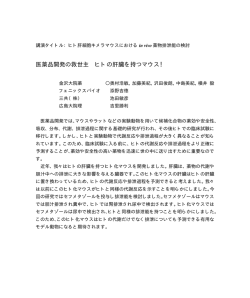
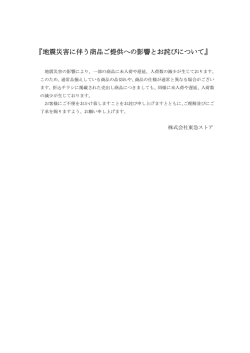
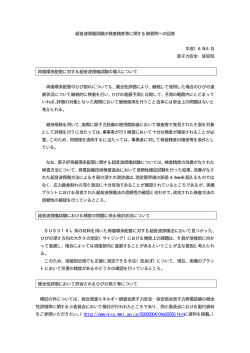
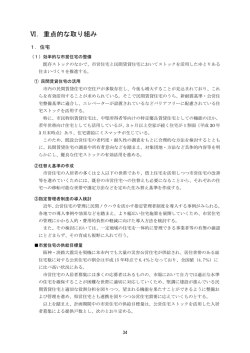
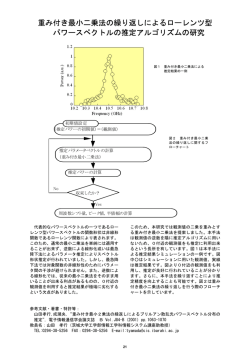
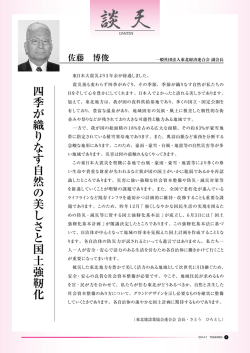
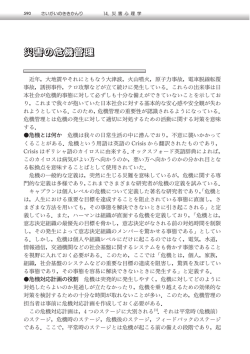
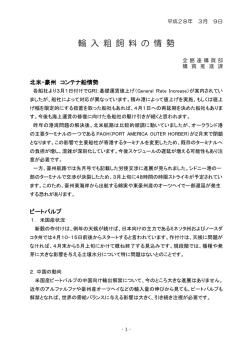
有利な体の使い方とその根拠 動作とパフォーマンス向上のための自発的姿勢制御の仮説 青木 ポール紀和 身技レッスン 東京都渋谷区恵比寿 3-5-5 Email: [email protected] 2014年7月29日 序.余計な力の抜き方 「体に余計な力が入っている」とは,よく聞く表現である。ここでいう「力」とは, 体の筋の緊張程度といえるだろう。人からこのように指摘されて,すぐに余計な筋緊張の 入っていない状態に導ける人もいる。その一方で,人からこのように指摘されても自分で は余計な筋緊張の入っていない状態に導くことができない人もいる。「体から余計な力が 抜けない」と訴える人である。 私はここで述べることは,「体に生じる余計な筋緊張とは何か,その影響とはどうい うものか,そして余計な筋緊張を除くための方法はどういうものか」に答えるものとなる。 私達が体に余計な筋緊張を加えないことが望ましいことであり,それによって私達は 姿勢,動作,呼吸,発声を効率的で負担が少ない有利なものにすることができると考えて いる。そして,こうした体の動作や機能を基にする演奏や歌唱,ダンス,スポーツ,武道, コミュニケーションといった活動のパフォーマンスを向上させることができると考えて いる。また,仕事や家事等における体の負担を軽減でき,体の故障や,痛みの改善,予防 を通じて健康状態を向上させることができると考えている。 私達が最小限の筋緊張で目的の活動を実現できる「有利な体の使い方」とその根拠を ここで述べる。これには,体の支え方である体位維持の仕方が関わり,注意の向け方,意 識の仕方も関わるものとなる。私がここで述べることは,動作時における自発的な姿勢制 御の仮説であり,私のクライアント指導を通じて検証を重ねた考えである。 本稿は,私の考えを要約して紹介するものである。根拠や実現方法の詳細な説明を含 めたものは後日書籍の形で公表する。 1. 体位維持の仕方の影響 私達は,起きている間は常に自身の体を支えている。体位を維持する活動を行ってい る。一定の割合の人がこの体位維持の仕方を不利なものにしてしまうと,私はアレクサン ダー・テクニークを基にした姿勢動作指導の活動を通じて感じている。そして,こうした 人は,不利な体位維持の仕方により,体の負担を大きくし,体の故障や慢性的な痛みなど の問題を起こしやすい。また,不利な体位維持の仕方により,体に余計な筋緊張を加えて 身技レッスン 青木ポール紀和 <[email protected]> 2 しまうなどから,こうした人は姿勢や動作,呼吸,発声を不利なものとし,様々な活動の パフォーマンスを劣化させることになると考えている。 一定の割合の人が不利な体位維持の仕方でいる理由は,私達が体位維持の仕方に注意 を向けずにいれば,自身の体位維持の仕方を不利なものとしやすいからである。多くの人 は,様々な活動をする際に,自身の体位を維持していること,または体位維持の仕方に注 意を向けないでいるだろう。そして,私達が注意を向けずに体位を維持する場合は,その 体位維持の仕方が「筋力に依存した即席の対処」になりやすく,この「筋力に依存した即 席の対処」が不利なものとなるからである。体位維持に関わる即席の対処の仕方は複数あ り,静止時と動作時でそれぞれある。これらの対処の仕方をまとめて「即席保全」とここ では呼ぶ。 2.静止時における不利な体位維持の仕方 静止時における不利な体位維持の仕方は二つある。一つは,実行者が体を支える骨で 構成される関節を屈曲や過伸展させた状態(「骨傾斜」の状態)を容認した体位維持の仕 方である。このように体位維持する実行者の態度を「骨傾斜容認」とここでは呼ぶ(図1, BとC)。 実行者が骨傾斜容認でいる場合は,骨盤を前方にスライドさせて後傾させること(骨 盤スライド後傾),脊柱の屈曲,頭を前方に突出させて頸椎を伸展させること(頭部前方 突出と頸椎伸展)を起こしていやすい。 もう一つは,実行者が,体の重心位置を支持基底面上の適切位置から乖離させること を容認する体位維持の仕方である。このように体位維持する実行者の態度を「重心乖離容 図1 姿勢の例 身技レッスン 青木ポール紀和 <[email protected]> 3 認」とここでは呼ぶ。実行者が重心乖離容認でいる場合は,重心位置を適切位置よりも後 方に乖離させていやすい。 実行者は,骨傾斜容認や重心乖離容認の態度でいれば,その状態で体を支えるために, 筋や靭帯といった引張する組織をより働かせることになる。こうした際の体位維持の仕方 は張力に依存した事後的な対応ともいえるものであり,この対処の仕方を「張力事後対応」 とここでは呼ぶ。 実行者が骨傾斜容認や重心乖離容認でいて張力事後対応をしていれば,実行者は筋や 靭帯といった組織の負担を大きくし,脊柱椎間板の故障につながる負担も大きくし,呼吸 や発声,内臓機能を制約することになる。この体位維持の仕方は不利なものといえる。 一定の割合の人がこの体位維持の仕方に陥る理由を述べる。一つは,張力事後対応は 実行者が靭帯張力を用いて筋負担を減らす体位維持の仕方であり,実行者はそれを「楽に」 感じやすいことである。もう一つは,張力事後対応は「実行者が倒れる方向を後方に特定 して一定のパターンで支える」ようにする単純化した対処であるために,実行者が体位維 持活動に注意を向けなくてもよくなることが挙げられる。骨傾斜容認や重心乖離容認でい て張力事後対応をしている実行者は,結果的には,体位維持活動の有利性よりも,楽さや 単純さを優先して,この体位維持の仕方をしていることになる。即席で体位維持をしてい るといえるだろう。このため,骨傾斜容認や重心乖離容認でいた際の張力事後対応は,即 席の処置といえる。 3.動作時における不利な体位維持の仕方 動作時における不利な体位維持の仕方は,実行者が腹筋群と首の筋群の筋緊張を過剰 なものにする体位維持の仕方である。動作時には,実行者は体位維持のために体を支える 骨を止める必要があるが,その活動を「制動」とここでは呼ぶ。実行者が腹筋群と首の筋 群の筋緊張を過剰にすることは,制動のための対処となる。主動筋と拮抗筋の双方の筋緊 張を強くすることを共縮と呼ぶが,この体位維持の仕方は,実行者が背筋群とそれに拮抗 する腹筋群と首の前側の筋群の共縮を過剰なものにして,上半身を制動する対処の仕方と なる。このため,これを「過剰共縮制動」とここでは呼ぶ(図2)。 実行者は過剰共縮制動をすることで,動作時に体を支える骨に生じる筋の牽引や関節 を通じた作用力に拮抗していくことができ,動作中の体位を維持することができる。しか し,実行者はそこまでの強い筋緊張を加えなくとも体位維持することができる可能性があ ることから,過剰共縮制動の筋緊張は過剰なものとなる。実行者の体の筋群は全体的に筋 緊張が強くなり,その動きは固くなる。また,腹筋群は呼吸に関わっており,腹筋群の筋 緊張を伴う過剰共縮制動は実行者の呼吸を制約する。過剰共縮制動は,不利な体位維持の 仕方となる。この過剰共縮制動による腹筋群と首の筋群の筋緊張が「余計な力」の主要素 であり,正体となると考えている。 一定の割合の人が動作時に過剰共縮制動を行って腹筋群と首の筋群の筋緊張を過剰 なものとしてしまう理由は,こうした人が次に挙げる傾向を持つからである。それらは, 動作時に骨傾斜容認でいること1,動作速度を必要以上に速めてしまうこと,バルサルバ 1 動作時に体を支える骨が骨傾斜の状態であったり,骨傾斜状態に動いてしまう場合は,その骨に付着して支えて 身技レッスン 青木ポール紀和 <[email protected]> 4 図2 過剰共縮制動 操作を行うこと 2である。また,過剰共縮制動は,筋緊張を強めるだけの単純な対処であ ることに加え,動作時の「姿勢変化による重心変位の対処」ともなる汎用的な対処であり, 体位維持活動に注意を向けない人にとって都合のよいものとなることも,一定の割合の人 がこれを採用する理由の一つとなる。 過剰共縮制動をしている実行者は,結果的には体位維持活動の有利性よりも単純さや 汎用性を優先していることになる。こうした実行者は即席で体位維持をしているといえる だろう。このため,過剰共縮制動は,張力事後対応と同様に,即席の処置となるといえる。 実行者が過剰共縮制動をする際には,骨傾斜容認がその一因であることも多いため, 実行者は動いたり,力を発揮する一瞬前に,骨盤スライド後傾,脊柱の屈曲,頭部前方突 出と頸椎伸展を起こしやすい。 4.即席保全の問題 不利な即席保全の体位維持方法とは,実行者が骨傾斜容認や重心乖離容認でいる時の 張力事後対応のことと,過剰共縮制動のことである。ここでは「即席保全」は,これらの 対処を採用してしまう実行者の態度のことも表すものとする。実行者が即席保全の態度で いて,こうした対処をしていれば,体への負担を増やし,機能を制約し,動作や発声のパ フォーマンスを劣化させることになる。これだけで既に問題であるが,即席保全でいる問 題は,実行者がその対処の仕方を脳の自動プログラムとして定着させて習慣としてしまっ いる筋は,支えるための力のモーメントを発揮するために更に収縮を進める必要がある。その理由は,筋の両端が 近づいた状態で筋が力を発揮することになるからである。腹筋群と首の筋群は,骨傾斜容認状態(骨盤スライド後 傾,脊柱屈曲,頭部前方突出と頸椎伸展)では筋の両端が近づいて短くなる状態で働くことになり,これらは上半 身の体を支える骨を支えるために更に収縮を進めることになる。これは仮説である。 2 バルサルバ操作は,声帯を閉じて,腹筋群の筋緊張を強める操作のことである。こうすることで高められる胸腔 と腹腔の圧力を体の支えに利用してする操作となる。 身技レッスン 青木ポール紀和 <[email protected]> 5 ていること,また実行者が強い筋緊張の感覚に慣れることによって,更に根深いものとな る。 即席保全を自動プログラム化して定着させた人は,静止時の体位維持のために過剰共 縮制動を行って,静止時の体の筋緊張を過剰なものとしてしまう場合がある。制動は,動 作時における実行者の対処であるが,この反応は実行者の強い筋緊張の感覚への慣れもあ って,実行者が過剰共縮制動を本来は必要のない静止時に行ってしまうという反応である。 また,臥位時で体を支える必要がないにも関わらず,その習慣から実行者が体の強い筋緊 張を継続させてしまう場合がある。また,腕を使っていない時に,肩甲骨周りの筋群の筋 緊張を強いものとする場合がある。肩甲骨周りの筋群の筋緊張は腕を使う時の反応であり, この反応はそれを実行者が腕を使っていない時に無自覚に起こしてしまうという反応で ある。即席保全を定着させた人は,こうした不要な反応をしている場合があり,その場合 は体の強い筋緊張の状態をより長時間継続させることになり,体の負担をより大きくする ことになる。 こうしたことから,即席保全の対処を定着させた人は,肩こりや首のこり,腰痛とい った慢性的なこりや痛みを抱えやすいと考えている。また,腱鞘炎,胸郭出口症候群,椎 間板ヘルニア,坐骨神経痛などの症状にも至りやすいと考えている。動作や活動への影響 についていえば,即席保全の対処を定着させた人は,自身の持つ力を最大限に発揮しきれ ない,疲労しやすい,動きが固くなる,力発揮の反応の後れを起こしやすいなど,動作や 発声のパフォーマンスを劣化させやすい。そして,息をつめるなど,浅い呼吸の状態を継 続させることになり,あせりやすいなど,心理面の落ち着きも得にくくなる。 5.即席保全からの是正の難しさ 「脳における自動プログラム構築」と「強い筋緊張感覚に対する実行者の慣れ」によ り,即席保全でいる人の体の使い方の是正は難しいものとなる。多くの人が,この体の使 い方の是正が難しいことを十分に認識していないと考えている。良い姿勢を形成しようと して,継続的にそれを持続できる人はそれほど多くない。逆に筋緊張が強くなって疲れて しまう人も多いだろう。一定の割合の人は姿勢を放置してしまっているが,それは是正し ようとしても適切にできなかったからかもしれない。 その難しさとは,即席保全の人が最小限の筋緊張で体位維持する感覚,または最小限 の筋緊張で動作する感覚を失うこと,そしてその有利な状態に違和感を得てしまうことで ある。 重力が私達の体に働くが,即席保全でいる人は,その重力の働きに抗重力筋群で拮抗 し,腹筋群や首の筋群の筋緊張を緩和して体位を維持する感覚を失いやすい。この感覚は 「体重を支持部位に預ける感覚」とも表現できるものである。元々の強い筋緊張で体位維 持する感覚に慣れている人は,それを緩和できる感覚がないことから,体位維持状態を筋 緊張を緩和できるものに修正したとしても,その筋緊張を緩和させにくい。こうした人は 更に,強い筋緊張と共に支える感覚に安定感を得ていやすい。このため,実行者が有利な ものに是正していくにあたって筋緊張を緩和していくことになるが,筋緊張を緩和させた 感覚に不安定感という違和感を得ることになる。 身技レッスン 青木ポール紀和 <[email protected]> 6 また,即席保全でいる人は,動作時に,体幹や体幹に近い筋群の筋緊張の感覚を得よ うとしやすい。実行者としての言葉でいえば,これは「筋や関節を使って動かす」と表現 されるような動作意図となると考えている。この動作意図で実行者が動作を行えば,その 体位維持の仕方が有利なものであっても,実行者は過剰な筋緊張を誘発することになる。 即席保全でいる人の体の使い方の是正は可能である。なぜなら,私達は体位維持活動 を骨格筋を用いて行うが,骨格筋を随意で用いることができ,体位の維持を意図して変え ることができるからである。また,脳には可塑性があり,私達は脳で構築した自動プログ ラムも修正することができるからである。しかし,このことは,是正にあたって,是正す る人の認知過程の活性化が求められることを同時に意味している。つまり,是正する人は, 体の使い方に対する「意識の仕方」を変えていく必要があるということである。具体的に は,「自身の体の状態に気づくようにし,自身の体を支えていることを考え,自身に指示 を出すように有利な体の使い方を意図していく」ことである。そして,さらにいくつかの 特定の意識の仕方が求められる。これらによって,難しさを超えて是正していきやすくな ると考えている。 6.有利な体位維持の仕方 こうした体やパフォーマンスの問題に悩み,その改善を考えている人は,自身の体位 維持の仕方を有利なものに是正し,有利な体の使い方を実現すべきである。その目標とな る有利な体位維持の仕方について以下に述べる。 静止時の姿勢形成では,有利な体位維持の仕方は,実行者が体を支える骨を「立骨状 態」とし,重心を適切位置に位置づける体位維持の仕方である。「立骨状態」とは,ある 体を支える骨が,その下に隣接する体を支える骨の関節面に,最大の接触面積で荷重を伝 えている状態のことである(図3)。この状態は適度な伸展位であり,関節において屈曲 や過度な伸展が起こっていない状態ともいえる。このように体位維持する実行者の制御, または制御態度を「立骨重心制御」とここでは呼ぶ。 図3 骨と筋の架空モデルを用いた立骨状態(1)と骨傾斜状態(2)の例 身技レッスン 青木ポール紀和 <[email protected]> 7 図4 つっぱり棒(a)。壁の間に設置される(b)。 実行者が立骨重心制御を行えば,その姿勢アライメントは運動学で理想的とされる姿 勢アライメントになると考えている3。また,自身の重量による荷重と床反力,骨の反力 を体を支える骨の抑止に活かせるようになる。実行者が立骨重心制御を行うことは,体を 支える骨を「つっぱり棒」のように用いることともいえる(図4)。つっぱり棒が両端か ら受ける圧力のみで安定するように,体を支える骨は,体の重量による荷重と床反力や骨 の反力という力を上下端から受けることで安定しやすくなる。このため,実行者は,体を 支える骨を止めるために要する筋や靭帯による張力を必要最小限のものにできる。つまり, 体の筋緊張を最小限のものにして,体位維持を行えるようになる。実行者は立骨重心制御 状態でいることによって,痛みや故障の問題となりやすい筋や靭帯,関節組織の負担を減 らすことができ,呼吸や発声などの機能制約をなくすことができる。 動作時においても,実行者が立骨重心制御をしていることが,有利な体位維持の仕方 となる。立骨重心制御状態を動作中に継続させるために,実行者は,支持部位接面部全体 で支持面に荷重し,支持部位の抑止を基に体を制動していくようにする。この制動の仕方 を「重鎮基底制動」と呼ぶ。重鎮基底制動は,過剰共縮制動とは異なり,有利な制動の仕 方となる。実行者は,動作時に立骨重心制御と重鎮基底制動をすることで,目的動作と制 動のための筋群の「筋収縮力の目的仕事への転化効率」(目的仕事転化効率)を悪化させ ず,良い状態を維持することができる。つまり,最小限の筋緊張で動作を行えるようにな る。更にいえば,自身の最大限の力を発揮できるようになるともいえる。実行者は,これ らの制御を行うことで,力発揮の反応の後れも起こさず,疲れず,固くならずに動作する ことができる。実行者は,動作を「軽く」,そして「力がのる」ように感じるだろう。 7.有利な体の使い方の方針と実現するための留意点 実行者は,有利な体の使い方を実現するにあたって,即席保全に陥らないように自身 の体位維持活動に注意を向ける必要がある。そして,実行者は体位維持の仕方を含めて, 有利な体の使い方を意図していく必要がある。つまり,注意を向けずに事後的な対応をす る態度ではなく,事前に適切にマネージメントする態度を持つのである。ここでは,有利 な体の使い方を目指す実行者の態度のことを「有利意図」と呼ぶ。有利意図の人が,有利 な姿勢や動作を実現していく方針は,以下のことである。これは即席保全からの脱し方と もいえる。 3 立位の場合は,側方視で,外果の前方,膝関節中心のやや前方,大転子,肩峰,乳様突起が前額面において垂直 線上にあるとき,アライメントがよいとされている。(中村隆一他「基礎運動学」,2003) 身技レッスン 青木ポール紀和 <[email protected]> 8 ①自身の体の状態に気づき,体位維持も含めて有利な体の使い方を実現する意図を持つ ②姿勢は立骨重心制御を意図する ③重鎮基底制動で体を制動し,過剰共縮制動を採用しない ④動作時は「筋や関節を使う動作意図」を避けるため,目的動作を導く先導端となる部位 を特定し,それを動かす意図を持つ(目的端先導の意図) ⑤姿勢変化の際に脚を使って体の重心を適切に制御する また,有利意図の人が,有利な体の使い方を実現していくにあたって特に留意すべき ことは以下のことである。 ①体の支持部位を考慮し,支持部位に体重を預ける ②頭に注意を向け,頭部制御と共に動く ③骨盤を立てる ④腹筋群と首の筋群をできるだけ筋緊張させないようにする ⑤呼吸の状態を知り,息をつめず,息を吐く ⑥動く速度を過度に上げない ⑦変化に伴う違和感を受け入れる 8.有利な体位維持の仕方の実現方法 立位における立骨重心制御状態の実現にあたって,有利意図の人が自身に出す指示の 仕方は次のものとなる。「頭を上方に持ち上げ,足底上の最高位置に位置づける。顔が正 面を向くように,頭の額を適度に前方に向ける。足底全体に体重がかかるように体を導く。 その上で足底に全ての体重を預ける意識を持つ。骨盤を立てるために,脛と大腿部前側に 体重が少しかかるように殿部を後方に位置づける。全体として『体の前側に支えがある』 と考え,脛,大腿部前側,腹部,首の前側に体重が少しかかる感覚を得るように体を導く。 呼吸をしたときに腹部前面が膨らんだりへこんだりできること,頭が胴体から独立してい つでも動ける状態であることを確認する。」(図5) 実行者は頭と骨盤を制御することで,体を支える骨を立骨状態に導きやすくなる。ま た,「足底に体重を預ける」ように意図することで,重心を適切位置に位置づけることが でき,自身の重量による荷重を支持部位と体を支える骨の安定に活かせるようになる。そ して,体の前側に体重がかかるように導き, 「体の前側に支えがある」と意図することで, 本来働くべき脊柱起立筋や大腿二頭筋などの最小限の働きを促すことができる。これらの 筋群は,前方に傾く力のモーメントに反応する形で働きが促される。なお,図6に座位に おける立骨重心制御を実現する指示の仕方を示している。 動作時には,有利意図の人は動作前から動作中も立骨重心制御を行った上で,「支持 部位に体重を預け,支持部位が止まっていることを考えて,目的動作を導く先導端部位を 動かす」と意図して動作する。立位姿勢形成時と同じく,呼吸をして腹部前面が動く程度 か確認し,頭が胴体から独立していつでも動ける状態かを確認する。 動作時には,それぞれの動作において特に抑止すべき部位があり,それを固有制動先 とここでは呼ぶ。大きな力を発揮する際や速い速度の動作が求められる際には,実行者は 固有制動先を「力の伝達の中継箇所」ととらえ,そこから動きを導く先導端に力を伝える 身技レッスン 青木ポール紀和 <[email protected]> 9 意図を持つとよい。例えば,実行者が腕を使って力を発揮する際には,固有制動先は「胸 骨上端部」と「頭の額」となる(図7)。実行者の指示の仕方としては,立骨重心制御や 重鎮基底制動を実現した上で「頭を最高位置に位置づけて額を適度に前方に向け,胸骨上 図5 直立立位における立骨重心制御 図6 座位における立骨重心制御 身技レッスン 青木ポール紀和 <[email protected]> 10 端部と額から力を伝えていると考え,腕の先導端を動かす」というものになる。野球のバ ットスイングとバレエで体をターンさせる動きにおいて,実行者が意図すべきことの一部 を図8に示している。この他にも椅子から立ち上がる/椅子に座る動き,膝と股関節を曲 げて中腰になる時,歩行,ゴルフスイング,ピアノ演奏,デスクワークのタイピング動作, サッカーボールを蹴る,自転車のペダルをこぐ,上半身を動かす動作など様々な活動にお 図7 腕と脚の動きにおける固有制動先 図8 バットスイング,ターンの動作で意識すること 身技レッスン 青木ポール紀和 <[email protected]> 11 いて,有利な動作を実現するための指示の仕方を示すことができる。 ここで勧めていることは,動作時における効率的な体の止め方といえる。その止め方 は,「置物を置くように,自身の体を床に置く」ようなものとなる。この意図の仕方によ って,実行者は自身の重量を再認識しやすくなり,自身の重量による荷重と,床反力,骨 の反力を,体を止めることに活かせるようになる。多くの人は体を動かす時に,動かすこ とや目的を達成することに注意を向けて,自身の体を止めていることを考慮しないだろう。 このため,体位維持の仕方が即席な方法である即席保全となりやすい。有利意図の人は, 動作時において盲点となる「体を止めること」も同時に考えるべきである。そして,「体 を置く」と考えて,効率的な止め方を意図するとよい。これを「プレイシング(Placing)」 と呼んでいる。 9.有利な呼吸と発声の実現方法 呼吸やその呼吸機能を用いる発声,歌唱,管楽器演奏についても,実行者は立骨重心 制御と重鎮基底制動の基で行うことで,それらを有利なものにできる(図9)。有利意図 の人が,歌唱や管楽器演奏などの努力的な呼吸をしていく際は,目的端先導の意図を持つ とよい。呼吸の目的端先導の意図は「鼻や口から息を吐いたり吸ったりする」という当た り前と思われるようなものとなる。これに対し,実行者が「腹筋を使って息を吐く」「胸 で吸う」という意図を持つ場合は,呼吸筋群の筋緊張を過剰なものにしやすい。これらは 「筋を使って動かす動作意図」となるからである。呼吸時には腹部や胸部が動くが,この 動きは自動的に行われるものと実行者は考える方がよい。それよりも,頭や脊柱,骨盤の 図9 立骨重心制御の発声と管楽器演奏への応用 身技レッスン 青木ポール紀和 <[email protected]> 12 立骨状態を支えることを考える。これらは努力呼吸のための腹筋群収縮によって牽引を受 けており,動かされやすくなっているからである。 実行者は呼吸を意識的に効率的なものにできれば,負担軽減だけでなく,心理的に落 ち着きやすいなどのメリットを得られる。呼吸は体位維持活動と密接な結びつきを持って いるため,実行者の体位維持の仕方がその呼吸の質を左右すると考えている。世の中には 様々な呼吸法や呼吸の意識の仕方があるが,ここで勧める呼吸の仕方は,体位維持活動と 呼吸を結びつけていることに独自性がある。 発声における目的端先導の意図は「相手に届く声を出す」というものとなる。この意 図の方が,「声帯や喉で声を出す」「お腹に力を入れて声を出す」という意図よりもよい。 また,歌唱や演技の発声,管楽器演奏の活動は表現芸術でもあり,表現することが行為の 目的であることから,有利意図の人は,こうした活動時における目的端先導の意図として 「自分の表現したい情景や感情や想いを,聴いている人に伝える」「自分の出したい声, 音を出す」としてもよい。実行者が有利な体位維持の仕方をしていれば,体の諸機能は実 行者の想いを具現化しやすくなると考えている。音楽や演技などの表現活動を行う人は, 表現となる音楽や演技だけに注意を集中する一方で,体位維持活動を放置しやすい。しか し,体位維持の有利性はそのパフォーマンスを左右するため,表現者は体位維持の仕方に 一定の注意を向けるべきである。 10.心理的プレッシャーと情動の体位維持活動への影響とその対処 試合本番や人前での発表など心理的プレッシャーを受ける際に体が固くなり,自身の 通常のパフォーマンスが実現できなくなる人がいる。いわゆる「あがり」の反応である。 こうした人は,心理的プレッシャーを受けた際に即席保全の体位維持の仕方に陥っている と考えている。実行者は心理的プレッシャーの強い刺激の中で安心感を得ようとして, 「確 実な支え」ともいえる強い筋緊張による体の抑止方法を無自覚に採用してしまうのではな いか,という考えである。 有利意図の人は,心理的プレッシャーを受ける際に自身に気づき,特に「支持部位に 体重を預け,息を抜くように息を吐くこと,呼吸をした時に腹部前面が動くかどうか,頭 が動ける状態かどうか」を考えるとよい。実行者が日頃から立骨重心制御や重鎮基底制動 を行っていれば,自身の支え方に気づくことをきっかけにして,有利な体位維持の仕方に 修正することができ,自身の通常時の動きや力の発揮を実現できるようになる。 実行者が心理的プレッシャーを受けた際に,有利な体の使い方や呼吸の仕方を意識的 に実現できることは,心理的プレッシャーによるパフォーマンスへの悪影響を最小限にす るメンタル面の技術となる。つまり,有利な体の使い方や呼吸の仕方を意識的に実現して いくことは,競技者やパフォーマーらにとって有効なメンタルトレーニングとなる。 敵意や恐怖を感じたり,不安や心配,切迫感や悲嘆があるなど,ネガティブな情動が あった際にも,私達は即席保全の対処に陥りやすいと考えている。こうした情動の背景に はストレスが関係する場合が多いが,実行者の即席保全の対処の継続はストレスによる体 への悪影響を大きくする。ストレスによる体への悪影響を極力少なくするために,実行者 は有利な体位維持の仕方を意図して実現するとよい。実行者はこの対処によって,ストレ 身技レッスン 青木ポール紀和 <[email protected]> 13 スとなる外部環境を変えられるわけではないが,ストレスによる体の反応の仕方をより負 担の少ないものに変えられるようになる。 11.体の使い方へ向ける注意の仕方 即席保全を是正していく人は,自身の体位維持活動や動作の仕方に一定の注意を向け る必要がある。これを「自己ユース注意」とここでは呼ぶ。実行者には同時に,外界への 注意や行為の目的達成に向けた注意も必要である。これを「外界目的注意」とここでは呼 ぶ。この双方の注意を統合することが,よりよいパフォーマンスを導く実行者の注意の向 け方となると考えている。体へ注意を向けることがパフォーマンスに悪影響を与えるとす る考えもあるものの,自己ユース注意はこれにはあてはまらないと考えている。それまで 外界目的注意のみだった人からすれば,自己ユース注意を加えるということは,集中して おらず,注意が散漫となっているように感じるかもしれない。自己ユース注意は行為の成 否や有利性に関係する注意であり,有利意図の人は自己ユース注意を加えて統合した注意 の向け方を「新しい集中の仕方」と考えるべきである。 12.アレクサンダー・テクニークが有効である理由と補うべき点 アレクサンダー・テクニーク(AT)という体の使い方の方法論がある。ATは,体の 故障や痛みの改善,体または心理面の緊張の改善,パフォーマンス向上に役立つものとし て知られている。ATに一定の効果があるのは,それが推奨している体の使い方や体への 指示,その指導の特徴によって,即席保全を定着させている人がその反応を抑制して,有 利な体の使い方を実現できるようになるからである。指示でいえば,以下に挙げる意図を 促すことが有効なものとなる。頭に注意を向けること,首の筋緊張を抑制すること(「ネ ックフリー」),体の使い方への気づき,目的端先導の意図,体全体を考えて動くことであ る。また,「ハンズオン」といって指導者が手で直接クライアントを導く指導も有効なも のとなる。 既存のATが求める理想的な体の使い方の状態と,私が本論考で述べた理想的な体の 使い方の状態は同じであると考えている。つまり,どちらも実行者が最小限の筋緊張で体 位を維持し,動作をしていくことを理想状態としている,ということである。しかし,理 想的な体の使い方の考え方や,そしてそれをどのような指示に基づいて実現していくかに ついて,両者は異なる。 既存のATにおける体の使い方の考え方,それを基にした体への指示には,不足して いる点があり,補うべきことがあると考えている。それらは,以下のことである。 • 望ましい姿勢が特定されておらず,それを導く指示が漠然としていること。 (例:「頭が前に上に」「背中が長く広く」「頭が動いて体全体がついていく」) • 「感覚的評価はあてにならない」は誤解を招くこと。この理由は,客観的な基準 のある感覚的な評価は行えるからである。(例:体の前側に重さがかかる感覚) • 有利な制動の方法が示されていない。 • 骨盤の制御について共通の理解がない。 • 腹筋群の過剰な筋緊張とその抑制に触れていない。 身技レッスン 青木ポール紀和 <[email protected]> 14 • 動作や反応速度への考慮やバルサルバ操作の抑制が示されていない。 • 「ノン・ドゥーイング」は適切な表現ではない。この理由は,理想的な状態を実 現するにあたっては,マネージメントが求められるものであり, 「何もしない」を 意味するノン・ドゥーイングはその対極となり,誤解されやすいからである。 既存のAT指導では「インヒビション」「ノン・ドゥーイング」という表現がよく用い られ, 「しないようにする」 「やめる」という抑制の指示が多くなる。この抑制に重点を置 いた指示というのは,実行者にとって慎重さを要するものになりやすく,思い切りのよい 動きを行いにくくなるのではないかと考えている。また,この抑制に重点を置いた指示で は,理想状態が明確ではないこともあって,実行者が漠然とした感覚評価に依存しやすく, 理想的な状態を自身で導くにあたってより多くのレッスンを要するものとなり,「理想状 態を達成できているかどうか」の不安を伴うものとなると考えている。私がここで推奨し た方法では,望ましい状態が具体的なものとなっており,実行者がその望ましい状態を積 極的に意図していくことに重点が置かれている。これにより,実行者は思い切りのよい動 きができ,理想状態の実現に不安が少なく,自身でより短期間で良好な状態に導けるよう になると考えている。私の勧める方法は,ATの理想状態となる「ネックフリー」となる ために必要な制御を積極的に行うことに重点を置いたものといえる。 参考文献 伊藤隆 『解剖学講義』(第 3 版) 南山堂,2012 年。 Donald A. Neumann(嶋田智明他訳) 『筋骨格系のキネシオロジー』 医歯薬出版,2005 年。 Anne Shumway-Cook,Marjorie H. Woollacott (田中繁他訳) 『モーターコントロール 運動 制御の理論から臨床実践へ』(原著第 3 版,邦訳第 3 版) 医歯薬出版,2009 年。 中村隆一,齋藤宏,長崎浩 『基礎運動学』(第6版) 医歯薬出版,2003 年。 山下謙智,伊東太郎,東隆史,徳原康彦 『多関節運動学入門』 (第2版) ナップ,2012 年。 チャールズ・レオナルド(松村道一他監訳) 『ヒトの動きの神経科学』 市村出版,2002 年。 大築立志,鈴木三央,柳原大他 『姿勢の脳・神経科学 ―その基礎から臨床まで―』 市村 出版,2011 年。 嶋田智明,大峰三郎他 『運動連鎖〜リンクする体』 文光堂,2011 年。 クライン・フォーゲルバッハ(野澤絵奈訳) 『機能的運動療法』 丸善出版,2012 年。 Gabriele Wulf(福永哲夫監訳,水藤健,沼尾拓訳) 『注意と運動学習 —動きを変える意識の 使い方—』 市村出版,2010 年。 ケンダル,マクレアリー,プロバンス(栢森良二監訳) 『筋:機能とテスト ―姿勢と痛み ―』(邦訳第1版,原著第4版) 西村書店,2006 年。 A. I. Kapandji(塩田悦仁訳) 『カパンディ 関節の生理学』(原著第 6 版,邦訳第2版) 医 歯薬出版,2008 年。 身技レッスン 青木ポール紀和 <[email protected]> 15 フレデリック・フースラー,イヴォンヌ・ロッド=マーリング(須永義雄,大熊文子訳) 『う たうこと 発声器官の肉体的特質』 音楽之友社,1987 年。 Gerard J. Tortora,Bryan Derrickson(大野忠雄他訳) 『トートラ 人体の構造と機能』(原著 第 11 版,邦訳第 2 版) 丸善,2007 年。 Parry WD : Understanding & Controlling Stuttering. 2nd ed, National Stuttering Association, 2009. 宮本省三 『脳のなかの身体 認知運動療法の挑戦』 講談社,2008 年。 樋口貴広,森岡周 『身体運動学 知覚・認知からのメッセージ』 三輪書店,2008 年。 Alexander FM : Use of the self. 1985 ed, Orion books, 2001. 小田伸午 『一流選手の動きはなぜ美しいのか』 角川学芸出版,2012 年。 著者 青木ポール紀和。プレイシングメソッドコーチ。アレクサンダー・ テクニーク指導者。日本アレクサンダー・テクニーク協会(JATS) 会員。東京都出身。1973年生まれ。 University of California, Santa Barbara卒。大手自動車会社のマーケ ティング関連部署で10年間勤務。長年の頭痛がアレクサンダー・ テクニーク(AT)で改善したことをきっかけに,働きながらAT教師 資格を取得。独立し,恵比寿に教室「身技レッスン」を開設。個 人レッスンを中心に年間300人以上の人に触れて姿勢や動作を直 接指導。ATを洗練させた独自の指導理論である「プレイシングメ ソッド」を基に,プロの音楽家や俳優,ダンサー,講師のパフォーマンス向上に貢献し, 様々な人の体の痛みや故障の改善に貢献している。雑誌への掲載多数。昭和女子大学オー プンカレッジ講師,(株)LUSHジャパンのスパ施術者研修トレーナー,富川ギター教室特別 講師などを務める。 Copyright © 2014 Norikazu Aoki All Rights Reserved. 身技レッスン 青木ポール紀和 <[email protected]>
© Copyright 2026 Paperzz