HMM(Hidden Markov Model)
による音声認識(2)
ー連続分布型HMM,学習-
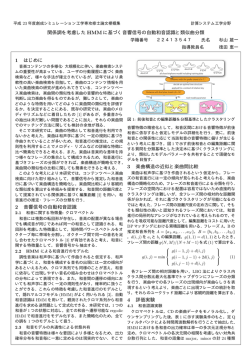
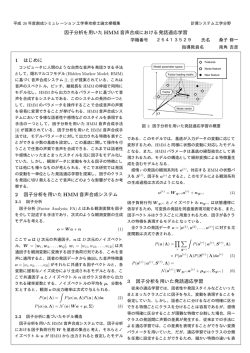
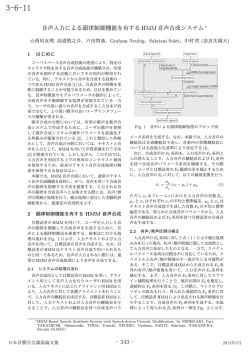
離散分布型HMM
S0
a22=0.2
a11=0.6
離散分布型HMM(離散HMM):
状態における特徴量の分布が
離散的
a01=1.0
S1
a12=0.4
S2
b2(v1) = 0.6
b2(v2) = 0.4
b1(v1) = 0.7
b1(v2) = 0.3
p(v)
p(v)
0.7
0.6
0.4
0.3
v1
v2
a23=0.8
v1
v2
S3
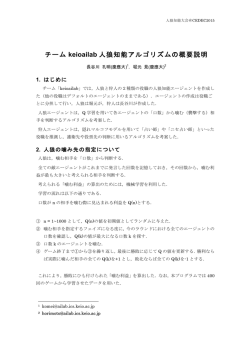
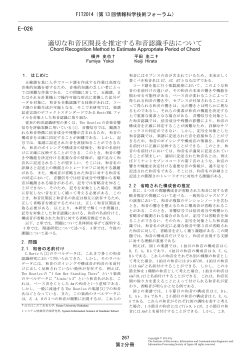
連続分布型HMM
S0
a01=1.0
a22=0.2
a11=0.6
連続分布型HMM(連続HMM):
状態における特徴量の分布が
連続的
S1
a12=0.4
S2
a23=0.8
S3
p(c) wm N (c; μ m , Σ m )
m
N (c; μ m , Σ m )
1
2
D
Σm
1
T
1
exp c μ m Σ m c μ m
2
p(c)
p(c)
c1
c2
c1
c2
ケプストラム分布
正規分布に従うことが多い
量子化誤差を防ぐためにも連続分布で表
現することが望ましい
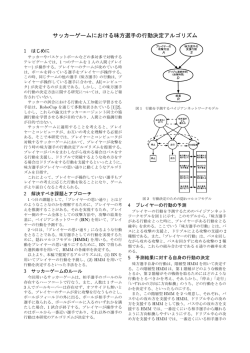
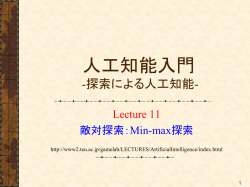
DPとHMM
DPマッチング
標準パターン
標準パターンからの距離は常に同等に評価する
DPとHMM
HMM
局所的に標準パターン(≒平均)からの距離が変動する
HMM3つの基本問題
モデル(HMM)に対する観測系列(音声ではケ
プストラムなど)の出力確率の計算
1.
前向きパス(Forward)アルゴリズム
最適な状態系列を求める
2.
ビタビ(Viterbi)アルゴリズム
モデルから観測系列を出力する確率を最大と
するモデルのパラメータの設定
3.
EMアルゴリズム、Baum-Welchアルゴリズム
最尤推定
尤度(likelihood):ある仮説(モデル;λ)の
もとで観測された事象(o)が生じる確率
p(o|λ)
尤度が最大となるようにパラメータ推定を
行うことを最尤推定という
最尤推定の例(1)ー離散分布ー
事象{Xi | i=1, …, M}の確率Θ={pi}(i=1, …, M)を推定
観測系列O(Xiの系列)を得た結果Xiの回数がniであったとき
M
条件:
pi 1 の下で P(O | )
i 1
M
ni
(
p
)
i の対数を最大化
i 1
ラグランジュの未定乗数法で
M
M
M
L ln P(O | ) 1 pi ni ln pi 1 pi
i 1 i 1
i 1
Piでの偏微分を0とした式と条件式を連立させて解くと
M
ni
i 1
piML
ni
M
n
i 1
i
最尤推定の例(2)ー連続分布ー
正規分布に従う確率変数Xの分布パラメータΘ={μ, σ2}を推定
観測系列O(Xiの系列、i=1,N)を得たとき
確率分布
( x )2
1
fX (X )
exp
のパラメータΘ={μ, σ2}を
2
2
2
N
( X i )2
1 N
2
L ln P(O | ) ln f X ( X i ) ln( 2 ) ln( )
2
2
i 1
i 1
の最大化で求める。μ、σ2での偏微分を0として解くと
ML
1
N
N
Xi
i 1
( ML ) 2
1
N
1
2
X
i
i 1
N
N
X
i
i 1
N
2
隠れ変数がある場合
ーEMアルゴリズムー
観測できない変数(隠れ変数、HMMでは状態
系列)が存在する場合には繰り返しアルゴリズ
ムで解く必要がある。
観測可能変数をx、観測できない変数をzとして
1.
2.
Θの初期値を設定する
[E-step] (x,z)の対数尤度の条件付期待値を計算
Q( | ) E log p( x, z; ) | x,
(t )
3.
[M-step] Θを更新する
(t 1)
(t )
EMアルゴリズムによる推定の例
ー混合正規分布(1/2)ー
混合正規分布に
M
p( x; ) wm N ( x; m , m2 )
m 1
従う確率変数Xの分布パラメータΘ={wm,μm, σm2}を推定
観測系列O(Xiの系列、i=1,N)を得たときの推定
ここで、観測できない変数は、どの正規分布からの出力であるかを示す
変数であり、z∈{1,…M}とする
1.
2.
各変数に適当な初期値を設定する
各サンプルXjに対する観測できない変数zの条件付確率を求める
p ( z | X j ; ( t ) )
wz(t ) N ( X j ; z(t ) , z )
M
w
m 1
(t )
l
N ( X j ; m(t ) , m )
EMアルゴリズムによる推定の例
ー混合正規分布(2/2)ー
1.
2.
各変数に適当な初期値を設定する
各サンプルXjに対する観測できない変数zの条件付確率を求める
p ( z m | X j ; )
(t )
wz(t ) N ( X j ; z(t ) , z )
M
w
m 1
(t )
l
N ( X j ; m(t ) , m )
3. 重み確率を更新する
( t 1)
m
w
1 N
p ( z m | X j ; ( t ) )
N j 1
4. 各正規分布のパラメータを以下の式で更新する
2 ( t 1)
m
( t 1)
m
1
Nwm(t 1)
1
Nwm(t 1)
N
N
p( z m | X
j 1
j
; ( t ) ) X j
(t )
2
( t 1) 2
p
(
z
m
|
X
;
)
X
j
j
i
j 1
EMアルゴリズムによるHMMのパラ
メータ推定
EMアルゴリズムをHMMのパラメータ推定
に適用=Baum-Welchアルゴリズム
導出は以下などを参照のこと
中川聖一「確率モデルによる音声認識」電子
情報通信学会、1998
L. Rabinerら「音声認識の基礎(下)」NTTアド
バンスドテクノロジ(株)、1995
鹿野清宏ら「音声認識システム」オーム社、
2001
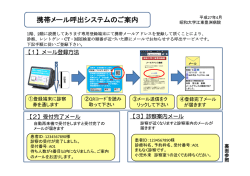
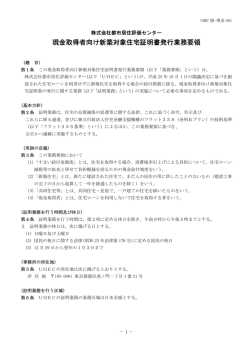
前向き確率と後ろ向き確率
α(m,t)
β(m,t)
(注) α(m,t)にはb(xt)を含まず、
β(m,t)には含む
0
状態m
M
0
1
時刻t
T
前向き確率と後ろ向き確率
時刻t
状態m
β(m,t)
状態m
α(m,t)
時刻t
α(M,T)
=β(0,0)
パラメータ更新式(状態遷移確率)
状態mから状態lへの状態遷移確率
T
aˆ ml
(m, t )a
t 1
b ( xt ) (l , t 1)
ml m
T
(m, t ) (m, t )
t 1
状態m 状態l
α(m,t)
β(l,t+1)
パラメータ更新式(出力確率)
出力確率分布(離散分布の場合)
T
bm (vk )
(m, t ) (m, t )
t 1:v ( t ) v k
T
(m, t ) (m, t )
t 1
パラメータ更新式(出力確率)
出力確率分布(離散分布の場合)
T
bm (vk )
(m, t )(v(t ) v
t 1
T
k
?1 : 0) (m, t )
(m, t ) (m, t )
t 1
パラメータ更新式(出力確率)
出力確率分布(無相関正規分布の場合)
T
ˆ m
(m, t ) x (m, t )
t 1
T
t
(m, t ) (m, t )
t 1
2
T
2
(
m
,
t
)
x
(
m
,
t
)
(
m
,
t
)
x
(
m
,
t
)
t
t
ˆ m2 t 1T
t 1T
(m, t ) (m, t ) (m, t ) (m, t )
t 1
t 1
T
T
(m, t ) x (m, t )
t 1
T
2
t
(m, t ) (m, t )
t 1
ˆ m2
パラメータ更新式
ー複数学習データの場合ー
複数観測系列O(k)(xt(k)の系列、t=1,…,T, k=1,…,K)を得たときの推定
データ状態mから状態lへの状態遷移確率
T
1
(k )
(k )
(k )
(
m
,
t
)
a
b
(
x
)
(
l
,
t
1
)
ml m
t
(k ) (M , T )
k 1
t 1
aˆ ml
K T
( k ) (m, t ) ( k ) (m, t )
K
k 1 t 1
状態の出力確率(無相関正規分布)
K
ˆ m
(k )
k 1 t 1
K T
K
ˆ m2
T
k 1 t 1
T
(k )
k 1 t 1
K T
k 1 t 1
(m, t ) xt ( k ) (m, t )
(k )
(k )
(m, t ) ( k ) (m, t )
(m, t ) xt( k ) 2 ( k ) (m, t )
(k )
(m, t ) ( k ) (m, t )
ˆ m
2
© Copyright 2026 Paperzz