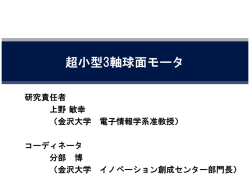
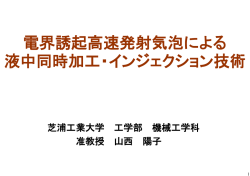
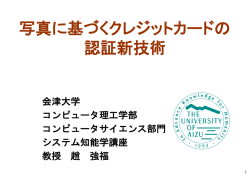
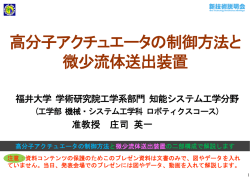
超高速!ステレオ動画像認識: 安全運転支援システム 金沢大学 理工研究域 電子情報学系 講師 深山正幸 従来技術とその問題点 • ステレオマッチングによる距離画像を用いた車両検 出が実用化されている。 • 左右画像の画素単位のマッチングを行い、移動量 から視差を測定し、視差の分布を表した距離画像を 生成する。 左カメラ画像 右カメラ画像 距離画像 2 従来技術とその問題点(続き) • ステレオマッチングによる車両検出の問題点 – 白線検出を用いた路面検出との組合せが必要 – 領域分割と物体認識には距離ヒストグラムの解 析が必要 – 車両追跡には他の手法との組合せが必要 – 車両検出に特化しており他への応用が困難 – 画素単位の処理であるため高演算量、高コスト 3 従来技術とその問題点(続き) • 動き分割は動画像から物体の領域と動きを同時に 検出する技術である。 • 一つの領域の動きは平行移動、拡大縮小、回転な どを表現可能な一つの動きモデルで表される。 • 特定の動きモデルと一致する動きを持つ隣接する 複数の画素が一つの領域を構成する。 回転するボール 高層ビルの空中旋回撮影 走行中の車両前方 4 従来技術とその問題点(続き) • 動き分割の問題点 – 静止物体の検出不可能 – 動き推定と領域分割を何回も繰り返すため、演 算量が大きく、高速な計算機でも実時間処理が 困難 – 物体認識のための特徴量抽出とクラス分類が別 途必要 5 新技術の特徴 • ステレオ動き分割の導入 • 高速アルゴリズムと低電力アーキテクチャ • 対象を特定しない汎用性 (a) 左画像 (d) 路面検出 (b) 右画像 (e) 路面上の物体検出 (c) 領域分割 6 (f) 動きによる領域分割 新技術の特徴(続き) • ステレオ動き分割の導入 – ステレオ動画像に動き分割を適用することにより静 止物体の検出可能 – 物体検出に必要な空間的な3次元構造と時間的な位 置形状変化を同一原理で取得 – 視差モデルの導入により動き分割だけで路面と立体 物を区別して検出可能 – 動き分割の副産物である輝度勾配行列を画像特徴 量として物体認識に用いることで特徴量計算を省略 – 動き分割は物体の領域と動きを同時に検出できるの で他の手法と組み合わせなくても単独で領域分割と 物体追跡が可能 7 新技術の特徴(続き) • 高速アルゴリズムと低電力アーキテクチャ – 動き分割アルゴリズムのループ構造を改良し、 動き推定と領域分割を頻繁に繰り返して収束を 早め、演算量を25%に削減 – 動き推定と領域分割を画素毎に連続してパイプ ライン処理する新回路構成を考案し、スループッ ト性能10倍向上、低電力実時間化 8 新技術の特徴(続き) • 対象を特定しない汎用性 – 視差モデルと輝度勾配特徴量の導入、動き分割の 高速化・低電力化により応用範囲を拡大 – 安全運転支援に幅広く応用可能 • • • • 前方車両、歩行者、その他物体の検出・追跡 路面、レーン、ガードレールの検出・追跡 後方や側面の物体検出 運転者の視線検出・追跡 – 頭部姿勢推定やジェスチャ認識によるマンマシンイン タフェースにも応用可能 – 人物、交通、自然を対象とした監視にも応用可能 9 従来技術との比較 • 動き分割自体の高速化だけではなく、その結果を物体 の認識や追跡にも利用することにより、全体の演算量 が従来技術より低い。 • 従来技術は処理毎に異なる手法を採用していたが、提 案技術は動き分割を共通に用いるため、実装規模が小 さくなり低コスト化しやすく、集中的な改良により高性能 化しやすい。 • 従来技術は特定の応用に限定されていたが、動き分割 に視差モデルと輝度勾配特徴量を導入した提案技術は 汎用的であり、他用途へ展開しやすく、低コスト化が期 10 待できる。 実験結果 • ステレオカメラで車両前方を撮影した動画像 に動き分割を適用し、車両や路面の検出と、 相対的な距離推定と追跡ができた。 far near (a) 路面検出 (b) 距離画像 11 想定される用途 • 安全運転支援 – – – – 前方車両、歩行者、その他物体の検出・追跡 路面、レーン、ガードレールの検出・追跡 後方や側面の物体検出 運転者の視線検出・追跡 • ヒューマンマシンインタフェース – 頭部姿勢推定、顔表情認識への応用 – ジェスチャ認識への応用 – 低電力を生かした多様な機器への応用 • パソコン • ゲーム機 • スマートフォン、タブレット端末 • 監視 – 人物、交通、自然を対象とした異常検出 12 実用化に向けた課題 • 現在、ステレオ動き分割による車両検出・追 跡および路面検出の基本能力を確認済み。 • VGA 60 fps@60 MHzの回路構成を考案済み。 • 今後、物体認識を含めた車両検出・追跡シ ステムの実験データを取得し、性能評価を 行う。 • 車両等の検出精度や距離推定精度を実用 レベルまで向上させる技術を確立する必要 あり。 13 企業への期待 • 路面検出や車両認識との組合せにより従来と 同等以上の車両検出および距離推定精度を 達成できると考えている。 • 安全運転支援技術や画像処理用組込み技術 を開発している企業との共同研究を希望する。 • また、ヒューマンマシンインタフェースや監視 分野への展開を考えている企業には、本技術 の導入が有効と思われる。 14 本技術に関連する知的財産 • • • • 発明の名称:情報処理装置,及び,情報処理方法 出願番号:特願2011‐247600号(2011/11/11) 出願人:国立大学法人 金沢大学 発明者:深山正幸 • 発明の名称:運転支援システム,運転支援方法,及び, プログラム • 出願番号:特願2011‐249916号(2011/11/15) • 出願人:国立大学法人 金沢大学 • 発明者:深山正幸 15 お問い合わせ先 (有)金沢大学ティ・エル・オー ライセンシング・アソシエイト 木下 邦則 TEL 076-264-6118 FAX 076-234-4018 e-mail e-mail-to@kutlo.incu.kanazawa-u.ac.jp 16
© Copyright 2026 Paperzz