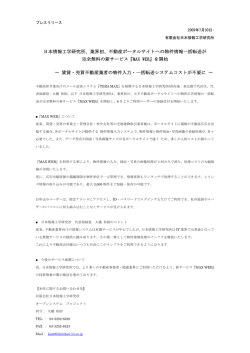
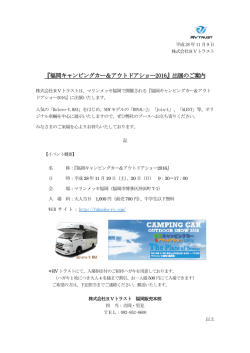
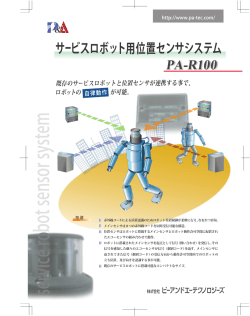
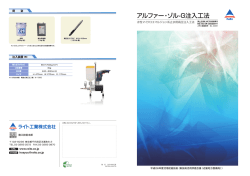
マイクロシステムデザインのための諸力学 マイクロセンサを始め様々なマイクロシステムに剛体の変形、ダイヤフラ ムの変形、共振周波数における梁の振動が利用されている。ここでは代 表的なケースについてそれらの基本的な考え方を説明する。 1. 薄板の静的曲げ 2. 機械的振動 3. 熱力学 4. 破壊力学 5. 薄膜の力学 6. 有限要素法による応力解析 薄板の静的曲げ 右図のような長方形の板の曲げ 変形を与える偏微分方程式 ∂2 ∂ 2 ∂w2 ∂w2 p 2 + 2 2 + 2 = ∂y D ∂y ∂x ∂x (1) ここで w=w(x, y) は板表面に等 分布圧力 p が作用したときの垂 直方向のたわみ。 Eh 3 D= D は板のたわみ剛性 12(1 − υ 2 ) (1)式を解いてたわみ w=w(x, y) が求め られると、それを用いて板の各所に働く 曲げモーメントや曲げ応力を計算できる だたし E: ヤング率 ν: ポアソン比 h : 板厚 薄板の静的曲げ 曲げモーメント ∂2w ∂2w M x = − D 2 + υ 2 ∂y ∂x ∂2w ∂2w M y = − D 2 + υ 2 ∂x ∂y ∂2w M xy = D(1 − υ ) ∂x∂y (2a) (2b) (2c) 曲げ応力((2)式で求めた最大曲げモーメントを用いる) (σ xx )max = (σ ) = (σ ) = yy max xy max 6(M x )max h2 6(M y )max 2 h 6(M xy )max h2 (3a) (3b) (3c) 薄板の静的曲げ(周端部を拘束した円板の曲げ) 半径 a の円板に一様な応力 p が作用 径方向の最大曲げ応力(端部) (σ rr )max = 3W 4πh 2 W = πa 2 p (4a) 接線方向の最大曲げ応力(端部) (σ θθ )max = 3υW2 (4b) 4πh 円板中心における最大曲げ応力 σ rr = σ θθ = 3υW 8πh 2 (5) 最大たわみ(円板中心) wmax 3W (m 2 − 1)a 2 =− 16πEm 2 h 3 m= 1 υ (6) 右辺のマイナス符号は下向きのたわみを表わす 薄板の静的曲げ(例題:周端部を拘束した円板の曲げ) [問題] 右図のようなシリコン製のマイクロ圧力センサに おける円形ダイヤフラムの最小板厚を求めよ。 ただしダイヤフラムの直径は600μmで周端部 は剛的にシリコンの土台に固定されてものとする。 ダイヤフラムは7000 MPa の降伏点を越えること なく 20MPa の圧力に耐えるよう設計する。 シリコンダイヤフラムのヤング率E=190000 MPa, ポアソン比ν=0.25 とする。 (σ rr )max = h= 3W 4πh 2 3W 4π (σ rr )max (σ θθ )max = 3υW2 4πh h= 3υW 4π (σ θθ )max これら h をσrr とσθθが7000 MPa の降伏点を超 えないように設計するが、ポアソン比 ν<1 であ るため左側の式を用いて計算する。 W=πa2 p=3.14×(300×10-6) 2×(20×106)=5.652 N h= 3 × 5.652 = 13.887 × 10 −6 [m] = 13.887 [µm] 6 4 × π × (7000 × 10 ) ダイヤフラムのたわみも (6) 式から計算できる。 薄板の静的曲げ(すべての外周を拘束した長方形板の曲げ) 最大曲げ応力(長手端部の中央) (σ ) yy max pb 2 =β 2 h (7) 最大たわみ(重心) wmax pb 4 = −α Eh 3 (8) (7),(8)式におけるα、βは縦横比を用いて次の表から求める [計算例] a=752µm、b=376µm 、p=20MPaとする。板厚を前問の答え h=13.887µm、材料も前問と同じとして強度を計算せよ。 (σ ) yy max pb 2 (20 × 106 )(376 × 10 −6 ) 2 = β 2 = 0.4974 = 7292.8 × 106 [Pa ] = 7282.8 [MPa ] −6 2 h (13.887 × 10 ) 降伏応力7000MPaを超えるため危険 → 板厚 h を増やす 薄板の静的曲げ(すべての外周を拘束した正方形板の曲げ) 正方形状のダイヤフラムはシリコン基板から切り出 しやすいのでセンサなどに頻繁に利用される 最大曲げ応力(端辺の中央) σ max 0.308 pa 2 = h2 (9) 最大たわみ(重心) wmax 0.0138 pa 4 =− Eh 3 (10) [計算例] a=532µm 、p=20MPaとする。板厚を前問の答え h=13.887µmとし て材料も同じとする。 σ max 0.308 pb 2 0.308 × (20 × 106 )(532 × 10 −6 ) 2 6 = = = 9040 × 10 [Pa] = 9040 [MPa] −6 2 2 h (13.887 × 10 ) 3 wmax 3 0.0138 pa 4 0.0138 pa a 0.0138(20 × 106 ) × (532 × 10 −6 ) 532 × 10 −6 = −43 × 10 −6 [m] =− =− =− 6 −6 3 Eh E 190000 × 10 h 13.887 × 10 降伏応力7000MPaを大きく超えるため危険 → 板厚 h を増やす 形状による最大曲げ応力および最大たわみの比較 条件: 面積、板厚、材料特性、負荷圧力が同一であるとする。 形状 円形 長方形 正方形 最大応力(MPa) 7000 7293 9040 最大たわみ(µm) 55.97 21.76 43.00 上の比較結果より応力的には円形が最も有利で正方形が最も不利。 しかし円形ダイヤフラムはたわみも大きい。しかしシリコンウェハから の切り出し易さからいまだに正方形状はセンサなどによく使われる。 薄板の静的曲げ(例題:周端部を拘束した正方形円板の曲げ) [問題] マイクロ圧力センサにおける正方形ダイヤフラムの 最大たわみ、最大応力を求めよ。 ただしダイヤフラムは7000 MPa の降伏点を越える ことなく 70MPa の圧力に耐えるよう設計する。 シリコンダイヤフラムのヤング率E=190000 MPa, ポアソン比ν=0.25 とする。 この783 µm 四方の正方 形がたわむ 薄板の静的曲げ(例題:周端部を拘束した正方形円板の曲げ) 最大曲げ応力(端辺の中央) σ max 0.308 pa 2 = h2 (9) 最大たわみ(重心) wmax 0.0138 pa 4 =− Eh 3 (10) a=783×10-6 [m], h=266 783×10-6 [m], p=70×106 [Pa] したがって ( ) σ max 0.308 × 70 ×106 × (783 ×10 −6 ) 2 = = 186.81[ MPa] < 7000 [ MPa] −6 2 (266 ×10 ) wmax 0.0138 × 70 × (783 × 10 −6 ) 4 =− = −10153 × 10 −11 [m] = −0.1015[ µm] −6 3 190000 × (266 × 10 ) 機械的振動 1自由度のバネ・マス系 d 2 X (t ) m + kX (t ) = 0 2 dt (11) バネ・マス系 の自由振動 (11)式の一般解 バネ・マス・ 減衰系の 自由振動 バネ・マス系 の強制振動 X (t ) = C1 cos(ωt ) + C2 sin(ωt ) (12) C1, C2 は初期条件できまる定数 ω= k m f = ω 2π [rad/sec] [Hz] 固有振動数、自然周波数、共振周波数 機械的振動(計算事例 1) 問題: 質量 10mg のマスがバネ定数 k=6×10-5 [N/m] に吊るされた系の 振動における振幅と周波数を求めよ。最初に系が釣り合った状態から 鉛直下方に 5 µm 下げた状態から開始するものとする。 解答: 初期変位 初期速度 X(0) = 5 × 10-6 [m] C1=5×10-6 , C2=0 & (0) = 0 [m/sec] X 微分方程式の解は X (t ) = 5 ×10 −6 cos(ωt ) k 6 ×10 −5 ω= = = 2.45 m 10 −5 2.45 ω f = = = 0.39 2π 2 × 3.14 [rad/sec] [Hz] 機械的振動(計算事例 2) 問題: 質量 10mg のマスがバネ定数 k1=k2=6×10-5 [N/m] の2本のバネで 水平方向に支持されて平衡状態にある。この系の振動における振幅と 周波数を求めよ。最初に系が釣り合った状態から横方向に 5 µm 変位した 状態から開始するものとする。 解答: 微分方程式 mX&& (t ) + (k1 + k 2 ) X (t ) = 0 k1 + k 2 (6 + 6) × 10 −5 ωn = = = 3.464 [rad/sec] −5 m 10 機械的振動(バネ・マス・ダッシュポット系) dX (t ) d 2 X (t ) + + kX (t ) = 0 c m 2 dt dt (13) 減衰係数 λ=c/2m の大きさによって3通りの応答が考えられる 1. λ2−ω2 >0 (過減衰) X (t ) = e 2. − λt (C1e t λ2 −ω 2 + C2 e − t λ2 −ω 2 ) λ2−ω2 =0 (臨界減衰) X (t ) = e − λt (C1 + C2t ) 3. λ2−ω2 <0 (不足減衰) X (t ) = e − λt (C1 cos ω 2 − λ2 t + C2 sin ω 2 − λ2 t ) 機械的振動(共振・発振) バネ・マス系に最大振幅F0 、周波数αの外力を加えることを考える d 2 X (t ) + kX (t ) = F 0sin αt m 2 dt (14) 微分方程式の解は X (t ) = F0 (−α sin(ωt ) + ω sin(αt )) 2 2 ω (ω − α ) この解はω=αのとき分母・分子共にゼロとなり解不定となる。 そのときの解はL’Hospitalのルールより F0 F0 X (t ) = sin(ωt ) − t cos(ωt ) 2 2 2ω 2ω
© Copyright 2026 Paperzz