コ
ラボレーション図
COM . . . . . . . . . . . . . . . . . . . . . . 293
Common Object Request
Broker Architecture . 参
照 CORBA
Component Diagram . 参照 コン
ポーネント図
Component Object Model . 参照
COM
composite . . . . . . . . . . . . 参照 複合
Computer Aided Software
Engineering 参照 CASE
Concurrent Versioning System
参照 CVS
confusion limit . . . . . . . . . . . . . . 95
CORBA 175, 190, 201, 292, 296
Cross . . . . . . . . . . . . . . . . . . . . . . 255
CS22949-037 . . . . . . . . . . . . . . . . 52
CS29498-043 . . . . . . . . . . . . . . . . 52
CSSP . . . . . . . . . . . . . . . . . . . . . . 114
CubeSat . . . . . . . . 参照 超小型衛星
CVS . . . . 177, 179, 288, 293, 300
D
Delphy . . . . . . . . . . . . . . . . . . . . 255
design pattern . . 参照 デザインパ
ターン
Deutschen Zentrum für Luftund Raumfahrt . 参照 ド
イツ宇宙機関
DIRBE/IRAS dust map . . . 237
DIVA . . . . . . . . . . . 21, 25, 42, 313
DLR . . . . . . . 参照 ドイツ宇宙機関
drift scan モード参照 TDI モード
DRO . . . . . . . . . . . . . . . . . . . 60, 120
E
effective temperature . 参照 有効
温度
ELID 研削法 . . . . . . . . . . . . . . . 114
encapslation . . . . 参照 カプセル化
Erez-Rosen metric . . . . . . . . . 162
ESA . . . . 参照 ヨーロッパ宇宙機関
exponential disk . . . . . . 参照 銀河
eXtensible Markup Language 参
照 XML
eXtensible Stylesheet Language
参照 XSL
eXtreme Programming 参照 XP
F
FAME . . . . . . . . . . . . . . . 21, 27, 42
Feast と Catchpole の方法 . . . . 65
figure rotation . . . . . . . . . . . . . . 32
FITS . . . . . . . . . . . . . . . . . . . . . . 187
FK5 Extension カタログ . . . . . 17
FK5 星表 . . . . . . . . . . . . . . . . . . . . 17
Flexible Image Transport
System . . . . . . 参照 FITS
FO . . . . . . . . . . . . . . . . . . . . . . . . 289
Formatting Object . . . . 参照 FO
338
索引
G
M
GAIA . . 21, 24, 42, 50, 77, 138,
172
garbage collection . . . . . 参照 GC
GC . . . . . . . . . . . . . . . . . . . . . . . . 291
GCIB . . . . . . . . . . . . . . . . . . . . . . 115
Gliese 229B . . . . . . . . . . . . . . . . . 62
MACHO . . . . . . . . . . . . . . . . 71, 77
Malmquist バイアス . . . .303, 316
message . . . . . . . . 参照 メッセージ
Metalicity-Luminocity 関係 . 64,
312
metallicity . . . . . . . . . . 参照 金属量
method . . . . . . . . . . . 参照 メソッド
Mini-JASMINE . . . . . . . . . . . . 207
molecular ring . . . . . . . . 235, 236
Moore の法則 . . . . . . . . . . . . . . . 251
H
HI . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Hipparcos Java . . . . . . . . . . . . 299
HIPPARCOS 衛星 . . . 13, 18, 63
HR 図 . . . . . . . . . . . . . . . . . . . . . . . 70
HST . . . . . . . . . . . . . . . . . . . 69, 308
Hubble 定数 . . . . . . . . . . . . . . . . . 69
HX916 . . . . . . . . . . . . . . . . . . . . . 153
I
IBF . . . . . . . . . . . . . . . . . . . . . . . 116
ICRS . . . . . . . . . . . . . . . . . . . 18, 90
IEEE1394 . . . . . . . . . . . . . . . . . 295
IIOP . . . . . . . . . . . . . . . . . . 190, 292
IMF . . . . . . . . . . 参照 初期質量関数
Implementation Diagram . . 参照
配置図
inheritance . . . . . . . . . . . 参照 継承
Intel . . . . . . . . . . . . . . . . . . . . . . . 176
Internet Inter-ORB Protocol 参
照 IIOP
J
Japan Torus Construction
Project . . . . . . . . . . . . . 50
JASMINE . . . . . . . . . . . 14, 22, 27
JASMINE シミュレーター . . . 172
Java. . . . . . . . .174, 179, 291, 296
Java DataBase Connectivity . 参
照 JDBC
Java Native Interface . 参照 JNI
Java Remote Method
Invocation . . . 参照 Java
RMI
Java RMI . . . . . . . . 175, 288, 292
Java2 . . . . . . . . . . . . . . . . . 178, 291
JDBC . . . . . . . . . . . . . . . . 200, 292
JNI . . . . . . . . . . . . . . 175, 288, 292
JTPF . . . . . . . . . . . . . . . . . . . . . . . 89
K
N
NASA. . . . . . . . . . . . . . . . . . .21, 25
NGST . . . . . . . . . . . . . . . . . . . . . 112
non-LTE . . . . . . . . . . . . . . . . . . . . 52
N 体計算 . . . . . . . . . . . . . . . . . . . . 42
O
object . . . . . . . . 参照 オブジェクト
Object Diagram 参照 オブジェク
ト図
Object Management Group参照
OMG
Object Request Broker . . . . 参照
ORB
OHCI . . . . . . . . . . . . . . . . . 295, 301
OMG . . . . . . . . . . . . . . . . . 191, 292
Open cluster . . . . . 参照 散開星団
Open Host Controller Interface
参照 OHCI
ORB . . . . . . . . . . . . . . . . . .288, 292
Origin 計画 . . . . . . . . . . . . . . . . . . 21
outer arm . . . . . . . . . . . . 参照 銀河
overload . . . . . . . . . . . . . . . . . . . 253
override. . . . . . . . . . . . . . . . . . . .253
O 型星 . . . . . . . . . . . . . . . . . . . . . . 70
P
Period-Luminocity 関係 . 64, 308
Perseus arm . . . . . . . . . . 参照 銀河
photometry . . . . . . . . . . . 参照 測光
pico-Satellite . . . 参照 超小型衛星
Pogson の法則 . . . . . . . . . . . . . . 304
polymorphism . . . . . . 参照 多相性
post-thindisk . . . 参照 bottom-up
pre-thindisk . . . . . 参照 top-down
PSF . . . . 102, 144, 146, 170, 239
K-band . . . . . . . . . . . . . . . . . 14, 92
Korsh . . . . . . . . . . . . . . 参照 望遠鏡
Q
L
QED Technology MRF . . . . 116
QSO . . . . . . . . . . . . . . . . . . . . 18, 85
QSO0954+658 . . . . . . . . . . 85
吸収線系 . . . . . . . . . . . . . . . . . 59
L dwarf . . . . . . . . . . . . . . . . . . . . . 61
L/T transition object . . . . . . . 61
L2 . . . . . . . . . . . . . . . . . . . 14, 24, 95
LMC . . . . . . . . . . . . . . . . . . . . . . . 71
Lutz-Kelker バイアス 57, 64, 306
R
RF Plasma CVM . . . . . . . . . . 114
Ritchey-Chretien . . . 参照 望遠鏡
ruby . . . . . . . . . . . . . . . . . . 174, 255
S
SDCC . . . . . . . . . . . . . . . . 154, 296
SDSS . . . . . . . . . . . . . . . . . . . . . . 118
SED . . . . . . . . . . . . . . . . . . . . . . . . 62
self-consistent . . . . . . . . . . . . . . . 45
Sequence Diagram 参照 シーケン
ス図
SIM . . . . . . . . . . . . 21, 25, 77, 172
Simula . . . . . . . . . . . . . . . . . . . . . 290
Small Device C Compiler . . 参照
SDCC
Smalltalk . . . . . . . . 174, 255, 290
SNAP . . . . . . . . . . . . . . . . . . . . . . 93
Space Interferometry Mission 参
照 SIM
spectroscopy . . . . . . . . . . 参照 分光
SPICA . . . . . . . . . . . . . . . . . . . . 113
spiral arm . . . . . . . . . . . . 参照 銀河
SQL . . . . . . . . . . . . . . . . . . . . . . . 200
ssh. . . . . . . . . . . . . . . . . . . .179, 300
Starlight Express . . . . . . . . . . 153
subversion . . . . . . . . . . . . 177, 293
SWING. . . . . . . . . . . . . . . . . . . .174
T
T dwarf . . . . . . . . . . . . . . . . . . . . . 61
TDI モード 28, 92, 94, 118, 120,
145
top-down . . . . . . . . . . . . . . . . . . . 33
TPF . . . . . . . . . . . . . . . . . . . . . . . . 89
U
UCMs . . . . . 参照 Unified Cloudy
Models
UCS . . . . . . . . . . . . . . . . . . . . . . . 295
UCS Transformation Format 参
照 UTF
UHCI . . . . . . . . . . . . . . . . . 295, 301
UML . . . 173–175, 249, 255, 290,
299
Unicode . . . . . 178, 179, 294, 300
Unidentified SCUBA Object . 参
照 USO
Unified Cloudy Models . . . . . . 62
Unified Modelling Language . 参
照 UML
Universal Host Controller
Interface . . . . 参照 UHCI
Universal multi-octet coded
Character Set 参照 UCS
Universal Serial Bus . 参照 USB
USB . . . . . . . . . . . . . . . . . . 154, 295
Use Case Diagram . . 参照 ユース
ケース図
339
索引
USO . . . . . . . . . . . . . . . . . . . . . . . . 87
UTF . . . . . . . . . . . . . . . . . . . . . . . 295
V
VERA . . . . . . . . . . . . . . . . . . . . . . 50
VERA 計画 . . . . . . . . . . . . . . . . . 77
VLBI . . . . . . . . . . . . . . . . . . . . . . . 18
W
warp . . . . . . . . . . . . . . . . . . . . . . . . 38
Web-based Distributed
Authoring and
Versioning 参照 webdav
webdav . . . . . . . . . . . . . . . . . . . . 293
WMAP . . . . . . . . . . . . . . . . . . . . . 85
X
XMI . . . . . . . . . . . . . . . . . . 176, 294
XML . . . . . . . . . . . . . 178, 288, 294
XML Metadata Interchange . 参
照 XMI
XML Stylesheet Language
Transform . . 参照 XSLT
XML パーサ . . . . . . 178, 294, 298
XP . . . . . . . . . . . . . . . . . . . 178, 289
XSL . . . . . . . . . . . . . . . . . . 289, 294
XSLT. . . . . . . . . . . . . . . . . . . . . . 294
XSLT プロセッサ . . . . . . 178, 298
Z
z-band . . . . . . . . . . . . . . . . . . 14, 92
Zeeko Presessions Process . . 116
あ
アインシュタイン・リング . . . . . 71
アインシュタイン半径 . . . . . . . . . 77
アインシュタイン理論 . . . . . . . . . 72
アクター . . . . . . . . . . . . . . . . . . . 258
アクティビティー図 . . . . . . . . . . 261
アストロメトリ . . 参照 位置天文学
アスペクト指向 . . . . . . . 参照 AOP
天の川銀河 . . . . . . . . . . . . . . . . . . . 13
アメリカ海軍天文台 . . . . . . . . . . . 27
アレイ検出器 . . . . . . . . . . . . . . . . . 94
位相空間 . . . . . . . . . . . . . . . . . . . . . 42
位相分布関数 . . . . . . . . . . . . . . . . . 46
位置 . . . . . . . . . . . . . . . . . . . . . . . . . 30
位置決定精度 . . . . . . . . . . . . . . . . . 91
1 次元圧縮 . . . . . . . . . . . . . . . . . . 163
一次補正 . . . . . . . . . . . . . . . . . . . 149
位置天文学 . . . . . . . . . . . 13, 15, 17
位置マイクロレンズ . . . . . . . . . . . 77
一般相対性理論 . . . . . . . . . . 30, 161
色収差 . . . . . . . . . . . . . . . . 参照 収差
インジウムボンディング . . . . . . 120
インパクトパラメータ . . . . . . . . . 43
隠蔽 . . . . . . . . . . . . . . . . . . . 252, 253
渦巻き銀河 . . . . . . . . . . . . 参照 銀河
宇宙時計 . . . . . . . . . . . . . . . . . . . . . 52
宇宙年齢 . . . . . . . . . . . . . . . . . . . . . 70
宇宙背景放射 . . . . . . . . . . . . . . . . . 76
上書き . . . . . . . . . . . . 参照 override
エルゴード性 . . . . . . . . . . . . . . . . . 50
円盤銀河 . . . . . . . . . . . . . . . . . . . . . 38
オブジェクト . . . . . . . . . . . 251, 252
オブジェクト指向 . 173, 246, 251,
289
オブジェクト図 . . . . . . . . . . . . . . 260
か
解析方法 . . . . . . . . . . . . . . . . . . . 169
回転則 . . . . . . . . . . . . . . . . . . . . . 243
化学組成 . . . . . . . . . . . . . . . . . . . . . 51
ガス . . . . . . . . . . . . . . . . . . . . . 13, 16
褐色矮星 . . . . . . . . . . . . . . . . . 61, 77
カプセル化 . . . . . . . . . . . . . . . . . .253
干渉計 . . . . . . . . . . . . . . . . . . . 21, 25
完全空乏型 CCD . . . . . . . . . . . . 121
ガンマ線 . . . . . . . . . . . . . . . . . . . . . 17
基準星 . . . . . . . . . . . . . . . . . . . . . 163
軌道進化 . . . . . . . . . . . . . . . . . . . . . 44
基本座標系 . . . . . . . . . . . . . . . . . . . 18
球状星団 . . . . . . . . . . . . . . . . . . . . . 70
球面収差 . . . . . . . . . . . . . . 参照 収差
鏡面精度 . . . . . . . . . . . . . . . . . . . 111
極限散乱現象 . . . . . . . . . . . . . . . . . 85
巨大分子雲 . . . . . . . . . . . . . . . . . . . 58
距離指標 . . 13, 16, 20, 25, 30, 70
銀河 . . . . . . . . . . . . . . . . . . . . . . . . . 13
構造 . . . . . . . . . . . . . . . . . . . . . 13
Cohen モデル . . . . . . 235, 237
exponential disk . . . . . . . 235
halo . . . . . . . . . . . . . . . . . . . 236
outer arm . . . . . . . . . . . . . . . 59
Perseus arm . . . . . . . . . . . . 59
渦巻き銀河 . . . . . . . . . . . 30, 32
円盤 . . . . . . . . . . . . . . . . . . . . . 38
回転 . . . . . . . . . . . . . . . . . . . . . 34
渦状腕 . . . . . 34, 58, 235, 236
形成 . . . . . . . . . . . . . . . . . . . . . 51
形成史 . . . . . . . . . . . 13, 15, 27
進化 . . . . . . . . . . . . . . . . . . . . . 13
進化 . . . . . . . . . . . . . . . . . . . . . 51
楕円銀河 . . . . . . . . . . . . . 30, 32
ダスト . . . . . . . . . . . . . . 13, 237
中心 . . . . . . . . . . . . . . . . . . . . . 71
ディスク . . . . . . . . 13, 27, 235
thick disk . . 30, 31, 33, 52
thin disk . . . 30, 31, 33, 52
thin disk 最外縁 . . . . . . . 58
バー . . . . . . . . . . . . . . . . . 31, 47
バルジ . . . 13, 27, 30–32, 235
ハロー30, 31, 38, 42, 86, 235
力学構造 . . . . . . . . . . . . . 15, 70
矮小銀河 . . . . . . . . . . . . . . . . . 59
近赤外線 . . . . . . . . . . . . . . . . . 14, 94
金属量欠乏星 . . . . . . . . . . . . . . . . . 51
金属量 . . . . . . . . . . . . . . . . . . . . . . . 52
近傍宇宙論 . . . . . . . . . . . . . . . . . . . 13
クラス . . . . . . . . . . . . . . . . . . . . . 252
クラス図 . . . . . . . . . . . . . . . . . . . 258
系外惑星 . . . . . . . . . . 13, 16, 72, 89
系外惑星探査 . . . . . . . . . . . . . . . . . 30
継承 . . . . . . . . . . . . . . . . . . . 253, 271
ケラレ . . . . . . . . . . . . . . . . . . . . . . . 93
検出器 . . . . . . . . . . . . . 17, 144, 169
元素合成 . . . . . . . . . . . . . . . . . 51, 76
研磨 . . . . . . . . . . . . . . . . . . . . . . . 112
光学系 . . . . . . . 102, 134, 144, 169
光源の軌道 . . . . . . . . . . . . . . . . . . . 77
光行差 . . . . . . . . . . . . . . . . . . . . . 170
恒星 . . . . . . . . . . . . . . . . . . . . 参照 星
恒星物理学 . . . . . . . . . . . . . . . 13, 30
構体系 . . . . . . . . . . . . . . . . . . . . . 125
小型衛星 . . . . . . . . . . . . . . . . . . . 207
国際天文基準座標系 . . . 参照 ICRS
国立天文台 . . . . . . . . . . . . . . . . . . . 22
コマ収差 . . . . . . . . . . . . . . 参照 収差
固有運動 . . . . . . . . . . . . . . . . . 17, 30
コラボレーション図 . . . . . . . . . . 262
孤立積分 . . . . . . . . . . . . . . . . . . . . . 48
混合性 . . . . . . . . . . . . . . . . . . . . . . . 50
コンパクト天体 . . . . . . . . . . . . . . . 87
コンピューター . . . . . . . . . . . . . . . 17
コンポーネント図 . . . . . . . . . . . . 263
さ
最小二乗法 . . . . . . . . . . . . . . . . . .304
最尤法 . . . . . . . . . . . . . . . . . . 64, 317
サテライト銀河 . . . . . . . . . . . . . . . 42
散開星団 . . . . . . . . . . . . . . . . . 46, 70
三軸不等 . . . . . . . . . . . . . . . . . . . . . 32
三次補正 . . . . . . . . . . . . . . . . . . . 151
シーケンス図 . . . . . . . . . . . . . . . .262
識別性 . . . . . . . . . . . . . . . . . . . . . 252
子午環 . . . . . . . . . . . . . . . . . . . . . . . 17
自己重力 . . . . . . . . . . . . . . . . . . . . . 42
自己重力多体系 . . . . . . . 16, 30, 51
四重極コード . . . . . . . . . . . . . . . . . 42
四重極モーメント . . . . . . . . . . . . 162
システム境界 . . . . . . . . . . . . . . . .258
姿勢 . . . . . . . . . . . . . . . . . . . . . . . 169
姿勢・軌道制御系 . . . . . . . . . . . . 126
質量放出 . . . . . . . . . . . . . . . . . . . . . 54
1/4 乗則 . . . . . . . . . . . . . . . . . . . 236
視野混合鏡 . . . . 参照 ビーム混合鏡
遮蔽板 . . . . . . . . . . . . . . . . . . . . . 134
周期色関係 . . . . . . . . . . . . . . . . . .317
収差
色収差 . . . . . . . . . . . . . . 93, 102
球面収差 . . . . . . . . . . . . 93, 102
コマ収差 . . . . . . . . . . . . 93, 102
像面湾曲 . . . . . . . . . . . . 93, 102
非点収差 . . . . . . . . . . . . . . . . . 93
340
索引
重心法 . . . . . . . . . . . . . . . . . . . . . 146
集約 . . . . . . . . . . . . . . . . . . . . . . . 260
重力多体系 . . . . . . . . . . . . . . . . . . . 13
重力理論 . . . . . . . . . . . . . . . . . . . . . 72
重力レンズ . . 30, 71, 73, 161, 170
主鏡 . . . . . . . . . . . . . . . . . . . . . . . 111
主系列ターンオフ . . . . . . . . . . . . . 70
シュバルツシルトの方法 . . . . . . . 49
状態 . . . . . . . . . . . . . . . . . . . . . . . 252
情報処理振興事業協会
ビジネスオブジェクト関連シ
ステム開発事業 . . . . . . 299
未踏ソフトウエア創造事業 299
初期質量関数 . . . . . . . . . 15, 49, 54
シリアル転送 . . . . . . . . . . . . . . . .296
深宇宙探査 . . . . . . . . . . . . . . . . . . . 16
新星 . . . . . . . . . . . . . . . . . . . . . 15, 70
振動 . . . . . . . . . . . . . . . . . . . . . . . 129
スカラー・テンソル理論 . . . . . . . 72
ステートチャート . . . . . . . . . . . . 260
スパイク構造 . . . . . . . . . . . . . . . . . 85
スパイラルアーム . . . . . . 参照 銀河
すばる望遠鏡 . . . . . . . . . . . . . . . . . 16
スペース干渉計 . . . . . . . . . . . . . . . 21
星像中心 . . . . . . . . . . . . . . . . 93, 145
星像分布 . . . . . . . . . . . . . . . . . . . . . 93
生命体 . . . . . . . . . . . . . . . . . . . . . . . 89
赤外線 . . . . . . . . . . . . . . . . . . . . . . . 27
前主系列 . . . . . . . . . . . . . . . . . . . . . 57
全天サーベイ . . . . . . . . . . . . . . . .138
像面湾曲 . . . . . . . . . . . . . . 参照 収差
速度情報 . . . . . . . . . . . . . . . . . . . . . 51
束縛系 . . . . . . . . . . . . . . . . . . . . . . . 16
測光 . . . . . . . . . . . . . . . . . . . . . . . . . 17
ソフトウエア
ant . . . . . . . . . . . . . . . 179, 297
ccd-kernel . . . . . . . . . 154, 301
CCS(Class Collection
Sakurai) . . . . . . 175, 299
Eclipse . . . . . . . . . . . . . . . . 176
gccd . . . . . . . . . . . . . . . . . . . 301
IIOSS . . . . . . . . . . . . . 176, 299
JSci(Java Objects for
Science) . . . . . . . 175, 300
junit 参照 テスティングフレー
ムワーク
MagicDraw/UML . 176, 265
meadow . . . . . . . . . . . . . . . 300
mule for windows . . . . . . 300
mule-ucs . . . . . . . . . . . . . . . 300
Rational ROSE . . . 176, 264
SuperMongo . . . . . . . . . . . 174
Tcl/Tk . . . . . . . . . . . . . . . . 174
Together . . . . . . . . . . . . . . . 265
xt . . . . . . . . . . . . . . . . . . . . . 298
た
ダークエネルギー . . . . . . . . . . . . . 85
ダークマター . . 13, 16, 46, 76, 85
タイダルストリーム . . . . . . . . . . . 46
太陽電池パドル . . . . . . . . . . . . . . 141
楕円銀河 . . . . . . . . . . . . . . 参照 銀河
多重定義 . . . . . . . . . . 参照 overload
多重連星系 . . . . . . . . . . . . . . . . . .168
ダスト . . . . . . . . . . . . . . . . . . . . . . . 13
ダストレーン . . . . . . . . . . . . . . . . . 35
多相性 . . . . . . . . . . . . . . . . . . . . . 253
短距離力系 . . . . . . . . . . . . . . . . . . . 50
単独星 . . . . . . . . . . . . . . . . . . . . . 168
抽象化 . . . . . . . . . . . . . . . . . . . . . 252
長距離力 . . . . . . . . . . . . . . . . . 17, 50
長距離力系 . . . . . . . . . . . . . . . . . . . 30
超弦理論 . . . . . . . . . . . . . . . . . . . . . 73
超小型衛星 . . . . . . . . . . . . . . . . . .207
超新星 . . . . . . . . 15, 51, 54, 60, 70
Ia 型 . . . . . . . . . . . . . . . . . . . . 52
II 型 . . . . . . . . . . . . . . . . . . . . 52
残骸 . . . . . . . . . . . . . . . . . . . . . 60
超精密旋盤 . . . . . . . . . . . . . . . . . .114
潮汐破壊 . . . . . . . . . . . . . . . . . . . . . 45
直接法 . . . . . . . . . . . . . . . . . . . . . . . 65
通信系 . . . . . . . . . . . . . . . . . 126, 138
低温ガス雲 . . . . . . . . . . . . . . . . . . . 77
ディスク . . . . . . . . . . . . . . 参照 銀河
データ通信量 . . . . . . . . . . . . . . . .138
デザインパターン . . . . . . . 173, 273
テスティングフレームワーク
cppunit . . . . . . . . . . . . . . . . 289
httpunit . . . . . . . . . . . . . . . 289
junit . . . . . . . . . 179, 289, 297
電源系 . . . . . . . . . . . . . . . . . . . . . 126
電波 . . . . . . . . . . . . . . . . . . . . . . . . . 17
電波座標系 . . . . . . . . . . . . . . . . . . . 18
天文座標系 . . . . . . 参照 基本座標系
ドイツ宇宙機関 . . . . . . . . . . . 21, 25
統計力学 . . . . . . . . . . . . . . . . . 17, 50
トーラス構築法 . . . . . . . . . . . . . . . 48
ドリフトスキャンモード 参照 TDI
モード
な
二次推進系 . . . . . . . . . . . . . . . . . .126
二体衝突 . . . . . . . . . . . . . . . . . . . . . 43
熱構造解析 . . . . . . . . . . . . . . . . . .134
熱制御系 . . . . . . . . . . . . . . . . . . . 125
熱的進化 . . . . . . . . . . . . . . . . . . . . . 16
年周視差 . . . . . . . . . . . . . . . . . 17, 30
は
配置図 . . . . . . . . . . . . . . . . . . . . . 264
ハイブリッド式 . . . . . . . . . . 94, 118
薄化裏面照射型 CCD . . . . . . . . 120
白色矮星 . . . . . . . . . . . . . . . . . . . . . 77
バス部 . . . . . . . . . . . . . . . . . 125, 134
パターン
mediator . . . . . . . . . . . . . . . 190
Abstract Factory . . 201, 274
Action . . . . . 参照 Command
Adapter . . . . . . 188, 199, 278
Body . . . . . . . . . . 参照 Bridge
Bridge . . . . . . . 188, 199, 279
Builder . . . . . . .192, 197, 275
Chain of Responsibirity 283
Command . . . . . . . . 186, 283
Composite . . . 192, 194, 279
Cursor . . . . . . . . 参照 Iterator
Decorator . . . 187, 197, 198,
271, 281
Dependents . 参照 Observerr
Facade . . . . . . . . . . . . . . . . . 282
Factory Method . . . . . . . 274
Flyweight . . . . . . . . . . . . . . 282
Handle . . . . . . . . . 参照 Bridge
Interpreter . . . . . . . . . . . . . 283
Iterator . . . . . . . . . . . . . . . . 284
Kit . . 参照 Abstract Factory
Mediator . . . . . . . . . . . . . . 285
mediator . . . . . . . . . . . . . . . 186
Memento . . . . . . . . . . . . . . 286
Objects of States 参照 State
Observer . . . . . . . . . . . . . . . 286
Policy . . . . . . . . 参照 Strategy
Prototype . . . . . . . . . 192, 277
prototype . . . . . . . . . . . . . . 201
Proxy . . . . . . . . . . . . . . . . . .282
Publish-Subscribe . . . . . 参照
Observer
Singleton . . . . . . . . . 192, 277
State . . . . . . . . . . . . . . . . . . 286
Strategy . . . . . 192, 195, 286
Surrogate . . . . . . . 参照 Proxy
Template Method . . . . . . 283
Token . . . . . . . 参照 Memento
Transaction 参照 Command
Virtual Constructor . . . 参照
Factory Method
Visitor . . . . . . . . . . . . . . . . . 287
Wrapper 参照 Adapter, 参照
Decorator
ハッブル系列 . . . . . . . . . . . . . . . . . 31
ハッブル望遠鏡 . . . . . . . . . . . . . . . 16
パララックス効果 . . . . . . . . . . . . . 75
バルジ . . . . . . . . . . . . . . . . 参照 銀河
ハロー . . . . . . . . . . . . . . . . 参照 銀河
ハロー軌道 . . . . . . . . . . . . . . 95, 140
ビーム混合鏡 . . . . . . . . . . . . . . . .111
非点収差 . . . . . . . . . . . . . . 参照 収差
ビュー
実装ビュー . . . . . . . . . . . . . . 257
配置ビュー . . . . . . . . . . . . . . 257
プロセスビュー . . . . . . . . . . 257
ユースケースビュー . . . . . . 256
論理ビュー . . . . . . . . . . . . . . 257
表面重力 . . . . . . . . . . . . . . . . . . . . . 52
341
索引
フィールド星 . . . . . . . . . . . . . . . . . 58
複合 . . . . . . . . . . . . . . . . . . . . . . . 259
物質波 . . . . . . . . . . . . . . . . . . . . . . . 34
プラズマ . . . . . . . . . . . . . . . . . . . . . 85
プラズマレンズモデル . . . . . . . . . 85
ブラックホール . . . . . . . . . . . . . . . 77
振舞 . . . . . . . . . . . . . . . . . . . . . . . 252
分光 . . . . . . . . . . . . . . . . . . . . . . . . . 17
分散オブジェクト技術 . . . 287, 292
分子雲 . . . . . . . . . . . . . . . . . . . . . . . 58
ベーシックアングル . . . . . 133, 243
変光星 . . . . . . . . . . . . . . . . . . . . . . . 16
RR Lyrae . . . . . . . . . . . . . . . 64
セファイド . . . . 20, 25, 37, 64
望遠鏡
Korsh . . . . . . . . . . . . . . 93, 102
Ritchey-Chretien . . . . . . . . 93
星 . . . . . . . . . . . . . . . . . . . . . . . 13, 54
形成 . . . . . . 13, 15, 16, 30, 58
形成率 . . . . . . . . . . . . . . . . . . . 54
形成領域 . . . . . . . . . . . . . 30, 58
進化 . . . . . . . . . . . . . . . . . 15, 70
星生成 . . . . . . . . . . . . 参照 星 (形成)
ポスト・ニュートン近似 . . . . . . 161
ま
マイクロレンズ . . . . . . . . . . . 30, 71
マイクロレンズ効果 . . . . . . . . . . . 77
巻き込みの問題 . . . . . . . . . . . . . . . 34
マゼラン雲 . . . . . . . . . . . . . . . . . . . 38
マックスウェル分布 . . . . . . . . . . . 43
マックスウェル・ボルツマン分布50
ミッション部 . . . . . . . . . . . 125, 134
ミッシングバリオン . . . . . . . . . . . 85
密度波 . . . . . . . . . . . . . . . . . . . . . . . 34
メソッド . . . . . . . . . . . . . . . . . . . 252
メッセージ . . . . . . . . . . . . . . . . . .251
メンバー . . . . . . . . . . . . . . . . . . . 252
モノリシック . . . . . . . . . . . . 94, 118
モンテカルロシミュレーション 64,
ユースケース図 . . . . . . . . . . . . . . 257
誘導可能性 . . . . . . . . . . . . . . . . . .260
ヨーロッパ宇宙機関 . . . 18, 21, 24
4 人組 . . . . . . . . . . . . . . . . . . . . . . 273
ら
ラグランジュポイント . . . . . . . . . 14
力学構造 . . . . . . . . . . . . . . . . . 30, 46
力学的摩擦 . . . . . . . . . . . . . . . . . . . 42
リサージュ軌道 . . . . . . 24, 95, 140
裏面照射 CCD . . . . . . . . . . . . . . 121
連星 . . . . . . . . . . . . . . . . . . . . . 16, 70
連星系 . . . . . . . . . . . . . . . . . . . . . 168
6 次元位相空間 . . . . . . . . . . . . . . . 34
ロケット
H-IIA . . . . . . . . . . . . . . 14, 126
M-V . . . . . . . . . . . . . . . . . . . 126
312
や
わ
有効温度 . . . . . . . . . . . . . . . . . . . . . 52
惑星状星雲 . . . . . . . . . . . . . . . . . . . 70
© Copyright 2026 Paperzz