システム技術開発調査研究
21-R-5
複数衛星連携システムに関する
調査研究
報 告 書
-要 旨-
平成 22 年 3 月
財団法人 機械システム振興協会
委託先 財団法人 無人宇宙実験システム研究開発機構
この事業は、競輪の補助金を受けて実施したものです。
http://ringring-keirin.jp/
序
わが国経済の安定成長への推進にあたり、機械情報産業をめぐる経済的、社会的諸条
件は急速な変化を見せており、社会生活における環境、防災、都市、住宅、福祉、教育
など、直面する問題の解決を図るためには、技術開発力の強化に加えて、ますます多様
化、高度化する社会的ニーズに適応する機械情報システムの研究開発が必要でありま
す。
このような社会情勢に対応し、各方面の要請に応えるため、財団法人機械システム振
興協会では、財団法人JKAから機械工業振興資金の交付を受けて、機械システムに関
する調査研究など補助事業、新機械システム普及促進補助事業を実施しております。
特に、システム開発に関する事業を効果的に推進するためには、国内外における先端
技術、あるいはシステム統合化技術に関する調査研究を先行して実施する必要がありま
すので、当協会に総合システム調査開発委員会(委員長 東京大学
名誉教授 藤正 巖
氏)を設置し、同委員会のご指導のもとにシステム技術開発に関する調査研究事業を実
施しております。
この「複数衛星連携システムに関する調査研究報告書」は、上記事業の一環として、
当協会が財団法人無人宇宙実験システム研究開発機構に委託して実施した調査研究の
成果であります。今後、機械情報産業に関する諸施策が展開されていくうえで、本調査
研究の成果が一つの礎石として役立てば幸いであります。
平成22年3月
財団法人機械システム振興協会
i
はじめに
本報告書は、財団法人無人宇宙実験システム研究開発機構が、財団法人機械システム
振興協会から受託した「複数衛星連携システムに関する調査研究」に関し、平成21年
度の調査検討結果をまとめたものです。
宇宙をめぐる我が国の状況は大きく変化しました。議論がなされていた宇宙基本法が平
成20年度に成立/施行され、平成 21 年度には今後の宇宙開開発や利用の方針を示す宇
宙基本計画が成立しました。これにより、国民生活のために宇宙開発が果たすべき役割
はますます大きくなってきています。また近年は商用ビジネスの本格化も緒についてお
り、併せて国際的にも宇宙開発を通じて海外との協力など我が国に期待される役割も増
大してきております。
単独で高い機能性能を有する大型複合衛星に対して、複数の衛星を組み合わせること
により達成できる能力は、限定された能力の小型衛星であってもシステムとして高い機
能を実現できる可能性を秘めています。日常生活に欠くことのできない全地球測位シス
テム(GPS 衛星 30 機)や、低高度周回衛星を使った通信衛星システムによる船舶の動
態管理(ORBCOMM 衛星 30 機)、小型衛星を複数使った観測衛星(DMC 衛星 5 機)などが
代表例で、更に今後の発展が期待されています。複数衛星システムの実現は、宇宙の利
用の更なる拡大、宇宙産業の振興につながるキーファクタになりえます。
この複数衛星連携システムについて、世界の動向、観測衛星に適用した場合の有効性
などについて、調査研究した結果をまとめたものが本報告書です。この検討にあたって
は、本機構内に「複数衛星連携システムに関する調査研究検討委員会:委員長
真一 東京大学大学院工学系研究科・航空宇宙工学専攻
中須賀
教授」を設置し、各分野の専
門の委員の皆様から熱心なご討議、ご指導をいただきました。
本調査研究の成果が関連各社にとって参考となり、機械振興の一助となれば幸いです。
平成22年3月
財団法人
ii
無人宇宙実験システム研究開発機構
目次
序
はじめに
1
調査研究の目的 ............................................................ 1
2
調査研究の実施体制......................................................... 2
3
調査研究成果の要約......................................................... 6
第 1 章 既存システムのコンセプト調査 ........................................... 9
1.1 概要 .................................................................... 9
1.2 複数衛星連携システムに関する国内外動向の調査 ............................ 10
1.2.1 複数衛星連携システムの定義 .......................................... 10
1.2.2 コンステレーション.................................................. 11
1.2.3 フォーメーションフライト ............................................ 17
1.2.4 動向の調査のまとめ.................................................. 21
1.3 複数衛星連携システムのニーズ調査 ........................................ 24
1.3.1 分野毎の特徴的ニーズ把握 ............................................ 24
第 2 章 複数衛星連携システムの有効性分析 ...................................... 29
2.1 概要 ................................................................... 29
2.2 コンステレーション衛星システムの有効性分析 .............................. 30
2.2.1 観測頻度の向上...................................................... 30
2.2.2 観測品質の向上...................................................... 32
2.2.3 シミュレーション: 日本上空での観測区域と衛星数の関係 ................ 35
2.2.4 データ取得即応性の向上 .............................................. 38
2.3 フォーメーションフライト衛星システムの有効性分析 ........................ 39
2.3.1 複数化・連携に着目した有効性分析 .................................... 39
2.3.2 SAR センサによるフォーメーションフライト衛星システムの有効性分析 .... 41
第 3 章 実現技術の分析........................................................ 48
3.1 概要 ................................................................... 48
3.2 通信技術の調査検討...................................................... 49
3.2.1 既存の複数衛星連携システムの通信技術調査 ............................ 49
iii
3.2.2 衛星間通信技術...................................................... 52
3.3 軌道/姿勢制御技術の調査及び制御方式の検討 ............................... 54
3.3.1 種々のフォーメーションフライト軌道 .................................. 54
3.3.2 軌道/姿勢制御方式の調査及び検討 ..................................... 58
3.3.3 フォーメーションフライト実現に向けた技術課題 ........................ 58
第 4 章 将来複数衛星連携システムの検討 ........................................ 63
4.1 概要 ................................................................... 63
4.2 コンステレーションシステムの検討 ........................................ 65
4.2.1 光学衛星コンステレーションによる多頻度/即応観測ミッション例 ........ 65
4.2.2 SAR 衛星コンステレーションによるデータ取得即応型ミッション例 ........ 67
4.3 フォーメーションフライト衛星システムの検討 .............................. 75
4.3.1 複数 SAR 衛星システム検討 ............................................ 76
4.3.2 小型/超小型衛星によるフォーメーションフライト衛星システムの検討 .... 81
4.3.3 Satellite Community システムの検討 .................................. 82
4.3.4 大型構造物構築型フォーメーションフライト衛星システムの検討 .......... 86
4.4 運用システム・運用方法及び軌道の検討 .................................... 88
4.4.1 コンステレーション衛星システムの軌道検討 ............................ 88
4.4.2 フォーメーションフライトに関する軌道検討 ............................ 99
4.4.3 運用方法の検討..................................................... 100
4.4.4 運用システムの検討................................................. 106
4
調査研究の今後の課題及び展開 ............................................. 107
参考文献 .................................................................... 108
iv
1 調査研究の目的
災害監視、環境観測、安全監視、資源探索などのための地球観測衛星に対する需要及び衛
星取得情報の高分解能化、高性能化、多次元化、高頻度化の要求が増大しているが、現状の
単一衛星による実現では要求達成に限界及びリスクがあり、低価格な(小型)衛星を複数活
用した連携システムでの実現が求められる。
複数衛星連携システムに関する動向として、海外では GPS/IRIDIUM などでコンステレー
ション注1)の実施例はあるが、フォーメーションフライト注1)の実用例については少ない。
近年、欧米にて低価格な小型衛星の開発研究が急速に進展しており、これらの複数衛星を活
用する運用形態への応用が具体化されつつある。国内では ASNARO(「小型化等による先
進的宇宙システム」(平成 20 年度―22 年度 NEDO 研究開発プロジェクト))など低コスト
小型衛星の研究開発、太陽光発電衛星の調査研究などが進められており、これらの成果との
連携を活かし、複数衛星連携システムに関する調査研究をスタートするに適切なタイミング
である。
複数衛星システムの有効性に関し、定量的な効果及び費用対効果を明確にすることが国家
側の開発計画として立案する場合の論理展開に必要である。
このような背景から、平成 21 年度より 3 年間の調査研究期間にて、低価格な小型衛星を
複数活用した複数衛星連携システムに関し、その有効性・実現性を具体化し、国側の開発計
画立案に結びつくシステム構築検討を開始した。
初年度は、コンステレーションやフォーメーションフライトなど既存システムのコンセプ
ト調査を実施し、複数衛星連携システムの有効性を評価する。さらに実現化のための技術分
析、技術課題抽出を実施し、将来実現すべき複数衛星連携システムのコンセプト構築を実施
する。
注1)コンステレーション及びフォーメーションフライトは、複数の衛星を運用する形態
例を示すもので、その定義は以下による。
・コンステレーション:広い領域での分散配置(多数の衛星を複数の軌道面に投入)に
よるシステム運用形態
・フォーメーションフライト:狭い領域での相互連携配置(多数の衛星を近接する軌道
位置に投入)によるシステム運用形態
1
2 調査研究の実施体制
本調査研究の実施体制は、(財)機械システム振興協会内に「総合システム調査開発委員
会」を、(財)無人宇宙実験システム研究開発機構内に「複数衛星連携システム検討委員会」
を設置し、本調査研究の計画、実施状況、実施結果について意見・アドバイスをいただきな
がら進めた。
(財)無人宇宙実験システム研究開発機構が本調査研究の取りまとめを実施し、
衛星システム解析は機構の技術要求に基づき衛星システムメーカに再委託し実施した。国内
外技術調査などは国内調査会社他に外注し実施した。
業務分担に関しては、以下の方針で進めた。
機構において実施計画の詳細化を行い、国内外の複数衛星運用システムや類似システムな
どの技術情報の収集を行う。これらのシステムの有効性、実現化のための必要技術、将来複
数衛星連携システムの検討を行い、複数衛星連携システムを実現するための課題抽出と解決
策を明らかにする。機構が実施する計画立案、技術検討などについては、機構内に設置する
技術委員会にて、計画や検討結果の妥当性などについて審議を受ける。
複数衛星連携システム実現のための軌道/制御技術などの衛星システム解析検討に関して
は、軌道/制御解析などが実施可能な衛星システムメーカに再委託を予定する。また海外情報
収集、国内外の要素技術情報調査及びシミュレーション解析については、国内の調査会社及
び衛星関係企業に発注して実施する。本調査研究で抽出した技術課題について、大学やその
他研究機関と共同研究をすることで有効に進展すると思われる内容に関しては、積極的に
「学」を活用していく。
2
実施体制を以下に示す。
財団法人無人宇宙実験システム研究開発機構
・
調査研究実施計画策定
・
全体取りまとめ
・
国内外の複数衛星運用システムや類似システムなどの技術調査
・
複数衛星連携システムの有効性分析
・
複数衛星連携システムの実現化技術分析
・
システム実現のキー要素技術の技術動向調査・分析
・
将来複数衛星連携システムの構想検討
・
委員会の運営
委員会
構
成:大学、官民の衛星/画像処理関係専門家
審議事項:調査研究計画、動向調査、構想検討の妥当性審査
再委託
三菱電機株式会社
・複数衛星連携実現のための軌道/制御方式の検討
・将来複数衛星連携システムの衛星システム検討
外
注
日本電気株式会社
・複数衛星運用に係る小型衛星システムの技術動向調査
・センサ及び通信方式の要素技術動向調査
外
注
富士通株式会社
・複数衛星連携システムの運用システム技術動向調査
・複数衛星連携システムの運用方法、軌道解析
外
注
株式会社三菱総合研究所
・観測衛星などでの複数衛星連携のニーズ、技術動向調査
外
注
LSAS Tec株式会社
・複数衛星連携システムのシミュレーション作業
3
総合システム調査開発委員会の委員名簿を以下に示す。
総合システム調査開発委員会委員名簿
(順不同・敬称略)
委員長
東京大学
藤
正
巖
太
田
公
廣
金
丸
正
剛
志
村
洋
文
中
島
一
郎
廣
田
藤
岡
名誉教授
委
員
埼玉大学
総合研究機構
教授
委
員
独立行政法人産業技術総合研究所
エレクトロニクス研究部門
研究部門長
委
員
独立行政法人産業技術総合研究所
デジタルものづくり研究センター
招聘研究員
委
員
早稲田大学
研究戦略センター
教授
委
員
東京工業大学大学院
薫
総合理工学研究科
教授
委
員
東京大学大学院
工学系研究科
准教授
4
健
彦
また、(財)無人宇宙実験システム研究開発機構内に置かれた「複数衛星連携システ
ム検討委員会」の委員名簿を以下に示す。
氏
中須賀
名
所
真一
属
国立大学法人
東京大学 大学院工学系研究科
(委員長)
航空宇宙工学専攻 教授
池本
多賀史
株式会社ニューズラボラトリー 会長
賀谷
信幸
国立大学法人
神戸大学大学院工学研究科
情報知能学専攻
斉藤
宏文
独立行政法人
教授
宇宙航空研究開発機構
宇宙科学研究本部
坂井
真一郎
独立行政法人
宇宙情報・エネルギー工学研究系
教授
宇宙航空研究開発機構
宇宙科学研究本部
宇宙探査工学研究系 准教授
汐川
雄一
財団法人
資源・環境観測解析センター
中村
正人
独立行政法人
宇宙航空研究開発機構 宇宙科学研究本部
山田
克彦
国立大学法人
名古屋大学大学院工学研究科
航空宇宙工学専攻
企画調査部長
教授
開催した委員会の開催日と主要テーマを以下に示す。開催場所はUSEF会議室。
第 1 回:2009 年
8 月 24 日(月)
調査研究の実施計画に関する審議
第 2 回:2009 年12 月 21 日(月)
調査研究の中間報告に関する審議
第 3 回:2010 年
調査研究の最終報告案に関する審議
2 月 25 日(木)
5
3
調査研究成果の要約
平成 21 年度から 3 年間での調査研究の内容を下図に示す。
第一段階: 調査研究
FY21
・既存システムのコンセプト調査、ミッション分野別ニーズ分析
・複数衛星連携システムの有効性評価
・実現技術の分析、技術的課題の抽出
・複数衛星連携システムのコンセプト構築
FY22
・複数衛星連携システムの最新動向調査
・複数衛星連携システムの実現化検討(技術課題に対する解決策)
・複数衛星連携システムのシステム構築検討
FY23
・将来複数衛星連携システムの適用検討
・システム開発構想の具体化 (技術課題解決のための技術
開発計画、複数衛星連携システムの開発計画の立案)
第二、三段階: 国家プロジェクト提言
技術開発プロジェクトの提案・構築
複数衛星連携システム開発プロジェクトの提案・構築
平成 21 年度は以下の 4 項目についての調査研究を行う。
(1)
既存システムのコンセプト調査
国内外の動向調査を行い、コンステレーションやフォーメーションフライトなど
により複数衛星による運用がなされているシステムや、検討がなされているシステ
ムを抽出し、そのコンセプトを調査する。
(2)
複数衛星連携システムの有効性分析
上記(1)で調査した既存システム調査結果を分析し、また離散化された複数衛星の
連携運用に対する解析を行うことで、複数衛星を連携させることによる有効性を分
析する。特に複数衛星での連携システムが単独衛星に比較してどのような要素にお
いてシステムの有効性が発揮されるかをシーズ・ニーズ両面から整理する。
6
(3)
実現技術の分析
複数衛星連携システムを実現するために必要な技術を分析し、技術的な課題を抽
出する。さらに、既存プロジェクトを含めた適用可能性のある技術(観測センサ、
運用、バスシステム)を抽出する。以上の結果を踏まえ、システムの早期実現のた
め、抽出した技術の有効性を分析する。なお、関連した要素技術の調査も併せて実
施する。
(4)
将来複数衛星連携システムの検討
将来実現すべき複数衛星連携システムを運用方法も含めて検討を行う。
検討したシステムの有効性を解析やシミュレーションなどにより明確化する。
本年度の調査研究成果の要約を以下に示す。項目毎に本節 1 章、2 章、3 章、4 章
にまとめている。
既存システムのコンセプト調査を踏まえ、単独衛星に比較してコンステレーショ
ンやフォーメーションフライトなどの複数衛星連携システムが有効性を発揮する要
素(ミッション性能項目:観測頻度、データ即応性、高精度三次元計測、移動体速
度検出など)を明らかにした。これらの要素に対し衛星機数や軌道配置などがどう
影響するかを分析し、複数衛星連携システムの有効性を定量的に整理した。さらに
複数衛星連携システムの実現技術分析として、必要な技術要素及び技術的課題を洗
い出し、主要素である通信技術や軌道/姿勢制御技術などについての調査・分析を実
施した。
以上の調査検討を踏まえ、将来実現すべき複数衛星連携システムについて複数の
コンセプトを構築した。
平成 21 年度実施の4検討項目毎の調査研究成果について以下に整理する。
(1)
既存システムのコンセプト調査
・ コンステレーションやフォーメーションフライトなどの複数衛星による
運用がなされるシステムに関し、国内外の既存プロジェクトを調査・抽
出した。
・ 09 年 度 宇 宙 航 行 ダ イ ナ ミ ク ス 国 際 シ ン ポ ジ ウ ム International
Symposium on Space Flight Dynamics
2009 及び AAS 誘導制御学会 33rd
AAS Guidance & Control Conference に参加し、フォーメーションフラ
イト衛星やコンステレーション衛星技術などの複数衛星連携システムの
海外動向を得た。
7
(2)
複数衛星連携システムの有効性整理
・ 単独衛星に比較してコンステレーションやフォーメーションフライトに
て有効性が発揮される要素(システムやミッション性能項目)を検討し
た。
・ コンステレーションでは、有効性評価の対象となる要素として、観測頻
度/再訪周期、データ即応性などが挙げられ、これらの要素に対し群飛行
での機数や軌道配置などがどう影響するかを分析し有効性を定量化でき
た。
・ フォーメーションフライトでは、有効性評価の対象となる要素として、
高精度三次元計測、移動体速度検出などが挙げられ、これらの要素に対
し群飛行での機数や軌道配置などがどう影響するかを定量的に分析し有
効性を定量化できた。
(3)
実現技術の分析
・ 複数衛星連携システムに必要な技術要素や技術的課題を抽出した。
・ 関連した要素技術の調査として、フォーメーションフライト軌道技術や
通信技術などの、最新の技術動向を調査した。
(4)
将来複数衛星連携システムの検討
・ 将来実現すべき複数衛星連携システムに関し、運用システムも含め、具
体化のための条件を整理した。
・ 将来実現すべき複数衛星連携システムに関し、複数のコンセプトを構築
した。
・ コンステレーション及びフォーメーションフライトのコンセプト事例に
対し、有効性解析を実施するとともに、可視化シミュレーションを実施
した。
8
第 1 章
1.1
既存システムのコンセプト調査
概要
国内或いは国外の既存システムの動向を調査し、コンステレーションとフォーメー
ションフライトの2種類に整理した。
コンステレーションは、広い領域での分散配置によるシステムで構成され、二つの
タイプに分類される。
タイプ A は、多数の衛星を複数の軌道面に投入することで、主に全球に均一にサー
ビスを展開するシステムである。例えば GPS 衛星、DMC(災害監視コンステレーション)
などがある。タイプ B は、単一衛星でも所定の機能を有し、例えば観測頻度向上など
を目的とした複数連携システムである。Rapideyes(商用コンステレーション)がそれ
にあたる。
フォーメーションフライトは、狭い領域での相互連携配置によるシステムで構成さ
れ、主に、複数の衛星が相対的な位置関係を維持しつつ、単一衛星では実現できない
サービスを提供するシステムである。例えば A-Train(NASA)、TanDEM-X(DLR)、F6(DARPA)
などである。
数百 kg 級の小型衛星市場動向における要素技術開発と商用・実用の関係を図 1.1-1
に示す。
【商用・実用】
小型衛星市場動向 (数百kg級)
【研究開発】
小型衛星及び要素技術開発
小型衛星バス開発
小型光学センサ開発
小型SARセンサ開発
小型ミッション機器開発
小型機器開発
フォーメーション技術開発
- Proba-3 (仏)
コンステレーション
有望な小型衛星市場
Civil/commercial remote sensing
①High-resolution Earth observation
②Landsat-class data for
environmental monitoring
Military
③Science and technology
④Intelligence, surveillance, and
reconnaissance
Civil/commercial communications
⑤Polling of unaffected sensors
⑥Remote site communication
- CanX-4/5 (加)
観測頻度向上型
-DMC/DMC-2
-RapidEye
-SAR-Lupe 他
全球カバー型
-IRIDIUM / IRIDIUM-Next
-ORBCOMM / ORBCOMM-Next(AIS)
-O3b Networks 他
フォーメーション
シリーズ
-Myriade (ESSAIM, SPIRALE他)
-SSTL100/150 (DMC, RapdEye他)
-TACSAT/ORS
-OFEQ (EROS他),OPSAT3000(TechSAR)
図 1.1-1
小型衛星市場動向(数百 kg 級)
9
1.2
複数衛星連携システムに関する国内外動向の調査
複数衛星による連携運用(コンステレーション、フォーメーションフライト)を実
施する国内外の衛星プログラムに関し、既存及び計画のプログラム情報及び技術情報
を収集し整理した。
1.2.1
複数衛星連携システムの定義
本調査研究においては、複数衛星連携システムの定義を以下のとおりとする。
1.2.1.1
コンステレーション
多数の衛星を複数の軌道面に投入することで、主に全球に均一にサービス展開する
ことを目的とした複数衛星連携システム
【代表例】NAVSTAR GPS(24 機+予備)、Iridium(66 機)
単一衛星でも所定の機能を有するが、例えば、地球観測ミッションなどにおいて、
主に観測頻度の向上を目的とした複数衛星連携システム。
【代表例】DMC(5 機+α)、COSMO-SkyMed(4 機)、 RapidEye(5 機)
1.2.1.2
フォーメーションフライト
主に、複数の衛星が相対的な位置関係を維持しつつ、単一衛星では実現できないサ
ービスを提供する複数衛星連携システム。
【代表例】TerraSAR/TanDEM-X、System F6、LISA、DECIGO
10
1.2.2
コンステレーション
1.2.2.1
全般
本調査研究においては、コンステレーションとは、主に多数の衛星を複数の軌道面
に投入することで、主に全球に均一にサービス展開することを目的とした複数衛星連
携システムのことを指す。本定義に当てはまるコンステレーションの一覧を表 1.2-1
に示す。
表 1.2-1
分野
プログラム名
Iridium
通信
Iridium-NEXT
主要コンステレーション一覧
国、運用機関
米 Iridium
Satellite LLC
米 Iridium
Satellite LLC
通信
ORBCOMM
通信
O3b
地球観測
RapidEye
独 RapidEye
地球観測
COSMO-SkyMed
伊 ASI
イタリア防衛省
地球観測
SAR-Lupe
地球観測
地球観測
ACE+
GPM
欧 ESA
国際協力
地球観測
Pleiades
欧 ESA
地球観測
Eros
Israel Aircraft
Industries
地球観測
RADARSAT
カナダ CAS
早期警戒
早期警戒
科学探査
地球観測
地球観測
RADARSAT
Constellation
GeoEye
Constellation
SBIRS
STSS
Swarm
ACE+
GPM
地球観測
Pleiades
地球観測
地球観測
米 ORBCOMM LLC
英 O3b Networks
Ltd.
独
国防省
カナダ
CAS
米 GeoEye
米 DOD
米 DOD
欧 ESA
欧 ESA
国際協力
欧 ESA
主要用途
サービス内容
衛星電話通信
衛星電話通信、
地球観測
衛星通信
低コストブロードバ
ンド
高頻度地球観測(光
学)
偵察
地球観測(レーダ)
偵察
地球観測(レーダ)
大気観測
高精度観測
高頻度地球観測
(光学)
高頻度地球観測
(光学)
地球観測
(レーダ)
地球観測
(レーダ)
観測データの
精度向上
ミサイル警戒、防衛
ミサイル発射検知
地球磁場観測
大気観測
高精度観測
高頻度地球観測
(光学)
機数
66
66+6(
予備
機)
35+18
16
5
4
5
4
8
2
3
2
3
5
6
24
3
4
8
2
注)ESA:European Space Agency, CAS:Canadian Space Agency, DOD:Department of Defence
11
1.2.2.2
RapidEye
独 RapidEye 社が 2008 年 8 月 29 日に Dnepr ロケットにより打ち上げた、衛星 5 機で
構成される商業コンステレーションプログラムである。RapidEye 社は 1998 年末に
Kayser-Threde と農林業を専門とする保険会社 Vereinigte Hagelversicherung によっ
て設立された衛星リモートセンシング事業会社であり、このプログラムでは 5 機の小
型衛星を同じ軌道に等間隔で配備することによる高頻度観測が特徴である。この 5 機
の衛星には、地上分解能 6.5m の光学センサを搭載しており、5 機が同一軌道で周回す
ることで、再訪周期 1 日(毎日の観測)を実現している。このミッションは、衛星画
像による地図作成、オルソフォト(正射投影写真図)の作成、自然災害評価、そして 3
次立体視画像の生成を主要な目的としている。 RapidEye の主要諸元を表 1.2-2 に示
す。
表 1.2-2
衛星数
衛星質量
製造
ミッション寿命
軌道高度
軌道傾斜角
周期
赤道通過時刻
システム構築経緯
1.2.2.3
RapidEye 主要諸元
5
166.4 kg
SSTL
7年
620 km
97.8°
太陽同期軌道
96.7 分
11:00am(降交点)
2008 年 8 月 29 日 4 機打上げ
SAR-Lupe
ドイツ国防省によるレーダ偵察衛星のコンステレーションプログラムで、三つの極
軌道面に対して、5 機の衛星を周回させることで、即応性がありかつ冗長性を持つシス
テムの実現を目指している。衛星には、X バンドレーダ画像システム(SAR 合成開口レ
ーダ)が搭載されており、1m 以下を識別可能である。衛星製造は OHB-Systems が行っ
た。このプログラムは、合成開口レーダによる偵察が主要目的であり、天気、日照度
のデータを取得、軍隊、配備された部隊などへの情報提供、その他、環境保全、資源
開発、災害管理地理データの取得も主要な用途とされている。SAR-Lupe の主要諸元を
表 1.2-3 に示す。
12
表 1.2-3
衛星数
衛星質量
製造
ミッション寿命
軌道数
軌道高度
軌道傾斜角
周期
回帰日数
システム構築経緯
1.2.2.4
SAR-Lupe 主要諸元
5
720 kg
OHB-Systems
10 年
3
500 km
98.18°
太陽同期軌道
94.3 分
11 日
2006 年 12 月 19 日
2007 年 7 月 2 日
2007 年 11 月 1 日
2008 年 3 月 27 日
2008 年 7 月 22 日
:1 号機打上げ
:2 号機打上げ
:3 号機打上げ
:4 号機打上げ
:5 号機打上げ
Iridium
衛星電話会社である Iridium 社によるコンステレーションプログラムである。11 の
軌道面(高度 780km の低高度周回軌道)に対して、各々6 機、計 66 機の衛星を周回さ
せることで、全球をカバーする。それにより、高頻度で衛星へのアクセスができるた
め、全世界の如何なる場所からも衛星電話の利用を可能としている。また、衛星間通
信(Cross-link)により、世界中に電話をすることが可能である。Iridium の主要諸元を
表 1.2-4 に示す。
表 1.2-4
衛星数
衛星質量
ミッション寿命
軌道数
軌道高度
軌道傾斜角
周期
回帰日数
システム構築経緯
Iridium 主要諸元
66
50 kg
15 年
11 (11 軌道面に各々6 機)
同一軌道上に 6 分間隔で衛星が並ぶ
780 km
86.4°
101 分
11 日
1997 年 5 月 5 日:打上げ開始
1999 年
:サービス開始
(現在 66 機が運用中)
2014 年~ :Iridium NEXT に引き継がれる
13
1.2.2.5
Iridium-NEXT
Iridium 社の次世代プログラムであり、既存システムとの互換性を持つ。主要用途と
しては衛星電話事業であるが、それ以外に低解像度画像センサ、海面表面の高さ推定
用レーダ高度計、地球放射線計測用広範囲電波計、大気湿度/温度計測用 GPS 受信機が
搭載されている。また、Iridium 同様に衛星間通信を行うことができるが、Iridium-NEXT
ではマイクロ波(Ka バンド)での通信が可能であり、センサデータを撮像から 5 秒後
には地上で受信することが可能である。主要諸元を表 1.2-5 に示す。
表 1.2-5
衛星数
衛星質量
ミッション寿命
軌道数
軌道高度
軌道傾斜角
周期
回帰日数
システム構築経緯
1.2.2.6
Iridium-NEXT 主要諸元
66
50 kg
15 年
11 (11 軌道面に各々6 機)
同一軌道上に 6 分間隔で衛星が並ぶ
780 km
86.4°
101 分
11 日
2007~2008 年 :システム仕様の決定
2009 年
:主契約業者の選定
(現状:Lockheed-Martin と Thales Alenia Space が競合)
2009~2012 年 :システム開発
2012~2014 年 :試験
2014 年~
:順次打上げ
ORBCOMM
衛星データ通信会社である ORBCOMM 社による、衛星通信サービスのためのコンステ
レーションプログラムであり、地上約 800km の軌道上の 30 機の低軌道周回衛星(LEO)
を利用したデータ通信サービスである。静止衛星に比べ、軌道高度が低いため、簡易・
小型な通信機・アンテナで通信が可能である。その他の機能としては、GPS レシーバー
による姿勢制御が可能であり、AIS (Automatic Identification System 船舶自動識別
システム)による、船舶の追跡、航行支援を行うことができる。
1991 年の打上げ開始以降、現在 29 機が運用中であり、今後順次打上げにより、既存
の衛星の代替刷新を行う。それに際し、Space X が 18 機の ORBCOMM 第二世代打上げ契
約を結んでおり、2010 年後半に打上げ開始予定である。この第二世代では M2M(機器
間)通信能力を現在の 12 倍に強化し、メッセージサイズの増大、AIS 検知能力も増強
される予定である。主要諸元を表 1.2-6 に示す。
14
表 1.2-6
衛星数
軌道面数
衛星質量
ミッション寿命
軌道高度
軌道傾斜角
周期
システム構築経緯
1.2.2.7
Orbcomm 主要諸元
35
5
41.7 kg
4年
800 km
45°(28 機)
108°(1機)
101 分
1991 年 7 月 17 日:打上げ開始
2008 年 6 月 19 日:6 機打上げ
(現在 29 機が運用中で、順次打上げにより、既存の衛星の
代替、刷新を行う)
O3b Networks
8 機を基本構成とした衛星コンステレーションによる、アジア、アフリカ、ラテンア
メリカ及び中東地域を中心とした発展途上国を対象とした低コストブロードバンドサ
ービスである。これは、先進国間には海底光ケーブルがあるが、途上国にはその敷設
が困難である点に注目した事業であり Google も出資を行っている。特徴としては、静
止軌道ではなく中軌道であることから、低遅延であり、旋回式アンテナによる地上局
へのデータ送信が可能である。軌道要素としては、O3b の 8 機が同一軌道上に等間隔に
ならび、288 分の周期で周回する。また、同一地上局から見て、45 分毎に次の衛星に
ハンドオーバーし、一日に 32 回、受信衛星を切り替えるシステムである。衛星の軌道
高度は 8063km と中軌道で軌道傾斜角が 0°であるため、サービスを行うことができる
領域は北緯 45°から南緯 45°に限定される。主要諸元を表 1.2-7 に示す。
表 1.2-7
衛星数
軌道面数
ミッション寿命
製造
軌道高度
軌道傾斜角
周期
システム構築経緯
O3b Networks 主要諸元
8 (最終的に 16 までの拡張を目指す)
1
10 年
Thales Alenia Space
8063 km
0°
288 分
2008 年:Thales Alenia Space と衛星製造契約を締結
2010 年:最初の 8 機を打上げ予定
15
1.2.2.8
COSMO-SkyMed
イタリア ASI とイタリア防衛省による、軍事目的の偵察と、民間用途の地球観測を
目的としたプログラムであり、重量 1700kg の衛星4機が同一軌道面に 90 度間隔で周
回し、地上から見た場合、最初の衛星通過後(通過する場合にはおおむね午前 6 時、
午後 6 時頃)6°西方を約 24 分後に次の衛星が通過するコンステレーションを構成す
る。主要用途は、偵察、地上構造物の把握や、自然災害による被害状況の把握であり、
天候を問わず観測できる。主要諸元を表 1.2-8 に示す。
表 1.2-8
衛星数
軌道面数
衛星質量
ミッション寿命
軌道高度
軌道傾斜角
赤道通過時刻
回帰日数
システム構築経緯
1.2.2.9
Cosmo-SkyMed 主要諸元
4
1
1700 kg
5年
619.6 km
97.86°
06:00 (降交点)、18:00 (昇交点)
16 日
2007 年 6 月 7 日 :1号機打上げ
2007 年 12 月 9 日 :2 号機打上げ
2008 年 10 月 24 日:3 号機打上げ
2010 年初頭に 1 機打上げ予定
RADARSAT Constellation
2014 年以降に打上げが予定されている Canadian Space Agency (CSA)による C-バン
ド SAR 衛星 3 機によるコンステレーションプロジェクトであり、流氷、風速の把握、
事故による石油汚染監視、船舶監視などの海洋調査や、被害軽減、警戒、応答、復興
対策などに用いる災害管理や、森林、農業、湿地のモニタリング、海岸変化抽出など
のエコシステムモニタリングが主な目的となっている。主要諸元を表 1.2-9 に示す。
表 1.2-9
衛星数
軌道面数
衛星質量
ミッション寿命
軌道高度
回帰日数
システム構築経緯
RADARSAT Constellation 主要諸元
3
1
1300 kg 以下
7年
600 km
12 日
2014 年:1 号機打上げ
2015 年:2 号機打上げ、2016 年:3 号機打上げ
16
1.2.3
フォーメーションフライト
1.2.3.1
全般
本調査研究においては、フォーメーションフライトとは、主に、複数の衛星が相対
的な位置関係を維持しつつ、単一衛星では実現できないサービスを提供する複数衛星
連携システムのことを指す。本定義に当てはまるフォーメーションフライトの一覧を
表 1.2-10 に示す。
表 1.2-10
フォーメーションフライト一覧
分野
プログラム名
国、運用機関
地球観測
TerraSAR-X
/TanDEM-X
独 DLR
地球観測
A-train
米 NASA
地球観測
Formosat-3/COSMIC
他
地球観測
地球観測
地球観測
地球観測
米大気科学大学連合
台湾 宇宙計画局
EO-1/Landsat
米 NASA
Cluster
欧 ESA
ERS-2、 Envisat
欧 ESA
Space Technology 5 米 NASA、 OSC
技術実証
実証試験
軍事衛星
軍事衛星
科学探査
科学探査
科学探査
科学探査
科学探査
System F6
Orbital Express
ESSAIM
ELISA
GRACE
LISA
DECIGO
XEUS
Darwin
米 DARPA
米 DARPA、NASA
仏国防省
仏国防省
米 NASA、独 DLR
欧 ESA、米 NASA
日 JAXA
欧 ESA
欧 ESA
主要用途、サービス内容 機
数
1/
地球観測(レーダ) /
高精度 DEM(数値標高モデ 1
ル)作成
大気、地表データの高精 6
度化
大気観測
6
観測データの精度向上
プラズマ三次元計測
高精度 DEM 作成
地球磁場観測衛星
2
4
2
3
複数衛星の利点検証
軌道上実証実験
通信傍受衛星
偵察監視衛星
高精度重力場測定
高精度重力場測定
高精度重力場測定
X 線宇宙観測衛星
惑星大気化学成分分析
2
4
4
2
3
3
2
7
注)OSC: Orbit Science Corporation、DLR:ドイツ航空宇宙センター
1.2.3.2
1.2.3.2.1
TerraSAR-X / TanDEM-X
概要
TerraSAR-X 及び TanDEM-X は、ドイツの DLR と EADS Astrium の官民協力プロジェク
トである。2007 年 6 月に TerraSAR-X が打ち上げられ、TanDEM-X は 2010 年に打上げ予
定となっている。主要用途としては、高精度 DEM 作成、地形、陸地表面、土木計画作
成とマッピング、環境モニタリングなどが挙げられている。
17
同一仕様の 2 機の衛星によるフォーメーションフライトであり、1km 以下の近距離で
飛行し、地上の同一エリアに対して、各々の衛星から測定することで、高精度の DEM
作成が可能となっている。これにより、全球、高精度 DEM データを提供し、マーケッ
トの先取りすることを狙っている。なお、ミッション機器は X バンド SAR である。な
お、高精度 DEM データ生成の実現とともに、Along-track InSAR(直列配置)による移動
体の速度抽出、Bistatic mode(送信衛星、受信衛星分離)の実証といった新規技術に
も取り組む予定である。
TerraSAR-X / TanDEM-X の主要諸元を表 1.2-11 に示す。なお、両衛星が採用してい
る HELIX 軌道とは、軌道が交わることを避けることで、衝突のリスクを低減する軌道
である。
表 1.2-11
衛星数
衛星質量
ミッション寿命
軌道数
軌道高度
軌道傾斜角
赤道交差時刻
回帰日数
システム構築経緯
1.2.3.3
TerraSAR-X/TanDEM-X の主要諸元
2
1230kg
5年
HELIX 軌道
514km(TerraSAR-X)
97.44°(TerraSAR-X)
06:00 (降交点)、18:00 (昇交点)
11 日
2007 年 6 月 15 日:TerraSAR-X 打上げ
2010 年上半期:TanDEM-X 打上げ予定
A-train
A-train は、高度 690kmの同一太陽同期軌道上に、7 機の衛星が非常に短い間隔でフ
ォーメーションフライトを行うプログラムである。7 機が数分間隔で並んで順番に観測
するため、気象・大気条件などの変化が少ない状況での観測が可能となる。そのため、
気候変動において重要なパラメータの解析精度の向上が期待できる。なお、7 機は、OCO、
Aqua、CloudSat、CALIPSO、PARASOL、Glory、AURA の順の予定であったが、OCO が打上
げ失敗に終わってしまっている。A-train の各衛星の詳細を表 1.2-12 に示す。
18
表 1.2-12
衛星
OCO
Aqua
CloudSat
CALIPSO
PARASOL
Glory
Aura
1.2.3.4
A-train の各衛星の詳細
目的
温室効果ガス観測
気温、湿度観測
レーダによる雲観測
雲・エアロゾル及び赤外放射輝度の観
測
Lidar による地球観測衛星
エアロゾル、ブラックカーボン量測定
オゾン層、大気の品質、気候パラメー
タの観測
打上げ日時
2009 年 2 月 24 日打上げ失敗
2002 年 3 月 4 日打上げ
2006 年 4 月 28 日打上げ
2006 年 4 月 28 日打上げ
2004 年 12 月 18 日打上げ
2010 年 10 月 1 日打上げ予定
2004 年 7 月 15 日打上げ
GRACE (Gravity Recovery and Climate Experiment)
Grace(Gravity Recovery and Climate Experiment)ミッションは、2 衛星のフォー
メーションフライトによる高精度重力場測定を目的とした NASA と DLR の共同プログラ
ムである。二つの衛星間の距離(数 100km)をマイクロ波で高い精度で測定し、互いの
衛星の速度変化を算出することで、空間的・時間的な重力変化を検出することを目指
している。GRACE の主要諸元を表 1.2-13 に示す。
表 1.2-13
衛星数
衛星質量
ミッション寿命
軌道高度
軌道傾斜角
周期
システム構築経緯
1.2.3.5
GRACE の主要諸元
2
432 kg
5年
485 km
89°
90 分
2007 年 3 月 17 日打上げ
LISA (Laser Interferometer Space Antenna )
LISA(Laser Interferometer Space Antenna)は、太陽の軌道上で重力波を検出し、
宇宙空間の歪みを検出することを目指したプロジェクトである。ESA と NASA による計
3 機の衛星により 1 辺が約 500 万 km の正三角形を形成し、Michelson 干渉計を使うこ
とで重力波を通過する時に発生する宇宙の歪みを測定する計画となっている。
また、将来の LISA プロジェクトに利用される要素技術を検証するために LISA
Pathfinder というプログラムが計画されている。機器の無重力下での動作の検証、レ
ーザ干渉の検証、レーザ・光学センサの信頼性検証などを目的としたプログラムであり、
L1 ラグランジュ点を周回する Heliocentric Orbit(ハロー軌道)上に投入する計画であ
る。LISA Pathfinder は、2010 年に打上げ予定である。
19
1.2.3.6
DECIGO
DECIGO は、0.1~10 Hz の周波数帯での重力波観測を通じ、宇宙誕生について解明す
ることを目指したプログラムである。重力波により衛星間の距離の変化がもたらされ
るため、互いに 1000km 離れた 3 機の衛星間の距離変化を測定することで重力波を観測
する。
現在は、JAXA の小型科学衛星シリーズの搭載ミッション候補の一つである。2012 年
に要素技術実証実験プログラムである DECIGO パスファインダー(小型衛星 1 機)によ
り、衛星 1 機の中に浮かぶ二つの鏡間の距離変化をレーザ干渉計で測定、2018 年に
Pre-DECIGO として、衛星 3 機、干渉計 1 機により重力波検出の実証をし、更に 2024 年
に DECIGO プログラムとして、衛星 3 機、干渉機 3 機により重力波天文観測を行うとい
う構想である。なお、レーザによる重力波観測では、レーザ距離(衛星間の距離)が
長いほど高精度に重力波を測定可能である。
1.2.3.7
System F6
System F6 は、米国 DARPA が推進しているプロジェクトであり、大型衛星一つが行う
役割を単機能小型衛星に分散させることで達成するプログラムである。単機能小型衛
星に分散させることにより、柔軟性、メンテナンス性、コスト低下、適用性及び冗長
性といった利点が発生すると説明されている。
1.2.3.8
ESSAIM
ESSAIM は、通信傍受、電磁環境分析、そして将来の電子偵察システムの実証試験を
目的としたプロジェクトである。4 機が各々2300km 離れ周回するフォーメーションフ
ライトであり、1 日に約 10 分の電磁放射線計測を 4 回行っている。
ESSAIM の主要諸元を表 1.2-14 に示す。
表 1.2-14
衛星数
衛星質量
製造
ミッション寿命
軌道数
軌道高度
軌道傾斜角
システム構築経緯
ESSAIM の主要諸元
4
120 kg
EADS Astrium
3年
二つの極軌道に 2 機ずつ
660 km
98.1°
2004 年 12 月 18 日:4 機同時に打上げ
20
1.2.3.9
ELISA
ELISA(ELectronic Intelligence by Satellite)は、将来の電磁偵察プログラムに
向けた試験衛星であり、ESSAIM の後継プロジェクトとの位置づけである。レーダ施設
の識別を行うことも目的としており、ミッション機器として、全球を正確に電磁的に
マッピングするレーダ送信機を搭載している。4 機が互いに数 km 間隔で隊列を組むフ
ォーメーションフライトであり、通信を傍受している。2010 年打上げ予定である。ELISA
の主要諸元を表 1.2-15 に示す。
表 1.2-15
衛星数
衛星質量
製造
ミッション寿命
軌道
軌道高度
システム構築経緯
1.2.4
ELISA の主要諸元
4
135 kg
EADS Astrium
5年
太陽同期回帰軌道
600~800 km
2010 年打上げ予定
動向の調査のまとめ
近年の傾向としては、2001 年に打ち上げられた 8t 級の Envisat 以降、プラットフォ
ーム型の大型地球観測衛星は姿を消しており、小型複数機によるコンステレーション
が流行し始めており、顕著な例として RapidEye、SAR-Lupe が挙げられる。また、SAR-Lupe、
COSMO-SkyMed のような偵察目的の SAR 衛星などにも、コンステレーションにより、観
測頻度を上げる傾向が見られている。また、TerraSAR-X/TanDEM-X のような SAR フォー
メーションフライトが新技術として注目されている。一方で、GeoEye、WorldView など
のように、単機による地上分解能(GSD)1m 未満の高分解能光学センサ衛星に対する需
要は、依然として存在する。
以上より、衛星プロジェクトのトータルコストを同じにした場合の、空間分解能、
撮像可能データ量、観測頻度、地上誤差について単機と複数機の長所、短所を検討し
たものを表 1.2-16 に示す。
21
表 1.2-16
大型単機、小型複数コンステレーション(例)比較
小型複数機
大型単機
機数
再訪期間
搭載機器
5 機以上
毎日(全体として)
マルチ
ストレージ
地上誤差
ダウンリンク
1 機の衛星重量
50 Gbits
CE = 200m
100 Mbps
200 kg 弱
1
10 日弱
パンクロ、マルチ、ハイパー、
(SAR)など複数搭載可
1000 Gbits
CE = 20m
500 Mbps
2000 kg
大型衛星は、高い空間分解能や広い観測幅、各種のセンサなどを搭載することがで
き、多種(光学/電波などの種類、周波数のスペクトラム)/大量のデータを記録し早
い速度で観測データを地上へ伝送することが可能である。一方、小型衛星の場合には、
センサの能力は限定される(周波数、種類、空間分解能及び観測幅などが制限される)
ものの、複数衛星を連携した場合には、頻度の高い観測が可能になる。また、技術開
発の進歩により、小型衛星へのデータ蓄積量が次第に増え、小型衛星へ搭載可能なセ
ンサも改善が進められている。小型衛星に搭載可能なセンサについては、観測幅の限
界もあるが、複数の衛星を連携させることによりトータルシステムとして広い観測幅
も実現することが可能である。
また、SAR のフォーメーションフライト(タンデム飛行)の単機に対する利点につい
て検討すると、解析技術の視点では表 1.2-17 に示す比較結果となり、タンデム観測モ
ードの視点では表 1.2-18 に示す比較結果となる。
22
表 1.2-17
SAR 単機、フォーメーションフライト(タンデム)比較(解析技術)
解析技術
単機
Cross-track
interferometry (3D 標
高の算出などに利用)
Return pass
同対象地域を撮像するために、
再訪(revisit)する必要があ
る。この間に大気中の水蒸気量
や電離層の状態が変位する。
Along-track
Interferometry(移動体
検出、速度算出などに利
用)
Digital Beamforming(観
測幅拡大)
Pol-InSAR(多重偏波に
よる、植生分布、含水率
などを、3次元への拡張
が可能)
高速 の移 動体の算出が可能で
ある。(対象例:自動車など)
表 1.2-18
フォーメーションフライト(タンデ
ム飛行)
Single pass
同時に画像を取得するため、干渉を
行う2画像間で前提条件に差がで
きるリスクが少ない。
Baseline 増大により、垂直方向の
分解能が向上する。
低速移動体の算出も可能である。
(対象例:海流の速度)
分解能を維持しつつ、観測幅を広域にすることができる。
Return pass
同対象地域を撮像するために、
再訪(revisit)する必要があ
る。この間に大気中の水蒸気量
や電離層の状態が変位する。
Single pass
同時に画像を取得するため、干渉を
行う2画像間で前提条件に差がで
きるリスクが少ない。
Baseline 増大により、垂直方向の
分解能が向上する。
SAR フォーメーションフライト(タンデム観測モード)単機に対する利点
観測モード
Monostatic mode
概要
2 機が Along-track 方向(同
一軌道の前後)に 30~50 km
離れて飛行
利用可能な技術
画像の差分抽出によ
る、変化量抽出
Along-track InSAR
Cross-track InSAR
Bistatic mode
2 機がほぼ横並びに飛行
1 機が送信したパルスを、2
機が受信
Bistatic SAR
Cross-track InSAR
Alternating
Bistatic Mode
2 機がほぼ横並びに飛行
1機が送信したパルスを、2
機が受信
パルス毎に2機が交互にパ
ルスを送信
Cross-track InSAR
単機に対する利点
Revisit するよりも、短い
時間における変化量抽出
や、低速移動体検出が可能
Bistatic mode で行う同期
が不要なので、InSAR によ
る DEM の高精度化が可能
都市域における多重散乱
の影響を少なくする
前方散乱波を受信するこ
とにより、S/N 比が高い画
像が得られる
InSAR を行う際に、同対象
地域を撮像するために、再
訪(revisit)する必要がな
い
衛星それぞれの持つ発振
器の位相誤差を補正する
ことが可能
以上の動向調査を踏まえて、複数衛星連携システムにおけるニーズ調査を次章以
降で検討する。
23
1.3
複数衛星連携システムのニーズ調査
災害監視、環境観測、安全監視、資源探査などの地球観測ミッションに関し、最新
動向を情報収集するとともに、本ミッションにおける、複数衛星連携システムに対す
るニーズを調査・分析し、代表的なニーズに対してミッション例を示した。
1.3.1
分野毎の特徴的ニーズ把握
1.3.1.1
ニーズ整理
環境分野、海洋監視、安全監視、災害監視分野における地球観測ミッションに対す
る複数衛星連携システムに対するニーズを表 1.3-1、表 1.3-2、表 1.3-3、表 1.3-4 にそ
れぞれ示す。
24
表 1.3-1 環境分野
コンステレー
ション
観測要求
目的
バイオ
マス測
定
ヒート
アイラ
ンド監
視
用途
自社が管理
している森
の伐採、植
林の管理
京都議定書
で規定され
ている、環
境負荷を埋
め合わせる
ための植林
活動の効果
測定
世界的な環
境保全や温
暖化対策の
研究
行政指導、
研究など
提供データ
測定対象におけ
るバイオマス量
を算出
(植生密度、LAI
など)
都市域のビルな
どから排出され
る熱量を観測
フォーメーションフライト
想定ユ
ーザ
データに対する
ニーズ
林業、製
紙業
1 ヶ月程
度
5m~20m
L バンド
SAR
一 般 企
業
多地域にわたる
小規模な森の育
林から伐採まで
の管理が容易で
ないため
生育状況の把握
が望ましい
低コストでの森
林管理を行う
1 ヶ月程
度
5m~20m
L バンド
SAR
○
大学、研
究所
高精度な植生デ
ータ
2 ヶ月程
度
1m~5m
○
L バンド
SAR
○
政 府 機
関、自治
体、研究
者
熱量の検出
1 日以下
20m( 都
市 1 ブロ
ック)
○
TIR ( 熱
赤外)
頻度
空間分
解能
25
全球観
測
即応
性
使用セ
ンサ
高頻度観測
○
Single path
高精度 DEM
3D
バイオ
マス
○
移動体
検出
表 1.3-2 海洋監視分野(船舶、海洋汚染監視)
コンス
テレー
ション
観測要求
目的
用途
提供データ
想定ユー
ザ
データに対する
ニーズ
頻度
海 洋
汚 染
監視
船 舶
監視
空間分解能
汚染状況の把握
海への石油
流出
海洋関係、 油汚染の高頻度
政府機関
検出
1 日に 1 回
5m~20m
海上船舶の種類
識別
船舶の識別
政府機関
広範囲の海洋を
高頻度で監視
1 日に 1 回
以上
海上の船舶位置
の把握
船舶位置
広範囲の海洋を
高頻度で監視
1 日に 1 回
以上
船舶航行の把握
船舶の速度
抽出
船舶航行の把握
航跡から速
度、進行方向
の抽出
漂流荷船の
探索
嵐などで行方不
明に漂流荷船を
探索する
広範囲の海洋に
おいて、船舶の
速度を検出する
広範囲の海洋を
高頻度で監視
航跡を検出する
海洋関係、 特定領域におい
政府機関
て、荷船の探索、
識別を行う
全球
観測
使用センサ
高頻度
観測
○
C、L バンド SAR
○
1m 以下(0.5 程
度が望ましい)
○
X バンド SAR
○
1m~5m
○
C、L バンド SAR
○
1m 以下
○
○
1 日に 1 回
以上
1m~5m
○
光学センサ
(パンクロマ
チック、可視近
赤外マルチバ
ンド)
C、L バンド SAR
1 日に 1 回
以上
1m~5m
○
C、L バンド SAR
数日に 1 回
程度
1m~5m
○
X バンド SAR
26
○
即応
性
○
フォーメーションフライト
Single path
高精度 DEM
3D
バイ
オマ
ス
移動
体検
出
○
○
表 1.3-3 安全保障分野
コンス
テレー
ション
観測要求
目的
用途
提供データ
想定ユ
ーザ
データに対する
ニーズ
即応
性
使用センサ
1m~5m
○
L バンド SAR
1m 以下
○
光学センサ
(パンクロ
マチック)
○
可能な限
り高頻度
が望まし
い
1m 以下
○
X バンド SAR
○
月に 1 回
1m~5m
○
X バンド SAR
1 日に 1
回
5m~20m
○
C バンド SAR
頻度
偵察
森林などで隠
された人工構
造物などの把
握
危機的状況の
早期発見、危
機管理面での
指揮官のサポ
ート
森林の下に
隠れている
構造体、対
象の検出
高分解能の
モノクロ画
像
政 府 機
関
森林を 3 次元で構
造解析が可能
政 府 機
関
地形情報
政 府 機
関
特定地域を高頻
度高分解能で監
視。視認しやすい
光学衛星が望ま
しい
特定地域を高頻
度高分解能で監
視。
天候に影響され
ない
広範囲の DEM を作
成
土 地 湿 潤
度、ラフネ
スデータ
政 府 機
関
ラフネス、湿潤度
の把握
高 分 解 能
SAR 画像
飛行機、ヘリ
が飛行に使用
する起伏デー
タ
オフロードで
の移動ルート
決定
可能な限
り高頻度
が望まし
い
可能な限
り高頻度
が望まし
い
空間分解
能
27
全球
観測
高頻度
観測
フォーメーションフライト
(タンデム飛行)
Single path
高精度 DEM
3D
バイオマス
○
○
Cross-track
InSAR
○
移動
体検
出
表 1.3-4 災害監視分野(洪水、被害把握、火災、火山噴火)
コンス
テレー
ション
観測要求
目的
用途
提供データ
想定ユー
ザ
データに対
するニーズ
頻度
洪水被害マ
ッピング
救助計画、復興行政
など
冠水エリアの抽
出
災害で破壊
されたエリ
アの把握
災害時に早急に被害
状況を把握すること
復興行政など
高精度光学画像
政 府 機
関、自治
体
政 府 機
関、自治
体
空間分解
能
全球観
測
即応
性
高頻度
1 日に 1 回
以上
5m~20m
○
C、L バンド
SAR
○
高分解能画
像、高頻度
1 日に 1 回
1m 以下
○
○
1 日に 1 回
1m 以下
○
光学センサ
(可視近赤外
マルチ)
X バンド SAR
標高変化量
抽出
1 週間に 1
回程度
5m~20m
○
L バンド SAR
火災エリア
の抽出
1 日に 1 回
20m
○
○
光学センサ
(短波長・熱
赤外画像)
光学センサ
(可視近赤外
マルチ)
光学センサ
(可視近赤外
マルチ)
熱赤外
ステレオ視
TIR
地すべり
被害把握、復興行政
高解像度 SAR 画
像
標高差分抽出
森林火災
森林火災の火災領域
モニタリング
短波長赤外、熱
赤外画像
バイオマス量の変化
から、火災の範囲を
抽出
火山噴火、溶岩の噴
出の監視
可視近赤外画像
バイオマス
変化量
1 日に 1 回
5m~20m
○
○
可視近赤外画像
熱源地域の
抽出
1 日に 1 回
5m~20m
○
○
火山噴火による火山
灰を運行中の飛行機
が避ける際に用いる
熱赤外画像(ス
テレオ視による
高さ情報を含
む)
3 次元熱赤
外情報
1 日に 1 回
100m
○
○
火山噴火
火山灰の 3
次元情報
政 府 機
関、自治
体
政 府 機
関、自治
体
航空会社
使用センサ
高頻度
観測
28
○
○
○
○
○
フォーメーションフライト
(タンデム飛行)
Single path
高精度 DEM
3D
バイ
オマ
ス
移動
体検
出
第 2 章
2.1
複数衛星連携システムの有効性分析
概要
本章では複数衛星連携システムの有効性を、種々のミッションが要求する性能・機能
及びコストの観点から分析する。
複数衛星連携システムの実現が待たれる背景には、
① 災害観測、環境観測、安全監視、資源探索などのための地球観測衛星に対する需
要の増加
② 観測取得情報に対する高分解能化、高性能化、多次元化、高頻度化の要求の向上
③ 衛星大型化に伴うリスクの分散
がある。
とりわけ①の災害観測や安全監視については、その性格上、観測の高頻度化及びデー
タ取得・提供に関する即応性が強く求められる。複数衛星群によるコンステレーション
はその要求に良く応えられるものと期待される。また②に対応するものとして、複数衛
星によるフォーメーションフライトにより干渉計を構成して地理空間情報精度の飛躍
的向上、変位/移動体速度の検知などの情報の多元化を図る可能性も考えられる。図
2.1-1 に複数衛星連携システムがもたらす優位性について示す。
【コンステレーション・フォーメーションの優位性】
主な利用分野
災害監視
海洋監視
災害監視
安全保障
広域観測
コンステレーション
全天球サービス
土地環境
海洋監視
衛星通信
船舶航行管理
航法サービス
冗長性・
冗長性
リスク低減
土地環境
安全保障
フォーメーション
海洋監視
安全保障
変化抽出
災害監視
安全保障
観測幅拡大
災害監視
安全保障
図 2.1-1 複数衛星連携システム(フォーメーション、コンステレーション)の優位性
29
2.2
コンステレーション衛星システムの有効性分析
コンステレーション衛星システムについて、観測頻度、観測品質、観測区域の網羅性、
データ取得即応性の観点で、有効性を分析した。
2.2.1
観測頻度の向上
衛星群を用いることで地球上のあらゆる地点の観測頻度を上げることができる。衛星
数が N 倍になれば、ある箇所を撮影する機会も N 倍となる。ここでは、衛星数とある地
点の観測頻度に関してシミュレーションによる分析を実施した。
2.2.1.1
シミュレーションによる評価
今、極軌道に N 個の衛星を配置したとして、緯度 0 度、30 度、60 度に設定したター
ゲットをどれだけ観測する機会があるのかを計算する。
2.2.1.1.1
シミュレーション条件
前提とする条件を表 2.2-1、図 2.2-1 に示す。
表 2.2-1 観測頻度向上評価のためのシミュレーション条件
軌道高度
500km
軌道傾斜角
97 度 (太陽同期軌道、地上が照らされる条件を一定とする
ため)
降交点
10:30 (過去の観測衛星データとの整合性を取るため)
衛星数
1-12 機
真近点離角
30 度間隔 (12 機を同一軌道上に均等配置) (12 機以下の場
合でも、偏ってしまうが 30 度間隔で配置)
観測衛星オフナディア角
45 度 (ASNARO 仕様) (地上からみた仰角 40 度)
離心率
0 (円軌道)
観測ターゲット
標準時線上(東経 0 度) 北緯 0、30、60、90 度の 4 箇所
シミュレーション時間
1 ヶ月 (29 日)
その他の条件
太陽光がターゲットに当たっているときのみ観測可能
(昼間のみ観測可能)
30
太陽同期軌道 (i=97deg)
北緯 90 度のターゲット
北緯 60 度のターゲット
北緯 30 度のターゲット
位相間隔 30 度
北緯 0 度のターゲット
図 2.2-1 シミュレーションにおける衛星とターゲットの関係
2.2.1.1.2
シミュレーション結果
図 2.2-2 に、各ターゲット緯度に応じて、1 ヶ月間の観測頻度の推移をグラフに示し
た。ターゲットの位置と衛星のタイミングで、多少の凹凸はあるものの、観測頻度は単
純に衛星数に比例する形となった。
軌道傾斜角がすべて同じでかつ降交点を一致させた場合、確かに衛星数に比例する観
測数になるといえる。
観測対象緯度と、衛星数に応じた1ヶ月間の観測数の推移
29日間の観測回数
250
200
150
0
30
60
100
50
0
0
2
4
6
衛星数
8
図 2.2-2 衛星数に応じた観測回数の変化
31
10
12
ただし、降交点赤経を統一したことで、ターゲットが観測される時間帯に偏りがでて
いる。よって、降交点赤経にある程度幅を持たせ、観測される時間帯を分散することも
ミッションによっては必要となる。
2.2.2
観測品質の向上
観測頻度を固定した場合、衛星数が増えるにつれて観測品質 (画像分解能や、撮影対
象への観測入射角) が向上する。
2.2.2.1
入射角/分解能の改善
まず、撮影対象への観測入射角の改善について述べる。一般的に、入射角が大きくな
ってしまうと、山地や建物の影になって観測できない箇所が増えしまうため、入射角は
小さいほうが望ましい。
今、ある地点の観測頻度を 1 回/1 日と固定した場合、衛星数が少なければ少ないほど、
1 衛星あたりの観測担当範囲は広くなってしまう。そのため、オフナディア角を大きく
とって遠方まで撮影する必要が生じ、結果的に入射角も大きくなってしまう(図 2.2-3 参
照)。一方で、衛星数が多いとき、衛星 1 機当たりが撮影しなければならない領域が減る
ため、入射角も小さくなる(図 2.2-4 参照)。
オフナディア角
天頂方向
入射角
地表
観測点
図 2.2-3 衛星からのオフナディア角と入射角の関係
32
オフナディア角
入射角改善
図 2.2-4 複数衛星による撮影画像入射角の改善
そして、分解能に関しても同様である。入射角が大きくなると、衛星は地表を斜めか
ら観測することになり、その入射角の分だけ地表分解能が劣化する(クロストラック方向
の分解能が劣化し、軌道方向の分解能は変わらない)。また、入射角が大きい場合、観測
対象までの距離が伸びることでも分解能が悪化する。
2.2.2.2
1 日 1 回地球任意地点観測時の分解能/入射角シミュレーション
1 日に 1 回、地球上の任意の地点を必ず観測するとして、衛星数と以下のパラメータ
との関係を求めた。なお、高度は固定(500km、 700km)している。
z
オフナディア角: 衛星仕様 (姿勢変化速度、姿勢傾きの限界) による
z
観測点入射角: 撮影画像の質に影響
z
分解能 (観測可能区域端での): 撮影画像の質に影響
前提となる衛星は ASNARO であり、高度 500km における直下点分解能は 50cm とした。
もっとも観測頻度が低くなる赤道上空において評価を行った。
33
2.2.2.2.1
衛星数と必要オフナディア角/観測入射角の関係
図 2.2-5 は衛星数とオフナディア角/入射角との関係を表している。図から、衛星数
が増えるにつれオフナディア角、入射角が小さくなっていることがわかる。これは衛星
仕様に対する緩和と画像品質の向上を意味している。
この関係から、1 日に 1 回は地球上の任意の地点が観測できるという条件の下、オフ
ナディア角/入射角、衛星数、軌道高度との関係を把握することができ、システム設計
に活用できる。
衛星数と、オフナディア角/入射角の関係
Off-Nadia角(500km)
80
入射角(500km)
オフナディア角/入射角
70
Off-Nadia角(700km)
入射角(700km)
60
50
40
30
20
10
0
0
1
2
3
4
5
衛星数
6
7
8
9
10
図 2.2-5 衛星数と必要オフナディア角/観測入射角の関係
2.2.2.2.2
衛星数と分解能の関係
入射角が大きくなると、衛星は地表を斜めから観測することになり、(軌道垂直方向
の)地表分解能が劣化する(軌道方向の分解能は変わらない)。
前項と同様、1 日に 1 回は地球上の任意の地点が観測できるという条件のもと、分解
能と衛星数、軌道高度(極軌道)との関係を導いた。
図 2.2-6 からは、衛星数が増すにつれて、高度に関わらず分解能が改善していること
がわかる。分解能の改善は衛星数が 4、 5 機になるあたりからほぼ横ばいであるため、
分解能をある程度達成した上でなるべくコストを下げたコンステレーションを実現す
るためには、衛星数 4、5 機が妥当であると考えられる。
34
観測可能域端での分解能
6
分解能(m)(500km)
分解能(m)(700km)
5
分解能 (m)
4
3
2
1
0
0
1
2
3
4
5
衛星数
6
7
8
9
10
図 2.2-6 衛星数と画像分解能との関係
2.2.3
シミュレーション: 日本上空での観測区域と衛星数の関係
地上入射角 30 度を保障した場合、高度 500km の太陽同期軌道上の衛星の数に応じて 1
日でどれだけの地域を観測できるのかシミュレーションを行った。シミュレーション例
を図 2.2-7、図 2.2-8 に示す。
衛星が 5 機ある場合、入射角が 30 度しか必要でない場合は観測領域が重複する箇所
も出てくるためオーバースペックである。ただし赤道付近では衛星数 5 機はちょうど全
体を網羅できる機数である(図 2.2-9 参照)。
オフナディア角 45 度まで(ASNARO 仕様)観測するとより広範囲を観測できる。衛星 2
機で日本周辺をほぼ網羅できてしまう。衛星が 3 機あれば日本周辺及び赤道上空も網羅
できる(図 2.2-10 参照)。
35
図 2.2-7 衛星 1 機 (入射角 30 度以下、日本周辺)
図 2.2-8 衛星 2 機 (入射角 30 度以下、日本周辺)
36
図 2.2-9 衛星 5 機 (入射角 30 度以下、日本周辺)
図 2.2-10 衛星 3 機 (オフナディア角 45 度以下、インドネシア周辺)
37
2.2.4
データ取得即応性の向上
2.2.1 では衛星群を用いることで観測頻度が向上することが示された。ここでは更に、
データ取得即応性という観点に着目する。データ取得即応性とは、ある任意の地点に対
する撮影要求が発生してから、実際に衛星が観測した撮像データを地上局にダウンリン
クするまで(正確にはユーザに届くまで)に要する時間の即応性を意味する、撮影要求
から撮像データ取得までは、以下のシーケンスに分けられる。
【要求発生】→【衛星へのコマンドリンク】→【撮影】→【撮像データのダウンリンク】
2.2.1 で述べた衛星群による観測機会の増加は【衛星へのコマンドリンク】から【撮影】
までの時間の短縮を意味する。また、当然のことであるが、衛星数が増えることにより、
衛星と地上局のアクセスチャンスも増加する。これは【要求発生】から【衛星へのコマ
ンドリンク】までの時間と【撮影】から【撮像データのダウンリンク】までの時間の短
縮を意味する。衛星数増加とデータ取得即応性についての具体的な軌道に基づいた定量
的な解析は 4.2.2 で述べる。
さらに衛星群の間でコマンドや撮像データの衛星間通信を行えば、データ取得即応性
はより向上する。衛星間通信も含めた要求発生からデータ取得までの概念図を図 2.2-11
に示す。
撮影
撮像データ
衛星間通信
コマンド
衛星間通信
Downlink
Uplink
データ取得
撮影要求
図 2.2-11 衛星間通信によるデータ取得即応性の向上
38
2.3
フォーメーションフライト衛星システムの有効性分析
2.3.1
複数化・連携に着目した有効性分析
本節では、複数衛星システムの「複数化」「連携」に着目して、「単機」「非連携」
の場合と比較してどのような有効性が期待できるかについて考える。表 2.3-1 は、フォ
ーメーションフライト衛星システムの一次的な有効性分析結果を整理したものである。
ここで最右端列は、表 2.3-2 で定義する利用法による分類(分類 II)におけるカテゴリ
名(Type A、B、C)を記述している。
これより、有効性の源泉となる機能と、利用法から見た分類 II とは強い相関がある
ことがわかる。またミッションの数の多さからもわかるように、フォーメーションフラ
イト衛星システムの第一の有効性は、空間的な距離を隔てることにある。その場合の衛
星機数は 2~4 機程度である。
表 2.3-1 フォーメーションフライト衛星システムの一次的な有効性分析
ミッション例における(
39
)内の数字は衛星機数を表す
表 2.3-2 利用法による分類
第二の有効性は、機器の組合せ、あるいは分散にある。その場合の機数は、先の空間
的な距離を隔てる場合と比べてかなり多い。空間的な距離を隔てる場合のフォーメーシ
ョンフライトのミッション形態はこれまでかなり検討されてきたが、機器の組合せ、あ
るいは分散する場合のミッション形態は、これから検討が進む分野である。
フォーメーションフライト衛星システムの副次的な有効性は、複数化に伴い衛星が単
機能化し、その結果小型化することである。この単機能化、小型化がもたらす利点につ
いて以下に列挙する。なおここに列挙した利点の大部分は、フォーメーションフライト
とコンステレーションの両方に共通するものである。
z
リスク分散:故障したときに全損にならない。
z
量産化:太陽発電衛星システムのように同じ衛星を多数必要とする場合にメリッ
トが大きい。
z
段階的なシステム構築:A-Train のように核となる衛星のまわりに少しずつ小型
の単機能衛星を投入していくことでシステムアップが可能。
z
まとめ打上げ:小型であれば同時に複数の衛星をまとめて同じところに投入可能。
z
打上げ機会の増大:小型であれば打上げ手段の選択肢が広がる。
ただし、フォーメーションフライト、あるいはコンステレーションによる「複数化」
のメリットは、衛星の機数が増えることに伴うコスト増を補うだけの一次的な有効性
(複数化しないとミッションが達成できない)、あるいは副次的な有効性(量産化によ
り全体コストの増分を抑制できる)があって初めて享受できるものである。これは、複
数衛星システムをプロジェクト化するために先ず解決すべき課題となっている。
40
2.3.2
SAR センサによるフォーメーションフライト衛星システムの有効性分析
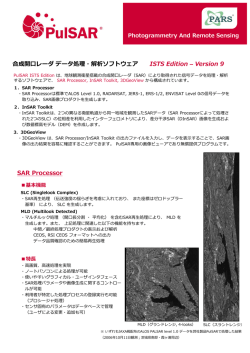
2.3.2.1
概要
SAR センサによるフォーメーションフライト衛星システムの有効性の概要を図 2.3-1
に示す。図では、SAR センサを用いてフォーメーションフライト衛星を形成した場合の
効果を 5 項目列挙し、それぞれの利用方法(ユーザ提供)を示している。
図 2.3-1
SAR センサによるフォーメーションフライト衛星システムの有効性の概要
図 2.3-1 に示す項目の中で、InSAR 方式による高精度地形計測、SAR-MTI 方式による低
速度の移動目標検出、高分解能化について、詳細検討を実施した。
41
2.3.2.2
2.3.2.2.1
InSAR 方式による高精度地形計測
概要
フォーメーションフライト衛星システムを用いた InSAR(Interferometric SAR)方式
では、図 2.3-2 に示すように衛星間距離を拡大できるため、地形計測精度が向上し、高
度情報を含めた高度地図の提供が可能となる。
図 2.3-2 フォーメーションフライト衛星システムを用いた InSAR(Interferometric SAR)方
式概念図
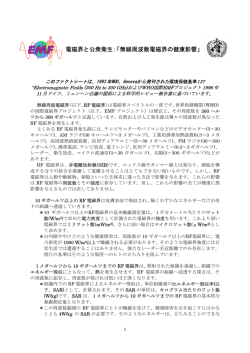
2.3.2.2.2
ベースライン長と計測精度の関係
InSAR 方式による高精度化において、衛星間距離の関係(ベースライン長)は、重要
なパラメータである。InSAR 方式におけるベースライン長の概念図を図 2.3-3 に示す。
ベースライン長が長い方が高度測定誤差は小さくなる。ただし、干渉性(コヒーレン
ス)の低下を招くため、上限値がある。また、位相アンラップが困難になり、大域的な
地形の観測が困難になる。そこで、3 機以上の衛星を用いて、ベースライン長が異なる
観測を組み合せることにより、高精度で、より広域の地形を観測できる。
送信周波数については、周波数が高いほど高度誤差は小さくなる。ただし、観測の同
時性への要求が厳しくなる。
42
図 2.3-3 ベースライン長概念図
2.3.2.2.3
ベースライン長に対する要求
前項で示したようにベースライン長を拡大することによって、高度計測精度は向上す
る。ただし、ベースライン長を拡大しすぎると、干渉性(コヒーレンス)の低下を招き、
高度計測精度に影響を与える。
2.3.2.2.4
衛星数と高度測定精度の関係
3 機以上の複数フォーメーションフライト衛星システムによる InSAR では、同時に複
数のインタフェログラムが取得可能である。これを組み合わせることで、S/N 改善によ
りコヒーレンスが改善し、地形計測精度が向上する。
43
2.3.2.3
2.3.2.3.1
移動目標検出・速度推定
概要
複数の衛星を用いた SAR-MTI(Moving Target Indication)方式により、クロストラッ
ク方向の速度が推定可能である(図 2.3-4 参照)。ベースライン長を広げることによっ
て、低速目標の検出・速度推定が可能となる。ただし、衛星 2 機では検出できない速度
(ブラインド速度)が発生するため、3 機以上が必要となってくる。また、複数の衛星
を用いることで、アロングトラック方向の速度推定が可能になるため、目標の速度ベク
トル推定が可能になる。
図 2.3-4 速度推定概念図
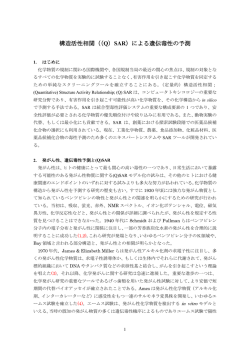
2.3.2.3.2
ベースライン長と検出可能最小速度の関係
衛星 A と衛星 B で観測時間をずらすことによって、同じ画像(画像 A と画像 B)を 2
回観測して、差分画像を取得する。差分画像では、静止している背景(クラッタ)から
の信号は変化しないため抑圧され、移動目標の信号は位相が変化することで、検出可能
となる。本方式は、SAR-MTI(Moving Target Indicator)と呼ばれる(図 2.3-5 参照)。
44
図 2.3-5
SAR-MTI 概念図
ベースライン長を変えた場合の MTI のクラッタ抑圧特性は以下の通り。(図 2.3-6 参
照)
z
MTI は、静止目標の信号を抑圧するフィルタであるため、速度 0 の目標の信号を
抑圧する。
z
低速移動目標の信号も減衰してしまう。クラッタ環境下では、その影響で検出可
能最低速度が決まってしまう。
z
ベースライン長を長くすると、低速移動目標の抑圧率が低減できることがわかる。
z
ベースライン長を長くすると、ブラインド速度が発生する副作用が生じる。
図 2.3-6 ベースライン長を変えた場合(ベースライン長 3m と 10m)の
MTI のクラッタ抑圧特性例(X 帯)
45
2.3.2.3.3
ブラインド速度の低減
前項で示したように、ベースライン長を長くすると、検出可能最小速度は向上する。
ただし、観測時間の差が長いと、位相成分が大きくなり、位相の折り返しが生じる。結
果として、位相成分が n×2π毎(n は整数)に、位相差 0(静止)との区別がつかずに、
検出できない速度が生じる。この位相に相当する目標の速度をブラインド速度と呼ぶ
(図 2.3-7 参照)。
図 2.3-7 速度と位相変化
上記のブラインド速度の発生に対して、衛星数を増加することで、ブラインド速度に
おける目標信号抑圧率を低減できる。
2.3.2.3.4
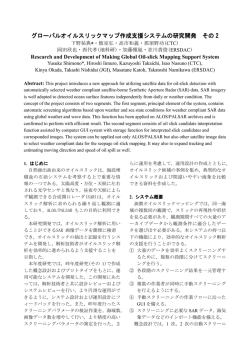
高分解能化
SAR のアジマス分解能は合成開口長によって決まる。合成開口長は、アンテナサイズ、
送信電力、要求される観測幅などによって決定される。合成開口長を長くするためには、
一般には小さなアンテナが必要であるが、S/N を維持するためにある程度の大きさが必
要である。小型衛星を複数によるフォーメーションフライト化することにより、各衛星
で達成可能な合成開口長を延長できるため、各衛星のアンテナを小型化することなく、
S/N を維持した上で衛星数分の分解能向上が可能である(図 2.3-8 参照)。
46
図 2.3-8 フォーメーションフライトによる高分解能化の概念図
47
第 3 章
3.1
実現技術の分析
概要
複数衛星連携システム(複数衛星のコンステレーション、フォーメーションフライト)
を実現するために必要な技術要素を表 3.1-1 に示す。
表 3.1-1 複数衛星連携システムを実現するに必要な技術要素
連携方式
必
要
技
術
要
素
・衛星-地上間大容量通信
共通
・衛星間通信(ISL:Inter-Satellite Link)
・最適、最速ネットワーク網の構成(衛星-地上、衛星間)
・複数衛星同時運用技術
・衛星の自律化向上、地上系の自動化/省力化
コンステレ ・状況に応じた最適軌道上配置の実現
ーション
・フォーメーションフライト構成/再構成及び衝突回避のための誘
誘導
導アルゴリズム
・衛星間(疎・精測)計測手段(RF ベース、光学ベース、レーザ
ベース、干渉計ベース)
フォーメー
ションフラ
イト
・制御アーキテクチャ(分散制御 vs 集中制御)
制御
・精密アクチュエータ(低振動ホイール、コールドガス、電気推進
系など)
その他
・相対運動を模擬するシミュレーション技術
これらのうち、通信技術(衛星-地上間、衛星間)については 3.2 で、またフォーメ
ーションフライトに必要な技術全般については 3.3 で詳細に分析・検討される。
48
3.2
通信技術の調査検討
ここでは複数衛星連携システムにおける通信技術について述べる。まずは既存の衛星
コンステレーションやフォーメーションフライトにおいて用いられている通信技術を
紹介する。次に特に衛星間通信技術に着目し、低軌道(LEO)間の衛星間通信、静止軌道
(GEO)上のデータ中継衛星、そして次世代技術である光衛星間通信について報告する。
3.2.1
既存の複数衛星連携システムの通信技術調査
3.2.1.1
衛星コンステレーションにおける通信技術
主要な通信衛星コンステレーションの通信諸元及び地球観測衛星コンステレーショ
ンの通信諸元を、表 3.2-1、表 3.2-2 に示す。
3.2.1.2
フォーメーションフライトにおける既存システムの通信技術
既存のフォーメーションフライトにおける通信技術として、TerraSar-X / TanDEM-X
を挙げる。
TerraSar-X
2007 年に打ち上げられた、地形、陸地表面、土木計画作成とマッピング、DEM 作
成、環境モニタリングなどを目的とした X 帯 SAR 衛星である。
また TerraSar-X では、X 帯 SAR の他に、Laser communication Terminal (LCT)を
使った光通信ミッションを行う。LCT 実験は、別の軌道の衛星と高データレートで
光通信を行うものであり、その対象衛星はアメリカのミサイル防衛機関衛星 NFIRE
であり、5.625Gbps の光通信を目的としている。
TanDEM-X
TerraSar-X と同仕様の衛星で、フォーメーションフライトにより、バイスタティ
ック SAR 観測を行い、高精度の DEM を作成する。フォーメーションフライトにお
いて、TerraSar-X と衛星間通信を行い、TerraSar-X の位置と速度情報を S 帯テレ
メトリとして受信する。
49
表 3.2-1 通信衛星コンステレーション 通信諸元一覧
衛星名
衛星基数 衛星間通信
データレート
周波数
帯域
変調方式
User←→衛星 up,down link
1616~1626.5[MHz]
Iridium
ORBCOMM
global star
66
29
48
有
衛星間通信
25[Mbps]
衛星間通信
22.55~23.55[GHz]
衛星←→ゲートウェイ
up-link
29.1~29.3[GHz]
down-link
19.4~19.6[GHz]
衛星間通信
1[GHz]
User~衛星 up,down link
10.5[MHz]
ゲートウェイ→衛星
148~149.9[MHz]
ゲートウェイ→衛星
1.9[MHz]
衛星→User
4.8[Kbps]
衛星→User
137~138[MHz]
衛星→User
1[MHz]
User→衛星
2.4[Kbps]
User→衛星
148~149.9[MHz]
User→衛星
1.9[MHz]
衛星→ゲートウェイ
57.6[Kbps]
衛星→ゲートウェイ
137~138[MHz]
衛星→ゲートウェイ
1[MHz]
衛星→User
2.4835~2.5 [GHz]
衛星→User
16.5 [MHz]
衛星→ゲートウェイ
6.875~7.055[GHz]
衛星→ゲートウェイ
180[MHz]
User→衛星
1.61~1.6265 [GHz]
User→衛星
26.5[MHz]
ゲートウェイ→衛星
5.091~5.250[GHz]
ゲートウェイ→衛星
159[MHz]
無
無
アンテナ
TDMA
フレーム 90[ms]
バーストデータレート 50[kbps]
音声 4800[bps]
データ channels 2400[bps]
フェーズドアレイアンテナ
3台/基
FDMA
240 channels (41.67[kHz])
ゲートウェイ→衛星
57.6[Kbps]
User端末←→衛星
9.6[Kbps]
QPSK
多重化方式
50
OQPSK
FDMA
―
QPSK
CDMA
―
表 3.2-2 地球観測衛星コンステレーション
通信諸元一覧
衛星名
衛星基数
衛星間通信
データレート
キャリア周波数
帯域
RapidEye
5
無
X-band 60[Mbps}
X-band 8212.5[MHz]
X-band 375[MHz]
up-link(コマンド)
4 [kbps]
up-link(コマンド)
2053.458 [MHz]
up-link(コマンド)
1.2 [MHz]
down-link(テレメトリ)
16, 128, 512 [kbps]
down-link(テレメトリ)
2230 [MHz]
down-link(テレメトリ)
4 [MHz]
down-link(観測データ)
チャンネル1 105 [Mbps]
チャンネル2 105 [Mbps]
down-link(観測データ)
チャンネル1 8105 [MHz]
チャンネル2 8230 [MHz]
down-link(観測データ)
チャンネル1 101.23 [MHz]
チャンネル2 101.23 [MHz]
―
―
―
RADAR SAT 2
SAR-Lupe
1
(次期ミッション
RADARSAT-Cで
3基コンステレーションを予
定)
無
5
有
(2.2GHz)
51
変調方式 多重化方式
QPSK
無
アンテナ
isoflux antenna
S-band
オムニアンテナ
QPSK
無
BPSK
―
X-band
cardioid or isoflux
antenna
―
3.2.2
衛星間通信技術
衛星コンステレーションにおいては、地上局からのコマンドやミッションデータの衛
星間通信を行うことでデータの取得即応性を向上させることができる。これは、災害監
視衛星、偵察衛星、通信衛星などに応用できる。また、フォーメーションフライトにお
いては、高い精度で相対位置関係を保持することを必要とするが、衛星同士の位置情報
の把握に衛星間通信が利用できる。
3.2.2.1
3.2.2.1.1
LEO~LEO 間衛星間通信
多数機衛星間通信事例
データ取得即応性という観点に着目した場合、衛星数が多い程、当然ながら即応性は
向上する。既存のシステムとして数十機の衛星で衛星間通信を行い数秒レベルの即応性
を可能にしているものがあり、通信衛星コンステレーションはこれに該当する。実証例
として Iridium がある。
3.2.2.1.2
少数機衛星間通信事例
少数機の衛星群で衛星間通信を行うことで、数時間のデータ即応性を持つシステムが
ある。その実証例に SAR-LUPE がある。
3.2.2.2
静止軌道データ中継衛星の調査
衛星間通信によりデータ取得即応性を上げるには、LEO~LEO 間の衛星間通信の他に、
静止軌道上のデータ中継衛星を利用する方法がある。
3.2.2.3
3.2.2.3.1
光衛星間通信
光衛星間通信の特徴
衛星間通信の通信方式として電波以外に光通信が注目を集めている。RF と光通信との
比較を表 3.2-3 に示す。
3.2.2.3.2
光衛星間通信の技術動向
TerraSAR-X では、従来の強度変調方式(IM-DD)からコヒーレント光通信方式に変えた
ことで、5.6 Gbps の高データレートの通信を可能としている。また、搭載光通信機器の
小型化、軽量化も進んでいる。
52
表 3.2-3
比較項目
RF
RF 通信と光通信との比較
光
補足
RF の場合、Gbps クラスの伝送は電波の必要帯域が広くな
データレート
△
○
り実現が難しいが、光の場合 Gbps 以上の伝送は地上で実
現されている技術で将来も高速化可能。
RF の場合、指向性を高めようとするとアンテナが大きく
機器サイズ
△
○
なるが、光はビームの指向性が良くアンテナも小さいの
で装置も小さくなる。
消費電力
△
○
技術リスク
○
△
RF の場合、大口径アンテナの駆動に電力が必要、一方光
のアンテナは小さく電力も比較的小さい。
RF の場合、ビームの拡がりが大きく指向は容易、光の場
合μrad オーダの高精度な指向が必要。
53
3.3
軌道/姿勢制御技術の調査及び制御方式の検討
本節では、複数衛星システム、特にフォーメーションフライトにおける軌道/姿勢制御
技術について調査した結果を述べる。
3.3.1
種々のフォーメーションフライト軌道
フォーメーションフライトでは衛星間の相対位置関係が重要であり、その表現に適し
た座標系を導入することで相対位置関係の把握が容易となる。この直交座標系(Hill 座
標系)を構成する 3 軸方向を次のように定める(図 3.3-1)。
x 軸:地球中心から主宇宙機質量中心に向かう方向
z 軸:主宇宙機の軌道面に垂直な方向(軌道運動による角運動量方向)
y 軸:x 軸、z 軸と右手系をなす方向
図 3.3-1
Hill 座標系の定義
主宇宙機に対する従宇宙機の相対位置を Hill 座標系で [x
y
z ] と記述する。主宇
T
宙機が円軌道運動を行う場合、従宇宙機の相対運動は次の Hill 方程式にしたがう。
d 2x
dy
− 2nc
− 3nc2 x = f dx
2
dt
dt
2
d y
dx
+ 2nc
= f dy
2
dt
dt
d 2z
+ nc2 z = f dz
dt 2
(3.3-1)
nc :主宇宙機の角速度(軌道周回角速度)
[f
dx
f dy
]
T
f dz :従宇宙機の単位質量
あたりに作用する重力以外の外力
54
主宇宙機と従宇宙機がフォーメーションフライトをするためには両宇宙機間の相対
距離が永年変動しないことが必要である。その上で、時刻零における相対位置、速度の
初期条件を適切に設定することで種々のフォーメーションフライト軌道を導くことが
できる。以下では代表的なレコード盤軌道について、Hill 座標系での相対運動軌跡を示
す。
<レコード盤軌道(General Circular Orbit)>(図 3.2-2 参照)
相対位置、速度の初期条件として、以下の設定値を用いる。
y (0) = 2 x(0) 、 z (0) = ± 3 x(0 )
dx
dz
( 0 ) = nc x ( 0 ) 、 ( 0 ) = nc z ( 0 )
dt
dt
このとき、従宇宙機の相対位置は次のように表される。
x(t ) = x(0 ){sin (nc t ) + cos(nc t )}
y (t ) = −2 x(0 ){sin (nc t ) − cos(nc t )}
(3.3-2)
z (t ) = ± 3 x(0 ){sin (nc t ) + cos(nc t )}
これより従宇宙機の運動は、yz 平面を y 軸まわりに±30 度回転した平面内に限られ
る。また従宇宙機と主宇宙機の間の距離は 2 2 x(0 ) で一定(レコード盤半径)であり、
上記の平面内での運動軌跡は円となる。
55
xy 平面軌跡
yz 平面軌跡
zx 平面軌跡
宇宙機軌道
xyz 空間軌跡
主宇宙機の軌道 1 周期の円軌道を直線に
展開したときの従宇宙機の相対位置関係
図 3.3-2 レコード盤軌道における相対運動軌跡
(緑が主宇宙機、青が従宇宙機を示す)
56
フォーメーションフライト軌道としては、レコード盤軌道の他にイントラック軌道
(In-track Orbit)、振り子軌道(Pendulum Orbit)、カートホイール軌道(Cartwheel
Orbit)、PCO(Projected Circular Orbit)、螺旋軌道(Helix Orbit)などがある。
(表 3.3-1 参照)
これらの代表的な 6 フォーメーションフライト軌道が、それぞれの軌道の Hill 座標
系における相対運動軌跡をまとめて表 3.3-1 に示す。この中でこれまで実際にフォーメ
ーションフライトで採用されている軌道としては、イントラック軌道と振り子軌道であ
る。また 2010 年度に打上げ予定の Tandem-X では螺旋軌道が採用される予定である。
表 3.3-1 代表的なフォーメーションフライト軌道のまとめ
57
3.3.2
軌道/姿勢制御方式の調査及び検討
衛星間の相対運動ダイナミクスは Hill 方程式で近似されるため、このモデル(Hill
方程式の解(状態遷移マトリクス))に基づいて制御系を構成することが推薬消費抑制
につながる。図 3.3-3 は Hill 方程式の解を用いた典型的な軌道制御系(インパルス制
御系)の構成を示したものである。ここでは制御周期(スラスタを噴射する周期)を Δτ 、
現在時刻を t 0 として、状態遷移マトリクスを用いて次の噴射タイミング t 0 + Δτ におけ
る相対位置を予測し、そこでの誤差が零となるようにスラスタを噴射してフィードバッ
ク制御を行う。
図 3.3-3 インパルス制御による軌道制御系のブロック図
3.3.3
フォーメーションフライト実現に向けた技術課題
フォーメーションフライト実現に向けた主要な技術課題としては、以下の 7 項目があ
る。
(1)フォーメーションフライトの誘導制御技術
(2)高精度な相対位置計測センサ
(3)高精度な位置制御アクチュエータ
(4)衛星間通信技術
(5)高精度な時刻同期
(6)自律分散的制御アーキテクチャ
(7)忠実度の高いモデリング・シミュレーション技術
58
(1)
フォーメーションフライトの誘導制御技術
フォーメーションフライトの誘導制御技術には以下の二つがある。
a.
フォーメーションフライトの軌道設計、形成・維持制御及び制御精度要求
制御精度と基線長と相関を図 3.3-4 に示す。
図 3.3-4 フォーメーションフライトのミッションにおける基線長と制御精度の関係
b.
衝突回避手法
衝突回避手法には、能動的な動作をせず軌道運動を利用して衝突を避ける DA
(Disable Abort)と、積極的にスラスタを用いて衝突しない軌道に入れる CAM
(Collision Avoidance Maneuver)の二つの方法がある。
(2)
高精度な相対位置計測センサ
制御精度要求の高まりとともに、相対位置センサ計測精度に対する要求も高まっ
ている。ただし、多くはまだ研究開発段階である。
a.
画像センサ
相対位置と相対姿勢の 6 自由度計測が高精度に計測可能なセンサが必要。(図
3.3-5 参照)
図 3.3-5 フォーメーションフライト用画像センサ FINE
b.
レーザ干渉計
折り返しのレーザ光を干渉させること高精度計測を実現。
59
c.
二周波 GPS 受信機
電離層遅延量をキャンセルし数 km の相対距離で cm オーダの相対位置計測が可能。
(3)
高精度な位置制御アクチュエータ
制御精度要求の高まりとともに、微小力、トルクを発生可能なアクチュエータの
要求も高まっているが、多くはまだ技術実証段階である。
a.
電気推進
低推力、高 Isp の推進系として注目を集めている。(図 3.3-6 参照)
図 3.3-6
ThalesAlenia 社のホール型スラスタ
b. パルス型プラズマスラスタ(PPT)
多くの電気推進とは異なり、パルス駆動が可能で、推力の最小インパルスが小さ
いのが特徴。
c.
レーザ推進
レーザ照射を行うことで、マイクロ固体ペレットを着火・燃焼させたり、固体樹
脂を気化させたり(アブレーション)することなどにより推力を得る。(図 3.3-7
参照)
図 3.3-7 マイクロスラスタ概念図
60
(4)
衛星間通信技術
現状は SAR 画像などの大容量の観測データをリアルタイム伝送するだけの通信容
量はなく、ミッションによっては制約となっている。高指向性の光アンテナでパワ
ーを集中して伝送する光衛星間通信の利用が考えられている。(図 3.3-8 参照)
図 3.3-8 光衛星間通信
(5)
高精度な時刻同期
GPS 信号を利用できる地球周回低軌道であれば、数十 ns の精度で時刻同期をとる
ことが可能である。時刻同期精度をこれよりも一桁以上あげるためには、現状すぐ
に使える手段がなく課題となっている
(6)
自律分散的制御アーキテクチャ
フォーメーションフライトを構成する衛星機数は 2~6 機と幅がある。2 機の相対
航法、相対制御の考え方をそのまま N 機の衛星に適用すると、相互にやりとりする
情報量は組合せ的に増大する。そのため、多様な指標で制御・航法アーキテクチャ
を考察する必要がある。(図 3.3-9 参照)
図 3.3-9 制御・航法アーキテクチャ
61
(7)
忠実度の高いモデリング・シミュレーション技術
実時間で複数衛星の挙動及び相互関係を正確に模擬する地上試験環境の構築も大
きな課題である。JPL では Formation Algorithm and Simulation Testbed(FAST)
と名付けられた試験環境の開発が進められている。(図 3.3-10 参照)
Hardware 試験設備
FAST で模擬した FCT
(FCT:Formation Control Testbed)
図 3.3-10 地上試験環境の開発
62
第 4 章
4.1
将来複数衛星連携システムの検討
概要
第4章では、将来実現すべき複数衛星連携システムを運用方法も含めて検討を行う。
さらに、検討したシステムの有効性を解析やシミュレーションなどにより明確化する。
本章での主な実施内容及び成果を以下に示す。
将来実現すべき複数衛星連携システムに関し、以下の6件のコンセプトを構築し、
各コンセプトに対し、ミッション用途、サービスの特徴、コンステレーション/フ
ォーメーションフライト配置及びシステム構築の特徴を整理した。
コンステレーション衛星システム(案)
光学衛星コンステレーション(観測頻度向上)
SAR 衛星コンステレーション(データ即応性向上)
小型/超小型衛星複合コンステレーション
フォーメーションフライト衛星システム(案)
SAR 衛星フォーメーションフライト(計測精度向上)
バーチャル衛星型フォーメーションフライト(Satellite Community)
大型構造物構築型フォーメーションフライト衛星システム
光学コンステレーション衛星のコンセプト案として、2.1 節に示すコンステレーシ
ョン衛星システムの有効性分析の結果を踏まえ、地上分解能と再訪周期とを両立
させるシステム例及びコンステレーション配置を検討し、既存コンステレーショ
ン衛星に対する優位性を示した。第二のコンセプト案として、小型/超小型衛星複
合コンステレーションでの応用例として広域/詳細画像同時取得システム例のコ
ンステレーション配置を検討した。さらに第三のコンセプト案として、SAR 衛星で
のデータ即応型システム例を検討し、日本周辺観測のための軌道、データ即応性
を高めるための国内地上局配置、海外観測でのデータ即応性改善のための通信な
どを検討した。本軌道検討では、日本周辺域における観測即応性と観測網羅性の
観点で、従来の太陽同期軌道に比べ低軌道傾斜角の軌道が有利であることがわか
った。
SAR 衛星フォーメーションフライトのコンセプト案として、2.2 節に示すフォーメ
ーションフライト衛星システムの有効性分析の結果を踏まえ、高精度地形計測の
ためのフォーメーションフライトシステム例及び移動目標検出・速度推定の情報
提供のためのシステム例を示し、2 種類のフォーメーションフライトシステムが同
63
一のシステムでのフォーメーションフライト軌道変更にて構成できることを示し
た。また小型/超小型衛星複合フォーメーションフライトでの応用例として
BiStatic SAR システム例を検討した。第二のコンセプト案として、Satellite
Community システムに関してシステム例、その有効性、System F6 との比較及び実
現課題などについて分析した。さらに第三のコンセプト案として、大型構造物構
築型フォーメーションフライト衛星システムに関してシステム例及び大型構造物
の構築シーケンスなどの検討を実施した。
コンステレーション衛星システム及びフォーメーションフライト衛星システムの
軌道最適化検討のため、第一に SAR-Lupe 及び TanDEM-X などの既存システムの軌
道設計を分析した。第二に、コンステレーション衛星システムの軌道検討では、
SAR-Lupe の軌道分析及びデータ即応性解析を踏まえ、低軌道傾斜角軌道で最適な
6機コンステレーション軌道配置及び地上局配置について明らかにし、日本付近
の観測即応性を解析した。
コンステレーション及びフォーメーションフライトのコンセプト事例に対し、STK
汎用ツールに適用する衛星形状モデルを作成し、複数衛星化の有効性やメリット
を示すための、可視化シミュレーションを実施した。
将来実現すべき複数衛星連携システムのコンセプト構築の検討に関し、4.2 節にはコ
ンステレーション衛星システムの検討を、4.3 節にはフォーメーションフライト衛星シ
ステムの検討を、4.4 節には運用システム・運用方法及び軌道の検討を示す。
64
4.2
コンステレーションシステムの検討
本節では、光学衛星コンステレーションと、SAR 衛星コンステレーションのシステム
を提案する。
4.2.1
光学衛星コンステレーションによる多頻度/即応観測ミッション例
可視光光学観測分野において今後実現することが期待される特徴を 2 点にまとめるこ
とができる。
1.
分解能と再訪日数の向上を同時に満足すること
2.
観測効率を高めること
以下、それぞれの特徴を実現するコンステレーションを示す。
4.2.1.1
任意地点観測システム
4.2.1.1.1
提案するコンステレーション配置
3 機の衛星を同一軌道に配置する。軌道、衛星諸元は、下記の通り。
z
軌道高度
: 500km
z
衛星数
: 3機
z
軌道傾斜角
: 97 度
z
昇交点通過地方時
: 10:30(3 機とも)
z
質量
: 450kg 以下
z
瞬時視野角
: 1μrad 以下(分解能 0.5m 以下@直下点)
z
姿勢レート
: 1 度/秒
z
通信レート
: 約 800Mbps
4.2.1.1.2
特徴
特徴は、高速・広角姿勢変更機能によりオフナディア観測可能範囲を拡大し、3 機にて
再訪周期1日以内を実現していること及び先端中型衛星相当の高分解能(GSD0.5m 以下@
直下点)を有する光学センサを搭載することで、オフナディア時の高分解能と高頻度観
測とを両立していることである。(表 4.2-1 参照)
表 4.2-1 他のコンステレーションとの比較
システム
本提案の
コンステレーション
RapidEye
GeoEye(*1)
WorldView(*1)
軌道高度
[km]
必要機数
重量
[kg/機]
総重量
[kg]
解像度[m]
(nadir)
500
3
450
1350
0.5
620
681
770
5
2
2
150
2000
2700
750
4000
5400
6.5
0.41
0.5
(*1)同一諸元の衛星を同一軌道に打ち上げ、再訪日数 1 日を実現すると仮定した場合。
65
4.2.1.2
広域/詳細画像同時取得システム
4.2.1.2.1
提案するコンステレーション配置
3 機の小型衛星を同一軌道に配置し、かつ 3 機の超小型衛星を同一軌道に配置するもの
である。小型衛星の軌道と、超小型衛星の軌道は必ずしも同一である必要はない。軌道、
衛星諸元は以下の通り。
z
軌道高度
: 500km
z
衛星数
: 6機
z
軌道傾斜角
: 97 度
z
昇交点通過地方時
: 10:30(3 機の小型衛星)
9:00(3 機の超小型衛星)
小型衛星
z
質量
: 450kg 以下
z
瞬時視野角
: 1μrad 以下(分解能 0.5m 以下@直下点)
z
姿勢レート
: 1 度/秒
z
通信レート
: 約 800Mbps
超小型衛星
z
4.2.1.2.2
質量
: 200kg 以下(参考値)
特徴
特徴は、広域センサを有する超小型衛星と、詳細センサを搭載する小型衛星が、およ
そ 1 時間半の差をもって同一地域を観測可能としていることである。超小型衛星が小型
衛星に先行する軌道をとるため、まず広域センサで観測し、次にその結果に基づいて詳
細センサで観測を行うことができる。
これらの衛星間でデータのやりとりを行えば、広域画像を撮影した超小型衛星が、そ
の結果を小型衛星に通知することができる。
66
4.2.2
SAR 衛星コンステレーションによるデータ取得即応型ミッション例
データ取得即応性を重視したコンステレーションシステムを提案する。特に、日本近
郊におけるデータ取得即応性として 3 時間を目標とする。
以下のような流れで検討を進める。
(1) 日本周辺観測における最適軌道設計: 日本周辺観測において、「観測即応性」と
「観測網羅性」を重視したコンステレーション軌道を提案する。ここでは、コマ
ンドのアップリンク、データのダウンリンクなどの通信を考慮せず、「観測性能」
のみに着目し、最適な軌道を設計する。
(2) 国内観測のデータ取得即応性を重視した地上局配置: 提案コンステレーションに
関し、1 パス内での「コマンドアップリンク」「観測」「データダウンリンク」を
実現できる地上局配置案
(3) 海外観測におけるデータ取得即応性改善のための通信検討: (1)で提案したコ
ンステレーションに対し、通信を工夫することで海外観測のデータ取得即応性を
改善する。
4.2.2.1
日本周辺観測における最適軌道設計
ここでは、日本周辺域における観測即応性と観測網羅性の二つを改善したコンステレ
ーションの提案を行う。観測即応性と観測網羅性は、以下のような定義とする。
z
観測即応性 (3 時間後カバレッジ率): ある地域範囲において、要求発生から比
較的短時間のうちに観測可能な地域のカバレッジ率。ここでは、3 時間を目安と
する。
z
観測網羅性 (カバレッジ率 99% 時間): ある地域範囲において、網羅的観測 (カ
バレッジ 99%) を達成する時間。
4.2.2.1.1
前提条件
以下に、今回の検討で前提とした条件を挙げる。
z
軌道高度: 500km と固定する。(高度が高くなると、SAR 観測の上で、アンテナ
サイズや電力的に不利になる。高度が低くなると、観測幅の減少、空気抵抗の増
加などの問題が発生するため。)
z
衛星数: 今後の事業化も踏まえ、現実的な 6 機とする。
z
通信: 衛星軌道の検討では、地上との通信や、衛星間通信に対する考察はしな
い。あくまで要求発生時にアップリンクもできると仮定し、観測の即応性・網羅
性の検討に終始している。通信の検討は本資料の 4.2.2.3 項に示す。
z
観測カバレッジ: 北緯 20 度から 50 度の地域のカバレッジを考察する。日本の
排他的経済水域をほぼ網羅する地域の観測を重視している。
z
SAR センサ観測可能域: 左右サイドルック、オフナディア角 20 度から 50 度とす
る。 (地上から見た仰角範囲は 34.3 度から 68.4 度となる。)
67
4.2.2.1.2
コンステレーション案
表 4.2-2 に、従来の軌道(太陽同期軌道、①とする)と、南北軌道(日本域で網羅的に
観測できる極軌道、②とする)、そして提案した低軌道傾斜角軌道(③とする) の比較
をする。観測即応性に関しては、③の低軌道傾斜角軌道が優れていることがわかる。
観測網羅性に関しては、③は②に劣るが、これはある衛星の観測できない地域を、
他の衛星で補うことが難しいからである。
当該検討では、観測即応性を重視しているため、③の軌道を採用するとして今後
の検討を進める。
表 4.2-2 各コンステレーション案の比較
コンステレーション軌
① 太陽同期軌道
② 南北軌道
道案
③ 低軌道傾斜角
(@日本域)
軌道傾斜角 (度)
97
87
45
高度 (km)
500
500
500
昇交点赤経 (度)
0、 105、 255
0、113、247
0、 60、 124、 184、
236、 296
観測即応性
57.0
60.6
82.1
11 時間 29 分
8 時間 35 分
10 時間 03 分
SAR-Lupe 方 式 に よ
SAR-Lupe 方 式 に よ
低軌道傾斜角による
る衛星直下不観測地
る衛星直下不観測地
日本域観測即応性の
域補完
域補完
改善
3 時間カバレッジ率(%)
観測網羅性
99%カバレッジ時間
備考
68
4.2.2.2
4.2.2.2.1
国内観測のデータ取得即応性を重視した地上局配置
低軌道傾斜角軌道の特徴と地上局の配置
軌道傾斜角 45 度のコンステレーションでは、衛星は西~南西から接近し、東~南東
へ抜ける。国土の北側に厚い通信範囲を確保する必要がなくなる。
よって、基本的には国土の中緯度域(北緯 35 度域)の東西に地上局を配置し、補助的に
南西、南東域に地上局を配置する。日本の国土が南西側に広いことを考えると、アップ
リンク用の地上局は南西に必要である。アップリンクよりもダウンリンクにより時間が
かかることを考えると、国土の南東にも地上局が必要であろう。(図 4.2-1 参照)
東側通信終了域
東側通信終了域
西側通信開始域
国内観測域
コマンドアップリンク域
データダウンリンク域
図 4.2-1 国内観測におけるコマンドアップリンク/データダウンリンク域の提案
表 4.2-3 に示す地上局配置を考える。
表 4.2-3 地上局配置案
地上局カテゴリ
既存局
新規局
優先度 1 地上局 東側
茨城県 筑波
千葉県 銚子
優先度 1 地上局 西側
鹿児島県 内之浦
長崎県 五島列島 / 男女群島
優先度 2 地上局 南西域
沖縄県 沖縄本島
沖縄県 与那国島
優先度 3 地上局 南東域
東京都 小笠原諸島父島
東京都 南鳥島
(新規設備追加必要)
69
(通信回線の問題あり)
4.2.2.3
海外観測におけるデータ取得即応性改善のための通信検討
本項では、上記で設計した軌道において、観測対象域を国外(北緯 20 度から 50 度の
地域)まで拡張した場合のデータ取得即応性について検討する。データ取得即応性を上
げるために、以下の手段が考えられる。
・国外地上局の追加
・LEO~LEO 間での衛星間通信
・GEO データ中継衛星の利用
これらの方法において即応性がどれほど向上するかを解析により比較し、システム設
計の観点から費用などとのトレードオフを行う。さらに、衛星間通信においてはミッシ
ョンデータの通信も想定して、必要なデータレート、衛星間通信機器の標準衛星バスへ
の搭載性を検討する。
4.2.2.3.1
国外地上局の追加
本項では、国外地上局を追加した場合のデータ取得即応性を検討する。衛星から国内
局へのアクセス時間の穴を埋めるため、オーストラリアに地上局を設置する(図 4.2-2)。
オーストラリア局追加により、最大のアクセス時間の穴が、国内4局のみでの 11.5 時間
から 80 分に短縮される。
南緯34° 東経148°
図 4.2-2 オーストラリア地上局追加
70
4.2.2.3.2
即応性の比較とトレードオフ検討
解析によるデータ取得即応性の比較結果を表 4.2-4 に示す。要求発生から撮像データ
のダウンリンクまでを、各シーケンスにおいてのワーストケースでの要する時間を比較
している。参考に、LEO~LEO 間衛星間通信+国外地上局のケースも考えているが、これ
は費用が膨大なものとなるため現実的ではない。
さらに即応性に加え、費用、保守性、秘匿性、衛星システムへのインパクトについて
トレードオフを行った結果を表 4.2-5 に示す。費用におけるランニングコストは、シス
テムの寿命を 7 年間とした場合の積み上げ値である。搭載衛星間通信機器の重量や消費
電力は、光衛星間通信において最新の軌道上実証例である TerraSAR-X の光通信機器を
参考にした。トレードオフの結果として、日本周辺観測における最適軌道として設計し
た軌道の衛星コンステレーションにおいて、国外までの観測を視野に入れるならば、国
外地上局の追加が、データ取得即応性の向上において良い手段となることが明らかとな
った。それは、費用や保全性、衛星へのインパクトにおいて優れており、データ秘匿性
に関しても暗号化などの対処法があることに基づく。
71
表 4.2-4 データ取得即応性比較
国内地上局のみ
撮影要求
撮影衛星のコマンド取得
撮影
~
~
~
撮影衛星のコマンド取得
撮影
撮像データダウンリンク
11.5時間
3時間
11.5時間
26時間
80分
3時間
80分
5時間40分
70分
3時間
75分
5時間25分
42分
3時間
54分
4時間36分
42分
3時間
42分
4時間24分
合計時間
国内地上局
+
国外地上局
国内地上局
+
衛星間通信
国内地上局
+
国外地上局
+
衛星間通信
国内地上局
+
GEO データ中継衛星
72
表 4.2-5 回線のトレードオフ
初期費用
費用
国外地上局追加
LEO~LEO 衛星間通信
GEO データ中継衛星の利用
○
△
△
地上局設備費+地上回線設備費
光通信機器 開発・製造費
光通信機器 開発・製造費
10億円程度
45億円 (6機)
45億円 (6機)
△
ランニング
地上局維持費(人件費含む)
○
○
コスト
+地上回線使用料
ランニングコストはなし
ランニングコストはなし
○
○
◎
(5時間40分)
(5時間25分)
(4時間24分)
△(配慮が必要)
○
○
△
△
○
△
△
(変更なし)
(光通信機器 質量 +30kg)
(光通信機器 質量 +30kg)
○
△
△
(変更なし)
(光通信機器 消費電力 +130W)
(光通信機器 消費電力 +130W)
8億円程度
即応性
(撮影要求~データ DOWN
ワースト時間)
秘匿性
○
保守性
衛星システムへの
インパクト
(不具合時の対策が容易)
重量
消費電力
73
4.2.2.3.3
通信技術検討
前章まではコマンドや撮像データの衛星間通信を持つシステムを想定し、即応性を検
討した。本項では、撮像データの衛星間通信に必要なデータレートを見積もる。
(1)
ミッションデータ衛星間通信に必要なデータレート
日本周辺観測における最適軌道として設計したコンステレーションの軌道では、
衛星間距離 5000km の制限の下、衛星間通信可能時間は 6 分程度となる。この時間内
に、コマンドのみならず撮像データの通信を行うための必要なデータレートを見積
もる。
撮像データのデータ量は、ダウンリンクの1パスで地上局へ直接伝送を行える撮
像データの容量として上限を与える。ASNARO を例にとると、832Gbps の 16QAM 直接
伝送で、地上局可視時間約 10 分の間に伝送可能なデータ量は 61GB である(これは、
15km×10km の画像データ 1 シーンに対して、約 29 シーンに相当)。この量の画像デ
ータを 6 分の衛星間通信で伝送するためには、1.35Gbps のデータレートが必要とな
る。
74
4.3
フォーメーションフライト衛星システムの検討
本節では、フォーメーションフライト衛星システムのコンセプト提案として、図 4.3-1
に示す四つのアプリケーション/コンセプトについて検討を行った。
図 4.3-1 アプリケーション/コンセプトの提案
75
4.3.1
複数 SAR 衛星システム検討
本項では、SAR センサを搭載した複数の衛星で形成するシステム例を示す。
4.3.1.1
高精度 DEM 生成
高精度 DEM を生成するシステム例を以下に示す。図 4.3-2 参照。
(1)
提供するサービス
高精度 DEM 生成(高精度地形計測)
(2)
目標性能
TerraSAR-X・TanDEM-X 以上の DEM の高精度化
(3)
TerraSAR-X・TanDEM-X の条件
クロストラック方向のベースライン長 基本的に 200m~400m、2 機構成のシング
ルベースライン
(4)
実現のためのシステム例
z
送信周波数
:X バンド、Ku バンド(高精度化)
z
衛星機数
:3 機
(マルチベースライン化によるコヒーレンスの改善によ
る高精度化)
z
その他
:L バンド化による植生通過特性を用いた地形計測性能の
向上も考えられる。
図 4.3-2 高精度地形計測時のシステム例
76
高精度地形計測のためのフォーメーションフライト軌道形成のシミュレーション結
果を図 4.3-3 に示す。
相対位置(Hill 座標系)
相対速度(Hill 座標系)
フォーメーションフライト形成時の軌道
形成後のフォーメーションフライト軌道
(Hill 座標系)
図 4.3-3 高精度地形計測のためのフォーメーションフライト軌道の形成
(半径 300m と 600m のレコード盤軌道の組合せ)
77
4.3.1.2
移動目標検出・速度推定情報の提供
移動目標検出・速度推定情報を提供するシステム例を以下に示す。図 4.3-4 参照。
(1)
提供するサービス
移動目標検出・速度推定情報の提供
(2)
目標性能
TerraSAR-X・TanDEM-X 以上の検出精度、広域観測ブラインド速度の低減
(3)
TerraSAR-X・TanDEM-X の条件
アロングトラック方向のベースライン長
基本的に 200m、2 機構成のシングルベ
ースライン
(4)
実現のためのシステム例
z
送信周波数
:X バンド、L バンド(広域化)
z
衛星機数
:3 機
(マルチベースライン化によってブラインド速度における
移動目標の抑圧率を低減する)
図 4.3-4 移動目標検出・速度推定時のシステム例
78
次に移動目標検出・速度推定のためのフォーメーションフライト軌道形成のシミュレ
ーション結果を図 4.3-5 に示す。
相対位置(Hill 座標系)
相対速度(Hill 座標系)
フォーメーションフライト形成時の軌道
形成後のフォーメーションフライト軌道
(Hill 座標系)
図 4.3-5 移動目標検出・速度推定のためのフォーメーションフライト軌道の形成
(相対距離 138m と 62m のイントラック軌道の組合せ)
79
なお、高精度地形計測システムと移動目標検出システムは、どちらも 3 機の衛星で構
成しているので、必要に応じてフォーメーションフライト軌道を変更して、両システム
を併用することも考えられる。図 4.3-6 は、高精度地形計測システムから移動目標検出
システムへの起動変更例を示したものである。
相対位置(Hill 座標系)
相対速度(Hill 座標系)
フォーメーションフライト変更時の軌道
変更後のフォーメーションフライト軌道
(Hill 座標系)
図 4.3-6 フォーメーションフライト軌道の変更
(移動目標検出システムから高精度地形計測システムへの変更例)
80
4.3.2
小型/超小型衛星によるフォーメーションフライト衛星システムの検討
4.3.2.1
小型/超小型複合フォーメーションフライトのコンセプト案について
送信を行う小型衛星(親衛星)と受信を行う超小型衛星(子衛星)とで構成されたフ
ォーメーションフライトにて実現する Bistatic SAR における特長を以下に示す。
(1)
特長
z
子衛星を複数機とすることで、広い範囲の反射角度から情報を抽出することが可
能である。
z
ベースライン長を長くすることが可能である。
z
子衛星の機能を最小化することが可能である。
4.3.2.2
小型/超小型複合フォーメーションフライト構成例
小型/超小型複合フォーメーションフライト構成例として、親衛星、子衛星に機能を分
配した場合の構成例を以下に示す。
(1)
親衛星(送受信可能なシステム)
z
送受信可能。
z
X または Ku バンド、鏡面アンテナとし、小型衛星に適合するリソース規模とする。
z
単独で SAR 観測が可能。
z
高出力増幅器などを有するため、比較的リソース規模が大きい。
z
効率よくフォーメーションフライト観測するために、親子衛星で同期するシステ
ムを有する必要あり。
(2)
子衛星
z
親衛星より更に小型な衛星に対応するため、受信専用としてミッションを軽量・
省電力化(親衛星の 1/4~1/5)。
z
親衛星と同じ周波数帯(X または Ku バンド)。
z
単独では SAR 観測不可。
z
効率よくフォーメーションフライト観測するために、親子衛星で同期するシステ
ムを有する必要あり。
81
4.3.3
Satellite Community システムの検討
本項では、フォーメーションフライトの応用例として、エネルギーと情報の伝送技術
を用い互いに機能を補完しあうことでシステム全体としての Robust 性と Flexibility 性
を有する Satellite Community システムの検討を行う。
4.3.3.1
Satellite Community システム概要
図 4.3-7 に Satellite Community システムの概念図を示す。この図において、衛星 A、
B、 C はそれぞれ基本的には独立した衛星である。それらの衛星が、マイクロ波送電に
よるエネルギー伝送及び宇宙 LAN によるデータ通信により相互にリンクされ、ネットワ
ークを形成している。これにより、独立した衛星がそれぞれ単独で存在する場合とは異
なった Robust 性と Flexibility を実現することができる。また、このシステムを有効
に機能させるには、エネルギー及び情報を伝送するにあたって、伝送ロス及び遅延時間
を低減化する必要がある。したがって、このコンセプトは互いの衛星が近傍にあること
が前提となっているフォーメーションフライトに向いている。
通常の独立した1衛星は、1Fault Tolerance を維持するため、完全冗長系化されてい
る。一方、Satellite Community を構成する衛星 = Satellite Community 衛星(以後、
SC 衛星)は、図 4.3-8 に示すように基本的には単系システムでありながら、故障時には
エネルギーもしくはデータのリンク機能により、他の衛星からの支援を受けることによ
りミッションを継続することが可能である。
Satellite Community は、単に Robust 性を向上させるだけでなく、電力、データレー
ト及び記録容量といったリソースを衛星間で共有することにより、従来は一つの小型衛
星では不可能であったミッションを実現できる可能性を有している。
また、SC 衛星の派生として考えられる Non-Intelligent Satellite は、ペイロードと
姿勢制御用のセンサ/アクチュエー及び他衛星とエネルギー及び情報のリンク機能の
みを有した非常に簡素化された衛星であり、低コスト・短期間で開発が可能である。こ
れにより、ペイロード開発から打上げまでの時間を短縮でき、ミッションが陳腐化する
ことを防ぐことができる。
82
レクテナ
地上伝送用アンテナ
電力伝送用アンテナ
Energy 伝送
衛星A
衛星B
宇宙無線用LAN
アンテナ
宇宙無線LAN
Non-Intelligent Satellite
衛星C
図 4.3-7 Satellite Community の概念図
電力供給・享受
電源系
エネルギ伝送系
ペイロード
通信系
テレメトリ・
コマンド情報
データ処理系
情報伝送系
軌道・姿勢制御系
センサ情報・
アクチュエータ信号
電力ライン
推進系
テレコマ情報ライン
図 4.3-8 SC 衛星の概略構成図
83
4.3.3.2
Satellite Community システムの有効性
本項では、Satellite Community システムの主要な有効性について検討する。
4.3.3.2.1
Community としての Fault Tolerance の実現
SC 衛星は、単独では単系であるため 0 Fault Tolerance であるが、エネルギーとデー
タのリンク機能により、故障したときに他衛星からの支援を受けることができる。
4.3.3.2.2
複数の衛星のリソース共有化による、実現可能なアプリケーション幅の拡大
従来の衛星、特に小型衛星においては、発生電力、データ記録/伝送能力などの利用
できるリソースに限りがあったため、実現できるアプリケーション幅に制約があった。
しかしながら、Satellite Community においては、すべての衛星のリソースが共有され
ているため、小型衛星でも一時的には大電力、高データレート、大記憶容量を必要とす
るミッションを実施することが可能となる。
図 4.3-9 にリソース共有化の効果の概念図を示す。
大型/大電力単一衛星
このレベルに合わせて
衛星システムを設計す
る必要がある。
電力 or データレートor 記録容量
小型・中型衛星のフォーメーションフライト
1つの衛星システム
はこのレベルに合
わせて設計する
他衛星の能
力も使って実
現する
電力 or データレートor 記録容量
図 4.3-9 リソースの共有化の効果
4.3.3.2.3
Non-Intelligent Satellite 導入による、開発期間の短縮化と低コスト化
Non-Intelligent Satellite は、通常の SC 衛星が情報・エネルギー連携サブシステム
を通じて、エネルギーの供給・享受、情報処理・制御サービスの提供と受益を行うのに
対し、エネルギーの享受、情報処理・制御サービスの受益のみを行う衛星である。
Satellite Community が形成されたあとに打ち上げられる Non-Intelligent Satellite
84
は、自身はエネルギーの発生能力、データ処理機能、軌道・姿勢制御機能を有さず、そ
れらの機能すべてを Satellite Community により構築されたインフラに依存してミッシ
ョンを実施する。
したがって、Non-Intelligent Satellite は、非常に構造・機能が簡素化されるため、
製造期間を短縮でき、ひいてはペイロード開発から打上げまでの時間を短縮することに
つながる。この打上げまでの時間短縮は、宇宙ミッションの陳腐化を防ぎ、先進性を維
持することに貢献し、ミッションの価値を向上させる。また、バス機能が簡略化されて
いることにより、製造・試験コストも大幅に削減できることが期待できる。
85
4.3.4
大型構造物構築型フォーメーションフライト衛星システムの検討
本項では、宇宙基地や宇宙太陽発電(SSPS)衛星などの大型構造物を構築するに当たり
必要となるフォーメーションフライトについて検討する。
4.3.4.1
概要
一般に宇宙空間に大型構造物を構築する場合に、当該構造物を一度に打ち上げること
は、打上げ失敗による全損リスクから、また保険を含め高額な打上げ費用がかかるため、
得策ではない。また、そもそも、その構造物規模によっては技術的に実現が困難である。
そこで、一般的には、国際宇宙ステーションの例に見られるように、スペースシャトル
などにより、全体を分割して小型のパーツに分けて軌道上に輸送し、宇宙空間で組み立
てることになる。
しかしながら、スペースシャトルのような有人宇宙船であれば、人の判断によりその
場の状況に応じた細かい位置・速度制御が可能であるが、無人の宇宙機により遠隔操作
で大型構造物を組み立てる場合には、打ち上げたパーツを宇宙空間でどのように保持し
て、組み立てていくかが重要である。
具体的には、構築シーケンスは以下の要求を満たしていることが望ましい。
(1)
部品が結合するときのシーケンス数が増えても変わらないこと
(2)
それぞれの部品を打ち上げた後、できるだけ少ない推薬量で結合できること
(3)
結合に失敗したときには、衝突を回避しつつ、速やかに離れることができること
(4)
一旦離れた後、再度結合を試みるとき手間がかからないこと
4.3.4.2
大型構造物構築シーケンス
フォーメーションフライトの推移により大型構造物を構築する際のシーケンスを以
下に示す。
初期状態では、図 4.3-10 に示すように、レコード盤軌道の中心に被結合体(ターゲッ
ト)があり、レコード盤上の周回軌道に結合体(チェイサ)がある。大型構造物の構築
は、チェイサがターゲットに接近し結合していくことで進んでいく。
86
図 4.3-10 大型構造物構築シーケンス概念図
大型構造物の構築シーケンスのステップ図を図 4.3-11 に示す。
~10m
チェイサが
角速度を合
ターゲット
10m 程度まで
に接近開始
接近
わせる
接合面の同期を
ドッキング
Powered Flight で
接近
図 4.3-11 大型構造物構築ステップ
87
とる
4.4
運用システム・運用方法及び軌道の検討
本節では、以下の検討を実施した。
・コンステレーション衛星システムの軌道検討
・フォーメーションフライトに関する軌道検討
・将来複数衛星連携システムの運用システム・運用方法の検討
4.4.1
コンステレーション衛星システムの軌道検討
コンステレーション衛星システムの軌道検討として以下の検討を実施した。
・SAR-Lupe コンステレーションの事例調査
・SAR-Lupe コンステレーションを参考にした即応性解析
・日本の緯度帯観測の即応性に特化したコンステレーション軌道解析
4.4.1.1
SAR-Lupe コンステレーションの事例調査
ドイツの偵察衛星群 SAR-Lupe のコンステレーションについて軌道の観点から調査し、
以下の特徴を有することがわかった。
SAR-Lupe コンステレーションは、平均高度 500km の極軌道に合計 5 機の衛星を配置し
たものである。三つの軌道面に衛星を配置し、軌道面 1 に SAR-Lupe1 と 4 の 2 機、軌道
面 2 に SAR-Lupe2 の 1 機、軌道面 3 に SAR-Lupe3 と 5 の 2 機を配している。
これらの衛星は北極及び南極域で集合するように配置されている。同一軌道面に配置
された 2 機の衛星は距離が離れているため幾何学的に衛星間通信が不可能であるが、軌
道面 2 に配置されている SAR-Lupe2 を介してすべての衛星が極域で通信可能になるよう
設計されている。これにより、地上から任意の衛星に送信したコマンドを極域で観測域
に最も早く到達する衛星に配信することができ、グローバルな即応性向上に寄与してい
る。
また、同一軌道面にある 2 機の衛星は 65~70 度の位相差を持たせている。SAR-Lupe
はオフナディア角 21 度~57 度の左右サイドルックの SAR センサを搭載しており、衛星
直下の観測はできないが、この位相差により先頭を飛行する衛星直下の観測不可領域を
後から飛行する衛星が観測できるよう設計されている。同一軌道面の 2 機の衛星により
赤道上で約 20 度の経度幅の観測が可能であり、グローバルな観測可能領域を短時間で
カバーできるよう考慮されている。
さらに、軌道面 1 と 3 の昇交点赤経の差を 130 度としている。SAR-Lupe の軌道周期か
ら軌道面 1 の軌跡の中間を軌道面 3 が通るよう設計されており、軌道面間の関係につい
ても短時間でグローバルカバレッジが達成できるよう考慮されている。
4.4.1.2
SAR-Lupe コンステレーションを参考にした即応性解析
SAR-Lupe コンステレーションの調査結果に基づき、SAR-Lupe 及びオリジナルコンス
88
テレーションでのカバレッジ及び即応性解析を実施した。ここでのカバレッジとは、SAR
による観測可能領域の時間変化を見るものである。即応性解析は、コマンド送信から観
測データダウンリンクまでのレスポンスタイムを解析するものである。
オリジナルコンステレーションは、
SAR-Lupe と同じ極軌道の 3 軌道面 5 衛星配置とし、
SAR のオフナディア角を 20 度~50 度とした。同一軌道面の 2 衛星間の位相差は SAR の
観測可能域に応じて最適化した。
カバレッジ解析は、表 4.4-1 に示す、衛星組合せのケースを設定した。
表 4.4-1 カバレッジ解析における衛星組合せ一覧
軌道面1
ケース
軌道面2
軌道面3
備考
衛星1
衛星4
衛星2
衛星3
衛星5
1
○
-
-
-
-
1軌道面1衛星
2
○
○
-
-
-
1軌道面2衛星
3
○
○
-
○
○
1軌道面2衛星×2軌道面
4
○
○
○
○
○
SAR-Lupeと同じコンステ
5 衛星のオリジナルコンステレーションの場合、緯度±60 度の領域において 3 時間後
に約 50%、6 時間後に約 75%、10 時間後に約 90%の範囲が観測可能となる(図 4.4-1
参照)。一方、SAR-Lupe の場合、3 時間後に約 60%、6 時間後に約 85%、7 時間後に 90%
の範囲が観測可能となる。1 軌道面 2 衛星でも 1 日後に 99%の範囲が観測可能となり、
1 衛星あたりの観測可能域の広さに応じた結果が得られた(図 4.4-2 参照)。
緯度±60degの領域に対する観測可能範囲の時間変化
オリジナル軌道、オフナディア角20-50deg
100
case4
観測可能範囲の割合[%]
90
80
case3
70
60
50
40
24時間後
30
Case1 : 66.64%
Case2 : 91.86%
Case3 : 99.93%
Case4 : 99.93%
20
case1
case2
10
0
2009/12/1
0:00
2009/12/1
3:00
2009/12/1
6:00
2009/12/1
9:00
2009/12/1
12:00
2009/12/1
15:00
2009/12/1
18:00
2009/12/1
21:00
2009/12/2
0:00
図 4.4-1 カバレッジ率の時間変化 オリジナル(オフナディア角 20~50 度)
89
緯度±60degの領域に対する観測可能範囲の時間変化
SAR-LupeのTLE源泉、オフナディア角21-57deg
case4
100
90
case3
観測可能範囲の割合[%]
80
70
60
50
40
30
24時間後
Case1 : 83.25%
Case2 : 99.12%
Case3 : 99.98%
Case4 : 99.98%
case1
case2
20
10
0
2009/11/26
3:00
2009/11/26
6:00
2009/11/26
9:00
2009/11/26
12:00
2009/11/26
15:00
図 4.4-2 カバレッジ率の時間変化
2009/11/26
18:00
2009/11/26
21:00
2009/11/27
0:00
2009/11/27
3:00
SAR-Lupe(オフナディア角 21~57 度)
レスポンスタイム解析は、「コマンド送信」から「観測データ受信(地上局可視)」
までの時間を評価した。レスポンスタイムの「最短時間」はコマンドアップから観測デー
タダウンリンクまでの最短時間を表し、「最長時間」は最短時間に前回コマンドアップ
から今回コマンドアップまでの「待ち時間」を加えたものである(図 4.4-3 参照)。
最長時間
要求
①要求発行
最短時間
要求
②要求受付・コマンド化
③コマンド送信(地上局可視)
1
4
2
3
5
2
1
4
2
④コマンド配布(衛星間通信)
3
⑤指定領域観測
1
3
⑥観測データ受信(地上局可視)
1
⑦観測データ処理・配布
観測後の次のパスで受信とした
(観測中の地上DLは無し)
⑧観測データ入手
入手
入手
図 4.4-3 要求発行から観測データ入手までの流れ
地上局は SAR-Lupe の地上設備のあるドイツのゲルスドルフと日本の筑波の 2 箇所を
評価対象とし、観測地域は緯度毎にベルリン、東京、シンガポールの 3 箇所とした。
また、地上との通信は SAR-Lupe と同様、コマンドアップは衛星間通信有り、観測デ
90
ータのダウンリンクは衛星間通信なしとした。
図 4.4-4、 4.4-5 はレスポンスタイムの 1 ヶ月分の統計値のグラフである。
平均 [hour]
最小 [hour]
最大 [hour]
最短レスポンスタイム
24.0
時間[hour]
20.0
16.0
12.0
8.0
4.0
ゲルスドルフ
筑波
ゲルスドルフ
SAR-Lupe
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
0.0
筑波
オリジナル
図 4.4-4 最短レスポンスタイム
ゲルスドルフ
筑波
ゲルスドルフ
SAR-Lupe
東京
ベルリン
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
時間[hour]
36.0
32.0
28.0
24.0
20.0
16.0
12.0
8.0
4.0
0.0
シンガポール
平均 [hour]
最小 [hour]
最大 [hour]
最長レスポンスタイム
筑波
オリジナル
図 4.4-5 最長レスポンスタイム
また、図 4.4-6、4.4-7 は最短レスポンスタイムと最長レスポンスタイムの 6 時間以内、
12 時間以内の割合である。
91
6時間以内の割合 [%]
12時間以内の割合 [%]
ゲルスドルフ
筑波
シンガポール
筑波
オリジナル
最短レスポンスタイムの 6 時間以内、12 時間以内の割合
最長レスポンスタイムの6時間以内、12時間以内の割合
6時間以内の割合 [%]
12時間以内の割合 [%]
ゲルスドルフ
筑波
シンガポール
東京
ベルリン
ゲルスドルフ
SAR-Lupe
図 4.4-7
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
シンガポール
東京
100.0
90.0
80.0
70.0
60.0
50.0
40.0
30.0
20.0
10.0
0.0
ベルリン
割合[%]
東京
ベルリン
ゲルスドルフ
SAR-Lupe
図 4.4-6
シンガポール
東京
ベルリン
シンガポール
東京
ベルリン
シンガポール
東京
100.0
90.0
80.0
70.0
60.0
50.0
40.0
30.0
20.0
10.0
0.0
ベルリン
割合[%]
最短レスポンスタイムの6時間以内、12時間以内の割合
筑波
オリジナル
最長レスポンスタイムの 6 時間以内、12 時間以内の割合
コマンドアップから観測データダウンリンクまでの時間について、待ち時間を含
めた定量評価を行うことができた。SAR-Lupe のコンステレーションは特にドイツな
ど比較的高緯度の観測に特化した傾向が見られた。
観測地点が東京の場合、レスポンスタイムの最長時間の平均はどのケースも 12 時
間を超えており、最長レスポンスタイムは 24 時間を超えるケースも見られた。
SAR-Lupe のような極軌道のコンステレーションはグローバルな即応性を平均的に高
めた設計であるが、中緯度に特化しているわけではない。
92
4.4.1.3
日本の緯度帯の観測に特化したコンステレーション軌道解析
前項ではドイツの偵察衛星群 SAR-Lupe の事例に基づく解析を実施した。その結果、
極軌道の 5 衛星程度のコンステレーションでは日本のような中緯度帯のレスポンスタイ
ムの平均は 10 時間台であった。災害発生後対処時間 3 時間といった即応性が要求され
るミッションへの適用を考えた場合、特定地域の観測即応性に特化したコンステレーシ
ョンの検討が必要であり、日本の緯度帯の観測に特化したコンステレーション軌道の検
討と即応性解析を実施した。
データ即応性を高めるには観測機会を増やし個々の観測機会が均一になる(時間的な
ムラがない)軌道の選択と衛星配置を検討する必要がある。ここでは、軌道傾斜角を倒
した軌道を採用し、次のコンステレーション案(表 4.4-2 参照)に基づき、観測頻度・
再訪時間(Revisit Time)及びレスポンスタイム解析を実施した。
表 4.4-2 コンステレーションの設定ケース一覧
衛星数
軌道面数
1軌道面の
軌道傾斜角
ケース記号
(T/P/F/I)
衛星数
衛星数
軌道傾
斜角
軌道傾
斜角分
離
軌道面
衛星数
○
○
○
3
3
1
41度
3/3/1/41
○
4
4
1
41度
4/4/1/41
○
5
5
1
41度
5/5/1/41
○
6
6
1
41度
6/6/1/41
○
6
6
1
45度
6/6/1/45
○
6
6
1
48度
6/6/1/48
○
6
6
1
41度と45度
3/3/1/41+3/3/1/45
6
3
2
41度
6/3/2/41
○
○
注:ケース 3/3/1/41+3/3/1/45 は軌道傾斜角 41 度に 3 衛星 3 軌道面、軌道傾斜角
45 度に 3 衛星 3 軌道面の合計 6 衛星のコンステレーションである。
図 4.4-8、 4.4-9、 4.4-10、 4.4-11 は衛星数が 3 衛星から 6 衛星までの緯度別の観測
回数の平均と再訪時間(Revisit Time)の平均のグラフである。日本の緯度帯で 8 回以
上、つまり平均 3 時間に 1 回観測可能とするためには 6 衛星が必要になることがわかる。
93
観測回数の緯度別平均 : 衛星数=3~6
20
18
稚内
16
観測回数[回]
14
3/3/1/41
4/4/1/41
5/5/1/41
6/6/1/41
那覇
12
10
8
6
4
2
東京
0
0
5
10
15
20
25
緯度[deg]
30
35
青森
40
45
50
図 4.4-8 観測頻度の緯度別平均:衛星数=3~6 の比較
Revisit Timeの緯度別平均 : 衛星数=3~6
30000
稚内
Revisit Time[s]
25000
那覇
20000
東京
3/3/1/41
4/4/1/41
5/5/1/41
6/6/1/41
15000
10000
5000
青森
0
0
5
10
15
20
25
緯度[deg]
30
35
40
45
50
図 4.4-9 再訪時間(Revisit Time)の緯度別平均:衛星数=3~6 の比較
94
図 4.4-10 日本付近の観測回数のコンター図:ケース=6/6/1/41
図 4.4-11 日本付近の平均再訪時間(Revisit Time)のコンター図:ケース=6/6/1/41
レスポンスタイム解析は、「コマンド送信」から「観測データ受信(地上局可視)」
までの時間を評価した。レスポンスタイムの「最短時間」はコマンドアップから観測
データダウンリンクまでの最短時間を表し、「最長時間」は最短時間に前回コマン
ドアップから今回コマンドアップまでの「待ち時間」を加えたものである。ここで
は衛星間通信はコマンドアップ、観測データダウンリンク共になしとした(図 4.4-12
参照)。
95
最長時間
要求
①要求発行
最短時間
要求
30分以上
②要求受付・コマンド化
5分以上
4
③コマンド送信(地上局可視)
5
4
④指定領域撮像
5
5
4
⑤撮像データ受信(地上局可視)
⑥撮像データ処理・配布
⑦撮像データ入手
入手
入手
図 4.4-12 要求発行から観測データ入手までの流れ
図 4.4-13、 4.4-14 は 6 衛星コンステレーションのレスポンスタイムの統計値のグラフ
である。地上局は根室と南鳥島の 2 箇所とし、観測地域は札幌、東京、那覇の 3 箇所と
して解析した結果である。
平均 [hour]
最小 [hour]
最大 [hour]
最短レスポンスタイム
12.0
10.0
時間[hour]
8.0
6.0
4.0
2.0
0.0
札幌
東京
6/6/1/41
那覇
札幌
東京
6/6/1/45
那覇
札幌
東京
6/6/1/48
那覇
札幌
東京
図 4.4-13 最短レスポンスタイム
96
那覇
3/3/1/41+3/3/1/45
札幌
東京
6/3/2/41
那覇
平均 [hour]
最小 [hour]
最大 [hour]
最長レスポンスタイム
12.0
10.0
時間[hour]
8.0
6.0
4.0
2.0
0.0
札幌
東京
那覇
札幌
6/6/1/41
東京
那覇
6/6/1/45
札幌
東京
那覇
6/6/1/48
札幌
東京
那覇
3/3/1/41+3/3/1/45
札幌
東京
那覇
6/3/2/41
図 4.4-14 最長レスポンスタイム
また、図 4.4-15、 4.4-16 は最短レスポンスタイムと最長レスポンスタイムの 3 時間以
内、4 時間以内、6 時間以内の割合である。
最短レスポンスタイムの3時間以内、4時間以内、6時間以内の割合
100.0
3時間以内の割合[%]
4時間以内の割合[%]
6時間以内の割合[%]
90.0
80.0
割合[%]
70.0
60.0
50.0
40.0
30.0
20.0
10.0
0.0
札幌
東京
6/6/1/41
那覇
札幌
東京
6/6/1/45
那覇
札幌
東京
6/6/1/48
那覇
札幌
東京
那覇
3/3/1/41+3/3/1/45
札幌
東京
那覇
6/3/2/41
図 4.4-15 最短レスポンスタイムの 3 時間以内、4 時間以内、6 時間以内の割合
97
最長レスポンスタイムの3時間以内、4時間以内、6時間以内の割合
100.0
3時間以内の割合[%]
4時間以内の割合[%]
6時間以内の割合[%]
90.0
80.0
割合[%]
70.0
60.0
50.0
40.0
30.0
20.0
10.0
0.0
札幌
東京
6/6/1/41
那覇
札幌
東京
6/6/1/45
那覇
札幌
東京
6/6/1/48
那覇
札幌
東京
那覇
3/3/1/41+3/3/1/45
札幌
東京
那覇
6/3/2/41
図 4.4-16 最長レスポンスタイムの 3 時間以内、4 時間以内、6 時間以内の割合
最短レスポンスタイムはどのコンステレーションでも 2 時間以内であり、一つ前のパ
スでコマンドアップし、観測パスで観測データを地上局に送信できていることがわかる。
最長レスポンスタイムは 1 軌道面 2 衛星の 3 軌道面を持つ軌道傾斜角 41 度のケース
(6/3/2/41)が日本の緯度帯観測に優れており、災害発生後対処時間 3 時間の即応性を
前提とした場合、今回設定したコンステレーションでは東京で 3 時間後に 60%以上の割
合で最長レスポンスタイムを満たすことができる結果を得た。ただし、このレスポンス
タイムには要求発生からコマンド化するまでの時間、地上局でデータを受信してから観
測データがユーザの手元に届くまでの時間は考慮されていないため、今後はそれらの時
間見積りも加味した評価を行う必要がある。
また、SAR-Lupe コンステレーションによるレスポンスタイム解析の結果と比べ、レス
ポンスタイムが短縮できていることから、日本の緯度帯での SAR による重点観測には極
軌道よりも軌道傾斜角を倒した軌道のコンステレーションの方が優れている結果が得
られた。今回の解析では観測後 10 分以内に観測データを地上に送信することを前提と
した結果であり、観測パスと同じパスで短時間にデータ伝送が可能か検討を進める必要
がある。
なお、今回の解析を通して衛星コンステレーションについて、回帰性、位相差、昇交
点赤経、軌道傾斜角などの調整、観測頻度や即応性評価までの一連の検討アプローチを
明確にすることができた。
98
4.4.2
フォーメーションフライトに関する軌道検討
干渉 SAR に有効なフォーメーションフライトに関し海外の事例に基づく軌道調査を実
施した。
4.4.2.1
TandemX の HELIX Satellite Formation について
TandemX の HELIX Satellite Formation は既に軌道上にある TerraSAR-X との組合せで
実現される。HELIX 軌道は、二つの衛星軌道の昇交点赤経をずらすことによりクロスト
ラック方向のベースラインを確保し、二つの衛星軌道の周期は変えないで離心率をずら
すことにより高度方向のベースラインを確保したフォーメーションフライトである。近
地点を最北点とした凍結軌道に投入しこれを保持することにより、二つの衛星は衝突す
ることなくある程度の距離を保ちながら螺旋を描くように飛行する。本検討では 2 衛星
の軌道を伝播し、相対的な位置関係を確認した。
4.4.2.2
Interferometric Cartwheel Constellation について
CNES が開発した Interfermetoric Cartwheel 軌道について調査した。この軌道は親衛
星の軌道に対し、子衛星の軌道の離心率を変え、近地点を軌道周回上で均等に割ること
で親衛星に対し 3 機の子衛星が同じ楕円を描くように近づいたり離れたりする軌跡を描
く。3 機の子衛星のω+M(近地点引数+平均近点離角)を同一にすることにより実現される。
本検討では 3 機の子衛星の軌道を伝播し、相対的な位置関係を把握した。
今後、それぞれのフォーメーションフライトについて衝突危険性を回避した最適な軌
道投入シーケンスと投入後のフォーメーションフライト軌道保持運用について検討を
進める必要がある。
99
4.4.3
運用方法の検討
4.4.3.1
複数衛星連携システムの特徴
複数衛星連携システムの利点は、複数衛星の存在を意識せずに高いサービスレベル
(高頻度、高性能、高付加価値、ロバスト性など)をユーザに提供できるところにある。
本システムでは、衛星搭載の地球観測センサなどにより得られる観測データをもとに
処理・加工を施したプロダクトをミッションユーザに提供することを目的とし、単一衛
星システムに対する有利性を活かした付加価値を付与したサービスを提供可能とする。
以下に、付加サービスの代表例を示す。
高頻度:観測実施可能数の増加、短時間内での連続観測の実施
即応性:観測機会の増大、観測間隔の短縮を目的とした軌道上配置により、
任意地点の最大観測インターバルを短期間化
高性能:複数衛星間の協調観測による分解能の向上
高付加価値:時間変動データの抽出、移動体検出
ロバスト性:複数衛星間の相互補完によるサービスレベル維持
本システムが提供可能な付加サービスをどのように組み合わせ、ユーザサービスとし
て提供するのかにより、運用コンセプトや運用システムに対する要求事項が変化するこ
ととなる。
一方、単一衛星システムに較べると運用対象となる衛星数が多い本システムは、運用
コストの点では不利になりやすい。高付加価値サービスを提供可能としていても、サー
ビス享受のコストが大きければ、全体的なサービスレベルは下がることとなり、ユーザ
ニーズを失うことになる。そのため、複数衛星連携により高付加価値サービスを提供す
ると共に、低コスト運用を実現するための運用コンセプトやシステムコンセプトが重要
となる。自動化・省力化といった対応はもちろんであるが、例えば、複数衛星によるト
ータルサービスのロバスト性を活かしたベストエフォート型の運用コンセプトをとる
と、リカバリ時間などの保守要求レベルを下げることが可能となり、トータル運用コス
トの低減化をもたらすと予想される。このように、複数衛星連携システムの得失を活か
し、補い合うシステムコンセプトが求められる。
4.4.3.2
全体システムの定義とサービス範囲
複数衛星連携システムによりどのようなサービスを提供するかは、システム全体とし
て実現すべきミッションと全体システムに関する具体的な検討により定義されていく
100
ことになる。具体的なミッションについては、今後、全体システムとしての実現性も含
めて検討・評価されていくことになるが、ここでは、より一般化したシステムとして検
討対象を定義する。
まず、本システムの利用者(ユーザ)として、「ミッションユーザ」と「運用ユーザ」
の区分を設定する。(表 4.4-3 参照)
「ミッションユーザ」を、観測データ要求の発信元であり、データ利用者である「エ
ンドユーザ」と、エンドユーザの要求を本システムに適合した要求に翻訳し、本システ
ムの提供プロダクトをエンドユーザの欲している情報に加工する「エージェントユー
ザ」に区分する。
「運用ユーザ」については、衛星運用管制及び運用計画立案に携わる「衛星運用ユー
ザ」とプロダクト加工処理に関わる「データ処理運用ユーザ」に区分する。
表 4.4-3 ユーザ区分一覧
ユーザ区分
ユーザ識別
概要
ミッション
エンドユーザ
最終的なシステムユーザ
ユーザ
観測要求の発信元であり、提供プロダ
クトの利用者である。
エージェントユーザ
エンドユーザには困難な観測要求の
各種パラメータの設定支援や、取得さ
れた観測データなどの解釈・判読によ
りユーザの欲しい情報携帯に加工し、
提供する。
運用ユーザ
データ処理運用ユーザ
取得された観測データの低レベル工
学値変換処理(レベル0/1)の実行
管理を実施する。
衛星運用ユーザ
ミッション機器を含む衛星の運用計
画作成及び衛星バス・ミッション機器
に関わる運用管制を実施する。
本システムのサービスとしては、“ミッションユーザより要求設定されるセンサ観測
要求に対し、ある時間を経過した後に、要求設定された内容に則した観測データプロダ
クトを提供する”と定義する。本システムの基本的なサービスの定義を図 4.4-17 に示す。
101
衛星全体システム
衛星システム
搭載システム
地上システム
衛星全体システム
観測要求
観測データ
ミッション
ユーザ
図 4.4-17 衛星全体システムサービス定義
エンドユーザに対するサービスはエージェントユーザを媒介して実施され、エンドユ
ーザの要求は本システムに適合する形にエージェントユーザによって変換された後に
本システムに設定・投入される。また、得られた観測データについてもエンドユーザの
ニーズに則した情報形態に加工・変換されて提供することとなる。
本システムがエンドユーザに対して直接的なサービス提供を実施する場合には、エー
ジェントユーザが実施しているデータ利用に関するコンサルティングサービスをシス
テム化し、取り込むことになる。サービス提供のレベルや提供プロダクトのレベルによ
り、その実現方法や内容は変化する。これらについては、本システムの目的とするミッ
ションの検討・選定結果と、それに応じた提供サービスの内容とレベル設定を検討し、
その実現課題の洗い出しと課題解決に向けた対応方針を明らかにしていくことになる。
また、運用システムとしては、運用ユーザである衛星運用ユーザ及びデータ処理運用
ユーザに対するサービスを規定し、システム化要件を洗い出していくことになる。運用
コストの低減化のためには、運用ユーザの定常的な運用への関与は局所化されることが
望ましい。
本システムにおける各ユーザへのサービス状況概要を図 4.4-18 に示す。
102
協調制御
統合制御
バス機器
制御
協調制御
観測要求
協調制御
測
ミッション運用
サポート
データ処理
運用ユーザ
観
測
要
ミッション機器
制御
地上システム
観
搭載システム
デ
ー
タ
衛星システム
求
エンドユーザ
衛星全体システム
エージェント
ユーザ
バス運用
サポート
衛星運用ユーザ
図 4.4-18 ユーザサービス状況概要
4.4.3.3
複数衛星連携システムの運用方針
複数衛星連携システムのうち、コンステレーション軌道による連携運用については、
緊急観測運用に対する即応性が重要となる。事象発生~観測運用実施~観測データ(プ
ロダクト提供)までの所要時間において、運用者の操作・判断に要する時間が不確定要
素を含み、時間短縮を阻害する大きな要因となりうる。特に、複数衛星にまたがる運用
計画の状況確認・計画立案・計画調整は、衛星数の増大と共に複雑度を増していく。ま
た、衛星の運用状況・健全性の確認や、観測要求に対するプロダクト提供までの処理の
進捗状況の確認などについても、衛星数の増大と共に煩雑性を増していき、運用コスト
の増大だけではなく、サービスレベルの低下や信頼性の低下を招きやすくなる。
本システムでは、複数衛星運用に関わる統合的な運用計画機能及び統合的な衛星管制
機能を整備し、緊急観測対応を含めた定常観測運用の無人化を基本方針とし、以下を実
現する。
1)サービス提供の迅速性確保
2)安定した確実性の高いサービス提供
3)価格競争力の高いサービス提供
103
4.4.3.4
システム化に向けての課題
事象発生~観測運用実施~観測データ(プロダクト提供)までの時間短縮に関わる即
応性向上と複数衛星の統合運用に関わる課題を示す。
4.4.3.4.1
即応性向上に向けての対応
事象発生~観測運用実施~観測データ(プロダクト提供)までのプロセスにおいて、
所要時間短縮の重要部分を占めるのは、複数衛星の連携軌道をどのように設計するのか
ということになる。これについては、衛星開発・打上げ・運用コストと提供サービスレ
ベルとのトレードオフにより、ミッション要求と合わせて適切な衛星数と軌道配置を設
計していくことになる。また、観測計画送信、観測データダウンリンクに使用可能な局
設備とデータ伝送経路をどのように確保するのかも、サービス内容を左右する大きな要
因となる。
運用システムとしては、所要時間の短縮と確実性の向上のためには、以下の一連の処
理を自動化し、リアルタイムでの運用者判断を介在させないこととする。
ユーザ要求受付
↓
観測計画立案・検証
↓
観測計画送信
↓
観測実施
↓
観測データダウンリンク
↓
観測データ処理
↓
プロダクト提供
これらの処理を自動化する上での課題は、以下のものとなる。
1)ユーザ要求間の調整ルールのシステム化
2)複数衛星に関わる最適化問題の処理方式
3)提供プロダクトのレベル設定と高速処理
4)ユーザ要求の迅速把握を促すUI(ユーザインターフェース)システム
104
1)ユーザ要求間の調整ルールのシステム化
ユーザ要求間の競合調整処理そのものは、調整ルールが設定されれば実現化は可能で
ある。しかしながら、調整ルールをシステマティックに定めるためには、本システムの
運用ポリシーとサービスレベルのメニュー設定が重要となる
2)複数衛星に関わる最適化問題の処理方式
各衛星の軌道とコマンドアップリンクと観測データダウンリンクに使用可能な地上
局、利用可能衛星リソースを考慮した最適な衛星を選択するための処理方式を今後検討
していくことになる。
3)提供プロダクトのレベル設定と高速処理
ユーザへのデータ提供の即応性を確保するためには、提供用プロダクト生成のための
データ処理の高速化も重要な課題となる。高次処理を行ったデータを提供する場合には
それだけ処理時間を要することとなるため、処理設備の性能も含めた高速化検討と合わ
せて提供用プロダクトの処理レベルの適正化が必要である。そのためには、ミッション
の内容とユーザへのサービスレベルを考慮した判断をしていくことになる。
4)ユーザ要求の迅速把握を促すUI(ユーザインターフェース)システム
事象発生~観測要求受付迄のリードタイムも全体所要時間の短縮においては重要と
なる。定常運用時も含めて、ユーザ要求を的確に把握し、具体的な観測計画へと反映可
能な情報の入力を促すUI(ユーザインターフェース)システムを具備することが、本
システムのユーザ獲得・拡大において重要となる。
105
4.4.4
運用システムの検討
4.4.4.1
運用システムの構成
運用方法の検討結果を受けて、運用システムの構成(案)を図 4.4-19 に示す。
図 4.4-19 運用システム構成(案)
106
4 調査研究の今後の課題及び展開
本調査研究は 3 年計画で進めており、1年目の本年度は当初計画通り、複数衛星連携シス
テムの有効性整理及びコンセプト構築を実施した。次年度の計画として、設定したコンセプ
トに対し具体的なシステム構築検討を進める予定である。システム実現化の検討の実施に当
たり、ミッションの絞込みが課題である。リモートセンシング分野でのニーズ分析に加え、
本システムのプロジェクト化、更には事業化・産業化のシナリオを構築した上で、ミッショ
ンの具体化を実施する。
次年度以降に実施する予定の内容を以下に示す。
(1)
(2)
(3)
(4)
複数衛星連携システムの最新動向調査
・
国内外の最新動向及びビジネスモデル事例などの調査
・
複数衛星連携システムのニーズ分析の深堀
・
コンセプトの絞込み、ミッション要求の整理
複数衛星連携システムの実現化検討(技術課題に対する解決策)
・
実現化における技術課題の深堀及びその解決策に関する検討
・
自動群制御、ネットワーク、センサ観測など要素技術の動向調査及び検討
複数衛星連携システムのシステム構築検討
・
軌道・運用シーケンス、全体システム構成の具体化
・
ミッション・衛星システム、運用システムなどのシステム構築検討
・
本システムに対する有効性解析及びシミュレーション検討
システム開発構想の具体化
・
複数衛星連携システムの研究開発・事業化・産業化シナリオの構築
・
技術課題解決のための技術開発計画の立案
・
複数衛星連携システムの開発計画の立案
107
参考文献
各章で使用されている参考文献をまとめて記述する。
第1章
1-1)
Futron HP
http://www.futron.com/
1-2)
RapidEye HP
http://www.rapideye.de/
1-3)
“Commercial Remote Sensing in a Global Context: Trends from Outside the U.S.”
http://www.crssymposium.com/program/Presentations/Biedermann.pdf
1-4)
OHB Systems HP
http://www.ohb-system.de/main-company.html
1-5) (株)日本デジコム
http://www.digicomnet.co.jp/
1-6)
Iridium Satellite LLC HP
http://www.iridium.com/
1-7)
Orbcomm HP
http://www.orbcomm.co.jp/service/index.html
1-8)
O3b Networks HP
http://www.o3bnetworks.com/
1-9)
idirect HP
http://www.idirect.net/
1-10) State of telecom industry in Pakistan
http://telecompk.net/
1-11) (株)日本スペースイメージング HP
http://www.spaceimaging.co.jp/
1-12) Thales Alenia Space
http://www.thalesgroup.com/Markets/Space/Home/
1-13) CSA HP
http://www.asc-csa.gc.ca/eng/default.asp
1-14) Guy Séguin,et.al, “RADARSAT Constellation Project Status and Application to
Disaster Monitoring”2009 年 ISTS
1-15) DLR HP
http://www.dlr.de/en/desktopdefault.aspx
1-16) G.Krieger,“TanDEM-X:
A
Satellite
Formation
for
High-Resolution
SAR
Interferometry”
1-17) F.Kugler et.al. “Frequency Effects in Pol-InSAR Forest Height Estimation.”
1-18) G.Schreier et al. “Earth observation data payload ground segments at DLR for
GMES”
1-19) NASA HP
http://www.nasa.gov/
1-20) NASA Science HP
http://science.nasa.gov/
1-21) ESA HP
http://www.esa.int/esaCP/index.html
1-22) 国立天文台 川村氏 DECIGO ワークショップ 発表資料
http://www.icrr.u-tokyo.ac.jp/icrr-study/2006/05/Kawamura.pdf
1-23) DARPA Owen Brown 氏発表資料 F-6
http://www.innovatecalifornia.net/innovationase_material/Presentation_Brown
108
_April28.pdf
1-24) A.Moreira et.al,“TANDEM-L: MONITORING THE EARTH‘S DYNAMICS WITH INSAR AND
POL-INSAR“ http://elib.dlr.de/58372/1/Paper-Tandem-L-Pol-InSAR-2009.pdf
1-25) A.M.Baker, “Affordable SAR Constellations to Support Homeland Security”
1-26) THE MAPSAR MISSION: OBJECTIVE, DESIGN AND STATUS
http://www.obt.inpe.br/mapsar/XIISBSR_Paper.pdf
1-27) ASTER GDEM HP
http://www.ersdac.or.jp/GDEM/J/index.html
1-28) S. J. Thomas et.al. “Mapping Insect Defoliation Using Multi-Temporal LANDSAT
DATA”
http://nofc.cfs.nrcan.gc.ca/bookstore_pdfs/27754.pdf
1-29) G.Krieger, “The Tandem-L Mission Proposal: Monitoring Earth’s Dynamics with
High Resolution SAR Interferometry”
http://elib.dlr.de/58372/1/Paper-Tandem-L-Pol-InSAR-2009.pdf
1-30) D.Kim et.al, “Remote Sensing of Ocean Waves and CurrentsUsing AIRSAR
Along-Track Interferometry (ATI)”
http://airsar.jpl.nasa.gov/documents/workshop2002/papers/O2.pdf
1-31) NOAA “Synthetic Aperture Radar Marine User‘s Manual”
http://www.sarusersmanual.com/ManualPDF/NOAASARManual_FrontMatter.pdf
1-32) 「防災のための地球観測衛星システム等の構築及び運用の進め方について」、文部
科学省(平成 18 年 9 月)
http://www.mext.go.jp/b_menu/shingi/chousa/kaihatu/004/toushin/06103014.htm
1-33) JAXA EORC HP
http://www.eorc.jaxa.jp/
1-34) JAXA ALOS HP
http://www.jaxa.jp/projects/sat/alos/index_j.html
1-35) RESTEC HP
http://www.restec.or.jp/
1-36) D.Massonnet,
Cartwheel”
“Capabilities
and
Limitations
of
the
Interferometric
http://adsabs.harvard.edu/full/2000ESASP.450..251M
1-37) H.Runge et.al, “The Interferometric Cartwheel for Envisat,”
http://elib.dlr.de/11345/1/Cartwheel_for_Envisat_IAA.pdf
1-38) M.Zink et.al, “Interferometric Performance of a Cartwheel Constellation for
Terra-SAR L,”
http://earth.esa.int/workshops/fringe03/participants/574/paper_TSLCW_Fringe
_final.pdf
1-39) JAXA GCOM HP
http://www.jaxa.jp/projects/sat/gcom/index_j.html
1-40) ESA SMOS HP
http://www.smos.esa.int
109
http://www.esa.int/esaLP/ESAMBA2VMOC_LPsmos_0.html
1-41) ESA METOP HP
http://www.esa.int/esaLP/LPmetop.html
1-42) NASA OSTM HP
http://www.nasa.gov/mission_pages/ostm/main/index.html
1-43) ESA CryoSat HP
http://www.esa.int/esaLP/LPcryosat.html
1-44) JAXA HP
http://www.eorc.jaxa.jp/GPM/contents/system/dpr_j.htm
http://www.satnavi.jaxa.jp/project/gpm/index.html
http://www.jaxa.jp/press/2009/02/20090209_ibuki_j.html
1-45) http://www.hssts.org/index.html
1-46) http://grass.itc.it/grass70/manuals/html70_user/i.vi.html
1-47) http://oceancolor.gsfc.nasa.gov/REPROCESSING/SeaWiFS/R2/sea_tech.html
1-48) http://www.satnavi.jaxa.jp/project/alos/index.html
1-49) http://www.geoeye.com/CorpSite/
1-50) http://www.digitalglobe.com/index.php/86/WorldView-1
1-51) http://eo1.gsfc.nasa.gov/Technology/Hyperion.html
1-52) NASA Scientific and Technical Aerospace Report,
1-53)
http://www.sti.nasa.gov/Pubs/star/star0916.pdf
1-54) A.J.Swank et.al,“COTSAT Small Spacecraft Cost Optimization for Government
and Commercial Use”, AIAA Space 2009 Conference & Exposition, California, 2009
1-55) 金色一賢、中須賀真一ほか「フォーメーションフライトによる干渉合成開口レーダ
(InSAR) 地球観測ミッションの設計」電子情報通信学会技術研究報告宇宙・航行エレ
クトロニクス, Vol.101, No.654, pp. 29-36, 2002.
1-56) GLADIS Constellation Concept
http://code8100.nrl.navy.mil/programs/images/GLADIS-INTL-web-pub.pdf
1-57) CubeSat HP
http://www.cubesat.org/
1-58) StenSat HP
http://www.stensat.org/cubesatweb/index.htm
1-59) P-POD (Poly Picosatellite Orbital Deployer) HP
http://www.nasa.gov/mission_pages/smallsats/nsd_ppod1.html
1-60) CNES HP
http://smsc.cnes.fr/MYRIADE/GP_plateforme.htm
1-61) CNES HP
http://smsc.cnes.fr/PROTEUS/index.htm
1-62) SSTL HP
http://www.sstl.co.uk/
1-63) J.Hong et.al, “ Precision Formation Flying ” , Earth Science Technology
Conference, 2006.
1-64) P.Palmer et.al, “SPACECRAFT CONSTELLATION DEPLOYMENT FOR THE RAPIDEYE EARTH
110
OBSERVATION SYSTEM” (IAC-09-b4.3.11)
1-65) H.Braun et.al,“The German Way to SAR-Lupe, a Very High Resolution SAR”
第2章
2-1)
D. Cerutti-Maori et.al, “Performance analysis of multistatic configurations
for spaceborne GMTI based on the auxiliary beam approach”, IEE Proc.-Radar Sonar
Navig., Vol. 153, No. 2, April 2006
第3章
3-1)
C.Dorn et al., “Formation Flying Missions in a Wider Context”、2006.
3-2)
河野他、“フォーメーションフライト用画像センサの研究(第 2 報)”、2008、東
京大学荒川研究室
3-3)
H.Kunimori et al, “A Satellite Tracking Demonstration On Ground Using a 100mm
Class Aperture Optical Antenna for Space Laser Communication”, 2006.
3-4)
Carpenter, “Decentralized control of satellite formations”, 2002.
3-5)
G.A.Sohl et.al, “Distributed Simulation for Formation Flying Applications”,
2005.
111
-禁無断転載-
システム技術開発調査研究 21-R-5
「複数衛星連携システムに関する調査研究」
要旨
平成 22 年 3 月
作 成 財団法人機械システム振興協会
東京都港区三田一丁目 4 番 28 号
TEL 03-3454-1311
委託先 財団法人無人宇宙実験システム研究開発機構
東京都千代田区神田小川町二丁目 12 番地
TEL 03-3294-4834
112
© Copyright 2026 Paperzz