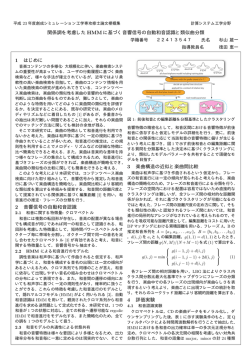
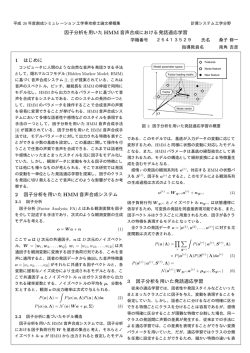
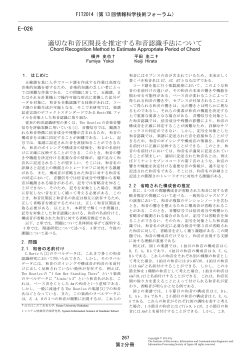
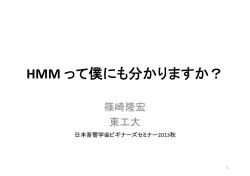
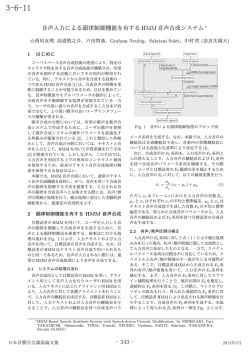
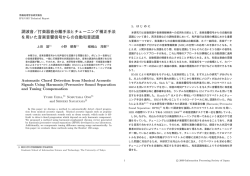
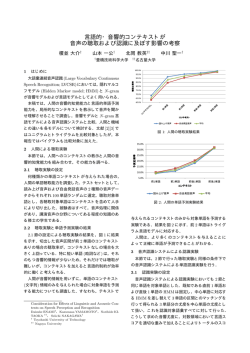
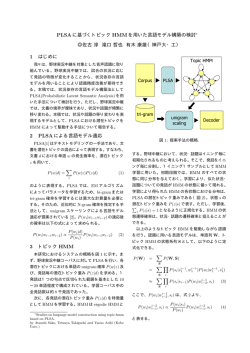
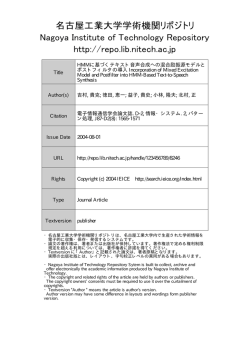
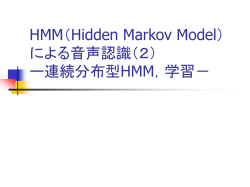
サッカーゲームにおける味方選手の行動決定アルゴリズム 1 はじめに サッカーやバスケットボールなどの多対多で対戦する テレビゲームでは、1 つのチームを 1 人の人間 (プレイ ヤー) が操作する。プレイヤーのチームが攻めている時 は、ボールを持っている選手をプレイヤーが操作する。 この時、同じチームの他の選手(味方選手)の行動は、プ レイヤーが操作している選手に合わせ、AI(コンピュー タ) が決定するのが主流である。しかし、この味方選手 の行動の決定方法に関する研究については、ほとんど報 告されていない。 サッカーの試合における行動を人工知能に学習させる 手法は、RoboCup を通じて多数発表されている [1][2]。 しかし、これらの論文はサッカーエージェント同士の協 調行動を学習させる事が目的であり、人間との協調行動 が目的ではない。 サッカーゲームに適用することを考えると、プレイ ヤーとコンピュータが、お互いの考えを理解する必要が ある。そこで本研究では、プレイヤーとコンピュータが 対戦するサッカーゲームにおいて、プレイヤーが攻撃を 行う時の味方選手の行動決定アルゴリズムを提案する。 プレイヤーがパスをまわしながら攻める場合はパスをす る行動を支援し、ドリブルで突破するような攻め方をす る場合はドリブルをする行動を支援するといったように、 味方選手がプレイヤーの思い通りに動くようなアルゴリ ズムを目指す。 これによって、プレイヤーが操作していない選手もプ レイヤーの考えに応じた行動を取ることになり、ゲーム がより面白くなると考えられる。 図 1 行動を予測するベイジアンネットワークモデル 2 解決すべき課題とアプローチ 1 つ目の課題として、「プレイヤーの思い通り」とはど のようなことなのかを理解するために、プレイヤーの考 えを推測することがある。それを実現するため、プレイ ヤー側のチーム全体としての攻撃方法や、攻撃の結果を 基に、ベイジアンネットワーク (BN) を用いて、プレイ ヤーの行動を予測する。 2 つ目は、「プレイヤーの思い通り」になるような行動 をとることである。味方選手としての行動を実現するた めに、隠れマルコフモデル (HMM) を用いる。その行 動をプレイヤーの思い通りにするために、BN で得られ た選択確率を用いて、HMM の各確率を決定する。 以上より、本稿で提案するアルゴリズムは、(1) BN を 用いてプレイヤーの行動を予測し、(2) HMM を用いて 行動を決定するといった手法をとる。 図2 行動決定のための隠れマルコフモデル 4 プレイヤーの行動の予測 プレイヤーの行動を予測するためのベイジアンネット ワークモデルを図 1 に示す。このモデルから、 「味方選手 がある行動をとった時に、プレイヤーがある行動をとる 確率」を求める。ここでいう「味方選手の行動」とは、パ スによる攻撃の支援と、ドリブルによる攻撃の支援の 2 種類である。また、 「プレイヤーの行動」は、パスを回し ながら攻める攻撃と、パスを回さずに攻める攻撃の 2 種 類である。これらの組み合わせである 4 通りの確率を求 める。 5 予測結果に対する自身の行動の決定 味方選手自身の行動は、階層型 HMM を用いて決定す る。この階層型 HMM は、第 1 階層がどのような戦術を 3 サッカーゲームのルール とるか、第 2 階層がその戦術を取るためにはどのような 今回用いるサッカーゲームは、相手選手のゴールのみ 行動をとるべきかを考え、それらから、「停止」「走行」 存在するハーフコートで行なう。また、人数は 1 チーム 「いずれかの方向に方向転換」のうち、どの行動をとるの 3 人でゴールキーパーは存在せず、オフサイドも無いと かを決定する、といったものにする。 する。プレイヤーのチームが常に攻撃を行なうものとし、 また、この階層型 HMM を 2 つ用意し、それぞれ、パ ボールがフィールドの外に出る、ボールが相手チームの ス中心の攻め方を支援する HMM、ドリブル中心の攻め 選手に取られる、ボールがゴールに入るのいずれかを満 方を支援する HMM として扱う。パス中心の攻め方を支 たした場合、1 試合が終了する。プレイヤーが操作する 援する HMM では、一番近くにいる相手選手から離れる のはボールから一番近い選手であり、それ以外の選手の ように方向転換しやすいようにする。ドリブル中心の攻 行動は本研究のアルゴリズムが決定する。 め方を支援する HMM では、一番近くにいる相手選手の いる方向に近づくように方向転換しやすいようにする。 ドリブルを中心に攻めるか、パスを中心に攻めるか の状態遷移確率は、前節で求めた、プレイヤーの選択 確率を用いる。それ以外の状態遷移確率、出力確率は Baum-Welch アルゴリズムを用いて求める。 なお、この HMM を実装して実験を行った結果、ドリ ブルを支援する行動をとった時に、味方選手が相手選手 が張り付いたまま動かないことが何度かあった。そこで、 相手選手との位置関係だけでなく、ボールを持っている 選手の位置関係も考慮するようにした。その HMM を図 2 に示す。 6 実験 25 人の学生に、サッカーゲームをやってもらう実験を 行なった。提案手法に基づいて動く選手が味方である場 合と、RoboCup 向けに提案された、プレイヤーの意図に 関する推論を行なわず、HMM を用いた行動決定をする 手法 [2] に基づいて動く選手が味方である場合で、それぞ れ 30 試合ずつ人間との対戦を行なった。30 試合終わっ たあとで、被験者に、 • 面白かったか (10 段階評価) • 味方選手は自分の思ったとおりに動いてくれたか (10 段階評価) • 味方選手はどのように動いたか (自由記述) の 3 つのアンケートに答えてもらった。 7 結果 アンケートの 10 段階評価の結果を図 3 に示す。提案 手法の方が面白かった人がわずかに多かったが、思い通 り動いたかについては、どちらとも言えない結果となっ たと言える。 次に、自由記述欄をもとに、味方選手がどのように動 いたのかを調べる。 提案手法の方が面白かったという被験者は、提案手法 における味方選手の動きについて、「広がるように動い た」 「敵選手から離れた」などと回答していた。このこと から、味方選手は相手チームの選手から離れ、パス中心で 攻める行動を支援するように動き、その結果、この被験者 の思った通りにパスをまわしながら攻撃できたことが分 かる。実際に試合中の動きを確認したところ、マークの 外れた選手にパスを回し、そこからドリブルしてシュー トする、という動きが確認できた。パスを回した直後の 状態を図 4 に示す。 既存手法の方が面白かったという被験者は、提案手法 における味方選手の動きについて、 「敵選手を振り切れな かった」などと回答していた。しかし、この被験者の場 合でも、味方の選手から離れ、パスを受け取ろうと動い ていることが確認できた。 8 おわりに 本研究では BN を用いて行動を予測し、HMM を用い て行動を決定するという手法を提案した。そして、実験 より、既存の手法より面白くなることが確認できた。 今後の課題は、他の守備の行動パターンに対しても、 本手法を用いた攻撃方法が有効であるかの検証が挙げら れる。 図3 図4 実験結果 思った通りに動いた結果 参考文献 [1] 熊田陽一郎, 植田一博:「予測能力を持つサッカーエー ジェントによる協調戦術の獲得」, 人工知能学会論文 誌,16 巻 1 号,p120-127, 2001. [2] 野田五十樹,「HMM による協調動作の模倣学習」, 第 17 回人工知能学会全国大会, p.207-210, 2001.
© Copyright 2026 Paperzz