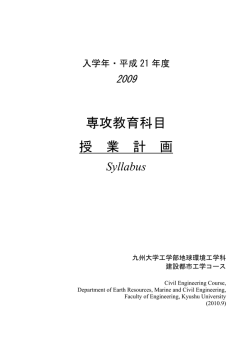
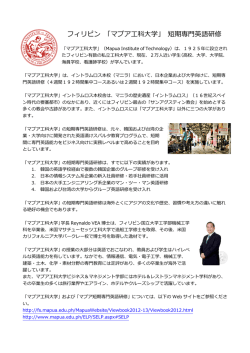
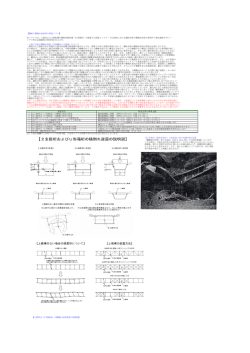
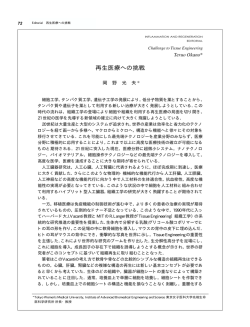
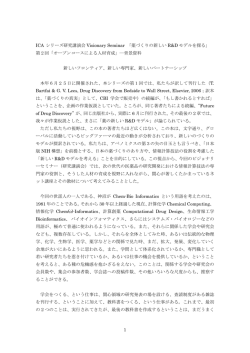
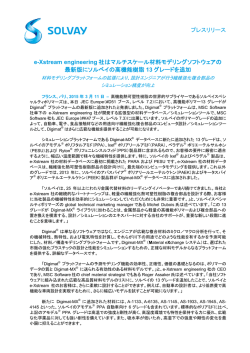
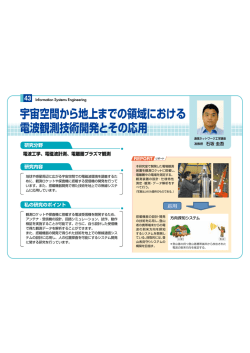
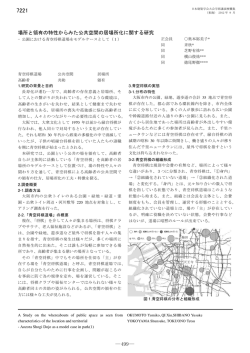
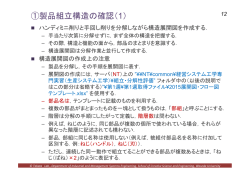
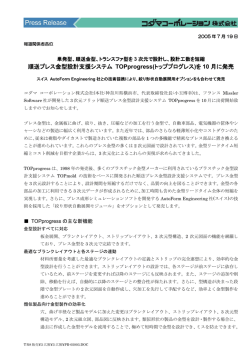
「生体情報工学」 (東京電機大学出版局)の増補 130505 1章 序論 1.1 生体情報工学 生体情報の計測、処理、制御を工学の立場から取り扱う生体情報工学を、 Biological Information Engineering と英語表記した.これは文献(星宮、86)によるものである. 生物情報(バイオ情報)と計算機科学の融合が起こり、生物情報科学 (Bioinformatics バイオインフォマティクス)の分野が作られてきた。バイオインフォ マティクスに関する米国連邦保健局 NIH(National Institute of Health) の定義は. What is Bioinformatics ? - Research, development, or application of computational tools and approaches for expanding the use of biological, medical, behavioral or health data including those to acquire, store, organize, archive, analyze, or visualize such data. (Working definition of Bioinformatics -July 17, 2000) である.日本国内で、研究会、学会でこの名称を用いると ころは、遺伝子、タンパク質などのミクロなレベルを対象としている学問である分子生物 学、生化学などと計算機の融合の領域を意味しているようである.NIHの定義はより広 い領域を意味している.NIHの定義を基にすると、生体情報工学は現在では Bioinformatics Engineering を包含しているように思える. 認知科学は、人間のこころの仕組みの解明を目指す学問で、心の中の表象(表現)のレ ベルでの理解と、情報処理システム(視覚、音声などの入力に対して情報処理を施して運 動として出力するシステム)とみなすこと、の2つが中心である.課題は、知覚、思考、 学習、記憶、意識、感情、信念システム、行為実現、技能、発達、言語、相互作用であ る.生体情報工学には、この領域も含むことになる. 1.1.5 生体工学 バイオニクスbionicsは生物的原理と物理的原理を融合することによって技術の新し いフロンテイアを目指すとの理念のもとに提唱された学問である。生命 の基本単位を表 すギリシャ語 bion に応用を意味する語尾 ics を付けたものである. 生体工学 Biological Engineering と医用工学 Medical Engineering はそれぞれ目指 すところが違うので厳密には分けて考えた方がいいが、研究者や手法として共通の面が 多いので、まとめて医用生体工学Biomedical Engineering と呼ばれることが多い. s1−1/10 Y センサ1 (ヨーイングを検出) 検ヨ 出ー 器イ ン グ ヨーイング (左右方向のブレ) センサ2 (ピッチングを検出) センサ回路 モータ1 (上下方向に駆動) 角速度信号 ブレ補正光学系 サーボ回路 光軸の方向 X Z ピッチング (上下方向のブレ) モータ2 (左右方向に駆動) 図S1.1 手振れ補正カメラの構成 1.2 機械と生体の比較例:カメラの手ぶれ補正と前庭動眼反射 1.2.1 カメラの手ぶれ補正 手ぶれ補正のシステムでは、基本的には、手ぶれの検出と手ぶれの補正の2つの機能 が必要であり、現在の機器では、それぞれについて、 (1)手ぶれ(動きベクトル)の検出の方法として、 i) センサにより角速度検出する方式、 ii) 画像から手ぶれを検出する方式、 (2)手ぶれ補正の方法として、 i) 機械的な補正方式(レンズあるいはプリズムを駆動して補正)、 ii) 画像処理による補正方式(取り込んだ画像を移動させて手ぶれを除去)、 がある. カメラに搭載されたシステム(大石、94)の概略は図S1.1に示す.圧電振動 ジャイロ(角速度センサ)を2個用い水平、垂直2方向の動き、つまり、カメラのヨー イング方向(左右方向)とピッチング方向(上下方向)の手ぶれの角速度を検出する. 検出された角速度に応じて、ヨーイング方向とピッチング方向にそれぞれ専用に設けら れたモータを駆動し、手ぶれ補正光学系を制御する.ここでは位置、速度のフィード バックを用いたサーボ系が用いられている. 1.2.2 前庭動眼反射 <前庭動眼反射による眼球の動き> s1−2/10 図S1.2 頭部の正弦波状の回転(上段)に対する眼球の頭部に対する回転(中段)、眼球運動の 中の前庭動眼反射による緩徐相cumulative eye positionの成分(下段)。 前庭反射の振る舞いがヒトを用いて調べられている.図S1.1に計測結果の一例を示 す(宗木、74).ヒトをイスに座らせ、そのイスを水平面内において左右に正弦波状に 回転させる.なお暗所において開眼の状態である.頭部に対する眼球の回転角度は眼電位 を計測することにより検出する(付録1ー1参照).図の上段は頭の回転角度で、中段は このときの眼球運動(頭部に対する回転角)である.頭部の回転の周波数と同じゆっくり とした動きが見られる.これが前庭動眼反射による成分である.下段に前庭動眼反射の応 答を示す.急速相を取り除いて得られる緩徐相の成分cumulative eye positionである. 図に見られるように、緩徐相成分は頭部位置とほぼ180度位相がずれ、逆の方向に回転 して頭の動きを補償している.なお、正弦波の入力(頭の回転角度)に対して正弦波の出 力(緩徐相成分)となっており、本実験条件の下では前庭動眼反射の系は概ね線形系と考 えることができる. ものを眺めているとき、頭を動かすと、このような反射が働き、網膜上の像のブレの 補正に役立っているのであろう.なお図S1.2は、暗所での前庭動眼反射の応答であっ ------------------------------------------------------------------------注1:人体の構成単位は細胞cellである.一定の機能を分担するようになる細胞の集 団を組織tissueという.上皮組織,筋組織,神経組織などがある.数種類の組織から なり,さらに高次の機能を営む形態を器官または臓器organという.例えば、心臓で ある.協同して働く器官を群にまとめて系統systemという.視覚系、運動系とい s1−3/10 て、明るい所でのブレ防止に前庭動眼反射がどの程度貢献しているかは、十分には明確に されていない.いずれにせよ網膜上の像のブレが生じるとき、前庭動眼反射、急速眼球運 動などいくつかの機能がその防止のために並列に働いていることは間違いない. <前庭動眼反射の周波数特性> 前庭動眼反射の周波数特性がネコを用いて計測されている.頭部回転θhを入力、前庭 動眼反射による眼球の回転角度θeを出力としている.結果の一例を図S1.3に示す ( Carpenter, 72 ).図の上部がゲイン、下部が位相であり、正常ネコの結果を×印で プロットしている .0.1Hz近傍でゲインは1.0であり、位相は約180度進んで 図S1.3 前庭動眼反射の周波数特性 ネコの結果、小脳があるときと除去されたとき. s1−4/10 おり、頭の回転を補償していることが分かる.ただし、ゲインは周波数が高くなると減少 し、位相の進みも減少している.この特性は、伝達関数Gvor (s) で表現すると、近似的に Gvor (s) = Θe (s) 0 . 5 ( 1+ 0.57 s ) = Θh (s) s ( 1+ 0.047 s ) (S1ー1) で表される(宗木、74).図S1.3の波線がこの関数の周波数特性である. 前庭動眼反射に対して重要な役割を果たしている前庭小脳を除去し、同様にして周波数 特性を測定している.図S1.3に⃝印でプロットしている.図に示すように、小脳が除 去されたときは、ゲインは低周波数の領域では1.0より小さく前庭動眼反射はほとんど 20° D1 右 D7 Vh 右 1s 図S1.4 前庭動眼反射の応答 正弦波状頭部回転に対する眼球運動を示す.Vhは頭の回転角速度(60deg/s, 0.17Hz)、D1は左 右が逆転するプリズムを装着する前、D7は装着後7日目、の眼球の回転角度. (Gonshor 、76) 頭の動きを補償していない.この周波数特性 は、近似的に Gvor (s) = 16 ( 1+ 1.4 s ) (S1ー2) s ( 1+ 8.84 s ) と表現される.図の実線はこの式から得られるゲインと位相である. <前庭動眼反射の適応> 前庭動眼反射は実は開ループ制御系になっている.小脳はこの反射弓に大きく関わって いる.小脳は前庭器官からの信号を受け、頭が動いたとき、プルキンエ細胞から前庭核へ の抑制性信号をどれだけ出力すれば適切な眼球運動が起こるかを計算している訳である. s1−5/10 図S1.5 前庭動眼反射のゲインの変化 横軸は実験開始からの日数で、最初の上向きの矢のときゴーグルを装着し、次の矢のとき、 それを外している. このフィードフォワード型制御系において小脳は計算機の役目を果たし、パーセプトロン と同様の学習機械であると言われている.教師信号は下オリーブ核からの視覚情報であ る.網膜上の像を処理し、視野にブレが生じたかどうか、そしてそれはどれだけかという 処理・判断結果である. 視覚環境を正常から異常な状態に変化させたときの実験結果を説明する(Gonshor 、76).ヒトに左右が逆になるメガネ(ゴーグル)をかけて日常生活を送らせた場合で ある.このメガネをかけると、頭を動かした場合、前庭動眼反射は余計にものがブレて見 えるように働く.この反射はないほうがよい.このメガネを掛ける前の前庭動眼反射の応 答を測定している.図S1.4に結果の一例を示す.曲線Vhのようにヒトの頭をゆっく りと左右に回転(正弦波状、角速度振幅60度/s、0.17Hz)させる.このときの眼 球運動(頭部に対する回転角)を曲線D1に示す.このメガネをつけさせて1週間後に、 ヒトを回転台にのせて眼球運動を計測した結果が曲線D7である.緩徐相成分の振幅が曲 線D1より小さくなっている(約1/4に減少). ゲインが装着後にどのように変化したを図S1.5に示す.周波数は0.17Hzであ り、角速度についてのゲインを求めている.つまり、眼球運動の角速度の緩徐相成分の振 幅を e とし、頭部回転速度の振幅を h とすると、ゲインは e / h である(付録1− 2).装着後ゲインが減少していることが示されている.左右が逆に見えるような視覚環 境下にすると、前庭動眼反射のゲインが時間と共に徐々に減少するという結果である.7 日目にメガネを外しているが、メガネをはずすと、ゲインはゆっくりと増加している.そ s1−6/10 して、元に戻る.(生体情報工学の図1.5のD9は図S1.5の9日の結果に対応す る.)なお、このような前庭動眼反射のゲイン変化という適応・学習に小脳が深く関わっ ていることがウサギを用いた実験により明らかにされている. 1.6 課題 課題1.1 の解答 ヒント:自分の右手は体の正面の左側に見える.左側に見えるが、体性感覚 からは右手として認知されているので、動かしている右手を右手と認知すると き、当初頭では混乱がおきる. 課題1.2 の解答 ヒント:直角プリズムを利用すればよい.一例を図S1.6に示す. 図S1−6 左右が逆に見えるプリズム s1−7/10 付録1−1 電気眼球図 EOG ー 眼球運動の計測 ー 眼球運動の測定法として、網膜と角膜との間の電位差を利用する方法がある。この電位 を計測、記録したものが電気眼球図 Electro-oculogram(EOG)である。角膜は網膜 に対して0.4∼1.0mV正の電位を有している。その発生メカニズムはよく分かって いない。図S1-7に示すように眼球を回転させ注視の向きを変えるとき、この静止電位 も眼球と共に回転する(齋田、84)。眼の左右に皮膚電極を置くことにより、この電位 差を検出できる。その電圧変化は眼球の回転角度と関数関係がある。つまり静電位のベク トルの水平方向成分に比例したものが得られる。 出力の電位 VEOG は視線の向きを θとすると、 VEOG = k sin (S1-3) である.ただしkは比例定数である.30度程度の眼球の回転に対して約1mV程度の電 圧が得られる。一対の電極を左右に置くとき水平方向の眼球運動が計測され、上下方向に 置くときには上下方向の眼球運動が計測される。なお一対の電極を1つの眼に置くときに はその眼だけの運動を検出できる。 図S1-7 電気眼球図の測定の原理 s1−8/10 付録1−2 周波数特性 伝達関数と位相、ゲインの関係は以下の通りである. 入力をx(t)、出力をy(t)とし、伝達関数をG(s)とする.入力、出力のラプラ ス変換をX(s)、Y(s)とすると、複素数であるので、 X (s) = X ( j ) e j ΘX ( ) Y (s) = Y ( j ) e j ΘY( ) (S1-4) (S1-5) と表される.ここで、ωは角周波数、 Θ X ( ) 、 Θ Y ( ) はそれぞれX(s)、Y(s)の 位相である.また、伝達関数G(s)も複素数であるので、 G(s) = Y (s) X(s) (S1−6) G (s) = G ( j ) e j Θ G ( ) (S1−7) と表現される.したがって、ゲインについては G( j ) = Y (j ) X( j ) (S1−8) の関係があり、位相については Θ G ( ) = ΘY ( ) − Θ X ( ) (S1−9) の関係がある.ゲイン、位相ともに周波数の関数であることに注意.なお、入出力を角度 とする場合と角速度とする場合、線形系ではゲインは同じ値になる. ゲイン特性と位相特性を図で表現したものがボード線図である.実際のシステムを対象 とするとき、正弦波入力を与えて、十分時間が経過した状態での出力の振幅と位相を測定 する.正弦波入力の周波数を低い周波数から十分高い周波数まで変化させて、この測定を 繰り返す.一般に横軸は対数目盛の周波数、縦軸はゲイン(単位はdB)および位相 (度)である. s1−9/10 参考文献 (Gonshor, 76) A.Gonshor & G.Melvill Jones: Extreme vestibulo-ocular adaptation induced by prolonged optical reversal of vison, J. Physiol., Vol.256, pp.381-414 (1976 ) (日下、95) 日下博也:手振れ補正、テレビジョン学会誌、vol.49, No.2, pp.131134 (1995) (大石、94)大石末之:アマチュアをプロにする「手振れ防止」のテクニック、エレク トロニクス、7月号、pp.31-34 (1994) (宗木、74) 宗木好一郎、藤井克彦:前庭動眼反射機構の数学モデル、第17回自 動制御連合講演会、No.1112,pp.215-216(1974) (Carpenter,72) R.H.S.Carpenter: Cerebellectomy and the transfer function of the vestibulo-ocular reflex in the decerebrate cat, Proc. Roy. Soc. Lond. B, Vol. 181, pp. 353-374 (1972) (齋田、84) 齋田真也:眼球運動の計測、工業技術院 製品科学研究所報告 No.99, pp.20-24 (1984) s1−10/10
© Copyright 2026 Paperzz