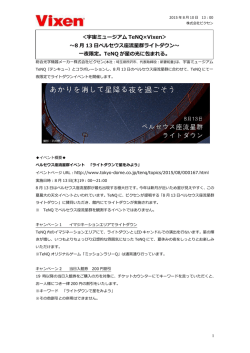
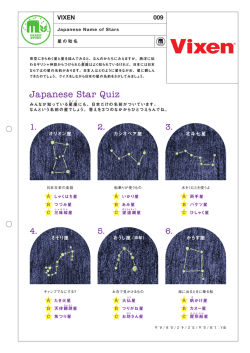
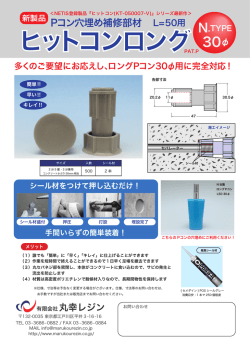
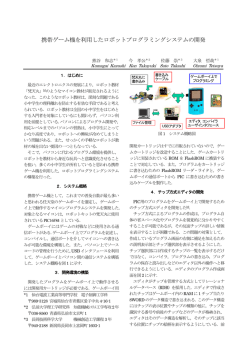
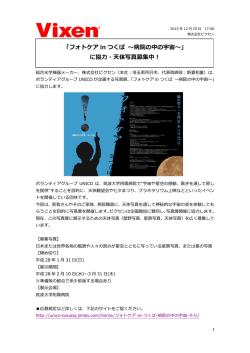
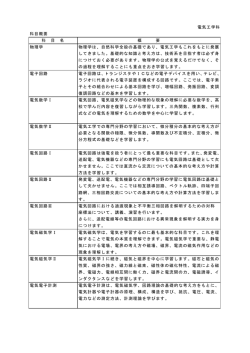
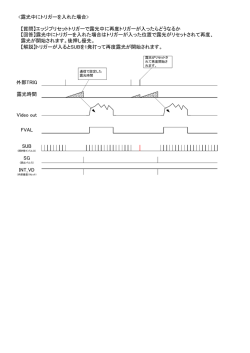
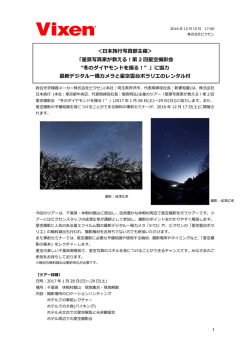
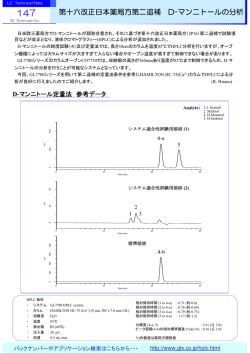
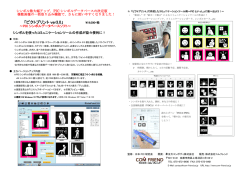
きれいな星空を撮影するために ~赤道儀の製作~ 3班 阿由葉翔 1.はじめに 空気の澄んだ晴れた日の夜には,星がよく見える. その美しい星空を写真に残そうと思い,実際にカメ ラのシャッターをきってみると難しいことが分かる. 普通に写真を撮る方法では,星の光は弱いため,ほ とんど写真は真っ暗になってしまう.その為より多 くの星の光をたくさん取り入れようとする場合,露 光時間を長くとる必要がある.しかしこの方法では, 星は「点」ではなく「線」で写ってしまう.この現 象は地球の自転によって生じるものである. カメラは基本的に「露光時間(シャッタースピー ド)」, 「ISO 値」, 「絞り」の 3 種類の値をうまく調節 して撮影する.天の川などの星空の写真を撮る場合, 露光時間を長く,ISO 値を小さく設定すると比較的 ノイズの少ないきれいな星空を取ることができる. しかし,前述のように露光時間を長くして撮影する と星は「線」で写ってしまう.そのため,露光時間 を長く設定して,星が「点」で撮影できるものが必 要になる.これが赤道儀である. 現在販売されている赤道儀は高精度であるが,そ の多くは高価である.よって今回は,安く精度のい い赤道儀を製作することを目的とする. 2.赤道儀の原理 赤道儀の動作原理を図 1 に示す. 図 1 赤道儀ポラリエ(Vixen) 通常赤道儀は図 1 で示すように,カメラを載せた 自由雲台と三脚の間に挟んで使用する.この時,赤 道儀の回転軸と北極星方向の極軸を一致させる必要 がある.これは,星が北極星を中心に一日一周する ためである.つまり,自由雲台が星の動きに合わせ て動くことで,雲台の上に載っているカメラが星を 追尾することが可能になる. 図 1 に示しているのは小型赤道儀,すなわちポー タブル赤道儀で代表的な製品,Vixen の星空雲台ポ ラリエ(定価 47000 円)である.今回はポラリエと同 じ方式で,安く精度のいいものを製作することを目 標とする. 3.構造提案と製作 一般的に赤道儀は,ポラリエのようなウォームホ イールを用いた全周微動方式と,手動微動装置を用 いたタンジェントスクリュー方式が存在する.今回 は前述のようにポラリエの全周微動方式を採用する. 図 2 製作した赤道儀の内部構造 図 2 に今回製作した赤道儀の内部構造を示した. 全周微動方式ではウォームホイールで回転を出力し, 雲台を回転させるため,ウォームホイールが一日に 1 周するように設計する.回転の入力部には従来の 赤道儀でも採用されているステッピングモータを使 用し,モータの制御には PIC ステッピングモータキ ットを使用した.しかし,初期状態ではモータの回 転数は早すぎるため,回転数を減速させる必要があ る.減速方法は,PIC プログラミングをする方法と, 基板の部品を付け替える方法が考えられる.今回使 用したキットの PIC はワンタイム式であり,プログ ラムの書き換えができないものであり,また代替プ ログラムを用意する時間はなかったため,今回は基 板の部品を付け替えた.具体的には付属の半固定ボ リューム(可変抵抗)を 10kΩから 200kΩに変更し抵 抗値を上げ,モータの減速を確認した.しかし,こ の方法では正確にモータの回転数を制御することが できない.そのため今回は,モータの一回転の所要 時間から 1 日に回転数を計測した.その結果,モー タは約 7.2min/1 回転であった.これより一日のモー タ回転数は 60 7.2 24 200 (rev/day) (1) である.よってウォームホイールでの出力回転数を 1 回転/1 日にするためには速度伝達比を 200 にする 必要がある.速度伝達比は式(2)で与えられる. 速度伝達比 従動歯車の歯数 (2) 駆動歯車の歯数 この式を用いて,市販の平歯車の歯数を組み合わ せ,速度伝達比を 200 にする. 36 18 30 18 60 1 (3) 200 今回用いた歯車の歯数より,式(3)で示すように速 度伝達比を 200 にすることができた.これで理論上, 雲台は一日 1 回転することになる. 次に,使用するステッピングモータの入力定格電 圧は 12V であるが,このモータは高出力仕様のため, DC12V で仕様するとかなりの高温になる.今回は連 続仕様を想定したため,入力電圧は 1.5×6=9V に設 定した.電源は使用の易化のため,単三電池 6 本で 電源供給をした.外装は軽量で且つ強度を維持する ためアルミ平版を採用した.スイッチは操作性の点 から ON/OFF のみのロッカースイッチ機構を採用,雲 台接続部分はシャフト先端を 1/4 インチねじに加工 した.三脚固定部はアルミ角材を加工したものに, めネジ穴を安定の関係から側面部に作り設置した. 今回製作に使用した部品表を表 1 に示す. 表 1 物品表 製品名 品番 SSY平歯車 SSY1-18 SSY平歯車 SSY1-30 SSY平歯車 SSY1-36 オイレス#80 フランジブッシュ 80F-0603 オイレス#80 フランジブッシュ 80F-0803 SWウォーム SW0.8-R1 DG ウォームホイール モジュール0.8 DG0.8-60R1 YSAA形スタンダードリニアシャフト YSAA6×50 YSAA形スタンダードリニアシャフト YSAA8×100 アルミ丸パイプ 生地 0.5x4 Φ x1m アルミ平板 HA2230 2×100×300mm アルミ チャンネル(A6063) T3×W40×H20 長さ550mm セットカラー スタンダード型 M0605 セットカラー スタンダード型 M0805 半固定ボリューム 200kΩ 小形ロッカースイッチ A8M 電池ボックス 電池ボックス リード線付 バッテリースナップ ステッピングモーターST-42BYG0506H PICステッピングモータドライバキット 合計金額 個数 金額 2 1 1 4 2 1 1 1 1 1 1 1 2 2 1 1 2 1 2 1 1 ¥798 ¥507 ¥571 ¥320 ¥63 ¥593 ¥1,285 ¥516 ¥258 ¥161 ¥490 ¥1,028 ¥182 ¥192 ¥50 ¥169 ¥40 ¥60 ¥20 ¥1,000 ¥1,200 ¥9,503 今回は如何に既製品よりも安価に製作することが 可能かという点も重要であるため,ねじやアルミ角 材は余っている廃材を使用した. 4.製作品と考察 図 3 に 3 章の方法で製作し,完成した赤道儀およ びその CAD 図面を示す.図のように三脚とカメラの 間にかませる形で設置する.駆動が確認できるよう に側面部の 1 面は開放してある.実際に起動した結 果,歯車のかみ合わせはしっかりと駆動するという 結果が得られた. 図 3 製作した赤道儀および CAD 図面 この赤道儀を使用して星空を撮影して,赤道儀の 精度確認の実験をした.図 4-a は赤道儀を起動して いないもの,図 4-b は赤道儀を起動して撮影したも のである.2 枚の写真は共に ISO-200,F8,露光時間 90 秒に設定して,こいぬ座のプロキオンを撮影した. 図 4-a 未使用時 図 4-b 使用時 二つの図から分かるように赤道儀を使用した図 4-b のほうが,使用してない図 4-a よりも星の軌跡 が点に近いことが分かる.これは赤道儀が回転しカ メラのレンズが星を追尾して,星の日周運動とレン ズの相対速度が 0 に近づいているためであると考え られる.しかし,完全に相対速度が 0 になってはい ないため,星は通常の 1/2 程の速度になっている. この原因は 2 つ考えられる.まず,極軸合わせ,つ まり出力軸と北極星の方向である極軸が完全に一致 できていなかったために,回転軸のズレが生じてい たということが考えられる.回転方向が一致してい なければ,相対速度も 0 にはならない.もう一つは 設計上の問題である.図 2,3 から分かるように歯車 を複数枚組み合わせているため,初期設計から誤差 が生じる可能性が考えられる.また回転数を目視で 計測したため,真の回転数とは異なっていた可能性 が考えられる. 5.結論 今回の目的の 1 つである製作費の安さは,既製品 の値段の 1/5 にまで抑えることが実現できた.精度 についてはまだ改善点があるが,実験結果より製作 した機構は十分に機能していたことが確認できた. 改良を重ねることで,さらに精度のいいものが製作 できると考えられる. 参考文献 1)http://weekly.ascii.jp/elem/000/000/124/1249 14/ (Vixen)(2014/12/20 参照)
© Copyright 2026 Paperzz