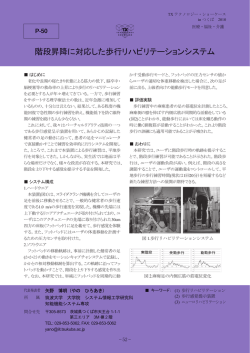
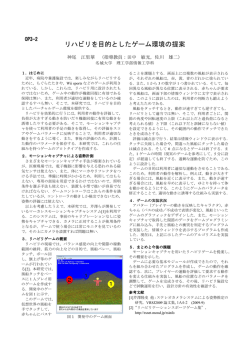
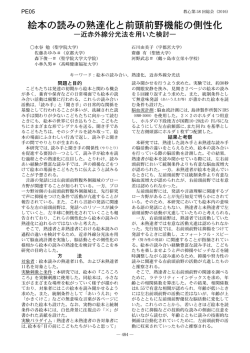
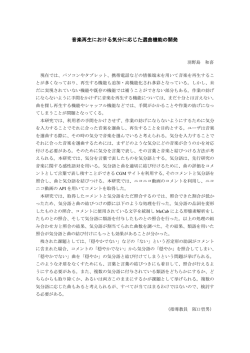
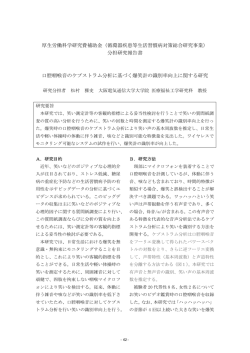
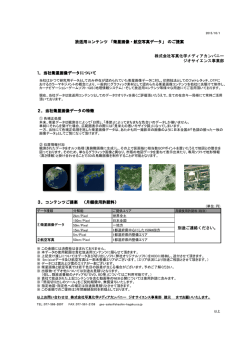
民生用デジタルカメラによる3次元計測に関する研究 東京電機大学大学院 理工学研究科 建設環境工学専攻 近津研究室 野上千敏 1.はじめに 民生用デジタルカメラの低価格化および高解像度 化が進み、高解像度 CCD センサを搭載した多種、多 様な民生用デジタルカメラが発売され、2006 年 1 月 現在では 800 万画素の民生用デジタルカメラの発売 に至り、手軽に高解像度画像を手に入れることが可 能となった。このような背景より、民生用デジタル カメラを用いた簡便的な写真測量が期待されている。 しかし、民生用デジタルカメラを用いて写真測量 を行う場合、一般的には地上基準点を用いてカメラ キャリブレーションを行う必要があり、基準点設置 に伴う測量は簡便な写真測量のボトルネックとなっ ている。そこで近津らは、これまでに地上基準点を 必要としない民生用デジタルカメラによる写真測量 用ソフトウェア 3DiVision の開発を行ってきた。 また、現在多くの写真測量用ソフトウェアが発売さ れているが、3DiVision を含めこれら写真測量用ソ フトウェアを使用する際にはデジタルカメラの内部 標定要素を予め算出する必要があり、民生用デジタ ルカメラを使用した実用的な 3 次元計測の問題とな っている。 このような背景より、本研究では、地上基準点を 必要とすることなく、且つ事前にカメラの内部標定 要素を求める必要のない 3 次元計測手法の開発を行 うこととする。 るカメラキャリブレーション方法を同時調整法と呼 ぶこととする。図 1 に本手法で使用するトリプレッ ト画像の撮影方法およびキャリブレーション手順を 示す。 2. カメラキャリブレーション 本研究におけるカメラキャリブレーションとは 3 箇所(左、中央、右)において撮影されたトリプレ ット画像に対して計測空間中の 2 点間の距離と共線 条件式(式(1) )とを用いて、それぞれのカメラの 外部標定要素、および 3 つのカメラに共通な内部標 定要素を同時に取得しようとするものである。 本研究ではカメラキャリブレーションの際にトリ プレット画像上に共通な 9 点の特徴点を擬似基準点 として使用するが、これらの特徴点は画像上で確認 できれば良いもので、その 3 次元座標は既知である 必要はない。 また、本カメラキャリブレーションにおける未知 量は外部標定要素である左、中央、右カメラの位置 (X0L,Y0L,Z0L)、(X0C,Y0C,Z0C)、(X0R,Y0R,Z0R)、姿勢(ω0L, κ0L,φ0L)、(ω0C,κ0C,φ0C)、(ω0R,κ0R,φ0R)および 3 つのカメラに共通な内部標定要素であるカメラの 焦点距離f、主点の位置x0、y0、レンズ歪係数k1、k2、 画素座標から画像座標への変換係数a1、a2および擬 似基準点の 3 次元座標(Xi,Yi,Zi)となる。本研究では 共線条件式を用いてこれらの未知量を同時に調整す 以下に共線条件式(1)とレンズ歪の補正式(2) を示す。 (0,Y2,0) (0,0,0) D (X1,0,0) 2 点間の距離(D)を計測 図 1a 撮影方法 撮影・2 点間距離の測定 同時調整法 計測点の 3 次元座標の算出 図 1b 本手法における計測手順 m11( X − X 0 ) + m12 (Y − Y0 ) + m13(Z − Z0 ) ⎫ m31( X − X 0 ) + m32 (Y − Y0 ) + m33(Z − Z0 ) ⎪⎪ ⎬ (1) m ( X − X 0 ) + m22 (Y − Y0 ) + m23(Z − Z0 )⎪ y = − f 21 m31( X − X 0 ) + m32 (Y − Y0 ) + m33(Z − Z0 ) ⎪⎭ x = −f こ こ に 、 (X,Y,Z) : 擬 似 基 準 点 の 3 次 元 座 標 、 (X0,Y0,Z0):撮影点の 3 次元座標、(x,y):擬似基準点の 画像座標、mij:回転行列 dx = k1 ⋅ r 2 ⋅ x + k 2 ⋅ r 4 ⋅ x ⎫⎪ ⎬ (2) dy = k1 ⋅ r 2 ⋅ y + k 2 ⋅ r 4 ⋅ y ⎪⎭ ここに、 r = (x 2 像座標、dx, dy:補正量 3. 精度検証実験 3-1 実験概要 ) + y 2 、 x, y :補正前の像点の画 本研究では、上記で示した同時調整法の有効性を 検討するために、民生用デジタルカメラ CP900Z(図 2)を使用して精度検証実験を行った。表 1 に CP900Z の仕様を示す。 また、 精度検証実験を行うにあたり、 本研究では図 3 に示す検証用ターゲットを使用し、 検証用ターゲット上の円形ターゲットのうち黒丸 9 点をカメラキャリブレーション用の擬似基準点とし、 白丸 36 点を検証点とした。図 4 に選定した擬似基 準点、 検証点および検証用ターゲットの諸元を示す。 なお、円形ターゲットの中心座標は奥行き、平面 共に、±0.05mm の精度で作成されており、この 3 次 元座標を真値として使用した。また、擬似基準点お よび検証点の画素座標は、撮影した画像から二値化 処理により、面積重心によって求めた。表 2 に精度 検証実験を行った際の撮影条件を示す。 精度検証は検証点 36 点に対する平均二乗誤差を 算出することで行った。表 3 は本手法における内部 標定要素の初期値と調整結果であり、表 4 は算出さ れた各カメラの外部標定要素を示したものである。 また、表 5 に本手法での精度(Result01)および地 上基準点 9 点を用いて空間後方交会法にてキャリブ レーションを行った際の精度 (Result02)を示す。 表 5 より、本手法の精度は Result02 と比較して奥 行き座標に関しては同程度であり、平面精度に関し ては多少の低下が認められるが、本手法は事前の内 部標定要素の算出、および従来行われてきた地上基 準点設置に伴う測量を必要としないことを考慮する と、これらの時間的損失や労力を解消し、簡便な 3 次元計測において有効な計測手法であると期待され る。 表 3a 初期値(公称値) f 7 (mm) a1 289.6747 x0 1024 (pixel) y0 768 (pixel) a2 0 k1 0 k2 0 表 3b 算出された内部標定要素 図 2 CP-900Z (EPSON) f 表 1 CP900Z の仕様 センササイズ a1 289.6763 1/1.8inch x0 1011.24 (pixel) y0 799.85 (pixel) a2 -0.0042 k1 4.0201E-08 k2 -4.9294E-15 3.34 MegaPixel 総画素 7.2075(mm) f:焦点距離 x0,y0:主点位置 a1,a2:スケールファクター k1,k2:レンズディストーション係数 表 4 外部標定要素 図 3 検証用ターゲット 50 mm 480 mm Left Center Right X0(mm) -27.355 265.793 459.771 Y0(mm) 203.246 202.809 216.419 Z0(mm) 1022.802 1011.849 1012.619 ω 2°52′47″ 2°47′30″ 3°21′19″ φ 11°51′25″ -0°31′30″ -10°53′21″ κ 1°55′52″ 0°56′37″ 1°02′08″ X0、Y0、Z0:カメラの位置 ω、φ、κ:カメラの姿勢 表 5 精度検証 2 点間の距離 640 mm 擬似基準点 検証点 図 4 擬似基準点および検証点 表 2 撮影条件 撮影高度 1m 基線長 0.6m 基線比 0.6 二点間の距離 0.56m 3-2 精度検証結果 σxy(mm) σz(mm) Result01 ±0.130 ±0.126 Result02 ±0.067 ±0.091 σxy:平面精度 σz:奥行き精度 :カメラの位置 ω、φ、κ:カメラの姿勢 3-3 屋外検証実験概要 本研究では本手法の実用性を検討するため、東京 電機大学理工学部本館を対象として精度検証実験を 行った。使用した民生用デジタルカメラは上記精度 検証実験の際に使用した CP900Z である。図 5 に本 実験における概要を示す。なお、屋外実験において 対象建物にはターゲットを貼り付け、上記精度検証 同様に二値化処理を施し、面積重心にてターゲット の画素座標の算出を行った。また、図中白丸 9 点を 擬似基準点とし、残り 8 点のターゲットを検証点と した。また、ターゲットの 3 次元座標に関しては、 白丸の中心に貼り付けた反射ターゲットの中心をト ータルステーションにて計測し、得られた 3 次元座 標を真値として使用した。表 6 に本実験の撮影条件 を示す。 2 点間の距離 図 5 測定対象物 表 6 撮影条件 撮影高度 20.7 m 基線長 7.0 m 基線比 0.34 対象物の幅 約 17 m 対象物の高さ 約 12 m 2 点間の距離 14.435m 3-4 精度検証結果 本手法を用いた検証点 8 点に対する平均二乗誤差 の結果(Result01)および地上基準点 9 点を用いて 空間後方交会法にてキャリブレーションを行った際 の精度(Result02)を表 7 に示す。本手法の精度は 前述の精度検証実験と同様な傾向を示した。すなわ ち、 奥行き精度に関しては Result02 と同程度の精度 であり、平面精度に関しては多少の低下が認められ るが、本手法は簡便な 3 次元計測において有効な計 測手法であると期待される。また、上記の精度に対 する要因としては X 軸、Y 軸上の擬似基準点の Z 座 標を既知量としているためと考えられる。 表 7 精度検証実験結果 σxy σz (mm) Result01 (mm) ±5.540 ±6.224 Result02 ±2.474 ±7.533 σx:平面精度 σz:奥行き精度 :カメラの位置 ω、φ、κ:カメラの姿勢 4. 応用事例 本研究のキャリブレーション手法により、 地上基準 点測量を必要としないデジタルカメラによる簡便な デジタル写真測量が可能となった。そこで本手法の 有効性を確認するために、近年注目されている文化 資産の記録、バーチャルリアリティの構築の観点か ら文化財の 3 次元計測および 3D モデリングを行った。 なお本研究ではイタリアのポンペイ遺跡内の城壁を 対象とした。 4-1 計測方法 今回計測対象としたポンペイ遺跡内の城壁は、高 さ約 3m、幅約 40m と広範囲であり、計測現場におい て計測対象範囲がトリプレット画像 1 シーンに収ま るような撮影高度の確保が出来ないため、計測対象 範囲を 8 シーンに分割し、 合計 24 枚の画像を用いて 3 次元計測を行った。計測対象範囲に対し、左端か ら第 1 シーンと定義する。以下に詳細な 3 次元計測 手法を示す。 1) 各シーンのトリプレット画像および計測空間中の 2 点間の距離を用いて各シーン独立した座標系に おいて 3 次元座標を算出する。 2)本研究では隣り合ったシーンにおいて、オーバー ラップ領域を設けて撮影を行っている。したがっ て、オーバーラップ領域内において共通な特徴点 の 3 次元座標を用いて座標系を統合する。具体的 には、第 1 シーンの座標系を基準とし、第 2 シー ンのモデルの平行移動量、回転量、縮尺係数の算 出を行い、第 1 シーンの座標系へ変換し、順次第 8 シーンまで座標統合を行う。 3)各シーンの座標統合を行うにあたり、誤差の蓄積 が考えられる。本研究では誤差の補正方法として、 計測対象物に対して広角撮影されたトリプレット 画像を用いることとした。広角撮影されたトリプ レット画像を用いて、3 次元座標の算出を行い、 次に 2)で第 1 シーンの座標系に統合されたモデ ルと共通な特徴点の 3 次元座標を用いて、広角撮 影されたシーンへ座標変換を行い、誤差の補正を 行った。 計測手順 3)にて行った座標統合の際に生じる誤差 の補正手法の有効性を検証するために、図 6 に示し た点Aから点B∼Fに対して地上レーザ測量の結果よ り算出される距離Diと、本手法より算出される距離 Liとの比較を行ったものが図 7 である。 図 7 は横軸を点Aからの各点までの距離とし、縦軸 に誤差(Li-Di)を示したものである。図 7 より補正 前においては点Aから遠ざかるにつれて誤差の累積 が生じているが、本手法を用いることにより誤差の 補正が行われたことが確認できる。したがって本手 法は座標統合の際に生じる誤差の補正において有効 な計測手法であると期待される。また図 8 に作成さ れた城壁の 3Dモデルを示す。 y B A C F D E x 図 6 計測対象物 表 8 精度検証結果 残差 (mm) 400 補正前 補正後 300 200 100 D C B 0 5000 10000 E 15000 X (mm) F 20000 25000 残差 (mm) Result1 (mm) Result2 (mm) A 3417 3421 4 B 2967 2970 3 C 430 431 1 D 2982 2978 -4 E 706 703 -3 F 651 650 1 G 500 500 0 図 7 距離と誤差の関係 5. 結論 図 8 3D モデル 4-2 精度検証 ここでは城壁の 3D モデルに対する精度検証を行 うために、図 7 中に示す線分長に対して本手法と地 上レーザ測量(A∼E)および直接距離測定(F,G)と の比較を行った。表 8 に本手法により取得される 3 次元座標から算出される距離(Result1)および地上 レーザ測量により取得される 3 次元座標結果から算 出された距離と直接距離測定による値(Result2)を 示す。 表 8 より本手法の結果から算出される 2 点間の距 離は地上レーザ測量および直接距離測定による測定 値とほぼ同程度の値となった。したがって、本手法 は計測現場における地上基準点測量を必要とせず、 さらに民生用デジタルカメラによる安価な 3 次元計 測手法であることを考慮すると、簡便な 3 次元計測 において有効な計測手法であると期待される。 参考文献 (1)近津博文、國井洋一、中田隆司、大嶽達哉; 民生用デジタルカメラによるデジタル写真測量システム 3DiVision の構築、写真測量とリモートセンシング、42 巻 3 号、pp.6-16 B (2)解析写真測量委員会編;解析写真測量、社団法人日 本写真測量学会発行、1983 D A 本研究では、民生用デジタルカメラによる簡便な デジタル写真測量を目指し、地上基準点を必要とせ ず、且つ事前に内部標定要素の算出を必要としない 3 次元計測手法の開発および精度検証を行った。本 手法による精度は 9 点の地上基準点を用いたセルフ キャリブレーションとの比較において平面精度は多 少低い値を示すものの、奥行き精度はほぼ同等な値 が得られることが確認された。また、バーチャルリ アリティの構築、文化資産の記録を目的とした文化 財の 3 次元計測においても本手法は地上レーザ測量 と同程度の精度が得られ、本手法の有効性が確認さ れた。これらの結果、本手法は地上基準点設置に伴 う測量および事前の内部標定要素の算出も必要とせ ずに測定対象物の 3 次元計測を行うことが可能であ り、民生用デジタルカメラによる簡便なデジタル写 真測量を可能にするものと期待される。 一方、精度の向上、さらに X,Y 軸に対する拘束条 件の削除などが今後の課題に挙げられる。 F C E (3)村井俊治著;空間情報工学、社団法人日本測量協会 発行、1999 (4)社団法人日本写真測量学会、動体計測研究会編;デ G ジタル写真測量の理論と実践、社団法人日本写真測量協会 発行、2004 図 7 精度検証用直線距離
© Copyright 2026 Paperzz