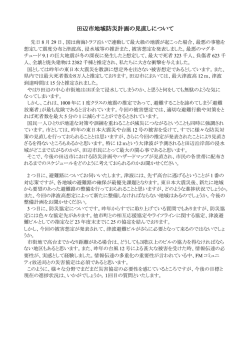
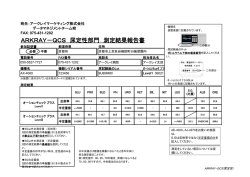
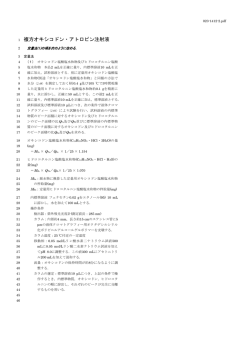
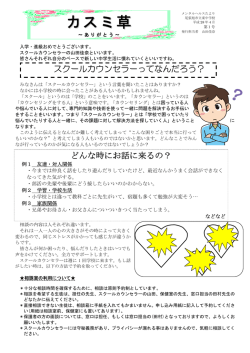
JSASS-2014-4284 第58回宇宙科学技術連合講演会講演集 2014年11月12日~14日 長崎ブリックホール 1M27 小惑星探査ローバ MINERVA-II2 搭載カメラによる 撮像ミッションの実現を目指した撮像条件に関する研究 ○菅野良祐,鳴海智博,木村真一(東京理科大学) , 小林正規,千秋博紀,石橋高,和田浩二(千葉工業大学惑星探査研究センター) Research on Image Conditions Using “MINERVA-II2” Micro Digital Camera Ryosuke Sugano, Tomohiro Narumi, Shinichi Kimura (Tokyo University of Science), Masanori Kobayashi, Hiroki Senshu, Ko Ishibashi, Koji Wada (Planetary Exploration Research Center, Chiba Institute of Technology) Key Words: Hayabusa-2, MINERVA-II2, Micro Digital Camera Abstract When MINERVA-II2 realized exploration on asteroid 1999-JU3, we could obtain valuable information regarding the origin and evolution of the solar system as well as the development of life on Earth and elsewhere. Therefore, it is important to visually survey the asteroid surface conditions and to success image acquisition of asteroid surface. On the other hand, it is difficult to predict imaging conditions precisely because the asteroid surface conditions are ambiguous. In addition, MINERVA-II2 explores the asteroid on autonomous control, it is necessary to obtain knowledge about imaging conditions in advance. In this work, we acquired images of simulated targets such as meteorites using solar simulator and studied about imaging conditions of asteroid by image acquisition system of MINERVA-II2. 1. 目的及び背景 本体に搭載した複数の探査プローブを小惑星に向け 小惑星はその小さなサイズゆえに,形成以来,熱 て放出することで,小惑星表面の環境を直接探査す や重力による変成をあまり受けていない.中には太 ることも試みる.はやぶさ 2 には超小型小惑星探査 陽系形成当時の情報を保持しており,隕石の母天体 ローバシステム MINERVA-II(Micro-Nano と考えられているものもある.このような小惑星を Experimental Robot Vehicle for Asteroid II)3)の搭載が予 探査することは人類にとって太陽系の起源を知るた 定されており,直接的な表面移動探査による詳細デ めに非常に重要なミッションである.はやぶさ 2 プ ータの取得が期待されている.本研究では,複数あ 1) ロジェクト は,このような始原天体におけるサンプ る MINERVA-II ローバのうち,MINERVA-II2 に関す ルリターンによる探査を主目的としている.ターゲ る探査ローバを対象とする.我々はこの 2) ットとなる天体は近地球型小惑星 1999JU3 であり, MINERVA-II2 に,東京理科大学木村研究室によって 炭素質隕石と似た反射スペクトルを持つ C 型小惑星 開発された超小型宇宙用デジタルカメラ(通称: に分類され,普通隕石と同様の物質を主成分とする S MICAM)の搭載を予定しており,小惑星表面の近接 型小惑星のイトカワに比べ,多くの有機物や含水鉱 撮像の実現を目指している.小惑星表面の鮮明な画 物が存在していると考えられている.はやぶさ 2 は 像を取得することで,表面物質の色や形状を把握す ⓒ日本航空宇宙学会 ることができ,太陽系の起源を知るための理科学的 の確立及び実証を行う.図 1 に MINERVA-II2 ミッシ に重要な手がかりとなることが期待される.この点 ョンシナリオの概念図を示す.本体の重量は約 1.5kg, からも,MINERVA-II2 にカメラを搭載し,撮像ミッ ローバの質量は 900g,直径 150mm,高さ 150mm の ションを成功させることは必須である 4). 8 角形状の構体となっており,太陽電池セル,電気二 一方,探査機打ち上げには莫大なコストがかかる 重層コンデンサ,通信機,通信用アンテナ,センサ ことや地球と小惑星との公転周期等も考慮すると, 機器,移動機構を搭載する.MINERVA-II2 ローバは, ミッションタイミング自体極めて限られており,確 はやぶさに搭載された MINERVA 同様多くの民生部 実に撮像ミッションを成功させる必要がある.また 品を活用する予定であり,これにより従来の衛星開 今回ターゲットとなる小惑星に限らず,今後も様々 発費に比べ徹底した低コスト化を実現し,機体の小 な小惑星における撮像ミッションの実現を目指した 型化・軽量化も図ることが可能である.MINERVA-II2 取り組みは継続して行われるべきである.その意味 は,小惑星表面上をホップしながら移動するホッピ でも,各小惑星における撮像ミッション毎に撮像条 ング移動方式を採用している.このことで,微小重 件に関する予測・分析を入念に行う必要があり,ミ 力下における移動探査を可能とし,ローバ側面に互 ッション成功確率の向上を目指さなければならない. いに逆向きに取り付けられた 2 台の MICAM によっ さらに,小惑星表面における鮮明な画像取得を目指 て,多彩な角度で小惑星表面を撮像することが可能 した撮像条件に関する研究は必須ではあるが,先行 である.これにより,太陽系の起源に迫る非常に価 研究が少なく,知的財産の共有が十分になされてい 値の高い画像の取得が期待される. ないのが現状である. そこで我々は,地上実験室に小惑星の模擬環境を 構築し撮像実験を行うことで,小惑星表面における 撮像条件に関する研究を行った.実験では,近日打 ち上げが予定されているはやぶさ 2 に搭載される MINERVA-II2 における撮像ミッションをモデルケー スとして撮像実験を行った.実験では,東京理科大 学野田キャンパス実験棟内に暗室と人工太陽照明灯 図 1 MINERVA-II2 ミッションシナリオ概要 を備えた模擬環境撮像実験室を構築し,床面に隕石 表 1 小惑星 1999JU3 の主要諸元 1) や地上サンプルを配置することで,小惑星表面環境 Rotation Period Diameter Aspect Ratio Geometric Albedo Magnitude(H) Slope Parameter(G) Perihelion Apoherion Spectrum Type を模擬した.さらに実験結果を小惑星 1999JU3 の照 度環境やランディングポイント,公転軌道の関係と 合わせて考察を行った. 本研究では,小惑星 1999JU3 表面における撮像の 実現を目指した最適な撮像条件に関する検討を行っ たので報告する. 2. MINERVA-II2 3. 7.6hr 0.922±0.048km 1.3:1.1:.1.0 0.063±0.006 18.82±0.021 0.110±0.007 0.85AU 1.4AU Cg MINERVA-II2 搭載カメラシステム MINERVA-II2 とは,小惑星表面を走破することで MINERVA-II2 における小惑星撮像ミッションを実 小惑星表面上を直接探査することを目的とした,自 現させるために,搭載するカメラは地上とは異なる 律型小惑星探査ローバシステムである.小惑星表面 特殊な撮像環境を想定した上で,小惑星表面の画像 上における探査を通じてロボット探査に必要な技術 を至近距離かつ高解像度で取得することが必要であ る.そこで木村研究室では民生部品 5)6)を用いて超小 型宇宙用カメラ MICAM を開発し,MINERVA-II2 ロ 4. 実験 本実験では,地上に小惑星 1999JU3 模擬環境を構 ーバに 2 台搭載することを計画している.MICAM は, 築し,MINERVA-II2 搭載カメラを用いて撮像実験を 総重量 40g という,従来の宇宙用カメラである 行った. IKAROS 搭載統合カメラや CANAL-1 カメラ等と比 較しても驚異的な軽量化を実現した.さらに筐体設 計においても極限まで小型化を図ることでミッショ 4.1 実験概要 本実験について概要を以下に記す. ンデザインをクリアしつつ,かつメガピクセルサイ 実験では,様々に照度を変化させて撮像対象物の画 ズでの撮像も可能である.またイメージセンサーに 像を取得することで,鮮明な画像を取得するための 加え,画像を一時的に貯める FIFO メモリと PIC マイ 最適な撮像条件の検討を行った.小惑星 1999JU3 の コンを組み合わせた構造を用いることで,MICAM は 照度環境やランディングポイント,公転軌道の関係 非常にシンプルかつインテリジェントな回路構成を と合わせて考察を行うことで,撮像ミッションを成 実現した世界最小の宇宙用デジタルカメラであると 功させるために最適な撮像条件に関する検討をして いえる. いる.対象小惑星の近日点距離が 0.85AU,遠日点が 1.4AU であることから,照度は最大で 10 万 lx 程度ま でと想定した. 4.2 実験環境 本実験を行うにあたりに使用した環境及び装置に ついて記す.実験は東京理科大学野田キャンパス実 験棟内に暗室と人工太陽照明灯を用いて構築された 撮像実験室内にて行った.床面の反射を抑制するた めに玄武岩スコリアプレート(反射率:2~3%)を敷 き,その上に撮像対象物を設置した.カメラは木村 図 2 MICAM 概要 研究室製作の超小型宇宙用デジタルカメラ MICAM を使用した.その他に,人工太陽照明灯(セリック 表 2 MICAM 仕様 MICAM.spec Size 45mm×46mm×27mm Weight 39g Image Sensor OV-9630 Image Format RAW RGB Data 1280×1024(SXGA) Image Size 640×480(VGA) 33.3μs.Min ExposureTime 68.3ms.Max Lens f=2.0mm,F2.0 125.3deg,Horizontal Angke of Views 97.7deg,Vertical 148.2deg,Diagnal I/O UART Power Consumption 0.11W Sensitivity 1.0V/Lux-sec 社製 XC-500A) ,標準反射板(SRS-05-010,反射率: 5%程度) ,床面反射防止用ラシャ紙(反射率:5~10%) , 照度計(LutronLX-1102) ,撮像対象物として 1999JU3 表面に存在すると予想される隕石サンプルを使用し た.本実験では,隕石サンプルの左斜め上方 45 度付 近から人工太陽照明灯を照射し,MICAM に反射する 光の反射角は約 20 度程度である.また鮮明な画像を 取得できたかという基準は,アエンデ隕石表面のコ ンドリュールとマトリクス部分の識別が可能かどう かという点を重視した. 図 3 実験時外観 図4 1330×10lx,Gain:0x3f,Ex:0x00(MSB),0x04(LSB) 図5 2379×10lx, Gain:0x3f,Ex:0x00(MSB),0x04(LSB) 表 3 隕石サンプル一覧 反射率:N/A 粒子サイズ:15~25mm アエンデ隕石 隕石タイプ:CV3 備考:水~(0.1w%)、炭 素~(0.2w%)に富む 反射率:N/A 粒子サイズ:30~45mm マーチソン隕石 隕石タイプ:CM2 備考:水~(0.1w%)、炭 素~(0.2w%)に富む 反射率:N/A ノゴヤ隕石 粒子サイズ:15~25mm 隕石タイプ:CM2 反射率:2~3% 粒子サイズ:~100mm 備考:40cm×40cmのプ 玄武岩スコリアプレート レートに1~3cm程度の スコリアを敷き詰めた もの 4.3 結果 撮像実験における結果を以下に示す. 床面には玄武岩スコリアプレートを敷き,標準反射 板,ノゴヤ隕石,アエンデ隕石,マーチソン隕石を 設置している. 図 6 1053×102lx,Gain:0x3f,Ex:0x00(MSB),0x04(LSB) 図3 1030lx,Auto-Shot ントを設定するべきであることがわかった.まず日 陰時等の暗闇環境においては,カメラのゲインや露 光時間を最大値に設定しても鮮明な画像を取得する ことは出来ない.そのため撮像可能時間をできるだ け長くするために,ローバがランディングするポイ ントは小惑星表面の中でも日照時間の長い地点を選 択するべきであると考えた.これに関しては, MINERVA-II2 ミッションデザインとの兼ね合いもあ ることから,十分に議論されるべきである. 3 つ目に,小惑星軌道は近日点に近いほうが, 図7 2 1267×10 lx,Gain:0x3f,Ex:0x00(MSB),0x04(LSB) MINERVA-II2 における撮像ミッションの成功確率は 高いことがわかった.MINERVA-II2 ミッションは, 1.2AU~1.4AU 程度による比較的遠日点付近におけ 4.4 考察 撮像実験の結果から,以下の 4 つの点について知 見を得ることができた. 1 つ目に,日照時のような比較的高照度時間帯にお るローバの放出を想定している.一方,小惑星表面 の鮮明な画像を取得するためには,隕石や岩石のコ ントラストに富んだ画像を取得する必要がある.そ のためには,撮像時にいかにして光量を稼ぐかとい いては,カメラの露光時間を限りなく短くし,ゲイ うことが前提となってくる.また光量や照度変化は, ンを調節することで撮像するのが望ましいことを確 光源と投影物との距離というパラメータに強く依存 認できた.逆に日陰時の比較的照度が低いと予想さ することが知られている.そこで光源である太陽と れる状況においては,AutoShot モードによる撮像が 小惑星との距離(太陽距離)が適切な近さであるこ 得策であると判断した.まず AutoShot モードの場合, とが撮像ミッション成功の鍵となってくる.小惑星 光を相当量取り込んでしまい画像がすぐに白とびし 1999JU3 の公転軌道から,近日点は 0.85AU,遠日点 てしまう.そのため日照時には Gain や Exposure を は 1.4AU とすると,遠日点と比較して近日点の場合 OBC 側で設定する ManualShot モードによる撮像を行 同じ条件における太陽光照射でも照度に約 2.7 倍の うことを前提とする.小惑星表面の自転周期は約 差がでる.つまり,遠日点付近で撮像ミッションを 7.6hr となっており,MINERVA-II2 ローバのランディ 行ってしまうと,最大光量が足りずに鮮明な画像を ングポイントにもよるが,小惑星では大気による太 取得するのが困難になる可能性がある.そのため, 陽光の散乱が無いため,小惑星表面の照度は自転と MINERVA-II2 における撮像ミッションのみに着目す ともに急峻に変化することが考えられる.また日照 ると,近日点付近の比較的高照度が期待できる環境 時の光量は極めて大きいことから,むやみにカメラ において撮像ミッションが行われるべきであると考 の露光時間を調節した撮像をすることは得策ではな えた. く,露光時間のレジスタ値はできるだけ抑え,ゲイ 4 つ目に, MICAM のイメージセンサーの特性から, ンを調節することで撮像するのが望ましいことが確 約 10,000lx から 120,000lx 程度においては,Gain を 認された.また日陰時等の 1000lx を下回る低照度時 0x3f,Exposure を MSB:0x00,LSB:0x04 とすることで 間帯においては,AutoShot モードで撮像することで, 鮮明な画像を取得できることが確認できた.このこ 十分鮮明な画像を撮像することができた. とから,広範囲にわたる小惑星表面の照度条件にお 2 つ目に,小惑星表面を鮮明に撮像するためには, 出来るだけ日照時間が長い地点にランディングポイ いて,撮像の成功が期待される. 5. 結言 2) 本実験より,小惑星 1999JU3 表面上における近接 やぶさ後継機に向けた小惑星 1999JU3 の観測”, 撮像を行う際の,鮮明な画像を取得するための撮像 条件に関する知見を得ることができた. 川上恭子,阿部正真,長谷川直,春日敏測, “は 日本惑星科学雑誌 Vol19,No1,2010. 3) 1 つ目に,日照時には露光時間をできるだけ短くし, Takashikubota,TetsuoYoshimitsu,“Intelligent Rover with Hopping Mechanisum for Asteroid ゲインを調節することで撮像を行い,日陰時には Exploration”, p979~p984,Print-ISBN-978-1-4673- AutoShot モードで撮像するのが望ましいことがわか 6395-2. IEEE2013. った. 4) 2 つ目に,MINERVA-II2 ローバのランディングポ 菅野良祐,鳴海智博,鵜山尚大,木村真一,小 林正規,千秋博紀,石橋高,和田浩二,八並裕 イントはできるだけ日照時間の長い地点が良いこと 幸,永岡健司,吉田和哉, “小惑星探査ローバ がわかった. MINERVA-II2 搭載カメラに関する太陽光模擬環 3 つ目に,撮像ミッションにのみに着目した場合, 境撮像実験” ,第 57 回宇宙科学技術連合講演会 小惑星軌道が近日点に近いほうが,ミッションの成 功確率は高まることがわかった. JSASS-2013-4744,P51,2013. 5) Using COTS”, International Astronautical Congress 4 つ目に,Gain を 0x3f,Exposure を MSB:0x00, LSB:0x04 とすることで広範囲の小惑星表面照度にも 対応できる撮像が可能となることがわかった. 本実験より,はやぶさ 2 から MINERVA-II2 を投下 S. Kimura, et. al., “Low Cost Small Space Camera 2008, Glasgow, U.K., IAC-06-D1.2.03,2008 6) Shinichi Kimura, Masato Terakura, Hirotaka Sawada,High-Performance Visual Monitoring するタイミングや,1999JU3 の目標ランディングポ System For IKAROS,Advances in Micro- イントなど,小惑星表面における撮像を前提とした electronic Engineering,Vol. 1,No. 3,p57~p65, 場合の撮像条件に関する知見を得ることができた. 2013. 一方で,伝送容量との兼ね合いから,さらなる高解 像度における撮像を行うべきかより深い議論がなさ れるべきである. 6. 謝辞 本論文作成にあたり,玄武岩スコリアプレートを 提供して頂いた水野貴秀先生(JAXA) ,隕石サンプ ル及び標準反射板を提供してい頂いた杉田精司先生 (東京大学)に心より感謝致します. 7. 1) 参考文献 津田雄一,國中均,吉川真,倉岡今朝年,南野 浩之,櫛木賢一,今村祐志,阿部正真,渡邊誠 一郎,“小惑星探査機はやぶさ 2 の開発状況” , 第 57 回宇宙科学技術連合講演会 JSASS-20134040,1C03,2013.
© Copyright 2026 Paperzz