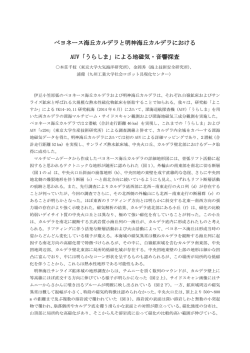
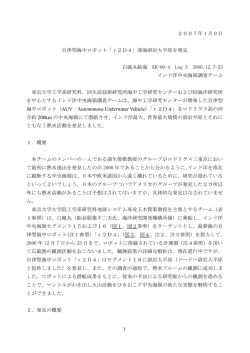
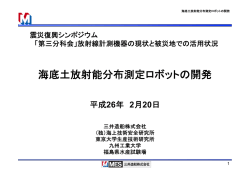
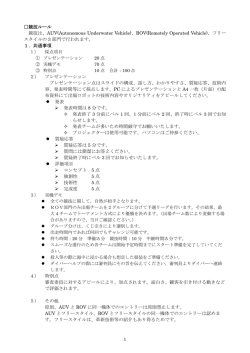
NT08-06 クルーズレポート 自律型海中ロボットによる カルデラ内部の観測方式の開発と熱水活動探索 平成 20 年 3 月 10 日(月) ~ 平成 20 年 3 月 28 日(金) 首席研究者 東京大学生産技術研究所 浦 環 1. 課題名 「自律型海中ロボットによるカルデラ内部の観測方式の開発と熱水活動探索」 Development of Strategy of Deployment for Exploration in Caldera of Underwater Volcano by Autonomous Underwater Vehicle and Intensive Survey of Hydro-Thermal Activity in Myoiin-sho Caldera 2. 目的 航行型 AUV(自律型海中ロボット:Autonomous Underwater Vehicle)およびホバリング型 AUV を機動的に利用してカルデラ内の熱水活動をおよび熱水性鉱床の観測調査手法の確立を目 指す。航行型 AUV は 2003 年から潜航を開始した「r2D4」で、ホバリング型 AUV は 2007 年か ら潜航を開始した「Tuna-Sand(TS と書く)」である。 潜航時間以外の時間においては、「なつしま」備え付けの SEABAT による海底測量をおこな い、詳細な海底地形図を作り、本航海における潜航計画に役立てるのみならず、今後の調査 観測計画に役立てる。 3. 期間および潜航行動 3.1 期間 平成 20 年 3 月 10 日(月) ~ 平成 20 年 3 月 28 日(金) 3.2 No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 参加者一覧表 氏名 浦 環 浅田 明 吉田 善吾 坂巻 隆 中谷 武志 後藤 薫 岡村 慶 上嶋 正人 中根 健志 永橋 賢司 横山 昌幸 小幡 忠正 大薮 祐司 山岡 紀夫 組織 所属・役職 生産技術研究所 教授 生産技術研究所 教授 生産技術研究所 技術職員 生産技術研究所 技術専門職員 大学院 工学系研究科 D2 大学院 工学系研究科 M1 海洋コア総合研究センター 准教授 地質情報研究部門 主任研究員 玉野艦船工場 水中機器部 課長補佐 玉野艦船工場 水中機器部 課長補佐 玉野艦船工場 水中機器部 課員 技術部 グループリーダー システム事業部 課員 システム技術部 課員 東京大学 東京大学 東京大学 東京大学 東京大学 東京大学 高知大学 産業技術総合研究所 三井造船(株) 三井造船(株) 三井造船(株) (株)シーテック (株)ユープラス (株)コスモ情報システム 1 3.3 潜航一覧表 表 3.3_1 潜航一覧表 r2D4 潜航番 号 年月日 潜航開始 海域 緯度 経度 潜航終了 時刻 時刻 潜航時 間 最大潜航 深度[m] 目的 結果 35 2008/3/15 ベヨネーズ海丘 31:57:05N 139:44:56E 11:26 13:05 1:38 686 熱水性鉱床調査 エ レ ベ ー タ 異 常 、 (高度異常)により垂直スラスタ浮上 36 2008/3/16 ベヨネーズ海丘 31:57:20N 139:44:45E 9:37 15:00 5:22 801 熱水性鉱床調査 完走 海 底 接 近 37 2008/3/17 ベヨネーズ海丘 31:57:17N 139:44:35E 11:04 17:00 5:56 920 熱水性鉱床調査 MTH ド ラ イ バ ー 容 器 浸 水 に よ り M ス ラ ス タ 停 止 。 コースタイムアウトにより NEWFLY が 20m 以深で終了したた め、デバラスト 38 2008/3/23 ベヨネーズ海丘 31:57:05N 139:44:42E 7:51 11:21 3:30 750 熱水性鉱床調査 予備 MTH ドライバー基板不具合によるスラスタ停止。音響 による強制緊急浮上 39 2008/3/25 明神礁 31:54:08N 139:55:03E 6:30 13:44 7:14 1050 熱水性鉱床調査 完走 目的 TS 潜航番 号 6 7 年月日 海域 潜航開始 緯度 経度 潜航終了 時刻 時刻 潜航時 間 最大潜航 深度[m] 2008/3/11 ベ ヨ ネ ー ズ 列 岩 31:54:23N 北部 139:54:16E 14:56 16:26 1:30 241.4 ROV 試験潜航 2008/3/12 ベ ヨ ネ ー ズ 海 丘 31:58:00N 北西部 139:43:30E 6:58 9:40 2:42 469.1 ROV 試 験 潜 (サンプリング) 139:53:36E 16:12 17:12 1:00 404.6 8 ベ ヨ ネ ー ズ 列 岩 2008/3/15 西部 31:53:30N 9 ベ ヨ ネ ー ズ 海 丘 2008/3/17 外輪山 北東部 31:58:42N 10 ベ ヨ ネ ー ズ 海 丘 2008/3/18 南東部 31:57:28N 139:44:42E 6:50 7:11 11 ベ ヨ ネ ー ズ 海 丘 2008/3/18 南東部 31:57:28N 139:44:42E 8:14 12 ベ ヨ ネ ー ズ 海 丘 2008/3/23 南東部 31:57:24N 139:44:51E 13 明 神 礁 カ ル デ ラ 2008/3/25 内輪山 南西部 31:53:02N 139:58:11E 139:44:51E 結果 一時潮流に流されたが良好 航 2 ROV 試験潜航 3 潮流に流された。光ファイバの通信が途切れる おおむね良好 499.9 ROV r2D4 特異点調査 0.21 260.7 AUV プ ロ グ ラ ム の 検 証 異常検出タスクが誤作動したため緊急浮上 および熱水活動調査 9:42 1:28 804.3 AUV プ ロ グ ラ ム の 検 証 良好に動作するも、チムニーらしき障害物に当たり前進 および熱水活動調査 できないため緊急浮上 13:57 15:09 1:12 735.1 AUV 熱 水 活 動 調 査 プログラム内にバグがあり、タイムアウトにより浮上 (CTDO センサ搭載) 15:54 18:15 2:21 897.5 AUV 熱 水 活 動 調 査 (CTDO センサ搭載) 傾斜 20 度の急勾配の斜面にてチムニーの噴煙を発見 6:54 7:52 0:58 2 #36 通信が途切れたため、timeout で浮上 4. 潜航海域 4.1 r2D4(浦) 4.1.1 ベヨネーズ海丘 ベヨネーズ海丘での r2D4 の潜航航路を以下に示す。 図 4.1.1_1 ベヨネーズ海丘での r2D4 の潜航航路 3 4.1.2 明神礁 明神礁での r2D4 の潜航航路を以下に示す。 図 4.1.2_1 明神礁での r2D4 の潜航航路参照 4 4.2 TS(中谷) 4.2.1 ベヨネーズ海丘 SSBL によって得られた、TS の潜航中の推定位置を示す。 図 4.2.1_1 ベヨネーズ海丘での TS の潜航航路 5 4.2.2 明神礁 図 4.2.2_1 のピンクで示されたところが調査海域である。 図 4.2.2_1 明神礁での TS の潜航航路 (左上:潜航計画 右下:潜航結果 ともに観測域のみを示している。 TUNA のログでは水深が 875-890m であったので実際は南に 20m 程度ずれた位置と推測される) 6 5. AUVおよび搭載機器の概要 5.1 r2D4(永橋) 東京大学生産技術研究所では 1984 年から中央海嶺探査を目的とした AUV プロジェ クトをスタートし、”R-One ロボット”及び”r2D4”、それぞれを開発した。 ”r2D4”は R-One ロボットを基に設計されているが、主な改良点は小型化及び 4,000m という潜航深度である。また、リチウム二次電池及びコンパクトな慣性航法装置 (INS)が搭載されているのも、その特徴である。主な仕様と搭載機器を表 5.1_1 に示す。 1.5kW のメインスラスタによりビークルは前進速度 3.3 ノットで航行できる。また、メイン スラスタは yaw 角制御の為に水平方向に 15 度まで首振りができる。ロールとピッチについ ては水平舵を調整することで最大ピッチ25度までとることが出来る。2 つの垂直スラスタは 海底への近距離接近及び、緊急浮上のために用いられる。 観測装置として 2 周波のサイドスキャンソーナー(100kHz 及び 500kHz)、インターフェ ロメトリソーナー及び下方 CCD カメラが地形調査のために常設されている。加えて、観測 によってはペイロードセンサーとして CTDO(水温、電気伝導度、溶存酸素量、透過度、 深度)、3 成分地磁気計、現場型化学分析装置 GAMOS が熱水地帯観測の為に装備が 可能である。これらの観測センサーのうちいくつかは前方のペイロード収納部に格納され る。 表 5.1_1 r2D4 の主要目、装備品一覧表 Dimensions (m) L4.4 * W0.96* H0.81 (hull) Weight (kgf) Max. Operating Depth (m) Max. Speed (kts) Duration (hrs) Power source 1,600(in air) / -5( in water) CPU For Navigation CPU For Observation Navigation System Observation Sensor 4,000 3.3 12 @ 3kts Lithium ion battery (Rechargeable, 150V, 120Ah) MOTOROLA PowerPC 233MHz OS: Tornado II ADVANTECH NS Geode 300MHz OS: Tornado II Inertial Navigation system: FOG, DPR sonar, Forward looking sonar, Altitude sonar, Depth sensor, GPS, Satellite comm., Acoustic comm., Wireless LAN comm. Side Scan Sonar, Interferometry Receive Sonar, CTDO, GAMOS 3-axis Terrestrial magnetism sensor, CCD camera 7 図 5.1_2 r2D4 の写真 5.2 TS(中谷) TS の写真を図 5.2_1 に、機器配置を図 5.2_2 に、仕様を表 5.2_1 に示す。実環 境でのロバスト性と母船上での取り扱いやすさを考慮してオープンフレーム構造 を採用している。本機は通信・映像用の光ファイバケーブルを装着することによっ て、遠隔操縦機(Remotely Operated Vehicle, ROV)として運用することも可能であ り、海況や調査目的によって操作方法を選ぶことができる。 特筆すべき特徴は、航法装置として高精度な慣性航法装置を搭載していることと、 そのドリフトの補正のために海底地形を基準とした測位機能を備えていることで ある。これによって GPS が使用できない水中環境においても地球座標系を基準とし た航行が可能となり、あらかじめ指定された位置に自動的に潜航することができる。 図 5.2_1 AUV TUNA-SAND (#8 潜航後に撮影) 8 表 5.2_1 TS の主要目、装備品一覧表 Vehicle Size Mass Max.speed Max.depth Duration Actuators Power Communication 1.1m(L)×0.7m(H)×0.7m(W) 240 kg 1.7 knot 1,500 m 4 hours Thrusters 220W × 4, 100W × 2 Ni-H Battery 50.4V 9Ah × 4 Wireless LAN, Fiber-Optic Comm.(ROV mode only) CPU (Main) NS Geode GX1-300MHz CPU (Comm. with sensors) NS Geode GX1-300MHz OS VxWorks Sensors Inertial Navigation System iXSea PHINS (FOG) GPS NovAtel OEM4-G2L RDI Navigator 600kHz Doppler Velocity Log Depth Mensor Series 6000 Echo sounder ×3 Obstacle Avoidance SSBL System Giken Payload Camera Hitachi KP-D20B(CCD) ×3 Lighting LED light board × 3 Bathymetry Imagenex 881a Profiler 675 kHz 図 5.2_2 機器配置図 9 5.3 5.3.1 観測用 Payload サイドスキャンソナー(浅田) 100kHz と 500kHz の作動周波数を持つ Klein System2000 サイドスキャンソーナーの 送受波器が r2D4 の両舷に装備され(図 5.3.1_1)、電源を投入すれば、海底からの高度 に従ってレンジ、感度調整も含めほとんど自動で海底の音響画像観測を行う。100kHz と 500kHz は同時に観測されるが、500kHz であれば海底に接近し高度 20m程度であれば、 およそ片側 50m、両側で 100m 程度の詳細な音響画像を観測することができ、50m の高度 となるとほとんど像を得ることができない。通常は、100kHz が観測の主体であり、高度 50m から 100m ぐらいで観測することが好ましい。最大で片側 400m、両側で 800m の音響画像 観測が行える。また、状況によっては海底のみならず、水中浮遊物質や熱水の流出現象 も観測されることもある。 図 5.3.1_1 r2D4 の側面図(右)、サイドスキャンソーナーの上下に配置された 3 つのハイドロホン で海底からのエコーの到来方向角を計測することによって海底地形を計測するシステム(左) 5.3.2 インターフェロメトリーソナー(浅田) 自律型海中ロボット r2D4 は 2003 年 7 月に建造され、海洋海嶺における熱水活動の観 測・探査を目的とした実用型の AUV である.全長 4m、潜行最大深度 4000m、航続時間 12 時間の性能を持つ。図 5.3.1_1 に示されるように、100kHz と 500kHz の作動周波数を持つ Klein System2000 サイドスキャンソーナーの送受波器を挟んで、アレイ間隔をおよそ 3 波長と 13 波長に拡張した L 字配列のハイドロホンを片側に 3 個ずつ AUV に装備した。L アレイ・インターフェロメトリシステムは、サイドスキャンソーナーが 100kHz の音響パルス波 を横方向の海底に向かって放射し、海底からの散乱エコーを L 字配列のハイドロホンで 受信し、位相差を計測することによって、時間領域で細かく分断された散乱波がどの方 向から到来したものであるかを計測し、海底の横断面地形を詳細に計測する。これまで は、直線状にアレイを配置する 2 個のアレイが基本形であり 7 波長まで間隔を拡げたもの があったが、L 字型に 3 個配置することにより、3 組の位相計測結果が得られるので到来 方向角を決定しあいまいな部分を除去する。 10 海面からのマルチビーム音響測深の場合、数 1000m の海底まで距離があり、各ビームが 広がり海底でのフットプリントが数 10m から数 100m にもなり水平分解能が著しく低下する。 一方、図 5.3.2_1 に示すように海中ロボットが海底付近まで潜航して海底直上からマッピ ングすれば最高の分解能が得られるという利点が得られる。 図 5.3.2_1 明神礁カルデラ内をソーナーで地形計測する r2D4 11 5.3.3 GAMOS(岡村) GAMOS は、r2D4 などの潜水船や CTD-RMS 等の海洋観測機器に搭載し熱水プルーム中 の溶存マンガン濃度を現場で連続的に測定し、濃度の空間分布を把握する現場型化学 成分分析装置である。測定原理はフロースルー式化学発光法に基づいている。試料を3 又は4種類の化学発光試薬と混合しマンガンと特異的に反応させると目標元素濃度に依 存した発光を示す。この発光強度を測定することにより両元素の定量が可能となっている。 GAMOS は1)分析部:試薬送液部および溶液切り替えバルブを内蔵した油付け被圧容器、 2)制御部:制御ユニット及び検出器を内蔵した耐圧容器からなる。DC24V 電源は r2D4 か ら供給する。測定は連続的に行われ、一秒毎の観測値がデータロガーに記録される。測 定可能範囲は1~4,000nM となっている。 図 5.3.3_1 装置の写真 12 5.3.4 サブボトムプロファイラ(SBP, DAI-PACK)の概要(上嶋正人、西村清和、岸 本清行) 従来から、水平分解能等の改善を目的とし、サブボトムプロファイラやサイドスキャンソ ナーを海底近傍で曳航する深海曳航式探査システム(ディープ・トウ)が開発され実用化 されている。しかしながら、海底地形が急激に変化する場合は、曳航体を海底へ十分近 づけることができず、探査システムの分解能を上げることはできない。また、深海曳航法で は曳航体を縦横に移動させることは難しく、一定の範囲を高密度に調査することは困難 である。このような問題を解決する手段として、有索式無人探査機(ROV: Remotely Operated Vehicle)や自律式無人探査機(AUV: Autonomous Underwater Vehicle)を 利用した探査が考えられる。ROV、AUV によれば、長距離の航走は困難であるが、一定の 調査範囲内を縦横に移動可能であるので、平面的な高密度マッピングが可能となる。そ こで、ROV、 AUV に搭載して使用可能な音響探査システムとして、深海底構造・微地形探 査パッケージ(DAI-PACK: Deep sea Acoustic Imaging Package)を開発した。本システ ムはコンパクトな深海用サブボトムプロファイラ(SBP)および深海用サイドスキャンソナー (SSS)から構成されるが、本航海では SBP のみを使用した。 SBP の構成 本システムの SBP は、低周波の音響パルス(約 10kHz)を用い海底下数 10m の堆積物 の成層構造を詳細に調査するものである。SBP の主要部分は米国 Syquest 社の StrataBox を使用し、それを深海仕様に改造している。StrataBox はチャープソナーのよ うな信号処理を行っていない従来型の SBP であるが、エレクトロニクスユニットがコンパクト で、小型バッテリーで作動可能という特徴を備える。 SBP は小型軽量な深海トランスデュ ーサとエレクトロニクスユニットから構成され、ノート PC 等でデータ収録・表示を行う。エレ クトロニクスユニット、ノート PC 等は耐圧水深 6,000m のアルミ製耐圧球(外径約 38cm、空 中重量約 25kg)に収納されている。SBP の仕様概要を表 1 に示す。 本システムは電源を内蔵したオフラインシステムであり、AUV のみならず、ROV、深海潜 水船、深海曳航体等の各種ビークルに容易に搭載可能である。 AUV ではプログラムされ た調査が主体になりドップラソナーにより海底をトラッキングしての微細な位置変化の検 出が可能になるので、一段と高度な調査が期待される。 r2D4 への SBP の搭載 SBP は本体耐圧球と深海トランスデューサの二つのコンポーネントから構成される。本 体耐圧球は r2D4 の前部のペイロード収納スペースに取り付けた(図 5.3.4_1)。深海トラ ンスデューサは防振ゴムを装着した台座に取り付け、r2D4 の中央付近下部に、 r2D4 の 底面よりやや高い位置に取り付けられた(図 5.3.4_2、_3)。これらの取り付け・調整は、出 航前に三井造船玉野事業所で行われた。 13 表 5.3.4_1 深海用サブボトムプロファイラの仕様概要 測深レンジ 5, 10, 20, 40, 80, 150m 地層探査分解能 約 6cm(レンジ 10m の場合)、80m レンジでは 0.5m 程度 最大探査深度 海底下 40m(底質に依存) 測深精度 0.5%以上 浅海部のリミット 最浅 2.5m(底質に依存) 送信レート 最大 10Hz(水深と動作モードに依存) データの保存 ODEC フォーマット、SEG-Y フォーマット 周波数 10kHz 送信出力レベル 300W(パルス) 入力電源 10-30V DC、 消費電力 8W 図 5.3.4_1 r2D4 に取り付けた DAI-PACK 耐圧球 14 図 5.3.4_2 r2D4 上の深海トランスデューサの取り付け位置(左)および 台座に取り付けた深海トランスデューサ(右) 図 5.3.4_3 r2D4 底部の SBP トランスデューサ 中央のやや大きな丸い部分がトランスデューサ の底面、前後のやや小さい円筒および丸い穴はバラストウエイトおよびその穴を示す。 15 6. 潜航の概要 6.1 r2D4(永橋) 6.1.1 第35潜航 実施日 2008 年 3 月 15 日(土) 潜航点 ベオネーズ海丘(着水点 N31:57:05 E139:44:56) 天候 曇り時々雨 風速10~12m/s スケジュール 10:00 r2D4 を格納庫から甲板へ引き出し 11:30 着水、潜航開始 12:30 揚収完了 搭載ペイロード GAMOS、SSS、IFS、三成分地磁気計、CTDO 潜航概要 エレベータの不具合により、ピッチ制御が効かない状態となっ た。これにより海底に近づきすぎた結果、ロボットは危険と判断 し、バラスト投下し、垂直スラスタを使って浮上した。 最大潜航深度 686m 深度プロファイル図 図 6.1.1_1 参照 図 6.1.1_1 第35潜航の深度プロファイル 6.1.2 第36潜航 実施日 2008 年 3 月 16日(日) 潜航点 ベオネーズ海丘(着水点 N31:57:20 E139:44:45) 天候 晴れ 風速 3~8m/s スケジュール 08:00 r2D4 を格納庫から甲板へ引き出し 09:30 着水、潜航開始 15:30 揚収完了 搭載ペイロード GAMOS、SSS、IFS、三成分地磁気計、CTDO 16 潜航概要 計画コースデータを完走。一定高度航行(100m)にて 5 時間 22 分潜航した。 最大潜航深度 801m 深度プロファイル図 図 6.1.2_1 参照 図 6.1.2_1 第36潜航の深度プロファイル 6.1.3 第37潜航 実施日 2008 年 3 月 17日(月) 潜航点 ベオネーズ海丘(着水点 N31:57:17 E139:44:35) 天候 晴れ 風速 1~4m/s スケジュール 09:00 r2D4 を格納庫から甲板へ引き出し 11:00 着水、潜航開始 17:00 揚収完了 搭載ペイロード GAMOS、SSS、IFS、三成分地磁気計、CTDO 潜航概要 一定高度航行(最低高度40m)の観測を計画通り終え、浮上 中の深度250mにおいて、メインスラスタが停止するトラブルが 発生し、バラスト投下して緊急浮上した。潜航時間は 5 時間 56 分。揚収後の調査で、メインスラスタドライバ用耐圧容器に浸水 が確認された。また、CTDO の動作不能が着水前に確認され、 データが収集出来なかった。 最大潜航深度 920m 深度プロファイル図 図 6.1.3_1 参照 17 図 6.1.3_1 第37潜航の深度プロファイル 6.1.4 第38潜航 実施日 2008 年 3 月 23 日(日) 潜航点 ベオネーズ海丘(着水点 N31:57:05 E139:44:42) 天候 晴れ 風速1~4m/s スケジュール 06:00 r2D4 を格納庫から甲板へ引き出し 08:00 着水、潜航開始 12:30 揚収完了 搭載ペイロード SBP、SSS、IFS、三成分地磁気計、 簡易型 CTDO、硫化水素計 潜航概要 第37潜航で故障となった CTDO を取り外し、簡易型 CTDO と 硫化水素計を搭載した。潜航開始後、音響測位結果から r2D4 が予定コース通りに潜航していないことが確認され、音響通信 装置にて浮上コマンドを発信。ロボットは深度700mでバラスト 投下し、浮上した。潜航後の調査で、メインスラスタドライバの 不具合でメインスラスタが停止していることが判明した。 最大潜航深度 750m 深度プロファイル図 図 6.1.4_1 参照 18 図 6.1.4_1 第38潜航の深度プロファイル 6.1.5 第39潜航 実施日 2008 年 3 月 25 日(火) 潜航点 明神礁(着水点 N31:54:08 E139:55:03) 天候 晴れ 風速 0.5~3m/s スケジュール 05:00 r2D4 を格納庫から甲板へ引き出し 06:30 着水、潜航開始 14:30 揚収完了 搭載ペイロード GAMOS、SSS、IFS、三成分地磁気計、 簡易型 CTDO、硫化水素計 潜航概要 計画コースデータを完走。一定高度航行(最低高度40m)にて 7時間14分潜航した。 最大潜航深度 1050m 深度プロファイル図 図 6.1.5_1 参照 図 6.1.5_1 第39潜航の深度プロファイル 19 6.2 TS(中谷) 本航海は、TS にとって外洋における初めての航海であった。表6.2_1 に示す ように計 8 回の潜航を行った。前半は光ファイバケーブルの通信切断トラブル、後 半はプログラムのバグによる緊急浮上などが相次いたが、最後の潜航となった#13 潜航では r2D4 が発見した特異点の海底において、1 時間にわたって詳細な測深と ビデオ撮影を行うことができた。事項以降に各潜航のログを示す。 表6.2_1明神礁での TS 潜航一覧 海域 潜航番号 年月日 6 7 8 9 10 11 12 13 2008/3/11 2008/3/12 2008/3/15 2008/3/17 2008/3/18 2008/3/18 2008/3/23 2008/3/25 ベヨネーズ列岩 北部 ベヨネーズ海丘 北西部 ベヨネーズ列岩 西部 ベヨネーズ海丘 外輪山 北東部 ベヨネーズ海丘 南東部 ベヨネーズ海丘 南東部 ベヨネーズ海丘 南東部 白嶺鉱床テラス 明神礁カルデラ 内輪山 南西部 緯度 31_ 54.384 N 31_ 58.0 N 31_ 53.5 N 31_ 58.7 N 31_ 57.463 N 31_ 57.463 N 31_ 57.4 N 31_ 53.033 N 潜航開始 経度 139_ 54.27 E 139_ 43.5 E 139_ 53.6 E 139_ 44.85 E 139_ 44.707 E 139_ 44.707 E 139_ 44.85 E 139_ 58.181E 時刻 14:56 6:58 16:12 6:54 6:50 8:14 13:57 15:54 潜航終了 時刻 16:26 9:40 17:12 7:52 7:11 9:42 15:09 18:15 潜航時間 1:30 2:42 1:00 0:58 0.21 1:28 1:12 2:21 最大潜航 深度(m) 241.4 469.1 404.6 499.9 260.7 804.3 735.1 897.5 表6.2_2潜航目的と結果 潜航番号 6 7 8 9 10 11 12 13 目的 ROV 試験潜航 ROV 試験潜航2 (サンプリング) ROV 試験潜航3 ROV r2D4 #36 特異点調査 AUV プログラムの検証および熱水活動調査 AUV プログラムの検証および熱水活動調査 AUV 熱水活動調査(CTDOセンサ搭載) AUV 熱水活動調査(CTDOセンサ搭載) 結果 一時潮流に流されたが良好 潮流に流された。光ファイバの通信が途切れる おおむね良好 通信が途切れたため、timeoutで浮上 異常検出タスクが誤作動したため緊急浮上 良好に動作するも、チムニーらしき障害物に当たり前進できないため緊急浮上 プログラム内にバグがあり、タイムアウトにより浮上 傾斜20度の急勾配の斜面にてチムニーの噴煙を発見 6.2.1 第6潜航 <2008/03/11 #6 潜航後 会議資料より抜粋> 潜航名:#6 (試験潜航 ベヨネーズ列岩北部:北緯 31.9064 度、東経 139.9045 度) 潜航日:2008 年 3 月 11 日 【目的】 (a) 各種プログラムの動作確認 (b) プロファイラのゲイン調整 (c) 潮流による影響を把握 【潜航結果】 潜航時間: 1h 30m (in 14:56:36 out 16:26:22) 最大深度:241.4(m) 20 0 (m) 50 100 150 Depth Bottom(depth+alt) 200 250 0 3600 7200 (sec) 図 6.2.1_1 #6 潜航における TUNA の深度と高度 30 25 20 15 10 5 0 -10 0 10 20 30 40 -5 図 6.2.1_2 #6 潜航における TUNA の航跡図 (海底ミッション中) ( 青:測深時(10m 高度, 8m 間隔)、ピンク:撮影時(1.5m 高度, 3m 間隔) ) 6.2.2 第7潜航 <#7 潜航後 会議資料より抜粋> 潜航名:#7 (ベヨネーズ海丘北西部 基準点: 北緯 31 度 58.0 分、東経 139 度 43.5 分) 潜航日:2008 年 3 月 12 日 【潜航目的】 (a) 昨日からのプログラム変更点の動作確認 (航路点に heading を向ける、 撮影時は高 度 2m) (b) 海底調査、サンプリング (c) 最大潜航深度の更新 【潜航結果】 潜航時間: 2h 42m (in 6:58:36 out 9:40 通信停止 7:27 ログ停止 9:11) 21 最大深度:469.1(m) (8:43:57) 図 6.2.2_1 #7 潜航における TUNA の深度 (通信が途切れたのは 4500 秒頃) 図 6.2.2_2 #7 潜航における TUNA の電源電圧 6.2.3 第8潜航 <#8 潜航後 会議資料より抜粋> 潜航名:#8 (ベヨネーズ列岩西部 基準点: 北緯 31 度 53.5 分、東経 139 度 53.6 分) 潜航日:2008 年 3 月 15 日 【潜航目的】 (a) 通信トラブル(#7)後の試験潜航 (b) プログラム変更点の動作確認 (航路点間の timeout、通信切断時の timeout) (c) 異常検出プログラムの動作確認 【潜航結果】 潜航時間: 1h 00m (in 16:12:17 out 17:12:44) 最大深度:404.6(m) (16:30:26) 22 【着水について】 3 度目の潜航ということもあり、手順よく行われた。 (i) バラスト着脱テスト (ii) バラスト装着 (iii) Dive スイッチ ON、 LED ライト確 認 切り離しの確認後、Surge100N で本船から離れた。 潜航速度 38(cm/sec) 浮上速度 26(cm/sec) 100m を 4 分 20 秒 100m を 6 分 20 秒 Timeout による浮上 高度 10m からの測深 Video 撮影(高度 2m、 サメ多し) 図 6.2.3_1 #8 潜航における TUNA の深度 6.2.4 第9潜航 <#9 潜航後 会議資料より抜粋> 潜航名:#9 (ベヨネーズ海丘北東部外輪山 基準点: 北緯 31 度 58 分 42 秒、東経 139 度 44 分 51 秒) 潜航日:2008 年 3 月 17 日 【潜航目的】 (a) r2D4 #36 潜航(3 月 16 日)で Mn の反応があった地点で熱水チムニーを発見する (b) 最大潜航深度の更新 【潜航結果】 潜航時間: 58min (in 6:53:37 out 7:52:22) 最大深度:499.9(m) (7:14:19) 23 【光ファイバについて】 (潜航前) ・ 潜航前に通信、メディア ch1 が途切れた。無線 LAN で通信を行ったのち、光ファイバ を用いた通信接続を再度試みたところ、回復した。#8 潜航まで調子がわるかった ch2 は良好に映っていた。 (潜航中) ・ #9 と同様に水深 200m を越えるあたりから通信、メディアが途切れることが頻発した。 表 6.2.4_1 水深とケ ーブル 【その他】 ・ ケーブル繰り出し量 潜航時は深度プラス 10~30m 程度であった。海域が深いた め、ケーブル量の繰り出し量を制限した。潜航中の TUNA の pitch は概ね頭下げ約 10deg であり、それを越えるとケーブ ルに引っ張られるため、潜航速度が遅くなった。本日は、風 が穏やかであり、流れも比較的弱かったため、TUNA はほとん ど流されなかった。 水深(m) ケーブル(m) 34 50 50 70 105 120 160 180 235 250 300 320 360 380 440 450 図 6.2.4_1 #9 潜航における TUNA の深度 24 図 6.2.4_2 潜航後に行ったケーブルエンドの補強 6.2.5 第10潜航<#10 潜航後 会議資料より抜粋> 潜航名:#10 (ベヨネーズ海丘南東部基準点: 31-57.463 N、139-44.707E) 潜航日:2008 年 3 月 18 日 【潜航目的】 (c) AUV モードでの潜航(安全索つき) (d) ハイパードルフィン#745 潜航で発見したチムニーの観測とその周辺調査 (e) 最大潜航深度の更新 【潜航結果】 潜航時間: 21min (in 6:49:58 out 7:11) 最大深度: 260.7(m) (6:58:36) 【異常検出タスクの誤作動による緊急浮上について】 異常検出タスクの起動を忘れていたため、潜航開始後に異常検出タスクを起動した。プ ログラム中にバグがあり、起動時に判定値が初期化されずに異常判定が行われていた。そ のため、場合によって誤って異常判定されることあった。バグは#11 潜航後に直されてい る。 この現象は水槽実験において 1、 2 度確認されていたため、バラスト装着前に起動する ことにしていたが、今回は手順マニュアルを逸脱してしまった。既にバグは解消されてい るが、今後もバラスト装着前に起動することを徹底する。 着水前の手順は 25 (i) 異常検出プログラムの起動 (i) バラスト着脱テスト (ii) バラスト装着 (iv) Dive スイッチ ON、 LED ライト確認 とする。 6.2.6 第11潜航 <#11 潜航後 会議資料より抜粋> 潜航名:#11 (ベヨネーズ海丘南東部基準点: 31-57.463 N、139-44.707E) 潜航日:2008 年 3 月 18 日 【潜航目的】 (f) AUV モードでの潜航(安全索つき) (g) ハイパードルフィン#745 潜航で発見したチムニーの観測とその周辺調査 (h) 最大潜航深度の更新 【潜航結果】 潜航時間: 1h 28m (in 8:13:47 out 9:42:09) 最大深度: 804.3(m) (8:50:28) 【推定位置】 潜航中、SSBL がほとんど受からなかった。手帳のログによると潜航中は深度 500m まで、 浮上時は深度 300m から時々取れていた。前日に行われた R2D4 運用時には良好に取得でき ていたことを考慮すると、TUNA の垂直スラスタのノイズが大きい、ケーブルの取り回しか ら常に母船の船尾方向に位置する、潮流に流されて母船から水平距離で 300m 以上離れて いたなどが原因であったと考えられる。 図 6.2.6_1 深度高度プロファイル 26 図 6.2.6_2 海底付近における深度高度と前進速度 27 図 6.2.6_3 #11 潜航中に撮影されたビデオ映像のスナップショット 6.2.7 第12潜航 <#12 潜航後 会議資料より抜粋> 28 潜航名:#12 (ベヨネーズ海丘南東部 白嶺鉱床テラス 基準点: 31-57.40 N、139-44.85E) 潜航日:2008 年 3 月 23 日 【潜航目的】 (i) AUV モードでの潜航(安全索つき) (j) Way point track を行う (k) 熱水活動の有無について調査する(ビデオ撮影および CTDO センサ) 【潜航結果】 潜航時間: 1h 12m (in 13:56:44 out 15:09:19) 最大深度: 735.1(m) (14:30:21) ・航路点に到達したかの判定条件 観測モード中、鉛直方向は高度 or 深度制御で、水平方向は 2 次元上で位置制御を行い ながらライントラッキングを行っている。あらかじめ設定した航路点に到達したかの判 定条件は、水平面上において現在位置から航路ラインの始点と終点を結んだ直線に垂線 を下ろし、その足が終点(正確には[終点-許容範囲])を越えているかで行っていた。 そのために初期位置が終点を越えた領域にあった場合は、既に終点に到達していると 判定されることになる。今回の潜航では、1 本目は南から北に向けた航路ライン( -15, -20.0)→( -15.0, 20.0)に設定されており、初期位置がそれよりも北側であったため、 観測開始時に既に到達していると判定された。そして、すぐに( -5.0, 20.0)へ向かい 始めたが、タイムアウト(3 分間)以内に到達することができずに浮上した。 【その他】 ・ 激しい電腐 主容器の前面鏡板に斑点状に腐食が発生している。#11 潜航(白嶺鉱床で 2 度衝突)後 に気がついたため、ph の低い海域に潜航させたためと考えていたが、容器内部でアー スが容器に落ちている可能性がある。航海後に主容器をあけて原因を究明するととも に、タフラムをかけ直しまたは交換などの対策が必要である。 29 図 6.2.7_1 深度高度プロファイル 図 6.2.7_2 CTDO センサの取付け 6.2.8 第13潜航 <#13 潜航後 会議資料より抜粋> 潜航名:#13 (明神礁カルデラ内輪山南西部 基準点: 31-53.033 N、139-58.181E) 潜航日:2008 年 3 月 25 日 【潜航目的】 30 (l) AUV モードでの潜航(安全索つき) (m) Way point track を行う (n) 熱水活動の有無について調査する(ビデオ撮影および CTDO センサ) 【潜航結果】 潜航時間: 2h 20m (in 15:54:12 out 18:15:07) 最大深度: 897.5(m) (16:31:46) 【イベントログ】 13:35 TUNA 起動、プログラムの転送を開始 14:15 プログラム転送完了、時刻あわせ、電源 OFF 14:45 TUNA 引き出し、A フレーム振り出し。 14:55 TUNA 起動。 15:00 海域に到着。静定開始(GPS の受信がよくない) 15:15 PHINS が南に大きくドリフトを始めたので PHINS 再起動 15:40 動作確認開始。 15:45 静定作業終了。着水作業開始(バラスト着脱テスト、バラスト装着)。 15:51:32 DiveMission プログラム 「待機モード)」開始、LED 点灯を確認 15:54:12 着水 (無線 LAN を用いて AUV として作業を行った) 15:54:34 DiveMission プログラム 「潜航モード」に遷移 16:05:12 通信が途切れた(水深 347m)、そのまま AUV モードで潜航 16:28:31 DiveMission プログラム 「静定モード」に遷移、Front バラスト投下 (4 分間のタイマにより) 16:32:31 DiveMission プログラム 「観測モード」に遷移(目標高度 15m) 16:39:30 1 つ目の航路点に到達して測深を開始。 16:54:29 P8 に到達。目標高度を 15m から 5m に変更。 16:54:45 ビデオ撮影開始。 17:27:54 主電源が 48V を切ったためにスラスタ停止で緊急浮上開始(P23→P24 移動中) 18:08 光ファイバの通信ラインが回復(水深 150m) 18:15:07 海面に浮上 18:15:42 GPS が有効になり PHINS 位置補正 18:16:32 クレーンにより揚収 【推定位置】(図 6.2.8_1 ~図 6.2.8_4 参照) これまでの潜航通り、水深が深くなると SSBL が受信できなくなった。通常の浮上では 垂直スラスタを使用して浮上するが、本潜航では電圧降下による緊急浮上が発動されたた め、垂直スラスタを停止させたまま浮上した。そのため、ノイズが減り S/N 比が向上して 浮上開始直後から SSBL が安定して取れた。 31 無索化を進めるには、SSBL によって確実に位置を把握することが必要不可欠である。今 後、定期的に垂直スラスタを停止しながらミッションを行う、または垂直スラスタに改良 を加えてノイズを低減するなどの対策が必要である。 <海底観測> 残念ながら電池切れの電圧降下により全ての航路点をまわることはできなかったが、26 点中 23 点まで航路点をまわることができた。平均斜度が 30 度を越える斜面において、高 度 2.5m から安定したビデオ撮影を行えたことは特筆すべき成果であろう。今後、海底地 形を用いた測位手法(Terrain Navigation)を TUNA に実装し、リアルタイムに正確な位置 補正ができるようになれば、音響通信などの外部支援受けずに毎回同一地点に観測に行く ことができることが期待され、航行型 AUV が発見した特異点のピンポイント調査やチムニ ーの経年変化の観測に役立つものと考えられる。 【その他】 ・ 激しい電食 #11 潜航以降、電食の進行が早まっている。大事を取って本日以降の潜航をキャンセ ルする。潜航後の調査により、カメラ容器内、および主容器内でフレームに回路が短 絡しており、同容器のタフラムが斑点状にはげて電食が激しく進んでいることがわか った。研究所に戻り次第、早急に対策を検討する。 ・ 浮上用バラスト クレーンによる揚収時に浮上用バラストが落ちた。浮上開始時に電磁石に通電をス トップすることによってバラストリリースされているが、吸着して外れなかったよう である。装着前に紙やすりで表面を荒くしていたが、これまでの潜航時に使用したバ ラストに比べて錆びが少なかったことも要因のひとつであろう。今後は表面に溝を彫 る、やする程度を更に荒くするなどの対策を講じる。 32 図 6.2.8_1 深度高度プロファイル 図 6.2.8_2 INS による TUNA の推定位置 33 図 6.2.8_3 INS の推定位置精度の標準偏差の推移 図 6.2.8_4 姿勢角変化 34 図 6.2.8_5 海底付近における深度高度と前進速度 図 6.2.8_6 海底付近における高度制御 35 図 6.2.8_7 海底の様子(水深 875-890m) 左上:ウミヘビ?! 左下:岩(前方カメラ) 右上:チムニーの噴煙 右下:岩(斜め下カメラ) (下段の 2 枚は、同一の岩を別時刻に撮影したものである) 図 6.2.8_8 SSBL データによる航跡推定 (左上:潜航計画 右下:潜航結果 ともに観測域のみを示している。 TUNA のログでは水深が 875-890m であるので実際は南に 20m 程度ずれた位置と推測される) 36 7. 7.1 ペイロードによる観測 サイドスキャンソナーの観測(浅田) サイドスキャンソーナーによる観測は、インターフェロメトリソーナーの観測と同時に行 われ、観測データの概要は表1に示す。Klein System2000 サイドスキャンソーナーを使 用しており、周波数は 100kHz と 500kHz の送受波器が組み込まれ、同時に観測されたが。 高度が 50m 以上がほとんどであり、100kHz のデータが主な観測結果である。CARIS-SIPS を使ったモザイク結果を図 7.1_1、7.1_2に示す。 表 7_1 サイドスキャンソーナー観測データ一覧表 ベヨネーズ列岩カルデラのサイドスキャンソーナー海底音響画像観測デ ータ ・ 3 月 15 日 11:52:50-12:05:45、 13 ファイル、 0.1 GB ・ 3 月 16 日 09:52:30-14:41:16、 248 ファイル、 2.9 GB ・ 3 月 17 日 06:55:11-16:06:34、 246 ファイル、 2.9 GB ・ 3 月 23 日 08:17:35-08:22:48、 6 ファイル、 0.07 GB 明神礁カルデラのサイドスキャンソーナー海底音響画像観測データ ・ 3 月 25 日 06:41:19-13:32:05、 351 ファイル、 4.1 GB 図 7.1_1 ベヨネーズカルデラ北部の 3 月 17 日の r2D4 サイドスキャン画像(暫定処理、南北 1440m ×東西 4140m、図3と同一潜航) 37 図 7.1_2 明神礁カルデラの 3 月 25 日 r2D4 サイドスキャン計測画像(暫定処理、東西 7000m× 南北 5500m) 7.2 インターフェロメトリーソナーによる観測(浅田) (1) r2D4 インターフェロメトリ海底地形観測結果 5回の潜航観測、ベヨネーズカルデラ北部で 4 潜航、明神カルデラで 1 潜航の地形計測 を行った。 表 7_2 インターフェロメトリ観測データ一覧表 ベヨネーズ列岩カルデラのインターフェロメトリ海底地形観測データ ・ ・ ・ ・ 3 月 15 日 11:52:50-12:05:45, 6 ファイル, 2.8 GB 3 月 16 日 09:52:30-14:41:16,123 ファイル, 57.2 GB 3 月 17 日 06:55:11-16:06:34,124 ファイル, 57.2 GB 3 月 23 日 08:17:35-08:22:48, 3 ファイル, 1.3 GB 明神礁カルデラのインターフェロメトリ海底地形観測データ ・ 3 月 25 日 06:41:19--13:32:05, 176 ファイル, 82.3 GB 3 月 17 日の潜航は、主な目的がベヨネーズ列岩カルデラ海底地形をマッピングする観 測であったので、まず、サイドスキャンソーナーのモザイク図を作成した(図 7.1_1)。また、 3 月 25 日のサイドスキャンソーナー明神礁カルデラのモザイク結果を図 7.1_2 に示す。カ ルデラ内の急峻な崖地形のためサイドスキャンソーナーの一次処理によるモザイク図で は、画像を得られないことも多く、画像も鮮明でなく、水平位置の精度も劣化し、海底地 38 形の特徴を読み取ることが難しい。しかし、サイドスキャンのデータから、インターフェロメト リ海底地形観測データの品質を推察することができる。 3 月 17 日のベヨネーズカルデラ北部の r2D4 サイドスキャン画像から海底地形計測の 品質が高い観測結果であると推定され、これについて海底地形解析の一次処理を行っ た。インターフェロメトリの弱点である真下付近が計測できない、精度が劣化する、という 現象がみられるが、東西 8 測線(南北 200m 間隔)を使って大きな歪無く広範囲の地形計 測が行われた(図 7.2_1、図 7.2_2、図 7.2_3)。 SeaBat8160 地形グリッドとの地形相関から位置ずれを計算し、r2D4 のリアルタイム測位 に対し北に 0.0007 度、東に-0.0010 度の補正を行って位置を修正した。 インターフェロメトリ地形計測の水深は、 (r2D4 の潜航深度)+(r2D4 からのスワス測深)、 として求め、潮汐補正は行っていない。 インターフェロメトリ地形計測において、真下の水深は、エコーの最初の到達時間から 求めた。これに対し、今後は、r2D4 の高度計測ソーナーの結果と比較を行うこととした い。 これまで 3 波長と 15 波長の 2 組のインターフェロメトリ位相差に波長の整数倍のバイアス を加えて、地形計測を行ってきた。今回は、3 波長の計測の方が総じて良好であったので、 主たる地形計測には 3 波長計測を用い、15 波長側は未知数であるバイアス値を計測す るのに使用した。今回は、新たに近傍の海底傾斜を推定する、この時に 3 波長と 15 波長 の 2 組を用いて、誤差が最小になるバイアス値を求めた。その外側については、3 波長と 15 波長の計測水深が 2.5m 以下の差に収まる 3 波長計測結果を水深として採用するア ルゴリズムを開発し、試行的に全体の地形図を作成した。隣り合う測線との整合も良い結 果となった。 弱点としては、時々、バイアス値がずれる、急斜面において左右のエコーが干渉し、登り 傾斜がわのエコーが強く、反対側のエコー信号を乱す結果も見受けられた。 また、エコーのインテンシティをシャドーの判別に利用する、クオリティ判断に使うように 解析ソフトを改良中である。本インターフェロメトリ地形計測装置は、KLINE3000 サイドスキ ャンソーナーにハイドロホンアレイを 3 個ずつ付加する、実験的システムであるが、水面か らの地形計測よりはるかに高分解能で計測できた。今回は SeaBat8160 ではおよそ、10m の水平分解能、インターフェロメトリでは 1m の水平分解能で解析を行った。 また、繰り返し解析法を採用し、データの大きな歪を抑える、精度を繰り返しごとに向上 させる解析手法も新たに加えた。 39 図 7.2_1 ベヨネーズカルデラ北部の r2D4 インターフェロメトリ海底地形図(暫定処理) 北緯 31 度 58.3 分、31 度 59.1 分、東経 139 度 43.1 分、139 度 45.4 分で囲まれる区域 南北 1440m ×東西 4140m の1mグリッド地形、等深線間隔 5m、水深 765m~1000m 図 7.2_2 南西から見たベヨネーズカルデラ北部の r2D4 インターフェロメトリ海底地形鳥瞰図 40 図 7.2_3 北東から見たベヨネーズカルデラ北部の r2D4 インターフェロメトリ海底地形鳥瞰図 41 7.3 GAMOS の観測(岡村) 海況不良などもあり、本行動では観測数が少なかったが、ベヨネーズ海丘における第37 潜航ではマンガン濃度の顕著な異常を捕らえることが出来た。下に観測結果を示した。 横軸は現地時間、縦軸は相対強度である。14時45分過ぎにマンガン濃度20nM相当、 15時55分~16時17分にかけて、マンガン濃度70nMに相当する異常値を観測した。こ のことから、付近の海域でのマンガン放出源の存在が示唆された。明神礁カルデラでの 潜航時にはマンガンの濃度異常は観測されなかった。この理由は、TUNA-SAND の潜航で は熱水活動が観測されたことから、プルームの水深とr2D4の潜航水深が一致しなかった ためであると考えられる。プルーム探索には上下動を伴う prog-AD 航行が必要であること 3000 2008・3・17 GAMOS 2500 マンガン濃度 2000 16:07 16:00 16:17 100nM 1500 14:45 15:55 50nM 1000 0nM 500 浮上中の温度影響 0 12:00:00 13:00:00 14:00:00 15:00:00 16:00:00 17:00:00 が示唆される。 図 7.3_1 ベヨネーズ海丘でのマンガン濃度異常 42 18:00:00 7.4 サブボトムプロファイラ SBP の観測(上嶋正人) ベヨネーズ海丘での r2D4 ダイブ、#38、#40 においてマッピングを目的とした航走観測 を行なう予定であったが、#38 では海底に近づいたときに r2D4 本体の機器異常が発生し 中断された(図 7.4_1).#40 は投入直前にやはり r2D4 本体に機器の異常が生じ、待機 状態のまま#40 ダイブはキャンセルされた。得られた SBP の記録としては不十分なもので あったが高度 100m 付近から高度 15m 程度まで急降下して、またゆっくり浮上していく部分 の記録が得られたので横時間軸、縦高度補正したサブボトム記録で表示したものを図 7. 4_2 に示す。また高度 100m 付近から 15m 付近までであるが、r2D4 本体のサイドスキャン ソナー記録も得られているので対比のため図 7.4_3 に示す。図 7.4_1 の地形図で見ると 急な斜面の途中であり、図 7.4_2 のサイドスキャンソナー画像を見ても岩場のように見え るので堆積物の層は考えにくく、サイドエコーが多いと思われる。 各ダイブの SBP 探査パラメータのリストを表 7.4_1 に示す。 Date 表 7.4_1 各ダイブの SBP 探査パラメータのリスト Dive# Range(m) Gain(dB) Shift(m) 2008.03.23 38 80 15 20 2008.03.25 40 80 15 20 43 図 7.4_1 ベヨネーズ海丘での r2D4 ダイブ、#38 の航跡図(赤が SSBL 測位、緑色は r2D4 自身 の INS 測位、SBP 記録の部分は左下の東西に延びるラインの右端の部分と思われる) 44 図 7.4_2 DAI-PACK サブボトムプロファイラ記録(#38) 記録のレンジ幅は 80m。横幅は時間にして 8 分程度、距離は正確にはわからないが 300m 程度と 推定される。なお、記録中の縦の黒い太線は、SBP 受信部の利得調節が不安定のため生じた高 利得の記録部分である。 図 7.4_3 r2D4 サイドスキャンソナー記録(#38) 記録のレンジ幅は 400m から 300m、200m、150m と海底に近づくにつれ急速に変化している。進行 方向の幅は時間にして 5 分程度、距離は正確にはわからないが 150m 程度と推定される。 45 7.5 SEABAT による海底地形調査(玉木) NT08-06 航海において、その他各種機器による潜行調査と並行して「なつしま」に搭載 されているマルチナロービーム音響測深機「SEABAT 8160」を用いて調査海域である明神 礁、ベヨネーズ海丘及びその周辺海域の地形調査を行った。 「SEABAT 8160」は水平ビーム幅 1.5°、ビーム本数 126 本で水深 10~3000mまで測深 が可能である。なかでも水深が約 1000m~1500m程度の海域での測深に適しており、今 航海の調査海域である小笠原・明神礁海域の調査に有効である。測深幅は最大で水深 の約~倍であるが、データの精度を重視し、今航海では水深の約2倍弱程度にしてい る。 以下に、今航海の調査によって得られた海底地形データから得られた海底地形図を示 す。 7.5.1 r2D4 潜水調査海域の海底地形精査 r2D4 による調査用の資料とするため、r2D4 の調査に先行して、3 月 12 日にまず明神 礁の精査を、3 月 18 日にベヨネーズ海丘の精査を行った。より精密なデータを取ることを 目的としているので、航行速度は平均約 6knot にて測深を行っている。また比較的水深 が浅い地形を含むので、測線の間隔も狭くしてある。以下にデータから得られた海底地 形図を示す。(図 7.5_1 、図 7.5_2) 7.5.2 明神礁海域周辺部の海底地形の調査 過去に同海域で行われた KR05-11 航海・NT07-17 航海にて得られた明神礁海域の海 底地形データと合わせてさらに広範囲の海底地形図を作成するため、今航海では 3 月 11 日、15~17、25 日にかけて明神海丘北方の、3月 18、23、26 日にかけて明神礁南方 の海底地形調査を行った。航行速度は平均 8knot にて測深を行っている。以下にデータ から得られた海底地形図を示す。(図 7.5_3、図 7.5_4) 3 月 15 日夜、18 日午後は海況が悪く、途中で測線を中断している。中断した測線は後 で再度測深しなおしているが、その直前に行っていた測深は若干データの精度が低くな っている可能性がある。 最後に、今航海で得たデータ全体の海底地形図と、KR05-11 航海・NT07-17 航海のデ ータと合わせた明神礁海域全体の海底地形図を示す。(図 7.5_5、図 7.5_6) 図中の等高線は 20m間隔、太線が 200m間隔となっている。また図 7.5_1~図 7.5_2 の赤線は測線である。図 7.5_3~図 7.5_4 には測線は記入していないが、全て南北方向 に1分刻みで測線を引いている。 46 図 7.5_1 明神礁 図 7.5_2 ベヨネーズ海丘 47 図 7.5_3 明神海丘北方 図 7.5_4 明神礁南方 48 図 7.5_5 NT08-06 全体 49 図 7.5_6 明神礁海域全体 50 8.おわりに(浦) 本航海は、2003 年以来、r2D4 にとって最も厳しい航海の一つであった。海況が悪く、八 丈島あるいは青ヶ島沖へと避航を余儀なくされること数度におよび、また、ロボットの不具 合の調整を揺れる船室内でおこなわなければならない困難な状況が長く続いた。それに もかかわらず、r2D4 の潜航および最新鋭の Tuna-Sand を潜航させ、熱水活動の観測に 成功したことはとても素晴らしいことである。これには、請蔵栄孝船長、地頭薗達男機関 長、久坂真一一等航海士を始めとする「なつしま」乗組員の献身的なご努力ご協力にお うところが大きい。とくに、1.5 トンのロボットを揺れる船から安全に着水揚収させる技術に は全幅の信頼がおけ、船上作業の高度な技術には頭が下がる思いがする。ここに、改め て感謝する次第である。着水揚収作業をいかに簡略化させるように AUV を設計するかが、 技術者の課題であることを痛感させられた。また、揺れる船上で様々な作業や調整、準 備作業をおこなってくれたロボットチームおよびペイロードチームの皆様に深く感謝する 次第である。ロボットの高い信頼性と十分な予備品の確保が確実な観測を実現させること を示した。 今回は、2台の AUV を交互に展開して、貴重なシップタイムを有効に利用する方策をとっ た。これは、休みのないデッキ作業を要求することになり、こころよく作業を引き受けてくだ さった乗組員の皆様に改めてお礼を申しあげる。今後は、さらに AUV を進化させ、複数台 の AUV を同時に展開させることのできるように技術レベルを向上させたい。 明神礁海域は、熱水鉱床の開発が期待される海域として注目が集まっている。資源を発 見し、その賦存量を推定するのに十分なデータを取得することが、AUV によってなされれ ば、こんなに素晴らしいことはない。我々はそれを目指して着実に前進していこうとしてい る。チャレンジングな潜航、チャレンジングなミッション、それをこなしていくことが研究者の 使命であり、船の力強い協力を仰ぎたい。 51
© Copyright 2026 Paperzz