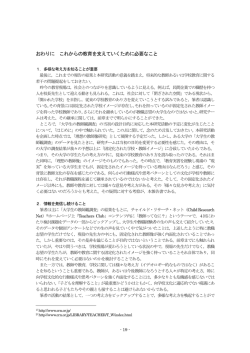
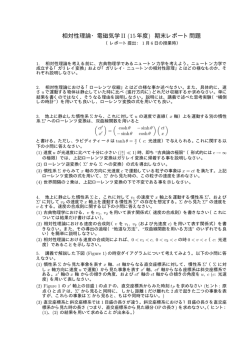
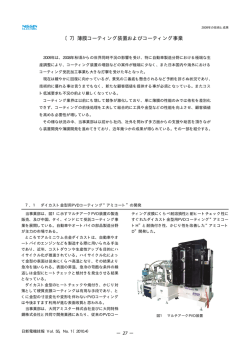
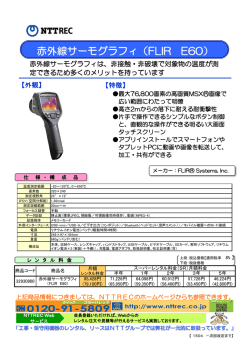
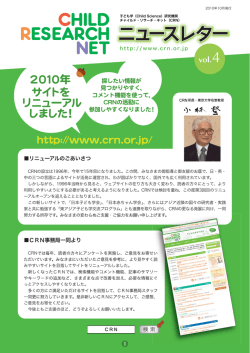
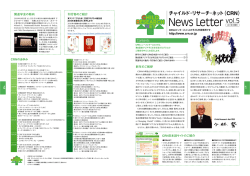
1 第 1 章 相対性理論入門 1.1 Maxwell の波動方程式 物理の法則は向きを変えても同じ形で成り立つ,というのがガリレオの x 相対性原理です.数学的にいえば,座標を y で表すとき,直交行列 U z (t U = U −1 ) を用いて 0 x x U y = y 0 z z0 0 x で表される新しい座標系 y 0 でも同じ法則が成立するということです. z0 しかし,マックスウエル (ジェームズ クラーク,1831-1879) が導いた電磁 場に関する方程式は 1 ∂2 )E = 0 c2 ∂t2 が直交変換で不変でないことがわかります.これはで電磁場に関する波動方 程式で,真空中の光速が一定の値であることが導かれてしまいます.これは (∆ − おかしいことです.電車だったら,止まっている人が見る速度より,電車と 平行に走っている車から見た方が電車の速度は遅くみえるはずです.このこ とが電車のかわりに光にすると起きないということになります. 1.2 Lorentz 変換 そこでアインシュタイン (アルバート,1897-1955) の登場になります.彼は 1905 年に,光電効果の理論,ブラウン運動と相対性理論の3つの論文を発表 しました.1905 年は物理学史上最大の年ともいえるでしょう. A と B の 2 人を考えましょう.B は A に対して一定の速度で移動している (等速直線運動) としましょう.さらに,簡単のため時刻 0 で 2 人は同じ場所 にいたとしましょう.座標として,今までの x, y, z だけでなく,時間 t も含 めようというのが,アインシュタインの考え方です.時間は t と表すよりも, 光の速度 c 倍して,ct と表した方が後ですっきりとした形を得ることができ 第 1 章 相対性理論入門 2 ct0 ct 0 x x ます.そこで,A からみた座標系を y , B からみた座標系を y 0 とす z0 z ることにします.そこで,直交行列による座標変換と同様に,2 人の座標の 間には行列 L を用いて ct0 ct 0 x x L y = y0 z0 z と表せると仮定するのです.この L をローレンツ変換といいます. 時刻 0 に原点を出発した光は時刻 t に x2 + y 2 + z 2 = (ct)2 をみたす x, y, z にいることになります.言い換えれば −(ct)2 + x2 + y 2 + z 2 = 0 をみたします.一方,B から見ても光の速度は c ですから −(ct0 )2 + x0 + y 0 + z 0 = 0 2 2 2 をみたしていなければなりません.一般に −(ct)2 + x2 + y 2 + z 2 = −(ct0 )2 + x0 + y 0 + z 0 2 をみたしているはずです.行列で表現すると −1 0 −(ct)2 + x2 + y 2 + z 2 = (ct, x, y, z) 0 0 2 2 ct 0 0 0 x 1 0 0 0 1 0 y z 0 0 1 (1.1) 1.2. Lorentz 変換 3 ですから,式 (1.1) は ct 0 0 0 0 x 1 0 y z 0 1 ct0 −1 0 0 0 0 0 1 0 0 x = (ct0 , x0 , y 0 , z 0 ) 0 0 1 0 y 0 z0 0 0 0 1 ct −1 0 0 0 0 1 0 0 x = (ct, x, y, z)t L 0 0 1 0 L y z 0 0 0 1 −1 0 0 1 (ct, x, y, z) 0 0 0 0 すなわち −1 −1 0 0 0 0 1 0 0 t 0 0 0 1 0 = L 0 0 0 0 0 1 0 0 0 1 0 0 L 0 1 0 0 0 1 をみたしていることになります.これがローレンツ変換の条件です. さて,具体的に L を求めてみましょう.x, y, z の座標は直交変換で変える ことができますから,B は A の x 方向へ速度 v で移動しているとします.さ らに,y 0 , z 0 は y, z と同じ向きになるようにとります.x 方向にしか動かない し,2 人の y 座標と z 座標は共通ですから,時間軸と x 座標だけを考えれば ( ) ct ,B の よいと考えられます.そこで以降は y, z を省略して,A の座標を x ( ) ct0 座標を と表しましょう.ローレンツ変換を表す行列を x0 ) ( p q L= r s で表しましょう.2 つの座標の間には ( ) ( ) ct ct0 L = x0 x が成立します.これは成分で表せば pct + qx = ct0 rct + sx = x0 第 1 章 相対性理論入門 4 が成り立ちます.一方,光速度一定の原理 −(ct)2 + x2 = −(ct0 )2 + x02 から t ) ) ( ( −1 0 −1 0 L= L 0 1 0 1 が成立します.これを成分で表すと −p2 + r2 = −1 (1.2) −q 2 + s2 = 1 (1.3) −pq + rs = 0 (1.4) を得ます.不定数が p, q, r, s の 4 つ,式は 3 つですから,これだけではもち ろん,L を特定はできません.B が A に対して速度 v で移動していることを ここで用いましょう.以下では速度は光の速度と比較して β = v c で表すこと にします. x0 = 0 というのは, rct + sx = 0 ですので, r x = − ct s を得ます.一方 v ct = βct c が成り立ちます.これで式 (1.2),式 (1.3),式 (1.4) と合わせれば解くこと ができて, √1 2 √1 2 √β 2 −√ β 2 1−β 1−β 1−β 1−β , √1 2 −√ β 2 −√ β 2 −√ 1 2 1−β 1−β 1−β 1−β β β 1 1 √ −√ −√ −√ 2 2 2 2 1−β 1−β 1−β 1−β , √β 2 √1 2 √β 2 −√ 1 2 x = vt = 1−β 1−β 1−β 1−β の 4 つの候補がでてきます.速度 v = 0 のときに,A と B の 2 人の座標は一 致しなければならないですよね.だとすると,上の 4 つの中で v → 0 すなわ ち,β → 0 としたときに L が単位行列になるのは √1 2 −√ β 2 1−β 1−β L= √1 2 −√ β 2 1−β 1−β でなければならないことがわかります.ct0 軸は x0 = 0,つまり位置は 0 のま ま時間だけがたっていくところですから,B の原点です.したがって,A か 0 ct 1.3. ローレンツ収縮 ct 5 ct0 x0 x vt0 図 1.1: 時間軸と x 軸 ら見れば x 軸方向に速度 v で遠ざかっていきます.図 1.1 のように,ct0 軸は 傾き 1/β の直線です.同様に x0 軸は傾き β の直線になります. β を変化させたときの座標軸の変化を図 1.1 に表してみました.図の曲線 は座標軸の上の点 (ct0 , x0 ) = (1, 0), (0, 1), (2, 0), (0, 2) を β を 0 から 1 まで変 化させたときの図です.β = 1 になると,B は光速で移動していることになっ て,時間軸 ct0 と x0 軸は一致してしまいますし,4 つの点は無限のかなたに 飛んでいってしまいます. 1.3 ローレンツ収縮 さあ,相対論の不思議な世界をかいま見てみましょう.A の座標で止まって いる長さ L の棒を考えましょう.棒は x 軸に平行に a から a(+ L)のところにあ ( ) ct ct るとします.どの時刻でも同じところにあるのですから, と a a+L に棒の先端はあります.この座標を B でみると,ローレンツ変換から ( ) ct−βa √ ct 1−β 2 = −βct+a L √ a 1−β 2 ( ) ct−β(a+L) √ ct 1−β 2 L = −βct+a+L √ a+L 2 1−β 第 1 章 相対性理論入門 6 ct0 : β = 1/3 ct 4 x0 = ct0 : β = 1 ct0 : β = 2/3 3.5 3 2.5 x0 : β = 2/3 2 1.5 x0 : β = 1/3 1 0.5 a 1 0.5 a+L 1.5 2 x 2.5 3 3.5 4 ct0 表 1.1: 座標軸の変化 ct x0 x a a+L 表 1.2: ローレンツ収縮 1.4. 時計の遅れ 7 となります.B で長さを測るには左右の両端を同じ時間に測らなければなり ません.すなわち,B で時刻 t0 のときに両端を測るとすると,a を計る A の 時間 t1 と a + L を測る A の時間 t2 とは異なることになります.式で表すと ct1 − βa ct2 − β(a + L) √ ct0 = √ = 2 1−β 1 − β2 になります.したがって ct1 = ct2 − βL をみたします.B で見た長さは −βct2 + a + L −βct1 + a √ √ − √ = 1 − β2L 1 − β2 1 − β2 √ を得ます.静止している系で長さ L の棒が動いている系では 1 − β 2 L にな るというわけです.図 1.2 は長さ L = 1 の棒が β = 1/3 のときに縮んでいる 様子を示しています.光の速度で移動していれば β = 1 ですから,長さが 0 になってしまうのです. 1.4 時計の遅れ A で時間が ∆ 経過したときに,移動している B ではどれくらい時間がた つかを見てみましょう.ローレンツ変換から ( ) ct−βa √ ct 1−β 2 L = −βct+a √ a 1−β 2 ) c(t+∆)−βa ( √ c(t + ∆) 1−β 2 = −βc(t+∆)+a L √ a 2 1−β です.B の同じ場所で時間を計らなければなりませんが,B にとって同じ場 所でも,A にとっては異なる場所になるわけで −βct + a1 −βc(t + ∆) + a2 √ √ = 2 1−β 1 − β2 より a1 = a2 − βc∆ をみたすことになります.B にとっての時間経過を ∆0 とすると c(t + ∆) − βa2 ct − βa1 √ −√ 2 1−β 1 − β2 √ = 1 − β 2 c∆ c∆0 = 第 1 章 相対性理論入門 8 ct ct0 c(t0 + ∆) x0 ct0 x 表 1.3: 時間の短縮 となります.速い速度で移動すれば時計はゆっくりと進むことになります. 図 1.3 は ∆ = 1 のときに,時間が短縮している様子を表しています.β = 1/3 です. 光と同じ速度で移動すればまったく時計が進まないことになるわけです.こ れがいわゆる双子のパラドックスです.双子の片方が地球に留まり,もう 1 人が光速に近いスピードで宇宙を旅して戻ってくると,光速に近い宇宙船に 乗っていた人は時間がほとんどたたず若いままでいるはずです.これはおか しいって.いいえ,もっと変なのは,相対性理論とはすべての物事が相対的 に見ることができるという理論です.したがって,絶対静止系というのは存 在しないのです.宇宙船に乗っている双子の 1 人から見れば,地球が光速に 近いスピードで遠ざかっていったはずですから,地球に残った方が年をとっ ていないはずです.いったいどっちがおじいさんになっているのでしょうね. これの解決は, 「戻ってくる」というところです.今,ここで考えている特 殊相対性理論とは,同じ速度で移動し続ける等速運動のときにのみ,適用で きる理論です.地球を出発したり,途中で方向を変えて戻ってくるには,力 が働かなければなりません.これは一般相対性理論といわれるもっと大きな 理論の枠組みで考えなければならないのです.
© Copyright 2026 Paperzz